


1. š ŠÀ
š š¡õ° Š˜¥ŠŠšš ÚÇš šÇšÀšÇ ŠÇŠ¿ÚŠ Š¿š´šÇ 90%š šÀŠ¯Ú´š Š¯Š¥ ÚÇšÙ Ú¥šÀš Š¯ŠË¡ ÚÇš šš šÚš õý§õ¯Úõ¡¯ šÚš˜ ÚÇšÇ ŠÑš¥ššŠ š Š¯šŠšŠ°ššÊÚ
(AIS, Automatic Identification System)š¥ŠÀ šÀš Š¯ šš ŠŠ š Š¯ ÚÙš š Š°ÇŠË¥ ÚšˋÚ Š¯ˋŠýŠÀ õ¯Š¯š š õñ¿š š¥ŠÀ ŠšÚõ° šŠÊ(Zhao and Shi, 2019; Zhen et al., 2017). Ú¿Ú ŠÚš š¡ Š´¡š Š˜Š õ¡¯Šýš¡ ÚÙš õ篚ÏÚ Š¯ˋŠýŠÀ š õ¡¯Š¯š¥ŠÀ š š˜Ú š Š¯ŠÊš ššÏš, Ú¿š ŠÊš ÚÇš õçÚçššš š šŠ₤¡Ú Ú´ÚÇš Ú˜š¯ˋÚš˜ š Š¯ šÇÚÙ õ¯š Š¯ šš õÇš šŠ¿šÊ ŠÝš ÚšˋÚõ¡¯ šÚ š¯õç˜õ¯ ÚŠ¯ÚŠÊ(Zhao and Shi, 2019).
Ú¿Ú ÚÙõç˜ š¡õñ¥š ÚÇšÙš ÚÙŠÏ Š¯ Š˜¥ŠË ššÊš ŠÚ ššŠÀ š¡ÚÇ š¥Š¯š š¥ŠÀ Ú¥šÀŠõ¯ Šš¥Šˋ¯(Oh et al., 2018), ÚÙõ瘚 šÑš
ÚçŠÀõ¯ ŠŠ õçÙŠÇ š¯š, Ú¿Ú ÚÇšš šÇ Š°çšÀÚš˜ ÚÇšÙšÇ šÂš šŠ´ÚÇšššŠ Ú¥šÀŠ šÎõ¯š Š¯ŠË¡ šÑˋŠ, šÂšÇ ŠÝš ÚÇš˜ šš ŠÎ˜šÊÚ˜š ŠšÝ šñ´š§Ú šŠ¯š šŠÊ(Lee et al., 2010). Ú¿š ÚÇšÙššš Šš õçÚç Š¯šÏŠŠ š Š¯ šÑˋŠ ŠÝ šÏš š š¡ šš šÚš š¥õ¡¯Ú Š¢ šŠŠ¥, ÚÇšõçÚçõÇš š
Š˜Ç ŠÑÚŠË¥ Šš˜ šÚÚ õÇš šŠ¿šÊŠË¥ š ÚÇÚ š šŠÊ(Oh et al., 2018; Park and Park, 2022).
š Š¯ ÚÙš Š¯šÇÚ¯Š Š˜Çš Úçš ššÊÚ
š ÚçÚÇ šÊšõ¯š¥ŠÀ ššÏŠŠ ŠšˋŠ šš¿ šõ°šÇ Š¯šÇÚ¯šÇŠÊ. õñ¡ŠÎ˜õ° š Š¯ ÚÙš õ篚ÏÚŠ š š˜Ú ÚÙš ŠÊš ÚŠš õ篚Ϛ¥ŠÀ, šÇšÏš š¡ ÚÙš ŠÊš ŠÊŠË¡ õ篚Ϛ¥ŠÀ ÚŠ°ÚŠ õ°¥š šÇŠÊ. ŠÊšš š Š¯ ÚÙš ŠÊš ššš õ篚Ϛ¥ŠÀ šš§Úš˜ ÚÙš Š¯šÇÚ¯š šõ°¥ Š°çšÀšÝš šÊš¡ŠÊŠˋÇ, õÇš šŠ¿šÊ š
Š˜Ç ŠÑÚŠË¥ Ú˜õý õý§õ¯šÚÊõ° , š Š¯ šš šÇÚÙ ŠÎ˜šÊÚ˜ ŠÚ šÊš˜ õçÙŠÇ š¯š š Š¯š ÚÙÚ šš š õ° š õ¡¯š˜Ú š šš õýšÇŠÊ. Ú¿Ú ÚÙŠÏ š¡õñ¥š Š¿ŠÀ₤Ú õçÙŠÇš šÂš š¯š ÚÇšÙ Úõý§ššš ÚÇšÇ õçÚçŠšÇ šÎõ¯ÚŠ šÑš¡šš, õÇš š
Š˜Ç ŠÑÚš õý§õ¯ Ú´õ°¥Š ŠšÝ ÚÇ õýšÇŠÊ.
ŠÊŠÏ šÊš ÚÇš šš š õ¡¯š˜Ú š šŠ š Ú´Ú ÚÙš õ篚ÏÚŠË¥ šÚÇšŠ ÚÙš Š¯ š Š¯š Ú¿šÝš šÊš š š¥ŠÀ Š¯šÚ š š˜Š š¡Àš šýŠõ¯ š š ŠšÇš¥ ÚŠÊ. šÇŠ Š´šÚ šÏŠÎ˜š šš¿š õ¯õ¿šŠÏš¥ŠÀ ÚÙš õ¯ š š˜Šõ¯ š¡Àš Šõ¡¯Š°ÇŠÊŠ, Š¿šñÚ ÚǚٚǚNJ šÑš
ÚÙ Šˆˋš , š šÂ
, ÚÇšš ŠŠ š˜õ°¥š õݯŠÎ˜ ŠÝš Š¯ŠË¡ ŠÊšÚ Šš Ú¿šÝš š š˜šÝŠ Š¯šŠšÇš¥ Ú õýšÇŠÊ. ÚÙš š Š°Çš Šš š Š°ÇŠõ°¥ Š°çšÀšÝš Šˆ õ¯š ÚÙš õ篚Ï, ŠŠ õç¯šÏ ŠÇ ŠÚ ÚÙš š¥ŠÀš´ šÊšÇŠ, ÚÙš Š¯šÇÚ¯š šÏŠÎ˜š Š¯ Šš Ú¿šÝš Ú˜õÇÚš˜ š Ú´Úõý ÚÚÚŠ ÚÙš õ¯ š š˜Š šýŠõ¯ õ篚ÏÚ õ°¥š š õ¡¯šÊšÇ ŠŠÊŠˋÇ, õÇš šŠ¿šÊš ŠÑŠÇš šÊšÇŠˋÇšŠ š Š¯ Ú¿šÝš ŠÏŠ šš Ú ÚÙŠÀŠË¥ š õ°çÚŠ Š¯ õ¡¯š˜Ú š šš õýšÇŠÊ.
Š°¡ Š
¥Š˜¡ššŠ ÚÙš Š¯šÇÚ¯š õÇŠ ´Š õݯŠÎ˜ š¡Àš Š¯ˋŠýŠÀ õ°¥ õ篚ÏÚ šõ° ŠÎ˜šÎ ŠÝš õÇŠ ´Š õ¡¯šÀÇ š¯õ瘊ʚ š¯š šÇÚ¥õ° , õñ¡ šÝõ°¥ŠÊš š¯¡õ° Úš˜ Š ÚÙš õ¯š šÏŠÎ˜š õݯŠÎ˜Š¢ šŠŠ¥ ŠšÏšŠ Ë(SOG, Speed Over Ground)š Úõñ õ¯š š¯´šÇš Šš¿š¿´ŠÀ(COG, Course Over Ground)š ŠÑš¯ õ¯š š¯´šÇŠË¥ ÚšˋÚš˜ š Š¯ ÚÙš š Šš Ú¿šÝŠÊš Ú˜õÇš š¥ŠÀ Š¯šÚŠ šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠŠË¥ š šÚšŠÊ. šÇšÇš õ¯Š¯Ú š õñ õݯŠÎ˜ šýŠõ¯ õçÙŠÇ š¯š ÚÇšÙšš š Ú´Úõý ÚšˋŠ š šŠšÏŠË¥ šÊšÎÚõ¡¯ šÚš˜ õçÙŠÇ šÈ¥š ÚÙŠÏš šÑš
Ú šÊš š Š¯ ÚÙš Š¯šÇÚ¯ŠË¥ õ¡¯Š¯š¥ŠÀ ÚÙš õ¯ õݯŠÎ˜ õ°š¯ Š¯ ÚÙš õ篚ÏÚ õ°¥š š šÚÚšŠÊ. õñ¡ŠÎ˜õ° õ¡¯šÀÇ ÚÙš õ¯ õݯŠÎ˜ õ°š¯ šýŠš Š¿õçÚš˜ õ¯Š¯Š šýŠš õ¯š¿ŠË¥ Úõ¯Úõ¡¯ šÚš˜ šõ¯š Š¯ š Šš Š¯ˋŠýŠÀ š¥ŠÀ ŠÊšÚõý ŠÑšÚšŠÊ.
2. õÇŠ ´ š¯õç˜
2.1 ÚÙš õ¯ õݯŠÎ˜ šýŠ
õ篚ÏÚ Ššš¡ š Š¯š ÚÙš š šõ¯š ڊΚ Š¯Š¥ šÚõ¯ Š°ÚŠ Šš š¡ õ¯šýÇš š Š°ÇŠË¥ ŠÇõ° šŠÊŠ Ú¿šÝšÇ ššÇ Š´š¥Ú šýŠŠÀš´ õñ¡ š š˜ŠŠË¥ š¡ÀŠÚõ¡¯õ¯ šÇŠ çŠÊ. šÇš Ú šš ÚÙš õ¯š š š˜Š, Ú¿š õñ¡ Š¯Š šýŠš¡ õݯŠÎ˜ŠË¥ ÚŠš šÊšŠÀ ÚÚÚõ¡¯ šÚ ŠÊšÚ š¡Àš Š¯ˋŠýŠÀ šÇ õ¯Š¯ŠšÇ šŠÊ(Buchin et al., 2012; Magdy et al., 2015).
š Š¯ ÚÙš W Š Ú¿š šš š š Š¯š šŠ Lat Š¯ õý§Š Lon šÂÚŠÀ ÚÚŠŠ šš¿ š Š°Ç, õñ¡ŠÎ˜õ° ŠšÏš¿´ŠÀ COG Š¯ ŠšÏšŠ Ë SOG ŠÝ õݯŠ š Š°ÇŠÀ ÚÚŠŠ š´šÇÚ˜š¡Ú¡(waypoints) wš šÏÚˋšÇŠÊ. šÇŠ š (1)õ°¥ õ¯šÇ š šÚ š šŠÊ.
šÎ, š Š¯š ÚÙš Š¯šÇÚ¯Š õ¡¯ŠÀŠ šš š Š¯Š¥ Š°ÚÚ š Š¯š šš¿ Š¯ Šš š Š°Çš šÑšÇŠË¥ š šËÚõ° šŠ šš¿ šõ°šÇ Š¯šÇÚ¯šÇŠÊ. š¥Š ´š š´šÇÚ˜š¡Ú¡ŠÀ õ瘚݊ ÚÙš š õ¡¯ÚÚš Ú¿šÝš Š¯šÚõݯŠ, Ú¿š šõ°šÇš Ú¿šÝš Š¯šÚ´š¥ŠÀš´ ÚÙš õ¯ õݯŠÎ˜Š ŠÊšõ°¥ õ¯šÇ š˜Š˜ Š¯ˋšš¥ŠÀ š šŠ š šŠÊ.
1) Úš¯šÊŠŠËÇÚ õݯŠÎ˜(Hausdorff distance)
Úš¯šÊŠŠËÇÚ õݯŠÎ˜Š š˜Š˜ õ¥ÙšÏš š¥ŠÀ šÇŠÈ´šÇšÏ šŠÀ ŠÊŠË¡ Š šÏÚˋš õݯŠÎ˜ŠË¥ š¡Àš Úõ¡¯ šÚš˜ ÚšˋŠŠ Š¯ˋŠýŠÀ š¥ŠÀš, Š ÚÙš š õ¡¯ÚÚš š š˜ŠŠË¥ š¡Àš ÚŠÊ(Alt, 2009). Úš¯šÊŠŠËÇÚ õݯŠÎ˜ŠË¥ õç˜Úõ¡¯ šÚÇšŠ š¯š šŠÀ ŠÊŠË¡ ÚÙš š õ瘚ÝÚŠ Š õ¯š š´šÇÚ˜š¡Ú¡ŠÊš Šš š¥ŠÀ ÚŠ šçš õݯŠÎ˜ŠÊš Šˆ´Š õ°š¯ÚŠÊ. Úš¯šÊŠŠËÇÚ õݯŠÎ˜Š õñ¡ šçš õݯŠÎ˜ŠÊ šÊš šçŠõ¯šÇŠÊ. õ¯õ¯ š´šÇÚ˜š¡Ú¡ a, b š šÏÚˋš¥ŠÀ šÇŠÈ´šÇšÏ ÚÙš A, B õ¯ šš Š Š ÚÙš š Úš¯šÊŠŠËÇÚ õݯŠÎ˜ hausdorff(A,B)ŠË¥ ššš¥ŠÀ š šÚ õýšÇ š (2)šÇŠÊ.
2) ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜(Dynamic Time Warping distance, DTW)
ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜Š šŠÀ ŠÊŠË¡ Š õ¯š šõ°šÇ õ¯š õݯŠÎ˜ŠË¥ š¡Àš ÚŠ Š¯ ŠŠÎ˜ š˜šˋŠŠ Š¯ˋšš¥ŠÀ, Úš¯šÊŠŠËÇÚ õݯŠÎ˜ šýŠš š š˜Úõý šŠÀ ŠÊŠË¡ ÚÙš šš šÀÇš˜ÚŠ Š õ¯š š´šÇÚ˜š¡Ú¡ŠÀ õ¯ŠËÚ Šˆ´Š õݯŠÎ˜ šÀ¯Úˋš š˜õñš š¥ŠÀ õ°š¯ÚŠÊ(Keogh and Ratanamahatana, 2005). šÇŠ Š š´šÇÚ˜š¡Ú¡š šš š ššõ¯ š¥š¿ÚšÏ šŠŠ¥Š š´šÇÚ˜š¡Ú¡ õ¯š šçš š õݯŠÎ˜ŠË¥ ÚšÚŠ š¯š¯šÇ šÚŠŠ₤ŠÀ, šŠÀ ŠÊŠË¡ õ¡¡šÇš šõ°šÇ Š¯šÇÚ¯ õ¯š š š˜ŠŠË¥ š¡ÀŠÚ š šŠÊŠ šËš šÇ šš¥Š, š¯š¯ šš ŠÑŠÇšÇ Š¿õçš Ú˜ŠÊŠ Š˜¡š õ¯ šŠÊ(Magdy et al., 2015).
õ¯õ¯ š´šÇÚ˜š¡Ú¡ a, bŠÀ šÇŠÈ´šÇšÏ ÚÙš A, Bš ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜ DTW(A, B)ŠË¥ õç˜ÚŠ šš š (3)õ°¥ õ¯ŠÊ. šÇŠ Rest(A)Š šý¨ ŠýšÏ¡ š´šÇÚ˜š¡Ú¡ŠË¥ š š¡Ú ÚÙš Aš ÚÙš Š¯šÇÚ¯ŠË¥ šŠ₤¡ÚŠÊ(Magdy et al., 2015).
3) õ¯š Š Úš¯šÊŠŠËÇÚ õݯŠÎ˜
Úš¯šÊŠŠËÇÚ õݯŠÎ˜Š Š´šÚ š´šÇÚ˜š¡Ú¡š šŠ Š¯ õý§Š š Š°ÇŠÏš ÚšˋÚš˜ õ°š¯Š šÏŠÎ˜š õݯŠÎ˜ šýŠšÇŠ₤ŠÀ, š Š¯š ŠšÏšŠ Ë Š¯ ŠšÏš¿´ŠÀ š Š°ÇŠ Š¯šŠšÏ šŠŠÊ. šÇš Zhen et al.(2017)š Š ÚÙš õ¯š Úš¯šÊŠŠËÇÚ õݯŠÎ˜, õñ¡ŠÎ˜õ° ŠšÏš¿´ŠÀõ¯š š¯´šÇŠË¥ õ¯šÊÚˋš¥ŠÀ õý¯ÚˋÚš˜ šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ õ° šÚšŠÊ.
Š°¡ š¯õ瘚šŠ ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜š Š¿ÚÇ Úš¯šÊŠŠËÇÚ õݯŠÎ˜õ¯ š¯š¯ š¡ÀŠˋÇšš ŠÑÚõ¯ š ŠÊŠ š , õñ¡ŠÎ˜õ° ÚÙš õ¯ šÏŠÎ˜š õݯŠÎ˜Š¢ šŠŠ¥ š Š¯š õݯŠ š Š°ÇŠË¥ ÚšˋÚš˜ ÚÙš š š š˜ŠŠË¥ Úõ¯Ú š šŠÊŠ š š š¯ˋšÚš˜, Zhen et al.(2017)š šýŠŠË¥ Š¯š šÚ´ ÚÚš ÚÙš õ¯ õݯŠÎ˜ Š¿õç Š¯ˋŠýŠÀ š õ¯Š¯ÚšŠÊ. Š°¡ š¯õ瘚š š šÚŠ ÚÙš õ¯ õݯŠÎ˜ š¡Àš Šýš ÚÙš õ¯š ŠšÏš¿´ŠÀš Úõñ õ¯ š¯´šÇõ¯ šŠ ŠÑš¯š š¯´šÇŠË¥ Š¯šÚ Š¢ŠÏ šŠŠ¥, ŠšÏšŠš Úõñ õ¯ š¯´šÇõ¿šÏ Š¯šÚš˜ š Š¯š õݯŠš šÂ
Úˋš š¥ŠÀ Š¯šÚŠ Š¯ˋŠýŠÀ šÇŠÊ.
2.2 õ篚ÏÚ šõ° ŠÎ˜šÎ
šš š¡õ¡ÚšŠ₤šÇ ÚÙš õ¯ õݯŠÎ˜ ŠŠ š š˜ŠŠ ÚšˋÚŠ šýŠš õñ¥õݯښ˜ ŠÊšÚõý š šŠ š šš¥Šˋ¯, õ篚ÏÚ(Clustering) Šˆ´Š¡š Š¯ŠÀ šÇ õݯŠÎ˜ šýŠš õñ¥õݯښ˜ š š˜Ú õ¯šýÇŠÊš Šš¥ õ篚Ϛ¥ŠÀ Úõ¯ÚŠÊ. õ篚ÏÚ šõ° ŠÎ˜šÎš õ°çÚçš š¥ŠÀ ÚÇš˜ šš õ°¥ õÇŠ ´Š š Ú š¯õ瘊ʚšŠ ŠÊšš ÚÙš š õ篚Ϛ¥ŠÀ ŠÏŠÊšÇ õñ¡ š Š°ÇŠË¥ šš§Úõ¡¯ šÚ Šˆˋš š¥ŠÀ š˜šˋŠšš¥Šˋ¯, ÚšˋŠ šõ° ŠÎ˜šÎš ŠˆˋÚ õç¯šÏ õ¯šš¡ K õ¯š õç¯šÏ šÊš˜š š õ¯Ýš ÚÇõ¯Š Úšš K-means šõ° ŠÎ˜šÎš ÚšˋÚõݯŠ(Kim et al.,2014; Oh et al.,2018) Š¯Š õ¡¯Š¯š DBSCAN, HDBSCAN ŠÝšÇ šÈ¥ŠÀ ÚšˋŠšŠÊ(Rong et al.,2020; Dobrkovic et al.,2018; Pallotta et al.,2013).
3. Š¯ˋŠýŠÀ
3.1 šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠ
Š°¡ š¯õ瘚šŠ šÏŠÎ˜š š¥ŠÀ Š°çšÀÚ õçÙŠÇ š¯ššš š Ú´Úõý ÚšˋŠ š šŠ ÚÙš õ¯ õݯŠÎ˜ š¡Àš Š¯ˋŠýŠÀ š õ¯Š¯Úõ° š ÚŠÊ. šÇš ÚÙš õ¯ šÏŠÎ˜š õݯŠÎ˜Š¢ šŠŠ¥ÚÙš š ÚÚ, š Š¯š Šš Ú¿šÝ ŠÝš Ú˜õÇš š¥ŠÀ Š¯šÚõ° šš (4)š õ¯šÇ Š ÚÙš õ¯š ŠšÏšŠ Ëš Úõñ õ¯š š¯´šÇ, õñ¡ŠÎ˜õ° ŠšÏš¿´ŠÀš ŠÑš¯ õ¯š š¯´šÇŠË¥ Úš¯šÊŠŠËÇÚ õݯŠÎ˜š õ¯šÊÚˋÚ š¯šš šÊõ°ÚšŠÊ.
(4)
Š ÚÙš š ŠšÏšŠ Ëš Úõñ õ¯š š¯´šÇŠ õ¯ ÚÙš š š Š¯ õ¯š š Š¯š š¡ šŠ š¯´šÇŠË¥ šŠ₤¡ÚŠˋ¯, šÇŠ š Š¯ ŠÚš š¡ Šš Ú¿šÝš ÚÇŠ¿ÚŠÊ. ÚÚ¡ Š ÚÙš š ŠšÏš¿´ŠÀš ŠÑš¯ õ¯š š¯´šÇŠ Š ÚÙš š šÏšÏšÝš š Š, šÎ ÚÙš š ÚÚš š¯´šÇŠË¥ Š¯šÚõ¡¯ šÚ ÚٚNJÊ. õ¯Š ¿ Š¯ˋÚËš Š°Úõ¯ š õݯŠ šÏšÏÚŠ ÚÙš š ŠšÏš¿´ŠÀš ŠÑš¯šÇ šš õýšÇŠˋ¯, Š°Úõ¯ Ú¯ ÚÙš š ŠÑš¯šÇ Ú˜ŠÊŠ õýš õ¯šÚ õýšÇŠÊ.
šŠÀÙõý š šŠ ÚÙš õ¯ õݯŠÎ˜ š¡Àš šýŠŠ ÚÙš õ¯ šÏŠÎ˜š õݯŠÎ˜š š Š¯š Šš Ú¿šÝ, õñ¡ŠÎ˜õ° ÚÙš ÚÚŠË¥ šÂ
Úˋš š¥ŠÀ Š¯šÚõ¡¯ šÚš˜ šÊõ°Š õýšÇŠÊ. šÇ õݯŠÎ˜ šýŠŠË¥ š šˋÚš˜ õ篚ÏÚ Ššš¡ ÚÙš ŠÊ š šýÇš ŠÚš˜ šŠÀ õ¯š õݯŠÎ˜õ¯ŠÊš õ°š¯ÚŠˋÇ, šÇ Šˆ´Š õݯŠÎ˜ š Š°ÇŠË¥ õݯŠÎ˜ ŠÏÊÚ¡ŠÎÙšÊ(distance matrix)š š šËÚ š šŠÊ. õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚ õ¯ Ú ŠŠ šÇš õ¯ ÚÙš š ŠšŠŠ₤ŠÀ šÇŠ Šˆ´Š Šõ¯ ššš õ¯šÇ 0 š¡ Šš¿ÙÚŠ ˜(symmetric matrix)šÇŠÊ. õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚŠ Šˆ´Š ÚÙš õ¯ õݯŠÎ˜ š Š°Çõ¯ š šËŠšÇ šš¥Š₤ŠÀ šÇŠË¥ šŠÀ õݯŠÎ˜õ¯ š š, šÎ š š˜Ú ÚÙš Š¥ŠÎ˜ õ篚ÏÚÚŠ šõ° ŠÎ˜šÎš ÚšˋŠŠÊ.
3.2 Š°Úˋ õç¯šÏ šõ° ŠÎ˜šÎ(Agglomerative Clustering)
Š°Úˋ õç¯šÏ šõ° ŠÎ˜šÎš Š₤¡ŠÎ˜ ŠˆˋÚÚ õç¯šÏ õ¯šõ¯ Š˜šÝŠ Šõ¿šÏ š š˜Ú õç¯šÏŠÊšÇ š šÏš š¥ŠÀ Š Ú¯ õ篚Ϛ ÚšÝÚŠ šõ° ŠÎ˜šÎšÇŠÊ(Fisher, 1996).
šõ° ŠÎ˜šÎš šÇõ¡¯ šÊš ššŠ õ篚ÏÚ Šš, šÎ š šýÇ š Š¯ ÚÙš ŠÊšÇ Šˆ´Š šŠÀ ŠÊŠË¡ õ篚Ϛ¥ŠÀ õ¯šÈ¥ŠŠÊ. Š Ú¯ õ篚Ϛ ÚšÝÚõ¡¯ õç¯šÏ õ¯ š š˜ŠŠ, šš 3.1.šš š¡õ¡Š ÚÙš š šýÇš ŠÚ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʊ˥ ÚšˋÚš˜ õ°š¯ŠŠÊ. õ篚ÏÚ šÏÚ šÊšŠ õç¯šÏ õ¯š õݯŠÎ˜, ŠŠ š š˜ŠŠË¥ õç¯šÏ ŠÇ ÚÙš ŠÊš õݯŠÎ˜š ŠÚ Úõñ õ¯š¥ŠÀ Úõ¯ÚŠŠÀ šÊš ŠŠˋ¯, õ篚Ϛ õ¯šõ¯ ŠˆˋÚ õç¯šÏ õ¯šŠ°ÇŠÊ ŠÏš õý§š¯, õ¯šË š š˜Ú õ篚ϊʚ Úˋš°õ¯Šˋ¯ šõ° ŠÎ˜šÎš šçšÂ
Š´õ°ššŠ ŠˆˋÚÚ õç¯šÏ õ¯šš Š¯Š¥ õ¯ ÚÙš ŠÊšÇ õ¯õ¯š õ篚Ϛ šÚõý ŠŠÊ.
Š°¡ š¯õ瘚šŠ šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠš š Ú´šÝš ŠÑšÚõ¡¯ šÚš˜ Š°Úˋ õç¯šÏ šõ° ŠÎ˜šÎš ŠÑš Šš ÚÙš ŠÊš š šˋÚ õý¯õ°¥ŠË¥ ÚšˋÚšŠÊ. šŠÀšÇ šýŠŠË¥ õ¡¯šÀÇ šýŠš Š¿õçÚš˜š¥ ÚŠ₤ŠÀ Šš¥Ú ŠˆˋÚ õç¯šÏ õ¯šŠË¥ šÊš Úšš¥Šˋ¯, õç¯šÏ ŠÇ ŠŠ õç¯šÏ õ¯ Ú¿šÝš Úš¡Úš˜ õñ šÏÚ Ú¿šÝš ÚÙš ŠÊšÇ Šš¥ õ篚Ϛ¥ŠÀ Ú˜š¯ˋŠšŠšÏ, Ú¿š šÇšÏš š¡ ÚÙš ŠÊšÇ õ¯õ¯ ŠÊŠË¡ õ篚Ϛ¥ŠÀš Úõ¯ŠšŠšÏŠË¥ ŠÊšÚ Š¯ˋšš¥ŠÀ ŠÑšÚšŠÊ.
4. ŠÑš Šš Š¯šÇÚ¯
Š°¡ š¯õ瘚šŠ AIS ŠÀ ššÏŠ š Š¯ ÚÙš Š¯šÇÚ¯ŠË¥ ÚšˋÚš˜ õçÙŠÇ ÚÇšÙššš š Š¯ ÚÙš õ篚ÏÚš š ÚˋÚ õݯŠÎ˜ š¡Àš Š¯ˋŠýŠÀ š õ¯Š¯Úõ° õýšÎÚšŠÊ. š (1)šš š šÚšŠ₤šÇ ÚÙš Š¯šÇÚ¯Š AIS Úçš ššÊÚ
š¥ŠÀ šÊšõ¯š¥ŠÀ ššÏŠŠ šŠ Š¯ õý§Š, ŠšÏš¿´ŠÀš ŠšÏšŠ Ë ŠÝš š Š°ÇŠË¥ ŠÇõ° šš¥Šˋ¯, õ¯ š Š¯š ŠÚ šŠ° š Š°ÇŠ šÚ¡ÚŠšÇ šŠÊ. ŠÊŠÏ Šš¥Ú š Š¯ šŠ°šŠ¥ŠˋÇ šÚ¡ÚŠ šŠ° š Š°ÇŠ Šš¥Ú õ¯š õ¯šÏõ¡¯ ŠŠ˜¡š õ¯ š´šÇÚ˜š¡Ú¡ŠÊšÇ Šš¥ š Š¯š ÚÙš š¡šÏŠË¥ ÚŠ´ÚŠ õýšŠ Š˜¡š õ¯ ššŠÊ. õñ¡ Š¯š õ瘚ýÇš š¡ šÊÚ Úõý§š šÇÚ šš¡Ú šÊÚ Š¯ õ° š¯¯ ŠÑŠÑšš ŠÊŠÈ˜ŠÊ.
ÚÙÚ šÊš¡ š Š¯š ÚÙš ŠÊš Ššš¥ŠÀ ÚÙš õ¯ õݯŠÎ˜ŠË¥ š¡Àš Úõ° õ篚ÏÚŠË¥ šÏÚÚõ¡¯ šÚš˜, šŠ Š¯ õý§Š õ¯šš šÇšš¿õ¯ šŠ ÚÙš š š š¡ÚšŠÊ. šš¡Š˜ šçŠ šŠ ËšÇ 2knots(3.7km/h) šÇÚš¡ ÚÙš š š šÏÚ š Š¯š ÚÙš Š¯šÇÚ¯ŠÀ õ¯šÈ¥Úš˜ ŠÏš¯˜õ¯šÏŠÀ Šˆ´Š ŠÑš Šš Š¯šÇÚ¯šš š š¡ÚšŠÊ.
š (4)š õ¯šÇ šš¿ š Š°Çš š Š¯ Šš š Š°ÇŠË¥ õý¯ÚˋÚš˜ š šŠ šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ šÊš ÚÙš Š¯šÇÚ¯š š šˋÚŠ ÊŠˋÇ õ¯ Ú¿šÝš Šýš Š¯ Š´š š¯´šÇŠË¥ õ° Š ÊÚš˜ š õñÚÚš˜š¥ ÚŠÊ. Šš ÚÙš Š¯šÇÚ¯š šŠ Š¯ õý§Š, ŠšÏšŠ Ëš ŠÚÇšŠ šçšõ¯š 0, šçŠõ¯š 1 ŠÀ ŠÏÊÚÚš˜ š õñÚÚšš¥Šˋ¯, õ¯Šš¡ ŠšÏš¿´ŠÀŠ š˜š¡(sine) Ú´šŠË¥ ÚšˋÚš˜ ŠÏš¯˜õ¯šÏŠÀ 0 õ°¥ 1 š˜šÇš õ¯š¥ŠÀ š õñÚÚšŠÊ.
5. šÊÚ Š¯ õ° š¯¯
Š°¡ š¯õ瘚šŠ õ¯Š¯Ú šŠÀšÇ õݯŠÎ˜ šýŠš õ¯š¿ŠË¥ õýšÎÚõ¡¯ šÚš˜, š õñ õݯŠÎ˜ šýŠ Š¯ õ¡¯šÀÇš õݯŠÎ˜ šýŠŠÊ õ¯õ¯š Š¯ˋŠýš¥ŠÀ õ°š¯Š õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚ Šš¥Ú Š°Úˋ õ篚ÏÚ šõ° ŠÎ˜šÎš š šˋÚš˜ õñ¡ õý¯õ°¥ŠË¥ Š¿õçÚŠ šÊÚš šÚÚšŠÊ.
šš 3.1 šš šš ÚšŠ₤šÇ, Š°¡ š¯õ瘚šŠ ÚÙš š ÚÚš š Š¯š Šš Ú¿šÝš š¯´šÇ, õñ¡ŠÎ˜õ° ÚÙš õ¯ šÏŠÎ˜š õݯŠÎ˜ŠË¥ Š¯šÚ õݯŠÎ˜ šýŠŠË¥ õ° šÚšŠÊ. šÇ õݯŠÎ˜Š š (4)š õ¯ ÚÙš ŠÑš˜ŠŠ õ¯šÊš¿ šÀ¯Úˋš šÚÇ ŠÊšÚõý š šŠ š šŠÊ. ÚÙš õ篚ÏÚ õ°¥š š ŠÑš Šš š šýÇ ÚÙš ŠÊ õ¯š õ¯ŠËÚ Šˆ´Š õݯŠÎ˜š ŠÚ õ¯š š šËÚ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚ õ¡¯Š¯Úš˜ šÇŠÈ´šÇšÏŠÊ. šÎ, ÚÙš š õ¯šõ¯ ŠÏššÏšŠÀ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʊ˥ ššÝÚŠ Š¯ ŠŠ š¯š¯Šš š õ°Ýš¥ŠÀ šÎõ¯ÚŠˋ¯, Šš ÚÙš õ¯šõ¯ Šš¥ÚŠŠ¥Š š šŠŠ ÚÙš õ¯ õݯŠÎ˜ šýŠõ¯ ŠšÇŠŠˋÇ õ°š¯Úš˜š¥ ÚŠ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚ šŠ õñ¡š Š¿ŠÀÚš˜ ŠšÇŠ õýšÇŠÊ. õñ¡Š˜Š₤ŠÀ õ¡¯šÀÇ ÚÙš õ¯ õݯŠÎ˜ šýŠš šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ Š¿õçÚŠ šÊÚ šÇš š, šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ ÚŠŠÀ š šÚ š šŠ šçš š õ¯šÊš¿ šÀ¯Úˋš Úš¡Úõ¡¯ šÚ šÊÚšÇ š ÚŠ õýšÇŠÊ.
õ¡¯šÀÇ ÚÙš õ¯ õݯŠÎ˜ šýŠš Š¿õçÚš˜ šŠÀšÇ õݯŠÎ˜ šýŠš š Ú´šÝš õýšÎÚŠ šÊÚššŠ šÊš ÚÙš Š¯šÇÚ¯š ŠÚÇ Úš¯šÊŠŠËÇÚ õݯŠÎ˜š ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜, õñ¡ŠÎ˜õ° š ÚŠ šÊÚšš Š¯õý˜Š šçš š õ¯šÊš¿ šÀ¯Úˋš¥ŠÀ š šŠ šŠÀšÇ õݯŠÎ˜ ŠÝ šÇ š¡ õ¯šÏ õݯŠÎ˜ šýŠš õ¡¯Š¯Ú õ篚ÏÚ õý¯õ°¥ŠË¥ ŠÊšÚ š¡ÀŠˋÇšš Š¿õçÚšŠÊ. š¯š õ¯ šýŠš õ¡¯Š¯Ú õݯŠÎ˜ ŠÏÊÚ¡ŠÎÙšÊõ¯ š¥ŠÏŠ š šÚõý õ°š¯ŠŠšÏŠË¥ Š¿õçÚ´š¥ŠÀš´ š¯š¯ š¡ÀŠˋÇššš Ú´š´šÝš Š¿õçÚšŠÊ. šÇšÇš š¡ õ¯šÏ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʚ Šš¥ õ篚ÏÚ šõ° ŠÎ˜šÎš š šˋÚ õý¯õ°¥ŠË¥ š Šš šýŠ, õñ¡ŠÎ˜õ° õ篚ϊ° ÚÙš Š¯šÇÚ¯š Ú¿šÝŠ° ŠÑÚ˜ŠË¥ Úš¡Ú š šŠ šõ¯Ú Š¯ˋŠýŠÀ š ÚšˋÚš˜ Š¿õçÚšŠÊ.
ÚÙš Š°Úˋ õ篚ÏÚ šõ° ŠÎ˜šÎš šÀ¯õÝÇš Šˆ´Š šÊÚšš Šš¥Úõý š šˋŠšŠÊ. šçšÂ
õç¯šÏ õ¯šõ¯ 5 õ¯õ¯ Š Šõ¿šÏ š š˜Ú õ篚Ϛ Š°ÚˋÚŠŠÀ šÊš Ššš¥Šˋ¯, õ篚Ïõ¯ š š˜ŠŠ šŠÀ ŠÊŠË¡ õ篚Ϛ šÚŠ Š ÚÙš õ¯ õݯŠÎ˜õ¯ŠÊš Úõñ õ¯š¥ŠÀ õ°š¯ŠšŠÊ.
õ篚ÏÚ õý¯õ°¥š ŠÚ š Šš Úõ¯Š õç¯šÏ ŠÇ Š°Š Š¯ õç¯šÏ õ¯ š š˜ŠŠË¥ šÏõÇš š¥ŠÀ š¡Àš ÚŠ Davies-Bouldin šÏÚ(DB)ŠË¥ ÚšˋÚŠˋ¯, šÇŠ šÇ Nõ¯š õ篚Ϛ ŠÚÇ õç¯šÏ iš õç¯šÏ jš ŠÚ šÊš˜š (centroids) c š˜šÇš š ÚNJΘŠš¡ õݯŠÎ˜(Euclidean distance)ŠÀ š šŠ õç¯šÏ õ¯ õݯŠÎ˜ M š ŠÑŠˆ´ŠÀ Úõ° , õç¯šÏ ŠÇ šÊš˜š ŠŠ¿ ÚÙš š´šÇÚ˜š¡Ú¡ X ŠÊš Š°ŠšÝš¥ŠÀ š šŠ S ŠË¥ ŠÑšŠÀ ÚŠ šÏÚ R ŠÀš´ š (5)š õ¯šÇ š šŠŠÊ(Davies and Bouldin, 1979). šÎ, õç¯šÏ ŠÇ Š°ŠšÝš šõ° , õç¯šÏ õ¯ õݯŠÎ˜Š ŠˋŠŠÀ š õ篚ÏÚŠšÇ šš¥ŠˋÇ Davies-Bouldin šÏÚš õ¯š šššÏŠÊ.
(5)
š˜šÇ ŠÏõ° ÚÇšš šÇ Š°çšÀÚ õçÙŠÇ š¯š Úõý§ššš š Ú´šÝš šÊšÎÚõ¡¯ šÚš˜, 2022 Š
11 š õ¯ šŠ´ÚÇšš šÈ¥š ÚÙõ瘚 š
ÚÙÚŠ Š¿šÇš š Š¯ŠÊš šÊš ÚÙš ŠÊšÇ šÊÚšš ÚšˋŠšŠÊ.
5.1 šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠš šçš õ¯šÊš¿ šÀ¯Úˋ Úš
šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ŠË¥ š šÚ šçš š õ¯šÊš¿ šÀ¯Úˋš ÚšÚõ¡¯ šÚš˜, 2022 Š
11 š õ¯ Ú˜ÚÙÚÙšš šÑÚÙÚš˜ õÇšÚÙš š
ÚÙÚ Š¿šÇš š Š¯ŠÊš 37 õ¯š ÚÙš ŠÊš Ššš¥ŠÀ, š¡ õ¯šÏš õ¯šÊš¿ šÀ¯Úˋš¥ŠÀ õ°š¯Ú ÚÙš õ¯ õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʊ˥ õ¡¯Š¯š¥ŠÀ õ篚ÏÚŠË¥ šÚÚšŠÊ. õ¯šÊš¿ šÀ¯Úˋ 1 š Úš¯šÊŠŠËÇÚ õݯŠÎ˜õ¯šÇ šŠ ÚÙš õ¯šË Ú¯ õ¯šÊš¿š¡ 0.5 ŠË¥ Šõ° , õñ¡ š¡š ÚÙššŠ 0.25 ŠÀ õñ ŠÝÚõý õ¯šÊš¿ŠË¥ ŠÑš˜Ú šÀ¯ÚˋšÇŠÊ. Š¿šñÚ Š¯ˋšš¥ŠÀ šÀ¯Úˋ 2 Š š Š¯ õ¯ Úõñ ŠšÏšŠ Ëš š¯´šÇ, õñ¡ŠÎ˜õ° šÀ¯Úˋ 3 š ŠšÏš¿´ŠÀš ŠÑš¯š õ¯šË Ú¯ õ¯šÊš¿ŠË¥ ŠÑš˜ÚšŠÊ.
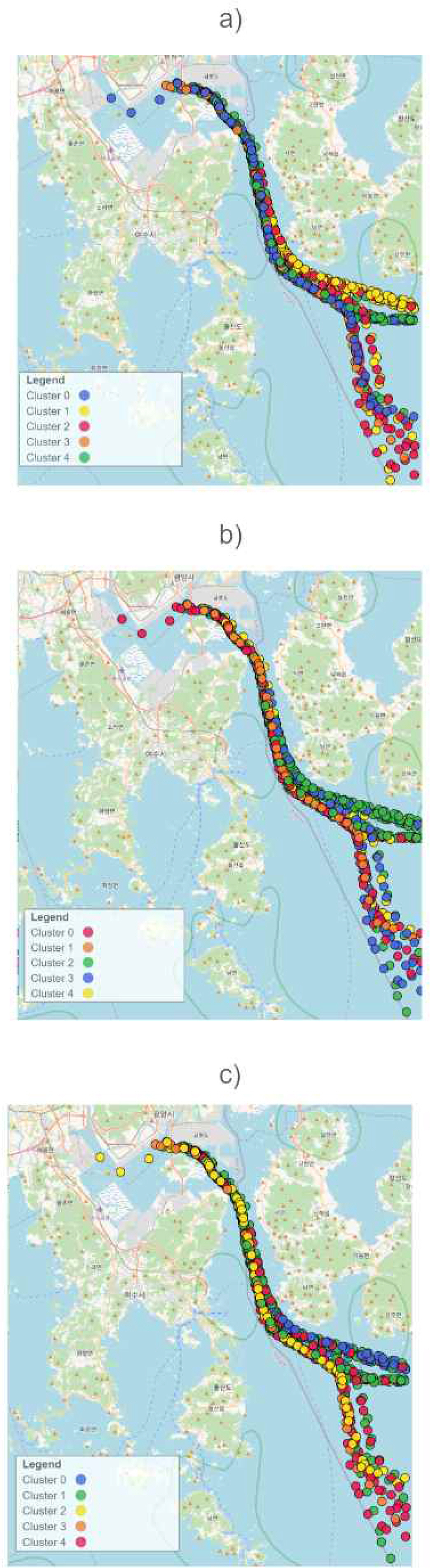
Fig. 1 š a), b), õñ¡ŠÎ˜õ° c)Š õ¯õ¯ õ¯šÊš¿ šÀ¯Úˋ 1, šÀ¯Úˋ 2, õñ¡ŠÎ˜õ° šÀ¯Úˋ 3 š š šˋÚš˜ ÚÙš ŠÊš ŠÊš₤ õ¯š õ篚Ϛ¥ŠÀ ŠÏŠÊšÇ õ¯š õ篚Ϛ Šš¥Ú šš¥ŠÀ ÚÙš š š´šÇÚ˜š¡Ú¡ŠÊš šÏŠšš ÚšÚ õý¯õ°¥šÇŠÊ. šÏŠÎ˜š š Š°Çš ÚÙš š ÚÚŠË¥ õ¡¯šÊš¥ŠÀ õÇšÚÙš¥ŠÀ š õñ¥ÚŠ ÚÙš ŠÊš š˜õ°¥ Š¿õçš õ¯õ¿šÇ ÚÙš , õñ¡ŠÎ˜õ° Š´¥ Š¯ŠÊŠÀŠÑÚ¯ š õñ¥ÚŠ ÚÙš Ú˜õý Š õ¯šÏŠÀ ŠÑõ¡¯ŠŠˋ¯, š¡ õ¯šÏ šÀ¯Úˋš õ篚ÏÚ õý¯õ°¥õ¯ š Š¯š š¥ŠÀ õñ¡Š˜Ú ÚÙš š ÚÚ š¯´šÇŠË¥ Š¯šÚõ° ššš Úš¡Ú š šŠÊ.
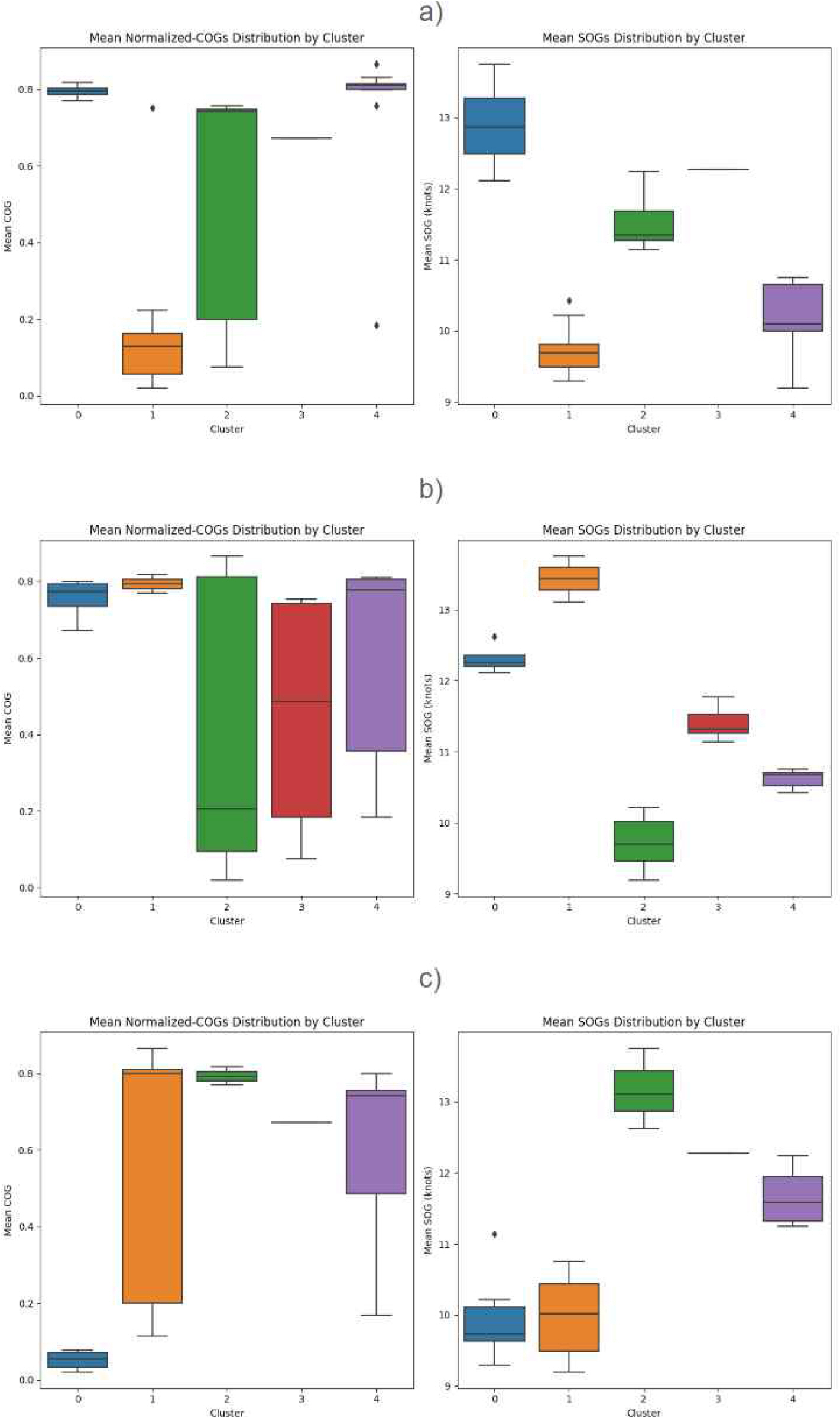
ÚÙš š ÚÚŠ šš¿ š Š°Ç š¡šŠ š Š¯š õݯŠ õÇŠ ´ š Š°Çõ¯ õ篚ÏÚš Š¯šŠŠšÏ ŠÑšÚõ¡¯ šÚš˜ õ¯ õ篚Ϛ šÚŠ ÚÙš ŠÊš Úõñ ŠšÏš¿´ŠÀõ¯õ°¥ Úõñ ŠšÏšŠ Ëš ŠÑÚ˜ŠË¥ Úš¡ÚšŠÊ. Fig. 2 š a), b), õñ¡ŠÎ˜õ° c)Š õ¯õ¯ õ¯šÊš¿ šÀ¯Úˋ 1, šÀ¯Úˋ 2, õñ¡ŠÎ˜õ° šÀ¯Úˋ 3 š¥ŠÀ ÚÙš õ¯ õݯŠÎ˜ŠË¥ š šÚõ° , õ¯ õç¯šÏ ŠÇ ÚÙš ŠÊ õ¯õ¯š š õñÚŠ ŠšÏš¿´ŠÀõ¯š Úõñ õ¯ŠÊ, õñ¡ŠÎ˜õ° ŠšÏšŠ Ëš Úõñ õ¯ŠÊ ŠÑÚ˜ŠË¥ Š¯šÊ ÚŠÀ₤(box plot)š¥ŠÀ šõ¯ÚÚ õýšÇŠÊ. õ¯õ¯š šõ¯Ú šŠÈšš, Š¯šÊš ŠšÇõ¯ šÏÏššŠÀ ÚÇŠ¿ õ篚ϚšŠ Úõñ š¥ŠÀ ŠÚŠŠ š Š¯ õݯŠš õý§ÚËšÝšÇ Š¿õçš õñ šÏÚ ÚÙš ŠÊšÇ Š˜ÑšŠÊõ° ÚÇšÚ š šŠÊ. Š, õ¯ õ篚Ϛ Š¯šÊš ŠšÇõ¯ õ¯õ¯ ŠÊŠË¡ Šýšš õÝ¡š° šŠÊŠˋÇ, ÚÇŠ¿ õ篚ÏÚ õý¯õ°¥Š šÇšÏš š¡ Ú¿šÝš šÏŠ ÚÙš ŠÊš ŠÊŠË¡ õ篚Ϛ¥ŠÀš š ŠÑŠËÚšŠÊõ° ÚÇšÚ š šŠÊ.
š¡ õ¯šÏ õ¯šÊš¿ šÀ¯Úˋ Šˆ´Ššš š Š¯š ŠšÏš¿´ŠÀ, õñ¡ŠÎ˜õ° ŠšÏšŠ Ë ŠÑÚ˜š š¯´šÇŠË¥ Ú´õ£ õ¯šÚŠˋÇ õ篚ϊ°ŠÀ š¯´šÇõ¯ Úš¡ŠŠÊ. ŠÊŠÏ, õ¯šÊš¿ šÀ¯Úˋ 1 ššŠ ÚÙš ŠšÏšŠ ËŠ¢ šŠŠ¥ ŠšÏš¿´ŠÀš ŠÑÚ˜ššŠ õ篚ϊ° š¯´šÇõ¯ Šˆ
ÚÚõ° , õç¯šÏ ŠÇ õ¯ šš¿š ŠÑš¯šÇ ŠÊŠË¡ šÀ¯Úˋš Š¿ÚÇ šŠÊŠ š šÇ Úš¡ŠŠÊ. ŠÚ Table 1 šš Úš¡Ú š šŠ₤šÇ, Davies-Bouldin šÏÚŠË¥ ÚšˋÚ š Šš õ篚ÏÚ Úõ¯ šýŠššŠ, õ¯šÊš¿ šÀ¯Úˋ 1 š šÏÚŠ 4.88 ŠÀ, ŠÊŠË¡ šÀ¯Úˋš 7.5 ŠŠ 7.7 š Š¿ÚÇ õ¯šÇ ŠÛŠÊŠ õýš š š šŠÊ. šÇŠ˜Ú õý¯õ°¥ŠË¥ šÂ
ÚˋÚš˜, Š°¡ š¯õ瘚š š šÚ šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠŠË¥ šçš š¥ŠÀ š šÚŠ šÀ¯Úˋš¥ŠÀš õ¯šÊš¿ šÀ¯Úˋ 1 š š ÚÚšŠÊ.
5.2 õ¡¯šÀÇ õݯŠÎ˜ šýŠš šŠÀšÇ šýŠ õ¯ Š¿õç
ÚÙŠÏš š õñ¥ÚŠ šÊš š Š¯ ÚÙš š ÚšˋÚ š ÚŠ šÊÚš ÚçÚÇ šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠŠË¥ š šÚõ¡¯ šÚ šçš š õ¯šÊš¿ šÀ¯Úˋš Úš¡ÚšŠÊ. ŠÏš¯˜õ¯šÏš Š¯ˋšš¥ŠÀ õ¡¯šÀÇ ÚÙš õ¯ õݯŠÎ˜ š¡Àš Š¯ˋš ŠŠ¿ Š°¡ Š
¥Š˜¡šš š šÚŠ šŠÀšÇ šýŠš š Ú´šÝš šÊšÎÚõ° š 2022 Š
11 š õ¯ š šÈ¥ÚÙšš šÑÚÙÚš˜ ŠˆˋÚ˜ÚÙš š
ÚÙÚ Š¿šÇš š Š¯ŠÊš 242 õ¯š ÚÙš ŠÊš Ššš¥ŠÀ š¡ õ¯šÏš õݯŠÎ˜ š¡Àš Š¯ˋšš¥ŠÀ õ°š¯Ú õݯŠÎ˜ŠË¥ õ¡¯Š¯š¥ŠÀ õ篚ÏÚŠË¥ šÚÚšŠÊ. šÎ, Úš¯šÊŠŠËÇÚ õݯŠÎ˜, ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜, õñ¡ŠÎ˜õ° š (6)š õ¯šÇ õ°š¯ŠŠ šŠÀšÇ õݯŠÎ˜ŠË¥ š šˋÚš˜ õ¯õ¯š õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʊ˥ õ°š¯Úõ° , Šš¥Ú õ篚ÏÚ šõ° ŠÎ˜šÎš š šˋÚŠ õ°¥š š ŠÊšÚ õÇš šš Š¿õç ŠÑšÚšŠÊ.
(6)
š¯š Table 2 ššŠ ÚÙš õ¯ õݯŠÎ˜ šýŠŠ° õݯŠÎ˜ ŠÏÊÚ¡ŠÎٚʊ˥ õ°š¯ÚŠ Š¯ ššŠ š¯š¯ šõ¯š Úš¡Ú š šŠÊ. Šš¥Ú ÚÙš Š¯šÇÚ¯š ŠÚÇ Úš¯šÊŠŠËÇÚ õݯŠÎ˜, õñ¡ŠÎ˜õ° šŠÀšÇ õݯŠÎ˜ šýŠššŠ õݯŠÎ˜ ŠÏÊÚ¡ŠÎÙšÊ š¯š¯šÇ š§ 249 šÇ š Šõ¯ ššŠŠ, ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜š ŠÚÇšŠ õñ¡Š°ÇŠÊ 2 ŠÑ šÇššÇ Š ššŠ š§ 374 šÇõ¯ õ¡¯ŠÀŠšŠÊ. šÇŠ Š¿õçš š¯š¯ŠšÇ ŠÏŠÊŠ ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜š ŠÚ Š´š š šÏš Ú õ¡¯šÀÇ š¯õ瘊Êõ°¥ š¥š¿ÚŠ õý¯õ°¥šÇŠÊ(Magdy et al., 2015).
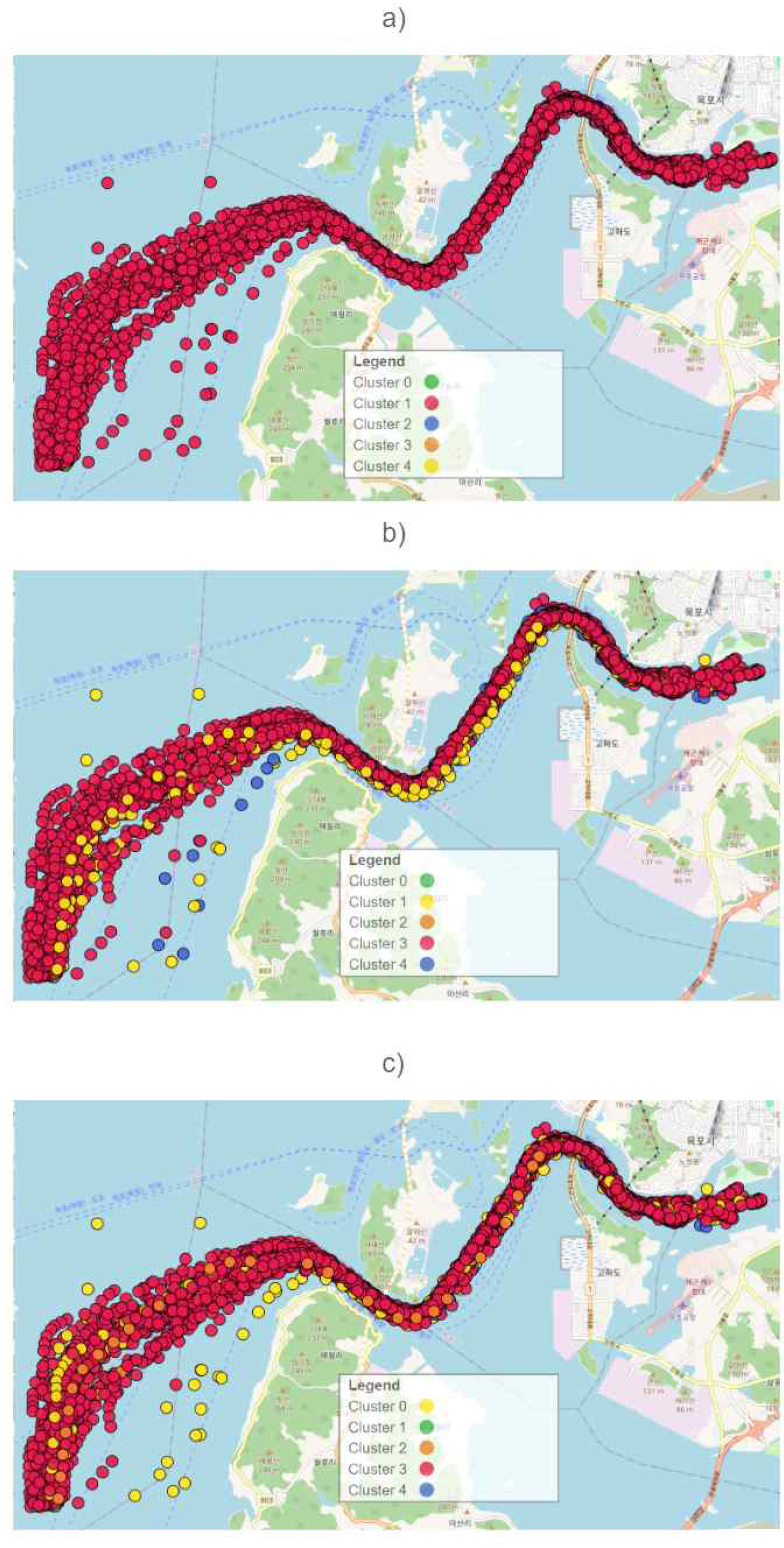
Fig. 3 š a), b), õñ¡ŠÎ˜õ° c)Š õ¯õ¯ õ¯šÊš¿ Úš¯šÊŠŠËÇÚ õݯŠÎ˜, ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜, õñ¡ŠÎ˜õ° šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ š šˋÚ õ篚ÏÚš õý¯õ°¥šÇŠÊ. Fig. 1 õ°¥ ŠÏš¯˜õ¯šÏŠÀ, Šš¥Ú õ篚Ϛ Šš¥Ú šš š´šÇÚ˜š¡Ú¡ŠÊŠÀ šÏŠšš ÚšŠšŠÊ. Fig. 3 š a)šš ŠÚŠŠ₤šÇ, Úš¯šÊŠŠËÇÚ õݯŠÎ˜ŠË¥ ÚšˋÚ õ篚ÏÚ õý¯õ°¥Š õݯš Šˆ´Š ÚÙš ŠÊš õ¯š õ篚Ϛ¥ŠÀ ÚŠ´Ú õýš š š šŠÊ. ÚÚ¡ ŠÊšÇŠÇŠ₤¿ Úš šÚš š šˋÚ b)Š a)š Š¿ÚÇ šÂ Š š õçÚ õ篚ÏÚ õý¯õ°¥ŠË¥ Š°Çš˜šÈ¥õ° šŠÊ. Ú¿Ú ÚÇŠ¿ õý¯õ°¥ššŠ Š¿õçš ÚÇšš š õñ¥š Ú ÚÙš ŠÊš š˜Ú ŠÊŠË¡ ÚÙš õ°¥Š ŠÊŠË¡ õ篚Ϛ¥ŠÀ õ°š¯Š õýš š š šŠÊ. ÚÚ¡ c)Š šš Úš¡Ú a)š b)š õ篚ÏÚ õý¯õ°¥š Š¿õçÚš˜ Ú¿Ú Š´¥ Š¯ŠÊšš š
ÚÙÚŠ ÚÙš ŠÊš ŠÚÇ šÂ Š ŠÊšÚõý õ篚ÏÚÚ õý¯õ°¥ŠË¥ Š°Çš˜šÈ¥õ° šŠÊ.
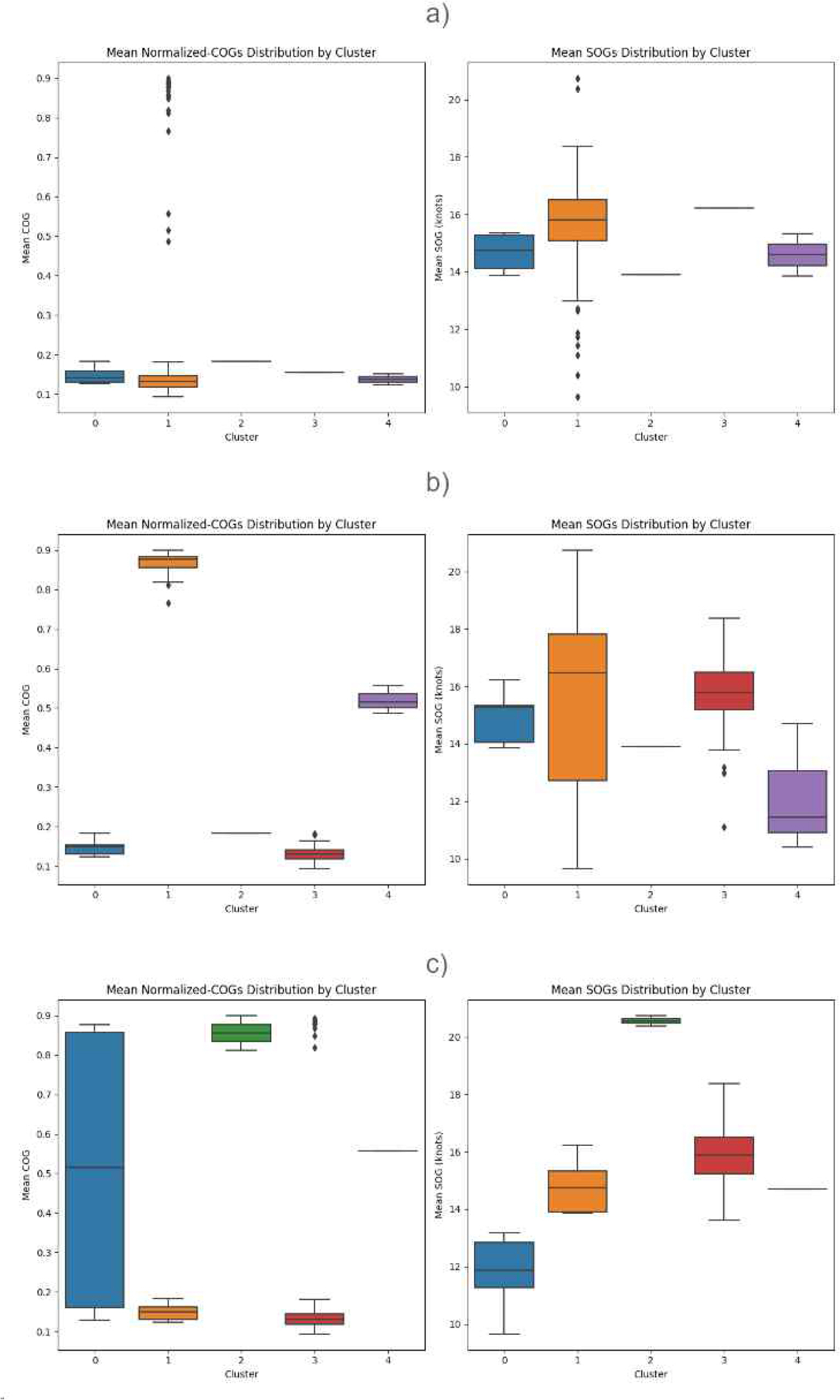
5.1.õ°¥ ŠÏš¯˜õ¯šÏŠÀ õ¯ õݯŠÎ˜ šýŠš õ¡¯Š¯Ú ÚÙš õ篚ÏÚ õý¯õ°¥õ¯ š Š¯Š° õݯŠ š Š°ÇŠË¥ Š¯šÚšŠšÏ Úš¡Úõ¡¯ šÚš˜, Fig. 4 õ°¥ õ¯šÇ õ篚ϊ° ÚÙš ŠÊš Úõñ ŠšÏš¿´ŠÀõ¯õ°¥ Úõñ ŠšÏšŠ Ëš ŠÑÚ˜ŠË¥ Úš¡ÚšŠÊ. Fig. 4 š a)Š Úš¯šÊŠŠËÇÚ õݯŠÎ˜ õ¡¯Š¯ õ篚ÏÚ õý¯õ°¥ššŠ ŠšÏš¿´ŠÀ Š¯ ŠšÏšŠ Ëšš õ篚ϊ° š¯´šÇõ¯ õݯš ŠÚŠšÏ šŠŠÊ. ÚÚ¡ ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜ õ¡¯Š¯ õ篚ÏÚ õý¯õ°¥š¡ b)š š õñ õݯŠÎ˜ šýŠ õ¡¯Š¯ õý¯õ°¥š¡ c)ššŠ a)š ŠÑÚ˜š Š¿ÚÇ Úõñ ŠšÏš¿´ŠÀ Š¯ ŠšÏšŠšš õç¯šÏ õ¯š š¯´šÇõ¯ ŠÚŠõ° šŠÊ.
õݯŠÎ˜ šýŠŠ° õç¯šÏ õ¯ õݯŠÎ˜š õç¯šÏ ŠÇ Š°ŠšÝš š Šš š¥ŠÀ Úš¡Úõ¡¯ šÚš˜ Table 3õ°¥ õ¯šÇ Davies-Bouldin šÏÚŠË¥ ÚšˋÚšŠÊ. Úš¯šÊŠŠËÇÚ õݯŠÎ˜š õ¡¯Š¯Ú õ篚ÏÚ õý¯õ°¥š šÏÚŠ š§ 20š¥ŠÀš 5.8š¡ ŠÊšÇŠÇŠ₤¿ Úš šÚ, õñ¡ŠÎ˜õ° 6.1š¡ šŠÀšÇ õݯŠÎ˜ šýŠš šÚ õ篚ÏÚ õý¯õ°¥ õ¯õ¯š Š¿ÚÇ ŠÏÊš¯ ŠŠÊ. šÇŠ Fig. 4šš šõ¯ÚÚ õݯŠÎ˜ šýŠŠ° õ篚Ϛ Šš Ú¿šÝŠ° ŠÑÚ˜šš, Úš¯šÊŠŠËÇÚ õݯŠÎ˜ õ¡¯Š¯ õ篚Ϛ Š¿ÚÇ ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜ Š¯ š õñ õݯŠÎ˜ šýŠ õ¡¯Š¯ õ篚Ϛš Ú¿Ú õç¯šÏ õ¯ š¯´šÇõ¯ ŠŠŠ˜šÏŠÊŠ ŠÑšõ°¥ š¥õÇŠŠ õý¯õ°¥šÇŠÊ.
ÚÙš õ¯ õݯŠÎ˜ šýŠš šÊš š š¡ š šˋšÝš õñ¡ õ¯š¿õ¯ ŠÊšÚ š¡ÀŠˋÇšš šÂ
Úˋš š¥ŠÀ Úõ¯ŠšÇš¥ Ú õýšÇŠÊ. õ篚Ϛ šÏš š Šš š¥ŠÀ ŠÚŠÇŠ Davies-Bouldin šÏÚššŠ ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜ õ¡¯Š¯š õ篚ÏÚ õý¯õ°¥õ¯ šŠÀšÇ õݯŠÎ˜ šýŠŠ°ÇŠÊ õñ¥šÚõý š¯š¡ÚŠÊ. õñ¡Š˜Š ŠÏÊÚ¡ŠÎٚʊ˥ õ°š¯ÚŠ Š¯ ššŠ š¯š¯ šõ¯ššŠ šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ šýŠõ¯ 2 ŠÑ šÇš Ú´š´š šš Úš¡ÚšŠÊ. šÊš š Š¯ ÚÙš Š¯šÇÚ¯õ¯ ŠšˋŠ šõ°šÇ Š¯šÇÚ¯šš õ¯šÚŠÊŠˋÇ, õñ¡ŠÎ˜õ° Š¯šÇÚ¯õ¯ Šš Š´š Š¯Š¥ šŠÀ õ¯š õݯŠÎ˜ŠË¥ õ°š¯ÚÇš¥ Ú ÚÙš ŠÊšÇ ŠšÇŠõý Š´š õ¯šÚŠÊŠˋÇ š õñ õݯŠÎ˜ šýŠš õ°š¯ Ú´š´šÝš ŠšÝ õ¯š¿õ¯ šŠÊ. Š¯Š¥š Š°¡ š¯õ瘚š õ¯Š¯Ú šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ š¡Àš Š¯ˋŠýŠÀ š š¯š¯ŠšÇ ŠÏš ŠÊšÇŠÇŠ₤¿ Úš šÚ õݯŠÎ˜ õ¡¯Š¯š Š¯ˋŠýŠÀ õ°¥ Š¿ŠÝÚ ššÊš ÚÙš õ篚ÏÚ õý¯õ°¥ŠË¥ ŠšÑÚŠˋÇšŠ, š¯š¯ šš Ú´š´šÝš ÚŠ°ÇÚšŠÊŠ š šš šÊš š õ¯š¿õ¯ ŠŠÊõ° Ú š šŠÊ.
6. õý¯ ŠÀ
Š°¡ š¯õ瘊 ÚÙš Š¯ š Š¯ Ú¿šÝš š Ú´Úõý Š¯šÚ ÚÙš õ¯ õݯŠÎ˜ šýŠš šÇŠË¥ õ¡¯Š¯š¥ŠÀ Ú ÚÙš õ篚ÏÚ Š¯ˋŠýŠÀ šÇ õçÙŠÇ š¯š ÚÇšÙ Úõý§ššš ÚÇš šš šŠ¿šÊ Š¯š š õ¡¯š˜Ú š šŠÊŠ š š š¯ˋšÚš˜, šÇš ŠÑšÚ šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ š šÚšŠÊ. šÇšÇš š õñ šýŠš šÊš õ¯š¿ŠË¥ õýšÎÚõ¡¯ šÚš˜ šŠ´ÚÇš ÚÙŠÏš šÑš
Ú šÊš AIS ÚÙš Š¯šÇÚ¯š Š°Úˋ õ篚ÏÚ šõ° ŠÎ˜šÎš ÚšˋÚš˜ ÚÙš õ篚ÏÚ õý¯õ°¥ŠË¥ šõ¯ÚÚõ° š Šš š¥ŠÀ Úõ¯ÚŠ ŠÝ š˜Ú õ¡¯šÀÇ ÚÙš õ¯ õݯŠÎ˜ šýŠšš Š¿õç ŠÑšš ŠÊõ¯š š¥ŠÀ šÚÚšŠÊ. Š°¡ š¯õ瘚š š šÚ š õñ šýŠŠ š Úçš š¥ŠÀ šš¿ šõ°šÇ õ¯š šÏŠÎ˜š š š˜ŠŠË¥ š¡Àš ÚŠ Š¯ ÚšˋŠŠ Úš¯šÊŠŠËÇÚ õݯŠÎ˜š Š ÚÙš õ¯š ŠšÏšŠ Ëš Úõñ õ¯š š¯´šÇ, õñ¡ŠÎ˜õ° ŠšÏš¿´ŠÀš ŠÑš¯ õ¯š š¯´šÇŠË¥ õ¯šÊÚˋÚš˜ šÊõ°ŠšŠÊ. šÊš ÚÙš Š¯šÇÚ¯ŠË¥ ÚšˋÚ Š¿õç ŠÑš õý¯õ°¥, õ¯Š¯Ú šŠÀšÇ õݯŠÎ˜ šýŠŠË¥ ÚšˋÚ ÚÙš õ篚ÏÚ õý¯õ°¥õ¯ õ¡¯šÀÇ šýŠš Š¿ÚÇ ÚÙš õ¯ šÏŠÎ˜š šš¿š š¯´šÇŠ ŠšÏšŠ Š¯ ŠšÏš¿´ŠÀ ŠÝ š Š¯ õݯŠ Ú¿šÝš ŠÑÚ˜ š¯´šÇŠË¥ Š¿šñÚõݯŠ õñ¡ šÇšš ššÊš¥ŠÀ š õçÚõý Š¯šÚõ° ššš Š¯šÇÚ¯ šõ¯ÚŠÀš´ Úš¡ÚšŠÊ. š Šš š¥ŠÀŠ õç¯šÏ õ¯ ŠŠ õç¯šÏ ŠÇ Š°Šš õ¡¯šÊš¥ŠÀ õ篚ÏÚš šÏš Úõ¯ÚŠ Davies-Bouldin šÏÚŠË¥ õ¡¯šÊš¥ŠÀ, ŠšÝ š¯šÚõݯŠ Š¿šñÚ ššÊš õ¡¯ŠÀÚ ÚÚ¡, õ°š¯ Ú´š´šÝššŠ Ú¿Ú š¯šÚ´š Š°ÇšŠÊ.
Š°¡ š¯õ瘚š õ° šÚ ÚÙš õ¯ õݯŠÎ˜ šýŠŠ ÚÙš õ¯ šÏŠÎ˜š š š˜ŠŠ¢ šŠŠ¥ ÚÙš š Šš Ú¿šÝš Ú˜õÇš š¥ŠÀ Š¯šÚšŠÊ. šÇ šýŠŠË¥ õ¡¯Š¯š¥ŠÀ ÚÙš õ篚ÏÚŠË¥ š šˋÚŠÊŠˋÇ, ŠÊŠš Š°çšÀÚ ÚÙš Š¯šÇÚ¯ŠË¥ ÚÙš š šÏŠÎ˜š šš¿Š¢ šŠŠ¥ š Š¯š Šš Ú¿šÝõ¿šÏ õ° Š ÊÚ š õçÚ ÚÙš õ篚ϊʊÀ šš§Ú š šš¥Šˋ¯, õ¯ ÚÙš õç¯šÏ ŠÇšš ŠÊŠË¡ ÚÙš ŠÊõ°¥š õݯŠÎ˜õ¯ šçšš¡ ÚÙš š õç¯šÏ ŠÚ ÚÙš š¥ŠÀ šÑšÑÚ š šš õýšÇŠÊ. ŠÊšš š Š¯šÇ Šˆ¯Š Ê Ú¥šÀÚ š¯š ÚÇšÙ ÚÇšõçÚçõÇš šŠ¿šÊš ŠÑŠÇš šÈ¥Š šÚˋšš, š Š¯õ°¥ Úš˜ ÚÙš š Šš Ú¿šÝŠ°ŠÀ õ¯šË š š˜Ú ŠÚ ÚÙš š š šÚ š õ°çÚŠÊŠˋÇ, ÚÇš˜ šš õNJΘ š
Š˜Çš ŠÑÚŠË¥ õý§õ¯Ú Š¢ŠÏ šŠŠ¥ Š¯šÇÚ¯š šÚÇ ÚÇš˜ šš šÇ Š°ÇšËŠ ÚÙš š¥ŠÀ š Š¯ŠÊš š ŠÚ´š¥ŠÀš´ ÚÇššš š õ¡¯š˜Ú š šš õýšÇŠÊ.
šŠÀšÇ ÚÙš õ¯ õݯŠÎ˜ŠË¥ šÊšÎÚõ¡¯ šÚš˜ Š°¡ Š
¥Š˜¡ššŠ ŠˆˋÚ˜, õÇš ŠÝ Š õ¯šÏ ÚÙŠÏš šŠÚ AIS ÚÙš Š¯šÇÚ¯ŠÏš ÚšˋÚšš¥Š, ÚËÚ š¯õ瘚šŠ Š°ÇŠÊ ŠÊšÚ šÊÚ šÀ¯õÝÇŠÊš šÊõ°Úš˜ õçÙŠÇ ÚÇšÙššš Š°ÇÚ¡š š¡ š Ú´šÝš š
šÎÚÇš¥ Ú õýšÇŠÊ. šš¡Š˜ š Š¯ šš¿, ŠšÏšŠ Ë Š¯ ŠšÏšŠ š Š°Ç š¡šŠ õ¡¯š, šÀ¯š ŠÝ ÚÇš Úõý§ Š°šŠË¥ šÑõ¯ŠÀ õ° Š ÊÚ ÚÙš õ¯ õ篚ÏÚ õý¯õ°¥ŠË¥ ŠÑšÚŠÊŠˋÇ õ¯Š¯Š š õñ õݯŠÎ˜ šýŠõ¯ ŠšÝ š šš š¡ ÚÇš šš šŠ¿šÊ õç˜Úš õ¡¯š˜Ú š šš õýšÇŠÊ.
 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






