

1. 서 론
항만 DGPS (Differential GPS) 서비스는 DGPS 기준국으로 부터 전파 통달거리 이내의 항만 사용자에게 RTCM SC-104 포맷의 GPS 보정정보를 비콘 중파로 전달함으로써, 사용자 측에서 DGPS 정밀 측위가 가능토록 함에 있다. 이를 위하여 DGPS 기준국은 정확한 기준국 위치 정보를 바탕으로 GPS 신호에 대한 차분 보정정보인 PRC (Pseudo-Range Correction)와 보정정보에 대한 품질 판단 변수인 보정나이 (Correction age), UDRE (User Differential Range Error) 파 라미터를 사용자에게 서비스한다(RTCM, 2001). 사용자는 서 비스 받은 GPS 보정정보를 의사거리 수준에서 차분 보정한 후에 위치를 측정함으로써 개선된 정밀 측위 성능을 확보할 수 있다.
일반적으로 기준국과 100km 이내의 거리에서는 DGPS의 정 밀 측위 성능이 1m(95%) 수준으로 알려져 있으며, 이는 기준 국으로부터 사용자 간의 거리, 기준국과 다른 전파 환경 요소, 보정나이, UDRE와 같은 변수에 의존적이다(Misra, 2006). DGPS는 항공을 대상으로 한 위성항법보강시스템인 WAAS (Wide Area Augmentation System) 또는 LAAS (Local Area Augmentation System)와 같이 강건한 신뢰성을 요구하는 특 정 사용자나 협소한 특정 구역을 대상으로 하는 서비스가 아 니기 때문에 요구 성능에 대한 제약이 소략하다. 하지만 최근 들어 해양 분야에서도 항만 영역에 따라 수치적으로 구체화된 성능을 요구하고 있고, 측위 정확도뿐만 아니라 무결성, 연속 성, 가용성 면에서도 보장을 요구하고 있다(IMO, 2002). 이에 비하여 사용자 입장에서는 아직, DGPS 서비스만으로 IMO (International Maritime Organization)에서 요구하는 HEA (Habor Entrance and Approach) 영역에서의 성능을 모두 만 족시키기에 불충분하다. DGPS는 최근까지 고도화를 위한 지 속적인 연구가 진행되었지만, SDR 기반의 RSIM 개발(Park, 2009; Seo, 2009), DGPS를 DGNSS로의 확장(Seo, 2014), 기준 국 입장에서의 감시 체계 개선(Cho, 2007; Seo, 2011; Seo, 2012)을 위한 연구가 대부분이었으며, 사용자 입장에서의 성 능 보장을 위한 연구는 미비한 실정이다.
본 논문에서는 기존 DGPS 서비스는 유지하면서 국내 주요 항만을 대상으로 DGPS 서비스의 감시, 보장, 공지 기능을 강 화하여 DGPS 성능을 보강하기 위한 향상된 감시 기법을 개 념적으로 제안하고자 한다.
2. 향상된 DGPS 감시 기법의 필요성
2.1 국내 DGPS 시스템 구성 및 배치
국내 DGPS 서비스는 항만 입출항 및 협수로 통항선박의 안 전운항과 내륙 측위 서비스 제공을 위하여 중앙사무소 1개소, 내륙/해양 기준국 17개소, 내륙/해양 감시국 15개소를 운영 중 에 있으며, 시스템의 배치도는 Fig. 1과 같다(NMPNT, 2015).

중앙사무소는 전국의 DGPS 기준국과 감시국의 운영 상태를 실시간 감시 및 제어하고, DGPS 이용 상황을 실시간으로 모 니터링하고 분석하는 역할을 수행한다. 기준국은 크게 보정정 보를 생성하고, 사용자에게 방송하고, 서비스한 보정정보를 상 시 감시하는 기능을 수행한다. 이를 수행하기 위하여 기준국 은 이미 알고 있는 정확한 위치에서 GPS 위성신호를 수신한 후에 측정된 거리와 알고 있는 거리를 비교하여 그 차이값 즉, 차분 보정정보를 생성하고, RTCM SC-104 포맷에 따라 주파 수 283.5-325kHz로 중파방송을 통해 사용자에게 실시간으로 방송하며, 생성/방송한 보정정보를 다시 수신하여 보정정보의 품질이나 보정 후 측위성능이 한계치를 벗어나면 해당 채널을 제외하고 서비스한다.
감시국은 기준국으로부터 일정한 거리가 떨어진 지점에서 기 준국 신호를 상시 감시하여 보정정보의 품질이나 보정 후 측 위성능이 한계치를 벗어나면 경보 메시지를 중앙사무소에 전 달한다. Fig. 1을 통해 DGPS 시스템의 배치도 외에, HEA 요 구 성능을 만족해야 하는 국내 주요 항만의 위치와 각 항만을 서비스하고 있는 DGPS 기준국, 그리고 각 기준국의 상태를 모니터링하고 있는 지정된 감시국의 배치를 보였다. DGPS 기 준국은 국내 전 지역을 서비스 범위에 포함하기 위해 전파도 달범위를 고려하여 배치되어 있으며, DGPS 감시국은 DGPS 기준국의 서비스 범위 내에서 임의로 일정한 거리가 떨어진 지점에 위치한다. 즉, 현재 DGPS 서비스를 감시하기 위한 시 스템의 배치는 전파도달범위만을 고려하였을 뿐 주요 항만을 감시 대상으로 하고 있지 않으며, 따라서 주요 항만에서의 성 능을 보장하기에 적합하게 구성되어 있지 않은 실정이다.
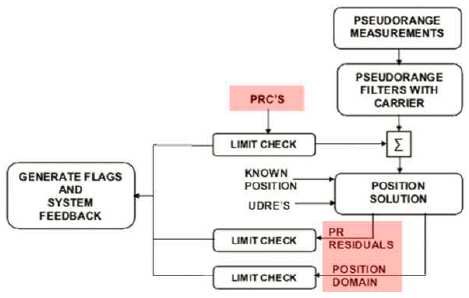
2.2 현재 DGPS 서비스에서의 무결성
현재 DGPS 시스템은 기준국과 기준국마다 지정된 감시국에 서 DGPS 서비스에 대한 감시 기능을 수행하고 있으며, IALA (International Association of Marine Aids to Navigation and Lighthouse Authorities) 권고문서에 제시된 세부 감시 항목은 Table 1과 같고(IALA, 2004), RSIM (Reference Stations and Integrity Monitors) 기술문서에 제시된 기준국 및 감시국 내 의 무결성 감시를 위한 구성은 Fig. 2와 같다(RTCM, 2006). Table 1 및 Fig. 2에서 표시한 바와 같이 DGPS 서비스에 대 한 감시 기능은 GPS 원시 데이터가 아닌 보정정보 및 보정 후 측위 성능에 치중해 있으며, 최근까지 사용자 입장에서의 요구 성능이 구체적으로 제한되지 않았던 만큼 임계치 수준도 크게 설정되어 있다. 뿐만 아니라 현재 DGPS 서비스에서의 공지 기능은 임계치 수준을 만족하지 못하는 위성 및 기준국 에 대하여 보정 서비스를 제공하지 않는 방식을 사용함으로써 사용자 측에서의 서비스 활용도에 있어서 제약적이다.
분석한 바와 같이, 기존 DGPS 감시 기능은 보정정보 및 보 정 후 측위 성능만을 대상으로 감시하고, 공지 기능의 활용도 가 미약하기 때문에 엄격한 무결성 조건을 요구하는 환경에서 사용자의 요구 성능을 만족시키기에 불충분하고, 위성에 예기 치 않은 이상이 발생하여 원시 데이터의 오차가 증가하는 경 우에 효과적으로 대응하기 어렵다. 이는 위성 이상이 발생했 던 과거 사례를 통해 확인할 수 있는데, 지난 2004년 1월 1일 에 PRN 23 위성의 원자시계 이상이 발생했을 때에 DGPS는 해당 이상 위성만 검출하여 예외 처리하지 않고 PRC 감시를 통해 “측위보정 서비스 불능 상태”를 약 3시간 동안 경보하였 다(Cho, 2007; Seo, 2011; Seo, 2012).
2.3 항만용 사용자를 위해 요구되는 항법 성능
Table 1에서와 같이 다른 응용분야에 비하여 개략적인 성능 조건을 요구했던 해양 분야에서도 최근 들어 항만 구역에 따라 서 구체화된 성능을 요구하고 있고, 측위 정보를 확보하기 위한 위성항법시스템의 활용도 및 의존도도 급격히 증가하였다.
해양 사용자를 위해 IMO에서 제시한, 미래의 위성항법시스템 을 활용한 시스템 및 서비스 측면에서의 항법 요구 성능은 Table 2와 같다(IMO, 2002). Table 2에서와 같이 항만 영역 별 로 엄격하게 요구 수준이 결정되어 있으며, 측위 정확도뿐만 아 니라 무결성, 연속성, 가용성 면에서도 보장을 요구하고 있다. 각 서비스 영역별로, 정확도는 2drms로 수평 정확도(Horizontal Accuracy)를 요구하고 있고, 무결성(Integrity)은 서비스 영역 내에서 사용자의 수평 정확도가 AL (Alert Limit)을 만족하지 못할 시에 TTA (Time-to Alarm) 시간 내로 알람을 공지하지 못할 확률이 3시간 당 IR (Integrity Risk) 범위 내로 만족하여 야 하며, 가용성(Availability)은 서비스 영역 내에서 30일 동안 에 DGPS 서비스가 가용한 시간이 요구하는 확률 이내로 유지 되어야 하고, 연속성(Continuity)은 3시간 동안 요구하는 확률 이내로 DGPS 서비스가 연속적으로 유지되어야 함을 의미한다.
Table 2
The parameters for current DGPS IM
아직은 IMO에서의 항법 요구 성능이 강제성을 띄고 있지 않 은 권고 수준에서 제시되고 있지만, 해양 관련 국제기구에서 무 결성에 대한 필요성은 갈수록 강하게 인식되고 있는 실정이다. 따라서 앞으로는 서비스 영역 별 항만 사용자에게 Table 2에 표시된 요구 기준을 만족하도록 DGPS 서비스를 제공할 필요 가 있다.
2.4 무결성 측면에서 현재 DGPS의 한계
초기에 DGPS 시스템의 개발배경은 GPS의 SA 오차로 인한 영향을 최소화하기 위한 입장에서 공통오차를 제거하여 개선된 측위 성능을 서비스하고자 하는 목적으로 접근한 것이기 때문 에, 최근에 IMO의 항만 사용자를 위해 요구되는 엄격한 항법 요구 성능을 기존 DGPS 구성 및 서비스만으로 모두 만족시키 기는 불충분하며 구조적인 한계가 분명히 존재한다. 지금까지 설명한 현재 DGPS 감시 기능의 취약점을 정리하면 Table 3과 같다. 크게 감시 시스템의 배치로 인한 한계, 원시 데이터의 감 시 기능 부재로 인한 한계, 사용자 측에서 활용할 수 있는 신뢰 도 척도 부족이 있다. 이와 같은 현재 DGPS 감시 기능의 취약 점은 엄격한 항법 요구 성능을 만족하도록 신뢰할 수 있는 항 법 서비스를 항만 사용자에게 제공하는 것에 한계로 작용한다.
Table 3
Minimum positioning performance requirements for maritime users of future GNSS systems
따라서 본 논문에서는 기존 DGPS 서비스는 유지하면서 국 내 주요 항만의 입출항로를 대상으로 DGPS 서비스의 감시 보장 공지 기능을 강화하여 HEA의 요구 성능을 만족하기 위 한 개선된 DGPS 서비스 감시 컨셉을 제안하고자 한다.
3. DGPS 감시 플랫폼
3.1 향상된 감시 기법의 컨셉
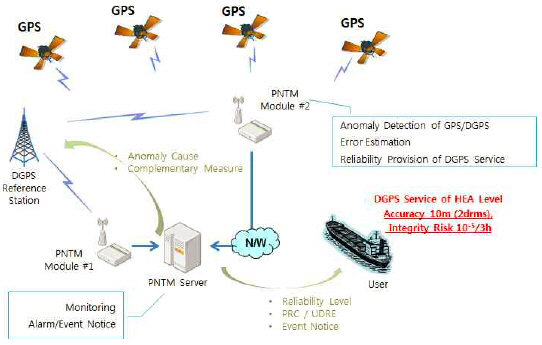
본 논문에서는 HEA의 요구 성능을 만족하는 DGPS 서비스를 제공하기 위하여 현재 DGPS 기준국의 취약점을 분석하고, 이 에 대한 대책을 강구하였으며, 이는 Table 4와 같다. Table 4 의 대책 요소를 반영하여 구상한 항만에서의 항법성능 감시 시스템의 활용 구상도는 Fig. 3과 같다. 그림에서와 같이 항만 내에서의 항법 성능을 감시하여 사용자에게 성능을 보장하며, 사용자에게 이벤트 발생 및 성능에 대한 공지 기능을 강화하 고, 기존 DGPS 기준국의 성능 보강 조건을 도출하고 추후에 는 보완할 수 있도록 분석할 수 있는 기능을 담았다. 항법성 능 감시 시스템은 크게 주요 항만에 설치할 항법성능 감시 모 듈과 각 항법성능 감시 모듈을 감시 및 관제할 통합 모니터링 시스템으로 구성된다. 항법성능 감시 모듈은 GPS 원시정보와 DGPS 보정 정보의 수신신호 품질을 감시하고 항만 내의 보 강 서비스에 대한 신뢰도를 측정하는 역할을 담당하며, 통합 모니터링 시스템은 각 항만에서의 DGPS 서비스 상태에 대해 감시하고, 이상 발생 시에 사용자에게 알람 정보를 제공하는 역할을 담당한다. 따라서 각 항만의 크기에 따라 항법성능 감 시 모듈은 다수 설치될 수 있으며, 통합 모니터링 시스템은 추 후 DGPS 제어국인 중앙사무소의 기능 보완 및 확장을 통해 통합 운용될 수 있다.
Table 4
The limitation factors of current DGPS service
3.2 신호 품질 감시 기능을 강화하기 위한 처리 알고리즘
DGPS의 신호 품질 감시 기능을 강화하기 위하여 분석한 DGPS 서비스의 무결성 결함 조건은 Fig. 4와 같다. RTCA(2004)를 기반으로 DGPS 감시 서비스에 적합하게 보완 하여 구성하였으며, 크게 정상 상태에서 측정치 품질이 좋지 않은 경우와 이상이 발생한 경우로 구분하였다. 정상 상태의 경우에는 일반적인 신뢰도 판단 척도 계산식(RTCA, 2004)에 서 DGPS에서 고려해야 하는 오차 요소를 반영하여 식 (1), 식 (2)에서와 같이 DGPS 사용자 측에서의 신뢰도 판단 척도 (PL_HD, PL_HDB)를 마련하여 측정치의 품질 상태를 감시하 였다. 이 때, SHorz는 거리 영역을 위치 영역으로 변환하기 위 한 투영행렬로서 (GTG)-1G이고, σUDRE 는 보정정보에 대한 품 질 판단 변수이며, PB는 실제 위치 대비 위치 영역에서의 바 이어스 성분으로 차분 보정 후 남은 이온층 지연 오차, 대류 권 지연 오차, 위성 궤도 오차의 잔여 성분을 포함한다.

이상 상태의 경우에는 결함 감시 종류를 세분화함으로써 요구 되는 신호 품질 감시 기능을 구체화하였다. 기존 DGPS의 감 시 기능이 기준국 또는 감시국에서 수집한 보정정보의 품질 감시에만 국한된 반면, 제안한 DGPS 감시 시스템 컨셉에서는 항법성능 감시 모듈에 GPS 원시정보의 품질 감시 기능을 추 가하고, 항만 내에서의 DGPS 보정정보의 품질 감시 기능을 수행함으로서 기존 대비 항만 사용자 영역에 대한 감시 기능 을 강화하였다. 항법성능 감시 시스템에서 DGPS 감시를 위해 수행하는 처리 알고리즘은 Fig. 5와 같다. 수신 신호 검사에서 는 공지사항 분석, GPS 및 DGPS의 수신 신호 품질 감시 (SQM), 공통 가시위성 체크 기능을 수행하고, 취득 원시정보 품질 검사에서는 GPS 측정치 품질 감시(MQM), GPS 데이터 품질 감시(DQM)를 수행하며, 항법 불능 조건 검사에서는 최 소 가용위성 수 및 DOP을 체크한다. 이 때, GPS 원시정보 품 질 검사를 위하여 기존 항공용 시스템인 LAAS 또는 WAAS 에서 활용하고 있는 품질 검사 기능 중의 일부를 해양용에 적 합하게 보완하여 도입하였으며, 적용한 기능은 Table 5와 같 다(Xie, 2004; Lee, 2005). RSIM 기능 검사에서는 기존 DGPS IM 기능 중에서 사용자 입장에서의 보정성능을 판단하기 위 한 주요 변수인 보정 후 의사거리 및 변화율 잔차 체크, 보정 후 측위 성능 체크를 수행한다. 보정 서비스 신뢰성 검사에서 는 DGPS 서비스의 무결성을 평가하기 위해 사용자 측의 판 단 척도로서 제안한 PL (Protection Level)을 계산하여 AL과 의 비교를 통해 신뢰도를 판단하며, 모니터링 및 공지 기능에 서는 감시 결과를 모니터링하고, 이상이 발생한 경우에는 통 신 채널을 통해 TTA 이내로 사용자에게 알람을 전달한다.
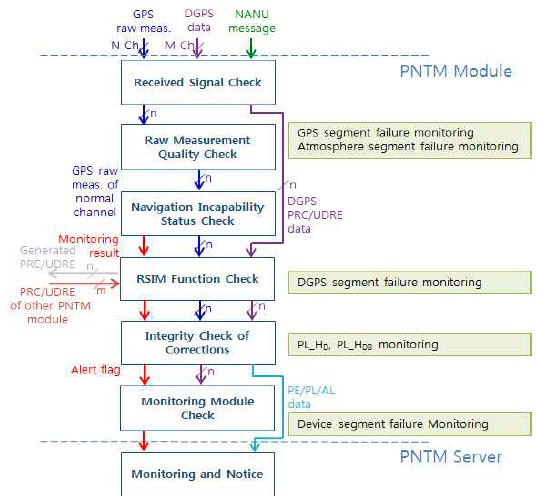
Table 5
Countermeasures about the limitation factors of current DGPS service
3.3 결과물
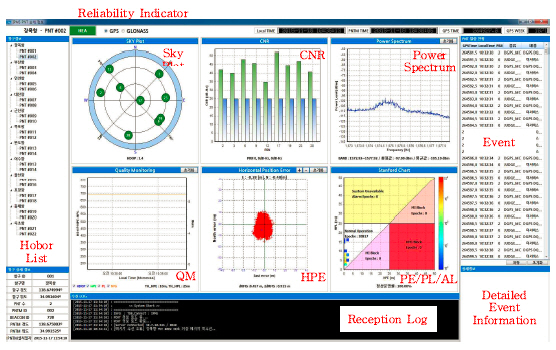
본 연구에서는 제안한 향상된 DGPS 감시 컨셉을 토대로 항 법성능 감시 시스템을 설계하고 남해 장목항을 사용자 영역으 로 지정하여 실험환경을 구성하였다. 이를 위하여 항법성능 감시 모듈을 남해 장목항 인근에 설치하고, 영도 DGPS 기준 국 신호를 수신 및 감시하였으며, 통합 모니터링 시스템을 두 어 Fig. 6과 같이 처리 결과를 상시 감시하였다. Fig. 6의 상시 감시 챠트에서 보이는 바와 같이 본 연구를 통해 기존 DGPS 의 IM 기능에 대비 취득원시 정보 품질 감시 기능이 추가되 고, 이외에도 각 결함 종류에 따라 세분화된 감시 기능이 추가 되었다. 또한 기존 DGPS에서는 고려하지 않았던 사용자 측의 신뢰도 판단 척도로서 활용할 수 있는 PL이 도출되었으며, IMO에서 제시하는 최대 허용 오차인 AL과의 비교를 통해 무 결성 성능을 판단할 수 있는 기틀을 마련하였다. 최종적으로 통합 모니터링 시스템에서는 대상 항만 유효범위 이내의 사용 자를 위해 항법성능 감시 모듈의 각 블록 별 처리 결과를 바 탕으로 양호/주의/위험/미서비스로 구분된 DGPS 서비스의 신뢰도 지표를 마련하였다.
4. 결 론
본 논문에서는 기존 DGPS 기준국의 감시 기능 강화의 필요 성을 보이고, 감시·보장·공지 기능을 개선하여 무결성 측면에 서 보강하기 위한 향상된 감시 컨셉을 제안하였다. 이를 위하 여 현재 DGPS 서비스 감시 기능의 취약점을 제시하고, 이에 대한 영향을 분석하였으며, 각 취약점 대비 해결안을 마련하 였다. 또한 마련된 해결안을 토대로 하여 향상된 감시 컨셉을 구상하고, 항법성능 감시 시스템을 설계하였으며, 결과물을 통 해 제안한 개념의 필요성 및 타당성을 보였다.
본 논문에서 제안하는 항법성능 감시 컨셉을 통해 추후에는 현재 DGPS 서비스의 한계를 개선하고, 감시, 보장, 공지 기능 을 강화하여 항만 사용자에게 HEA 요구 성능을 만족하는 신 뢰할 수 있는 항법 성능을 제공할 수 있는 환경이 마련될 수 있을 것으로 예상된다.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






