

ņä£ ļĪĀ
ņĄ£ĻĘ╝ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØś ņÖäņĀä ĒåĄĒĢ®ņØä ņ£ä ĒĢ┤ ņŗ£ņŖżĒģ£ ņäżĻ│ä ļ░Å Ļ░£ļ░£ņØ┤ ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż. ņØ┤ļŖö ņ╗©ĒģīņØ┤ļäłĒä░ļ»Ė ļäÉņØś ņĢ╝ļō£ ņ×æņŚģ ĒÜ©ņ£©ņä▒ņØä ļåÆņØ┤ļŖö ļŹ░ ņ¦æņżæ ĒĢĀ ņłś ņ׳Ļ│Ā ļŗżļźĖ ņ╗© ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśü ĒöäļĪ£ņäĖņŖżņÖĆ ĒåĄĒĢ®ņØ┤ ņē¼ņøīņ¦äļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉņŚÉņä£ ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØĆ Ļ│ĀĻ░ØņŚÉĻ▓ī ļŹö ļéśņØĆ ņä£ļ╣äņŖżļź╝ ņĀ£Ļ│ĄĒĢś Ļ│Ā ņłśņØĄņä▒ņØä Ē¢źņāüņŗ£ĒéżļŖö ļŹ░ ĒĢäņłśņĀüņØ┤ļŗż. ņ┤łļīĆĒśĢ ņäĀļ░ĢņØ┤ ņ╗©Ēģī ņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ņĀæņĢł ņ”ØĻ░ĆļĪ£ ņĢ╝ļō£ņŚÉņä£ ņ▓śļ”¼ĒĢśļŖö ņ╗©ĒģīņØ┤ļäł ļ¼╝ļ¤ē ņØś ĻĖēņ”ØņØä ņ┤łļלĒĢśņŚ¼ ņĢ╝ņĀüņן ņÜ┤ņśüņØĆ ļŹöņÜ▒ ņ¢┤ļĀżņøīņĪīņ£╝ļ®░ ņ╗©ĒģīņØ┤ ļäł ņ×æņŚģņ▓śļ”¼ ņāØņé░ņä▒ Ē¢źņāüņØ┤ ņÜöĻĄ¼ļÉśĻ│Ā ņ׳ļŗż. ņØ┤ļ¤░ ņČöņäĖņŚÉ ļ░£ļ¦× ņČ░ ļ¦ÄņØĆ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉļōżņØ┤ Ēä░ļ»ĖļäÉ ņÜ┤ņśüņØś ļ¬©ļōĀ ļŗ©ņØ╝ ĒöäļĪ£ņäĖ ņŖżļź╝ ņ×ÉļÅÖĒÖöĒĢśļĀżļŖö ņĢ╝ņŗ¼ ņ░¼ Ļ│äĒÜŹņØä ņżĆļ╣äĒĢśĻ│Ā ņ׳ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņØś Ēśäņ×¼ ņ×ÉļÅÖĒÖö ĻĖ░ņłĀņØĆ ņÖäņĀäĒĢ£ ņä▒ņłÖ ļŗ©Ļ│äĻ░Ć ņĢäļŗī ņä▒ņן ļŗ©Ļ│äņŚÉ ņ׳ļŗż. ņØ┤Ļ▓āņØ┤ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņāłļĪ£ņÜ┤ ņĄ£ņ▓©ļŗ© ĻĖ░ņłĀņØś ļÅäņ×ģņØä Ļ│ĀļĀżĒĢśĻ│Ā ņÜ┤ņśü ĒöäļĪ£ņäĖņŖżļź╝ ļ│ĆĻ▓Į ĒĢśņŚ¼ ņłśņØĄņä▒ņØä Ļ░£ņäĀĒĢśĻĖ░ ņ£äĒĢ£ ņØ┤ņ£Ā ņżæ ĒĢśļéśĻ░Ć ļÉśĻ│Ā ņ׳ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśü ņ▓┤ņĀ£ļŖö Ļ│äĒÜŹ ņłśļ”Į, ņŖżņ╝Ćņżäļ¦ü ļ░Å ņ×Éņé░ ĒåĄņĀ£ļź╝ ņ¦ĆņøÉĒĢśļ»ĆļĪ£ ĒÜ©ņ£©ņĀüņØ┤Ļ│Ā ņāØņé░ņĀüņØĖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ ņśüņØä ņ£äĒĢ┤ ĒĢäņłśņĀüņØ┤ļØ╝Ļ│Ā ĒĢĀ ņłś ņ׳ļŗż. ļÅÖņŗ£ņŚÉ, ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņ×ÉļŖö ĻĖ░ņĪ┤ņØś ņłśļÅÖ Ļ│äĒÜŹ ļ░Å ļ░░ņĀĢ ņŗżĒ¢ēņ£╝ļĪ£ ņØĖĒĢ£ ļ¼ĖņĀ£ļź╝ ĒĢ┤ Ļ▓░ĒĢśĻ│Ā ņśżļŖśļéĀņØś ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśü ņŗżĒ¢ēņØä ņČ®ņĪ▒ņŗ£ĒéżĻĖ░ ņ£ä ĒĢ┤ ņä£ļ╣äņŖż ņĢĮĻ┤ĆņŚÉ ļŹö ļ¦ÄņØĆ ĻĖ░ļŖźņØä ņÜöĻĄ¼ĒĢśĻ│Ā ņ׳ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņ×ÉĻ░Ć ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻĖ░ļź╝ ņøÉĒĢśļŖö ļ░®ņŗØ ņØĆ Terminal Operating System(TOS) ņ×Éņ▓┤ņØś ĒöäļĪ£ņäĖņŖż ņ×ÉļÅÖ ĒÖöņÖĆ TOS ņĀ£Ļ│Ą ņŚģņ▓┤ļŖö ĻĖ░ļŖźņØä Ļ░£ņäĀĒĢśļŖö ļŹ░ ļ¦ÄņØĆ ļģĖļĀźņØä ĻĖ░ņÜĖ ņØ┤Ļ│Ā ņ׳ņ£╝ļ®░ ņłśļ¦ÄņØĆ ļ░£ņĀäņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦ĆĻ│Ā ņ׳ļŗż. ĻĖ░ļŖź ņżæņŚÉļŖö ņ×É ļÅÖ Ļ│äĒÜŹ, ņ×ÉļÅÖ ļ░£ņåĪ, ņ×ÉļÅÖ ņ×¼ņ▓śļ”¼ ļō▒ņØ┤ ņ׳ļŗż. ņØ┤ ĻĖ░ļŖź ņżæņŚÉ ņ╗© ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņ×ÉĻ░Ć Ļ░¢Ļ│Ā ņŗČņ¢┤ ĒĢśļŖö ļŗżļźĖ ņ£ĀĒśĢņØś ĒöäļĪ£ņäĖņŖż ņ×ÉļÅÖĒÖöļŖö Auto Container Handling ņØ┤ļŗż. ņÖ£ļāÉĒĢśļ®┤ Container Handling Equipment(CHE) ļ░Å ņ╗©ĒģīņØ┤ļäł ņ£äņ╣śĻ░Ć ņóģņóģ ņŗĀļó░ĒĢĀ ņłś ņŚåĻ▒░ļéś ļśÉļŖö ņĀĢļ│┤Ļ░Ć ļŖ”ņØĆ Ļ▓ĮņÜ░ ĒåĄņĀ£ņŗżņØ┤ļéś Vehicle Mounted Terminal(VMT)ļź╝ ĒåĄĒĢ┤ ņé¼ņÜ®ņ×É ņ×ģļĀźņŚÉ ņØśĒĢ┤ ņłśļÅÖņ£╝ ļĪ£ ņłśņ¦æļÉśĻ│Ā ņ׳ļŗż. ņØ┤Ļ▓āņØĆ TOSĻ░Ć Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖö ņ×ÉļÅÖĒÖö ĻĖ░ļŖźņØś ĒĢ£Ļ░Ćņ¦ĆļĪ£ CHEņØś ļ│┤Ļ│ĀļÉ£ ņ£äņ╣śņÖĆ ņŗżņĀ£ ņ£äņ╣śĻ░Ć ļŗżļźĖ ņ£äņ╣śņŚÉ ņ׳ ņØä ņłś ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņ×É ņ×ģņןņŚÉņä£ļŖö ņ╗©ĒģīņØ┤ ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņØś ņŚ¼ļ¤¼ Ļ░Ćņ¦Ć ļ¼ĖņĀ£ ņżæņŚÉ ĒĢśļéśņØś ņŻ╝ņÜö ņøÉņØĖņØ┤ ļÉś Ļ│Ā ņ׳ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņŗ£ņŖżĒģ£ņØĆ ĻĘĖ ņ×Éņ▓┤ļĪ£ ņŚģļ¼┤ļź╝ ņ▓śļ”¼ ĒĢĀ ņłś ņŚåĻĖ░ ļĢīļ¼ĖņŚÉ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśüņ×É ņ×ģņןņŚÉņä£ļŖö ņ×ÉļÅÖĒÖö CHE ļśÉļŖö ļÅģļ”ĮņĀü ņ×ÉļÅÖ ĒĢĖļō£ņśżĒöä ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢśņŚ¼ ĒĢĖļō£ņśż Ēöä ĒöäļĪ£ņäĖņŖżņŚÉ ņ×æņŚģņ×ÉņØś Ļ░£ņ×ģņØä ņĄ£ņåīĒÖöĒĢśĻ│Ā ņ׳ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉ Ļ░ĆļÅÖņØä ļ│┤ļŗż ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ņÜ┤ņśüĒĢśĻ│Ā Ļ▓░Ļ│╝ņĀüņ£╝ļĪ£ ņāØņé░ņä▒ņØä ļåÆņØ┤ļĀżļ®┤ CHEņØś ņŗżņŗ£Ļ░ä ņ£äņ╣śņÖĆ ņāüĒā£ĒÖĢņØĖņØ┤ ņÜöĻĄ¼ļÉśĻ│Ā ņ׳ļŗż. ņØ┤ņŚÉ Differential Global Positioning System(DGPS)ļź╝ ņØ┤ņÜ® ĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņ×ÉļÅÖĒÖö ņןļ╣äņØś ņŗżņŗ£Ļ░ä ņ£äņ╣śņÖĆ ņāüĒā£ņØä ĒÖĢ ņØĖņØ┤ Ļ░ĆļŖźĒĢśļŗż. DGPSļŖö ĒĢŁĻ│Ą ņé░ņŚģņØä ļ╣äļĪ» ļÅäļĪ£ ņ░©ļ¤ē, ĒĢ┤ņāü ņן ļ╣ä, ņ×Éņé░ņØś ņŻ╝ņÜö ņČöņĀü ļ░Å ņ£äņ╣ś ĒīīņĢģ ĻĖ░ņłĀņŚÉ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŗż. ņ╗© ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņ¦ĆņŚŁņŚÉņä£ Transfer Crane(TC), Gantry Crane(GC), Reach Stacker(RS), ņĢ╝ļō£ ĒŖĖļ×ÖĒä░ ļō▒Ļ│╝ Ļ░ÖņØĆ ņØ┤ņåĪ ņןļ╣äļź╝ ņČöņĀüĒĢśĻ│Ā ņāüĒā£ļź╝ ĒīīņĢģĒĢśļŖö ņŻ╝ņÜö ļ░®ļ▓Ģņ£╝ļĪ£ ņ▒äĒāØļÉśĻ│Ā Ļ░ü Ļ┤æ ļ░øĻ│Ā ņ׳ļŗż. Ēśäņ×¼ ĻĖ░ņĪ┤ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö CCTVļź╝ ņØ┤ ņÜ®ĒĢśņŚ¼ ņĢ╝ļō£ ņ×æņŚģ ĒśäĒÖ® ļ░Å ņØ┤ņåĪņןļ╣äņØś ņ×æņŚģņØä ļ¬©ļŗłĒä░ļ¦üĒĢśĻ│Ā ņ׳ļŗż. CCTVļŖö Container Handling ņ×æņŚģņØä ļ¬©ļŗłĒä░ļ¦üĒĢśĻĖ░ ņ£ä ĒĢ┤ņä£ļŖö Ļ▒░ņØś ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņĢ╝ļō£ ņ×æņŚģĒśäĒÖ®ņØä ļ¬©ļŗłĒä░ļ¦ü ņłśĒ¢ēĒĢśļŖö ņ×æņŚģņØś ļ¬©ļŗłĒä░ļ¦ü ļÅäĻĄ¼ņśĆļŗż. ĻĘĖļ¤¼ļéś CCTVļĪ£ ļ¬©ļŗłĒä░ļ¦üĒĢśļŖö Ļ▓ā ņØĆ ņŗ£Ļ░ä ņåīļ¬©ņĀü ņØ╝ļ┐Éļ¦ī ņĢäļŗłļØ╝ ļ░öņü£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ļīĆņāü Ļ░Øņ▓┤ļź╝ ņŗØļ│äĒĢśļŖö Ļ▓āņØ┤ Ļ▒░ņØś ļČłĻ░ĆļŖźĒĢśļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņÜ┤ņśü ņ×ÉļŖö CHE ļ░Å ņ╗©ĒģīņØ┤ļäłņØś ņ£äņ╣ś ļ░Å ņ×æņŚģ ņāüĒā£ņÖĆ Ļ░ÖņØĆ ņ╗©ĒģīņØ┤ļäł ņ×æņŚģņØä ļ¬©ļŗłĒä░ļ¦üĒĢśĻĖ░ņ£äĒĢ£ ņĀüņĀłĒĢ£ Ļ░Ćņāü ĒÖśĻ▓ĮņØä ņøÉĒĢśĻ│Ā ņ׳ņŚłļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņ£äņ╣ś ņČöņĀü ņŗ£ņŖżĒģ£ņØä ņé¼ņÜ®ĒĢśņ¦Ć ņĢŖĻ│Ā Ēä░ ļ»ĖļäÉ ņÜ┤ņśü ņ▓┤ņĀ£ļź╝ ņé¼ņÜ®ĒĢśļŖö ļīĆļČĆļČäņØś ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö ņé¼ņÜ®ņ×É ņ×æņŚģņØä ĒåĄĒĢ┤ ņĀĢļ│┤Ļ░Ć ņłśļÅÖņ£╝ļĪ£ ņłśņ¦æļÉśļ»ĆļĪ£ ņ╗©ĒģīņØ┤ļäł ļ░Å CHE ņ£äņ╣śĻ░Ć ņŗĀļó░ņä▒ņØ┤ ļé«Ļ▒░ļéś ņŗżņŗ£Ļ░äņ£╝ļĪ£ ļ░śņśüļÉśļŖö ņŗ£Ļ░äņØ┤ ļŖ”ņ¢┤ ņØ┤ņŚÉ ļ¼ĖņĀ£ ĒĢ┤Ļ▓░ņØä ņøÉĒĢśĻ│Ā ņ׳ļŗż.
ļ│Ė ņŚ░ĻĄ¼ļŖö ĻĄŁļé┤ Ļ┤æņ¢æ(A) ņłśļÅÖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉĻ│╝ ĻĄŁņÖĖ ņżæļÅÖ (A) ņ×ÉļÅÖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØä ņŗżņĀ£ ņÜ┤ņśüĻ┤Ćļ”¼ĒĢśĻ│Ā ņ׳ļŖö Ļ││ņØä ņŚ░ ĻĄ¼ļīĆņāüņ¦ĆļĪ£ ņäĀņĀĢĒĢśņśĆļŗż. ĻĄŁļé┤ Ļ┤æņ¢æ(A) ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØĆ ņØ┤ņåĪ ņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØ┤ ļ»Ėņäżņ╣śļÉśņ¢┤ ņ׳ņ£╝ļ®░ ĻĄŁņÖĖ ņżæļÅÖ(A) ņ╗©Ēģī ņØ┤ļäłĒä░ļ»ĖļäÉņØĆ DGPSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØ┤ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö Ļ││ņ£╝ļĪ£ DGPSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņØ┤ņåĪņןļ╣äļź╝ ņŗżņŗ£Ļ░ä ņ£äņ╣śņÖĆ ņāüĒā£ļź╝ ĒÖĢņØĖĒĢśĻ│Ā ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ņŗżņĀ£ Ļ░£ļ░£, ņĀüņÜ®, ņÜ┤ ņśüĒĢśļŖö Ļ││ņØ┤ļŗż.
ņłśļÅÖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉĻ│╝ ņ×ÉļÅÖĒÖö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£ņØś ĻĄ¼ņä▒ņÜöņåīņÖĆ ĻĖ░ļŖźņØä ņé┤ĒÄ┤ļ│┤Ļ│Ā ņłśļÅÖ ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£ Ļ│╝ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ┤ņä£ ļ╣äĻĄÉ ļČäņäØ ļ░Å ņĀüņÜ®ļ░®ņĢł ņØä ņĀ£ņŗ£ĒĢśĻ│Ā ņŗ£Ļ░äļŗ╣ ņ╗©ĒģīņØ┤ļäł ņāØņé░ņä▒ ļ░Å Ļ▓īņØ┤ĒŖĖ Ēä┤ ņŗ£Ļ░äņØä ļ╣ä ĻĄÉ ļČäņäØĒĢśļŖö Ļ▓āņØä ļ¬®ņĀüņ£╝ļĪ£ ĒĢ£ļŗż.
ņŚ░ĻĄ¼ļīĆņāü ņŗ£ņäż ĒśäĒÖ®ņØĆ Table 1ņŚÉņä£ ņé┤ĒÄ┤ļ│┤ļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż. ļ│Ė ņŚ░ĻĄ¼ņØś ņŚ░ĻĄ¼ļīĆņāüņØĖ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖöĻ░Ć ļ»Ėņäżņ╣śļÉśņ¢┤ ņ׳ļŖö Ļ┤æ ņ¢æņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉĻ│╝ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖöĻ░Ć ņäżņ╣ś ļÉśņ¢┤ņ׳ļŖö ĻĄŁņÖĖ ņżæļÅÖ(A) ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØĆ ĻĄŁļé┤ņÖĖ ĒĢŁļ¦īņé░ņŚģņŚÉņä£ ņ╗©ĒģīņØ┤ļäł ļ¼╝ ļÅÖļ¤ēņØ┤ ņ¦ĆņåŹņĀüņØĖ ņä▒ņןņØä ļ│┤ņØ┤Ļ│Ā ņ׳ļŖö ĻĄŁļé┤ņÖĖņØś ļīĆĒæ£ņĀüņØĖ ņ╗©Ēģī ņØ┤ļäłĒä░ļ»ĖļäÉņØ┤ļŗż.
ņäĀĒ¢ēņŚ░ĻĄ¼ Ļ│Āņ░░
ņäĖĻ│ä ņŻ╝ņÜö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉļōżņØĆ ņżæņŗ¼ĒĢŁļ¦īņ£╝ļĪ£ ņä▒ņןĒĢśĻĖ░ ņ£ä ĒĢ┤ ņ╣śņŚ┤ĒĢ£ Ļ▓Įņ¤ü ņåŹņŚÉņä£ ņÜ░ņ£äļź╝ ņäĀņĀÉĒĢśĻĖ░ ņ£äĒĢ┤ ņ×ÉļÅÖĒÖö ņŗ£ņäżņØä ĒÖĢņČ®ĒĢśļŖöļŹ░ ļģĖļĀźĒĢśĻ│Ā ņ׳ļŗż. ļśÉĒĢ£, ņ╗©ĒģīņØ┤ļäł ļ¼╝ļÅÖļ¤ēņØ┤ ĻŠĖņżĆĒ׳ ņ”ØĻ░Ć ņČöņäĖļź╝ ņČ®ņĪ▒ņŗ£Ēé¼ ņłś ņŚåĻĖ░ ļĢīļ¼ĖņŚÉ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņ×ÉļÅÖ ĒÖö ņŗ£ņŖżĒģ£ ņŗ£ņäż ĒÖĢņČ®ņØĆ ĒĢäņŚ░ņĀüņØ┤ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ļ░£ņāØ ļÉśļŖö ļ╣äņÜ®ņØ┤ ņĀäņ▓┤ ļ¼╝ļÅÖļ¤ēņŚÉ ļ░£ņāØļÉśļŖö ļ╣äņÜ®ņØś 30’╝ģļź╝ ņ░©ņ¦ĆĒĢśĻ│Ā ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ņäĖĻ│ä ņŻ╝ņÜö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö ņĀÉņ░© ļåÆņĢäņ¦ĆļŖö ņØĖĻ▒┤ļ╣äņÖĆ ļČĆņĪ▒ĒĢ£ ļģĖļÅÖļĀź ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻ│Ā ņ×æņŚģ ļŖźļźĀņØä ĻĘ╣ļīĆĒÖö ĒĢśĻĖ░ ņ£äĒĢ£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņŗ£ņäżņØś ņ×ÉļÅÖĒÖöņŚÉ ļģĖļĀźņØä ĻĖ░ņÜĖņØ┤Ļ│Ā ņ׳ļŗż(Hong and Lee, 2001). ņØ┤ņŚÉ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ Ļ┤ĆļĀ©ļÉ£ ļ¼ĖĒŚī ņØä ņé┤ĒÄ┤ļ│┤ļ®┤ Ēü¼Ļ▓ī Gate ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼, ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼, ļ│ĖņäĀ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ ļō▒ņ£╝ļĪ£ ļīĆļ│äļÉ£ļŗż.
2.1 Gate ņ×ÉļÅÖĒÖö
Ļ▓īņØ┤ĒŖĖļŖö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņ╗©ĒģīņØ┤ļäłĻ░Ć ļ░śņ×ģ, ļ░śņČ£ņØ┤ ņŗ£ ņ×æĒĢśļŖö ņןņåīļĪ£ņä£ ņ╗©ĒģīņØ┤ļäł ņĀĢļ│┤ņØś ņŗ£ņ×æņĀÉĻ│╝ ņóģņ░®ņĀÉņØ┤ ļÉśļŖö Ļ▓ī ņØ┤ĒŖĖņØś ņ×ÉļÅÖĒÖö ļÅäņ×ģļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņé┤ĒÄ┤ļ│┤Ļ│Āņ×É ĒĢ£ļŗż.
ĒĢŁļ¦īņŗ£ņäż ņżæņŚÉņä£ļÅä ĒÖöļ¼╝ņØ┤ ļ░£ņāØļÉśĻ│Ā ņåīļ®ĖļÉśļŖö ņןņåīļĪ£ņä£ ņĀĢ ļ│┤ņØś ņŗ£ņ×æņĀÉĻ│╝ ņóģņ░®ņĀÉņØ┤ ļÉśļŖö Ļ▓īņØ┤ĒŖĖņØś ņ×ÉļÅÖĒÖöĻ░Ć ļ¼┤ņŚćļ│┤ļŗżļÅä ņżæņÜöĒĢ£ ņØ┤ņŖłļĪ£ ļīĆļæÉļÉśĻ│Ā ņ׳ļŗż. ņØ┤ņŚÉ ĒĢŁļ¦īņØś Ļ▓īņØ┤ĒŖĖļź╝ ņĄ£ņĀüņ£╝ ļĪ£ ņ×ÉļÅÖĒÖöĒĢśļŖöļŹ░ ņĀüĒĢ®ĒĢ£ ņäżĻ│ä ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśĻ│Āņ×É ĒĢśņśĆļŗż. ļśÉ ĒĢ£, Ļ▓īņØ┤ĒŖĖņØś ņĀüņĀĢ ĻĘ£ļ¬©ļź╝ ņé░ņĀĢĒĢśĻ│Ā, Ļ▓īņØ┤ĒŖĖ ņÜ┤ņśüļ░®ņŗØņØä ļ╣äĻĄÉ ĒĢśņŚ¼ ņĄ£ņĀüņØś Ļ▓īņØ┤ĒŖĖ ņ×ÉļÅÖĒÖö ņÜ┤ņśü ļ░®ņŗØņØä ņĀ£ņĢłĒĢśņśĆļŗż(Hong and Jung, 2003). ņ£Āļ╣äņ┐╝Ēä░ņŖżņØś ĒĢĄņŗ¼ ĻĖ░ņłĀļĪ£ ļīĆļæÉļÉśĻ│Ā ņ׳ļŖö Radio Frequency Identification(RFID)ļź╝ ņØ┤ņÜ®ĒĢ£ ĒĢŁļ¦ī ņ╗©ĒģīņØ┤ ļäł Ļ┤Ćļ”¼ņŗ£ņŖżĒģ£ņØä Ļ░£ļ░£ĒĢśļŖöļŹ░ ļ¬®ņĀüņØ┤ ņ׳ņ£╝ļ®░ ņ╗©ĒģīņØ┤ļäł ņ×ÉļÅÖņŗØ ļ│äņØä ņ£äĒĢ┤ RFID ĻĖ░ņłĀņØä ĒÖ£ņÜ®ĒĢ£ ĒĢŁļ¦ī Ļ▓īņØ┤ĒŖĖ ņ×ÉļÅÖĒÖöĻĖ░ņłĀĻ│╝ Ļ▓ī ņØ┤ĒŖĖņÖĆņØś ĒåĄņŗĀ ļ░Å ņ╗©ĒģīņØ┤ļäłņØś ņ×ģņČ£Ļ│Ā ņ▓śļ”¼ļź╝ ņ£äĒĢ£ ņø╣ ĒöäļĪ£ĻĘĖ ļש ĻĖ░ņłĀ, ĻĘĖļ”¼Ļ│Ā ĒĢŁļ¦ī ļäżĒŖĖņøīĒü¼ Ēöīļ×½ĒÅ╝Ļ│╝ Ēü┤ļĀłņØĖ ļŗ©ļ¦ÉĻĖ░ļź╝ ņ£ä ĒĢ£ ļ¼┤ņäĀ ņ×äļ▓Āļööļō£ ļØ╝ņÜ░Ēä░ ĻĖ░ņłĀņØä ĻĖ░ļ░śņ£╝ļĪ£ ņäżĻ│ä ļ░Å ĻĄ¼Ēśä ĒĢśņśĆ ļŗż. RFIDļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ Ļ░£ļ░£ļÉ£ Ļ▓īņØ┤ĒŖĖ ņŗ£ņŖżĒģ£ņØĆ Ē¢źĒøä ņ¦ĆļŖźĒśĢ ĒĢŁļ¦īņØä Ē¢źĒĢ£ ĒĢŁļ¦ī ļ¼╝ļźś Ļ┤Ćļ”¼ ņŗ£ņŖżĒģ£ņØś ņŻ╝ņÜöņåīļĪ£ ĒÖ£ņÜ®ļÉĀ Ļ▓āņ£╝ ļĪ£ ņĀ£ņĢłĒĢśņśĆļŗż(No and Kim, 2006).
RFIDņÖĆ OCR(Optical Character Recognition) ĻĖ░ņłĀņØś ļō▒ņן ņ£╝ļĪ£ ņ×ÉļÅÖĒÖö Ļ▓īņØ┤ĒŖĖņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ Ļ┤Ćņŗ¼ņØ┤ ļåÆņĢäņ¦ĆĻ│Ā ņ׳ļŗż. RFIDņÖĆ OCRĻĖ░ņłĀņØä ļÅÖņŗ£ņŚÉ ņĀüņÜ®ĒĢ┤ ņØ┤ļōżņØ┤ Ļ░Ćņ¦ä ņןņĀÉņØä ĒÖ£ņÜ® ĒĢ£ RFID/OCR ĻĖ░ļ░śņØś ņ×ÉļÅÖĒÖö Ļ▓īņØ┤ĒŖĖņŗ£ņŖżĒģ£ņØä Ļ░£ļ░£ĒĢśĻ│Ā, ņØ┤ļź╝ ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉ Ļ▓īņØ┤ĒŖĖņŚÉ ņĀüņÜ®ĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉ Ļ▓īņØ┤ĒŖĖ ņØś ņØĖņŗØņŚģļ¼┤ļź╝ Ļ░£ņäĀņŗ£Ēé¼ ņłś ņ׳ļŖö ĒÜ©ņ£©ņĀüņØĖ Ļ▓īņØ┤ĒŖĖ ņÜ┤ņśü ņŗ£ņŖż Ēģ£ņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Choi et al., 2007). Ļ▓īņØ┤ĒŖĖ ņŗ£ņŖżĒģ£ņŚÉ RFID ĻĖ░ ņłĀņØä ņĀüņÜ®ĒĢśņŚ¼ ĻĄ¼ĒśäĒĢśĻ│Ā, ĒśäņןĒģīņŖżĒŖĖļź╝ ĒåĄĒĢ┤ ĻĖ░ņłĀņĀü ņŗżĒśäĻ░ĆļŖź ņä▒Ļ│╝ Ļ▓ĮņĀ£ņĀü ĒāĆļŗ╣ņä▒ņØä Ļ▓Ćņ”ØĒĢśĻ│Āņ×É ĒĢśņśĆļŗż. Ļ▓Ćņ”Øļ░®ļ▓ĢņØĆ ĻĄŁļé┤ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ Ļ▓īņØ┤ĒŖĖ ĒåĄĻ│╝ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ ĒśäĒÖ®ļČäņäØņØä ĒåĄĒĢ┤ ļ¼ĖņĀ£ņĀÉĻ│╝ Ļ░£ņäĀņĀÉņØä ņĀ£ņŗ£ĒĢśĻ│Ā, RFID ĻĖ░ņłĀņØä ņĀüņÜ®ĒĢ£ Ļ▓īņØ┤ĒŖĖ ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ĻĄ¼ĒśäĒĢśņŚ¼ Ēśäņן ĒģīņŖżĒŖĖļź╝ ĒåĄĒĢ┤ ņä▒ļŖźņØä ĒÅēĻ░ĆĒĢ© ņ£╝ļĪ£ņŹ© ĻĄŁļé┤ ĒĢŁļ¦īņØś Ļ▓Įņ¤üļĀź ņĀ£Ļ│Āļź╝ ņ£äĒĢ£ ņłśļŗ©ņ£╝ļĪ£ņä£ņØś Ļ░ĆļŖźņä▒ ņØä ņĀ£ņĢłĒĢśņśĆļŗż(Lee et al., 2006).
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ Ļ▓īņØ┤ĒŖĖ ņłśļÅÖņ▓śļ”¼ ļ░®ņŗØņØś ĒĢ£Ļ│äļź╝ ĻĘ╣ļ│Ą ĒĢ©Ļ│╝ ļÅÖņŗ£ņŚÉ ņ¦ĆņåŹņĀüņ£╝ļĪ£ ņÜ┤ņśüņĖĪļ®┤ņŚÉņä£ ļ░£ņāØĒĢśļŖö ļ╣äņÜ®ņØä ņżäņØ┤ ĻĖ░ ņ£äĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢśĻ│Ā ņ׳ļŗż. Ļ▓īņØ┤ĒŖĖ ļŹ░ļ»Ėņ¦Ć ņ╗©ĒģīņØ┤ļäł ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢśĻ▓ī ļÉśļ®┤ ņśüņāü ņĀĆņן ņŗ£ņŖżĒģ£ņŚÉ ņØśĒĢ£ ņ╗©ĒģīņØ┤ļäł Ļ┤Ćļ”¼Ļ░Ć Ļ░ĆļŖźĒĢśļŗż. ņ╗©ĒģīņØ┤ļäł ņåÉ ņāüņĀĢļ│┤Ļ░Ć ņŗ£ņŖżĒģ£ņŚÉ ņĀĆņןļÉśņ¢┤ ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ Ļ│ĀĻ░ØņØ┤ ļŹ░ļ»Ėņ¦Ć ņ╗©Ēģī ņØ┤ļäł ņ×ÉļŻīļź╝ ņÜöņ▓Ł ņŗ£ ņŗ£ņŖżĒģ£ņŚÉ ņĀĆņןļÉśņ¢┤ ņ׳ļŖö ļŹ░ļ»Ėņ¦Ć ņ╗©ĒģīņØ┤ ļäł ņśüņāüņØä Ļ▓ĆņāēĒĢśņŚ¼ ņ”ØĻ▒░ņ×ÉļŻī ņĀ£ņČ£ņØ┤ Ļ░ĆļŖźĒĢśĻ│Ā Ļ│ĀĻ░Øņ£╝ļĪ£ļČĆĒä░ ņØś Ēü┤ļĀłņ×ä ļīĆļ╣äĻ░Ć Ļ░ĆļŖźĒĢśļŗż. ļśÉĒĢ£, Ļ▓īņØ┤ĒŖĖ Ļ┤Ćļ”¼ ņØĖļĀź ņŚģļ¼┤ņØś ĒåĄĒĢ®ņ£╝ļĪ£ ņØĖļĀź Ļ░ÉņåīņÖĆ Ļ▓īņØ┤ĒŖĖ ļČĆĻĘ╝ ņĢłņĀäņé¼Ļ│Ā ņ£äĒŚśņØ┤ Ļ░ÉņåīĒĢ©ņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Cha and Noh, 2017).
2.2 ņĢ╝ļō£ ņ×ÉļÅÖĒÖö
ņĄ£ĻĘ╝ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ļ│ĆĒÖöĒĢśļŖö ĒĢ┤ņÜ┤ĒÖśĻ▓ĮņŚÉņä£ Ļ▓Įņ¤üņÜ░ņ£ä ļź╝ ņĀÉĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņ▓©ļŗ©ņןļ╣ä ļ░Å ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢś Ļ│Ā ņ׳ļŗż. ņØ┤ņŚÉ, Ļ▓īņØ┤ĒŖĖņÖĆ ņןņ╣śņן ņé¼ņØ┤ņŚÉņä£ņØś ļ░śņČ£ņ×ģ ņ×æņŚģ, ņĢł ļ▓ĮĻ│╝ ņןņ╣śņן ņé¼ņØ┤ņŚÉņä£ņØś ņ¢æņĀüĒĢś ņ×æņŚģ, ņןņ╣śņןļé┤ņŚÉņä£ņØś ĻĄ¼ļé┤ņØ┤ ņĀü ņ×æņŚģ, ņĢ╝ļō£ļé┤ ņ▓©ļŗ©ņןļ╣ä ĒÜ©ņ£©ņĀü ņÜ┤ņśü ļ░®ļ▓Ģ ļō▒ņØä ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ņ▓śļ”¼ĒĢśļŖö ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņןļ╣ä ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņé┤ĒÄ┤ļ│┤ Ļ│Āņ×É ĒĢ£ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĢ╝ļō£ņŚÉņä£ ļ¼┤ņØĖņ£╝ļĪ£ ĒĢśņŚŁņ×æņŚģņØä ņłśĒ¢ēĒĢśļŖö ņ×ÉļÅÖĒÖö Ēü¼ļĀłņØĖņŚÉņä£ ņŗĀņåŹĒĢśĻ│Ā ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ņ×æņŚģ ļīĆņāüņØĖ ņ╗©ĒģīņØ┤ ļäłĒÖöļ¼╝ņØś ņ╗¼ļ¤¼ ņśüņāü ņØ┤ļ»Ėņ¦Ćļé┤ņØś ņ╗©ĒģīņØ┤ļäłļ▓łĒśĖļź╝ ņØĖņŗØĒĢśļŖö ļ░® ļ▓ĢņŚÉ ļīĆĒĢśņŚ¼ ņĀ£ņŗ£ĒĢśņśĆļŗż(Hong, 2010). ļ¼╝ļźś ņןļ╣äņÖĆ ņ×ÉļÅÖĒÖö ņŗ£ ņŖżĒģ£ņØä ņŚ░Ļ▓░ņŗ£ĒéżļŖö ļ░®ļ▓ĢņØĆ ĻĖ░ņĪ┤ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö ņ╗©Ēģī ņØ┤ļäłĻ░Ć ņØ┤ļÅÖ ĒĢĀ ļĢī ņĀĢļ│┤ ĻĄÉĒÖśņØä 802.11 ļ¼┤ņäĀ ĻĘ£Ļ▓® ļ¦ØņØä ĻĄ¼ņä▒ĒĢś ņŚ¼ ļ¼┤ņ¦ĆĒ¢źņä▒, ņ¦ĆĒ¢źņä▒ ņĢłĒģīļéśļź╝ ņØ┤ņÜ®ĒĢśĻ▓ī ļÉśļŖöļŹ░ ņ╗©ĒģīņØ┤ļäł ņĀü ņ×¼ ļåÆņØ┤Ļ░Ć ļåÆņØĆ Ļ▓ĮņÜ░ ņé¼Ļ░üņ¦ĆņŚŁņØ┤ ļ░£ņāØĒĢśļ®░, ņŻ╝Ēīīņłś Channel(CH)ņØ┤ ĒĢ£ņĀĢļÉśņ¢┤ ņ׳ņ¢┤ ĒāĆ Ēä░ļ»ĖļäÉ Ēś╣ņØĆ ņØĖņĀæ ņ¦ĆņŚŁņŚÉņä£ ņŻ╝Ēīīņłś CHņØä ņé¼ņÜ®ĒĢĀ Ļ▓ĮņÜ░ņŚÉ ņżæņ▓®ļ¼ĖņĀ£Ļ░Ć ļ░£ņāØĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉ ņ×ÉļÅÖĒÖö ņןļ╣ä ņÜ┤ņśüņŚÉ ļ¦ēļīĆĒĢ£ ņśüĒ¢źņØä ļ»Ėņ╣śĻ│Ā ņ׳ļŗż. ņ×ÉļÅÖĒÖö ņןļ╣ä ĒÜ©ņ£©ņĀüņØĖ ņÜ┤ņśüņØä ņ£äĒĢ┤ņä£ Lņé¼ņŚÉņä£ ņĀ£Ļ│ĄĒĢ£ Long Term Evolution(LTE)ļ¦ØņØä ĻĄ¼ņä▒ĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņĢ╝ļō£ ņ×ÉļÅÖ ĒÖö ņןļ╣äļōżņØ┤ ņé¼Ļ░üņ¦ĆņŚŁĻ│╝ ņżæņ▓®ļ¼ĖņĀ£Ļ░Ć ļ░£ņāØ ĒĢśņ¦Ć ņĢŖĻ│Ā ļüŖĻ╣ĆņŚåņØ┤ ļŹ░ņØ┤Ēä░ļź╝ ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ņ▓śļ”¼ĒĢśļŖö ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Cha and Noh, 2016).
ņĄ£ĻĘ╝ ļ¼╝ļÅÖļ¤ēņØ┤ ĻĖēĻ▓®Ē׳ ņ”ØĻ░ĆļÉśņ¢┤ ļČĆļæÉņŚÉņä£ ņ▓śļ”¼ĒĢśņŚ¼ņĢ╝ĒĢĀ ņ╗© ĒģīņØ┤ļäł ņ¢æņØ┤ ļ¦ÄņØ┤ ņ”ØĻ░ĆļÉśņ¢┤ ļČĆļæÉņØś ņÜ┤ņÜ®ĒÜ©ņ£©ņØä ņ”ØĻ░Ćņŗ£ĒéżĻĖ░ ņ£ä ĒĢśņŚ¼ ņĢ╝ļō£ Ēü¼ļĀłņØĖņØś ņĀĢĒÖĢĒ׳ ņ£äņ╣ś Ļ▓ĆņČ£ņØ┤ ņāüļŗ╣Ē׳ ņżæņÜöĒĢ£ Ļ│╝ņĀ£ Ļ░Ć ļÉśņŚłļŗż. ņØ┤ņŚÉ, ņŚöņĮöļŹö ņČ£ļĀźĒÄäņŖżņÖĆ ņĀüņÖĖņäĀņä╝ņä£ļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ņĀĢĒÖĢĒĢśĻ│Ā ņŗĀņåŹĒĢśĻ▓ī Ēü¼ļĀłņØĖņØś ņĀłļīĆņ£äņ╣śļź╝ ņĖĪņĀĢĒĢśļŖö ĻĖ░ļ▓ĢņØä ņĀ£ ņŗ£ĒĢśņśĆļŗż(Chun et al., 2004). ņ×ÉļÅÖĒÖöĒä░ļ»ĖļäÉņŚÉ ņĀüņÜ® Ļ░ĆļŖźĒĢ£ ĒÜ© ņ£©ņĀüņØĖ Automated Transfer Crane(ATC) ņÜ┤ņśüļĪ£ņ¦üņØä Ļ░£ļ░£ĒĢś ĻĖ░ ņ£äĒĢ┤ņä£ ATC ņןļ╣ä ņÜ┤ņśüņĀäļץņØä ļČäņäØĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā ATCņØś ĒÜ©ņ£©ņĀüņØĖ ņÜ┤ņśüņŚÉ ņ׳ņ¢┤ņä£ Ļ░Ćņן ņżæņÜöĒĢ£ ļÅÖņĀü ņÜ┤ņśüļĪ£ņ¦üņØä Ļ░£ļ░£ĒĢś Ļ│Ā, ļŗ©ņł£ĒĢ£ ĒĢĀļŗ╣ĻĘ£ņ╣ÖņØä ņłśļ”ĮĒĢśņŚ¼ ņŗ£ļ«¼ļĀłņØ┤ņģś ņŗżĒŚśņ£╝ļĪ£ ļĪ£ņ¦üĻ▓Ć ņ”ØņØä ņĀ£ņŗ£ĒĢśņśĆļŗż. ņŗżĒŚśĻ▓░Ļ│╝ ATC ņāØņé░ņä▒ ņĀĆĒĢ┤ņÜöņØĖņØĖ Ļ░äņäŁņØä ņĄ£ņåīĒÖöĒĢśļŖö Ļ░äņäŁņĄ£ņåīĒÖöņĀäļץĻ│╝ ļŖźļÅÖņĀüņØĖ Ļ░äņäŁĒÜīĒö╝ņĀäļץņØ┤ ATC ņØś ļīĆĻĖ░ņŗ£Ļ░ä ļ░Å Ļ░äņäŁņŗ£Ļ░äņØä Ļ░Éņåīņŗ£ĒéżļŖö Ļ▓āņ£╝ļĪ£ ļéśĒāĆļé¼ļŗż(Kim and Nam, 2006).
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö ņĢ╝ļō£ ņןļ╣äņØś ņ×ÉļÅÖĒÖö ļ░Å ĒÖśņĀüĒÖöļ¼╝ņØś ņ”ØĻ░ĆļĪ£ ņØĖĒĢśņŚ¼ Ēä░ļ»ĖļäÉļé┤ņØś ņØ┤ņĀüņ×æņŚģņØ┤ ņ”ØĻ░ĆĒĢśĻ│Ā ņ׳ņ£╝ļ®░ ņØ┤ņŚÉ ļö░ļØ╝ Ēä░ļ»ĖļäÉ ņÜ┤ņśüņ×ÉļōżņØĆ ĒÜ©ņ£©ņĀüņØĖ ņØ┤ņĀüņ×æņŚģ Ļ│äĒÜŹņØä ņłśļ”ĮĒĢśĻ│Ā ņ׳ļŗż. ļĖöļĪØ ļé┤ņŚÉņä£ ļŗżņłśņØś ņ×ÉļÅÖĒÖö ņĢ╝ļō£ Ēü¼ļĀłņØĖņØ┤ ņÜ┤ņśüļÉśĻ│Ā ņ׳ ļŖö Ļ▓ĮņÜ░ņØś ņØ┤ņĀüņ×æņŚģ Ļ│äĒÜŹņØä ļŗżļŻ©Ļ│Ā ņ׳ņ£╝ļ®░ Ēś╝ĒĢ®ņĀĢņłśĻ│äĒÜŹļ▓ĢņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŻ╝ņ¢┤ņ¦ä ņŚ¼ņ£Ā ņŗ£Ļ░äņØä Ļ│ĀļĀżĒĢśņŚ¼ ņ×æņŚģĒÜ©ņ£©ņØä ņĄ£ļīĆĒÖöĒĢś ļŖö Ļ░ü Ēü¼ļĀłņØĖ ļ│ä ņĄ£ņĀü ņØ┤ņĀüņ×æņŚģ Ļ│äĒÜŹņØä ņłśļ”ĮĒĢśļŖö ņłśļ”¼ļ¬©ĒśĢņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Park, 2017). ņłśņ¦üļĖöļĪØļ░░ņ╣śĒśĢĒā£ļź╝ Ļ░Ćņ¦ĆļŖö ņ×ÉļÅÖĒÖö ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņØä ļīĆņāüņ£╝ļĪ£ ņĢłļ▓ĮĻ│╝ ņĢ╝ļō£ņØś ņŚ░Ļ│äņ×æņŚģņØä ņłśĒ¢ē ĒĢśļŖö ņØ┤ņåĪņןļ╣äņŚÉ ļīĆĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģś ļ¬©ļŹĖņØä ņłśļ”ĮĒĢśņśĆļŗż. ņØ┤ņåĪņן ļ╣äņØś ņ×æņŚģņāØņé░ņä▒ņØä ĒÅēĻ░ĆĒĢĀ ņłś ņ׳ļŖö ņŗ£ļ«¼ļĀłņØ┤ņģś ļ¬©ļŹĖņØä Ļ░£ļ░£ĒĢś ņśĆņ£╝ļ®░, ņłśļ”ĮļÉ£ ļ¬©ļŹĖņØä ĒåĄĒĢ┤ Ļ░ĆņāüņØś ĒÖśĻ▓ĮņŚÉņä£ ļŗżņ¢æĒĢ£ ņØ┤ņåĪņן ļ╣äņØś ņÜ┤ņśüņŚÉ ļö░ļźĖ ņĢłļ▓Įņןļ╣äņØś ņāØņé░ņä▒ņØä ļČäņäØ ņĀ£ņŗ£ĒĢśņśĆļŗż(Ha et al., 2004).
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņāØņé░ņä▒ Ē¢źņāüņØä ņ£äĒĢ£ ņ×ÉļÅÖĒÖöĻ░Ć ĻĄŁļé┤ņÖĖņŚÉ ņä£ ĒÖ£ļ░£Ē׳ ņØ┤ļŻ©ņ¢┤ņ¦ĆĻ│Ā ņ׳ļŗż. ņØ┤ņŚÉ ņ×ÉļÅÖĒÖö ņłśĒÅē ņןņ╣śņןņØä ļīĆņāü ņ£╝ļĪ£ ATC ņ×æņŚģĒĢĀļŗ╣ Ē£┤ļ”¼ņŖżĒŗ▒Ļ│╝ Yard Tractor(YT) ļ░░ņĀĢ Ē£┤ ļ”¼ņŖżĒŗ▒ņØä ņĪ░ĒĢ®ĒĢśņŚ¼ ņŗ£ļ«¼ļĀłņØ┤ņģśņ£╝ļĪ£ ĒÅēĻ░ĆĒĢśĻ│Ā ļŹöļČłņ¢┤ ĒÜ©ņ£©ņĀü ņØĖ ņןņ╣śņĀäļץĻ│╝ YT ĒÆĆļ¦ü ļ▓öņ£äļź╝ ņĢīņĢäļ│┤Ļ│Āņ×É ĒĢśņśĆļŗż. ņŗżĒŚś Ļ▓░ Ļ│╝ļź╝ ĒåĄĒĢ┤ ņŚ░ņåŹļÉśļŖö ļ│ĖņäĀ ņ×æņŚģļōżņØä ļæÉ ĻĖ░ņØś ATCĻ░Ć ĒĢśļéśņö® ļ▓łĻ░łņĢä Ļ░Ćļ®░ ņłśĒ¢ēĒĢśļÅäļĪØ ņ╗©ĒģīņØ┤ļäłļź╝ ļČäņé░ ņןņ╣śĒĢśĻ│Ā, ATCņØś ņ×æņŚģ ņśłņāü ņÖäļŻī ņŗ£Ļ░üņØä Ļ│ĀļĀżĒĢśņŚ¼ ļ¦łĻ░É ņŗ£Ļ░üņØ┤ Ļ░Ćņן ļ╣ĀļźĖ ņ×æņŚģ ņØä ņÜ░ņäĀ ņ▓śļ”¼ĒĢśļŖö ņ×æņŚģĒĢĀļŗ╣ Ē£┤ļ”¼ņŖżĒŗ▒Ļ│╝ Ēä░ļ»ĖļäÉ ņĀäņ▓┤ņŚÉņä£ Ļ░Ćņן ļ©╝ņĀĆ ņś¼ ņłś ņ׳ļŖö YTņŚÉ ņ×æņŚģņØä ļ░░ņĀĢĒĢśļŖö Ē£┤ļ”¼ņŖżĒŗ▒ ņĪ░ĒĢ®ņØ┤ Ļ░Ć ņן ĒÜ©ņ£©ņĀüņØ┤ņŚłļŗżĻ│Ā ņĀ£ņŗ£ĒĢśņśĆļŗż(Ahn et al., 2006). ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉņØś ņāØņé░ņä▒ Ē¢źņāüņŚÉ ņśüĒ¢źņØä ņżä ņłś ņ׳ļŖö ņÜöņØĖņØĆ ļŗżņ¢æĒĢśĻ▓ī ņĪ┤ ņ×¼ ĒĢ£ļŗż. ĻĘĖņżæ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äņØś Ļ▓ĮņÜ░, ĒŖ╣ņĀĢ ņäĀņäØĒü¼ļĀłņØĖņŚÉ ņĢ╝ļō£ ĒŖĖļ×ÖĒä░Ļ░Ć Ļ│ĀņĀĢ ĒĢĀļŗ╣ļÉśļŖö ļ░®ņŗØņŚÉņä£ ļŗżņłś ņäĀņäØĒü¼ļĀłņØĖņŚÉ ņĢ╝ļō£ ĒŖĖ ļ×ÖĒä░Ļ░Ć ņĀüņĀłĒĢśĻ▓ī ļČäņé░ ĒĢĀļŗ╣ ļ░®ņŗØņ£╝ļĪ£ ņ▓śļ”¼ĒĢśļŖö Pooling Systemņ£╝ļĪ£ ņĀäĒÖśĒĢśĻ▓ī ļÉśļ®┤ Ēä░ļ»ĖļäÉ ņāØņé░ņä▒Ļ│╝ YTņØś Ļ░ĆņÜ®ņä▒ņØä ļåÆņØ╝ ņłś ņ׳ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņāØņé░ņä▒ Ē¢źņāüņØä ņ£äĒĢ┤ ņØ┤ņåĪ ņןļ╣ä ņÜ┤ņśüņØä ļŹö ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ĒĢĀ ņłś ņ׳ļÅäļĪØ Pooling System ņĢī Ļ│Āļ”¼ņ”śņØä ņĀ£ņŗ£ĒĢśĻ│Ā ņŗżņĀ£ļĪ£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ņĀüņÜ®ĒĢśņŚ¼ Non Pooling SystemĻ│╝ Pooling System ņāØņé░ņä▒ņØä ļ╣äĻĄÉ ņĀ£ņŗ£ĒĢśņśĆ ļŗż(Cha and Noh, 2014).
2.3 ļ│ĖņäĀ ņ×ÉļÅÖĒÖö
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ĒĢśņŚŁņāØņé░ņä▒ņØĆ ņäĀņé¼ņÖĆņØś Ļ│äņĢĮņŚÉ ņ׳ņ¢┤ ņżæ ņÜöĒĢ£ ļČĆļČäņ£╝ļĪ£ ņĀüņÜ®ļÉśĻ│Ā ņ׳ņ¢┤ ņ¦ĆņåŹņĀüņ£╝ļĪ£ ņāØņé░ņä▒ Ē¢źņāüņØä ņ£äĒĢ£ ļ░®ņĢłņŚÉ ļīĆĒĢśņŚ¼ Ļ░ĢĻĄ¼ļÉśĻ│Ā ņ׳ļŖö ļ│ĖņäĀ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņé┤ĒÄ┤ļ│┤Ļ│Āņ×É ĒĢ£ļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĀüņĀĢ ņĢłļ▓ĮļŖźļĀźņØä ļČäņäØĒĢśĻĖ░ ņ£äĒĢ£ ņŗ£ļ«¼ļĀł ņØ┤ņģś ļ¬©ļŹĖņØä ĻĄ¼ņČĢĒĢśņśĆļŗż. ņäĀļ░ĢņØś Ēä░ļ»ĖļäÉ ļÅäņ░® ĒŖ╣ņä▒, ņäĀļ░Ģļ│ä ņ¢æ ĒĢśļ¤ē ļ░Å ņĀüĒĢśļ¤ē, ņ╗©ĒģīņØ┤ļäł Ēü¼ļĀłņØĖ ņāØņé░ņä▒ ļ░Å Ēł¼ņ×ģļīĆņłś ļō▒ņØä ņ×ģ ļĀźļ│ĆņłśļĪ£ ņ×ģļĀźĒĢśņŚ¼ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļŖö ņĢłļ▓ĮņĀÉņ£Āņ£©, ņäĀņäØ ņĀÉņ£Ā ņ£©, ļīĆĻĖ░ņŗ£Ļ░ä ļ╣äņ£©, ļīĆĻĖ░ļ╣äņ£©, Norm time ņ┤łĻ│╝ļ╣äņ£© ļō▒ņØä ņČ£ļĀź ĒĢśņśĆļŗż. ņØ┤ņżæ ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņØś ĒÅēĻ░Ćņ¦ĆĒæ£ļĪ£ļŖö Norm time ņ┤ł Ļ│╝ļ╣äņ£©, ļīĆĻĖ░ļ╣äņ£© ļ░Å ņĢłļ▓ĮņĀÉņ£Āņ£©ņØä ņĀüņÜ®ĒĢśņśĆļŗż. ņ╗©ĒģīņØ┤ļäł Ēä░ļ»Ė ļäÉņØä ņÜ┤ņśü ņżæņØĖ Ēä░ļ»ĖļäÉņØś Ēä░ļ»ĖļäÉ ņÜ┤ņśüņŗżņĀü ņ×ÉļŻīļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ļ¬©ļŹĖņØś ĒÖĢņØĖ ļ░Å Ļ▓Ćņ”ØņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Kim et al., 2001). ņłśņ¦üļ░░ ņ╣śĒśĢ ņןņ╣śņן ļĖöļĪØĒśĢĒā£ņØś ņ×ÉļÅÖĒÖö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØä ļīĆņāüņ£╝ļĪ£ ņĢłļ▓ĮņŚÉņä£ ņ╗©ĒģīņØ┤ļäłņØś ņ¢æ┬ĘņĀüĒĢś ņ×æņŚģņØä ņłśĒ¢ēĒĢśļŖö ņĢłļ▓ĮĒü¼ļĀłņØĖņŚÉ ļīĆĒĢ£ ĒĢśņŚŁņāØņé░ņä▒ņØä ĒÅēĻ░ĆĒĢśņśĆļŗż. ņĢłļ▓ĮĒü¼ļĀłņØĖņØś ņł£ņ×æņŚģ ņāØņé░ņä▒ ņØä ņé░ņČ£ĒĢśĻĖ░ ņ£äĒĢ┤ Ļ░ü ņןļ╣äņŚÉ ļīĆĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģś ļ¬©ļŹĖņØä ņłśļ”ĮĒĢś Ļ│Ā ņØ┤ļź╝ ņĀüņÜ®ĒĢ£ ņŗ£ļ«¼ļĀłņØ┤ņģś ņŗ£ņŖżĒģ£ņØä Ļ░£ļ░£ ņĀ£ņŗ£ĒĢśņśĆļŗż(Ha and Choi, 2005).
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņןņ╣śņןņØś ņ×æņŚģļČĆĒĢśĻ░Ć Ļ│Āļź┤Ļ▓ī ļČäņé░ļÉśļÅä ļĪØ ņĢłļ▓ĮĒü¼ļĀłņØĖņØś ņ×æņŚģņØä Ļ│äĒÜŹĒĢ©ņ£╝ļĪ£ņŹ© ņןņ╣śņןņØś ņ╗©ĒģīņØ┤ļäł ņ▓ś ļ”¼ļŖźļĀźņØä ņĄ£ļīĆļĪ£ ĒÖ£ņÜ®ĒĢĀ ņłś ņ׳ļŖö ļæÉ Ļ░Ćņ¦Ć ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢś ņśĆļŗż. ņ▓½ ļ▓łņ¦Ė ņĀ£ņĢł ļ░®ņĢłņØĆ ņןņ╣śņן ļĖöļĪØņØś ņ×æņŚģļČĆĒĢśņØś ņŚöĒŖĖļĪ£ Ēö╝(Entropy)ļź╝ Ļ│äņé░ĒĢśņŚ¼ ņØ┤ļź╝ ņĄ£ļīĆĒÖöĒĢśļÅäļĪØ ļŗżņØīņŚÉ ņ×æņŚģĒĢĀ ļ▓Ā ņØ┤ļź╝ Ļ▓░ņĀĢĒĢśļŖö Ē£┤ļ”¼Ļ│╝Ēŗ▒ ņĢīĻ│Āļ”¼ņ”śņØ┤ļŗż. ļæÉ ļ▓łņ¦Ė ļ░®ņĢłņØĆ ņ£ĀņĀä ņĢīĻ│Āļ”¼ņ”śņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņĄ£ņĀüņØś ņäĀļ░Ģ ļ▓ĀņØ┤ ņ×æņŚģņł£ņä£ļź╝ ĒāÉņāēĒĢ£ļŗż. ņ£ĀņĀä ņĢīĻ│Āļ”¼ņ”śņØś Ļ░ü ņŚ╝ņāēņ▓┤ņØś ņĀüĒĢ®ļÅäļź╝ Ļ│äņé░ĒĢśĻĖ░ ņ£äĒĢ┤ ņןņ╣śņן ņØś ņ×æņŚģļČĆĒĢś ļČäĒżļź╝ Ļ│ĀļĀżĒĢśņŚ¼ ņĢłļ▓ĮĒü¼ļĀłņØĖņØś ņ×æņŚģņŗ£Ļ░äņØä Ļ│äņé░ ĒĢśļŖö ņĢīĻ│Āļ”¼ņ”śņØä Ļ│ĀņĢł ņĀ£ņŗ£ĒĢśņśĆļŗż(Lee et al., 2008). ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņØĆ Ļ▓īņØ┤ĒŖĖ ņŗ£ņŖżĒģ£, ņןņ╣śņŗ£ņŖżĒģ£, ņØ┤ņåĪņŗ£ņŖżĒģ£, ņĀüņ¢æĒĢśņŗ£ņŖż Ēģ£ ļō▒ņØś ĒĢśļČĆņŗ£ņŖżĒģ£ņ£╝ļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ņ¢┤ņä£ ņŗ£ņŖżĒģ£ņØś ņĄ£ņĀüĒÖöĻ░Ć ņÜöĻĄ¼ļÉśļ®░, ņÜ┤ņśüņŚÉ ņ׳ņ¢┤ņä£ļÅä ņןļ╣ä, ņØĖļĀź, ņןņ╣śņן ļō▒ ņĀ£ĒĢ£ļÉ£ ņ×É ņøÉņØä ĒÜ©ņ£©ņĀüņ£╝ļĪ£ ņé¼ņÜ®ĒĢśļŖö Ļ▓āņØ┤ Ēä░ļ»ĖļäÉ Ļ▓Įņ¤üļĀź Ļ░ĢĒÖö ņĖĪļ®┤ņŚÉņä£ ņżæņÜöĒĢśļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņäżĻ│äņŚÉ ņé¼ņÜ®ļÉĀ ņłś ņ׳ļŖö ņŗ£ļ«¼ļĀłņØ┤ņģś ļ¬©ĒśĢņØä ņĀ£ņŗ£ĒĢśņśĆļŗż(Nam et al., 1999)
ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉņØĆ ļīĆĒśĢĒÖöļÉ£ ņäĀļ░ĢņØś ļ¦ÄņØĆ ļ¼╝ļ¤ēņŚÉ ļīĆĒĢ┤ņä£ ņ¢æņĀüĒĢś ņ×æņŚģņØä ļ╣ĀļźĖ ņŗ£Ļ░ä ļé┤ņŚÉ ņ▓śļ”¼ĒĢ©ņ£╝ļĪ£ņŹ© ņäĀļ░ĢņØś ņĀĢļ░Ģņŗ£Ļ░ä ņØä ņĄ£ņåīĒÖöĒĢśĻ│Āņ×É ĒĢ£ļŗż. ņĢ╝ļō£ Ēü¼ļĀłņØĖĻ│╝ ņĢ╝ļō£ ĒŖĖļ¤ŁņØä ĒĢ©Ļ╗ś Ļ│ĀļĀż ĒĢśņŚ¼ ņןļ╣äņŚÉ ņ×æņŚģņØä ĒĢĀļŗ╣ĒĢśļ®░, ĒĢĀļŗ╣ļÉ£ ņ×æņŚģļōżņØä ņןļ╣äļōż Ļ░äņØś ĻĄÉņ░®ņāüĒā£Ļ░Ć ļÉśņ¦Ć ņĢŖļÅäļĪØ ņ×æņŚģĻ│äĒÜŹņØä ņłśļ”ĮĒĢ©ņ£╝ļĪ£ņŹ© ņäĀļ░ĢņØś ņ¢æ ņĀüĒĢś ņ×æņŚģņØä ļ╣ĀļźĖ ņŗ£Ļ░ä ļé┤ņŚÉ ņÖäļŻīĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢ£ļŗż. ļ¬©ļōĀ ĒĢĀ ļŗ╣Ļ│╝ ņ×æņŚģ Ļ│äĒÜŹņØä Ļ│ĀļĀżĒĢśļŖö ņĄ£ņĀüĒÖö ļ░®ļ▓ĢļĪĀĻ│╝ ņØ┤ļź╝ ļ│┤ņÖäĒĢśĻĖ░ ņ£äĒĢ┤ Ē£┤ļ”¼ņŖżĒŗ▒ ņĢīĻ│Āļ”¼ņ”śņØä ņĀ£ņĢłĒĢśĻ│Ā, ņĄ£ņĀüĒÖö ļ░®ļ▓ĢļĪĀĻ│╝ ņĀ£ņĢłļÉ£ Ē£┤ļ”¼ņŖżĒŗ▒ ņĢīĻ│Āļ”¼ņ”śņØś ņä▒ļŖźņØä ļ╣äĻĄÉĒĢśĻ│Āņ×É ĒĢśņśĆļŗż(Lee and Ha, 2008). ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņŻ╝ņÜö ņāØņé░ņä▒ ņ¦ĆĒæ£ ņżæņŚÉ ĒĢśļéśļŖö ņĢłļ▓Į ņŚÉņä£ņØś ņ×æņŚģ ņāØņé░ņä▒ņØ┤ļŗż. ņĢłļ▓Į Ēü¼ļĀłņØĖņØś ņ×æņŚģ ņØ╝ņĀĢņØĆ ņĢłļ▓Į ņ×æ ņŚģ ņāØņé░ņä▒ņŚÉ ļ¦ÄņØĆ ņśüĒ¢źņØä ņżĆļŗż. ņĢłļ▓Į ņ×æņŚģ ņāØņé░ņä▒ņØä ļåÆņØ┤ĻĖ░ ļŹö ļĖö ņé¼ņØ┤Ēü┤ņØ┤ļéś ļōĆņ¢╝ ņé¼ņØ┤Ēü┤ņØĆ ņāłļĪ£ņÜ┤ ņןļ╣äļź╝ ļÅäņ×ģĒĢśņ¦Ć ņĢŖĻ│Ā ņÜ┤ņśüņāüņØś ļ│ĆĒÖöļ¦īņ£╝ļĪ£ ņĢłļ▓Į ņāØņé░ņä▒ņØä ļåÆņØ╝ ņłś ņ׳ļŖö ļ░®ļ▓Ģņ£╝ļĪ£ņä£ ļ¦ÄņØĆ ņŚ░ĻĄ¼Ļ░Ć ņØ┤ļŻ©ņ¢┤ņ¦ĆĻ│Ā ņ׳ļŗż. ņĢ╝ļō£ ĒŖĖļ×ÖĒä░ļź╝ Ļ│ĀļĀżĒĢĀ ļōĆņ¢╝ ņé¼ ņØ┤Ēü┤ ņÜ┤ņśüņØä ņ£äĒĢ£ Ēü¼ļĀłņØĖ ņØ╝ņĀĢĻ│äĒÜŹņŚÉ ļīĆĒĢ┤ ĒĢ┤ļ▓ĢņØä ņĀ£ņŗ£ĒĢśņśĆļŗż (Jung and Shin, 2009).
ņäĀĒ¢ēņŚ░ĻĄ¼ņØś ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ņĀüĒĢ®ĒĢ£ Ļ▓īņØ┤ĒŖĖ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼, ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼, ļ│ĖņäĀ ņ×ÉļÅÖĒÖö ļÅäņ×ģ ļ░®ņĢłņŚÉ ļīĆĒĢśņŚ¼ ņĀ£ņŗ£ĒĢśĻ│Ā ĒĢ£Ļ│äņĀÉņØä Ļ░üĻ░ü ņĀ£ņŗ£ĒĢśņśĆļŗż.
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ņŗżņĀ£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ĒĢ┤ļŗ╣ ņŚ░ĻĄ¼ņŚÉ ļīĆĒĢ£ DGPSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņ×ÉļÅÖĒÖö ņĢ╝ļō£ņןļ╣ä ņŗ£ņŖżĒģ£ņØś ĻĄ¼ņä▒ņÜöņåīņÖĆ ĻĖ░ļŖźņØä ņé┤ĒÄ┤ļ│Ė Ēøä ņŗżņĀ£ļĪ£ ņĀüņÜ®ĒĢśņŚ¼ ĻĖ░ņĪ┤ ņĢ╝ļō£ ņŗ£ ņŖżĒģ£Ļ│╝ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņ×ÉļÅÖĒÖö ņĢ╝ļō£ņןļ╣ä ņŗ£ņŖżĒģ£ņØś ļ╣äĻĄÉ ļČäņäØ ļ░Å ņĀüņÜ®ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśĻ│Āņ×É ĒĢ£ļŗż.
ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ ņĀüņÜ®ļ░®ņĢł
3.1 ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£
ņŗżņĀ£ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņןļ╣äĻ░Ć ļ»Ėņäżņ╣śļÉśņ¢┤ ņ׳ļŖö Ļ┤æņ¢æ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņŚģļ¼┤ ĒöäļĪ£ņäĖņŖż, ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ĒĢśļō£ņø©ņ¢┤ ļ░Å ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņÜ┤ņśü ņŗ£ņŖżĒģ£ņØä ņé┤ĒÄ┤ļ│┤Ļ│Āņ×É ĒĢ£ļŗż.
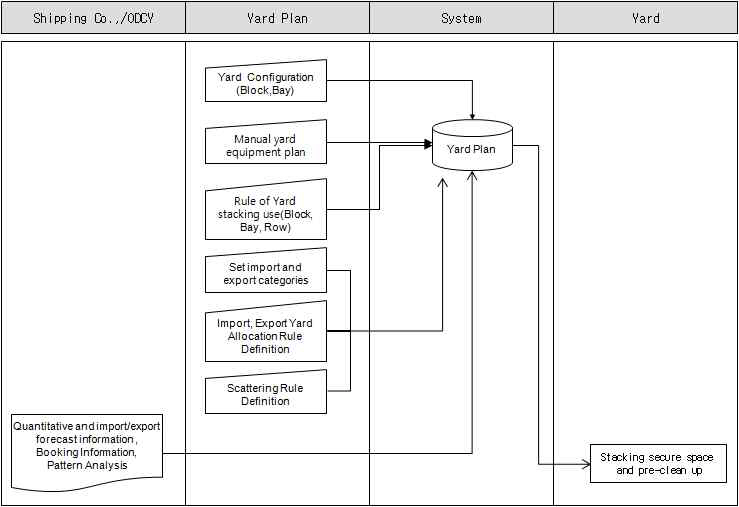
ņĢ╝ļō£ ĒÖśĻ▓Į, ņĢ╝ļō£ ņןļ╣ä ļŗ┤ļŗ╣ņ×ÉņÖĆ ņŚģļ¼┤ĒśæņØś Ēøä ņłśļÅÖņ£╝ļĪ£ ņĢ╝ļō£ ņÜ┤ņśü Ļ░ĆņÜ® ņןļ╣ä ĒÖĢņØĖ ļ░Å ņĢ╝ļō£ ņןņ╣śņן ņÜ┤ņśü ĻĘ£ņ╣Ö ļō▒ņØä ĒÖĢņØĖĒĢś Ļ│Ā ņĢ╝ļō£Ļ│äĒÜŹņØä ņäĖņÜ┤ļŗż. ĻĘĖļ”¼Ļ│Ā ņ¢æņĀüĒĢś ļ░Å ļ░śņČ£ņ×ģ ņśłņĖĪ ņĀĢļ│┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĢ╝ļō£Ļ│äĒÜŹ ņłśļ”Į Ēøä ņĢ╝ļō£ ņןņ╣śņן Ļ│ĄĻ░ä ĒÖĢļ│┤ ļ░Å ņé¼ņĀä ņĀĢļ”¼ ņ×æņŚģņØä Ļ│äĒÜŹĒĢ£ļŗż. ņ×ÉņäĖĒĢ£ ņĢ╝ļō£ ņÜ┤ņśü Ļ│äĒÜŹ ĒöäļĪ£ņäĖņŖżļŖö Fig. 1Ļ│╝ Ļ░Öļŗż.
3.1.2 ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ĒĢśļō£ņø©ņ¢┤ ĻĄ¼ņä▒
ĻĖ░ņĪ┤ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŖö ņØ┤ņåĪņןļ╣ä(TC, RS)ņØś ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ĻĄ¼ņä▒ņØĆ Fig. 2ņÖĆ Ļ░Öļŗż.

Fig. 2ļŖö ņĢ╝ļō£ņŚÉņä£ ņØ┤ļÅÖĒĢśļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äņØś ņøĆņ¦üņ×äņØä Ēīī ņĢģĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äņŚÉ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö ĒĢśļō£ņø©ņ¢┤ ĻĄ¼ ņä▒ņ£╝ļĪ£ ņĢ╝ļō£ ļŗ©ļ¦ÉĻĖ░ņŚÉņä£ ņ╗©ĒģīņØ┤ļäł ņ×æņŚģ ņ▓śļ”¼ ņÖäļŻīĻ░Ć ļÉśļŖö ņŗ£ ņĀÉņŚÉ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņ£äņ╣śļź╝ ĒīīņĢģ ĒĢĀ ņłś ņ׳ļŗż.
3.1.3 ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņÜ┤ņśü ņŗ£ņŖżĒģ£
ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņÜ┤ņśü ņŗ£ņŖżĒģ£ņŚÉņä£ ņ╗©ĒģīņØ┤ļäł ņØ┤ņåĪņןļ╣ä (TC, RS)ņØś ņāüĒā£ ņĀĢļ│┤ļź╝ ņé¼ņÜ®ņ×ÉĻ░Ć ņĢ╝ļō£ ļŗ©ļ¦ÉĻĖ░ņŚÉņä£ ņ╗©ĒģīņØ┤ļäł ņ×æņŚģ ņ▓śļ”¼ ņÖäļŻīĻ░Ć ļÉśļŖö ņŗ£ņĀÉņŚÉ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ£äņ╣ś ĒīīņĢģņØ┤ Ļ░Ć ļŖźĒĢśĻ│Ā YT ņ£äņ╣śļŖö ĒīīņĢģņØ┤ ļČłĻ░ĆļŖźĒĢśļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĢ╝ ļō£ ņØ┤ļÅÖņןļ╣ä ņÜ┤ņśü ĒśäĒÖ®ņØä Monitoring ĒĢĀ ņłś ņ׳ļŖö ņŗ£ņŖżĒģ£ņØĆ Fig. 3Ļ│╝ Ļ░Öļŗż.
3.2 ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£
ņŗżņĀ£ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØ┤ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö ĻĄŁņÖĖ ņżæļÅÖ(A) ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņŚģļ¼┤ ĒöäļĪ£ņäĖņŖż, ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×É ļÅÖĒÖö ĒĢśļō£ņø©ņ¢┤ ļ░Å ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņÜ┤ņśü ņŗ£ņŖżĒģ£ņØä ņé┤ĒÄ┤ ļ│┤Ļ│Āņ×É ĒĢ£ļŗż.
3.2.1 ņŚģļ¼┤ ĒöäļĪ£ņäĖņŖż
ņĢ╝ļō£ ĒÖśĻ▓Į, ņ╗©ĒģīņØ┤ļäł ņØ┤ņåĪņןļ╣ä ņÜ┤ņśü ņāüĒā£ļź╝ ņŗ£ņŖżĒģ£ņ£╝ļĪ£ ĒÖĢ ņØĖ Ēøä ņØ┤ņåĪņןļ╣ä ĒÖśĻ▓Į ņäżņĀĢ ļ░Å ņĢ╝ļō£ ņןņ╣śņן ņé¼ņÜ® ĻĘ£ņ╣Ö ļō▒ņØä ņØ┤ ņÜ®ĒĢśņŚ¼ ņĢ╝ļō£Ļ│äĒÜŹņØä ņäĖņÜ┤ļŗż, ĻĘĖļ”¼Ļ│Ā ņ¢æņĀüĒĢś ļ░Å ļ░śņČ£ņ×ģ ņśłņĖĪ ņĀĢ ļ│┤, ļ░śņČ£ņ×ģ Ēī©Ēä┤ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņĢ╝ļō£Ļ│äĒÜŹ Ēøä ņĢ╝ļō£ ņןņ╣śņן Ļ│ĄĻ░ä ĒÖĢ ļ│┤ ļ░Å ņé¼ņĀä ņĀĢļ”¼ ņ×æņŚģņØä Ļ│äĒÜŹĒĢ£ļŗż. ņ×ÉņäĖĒĢ£ ņĢ╝ļō£ ņÜ┤ņśü Ļ│äĒÜŹ Ēöä ļĪ£ņäĖņŖżļŖö Fig. 4ņÖĆ Ļ░Öļŗż.

3.2.2 ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ĒĢśļō£ņø©ņ¢┤ ĻĄ¼ņä▒
ņŗżņĀ£ ņżæļÅÖ(A) ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ DGPSļź╝ ņĀüņÜ®ĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäł Ēä░ļ»ĖļäÉ ņ×ÉļÅÖĒÖö ņןļ╣äļź╝ ņŗżņŗ£Ļ░ä ņ£äņ╣śņÖĆ ņāüĒā£ņŚÉ ļīĆĒĢ┤ ĒīīņĢģ ĒĢĀ ņłś ņ׳ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ĒĢśļō£ņø©ņ¢┤ ĻĄ¼ņä▒ņØĆ Fig. 5ņÖĆ Ļ░Öļŗż.
3.2.3 ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņÜ┤ņśü ņŗ£ņŖżĒģ£
ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņÜ┤ņśü ņŗ£ņŖżĒģ£ņŚÉņä£ DGPSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ╗© ĒģīņØ┤ļäł ņØ┤ņåĪņןļ╣ä(TC, RS, YT)ņØś ņāüĒā£ ņĀĢļ│┤ļź╝ ņé¼ņÜ®ņ×ÉĻ░Ć ņŗżņŗ£Ļ░äņ£╝ ļĪ£ ĒīīņĢģ ĒĢĀ ņłś ņ׳ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņÜ┤ņśü ņŗ£ņŖżĒģ£ ĒśäĒÖ®ņØä 3D/2DļĪ£ Monitoring ĒĢĀ ņłś ņ׳ļŖö ņŗ£ņŖżĒģ£ņØĆ Fig. 6Ļ│╝ Ļ░Öļŗż.

3.3 ņĀüņÜ®ļ░®ņĢł
3.3.1 DGPS Ļ░£ļģÉ
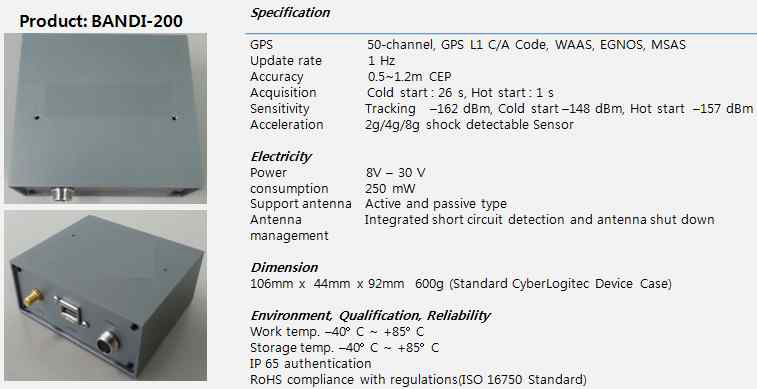
DGPSņØĆ ĻĖ░ņżĆĻĄŁņ£╝ļĪ£ ļČĆĒä░ ļ│┤ņĀĢļŹ░ņØ┤Ēä░ļź╝ ļ░øņĢä ņ£äņ╣śņĀĢļ│┤ ļ│┤ ņĀĢņØ┤ Ļ░ĆļŖźĒĢśļ®░ ĻĘ╝Ļ▒░ļ”¼(ņĢĮ 10Km)ņØś ĒŚłņÜ® ļ▓öņ£ä ņĢłņŚÉņä£ ņä£ļ╣äņŖż ļź╝ ņĀ£Ļ│ĄĒĢśĻ│Ā ļ│┤ņĀĢņØä ņ£äĒĢ£ ĻĖ░ņżĆĻĄŁņØä ņäĖņøīņĢ╝ ĒĢśļŖö ņĀ£ĒĢ£ņØä Ļ░Ćņ¦Ć Ļ│Ā ņ׳ļŗż. ņĀĢļ░ĆļÅäļŖö 70Cm ļé┤ņÖĖņØ┤ļ®░, ĒŖ╣ņä▒ņØĆ ĻĄ¼ņČĢļ╣äņÜ®ņØ┤ ņĀĆļĀ┤ĒĢś Ļ│Ā ņŗ£ņŖżĒģ£ ĒÖĢņןņä▒ ļ░Å Ē¢źņāüļÉ£ ņĀĢĒÖĢņä▒Ļ│╝ ļŗżņ¢æĒĢ£ ĒśĢĒā£ņØś ņĀ£ĒÆłĻĄ░ ņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŗż. ņŻ╝ņÜö ĒÖ£ņÜ®ņ¦ĆļŖö ĒĢ┤ņÜ┤(ĒĢŁļ¦ī, ņäĀļ░ĢĒĢŁĒĢ┤), ņŖżĒżņĖĀ (Ļ│©Ēöäņן, ņŚ¼Ē¢ēņ×É ņĀĢļ│┤ ņŗ£ņŖżĒģ£)ļō▒ņŚÉņä£ ĒÖ£ņÜ®ņØ┤ Ļ░ĆļŖźĒĢśļŗż.
3.3.2 DGPS ņĀ£ĒÆł ņŖżĒÄÖ
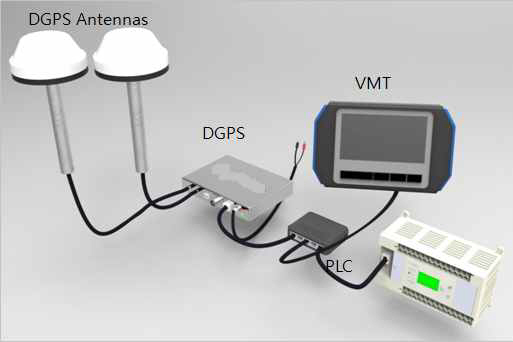
ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņ£äņ╣ś ņĀĢļ│┤ļź╝ ņé░ņČ£ĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņé¼ņÜ® ļÉśļŖö DGPS ņןļ╣äļĪ£ņŹ© Ēä░ļ»ĖļäÉļé┤ņØś ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņןļ╣ä ņ£äņ╣ś ņĀĢļ│┤ļź╝ ņĀäļŗ¼ĒĢśļŖö ĻĖ░ļŖźņØä Ļ░Ćņ¦ä ņןļ╣äļĪ£ ņŗżņĀ£ ņżæļÅÖ(A) ņ╗©Ēģī ņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ņĀüņÜ®ĒĢśņŚ¼ ņé¼ņÜ®ĒĢśĻ│Ā ņ׳ļŖö DGPS ņĀ£ĒÆł ņŖżĒÄÖņØĆ Fig. 7Ļ│╝ Ļ░Öļŗż.
3.3.3 ņĢ╝ļō£ ņןļ╣äļ│ä ĻĄ¼ņä▒
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØś DGPS ĻĄ¼ņä▒ ļ░®ļ▓ĢņØĆ Fig. 8Ļ│╝ Ļ░Öļŗż.
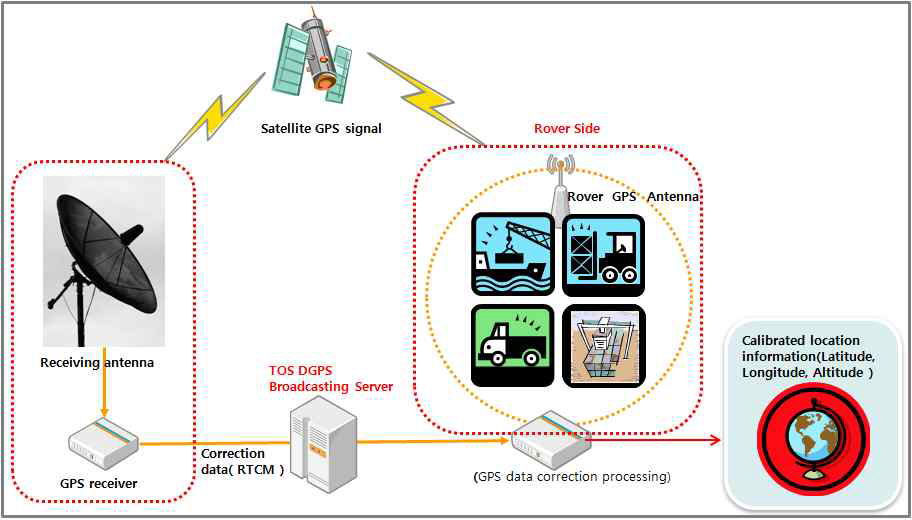
ĻĖ░ņżĆĻĄŁņŚÉņä£ ņĀĢļ░Ć ņĖĪņĀĢņØä ĒåĄĒĢ£ ņĀĢĒÖĢĒĢ£ ņ£äņ╣śļź╝ ĻĖ░ņżĆņ£╝ļĪ£ DGPS ļīĆĻĖ░ ņśżņ░©ļź╝ Ļ│äņé░ĒĢśņŚ¼ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņןļ╣äņŚÉĻ▓ī ļ®öņŗ£ņ¦ĆļĪ£ ļ│ĆĒÖśĒĢśņŚ¼ ļ│┤ļé┤ļ®┤, ļ¼┤ņäĀļ×£ ļäżĒŖĖņøīĒü¼ļź╝ ĒåĄĒĢśņŚ¼ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņן ļ╣äņŚÉ ņäżņ╣śļÉ£ DGPS ņןļ╣äļĪ£ ņĀäļŗ¼ĒĢśĻ│Ā, ņĀäļŗ¼ļ░øņØĆ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņןļ╣äņØś ļŹ░ņØ┤Ēä░ņÖĆ ņ×ÉņŗĀņØś ņ£äņ╣śļź╝ ņŚ░ņé░ĒĢśņŚ¼ ņśżņ░© ļ│┤ņĀĢĒĢśņŚ¼ ņ£äņ╣ś ņØä ņĀ£Ļ│ĄĒĢśļŖö ļ░®ļ▓ĢņØ┤ļŗż.
ņŗżņĀ£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ ņĀüņÜ®ĒĢśņŚ¼ ņé¼ņÜ®ļÉśĻ│Ā ņ׳ļŖö ņØ┤ņåĪņן ļ╣äņØś ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņןļ╣ä ĻĄ¼ņä▒ņØĆ Fig. 9ņÖĆ Ļ░Öļŗż.

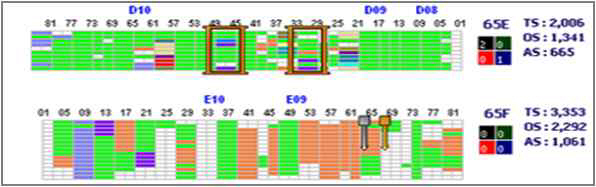
Fig. 9ļŖö ņĢ╝ļō£ņŚÉņä£ ņØ┤ļÅÖĒĢśļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņןļ╣äņØś ņøĆ ņ¦üņ×äņØä ĒīīņĢģĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äņŚÉ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö ĒĢśļō£ ņø©ņ¢┤ ĻĄ¼ņä▒ņ£╝ļĪ£ ņĢ╝ļō£ ļŗ©ļ¦ÉĻĖ░ņŚÉ ņäżņ╣śļÉśņ¢┤ ņ׳ļŖö DGPSļź╝ ĒåĄĒĢ┤ņä£ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņ£äņ╣śļź╝ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ĒīīņĢģ ĒĢĀ ņłś ņ׳ļŗż.
ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØś DGPS ņŗ£ņŖżĒģ£ ĻĄ¼ņä▒ļÅäļŖö Fig. 10ņÖĆ Ļ░Öļŗż. ņØ┤ņåĪņןļ╣äņŚÉņä£ ņĀ£Ļ│ĄļÉśļŖö F/B signalņØä ņØ┤ņÜ®ĒĢ£ Ļ┤Ćņä▒ĒÖöļ▓Ģ ĻĖ░ ļŖźņØä ņé¼ņÜ®ĒĢśņŚ¼ DGPS ņĀĢĒÖĢĒĢ£ ņØ┤ņåĪņןļ╣ä ņ£äņ╣śļź╝ ņĢī ņłśĻ░Ć ņ׳ļŗż. DGPSņŚÉņä£ ņĀ£Ļ│ĄļÉśļŖö ņ£äņ╣śņĀĢļ│┤ņÖĆ ņØ┤ņåĪņןļ╣äņŚÉņä£ ņĀ£Ļ│ĄļÉśļŖö ņä╝ņä£ņĀĢ ļ│┤ņØä ĒåĄĒĢ┤ PDS ņןļ╣äļĪ£ ņłśņ¦æļÉśĻ│Ā ņØ┤Ēøä VMT ClientņŚÉ ņĀäņåĪļÉ£ļŗż. VMT ClientļŖö Ēä░ļ»ĖļäÉņØś ņĀĢļ│┤ņÖĆ ņØ┤ņåĪņןļ╣äņØś ņĀĢļ│┤ļź╝ ļ¼┤ņäĀ ļäżĒŖĖ ņøīĒü¼ļź╝ ĒåĄĒĢśņŚ¼ ServerļĪ£ ļ│┤ļéĖļŗż.

3.3.4 DGPS ĒģīņŖżĒŖĖ Ļ▓░Ļ│╝
ņŗżņĀ£ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ DGPS ĒģīņŖżĒŖĖ Ļ▓░Ļ│╝ļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ ņĖĪņĀĢ ļ░®ļ▓ĢņØĆ IEC 61108-1 Ēæ£ņżĆ ņĖĪņĀĢ ņĀłņ░©ļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż.
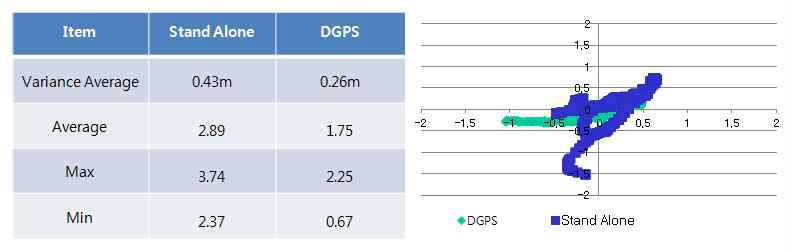
Ļ░£ĒÖ£ņ¦Ć ņĢ╝ļō£ ņ¦ĆņŚŁņŚÉņä£ Stand-alone ļ░Å ļ│┤ņĀĢ ļŹ░ņØ┤Ēä░ ņĖĪņĀĢ Ļ▓░Ļ│╝ ļČäņé░ ņśżņ░©ļŖö 0.3m ņØ┤ļé┤ņśĆļŗż. ņ×ÉņäĖĒĢ£ ņĀĢļ░ĆļÅä ļ░Å ņĀüĒĢ®ņä▒ ĒģīņŖżĒŖĖ Ļ▓░Ļ│╝ļŖö Fig. 11Ļ│╝ Ļ░Öļŗż.
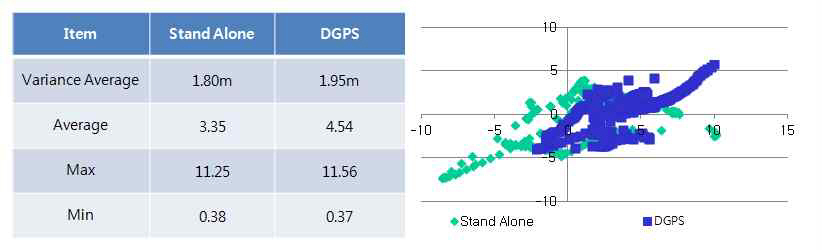
Container ļ░Ćņ¦æ ņ¦ĆņŚŁņØĖ Yard Block ņŚÉņä£ Stand alone ļ░Å ļ│┤ ņĀĢ ļŹ░ņØ┤Ēä░ ņĖĪņĀĢ Ļ▓░Ļ│╝ ļČäņé░ ņśżņ░©ļŖö 2m ņØ┤ļé┤ņśĆļŗż. ņ×ÉņäĖĒĢ£ ņĀĢļ░Ć ļÅä ļ░Å ņĀüĒĢ®ņä▒ ĒģīņŖżĒŖĖ Ļ▓░Ļ│╝ļŖö Fig. 12ņÖĆ Ļ░Öļŗż.
Ļ▓░ļĪĀ ļ░Å Ē¢źĒøäĻ│╝ņĀ£
ļ│Ė ņŚ░ĻĄ¼ļŖö ņŗżņĀ£ ĻĄŁļé┤ Ļ┤æņ¢æ(A)Ļ│╝ ĻĄŁņÖĖ ņżæļÅÖ(A) ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉņØä ņÜ┤ņśüĒĢśļ®┤ņä£ ņ¢╗ņØĆ Ļ▓░Ļ│╝ ļé┤ņÜ®ņØä ļ░öĒāĢņ£╝ļĪ£ ņ×ÉļŻīļź╝ ņé░ņČ£ĒĢś ņśĆļŗż. ĻĄŁņÖĖ ņżæļÅÖ(A) ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ DGPSļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņ╗© ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äļź╝ ņŗżņŗ£Ļ░ä ņ£äņ╣śņÖĆ ņāüĒā£ļź╝ ĒÖĢņØĖĒĢś ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ņŗżņĀ£ Ļ░£ļ░£, ņĀüņÜ®, ņÜ┤ņśüĒĢśļŖö Ļ││ņ£╝ļĪ£ ņäĀņĀĢĒĢśņśĆļŗż. ļśÉĒĢ£, ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØś ĻĄ¼ņä▒ņÜöņåīņÖĆ ĻĖ░ļŖźņØä ņé┤ĒÄ┤ļ│┤Ļ│Ā ņŗżņĀ£ļĪ£ ņÜ┤ņśüļÉśļŖö ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£Ļ│╝ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļ╣äĻĄÉ ļČäņäØĒĢśņśĆļŗż.
ņ£äņ╣ś ņČöņĀü ņŗ£ņŖżĒģ£ņØä ņé¼ņÜ®ĒĢśņ¦Ć ņĢŖĻ│Ā ĻĖ░ņĪ┤ Ēä░ļ»ĖļäÉ ņÜ┤ņśü ņ▓┤ņĀ£ ļź╝ ņé¼ņÜ®ĒĢśļŖö ļīĆļČĆļČäņØś ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉņä£ļŖö ņé¼ņÜ®ņ×ÉĻ░Ć ņĢ╝ļō£ Ēä░ņ╣ś ļŗ©ļ¦ÉĻĖ░ļĪ£ ņ╗©ĒģīņØ┤ļäł ņ×æņŚģ ņÖäļŻī ņŗ£ņĀÉņØä ĒåĄĒĢ┤ ņĀĢļ│┤Ļ░Ć ņłśļÅÖ ņ£╝ļĪ£ ņłśņ¦æļÉśļ»ĆļĪ£ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņ£äņ╣śĻ░Ć ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņĀĢ ļ│┤ņĀäļŗ¼ ļÉśņ¦Ć ņĢŖņĢäņä£ ņŗĀļó░ņä▒ņØ┤ ļ¢©ņ¢┤ ņ¦łņłś ņ׳ļŗż. ļśÉĒĢ£, ņĀĢļ│┤ņĀäļŗ¼ ņØ┤ ļŖ”ņ¢┤ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņÜ┤ņĀäņ×ÉĻ░Ć ņלļ¬╗ļÉ£ ņ×æņŚģņ£äņ╣śņŚÉņä£ ĻĖ░ļŗżļ”¼Ļ│Ā ņ׳Ļ▒░ļéś ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņÜ┤ņĀäņ×ÉĻ░Ć ņ╗©ĒģīņØ┤ļäł ņÖä ļŻīļź╝ ļ│┤Ļ│ĀĒĢśņ¦Ć ņĢŖĻ│Ā ļŗżļźĖ ņ×æņŚģņØä ņŗ£ņ×æĒĢśļŖö Ļ▓ĮņÜ░ņÖĆ ļ│┤Ļ│Ā ļÉ£ ņ╗© ĒģīņØ┤ļäłņØś ņ£äņ╣śĻ░Ć ņŗżņĀ£ ņ£äņ╣śņÖĆ ļŗżļźĖ Ļ▓ĮņÜ░ņŚÉ ļ░£ņāØ ĒĢĀ ņłś ņ׳ļŗż. ņØ┤ņÖĆ Ļ░ÖņØ┤ ņŻ╝ņÜö ļ¼ĖņĀ£ņØś ņøÉņØĖņ£╝ļĪ£ ņŗżņłśĻ░Ć ņēĮĻ▓ī Ļ░Éņ¦ĆļÉśņ¦Ć ņĢŖņĢä ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņÜ┤ņśü ĒÜ©ņ£©ņä▒ņØ┤ ļ¢©ņ¢┤ņ¦ł ņłś ņ׳ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉņŚÉņä£ ņĢłņĀäļÅäĻ░Ć Ļ░Ćņן ņżæņÜöĒĢ£ Ļ│ĀļĀż ņé¼ĒĢŁ ņżæ ĒĢśļéśņØ┤ļŗż. ņØ┤ņåĪ ņןļ╣ä Ļ░äņŚÉ ņČ®ļÅī ļ░Å YTĻ░Ć ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä(TC, RS) ļ░æņŚÉ ņ×æņŚģ ļīĆĻĖ░ ņżæ ņĀæņ┤ē ņé¼Ļ│ĀĻ░Ć ļ░£ņāØ ĒĢĀ ņłśĻ░Ć ņ׳ļŗż. ņØ┤ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä Ļ░Ć ņØ┤ļÅÖ ņżæņŚÉ ņé¼ņÜ®ņ×ÉĻ░Ć ņĢ╝ļō£ Ēä░ņ╣ś ļŗ©ļ¦ÉĻĖ░ļź╝ ņĪ░ņ×æĒĢśļŖö Ļ▓āņØ┤ ņĢł ņĀäņŚÉ ļ¼ĖņĀ£Ļ░Ć ļÉśņ¢┤ ļ░£ņāØ ĒĢĀ ņłś ņ׳ļŗż.
ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ņĀüņÜ®ĒĢś Ļ▓ī ļÉśļ®┤ ņ£äņØś ļ¼ĖņĀ£ļŖö ņēĮĻ▓ī ĒĢ┤Ļ▓░ ļÉĀ ņłśĻ░Ć ņ׳ļŗż. ĻĖ░ņĪ┤ ņĢ╝ļō£ ņØ┤ņåĪ ņןļ╣ä ņŗ£ņŖżĒģ£Ļ│╝ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļ╣äĻĄÉĒĢśļŖö ĒÖöļ®┤ ņ£╝ļĪ£ Fig. 13Ļ│╝ Ļ░Öļŗż. Fig. 13ņØä ņé┤ĒÄ┤ļ│┤ļ®┤ ņóīņĖĪņØĆ ņ╗©ĒģīņØ┤ļäłĒä░ ļ»ĖļäÉ ļé┤ņŚÉ ņĢ╝ļō£ ņÜ┤ņśü ņāüĒÖ®ņØä CCTVļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņé¼ņÜ®ņ×ÉĻ░Ć ņŻ╝ ĻĖ░ņĀüņ£╝ļĪ£ ņ×æņŚģ ņāüĒÖ®ņØä ņé┤ĒÄ┤ņĢ╝ ĒĢ£ļŗż.

ĻĘĖļ¤¼ļéś ņÜ░ņĖĪņØĆ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢśĻ▓ī ļÉśļ®┤ ņĢ╝ļō£ ļ¬©ļŗłĒä░ļ¦ü ņŗ£ņŖżĒģ£ņØä ĒåĄĒĢ┤ņä£ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņĢ╝ļō£ ņÜ┤ņśü ņāüĒÖ®ņØä ņēĮĻ▓ī ļ¬©ļŗłĒä░ļ¦ü ĒĢĀ ņłśĻ░Ć ņ׳ļŗż.
Fig. 14ļź╝ ņé┤ĒÄ┤ļ│┤ļ®┤ ņóīņĖĪņØĆ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ļé┤ņŚÉ ņĢ╝ļō£ ņØ┤ņåĪ ņןļ╣ä ņÜ┤ņśü ņāüĒÖ®ņØä ļ│┤Ļ│Āņ×É ĒĢĀ ļĢī ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņżæ YTļź╝ ņ¦ĆņĀĢ ĒĢśņŚ¼ ļ│┤Ļ│Āņ×É ĒĢĀ ļĢī YT ņÜ┤ņśü ņāüĒÖ®ņØä ļ¬©ļŗłĒä░ļ¦ü ĒĢĀ ņłśĻ░Ć ņ׳ļŗż. ņóīņĖĪņØĆ YT ņÜ┤ņśü ņāüĒÖ®ņØä CCTVļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņé¼ņÜ®ņ×ÉĻ░Ć ņŻ╝ĻĖ░ņĀü ņ£╝ļĪ£ ņ×æņŚģ ņāüĒÖ®ņØä ņé┤ĒÄ┤ņĢ╝ ĒĢ£ļŗż. ĻĘĖļ¤¼ļéś ņÜ░ņĖĪņØĆ ņĢ╝ļō£ ņ×ÉļÅÖĒÖö ņŗ£ ņŖżĒģ£ņØä ļÅäņ×ģĒĢśĻ▓ī ļÉśļ®┤ ņĢ╝ļō£ņŚÉņä£ņØś ņØ┤ļÅÖĒĢśļŖö YTņØś ņøĆņ¦üņ×äņØä DGPS ņ£äņ╣śņĀĢļ│┤ļź╝ ĒåĄĒĢśņŚ¼ ņĀĢĒÖĢĒ׳ ĒīīņĢģĒĢĀ ņłś ņ׳ņ£╝ļ®░, ĻĖ░ļ│ĖņĀüņ£╝ ļĪ£ YTņØś ņ£äņ╣śļź╝ ņĢ╝ļō£ ļ¬©ļŗłĒä░ļ¦ü ņŗ£ņŖżĒģ£ņØä ĒåĄĒĢ┤ņä£ ņŗżņŗ£Ļ░äņ£╝ļĪ£ YT ņÜ┤ņśü ņāüĒÖ®ņØä ņēĮĻ▓ī ļ¬©ļŗłĒä░ļ¦ü ĒĢĀ ņłś ņ׳ņØä ļ┐É ņĢäļŗłļØ╝ TOS ņŗ£ņŖżĒģ£ņŚÉņä£ ņĀüņŗ£ņŚÉ ņ×æņŚģņØä Ļ┤Ćļ”¼ĒĢĀ ņłś ņ׳ļÅäļĪØ ĒĢ┤ņŻ╝Ļ▓ī ļÉ£ļŗż. ļĖö ļĪØņØś ņ¦äņ×ģ ļ░Å TCņØś ņ×æņŚģ ņ£äņ╣śņŚÉ ļÅäņ░®ņĀĢļ│┤ļź╝ ĒÖĢņØĖĒĢśņŚ¼ TOSņŚÉ ņĀäļŗ¼ĒĢśĻ▓ī ļÉśļ®░, ĒĢäņÜöĒĢ£ Ļ▓ĮņÜ░ ņ×æņŚģņØä SwapņØ┤ Ļ░ĆļŖźĒĢśļÅäļĪØ ĒĢśņŚ¼ Ēä░ļ»ĖļäÉļé┤ņØś ņĢ╝ļō£ ņÜ┤ņśüņØä ņĄ£ņĀüĒÖö ĒĢĀ ņłś ņ׳ļŗż.

ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņ×æņŚģ ņ▓śļ”¼ ņä▒ļŖźņØĆ ņØ╝ļ░śņĀüņ£╝ļĪ£ ņŗ£Ļ░äļŗ╣ ņ╗© ĒģīņØ┤ļäł ņāØņé░ņä▒ ļ░Å Ļ▓īņØ┤ĒŖĖ ĒŖĖļ¤Ł Ēä┤ ņŗ£Ļ░äņ£╝ļĪ£ ĒÅēĻ░ĆļÉśĻ│Ā ņ׳ļŗż. ņŗ£ Ļ░äļŗ╣ ņ╗©ĒģīņØ┤ļäł ņāØņé░ņä▒ņØĆ ļ¬©ņäĀņØ┤ ņ×ģĒĢŁĒĢśņŚ¼ ņČ£ĒĢŁĒĢĀ ļĢīĻ╣īņ¦Ć ņ╗©Ēģī ņØ┤ļäłļź╝ ņ▓śļ”¼ĒĢśļŖö ņ×æņŚģļ¼╝ļ¤ēņ£╝ļĪ£ ņ┤Ø ņäĀņäØ ņāØņé░ņä▒, ņ┤Ø ņāØņé░ņä▒, ņł£ ņāØņé░ņä▒ņ£╝ļĪ£ ĻĄ¼ļČäĒĢśņŚ¼ ņāØņé░ņä▒ņØä ĒÅēĻ░ĆĒĢ£ļŗż. ņØ┤ļŖö ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä Ļ░Ć ņĀüĒĢśĻ▓ĮņÜ░ ņłśņČ£ ĒĢĀ ņ╗©ĒģīņØ┤ļäłļź╝ ņĢ╝ļō£ņŚÉņä£ ņØ┤ņåĪņןļ╣äĻ░Ć ļ¬©ņäĀĻ╣ī ņ¦Ć Ļ░ĆņĀĖļŗżņŻ╝ņ¢┤ņĢ╝ ĒĢśĻ│Ā, ņ¢æĒĢśĻ▓ĮņÜ░ ņłśņ×ģļīĆņāü ņ╗©ĒģīņØ┤ļäłļź╝ ļ¬©ņäĀņŚÉ ņä£ ņØ┤ņåĪņןļ╣äĻ░Ć ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĢ╝ļō£ņŚÉ ņןņ╣śĒĢśļŖö ņ×æņŚģņØ┤ļŗż. Ļ▓īņØ┤ĒŖĖ ĒŖĖļ¤Ł Ēä┤ ņŗ£Ļ░äņØĆ ņ╗©ĒģīņØ┤ļäłļź╝ ņŗżņØĆ ņ░©ļ¤ēņØ┤ Ļ▓īņØ┤ĒŖĖļź╝ ĒåĄ Ļ│╝ĒĢ┤ņä£ ņĢ╝ļō£ ļĖöļ¤Ł ņ¦ĆņĀĢņ£äņ╣śņŚÉ ņ╗©ĒģīņØ┤ļäł ņāüņ░© ļ░Å ĒĢśņ░©Ļ╣īņ¦Ć ņ×æ ņŚģ ņÖäļŻīņŗ£Ļ░äņØä ņØśļ»ĖĒĢ£ļŗż.
Fig. 15ļŖö 2017ļģä 10ņøöļČĆĒä░ 12ņøöĻ╣īņ¦Ć ņŻ╝Ļ░ä ļŗ©ņ£ä ņŗżņĀ£ ĻĄŁļé┤ ņÖĖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņŗ£Ļ░äļŗ╣ ņ╗©ĒģīņØ┤ļäł ņāØņé░ņä▒ ļ░Å Ļ▓īņØ┤ĒŖĖ Ēä┤ ņŗ£Ļ░äņØä ļ╣äĻĄÉ ļČäņäØ ļé┤ņÜ®ņØ┤ļŗż.

ņØ┤ļź╝ ņ×ÉņäĖĒ׳ ņé┤ĒÄ┤ļ│┤ļ®┤ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ļÅäņ×ģĒĢśņ¦Ć ņĢŖ ņØĆ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņŚÉ ļ╣äĒĢ┤ņä£ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØä ļÅäņ×ģĒĢśņŚ¼ ņ×æņŚģņØä ņ▓śļ”¼ĒĢśĻ▓ī ļÉśļ®┤ ņ┤Ø ņäĀņäØ ņāØņé░ņä▒ ĒÅēĻĘĀ ņĢĮ 55Ļ░£ ņØ┤ņāü, ņ┤Ø ņāØņé░ņä▒ ņĢĮ 6Ļ░£ ņØ┤ņāü, ņł£ ņāØņé░ņä▒ ņĢĮ 2Ļ░£ ņØ┤ņāü, Ļ▓īņØ┤ĒŖĖ ĒŖĖļ¤Ł Ēä┤ ņŗ£Ļ░ä ņĢĮ 4ļČä ņØ┤ņāü Ļ░üĻ░ü ņóŗņĢä ņĪīļŗżļŖö Ļ▒Ė ņĢī ņłśĻ░Ć ņ׳ņŚłļŗż.
ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņĢ╝ļō£ļé┤ ņ╗©ĒģīņØ┤ļäłļź╝ ĒĢĖļōżļ¦ü ĒĢśļŖö ņØ┤ņåĪņן ļ╣ä(TC, RS, YT)ņØś ņĀĢĒÖĢĒĢ£ ņ£äņ╣śļź╝ ĒīīņĢģĒĢ©ņ£╝ļĪ£ņŹ© Ļ░Ćņן ņĀüĒĢ®ĒĢ£ ņ£äņ╣śņØś ņןļ╣äņŚÉ ņĢ╝ļō£ ļĖöļ¤ŁņØä ĒĢĀļŗ╣ĒĢśņŚ¼ Ēä░ļ»ĖļäÉ ņÜ┤ņśüņØä ņĄ£ņĀüĒÖö ĒĢĀ ņłś ņ׳ļŖö ņŗ£ņŖżĒģ£ņØ┤ļ®░ Ēśäņ×¼ ņÜ┤ņśüļÉśĻ│Ā ņ׳ļŖö ņØ┤ņåĪņןļ╣äļōżņØś ņ£ä ņ╣śļź╝ ņŗżņŗ£Ļ░ä ļ¬©ļŗłĒä░ļ¦üņØ┤ Ļ░ĆļŖźĒĢśņŚ¼ ņ╗©ĒģīņØ┤ļäł ĒĢĖļōżļ¦ü ņØ┤ņåĪņןļ╣ä ņŚÉ ļīĆĒĢ£ ņÜ┤ņśüņØś ĒÜ©ņ£©ņä▒ņØä ļåÆņØ╝ ņłś ņ׳ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ĒĢĄņŗ¼ ņןļ╣äņØĖ ņØ┤ņåĪņןļ╣äņØś ĒÜ©ņ£©ņĀüņØĖ ņÜ┤ņśüņØä ņ£äĒĢ┤ņä£ ņĄ£ņĀüņØś ņ×ÉļÅÖĒÖö ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£ņØä ņØ┤ ņÜ®ĒĢśĻ▓ī ļÉśļ®┤ ņĢ╝ļō£ ņÜ┤ņśü ņāüĒÖ®ņØä CCTVļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņé¼ņÜ®ņ×ÉĻ░Ć ņŻ╝ĻĖ░ņĀüņ£╝ļĪ£ ņ×æņŚģ ņāüĒÖ®ņØä ļ│┤ņ¦Ć ņĢŖĻ│Ā ņĢ╝ļō£ ļ¬©ļŗłĒä░ļ¦ü ņŗ£ņŖżĒģ£ņØä ĒåĄĒĢ┤ņä£ ņŗżņŗ£Ļ░äņ£╝ļĪ£ ņĢ╝ļō£ ņØ┤ņåĪņןļ╣äņØś ņĢ╝ļō£ ņÜ┤ņśü ņāüĒÖ®ņØä ņēĮĻ▓ī ļ¬©ļŗłĒä░ļ¦ü ĒĢĀ ņłś ņ׳ņØä ļ┐É ņĢäļŗłļØ╝ TOS ņŗ£ņŖżĒģ£ņŚÉņä£ ņĀüņŗ£ņŚÉ ņ×æņŚģ Ļ┤Ćļ”¼Ļ░Ć Ļ░ĆļŖźĒĢśņŚ¼ ļĖöļĪØņØś ņ¦äņ×ģ ļ░Å ņØ┤ņåĪņןļ╣äņØś ņ×æņŚģ ņ£äņ╣śņŚÉ ļÅä ņ░®ņĀĢļ│┤ļź╝ ĒÖĢņØĖĒĢśņŚ¼ TOSņŚÉ ņĀäļŗ¼ĒĢśĻ▓ī ļÉśļ®░, ĒĢäņÜöĒĢ£ Ļ▓ĮņÜ░ ņ×æņŚģ ņØä SwapņØ┤ Ļ░ĆļŖźĒĢśļÅäļĪØ ĒĢśņŚ¼ Ēä░ļ»ĖļäÉļé┤ņØś ņĢ╝ļō£ ņÜ┤ņśüņØä ņĄ£ņĀüĒÖö ĒĢĀ ņłś ņ׳ļŗż. ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉņØś ņāØņé░ņä▒ ļ░Å ņØ┤ņåĪņןļ╣äņØś ĒÜ©ņ£©ņä▒ ņØä ņóĆ ļŹö ļåÆņØ╝ ņłś ņ׳ļŗżļŖö Ļ▒Ė ņĢī ņłśĻ░Ć ņ׳ņŚłļŗż.
Ē¢źĒøä ņŚ░ĻĄ¼ļīĆņāüņ£╝ļĪ£ļŖö ļ│ĖņäĀ ņØ┤ņåĪņןļ╣ä(GC)ņŚÉņä£ ņ╗©ĒģīņØ┤ļäłņØś ņ¢æĒĢś, ņĀüĒĢś ņŗ£ Optical Character Reader(OCR) ņ╣┤ļ®öļØ╝Ļ░Ć ņ╗©Ēģī ņØ┤ļäł ļ▓łĒśĖļź╝ ņ×ÉļÅÖņ£╝ļĪ£ ņ┤¼ņśüĒĢśĻ│Ā ņØĖņŗØĒĢśņŚ¼ ņ╗©ĒŖĖļĪż ņä╝Ēä░ņŚÉ ņØĖņŗØ ļÉ£ Ļ▓░Ļ│╝ Ļ░ÆņØä ņĀäņåĪĒĢśļŖö ņŗ£ņŖżĒģ£ņ£╝ļĪ£ 24ņŗ£Ļ░ä ņÜ┤ņśüĻ░ĆļŖźņ£╝ļĪ£ ņØĖĒĢ£ ņØĖĻ▒┤ļ╣ä ņĀłĻ░É ļ░Å ņŚģļ¼┤ ĒÜ©ņ£©ņä▒ ņ”ØļīĆņŚÉ Ēü░ ĒÜ©Ļ│╝ļź╝ ņżä Ļ▓āņ£╝ļĪ£ ĻĖ░ ļīĆļÉ£ļŗż.
ļ│Ė ņŚ░ĻĄ¼ļŖö ņØ┤ņåĪņןļ╣ä Terminal Operating System(TOS) ņĀü ņÜ® ņĢīĻ│Āļ”¼ņ”ś ņäĖļ░ĆĒĢ£ ņäżļ¬ģņØ┤ ļČĆņĪ▒Ē¢łņ£╝ļ®░, ņłśļÅÖ ņ╗©ĒģīņØ┤ļäłĒä░ļ»ĖļäÉ ņØä ļīĆņāüņ£╝ļĪ£ DGPSļź╝ ņäżņ╣śĒĢśņŚ¼ ņäżņ╣ś ņĀä ņØ┤ņåĪņןļ╣ä ņŗ£ņŖżĒģ£Ļ│╝ ņäżņ╣ś Ēøä ņØ┤ņåĪņןļ╣ä ņ×ÉļÅÖĒÖö ņŗ£ņŖżĒģ£ņØś ļ╣äĻĄÉ ļČäņäØņØä ņ£äĒĢ£ ņ×ÉļŻī ņłśņ¦æ ņĀ£ņĢĮņ£╝ļĪ£ ņĀĢļ░ĆĒĢśņ¦Ć ļ¬╗ĒĢ£ ņŚ░ĻĄ¼ņØś ĒĢ£Ļ│äļź╝ Ļ░¢Ļ│Ā ņ׳ļŗż.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






