


1. Вёю вАа
1.1. ВЌ░Жхг в░░Ж▓й в░Ј вфЕВаЂ
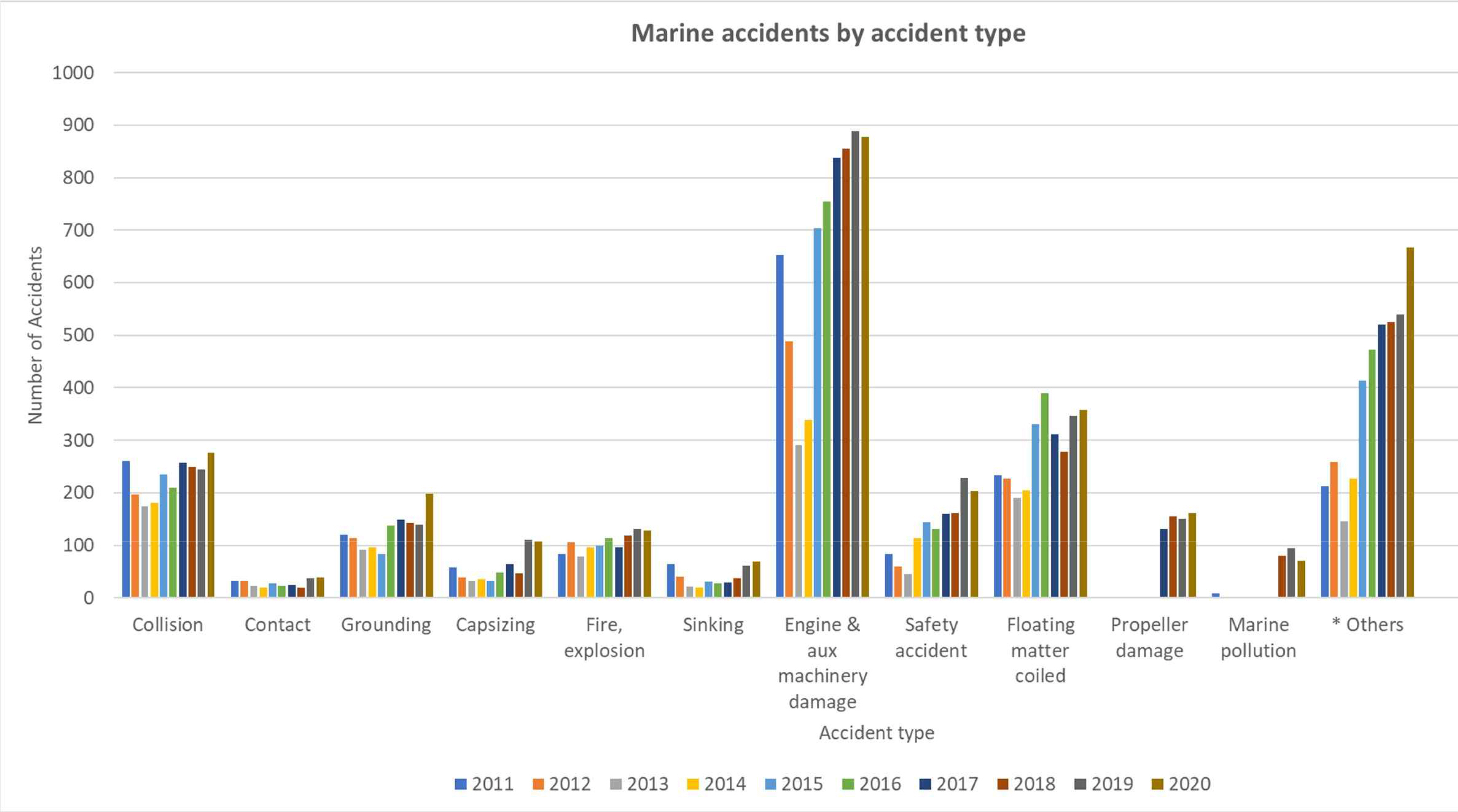
Ж│╝Ж▒░ВЌљ в╣ёьЋ┤ Вёав░ЋВЮў Вџ┤ьЋГ ьЎўЖ▓йВЮђ в╣авЦ┤Ж▓ї в│ђьЎћьЋўЖ│а ВъѕвІц(Kim and Jang, 2019, Korea Autonomous Surface Ship Project, 2023). ЖиИвЪгвѓў ЖИ░ВѕаВЮў в░юВаёВЌљвЈё вХѕЖхгьЋўЖ│а Fig. 1Ж│╝ Ж░ЎВЮ┤ Вёав░Ћ Ж░ё ВХЕвЈї ВѓгЖ│авіћ ВцёВДђ ВЋіЖ│а ВЌ░Ж░ё 200Ж▒┤ ВЮ┤ВЃЂ в░юВЃЮьЋўЖ│а ВъѕвІц(Korea Maritime Safety Tribunal, 2023). ВЮ┤віћ ВЌћВДё Ж│аВъЦ, вХђВюавг╝ВЌљ ВЮўьЋю Ж░љЖ╣ђ ВѓгЖ│аВЌљ ВЮ┤Вќ┤ 3в▓ѕВДИвАю вДјВЮђ Вёав░Ћ ВѓгЖ│аВЮ┤вІц. Вёав░Ћ ВХЕвЈї ВѓгЖ│аВЮў ВБ╝Вџћ ВЏљВЮИВю╝вАю ВЮИВаЂ ВџћВЮИВЮё вЊц Вѕў ВъѕвІц. ьЋГьЋ┤ВѓгВЮў ьїљвІе ВІцВѕўвѓў ЖИ┤ Вџ┤ьЋГ ВІюЖ░ёВю╝вАю ВЮИьЋю ьћ╝вАю в░Ј ВДЉВцЉваЦ ВађьЋўвАю ВЮИьЋю ВўцВъЉвЈЎ вЊ▒ВЮ┤ вгИВаюЖ░ђ вља Вѕў ВъѕвІц(Kim, 2017).
ВЮ┤вЦ╝ в░ЕВДђьЋўЖИ░ ВюёьЋ┤ ВъљВюеВџ┤ьЋГ ЖИ░ВѕаВЮ┤ в╣авЦ┤Ж▓ї в░юВаёьЋўЖ│а ВъѕвІц(Korea Autonomous Surface Ship Project, 2023). ВЮИЖ░ёВЮў Ж░юВъЁ ВЌєВЮ┤ ВЋѕВаёьЋю ьЋГьќЅВЮ┤ Ж░ђвіЦьЋўвЈёвАЮ ьЋўВЌг ВЮИВаЂ ВџћВЮИВю╝вАю ВЮИьЋю ВѓгЖ│а Ж░ђвіЦВё▒ВЮё ВцёВЮ╝ Вѕў ВъѕвІц. ВдЅ Вёав░Ћ ВБ╝в│ђ ВЃЂьЎЕВЮё ВаЋьЎЋьъѕ Ж░љВДђьЋўЖ│а ьЋ┤ВёЮьЋўВЌг ВѓгВаёВЌљ ВХЕвЈїВЮё ВўѕВИАьЋа Вѕў ВъѕвІц. ВўѕвЦ╝ вЊцВќ┤ Вёав░Ћ ВаЉВЋѕ ВІю вЮ╝ВЮ┤вЇћвЦ╝ ьЎюВџЕьЋўВЌг ВаЋьЎЋьЋю ВюёВ╣ў ВаЋв│┤ ВиевЊЮВЮ┤ Ж░ђвіЦьЋўвІц(Wang and Zhang, 2022).
Вёав░Ћ ВХЕвЈї в░ЕВДђвЦ╝ ВюёьЋ┤ ВЮИЖ│хВДђвіЦ в░Ј веИВІа вЪгвІЮВЮё ьЎюВџЕьЋўВЌг Вёав░Ћ Вџ┤ьЋГ вЇ░ВЮ┤ьё░вЦ╝ ВѕўВДЉ, вХёВёЮьЋўВЌг ьїеьё┤ВЮё ьїїВЋЁьЋўВЌг ВХЕвЈї ВюёьЌўВЮё ВўѕВИАьЋўвіћ ЖИ░ВѕаВЮё Ж░юв░юВцЉВЮ┤вІц(Chun, D. et al. 2021, Sun, Z. et al. 2023, Zhai, P. et al. 2022).
вўљьЋю ВъљВюеВџ┤ьЋГВёав░Ћ ЖИ░Вѕа ВцЉ Вёав░Ћ Ж░ё ьєхВІа в░Ј ьўЉваЦВЮђ вДцВџ░ ВцЉВџћьЋўвІц. ВЎювЃљьЋўвЕ┤ ВЃЂвїђ Вёав░ЋВЮў вІцВЮї ВюёВ╣ўвЦ╝ ВаЋьЎЋьъѕ ВЋїВДђ вф╗ьЋўЖ│а в│ИВёаВЮў ВўѕВИАвДїВю╝вАю ьћ╝ьЋГьЋа Ж▓йВџ░, ВХЕвЈї ВюёьЌўВЮ┤ ВА┤ВъгьЋўЖИ░ вЋївгИВЮ┤вІц. вћ░вЮ╝Вёю вЉљ Вёав░Ћ Ж░ё ВЃЂьўИЖ░ёВЮў ьћ╝ьЋГ ВЮўвЈёвЦ╝ вфЁьЎЋьъѕ ВЋїЖИ░ ВюёьЋю в░Ев▓ЋВЮ┤ ьЋёВџћьЋўвІц.
в│И ВЌ░ЖхгВЌљВёювіћ Вёав░Ћ Ж░ё ьєхВІа в░Ј ьўЉваЦВЌљ ЖИ░в░ўьЋю вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдўЖ│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдўВЮў ВъЉвЈЎ в░Ев▓Ћ в░Ј вЉљ ВЋїЖ│авдгВдўВЮў Вё▒віЦВЮё в╣ёЖхљ вХёВёЮьЋўЖ│аВъљ ьЋювІц.
1.2 ВЌ░Жхг в░Ев▓Ћ
в│И ВЌ░Жхгвіћ ВЏљьўЋ ЖИ░в░ў ВХЕвЈї ьћ╝ьЋГ ВІцьЌў ьЎўЖ▓йВЌљВёю Вёав░ЋВЮў В▓ЎВѕўвЦ╝ ВдЮЖ░ђВІюВ╝юЖ░ђвЕ░ вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдўЖ│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдўВЮў Вё▒віЦВЮё в╣ёЖхљ вХёВёЮьЋўвіћвЇ░ вфЕВаЂВЮ┤ ВъѕвІц. вфевЊа Вёав░ЋВЮђ ВЏљВЮё ВцЉВІгВю╝вАю Ж░ЎВЮђ Ж▒░вдгВЮў Ж░ђВъЦВъљвдгВЌљВёю ВХюв░юьЋўВЌг ВЏљВЮў ВцЉВІгВЮё ВДђвѓў в░ўвїђьјИ вфЕВаЂВДђвЦ╝ ьќЦьЋўвЈёвАЮ ВёцВаЋьЋўВўђвІц. ВЏљьўЋ ЖИ░в░ў ВХЕвЈї ьћ╝ьЋГ вфевЇИВЮё ВёаВаЋьЋю ВЮ┤Вюавіћ вІцВЮїЖ│╝ Ж░ЎвІц.
- Вёав░Ћ Ж░ё ВЃЂвїђВаЂ ВюёВ╣ў Ж┤ђЖ│ёЖ░ђ вЈЎВЮ╝ьЋўвІц. ВдЅ ьі╣ВаЋ Вёав░ЋВЮ┤ ьі╣ВѕўьЋю ьЎўЖ▓йВЌљ В▓ўьЋўВДђ ВЋівЈёвАЮ ьЋўВЌг вфевЊа Вёав░ЋВЮ┤ вЈЎВЮ╝ьЋю ВА░Ж▒┤ВЌљВёю ВІцьЌў ВѕўьќЅВЮ┤ Ж░ђвіЦьЋўвІц.
- Ж░Ђ Вёав░ЋВЮђ ВЏљВЮў ВцЉВІгВЮё ВДђвѓў в░ўвїђьјИВЌљ вфЕВаЂВДђвЦ╝ ВёцВаЋьЋўвЈёвАЮ ьЋўВўђвІц. ВдЅ вфевЊа Вёав░ЋВЮ┤ ВЏљВЮў ВцЉВЋЎВЌљВёю ВА░Вџ░ьЋўвЈёвАЮ ьЋўВЌг Ж░ђВъЦ в│хВъАьЋю ВЃЂьЎЕ ВъгьўёВЮ┤ Ж░ђвіЦьЋўвЈёвАЮ ьЋўВўђвІц.
вЉљ ВЋїЖ│авдгВдўВЮў Ж│ёВѓ░ ВєїВџћ ВІюЖ░ё, ьЋГьќЅ Ж▒░вдг, вЕћВІюВДђ ЖхљьЎў ьџЪВѕўвЦ╝ в╣ёЖхљ в░Ј вХёВёЮьЋўВўђвІц. ВЌ░ЖхгВЮў ВѕюВёювіћ вІцВЮїЖ│╝ Ж░ЎвІц. 2ВъЦВЌљВёювіћ вХёВѓ░ ВЋїЖ│авдгВдўВЮё ВєїЖ░юьЋювІц. 3ВъЦВЌљВёювіћ вЉљ ВЋїЖ│авдгВдўВЮё ВІюв«гваѕВЮ┤ВЁўВЮё ьєхьЋ┤ Вё▒віЦВЮё в╣ёЖхљ, вХёВёЮьЋювІц.
1.3 ВёаьќЅ ВЌ░Жхг
Вёав░Ћ ВХЕвЈї ьћ╝ьЋГВЮё ВюёьЋю ВцЉВЋЎВДЉВцЉВІЮВЮў Ж▓йВџ░, вїђьЉюВаЂВю╝вАю Вёав░ЋЖхљьєхЖ┤ђВаюВѓг(VTSO, Vessel Traffic Service Operator)Ж░ђ Вёав░ЋВЮў ьЋГьќЅ Ж▓йвАювЦ╝ ьєхВаюьЋўвіћ в░Ев▓ЋВЮ┤ ВъѕвІц. Lee and Song(2017)ВЮђ Вёав░Ћ ВХЕвЈї ВюёьЌўвЈёвЦ╝ Вѓ░ВХюьЋўЖИ░ ВюёьЋ┤ VTS Ж┤ђВаљВЌљВёю Вёав░Ћ ВА░Вџ░ ВЃЂьЎЕВЌљ вћ░вЦИ ВюёьЌў, Жи╝ВаЉ Ж▒░вдг, VTSOВЮў ВюёьЌў ьЃювЈёвЦ╝ в░ўВўЂьЋўВўђвІц. Pak, C. et al.(2014)віћ VTS ВцЉВІгВЮў Вёав░Ћ Ж░ё Ж▓йвАю ЖхљьЎўВЮё ВюёьЋю в░Ев▓ЋВЮё ВаюВЋѕьЋўВўђвІц. Lee and Song(2018a)ВЮђ Вёав░Ћ Ж░ё ВХЕвЈї ВюёьЌў ВЃЂьЎЕВЌљВёю ьЋ┤ВЃЂ Жхљьєх Ж┤ђВаюВѓгВЮў ВЃЂьЎЕ ВЮИВІЮВЌљ вћ░вЦИ ВюёьЌў ьЃювЈёвЦ╝ вХёВёЮьЋўВўђвІц. Lee and Song(2018b)віћ ВаЋв░ЋВёа Ж░ё ВаЂВаЋьЋю ВўЂВЌГ Ж░љВІювЦ╝ Ж▓░ВаЋьЋўЖИ░ ВюёьЋ┤ в░Ев▓ЋВЮё ВаюВЋѕьЋўВўђвІц. Oh, J. et al.(2018)віћ AIS вЇ░ВЮ┤ьё░вЦ╝ ьЎюВџЕьЋўВЌг ьєхьЋГ ьїеьё┤ ьЋЎВіх в░Ј ьЋЎВіхвљю вфевЇИЖ│╝ ВІцВаю вЇ░ВЮ┤ьё░ВЮў в╣ёЖхљвЦ╝ ьєхьЋ┤ ВЮ┤ВЃЂВ╣ўвЦ╝ Ж│ёВѓ░ьЋўВЌг ВЮ┤ВЃЂ Ж▒░вЈЎ Вёав░ЋВЮё ьїљв│ёьЋўВўђвІц. ЖиИвЪгвѓў ВюёВЎђ Ж░ЎВЮђ в░Ев▓ЋВЮђ вфевЊа ВаЋв│┤Ж░ђ ьі╣ВаЋ ЖиИвБ╣ВЌљ ВДЉВцЉвљўВќ┤ ВъѕВю╝вЕ░ ьЋ┤вІ╣ ЖиИвБ╣ВЌљ вгИВаюЖ░ђ в░юВЃЮ вља Ж▓йВџ░, ВаЋВЃЂВаЂВю╝вАю ВъЉвЈЎьЋўВДђ вф╗ьЋа Ж░ђвіЦВё▒ВЮ┤ ВъѕвІц.
ВЮ┤ВЌљ в░ўьЋ┤ вІцВѕў Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЮё ьєхьЋю в░Ев▓ЋВЮ┤ ВаюВЋѕвљўЖ│а ВъѕвІц. Liu, Y. et al.(2007)віћ Вёав░Ћ ВХЕвЈї ьџїьћ╝ ВЮўВѓгЖ▓░ВаЋ ВЌ░ЖхгвЦ╝ ВюёьЋю вІцВцЉ ВЌљВЮ┤ВаёьіИ ЖИ░в░ў ВІюв«гваѕВЮ┤ВЁў ВІюВіцьЁюВЮё ВаюВЋѕьЋўВўђвІц. 4Ж░ђВДђВЮў ВЌљВЮ┤ВаёьіИ вфевЇИ(Control_Agent, Union_Agent, Ship_Agent в░Ј VTS_Agent)ВЮё ьЎюВџЕьЋўВЌг ВЮИЖ░ё, Вёав░Ћ в░Ј VTS ВЮў ьќЅвЈЎВЮё вфевЇИвДЂьЋўЖИ░ ВюёьЋ┤ Ж░ЂЖ░ЂВЮў ВЌљВЮ┤ВаёьіИ ьћёваѕВъёВЏїьЂгвЦ╝ ВѓгВџЕьЋўВЌг вфевЇИВЮё Ж░юв░юьЋўВўђвІц. ВаюВЋѕвљю вІцВцЉ ВЌљВЮ┤ВаёьіИ ЖИ░в░ў ВІюв«гваѕВЮ┤ВЁў ВІюВіцьЁюВЮђ ВХЕвЈї в░ЕВДђвЦ╝ ВюёьЋю вІцВцЉ вїђВЃЂ в░юВЃЮ вгИВаю в░Ј вІцВќЉьЋю ВЮўВѓг Ж▓░ВаЋ в░Ев▓ЋВЮё ВаюЖ│хьЋа Вѕў ВъѕвІц. ЖиИвЪгвѓў в│хВъАьЋю ВЃЂьЎЕВЌљВёюВЮў Вё▒віЦ вХёВёЮ в░Ев▓ЋВЌљ вїђьЋю ВќИЖИЅВЮ┤ ВЌєвІц. Hornauer and Hahn(2013)віћ ВбЂВЮђ ВѕўвАюВЎђ вёЊВЮђ в░ћвІцВЌљВёю ВІавб░ьЋа Вѕў Въѕвіћ ВХЕвЈї в░ЕВДђвЦ╝ ВаюЖ│хьЋўЖИ░ ВюёьЋ┤ AISВЌљ ЖИ░в░ўьЋўВЌг Ж░Ђ Вёав░ЋВЮ┤ ьўЉВЃЂВЌљ В░ИВЌгьЋўВЌг ВБ╝Вќ┤ВДё ВаюВЋй вѓ┤ВЌљВёю Ж░Ђ Вёав░ЋВЮђ ВхюВаЂВЮў ьћ╝ьЋГ Ж▓йвАювЦ╝ В░ЙЖИ░ ВюёьЋ┤ вЁИваЦьЋювІц. ЖиИвЪгвѓў AISЖ░ђ ВЌєвіћ Вёав░ЋВЮў Ж▓йВџ░, ВЮ┤вЪгьЋю в░Ев▓ЋВЮў ВаЂВџЕВЮ┤ ьъўвЊцвІцвіћ вІеВаљВЮ┤ ВъѕвІц. Ferranti(2018)віћ в╣ёВёаьўЋвфевЇИ ВўѕВИА ВаюВќ┤вЦ╝ ЖИ░в░ўВю╝вАю вІцВцЉ Ж░ЮВ▓┤ ЖХцвЈё Ж│ёьџЇ в░Ј ВА░ВаЋ в░Ев▓ЋВЮё ВаюВЋѕьЋўВўђвІц. Ж░Ђ Ж░ЮВ▓┤віћ ВЮ┤ВЏЃ Ж░ЮВ▓┤ВЎђ ВаЋв│┤ ЖхљьЎўВЮё ьєхьЋ┤ ВхюВаЂВЮў ьћ╝ьЋГ Ж▓йвАювЦ╝ ьЃљВЃЅьЋа Вѕў ВъѕвІц. ЖиИвЪгвѓў Ж│ёВѓ░ьЋўЖИ░ ВюёьЋ┤ ВЮ╝ВаЋ ВІюЖ░ё ВаЋВДђьЋ┤ВЋ╝ ьЋювІцвіћ вІеВаљВЮ┤ ВА┤ВъгьЋювІц. Yang(2020)віћ вёцьіИВЏїьЂгвЦ╝ ьЋЎВіхВІюВ╝ю Вёав░ЋВЮў ВЏђВДЂВъёВЮё Ж│авацьЋю ьўЉваЦ ВХЕвЈї в░ЕВДђ вЕћВ╗цвІѕВдўВЮё ВаюВЋѕьЋўВўђвІц. Вёав░ЋВЮў вЈЎВаЂ ВаЋв│┤вЦ╝ ьЋЎВіхьЋўВЌг ВЋѕВаёьЋю ВЃЂьЃювЦ╝ ВўѕВИАьЋа Вѕў Въѕвіћ AI ЖИ░в░ў Вёав░Ћ вёцьіИВЏїьЂг ВЏђВДЂВъё вфевЇИВЮё ВёцЖ│ёьЋўВўђвІц. ВІюв«гваѕВЮ┤ВЁў Ж▓░Ж│╝ ВаюВЋѕвљю ВаЉЖи╝ в░ЕВІЮВЮ┤ ВюаВаёВъљ ВЋїЖ│авдгВдўВЮў ВЋѕВаЋВё▒ВЮё ьќЦВЃЂВІюьѓцЖ│а ьўЉваЦВаЂ ВХЕвЈї ьџїьћ╝вЦ╝ ВюёьЋю ВхюВаЂВЮў ВЋѕВаё Ж▓йвАю Ж│ёьџЇВЮё вІгВё▒ьЋа Вѕў ВъѕВЮїВЮё в│┤ВЌгВБ╝ВЌѕвІц. ЖиИвЪгвѓў Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЮё ВюёьЋ┤ ВаюВЋѕвљю в░Ев▓ЋвЊцВЮђ ВІцВаю Вёав░ЋВЌљ ВаЂВџЕьЋўЖИ░ ВюёьЋю Вё▒віЦВЌљ вїђьЋю ВќИЖИЅВЮ┤ вХђВА▒ьЋю ВІцВаЋВЮ┤вІц.
Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЌљ вїђьЋю ВЋїЖ│авдгВдўВЌљ вїђьЋю в╣ёЖхљ вХёВёЮВЮђ вХђВА▒ьЋю ВІцВаЋВЮ┤вІц. вћ░вЮ╝Вёю в│И ВЌ░ЖхгВЌљВёювіћ Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЌљ ЖИ░в░ўьЋю вХёВѓ░ ВЋїЖ│авдгВдўВЮў Вё▒віЦ ВІцьЌўВЮё ьєхьЋ┤ Вёав░Ћ В▓ЎВѕў в│ђьЎћВЌљ вћ░вЦИ Вё▒віЦВЮё в╣ёЖхљ вХёВёЮьЋўЖ│аВъљ ьЋювІц.
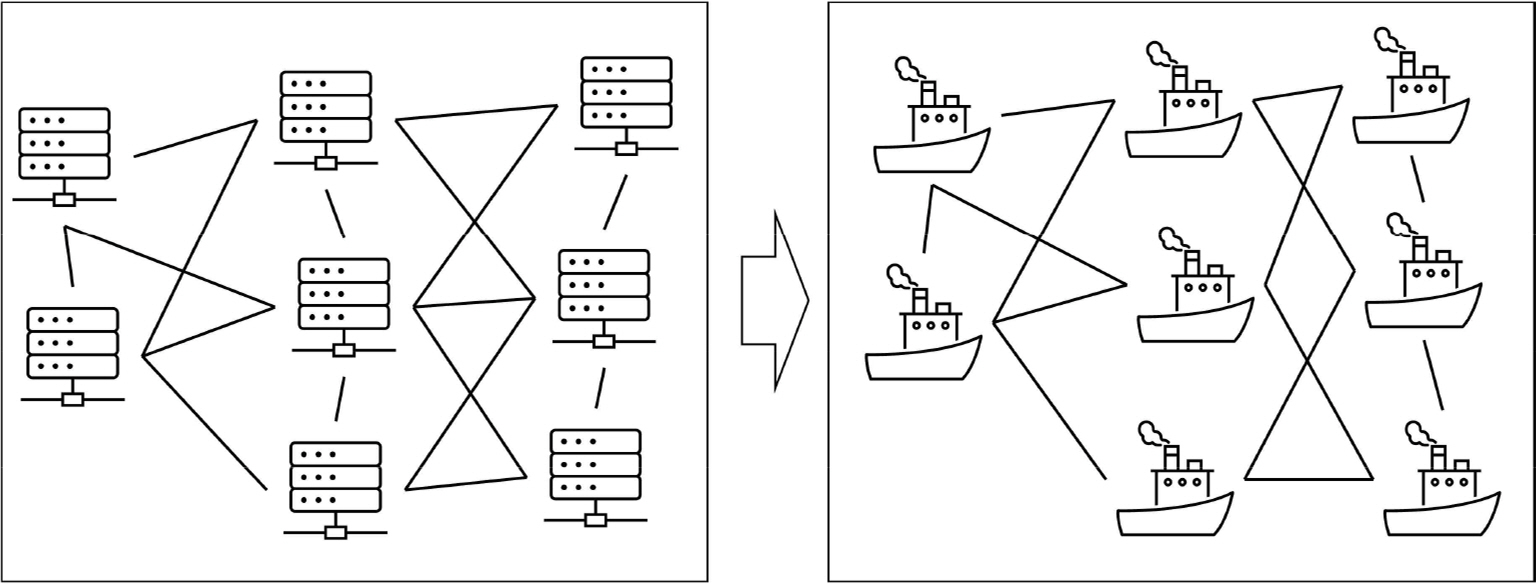
2. вХёВѓ░ ВЋїЖ│авдгВдў
Fig. 2ВЎђ Ж░ЎВЮ┤ вХёВѓ░ ВЋїЖ│авдгВдўВЮђ ВЃЂьўИ ВЌ░Ж▓░вљю ьћёвАюВёИВёювАю ЖхгВё▒вљю ьЋўвЊюВЏеВќ┤ВЌљВёю ВІцьќЅвљўвЈёвАЮ ВёцЖ│ёвљю ВЋїЖ│авдгВдўВЮё ВЮўв»ИьЋювІц. ВўѕвЦ╝ вЊцВќ┤ вХёВѓ░ ВаЋв│┤ В▓ўвдг, ВІцВІюЖ░ё ьћёвАюВёИВёю ВаюВќ┤ВЎђ Ж░ЎВЮђ вХёВЋ╝ВЌљВёю ВѓгВџЕвљўЖ│а ВъѕвІц. вХёВѓ░ ВЋїЖ│авдгВдўВЮё Вёав░Ћ ВХЕвЈї вХёВЋ╝ВЌљ ВаЂВџЕьЋю вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдўЖ│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдўВЮў Вё▒віЦВЮё в╣ёЖхљ, вХёВёЮьЋўЖ│аВъљ ьЋювІц. ве╝Вађ в│И ВъЦВЌљВёювіћ вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдў(Kim, et al., 2015)Ж│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдў(Kim, et al., 2017)ВЌљВёю ВѓгВџЕвљўвіћ ВџЕВќ┤ВЌљ вїђьЋ┤ ВёцвфЁьЋўЖ│аВъљ ьЋювІц.
2.1 ВџЕВќ┤ в░Ј ВаЋВЮў
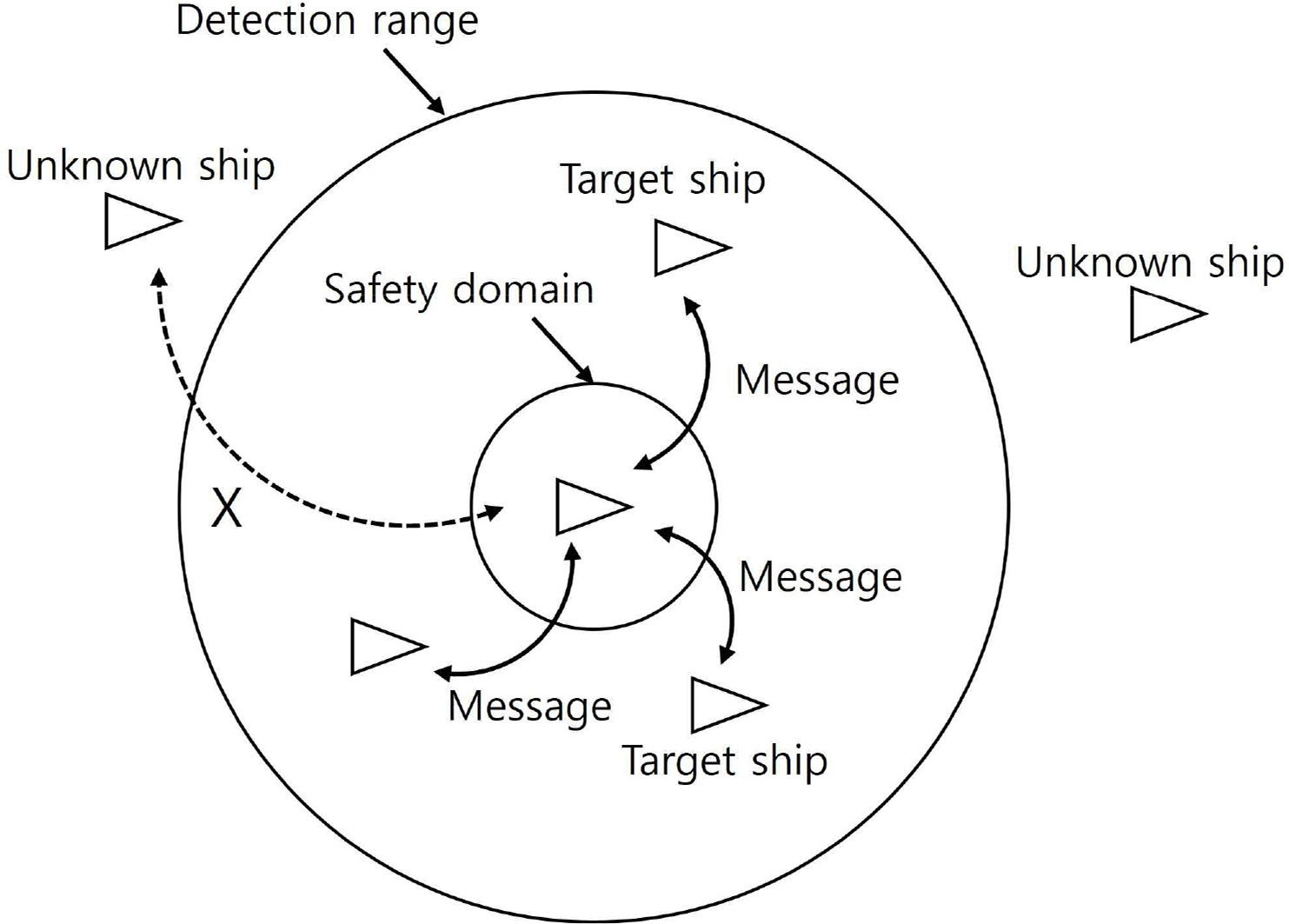
Fig. 3Ж│╝ Ж░ЎВЮ┤ ВЏљВЮў ВцЉВЋЎВЌљ ВюёВ╣ўьЋю Вѓ╝Ж░ЂьўЋВЮђ в│ИВёаВЮё ВЮўв»ИьЋювІц. вІцВќЉьЋю вфеьўЋВЮў safety domainВЮ┤ ВаюВЋѕвљўЖ│а ВъѕВю╝вЕ░(Szlapczynski, R. and Szlapczynska, J. 2017) в│ИВёаВЮђ ВЏљьўЋВЮў safety domainВЮё Ж░ђВДёвІц. ВІюв«гваѕВЮ┤ВЁў ЖхгьўёВЮ┤ ВџЕВЮ┤ьЋўЖИ░ вЋївгИВЌљ ВЏљьўЋ ЖИ░в░ў safety domainВЮё ВёаВаЋьЋўВўђвІц. ВЮ┤ safety domain ВўЂВЌГ ВЮ┤вѓ┤ВЌљ ВЃЂвїђ Вёав░ЋВЮ┤ В╣ев▓ћьЋўВўђВЮё Ж▓йВџ░, ВХЕвЈївАю Ж░ёВБ╝ьЋювІц. Ж░ђВъЦ в░ћЖ╣ЦВЮў ВЏљВЮђ detection rangeвАю ВЃЂвїђ Вёав░ЋЖ│╝ ВаЋв│┤ ЖхљьЎўВЮ┤ Ж░ђвіЦьЋю ВўЂВЌГВЮё ВЮўв»ИьЋювІц. ВЮ┤ detection range вѓ┤ВЮў Вёав░ЋЖ│╝віћ вЕћВІюВДђ ЖхљьЎўВЮ┤ Ж░ђвіЦьЋўвЕ░ ВЮ┤ ВўЂВЌГ в░ћЖ╣ЦВЮў Вёав░ЋЖ│╝віћ вЕћВІюВДђ ЖхљьЎўВЮ┤ вХѕЖ░ђвіЦьЋўвІц. Table 1ВЮђ Ж░Ђ ВџЕВќ┤ВЌљ вїђьЋю ВёцвфЁВЮ┤вІц.
2.2 вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдў(Distributed Local Search Algorithm, DLSA)
DLSA(Kim D. 2015)віћ вІцВЮї ВаѕВ░еВЎђ Ж░ЎВЮ┤ ВъЉвЈЎвљювІц.
Repeat the following procedures until no collision risk
Step 1: Each ship sends its current information to neighbors via ok? messages.
Step 2: Each ship sends possible improvement in collision risk to neighbors via improve messages.
Step 3: The ships with larger improvement than neighbors change their direction (ties are broken by the ship priorities).
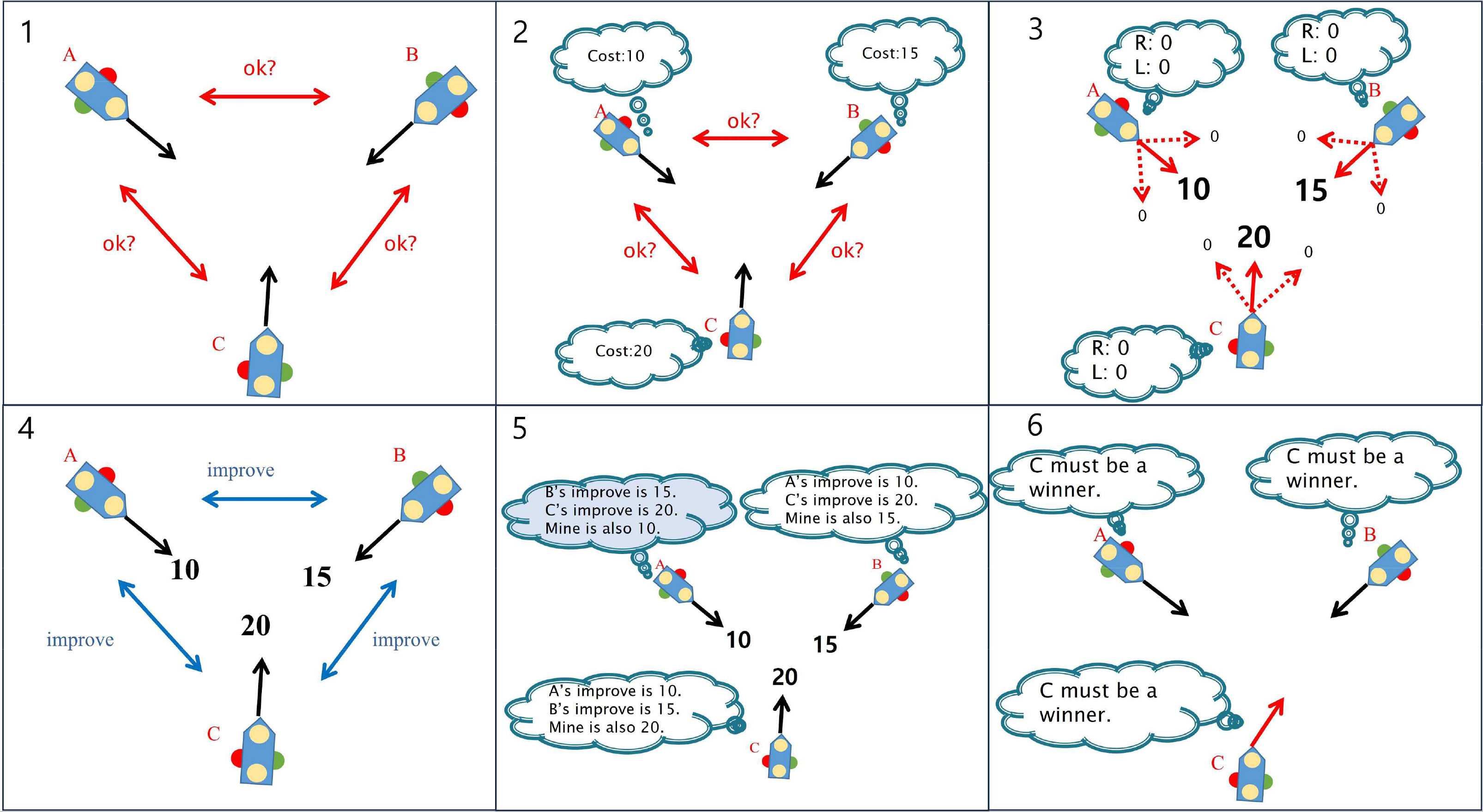
ВдЅ, Ж░Ђ Вёав░ЋВЮђ ВЃЂвїђ Вёав░ЋЖ│╝ ВаЋв│┤вЦ╝ ЖхљьЎў ьЏё в╣ёВџЕВЮё Ж░ђВъЦ вДјВЮ┤ ВцёВЮ╝ Вѕў Въѕвіћ в░Ев▓ЋВЮё вфеВЃЅ ьЏё Ж░ђВъЦ ьЂгЖ▓ї в╣ёВџЕВЮё ВцёВЮ┤віћ Вёав░ЋВЮ┤ вІцВЮї ьћ╝ьЋГ ВйћВіцвЦ╝ ВёаьЃЮьЋа Вѕў Въѕвіћ Вџ░ВёаЖХїВЮё Ж░ђВДёвІц. ВЮ┤вЪгьЋю Ж│╝ВаЋВЮё вфЕВаЂВДђВЌљ вЈёВ░ЕьЋа вЋїЖ╣їВДђ в░ўв│хьЋювІц. ВЌгЖИ░Вёю в╣ёВџЕВЮ┤въђ ВЃЂвїђ Вёав░ЋЖ│╝ВЮў ВХЕвЈїВЮё ьћ╝ьЋўЖИ░ ВюёьЋ┤ в░юВЃЮвљўвіћ Ж▒░вдгВЎђ ВюёьЌўвЈёВЮў ВдЮЖ░ђвЦ╝ ВЮўв»ИьЋювІц(ВІЮ 2 В░ИВА░)
вЇћ ВъљВёИьъѕ ВёцвфЁьЋўвЕ┤ Fig. 4ВЎђ Ж░ЎВЮ┤ Ж░Ђ Вёав░ЋВЮђ detection range ВЮ┤вѓ┤ВЮў ВЃЂвїђ Вёав░ЋЖ│╝ ВаЋв│┤ ЖхљьЎўВЮё ВІцВІюьЋювІц. ВЮ┤ вЋї ok? messageвЦ╝ ЖхљьЎўьЋювІц(1). ВЮ┤вЦ╝ ЖИ░в░ўВю╝вАю Ж░Ђ Вёав░ЋВЮђ ьўёВъг ВйћВіцВЮў в╣ёВџЕВЮё Ж│ёВѓ░ьЋювІц(2). ьўёВъг ВЃЂьЃюВЌљВёю Ж░ђВъЦ ьЂгЖ▓ї в╣ёВџЕВЮё вѓ«ВХю Вѕў Въѕвіћ ВйћВіцВЎђВЮў В░еВЮ┤(improvement)вЦ╝ Ж│ёВѓ░ьЋювІц(3). ВЮ┤ьЏё ВЮ┤ improvementвЦ╝ ЖхљьЎўьЋювІц(4). Ж░Ђ Вёав░ЋВЮђ ВЃЂвїђ Вёав░ЋВЮў improvementВЎђ в│ИВёаВЮў improvementвЦ╝ в╣ёЖхљ(5)ьЋўВЌг Ж░ђВъЦ ьЂ░ Вёав░ЋВЮ┤ вІцВЮї ВюёВ╣ўвЦ╝ в│ђЖ▓йьЋа Вѕў Въѕвіћ Вџ░ВёаЖХїВЮё Ж░ђВДёвІц(6).
2.3 вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдў(Distributed Stochastics Search Algorithm, DSSA)
DLSAВЌљВёювіћ вІцВЮї ВюёВ╣ўвЦ╝ Ж▓░ВаЋьЋўвіћвЇ░ ВъѕВќ┤Вёю Ж░ђВъЦ ьЂгЖ▓ї в╣ёВџЕВЮё Ж░љВєї ВІюьѓг Вѕў Въѕвіћ Вёав░ЋВЮ┤ вІцВЮї ВюёВ╣ўвЦ╝ Ж▓░ВаЋьЋўвЈёвАЮ ьЋўВўђвІц. ВЮ┤віћ вфевЊа Вёав░ЋВЮ┤ вЈЎВІюВЌљ вІцВЮї ьћ╝ьЋГ Ж▓йвАювЦ╝ Ж▓░ВаЋьЋа Ж▓йВџ░, ЖИ░ВА┤ВЮў ВЃЂвїђ Вёав░ЋВЌљ вїђьЋю ВаЋв│┤ВЎђ ьўёВъг ВЃЂвїђ Вёав░ЋВЮў ВаЋв│┤Ж░ђ вІгвЮ╝ВДђЖ▓ї вљўВќ┤ вІцВІю ВХЕвЈїВЮ┤ в░юВЃЮьЋа Ж░ђвіЦВё▒ВЮ┤ вєњвІц. DSSAвіћ DLSAВЎђ Ж░ЎВЮ┤ ьЋГВЃЂ ВхюВаЂВЮў ьћ╝ьЋГ Ж▓йвАювЦ╝ ьЃљВЃЅьЋўвіћ Ж▓ЃВЮђ вЈЎВЮ╝ьЋўВДђвДї вЈЎВІюВЌљ ВЮ╝ВаЋ ьЎЋвЦавАю ВхюВаЂВЮ┤ ВЋёвІї ьћ╝ьЋГ Ж▓йвАювЦ╝ ВёаьЃЮьЋа Вѕў ВъѕвЈёвАЮ ьЋўВўђвІц.
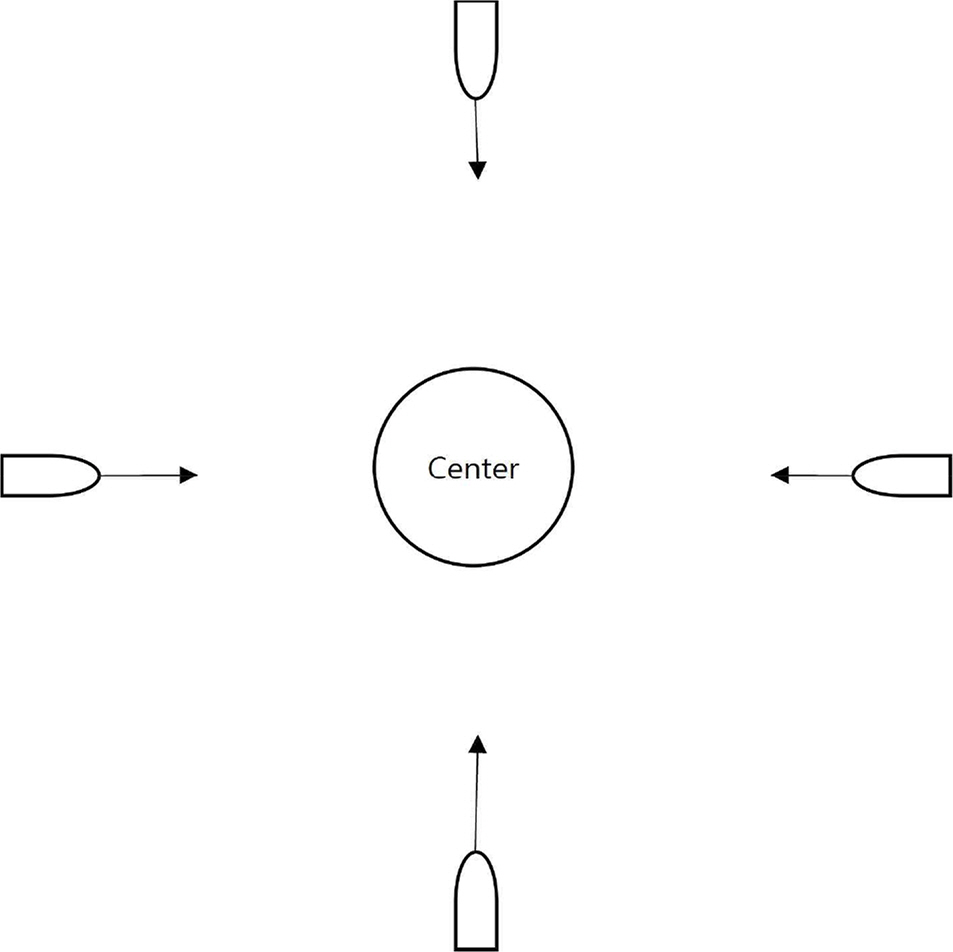
Table 2віћ ВІцьЌўВЌљ ВѓгВџЕвљю ьїївЮ╝вЕћьё░ВЌљ ВёцВаЋВЮё ВЮўв»ИьЋювІц. Вёав░Ћ В▓ЎВѕўВЮў Ж▓йВџ░, 2В▓ЎВЮђ ВХЕвЈї ьћ╝ьЋГВЮ┤ Ж░ђвіЦьЋю ВхюВєї В▓ЎВѕў ВЮ┤вЕ░ 50ВЮђ В╗┤ьЊеьё░ Вё▒віЦВЮё Ж│авацьЋю Вхювїђ В▓ЎВѕўВЮ┤вІц. Detection rangeвіћ Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЮ┤ Ж░ђвіЦьЋю Ж▒░вдгвЦ╝ ВЮўв»ИьЋювІц. 12 nmsвАю ВёцВаЋьЋю ВЮ┤Вюавіћ ВІцВаю ьЋГьќЅВІю ваѕВЮ┤вЇћВЮў ваѕВЮИВДђвЦ╝ В░ИЖ│аьЋўВЌг ВёцВаЋьЋўВўђвІц. Safety domainВЮђ Вёав░ЋВЮў ВЋѕВаё ВўЂВЌГВю╝вАю ВЮ┤ ВўЂВЌГ ВЮ┤вѓ┤ВЌљ ВЃЂвїђ Вёав░ЋВЮ┤ вЊцВќ┤ВўцВДђ вф╗ьЋўвЈёвАЮ ьЋювІц. Park, et al.(2010)ВЮђ Ваёв░Е ВА░Вџ░ВІю ВЮ┤Ж▓Е Ж▒░вдгвЦ╝ 4.4LвАю ВаюВЋѕьЋўВўђвІц. в│И ВЌ░ЖхгВЌљВёювіћ Вёав░ЋВЮё ВаљВю╝вАю Ж░ђВаЋьЋўВЌг ВІцьЌўВЮё ВДёьќЅьЋўВўђВю╝вЕ░ 400m Вёав░ЋВЮў Ж▓йВџ░, ВЋй 1 nm ВаЋвЈёВЮў ВЮ┤Ж▓Е Ж▒░вдгЖ░ђ ьЋёВџћьЋўвіћ ВаљВЮё Ж│авацьЋўВЌг safety domainВЮё 1nmвАю ВёцВаЋьЋўВўђвІц. SpeedВЮў Ж▓йВџ░ в│И ВЌ░ЖхгВЌљВёювіћ в▓їьЂгВёаВю╝вАю Ж░ђВаЋьЋўВЌг ВІцьЌўВЮё ВДёьќЅьЋўВўђвІц. Radius of circleВЮё 50 nmsвАю ВёцВаЋьЋю ВЮ┤Вюавіћ вфевЊа Вёав░ЋВЮ┤ В┤ѕЖИ░ВЌљ ВХЕвХёьЋю Ж│хЖ░ёВЮё Ж░ђВДђЖ▓ї ьЋўЖИ░ ВюёьЋ┤ ВёцВаЋьЋўВўђвІц.
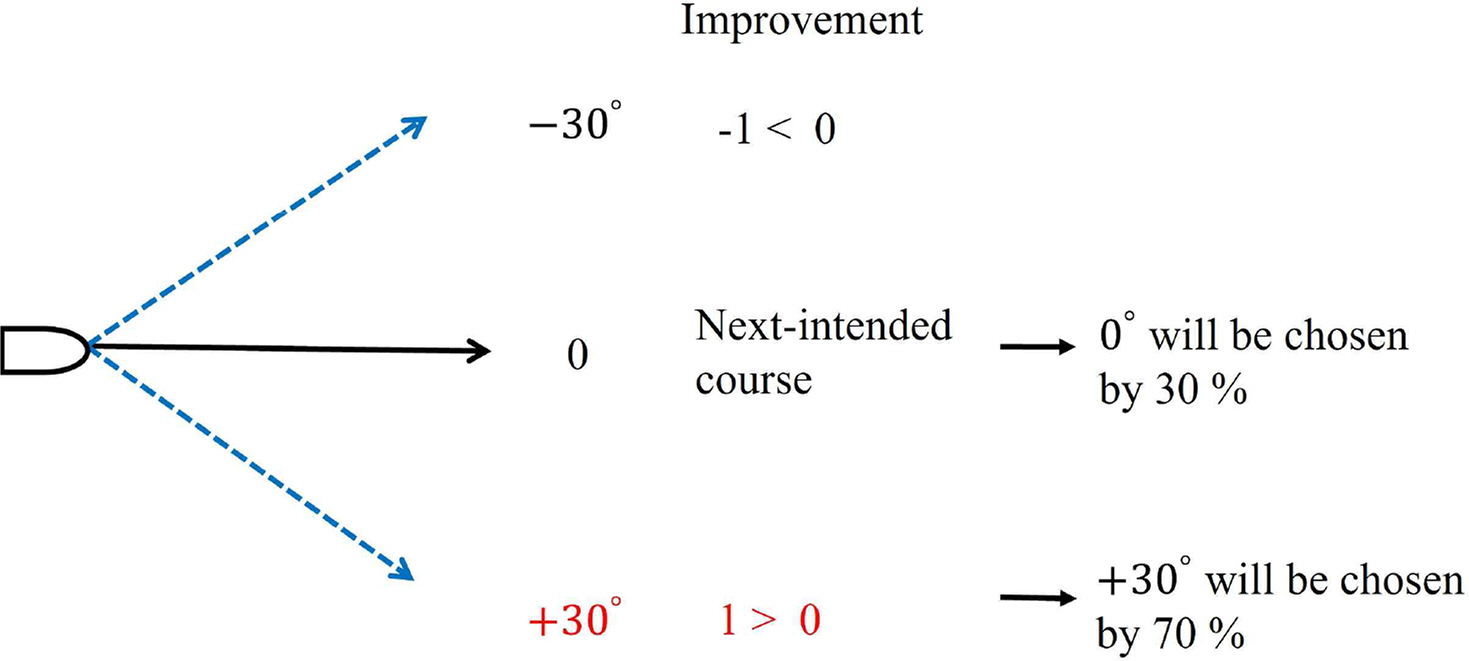
Fig. 5віћ DSSA(Kim, 2017)ВЌљ ВЮўьЋю ьћ╝ьЋГ в░Ев▓ЋВЮё ВЮўв»ИьЋювІц. ве╝Вађ Ж░Ђ Вёав░ЋВЮђ ВЃЂвїђ Вёав░ЋЖ│╝ ok? messageвЦ╝ ЖхљьЎўьЋювІц. ВЮ┤ьЏё Ж░Ђ Вёав░ЋВЮђ ьўёВъг ВЃЂьЃюВЮў ВхюВаЂ ьћ╝ьЋГ Ж▓йвАювЦ╝ ВЮ╝ВаЋ ьЎЋвЦа pвДїьЂ╝ ВёаьЃЮьЋўвЈёвАЮ ьЋўВўђВю╝вЕ░ ВЮ╝ВаЋ ьЎЋвЦа 1-pвДїьЂ╝ вІцвЦИ ВйћВіцвЦ╝ ВёаьЃЮьЋа Вѕў ВъѕвЈёвАЮ ьЋўВўђвІц. ВЮ┤вЋї ьЎЋвЦа pвіћ Fig. 6Ж│╝ Ж░ЎВЮ┤ Ж▓░ВаЋвљювІц. Fig. 6ВЮђ ВЮ┤ьЋ┤вЦ╝ ВюёьЋ┤ Вёав░ЋВЮ┤ ВёаьЃЮьЋа Вѕў Въѕвіћ ВйћВіцвЦ╝ вІеВѕюьЎћьЋю ЖиИвд╝Вю╝вАю ВІцВаю ВІцьЌўВЌљВёювіћ {┬▒45┬░, ┬▒30┬░, Рђд, 0┬░ Рѕф ╬Иdestination} ВЮў 20Ж░юВЮў ьћ╝ьЋГ ВйћВіцвЦ╝ ВёаьЃЮьЋа Вѕў ВъѕвІц. ╬Иdestination віћ вфЕВаЂВДђвЦ╝ ьќЦьЋўвіћ ВйћВіцвЦ╝ ВЮўв»ИьЋювІц. DLSAВЌљВёювіћ Вёав░ЋВЮђ ьўёВъг ВЃЂьЃюв│┤вІц в╣ёВџЕВЮё Ж░љВєїВІюьѓг Вѕў Въѕвіћ ьћ╝ьЋГ Ж▓йвАювЦ╝ 100%, ВдЅ ьЋГВЃЂ в╣ёВџЕ Ж░љВєїЖ░ђ Ж░ђВъЦ ьЂ░ ьћ╝ьЋГ Ж▓йвАювЦ╝ ьЃљВЃЅьЋўВўђвІц. ЖиИвЪгвѓў DSSAвіћ в╣ёВџЕ Ж░љВєїЖ░ђ Ж░ђВъЦ ьЂ░ ьћ╝ьЋГ Ж▓йвАювЦ╝ 70%вДїьЂ╝ ВёаьЃЮьЋўвЈёвАЮ ьЋўВўђвІц. вѓўвеИВДђ 30%віћ ВъёВЮўВЮў ьћ╝ьЋГ Ж▓йвАювЦ╝ ьЃљВЃЅьЋўвЈёвАЮ ьЋўВЌг ВЃѕвАюВџ┤ ьЃљВЃЅ Ж▓йвАювЦ╝ В░ЙВЮё Вѕў ВъѕвЈёвАЮ ьЋўВўђвІц(Kim, 2019).
в╣ёВџЕ(Cost)Ж│╝ improvementвіћ ВІЮ (1, 2, 3)ВЌљ ВЮўьЋ┤ Ж│ёВѓ░вљювІц.
ВІЮ (1)ВЮў CRВЮђ ВХЕвЈї ВюёьЌўвЈёвЦ╝ ВЮўв»ИьЋювІц. Tвіћ timewindowвЦ╝ ВЮўв»ИьЋўвЕ░ ьЃђ Вёав░ЋВЮё ВўѕВИАьЋўЖИ░ ВюёьЋю Вхювїђ ВІюЖ░ёВЮё ВЮўв»ИьЋювІц. crsВЎђ jвіћ Ж░ЂЖ░Ђ ьЏёв│┤ ВйћВіцВЎђ ВЃЂвїђ Вёав░ЋВЮё ВЮўв»ИьЋювІц. selfвіћ в│ИВёаВЮё ВЮўв»ИьЋювІц. вДїВЋй в│ИВёаВЮ┤ ВЃЂвїђ Вёав░ЋjВЎђ ВХЕвЈї ВюёьЌўВЮ┤ ВъѕВЮё Ж▓йВџ░, ВюёьЌўвЈёЖ░ђ Ж│ёВѓ░вљювІц. ВХЕвЈї ВюёьЌўВЮ┤ ВЌєВЮё Ж▓йВџ░, 0ВЮ┤ вљювІц. ВІЮ (2)віћ Ж░Ђ ВйћВіцв│ё в╣ёВџЕВЮё Ж│ёВѓ░ьЋювІц. ве╝Вађ Ваёв░ўвХђВЮў ьЋГВЮђ ВІЮ (1)ВЌљ ВЮўьЋ┤ Ж│ёВѓ░вљю Ж░Ђ ВйћВіцв│ё ВЃЂвїђ Вёав░ЋЖ│╝ВЮў ВюёьЌўвЈёВЮ┤вІц. ьЏёв░ўвХђВЮў ьЋГВЮђ вфЕВаЂВДђВЎђ ВйћВіцВЎђВЮў Ж░ЂвЈёвЦ╝ ВЮўв»ИьЋювІц.
ВІЮ (3)ВЮђ ьўёВъг ВйћВіцВЮў в╣ёВџЕЖ│╝ вІцвЦИ ВйћВіцВЮў в╣ёВџЕВЮў В░еВЮ┤ ВцЉ Ж░ђВъЦ ьЂ░ Ж░њВЮё improvementвАю Ж▓░ВаЋьЋювІц. ВдЅ ьўёВъг ВйћВіцВЌљВёю Вќ┤вќц ВйћВіцвЦ╝ ВёаьЃЮьЋ┤ВЋ╝ Ж░ђВъЦ ьЂгЖ▓ї в╣ёВџЕВЮё Ж░љВєїВІюьѓг Вѕў ВъѕвіћВДђвЦ╝ ВЮўв»ИьЋювІц.
в│И ВЌ░ЖхгВЌљВёю вІцВѕўВЮў Вёав░ЋВЮђ ВаЋв│┤ ЖхљьЎў, ВдЅ ВЃЂьўИ ВЋйВєЇвљю ВЃЂьЎЕВЮё ВаёВаювАю ВХЕвЈї ьћ╝ьЋГВЮё ВѕўьќЅьЋювІц. ЖиИвЪгвѓў COLREG rule 13(Overtaking), 14(Head-on), 15(Crossing)ВЌљвіћ ВЃЂвїђ Вёав░ЋЖ│╝ ВА░Вџ░ВІю Ж░ђвіЦьЋю Вџ░ьўё в│ђВ╣еВЮё ЖХїЖ│аьЋўЖ│а ВъѕвІц(COLREG, 1972). вћ░вЮ╝Вёю вІцВѕўВЮў Вёав░ЋВЮ┤ ВА░Вџ░ьЋўвіћ в│хВъАьЋю ВЃЂьЎЕВЌљВёю Вџ░ьўё в│ђВ╣еьЋўвЈёвАЮ ВёцВаЋьЋўВўђвІц.
3. ВІюв«гваѕВЮ┤ВЁў
3.1 ВІцьЌў ьЎўЖ▓й- ВЏљьўЋ ЖИ░в░ў Вёав░Ћ ВХЕвЈї ьћ╝ьЋГ вфевЇИ
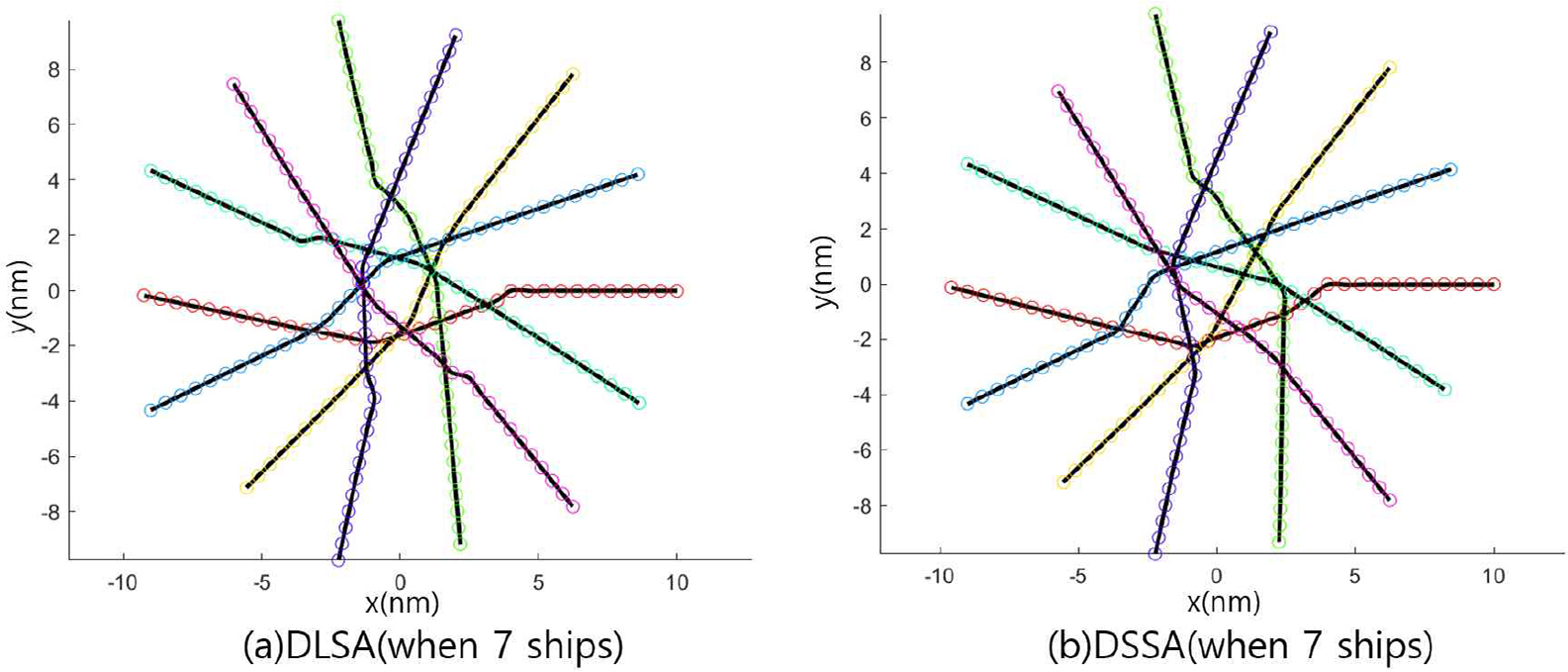
ВІцьЌў ьЎўЖ▓йВЮђ Fig. 7Ж│╝ Ж░ЎвІц. ВЏљьўЋ ЖИ░в░ў Вёав░Ћ ВХЕвЈї ьћ╝ьЋГ вфевЇИВЮё ьЎюВџЕьЋўВўђвІц. вфевЊа Вёав░ЋЖ│╝ВЮў ВЃЂвїђВаЂ ВюёВ╣ў в░Ј Ж▒░вдгЖ░ђ вЈЎВЮ╝ьЋўвЕ░ вфевЊа Вёав░ЋВЮ┤ ВцЉВЋЎВЌљВёю ЖхљВ░еьЋа Вѕў ВъѕвЈёвАЮ ьЋўВЌг Ж░ђВъЦ в│хВъАьЋю ВЃЂьЎЕВЮў ВъгьўёВЮ┤ Ж░ђвіЦьЋўвІц. Fig. 8ВЮђ 7В▓Ў Вёав░ЋВЮў Ж▓йВџ░ВЮў ВІцьЌў ВўѕВЮ┤вІц. Fig. 8(a)віћ DLSAвЦ╝ ВаЂВџЕьЋю ВўѕВЮ┤вЕ░ (b)віћ DSSAвЦ╝ ВаЂВџЕьЋю ВўѕВЮ┤вІц.
3.2 вХёВѓ░ ВЋїЖ│авдгВдў ьћ╝ьЋГ ВІцьЌў
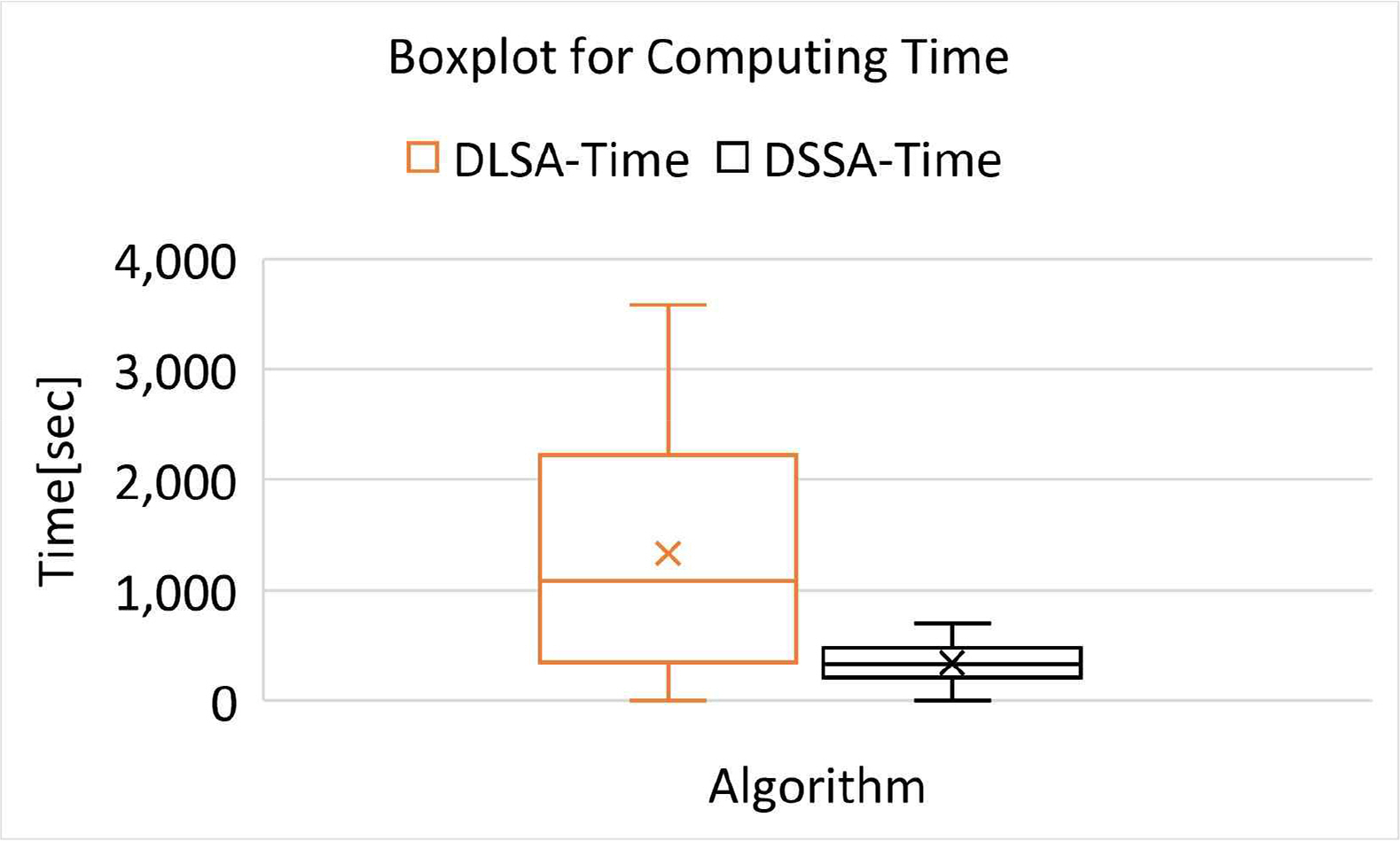
3.2.1 Computing time
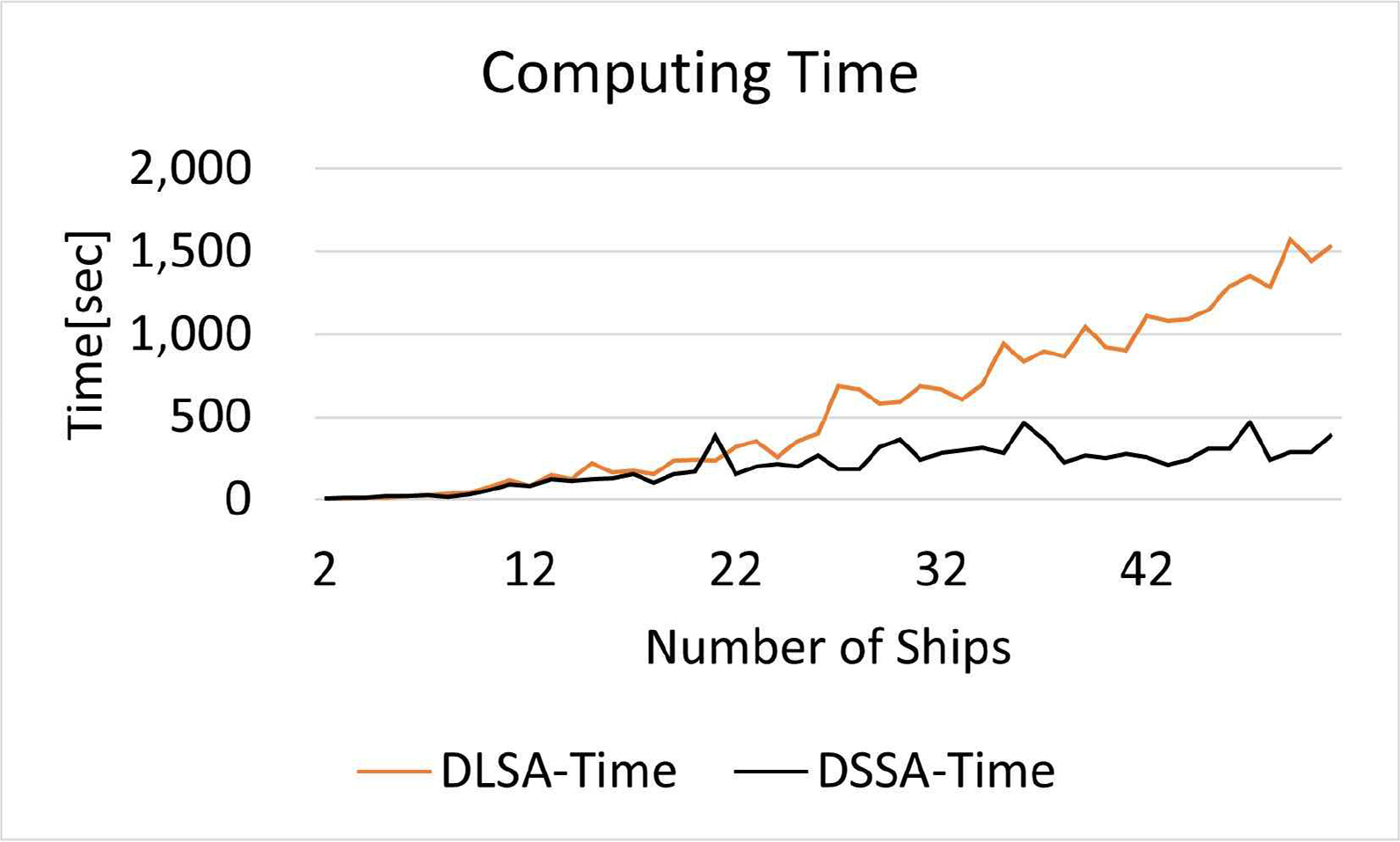
Fig. 9віћ Вёав░Ћ В▓ЎВѕў ВдЮЖ░ђВЌљ вћ░вЦИ ВЋїЖ│авдгВдўВЮў Ж│ёВѓ░ ВІюЖ░ёВЮё ВЮўв»ИьЋювІц. Ж▓ђВЮђВЃЅ ВІцВёаВЮђ DSSA, ВўцваїВДђВЃЅ ВІцВёаВЮђ DLSAвЦ╝ ВЮўв»ИьЋювІц. DLSAвіћ Вёав░Ћ В▓ЎВѕўЖ░ђ ВдЮЖ░ђьЋеВЌљ вћ░вЮ╝ ВдЮЖ░ђьЋўвіћ Ж▓йьќЦВЮё в│┤ВўђвІц. ЖиИвЪгвѓў DSSAВЮў Ж▓йВџ░, ьЂгЖ▓ї ВдЮЖ░ђьЋўВДђ ВЋіЖ│а ВЮ╝ВаЋ Ж░њВю╝вАю Вѕўва┤ьЋеВЮё в│┤ВўђВю╝вЕ░ DLSAВЌљ в╣ёьЋ┤ вѓ«ВЮђ Ж░њВЮё ЖИ░вАЮьЋўВўђвІц. Fig. 10ВЮђ boxplotвАю ьЉюВІювљю DLSA, DSSAВЮў Ж│ёВѓ░ ВІюЖ░ёВЮё ВЮўв»ИьЋювІц. DSSAвіћ DLSAВЌљ в╣ёьЋ┤ вѓ«ВЮђ ьЈЅЖиа в░Ј вХёВѓ░ВЮё в│┤ВЌгВБ╝ВЌѕвІц.
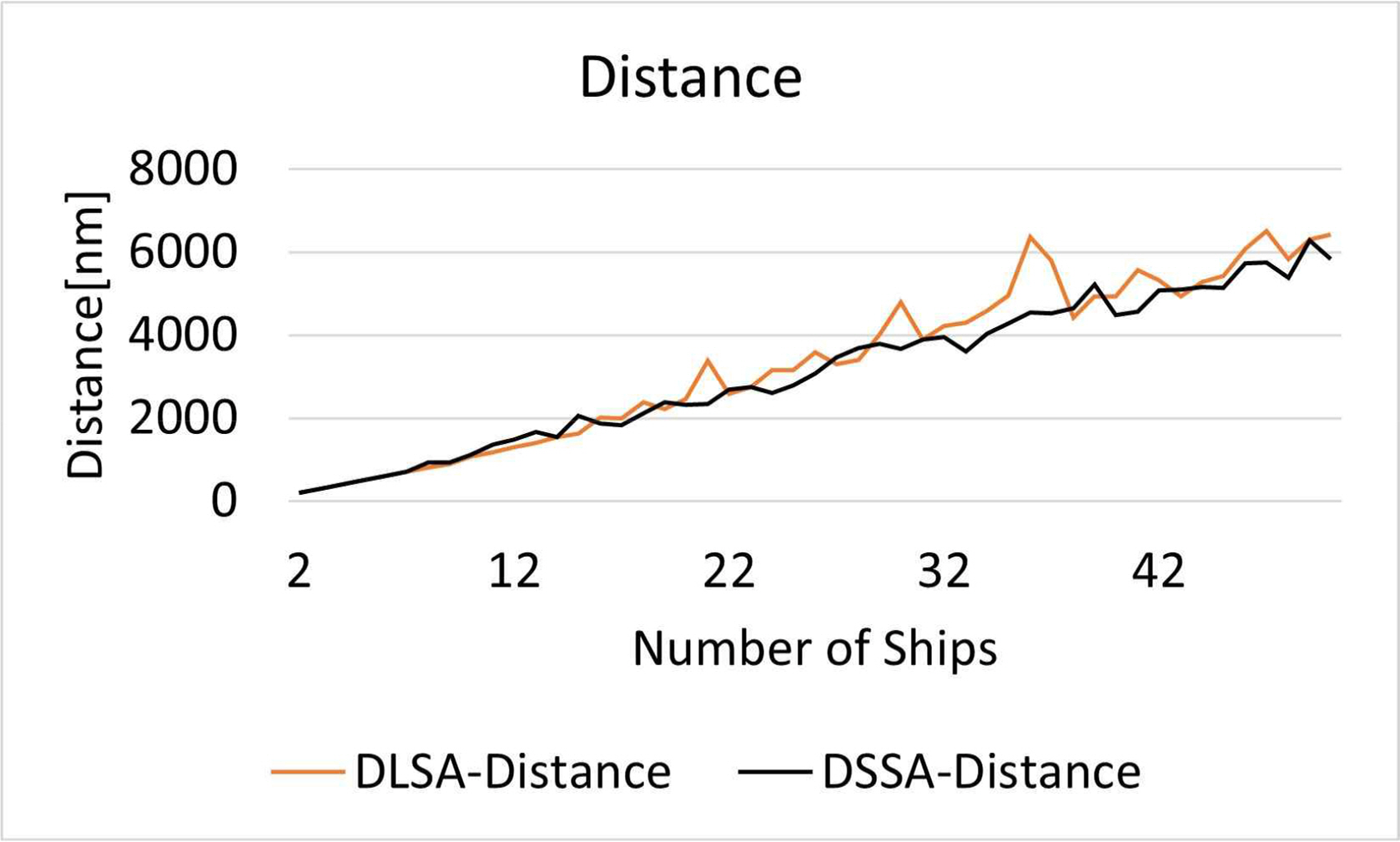
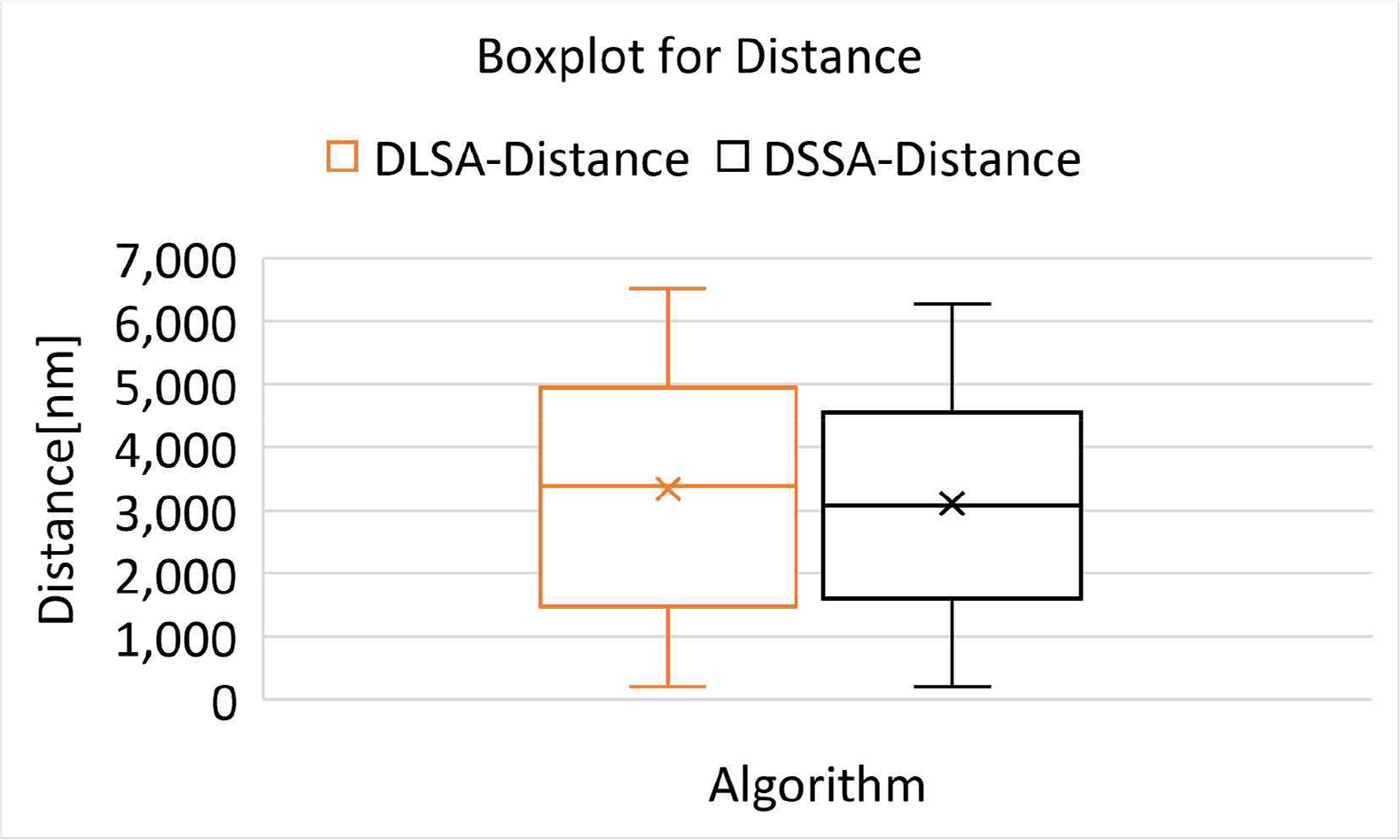
3.2.2 Sailing distance
Fig. 11ВЮђ Вёав░ЋВЮў В▓ЎВѕўВЌљ вћ░вЦИ ьЋГьќЅ Ж▒░вдгвЦ╝ ВЮўв»ИьЋювІц. Ж▓ђВЮђВЃЅ ВІцВёаВЮђ DSSA, ВўцваїВДђВЃЅ ВІцВёаВЮђ DLSAвЦ╝ ВЮўв»ИьЋювІц. Вёав░Ћ В▓ЎВѕўЖ░ђ ВдЮЖ░ђьЋаВѕўвАЮ DLSA, DSSA вфевЉљ ьЋГьќЅ Ж▒░вдгЖ░ђ ВдЮЖ░ђьЋўвіћ Ж▓ЃВЮё ьЎЋВЮИьЋўВўђвІц. вЈЎВЮ╝ьЋю ВІцьЌў ьЎўЖ▓йВЌљ вїђьЋ┤ DSSAЖ░ђ DLSAв│┤вІц ВъЉВЮђ ьЋГьќЅ Ж▒░вдгвЦ╝ ЖИ░вАЮьЋўВўђвІц. Fig. 12віћ boxplotвАю ьЉюВІювљю DLSA, DSSAВЮў ьЋГьќЅ Ж▒░вдгвЦ╝ ВЮўв»ИьЋювІц. DSSAвіћ DLSAВЌљ в╣ёьЋ┤ вѓ«ВЮђ ьЈЅЖиа в░Ј вХёВѓ░ВЮё в│┤ВЌгВБ╝ВЌѕвІц.
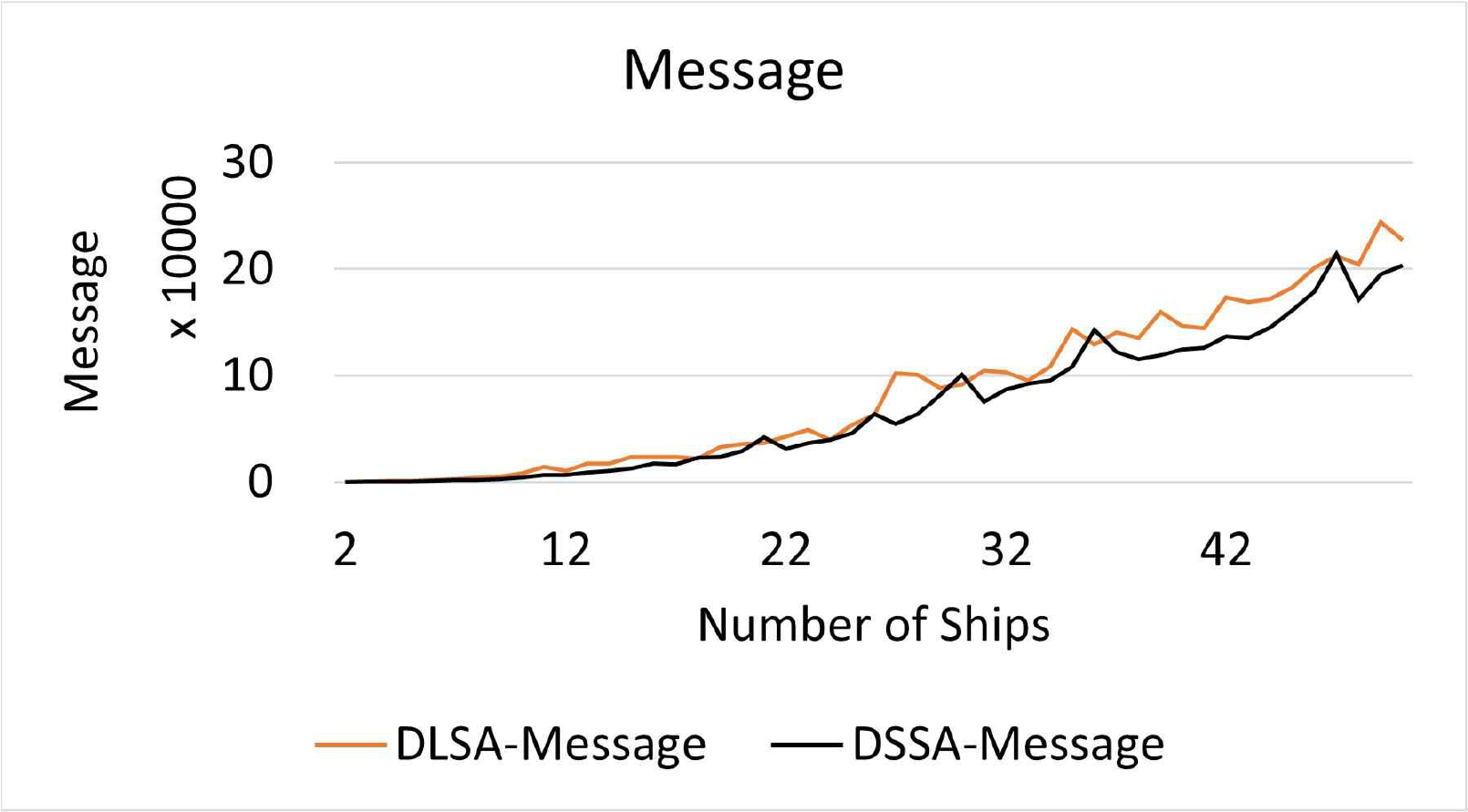
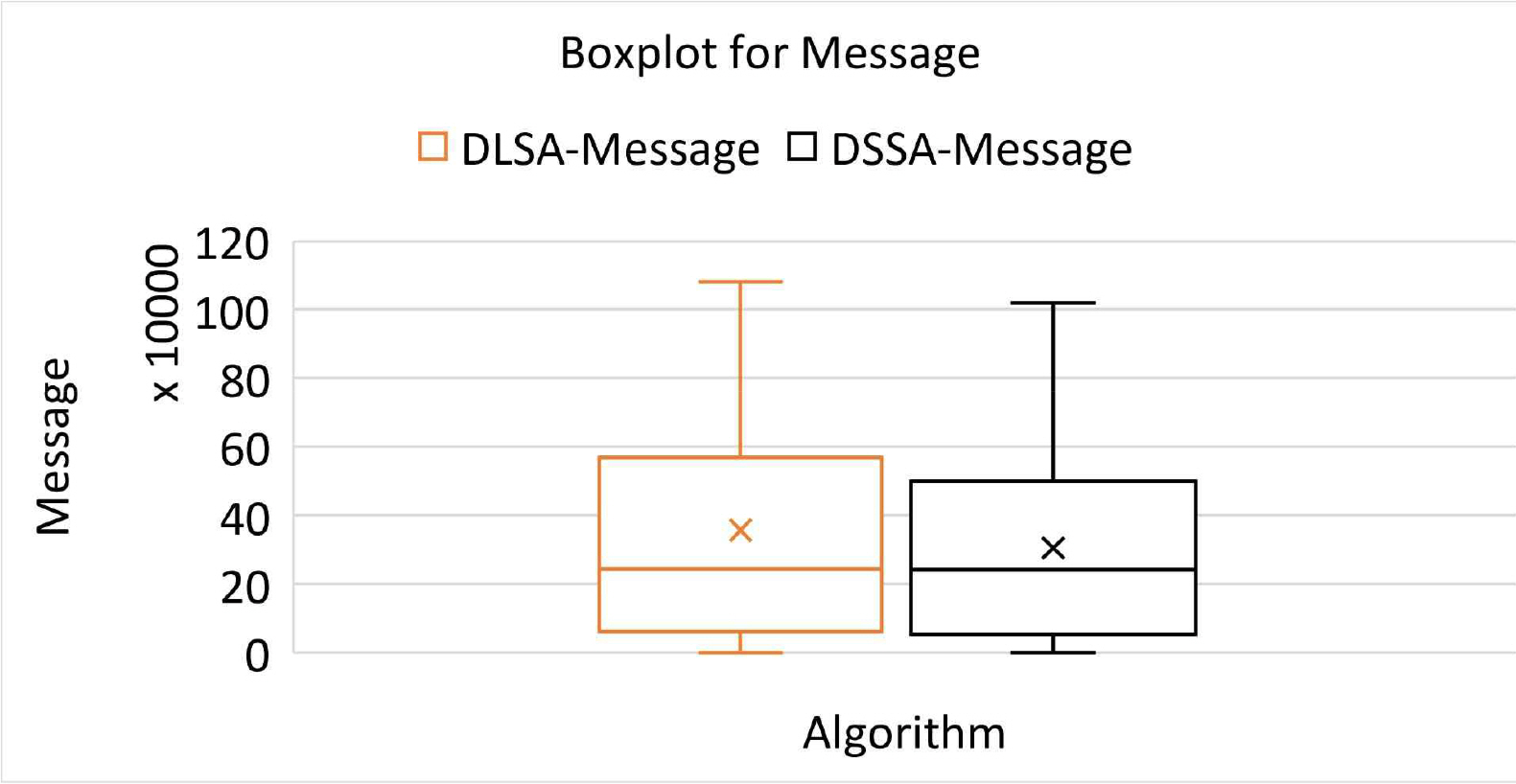
3.2.3 Number of messages
Fig. 13ВЮђ Вёав░ЋВЮў В▓ЎВѕўВЌљ вћ░вЦИ вЕћВІюВДђ ЖхљьЎў ьџЪВѕўвЦ╝ ВЮўв»ИьЋювІц. Ж▓ђВЮђВЃЅ ВІцВёаВЮђ DSSA, ВўцваїВДђВЃЅ ВІцВёаВЮђ DLSAвЦ╝ ВЮўв»ИьЋювІц. Вёав░Ћ В▓ЎВѕўЖ░ђ ВдЮЖ░ђьЋаВѕўвАЮ DLSA, DSSA вфевЉљ вЕћВІюВДђ ЖхљьЎў ьџЪВѕўЖ░ђ ВдЮЖ░ђьЋўвіћ Ж▓ЃВЮё ьЎЋВЮИьЋўВўђвІц. вЈЎВЮ╝ьЋю ВІцьЌў ьЎўЖ▓йВЌљ вїђьЋ┤ DSSAЖ░ђ DLSAв│┤вІц ВаЂВЮђ вЕћВІюВДђ ЖхљьЎў ьџЪВѕўвЦ╝ ЖИ░вАЮьЋўВўђвІц. Fig. 14віћ boxplotвАю ьЉюВІювљю DLSA, DSSAВЮў вЕћВІюВДђ ЖхљьЎў ьџЪВѕўвЦ╝ ВЮўв»ИьЋювІц. DSSAвіћ DLSAВЌљ в╣ёьЋ┤ вѓ«ВЮђ ьЈЅЖиа в░Ј вХёВѓ░ВЮё в│┤ВЌгВБ╝ВЌѕвІц.
3.3 ВІцьЌў Ж▓░Ж│╝
ВІцьЌў Ж▓░Ж│╝віћ Table 3Ж│╝ Ж░ЎвІц. вфевЊа ВІцьЌўВЌљВёю DSSAвіћ DLSAв│┤вІц вѓўВЮђ Вё▒віЦВЮё ЖИ░вАЮьЋўВўђвІц. ьі╣ьъѕ Ж│ёВѓ░ ВІюЖ░ёВЌљВёю DSSAвіћ DLSAВЌљ в╣ёьЋ┤ 25%вДї ВєїВџћвљўВЌѕвІц. Ж│ёВѓ░ ВІюЖ░ёВЮђ В╗┤ьЊеьїЁ Вё▒віЦЖ│╝ Ж┤ђваевљўвЕ░ Вќ╝вДѕвѓў в╣евдг ьћ╝ьЋГ Ж▓йвАю ьЃљВЃЅВЮ┤ Ж░ђвіЦьЋюВДђвЦ╝ ВЮўв»ИьЋювІц. Number of MessagesВЮў DSSAвіћ DLSAВЌљ в╣ёьЋ┤ 84%вЦ╝ ЖИ░вАЮьЋўВўђвІц. ВЮ┤віћ Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўЖ│╝ Ж┤ђваевљўвЕ░ Вёав░Ћ ьєхВІа ВъЦв╣ёВЮў Вё▒віЦЖ│╝ в░ђВаЉьЋю Ж┤ђваеВЮ┤ ВъѕВЮё Ж▓ЃВю╝вАю в│┤ВЮИвІц. Sailing DistanceВЮў Ж▓йВџ░, DSSAЖ░ђ DLSAВЌљ в╣ёьЋ┤ 88% ВъЉВЮђ Ж░њВЮё ЖИ░вАЮьЋўВўђвІц. ВдЅ DSSAВЮў ВхюВаЂ ьћ╝ьЋГ Ж▓йвАюЖ░ђ DLSAВЌљ в╣ёьЋ┤ ВъЉВЮїВЮё ВЮўв»ИьЋўвЕ░ ВЮ┤віћ Вёав░ЋВЮў ьЋГьќЅ Ж▒░вдг, ВЌ░вБї ьџеВюеЖ│╝ Ж┤ђваеВЮ┤ ВъѕВЮё Ж▓ЃВю╝вАю в│┤ВЮИвІц. Fig. 15віћ Table 3ВЮў ВѕўВ╣ўвЦ╝ ЖиИвъўьћёвАю ьЉюВІюьЋўВўђвІц.
4. Ж▓░ вАа
ЖИ░ВА┤ ВЌ░ЖхгВЮў Ж▓йВџ░, ВаЋв│┤ ЖхљьЎўВЌљ Ж┤ђьЋю ЖхгВ▓┤ВаЂВЮИ в░Ев▓ЋВЌљ вїђьЋю ВќИЖИЅВЮ┤ ВЌєЖ▒░вѓў ьЃђВёаВЮђ В┤ѕЖИ░ ВёцВаЋВЌљ вћ░вЮ╝ВёювДї ВЏђВДЂВЮ┤вЕ░ в│ИВёавДї ьћ╝ьЋГВЮё ьЋўвіћ ВЌ░Жхг ьЎўЖ▓йВЮ┤ вДјВЋўвІц. ВдЅ ВІцВаювАювіћ в│ИВёаВЮў ВЏђВДЂВъёВЌљ вћ░вЮ╝ ВЃЂвїђ Вёав░Ћ вўљьЋю ьћ╝ьЋГ Ж▓йвАювЦ╝ ьЃљВЃЅьЋўЖИ░ ВюёьЋ┤ вЁИваЦьЋа Ж▓ЃВЮ┤вЕ░ ВЮ┤вЪгьЋю Ж▓░Ж│╝віћ вІцВІю в│ИВёаВЮў ьћ╝ьЋГВЌљ ВўЂьќЦВЮё в»ИВ╣ювІц. ВЮ┤вЪгьЋю ВаљВЮё Жи╣в│хьЋўЖИ░ ВюёьЋ┤ в│И ВЌ░ЖхгВЌљВёювіћ Вёав░Ћ Ж░ё ВаЋв│┤ ЖхљьЎўВЌљ ЖИ░в░ўьЋю вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдўЖ│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдўВЮў Вё▒віЦВЮё в╣ёЖхљ, вХёВёЮьЋўВўђвІц.
в│И ВЌ░ЖхгВЮў вѓ┤ВџЕВЮё ВџћВЋйьЋўвЕ┤ вІцВЮїЖ│╝ Ж░ЎвІц.
┬и Вёав░Ћ Ж░ё ВХЕвЈї ьћ╝ьЋГВЮё ВюёьЋ┤ ВЏљьўЋ ЖИ░в░ў ВХЕвЈї ьћ╝ьЋГ вфевЇИВЮё ьЎюВџЕьЋўВўђвІц.
┬и Вёав░Ћ Ж░ё ВХЕвЈї ьћ╝ьЋГВЮё ВюёьЋ┤ вХёВѓ░ВДђВЌГьЃљВЃЅВЋїЖ│авдгВдўЖ│╝ вХёВѓ░ьЎЋвЦаьЃљВЃЅВЋїЖ│авдгВдўВЮў ВъЉвЈЎ в░Ев▓Ћ в░Ј Вё▒віЦВЮё в╣ёЖхљ, вХёВёЮьЋўВўђвІц.
┬и ВІцьЌўВЮђ 2В▓ЎВЌљВёю 50В▓ЎЖ╣їВДђ Вёав░ЋВЮў В▓ЎВѕўвЦ╝ ВдЮЖ░ђВІюьѓцвЕ┤Вёю ВЏљВЮў ВцЉВІгВЌљВёю вфевЊа Вёав░ЋВЮ┤ Ж░ЎВЮђ Ж▒░вдгВЌљВёю вќеВќ┤ВаИ ВЏљВЮў ВцЉВЋЎВЮё ВДђвѓў в░ўвїђьјИВЮў вфЕВаЂВДђвАю ьќЦьЋўвЈёвАЮ ьЋўВўђвІц.
┬и вфевЊа Вёав░ЋВЮђ ВЮ╝ВаЋ Ж▒░вдг(safety domain) ВЮ┤вѓ┤ВЌљвіћ ВЃЂвїђ Вёав░ЋВЮ┤ В╣еВъЁьЋўВДђ вф╗ьЋўвЈёвАЮ ьЋўВўђВю╝вЕ░ ВЮ╝ВаЋ Ж▒░вдг(detection range) ВЮ┤вѓ┤ВЮў Вёав░ЋЖ│╝ ВаЋв│┤ЖхљьЎўВЮ┤ Ж░ђвіЦьЋўвЈёвАЮ ВёцВаЋьЋўВўђвІц.
┬и ВІцьЌў Ж▓░Ж│╝ DSSAЖ░ђ DLSAВЌљ в╣ёьЋ┤ вфевЊа вХђвХёВЌљВёю Вџ░ВюёвЦ╝ ЖИ░вАЮьЋўВўђвІц. DSSAвіћ DLSAВЌљ в╣ёьЋ┤ Ж│ёВѓ░ ВІюЖ░ёВЮў Ж▓йВџ░, 25%, вЕћВІюВДђ ЖхљьЎў ьџЪВѕўВЮў Ж▓йВџ░, 84%, ьЋГьќЅ Ж▒░вдгВЮў Ж▓йВџ░, 88%вЦ╝ ЖИ░вАЮьЋўВўђвІц.
ВХћьЏё ВЌ░Жхг Ж│╝ВаювАю ВЏљьўЋ ЖИ░в░ў ВЮ┤ВЎИВЮў вІцВќЉьЋю вфеьўЋВЌљВёюВЮў ВХЕвЈї ьћ╝ьЋГВЮ┤ ьЋёВџћьЋўвЕ░ в│И ВЌ░ЖхгВЌљВёювіћ Вёав░ЋВЮў ВєЇваЦВЮ┤ вфевЉљ вЈЎВЮ╝ьЋўвЕ░ Ж░љВєЇ, Ж░ђВєЇВЮ┤ вХѕЖ░ђвіЦьЋю ВЃЂьЎЕВЌљВёю ВІцьЌўВЮё ВДёьќЅьЋўВўђвІц. ЖиИвЪгвѓў ВёаВєЇВЮў Ж░љВєЇ в░Ј вфевЊа Вёав░ЋВЮў ВєЇваЦВЮё вІцвЦ┤Ж▓ї ьЋўВЌг ВІцьЌўьЋа ьЋёВџћЖ░ђ ВъѕвІц.


 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






