

ýäť Űíá
ÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöŰŐö ýäáŰ░ĽýŁś ýťäý╣ś, ýćŹŰĆä, ý╣ĘŰíť Űô▒ ýäáŰ░ĽýŁś ÝĽşÝĽ┤ ýáĽŰ│┤Űą╝ ÝÜŹŰôŁÝĽśŰŐö ý׹Ű╣äŰíťýŹĘ ýĽłýáäÝĽť ÝĽ┤ýâü ŕÁÉÝćÁ ŕ┤ÇŰŽČŰą╝ ýťäÝĽ┤ ÝĽ┤ ýâüŕÁÉÝćÁŕ┤ÇýáťýőťýŐĄÝůťýŚÉ ÝÖťýÜęŰÉśŕ▒░Űéś(Kim, 2013), ŕÁ░ýŚÉýäťŰŐö ýťáŰĆäŰČ┤ ŕŞ░ýőĄýéČŕ▓ę ýőťÝŚś ýáä ÝĽ┤ýâüýćîŕ░ť ýâüÝÖęýŁä ÝîÉŰőĘÝĽśŕŞ░ ýťäÝĽ┤ ýáüýÜęŰÉśŕŞ░ŰĆä ÝĽťŰőĄ(Hwang, 2012). ŰśÉÝĽť ÝĽ┤ýĽłŕ░ÉýőťŕŞ░ŰŐąýť╝Űíť ýáäŰ░ęÝĽ┤ýŚşýŚÉ ý╣ĘÝłČ ÝĽśŰŐö ýáüýŁś ýäáŰ░ĽýŁ┤Űéś ÝĽĘýἠŰô▒ýŁä ýőĄýőťŕ░äýť╝Űíť ÝâÉýžÇÝĽśŰŐö ý×äŰČ┤Űą╝ ýłśÝľëÝĽťŰőĄ. ÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöŰŐö ŰîÇŕ│Á ÝâÉýâë Ű░Ć ýÂöýáüŰáłýŁ┤ŰŹöýÖÇ ŰőČŰŽČ 2ý░ĘýŤÉ ŰáłýŁ┤ŰŹöŰíťýŹĘ ÝĹťýáüýŁś ŕ│áŕ░üýŁä ýáťýÖŞÝĽť ŕ▒░ŰŽČýÖÇ Ű░ęýťäŕ░üŰžîýŁä ýŞíýáĽÝĽťŰőĄ(Byron, 1996). ÝĹťýáüýŁś ýáĽÝÖĽÝĽť Ű░ęýťäŕ░ü ýáĽŰ│┤Űą╝ ÝÜŹŰôŁÝĽś ŕŞ░ ýťäÝĽ┤ýäťŰŐö ýĽłÝůîŰéśŕ░Ç ý┤łŕŞ░ ýťäý╣śÝĽť ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░ü ýáĽŰ│┤Űą╝ ýĽîŕ│á ý׳ýľ┤ýĽ╝ ÝĽťŰőĄ. ŕ│áýáĽÝśĽ ÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöýŁś ŕ▓ŻýÜ░ ýäĄý╣ś ýőť ý┤ł ŕŞ░ ýäĄýáĽŰÉť ýäáýłśŰ░ęýťäŕ░üýŁä ýťáýžÇÝĽśŰéś, Ű│Ş Űů╝ŰČŞýŁś ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░Éýőť ŰáłýŁ┤ŰŹöŰŐö ýŁ╝Ű░śýáüýŁŞ ŕ│áýáĽÝśĽýŁś ÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöýÖÇ ŰőČŰŽČ ý░ĘŰčëýťä ýŚÉ ýäĄý╣śÝĽśýŚČ ýáäŕ░ťýžÇŰą╝ ýŁ┤ŰĆÖÝĽśŰę░ ýÜ┤ýÜęýŁ┤ ŕ░ÇŰչݼ┤ýĽ╝ ÝĽĘýť╝Űíť, ýáä ŕ░ťýžÇŕ░Ç Ű░öŰÇö ŰĽî ŰžłŰőĄ, ý░ĘŰčëýŁś ýäáýłś Ű░ęÝľąýŁ┤ ýőáýćŹÝĽśŕ▓î Ű░śýśüŰÉśŰŐö ŕ▓âýŁ┤ ÝĽäýÜöÝĽśŰőĄ. ýáĽŰ░ÇÝĽť ýäáýłśŰ░ęýťäŕ░üýŁä ýľ╗ŕŞ░ ýťäÝĽ┤ýäť ŕ│áýä▒ŰŐąýŁś ý×ÉýŁ┤ŰíťýŐĄýŻöÝöäŰą╝ ýáüýÜęÝĽť ý×ÉŰĆÖÝĽşŰ▓Ľý׹ý╣śŰą╝ ýéČýÜęÝĽá ýłś ý׳ýžÇŰžî, ŕ│á ŕ░ÇýŁ┤Űę░, ý׹ýőťŕ░äýŁś ýĽłýáĽÝÖö ýőťŕ░äýŁ┤ ÝĽäýÜöÝĽśŕ│á, Ýü░ ŰÂÇÝö╝Űíť ýŁŞÝĽśýŚČ ýäĄý╣śŕ│Áŕ░äýŁ┤ ÝÖĽŰ│┤ ŰÉśýľ┤ýĽ╝ ÝĽśŰŐö ýáťýĽŻýŁ┤ ý׳ŰőĄ(Hong, 2008). Űö░ ŰŁ╝ýäť ŰőĘýžÇ ýáłŰîÇ Ű░ęýťäŕ░ü ÝÜŹŰôŁŰžîýŁ┤ ۬ęýáüýŁ┤ŰŁ╝Űę┤ ŕ░Çŕ▓ęýŁ┤ ýáÇŰá┤ÝĽś ŕ│á, ýćîÝśĽýŁ┤Űę░, ýĽłýáĽÝÖö ýőťŕ░äýŁ┤ ýžžýŁÇ ýáäý×É ý╗┤ÝŹ╝ýŐĄŰą╝ ÝÖťýÜęÝĽá ýłś ý׳ŰőĄ. ÝĽśýžÇŰžî, ýáäý×É ý╗┤ÝŹ╝ýŐĄŰŐö ýžÇŕÁČ ý×ÉŕŞ░ý׹ýŁä ýŁ┤ýÜęÝĽśŰŐö ýžÇý×Éŕ│ä ýä╝ýäťý×äýť╝Űíť ýÖŞŰÂÇ ý×ÉŕŞ░ ÝÖśŕ▓ŻýŁś ýśüÝľąýť╝Űíť ýśĄý░Ęŕ░Ç Ű░ťýâŁÝĽá ýłś ý׳ ýť╝Űę░, Ű░ťýâŁŰÉť ýśĄý░ĘŰŐö Ű░ęýťäŕ░ü ýáĽÝÖĽŰĆäŰą╝ ŰľĘýľ┤ŰťĘŰŽČŰŐö ýÜöýŁŞýŁ┤ ŰÉá ýłś ý׳ŰőĄ(Kim, 2006; Zhang, 2010). Űö░ŰŁ╝ýäť ÝâÇ ýőťýŐĄÝůťýť╝ŰíťŰÂÇÝä░ ÝÜŹŰôŁŰÉť ýú╝Ű│ÇÝĹťýáüýŁś ýťäý╣śýáĽŰ│┤ýÖÇ ŰáłýŁ┤ŰŹö ýŞíýáĽŕ░ĺýŁä Ű╣äŕÁÉÝĽśýŚČ ýśĄ ý░ĘŰą╝ Ű│┤ýáĽÝĽśŰŐö ŕŞ░Ű▓ĽýŁ┤ ýú╝Űíť ýŚ░ŕÁČŰÉśýľ┤ ýÖöŰőĄ(Beasda, 2002). ŕĚŞ ŰčČŰéś ýŁ┤ŰĆÖÝśĽýŁś ŰáłýŁ┤ŰŹöýŁŞ ŕ▓ŻýÜ░ ýáäŕ░ťýžÇ ýŁ┤ŰĆÖ ýőť ýú╝Ű│ÇýžÇýŚşýŁś ýἠŰ│┤Űą╝ ŰőĄýőť ýłśýžĹÝĽ┤ýĽ╝ÝĽśŰŐö ŰÂłÝÄŞÝĽĘýŁ┤ ýí┤ý×ČÝĽťŰőĄ.
Ű│Ş Űů╝ŰČŞýŚÉýäťŰŐö ŰĘ╝ýáÇ ýůÇÝä░ Űé┤ ýú╝Ű│Ç ýáäý×Éý׹Ű╣äýŁś ýÜ┤ýÜęýŚÉ Űö░ŰąŞ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ý×Éý׹ ýśüÝľąýä▒ýŁä ÝÖĽýŁŞÝĽśŕ│á, ýäĄý╣śýťäý╣śŰą╝ ýäáýἠݍä, ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöýÖÇ ýáĽýžÇýťäýä▒ýŁś ŕ▓ŻýťäŰĆä ýáĽŰ│┤Űą╝ ÝÖťýÜęÝĽśýŚČ ýŞíýžÇÝĽÖýáü ýŚş ŰČŞýáť ÝĽ┤ýäŁýŁä ÝćÁÝĽ┤ ŕŞ░ýĄÇŰ░ęýťäŕ░üýŁä ýé░ýݼśŕ│á, ýťäýä▒ ýĽłÝůîŰéśŕ░Ç ýőĄýáť ýžÇÝľąÝĽť Ű░ęýťäŕ░üŕ│╝ Ű╣äŕÁÉÝĽśýŚČ Ű│┤ýáĽŕ░ĺýŁä ýé░ýݼśýŚČ ý×ÉŰĆÖýáüýť╝Űíť ŰáłýŁ┤ŰŹöýŚÉ Ű░śýśüÝĽśŰŐö ý×ÉŰĆÖŰ│┤ýáĽýáłý░ĘŰą╝ ýáťýĽłÝĽťŰőĄ. ýŁ┤ Űą╝ ýőĄýáť ýÜ┤ýÜęýĄĹýŁŞ ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöýŚÉ ýáüýÜęÝĽśýŚČ ŕ░ťýäáÝÜĘ ŕ│╝ Ű░Ć ýÜ┤ýÜę ÝÄŞŰŽČýä▒ýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ.
ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýáüýÜę
2.1. ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýŚşÝĽá
ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöŰŐö ý░ĘŰčëýŚÉ ÝâĹý×ČÝĽśýŚČ ýáäŕ░ťýžÇŰą╝ ýŁ┤ŰĆÖÝĽś Űę┤ýäť, ÝĽ┤ýâüÝĹťýáüýŁś ŕ▒░ŰŽČ Ű░Ć Ű░ęýťäŕ░üýŁä ÝâÉýžÇÝĽśŕ│á ÝÜŹŰôŁŰÉť ýáĽŰ│┤Űą╝ ýťäýä▒ýŁä ÝćÁÝĽ┤ ÝâÇŰČ┤ŕŞ░ý▓┤ŕ│äýÖÇ ŕ│ÁýťáÝĽśŰŐö ýőťýŐĄÝůťýŁ┤ŰőĄ. ýťäýä▒ Ű░Ć Űáł ýŁ┤ŰŹöýŁś ýĽłÝůîŰéśŰŐö ŕÁČŰĆÖ ýáä ÝĽşýőť ý░ĘŰčëýŁś ýäáýłśŰ░ęÝľąýť╝Űíť ýáĽŰáČŰÉśýľ┤ ý׳ŕŞ░ ŰĽîŰČŞýŚÉ, Ýśäý×ČýŁś ý░ĘŰčëýŁś ýäáýłśŰ░ęÝľąýŁä ýĽîýĽäýĽ╝ ýĽłÝůîŰéśŕ░Ç ýťä ý╣śÝĽť Ű░ęýťäŕ░ü Ű░Ć ŕĚŞ ýťäý╣śŰíťŰÂÇÝä░ ÝâÉýžÇŰÉť ÝĹťýáüýŁś ýáłŰîÇ Ű░ęýťäŕ░üýŁä ýĽî ýłś ý׳ŰőĄ. ÝĽśýžÇŰžî, ý░ĘŰčëýŁś ýäáýłśŰ░ęÝľąýŁÇ ŕ│áýáĽŰÉśýľ┤ ý׳ýžÇ ýĽŐŕ│á, ýŁ┤ŰĆÖ ÝŤä ýáäŕ░ť ýőť ýú╝ýáĽý░ĘŰ░ęÝľąýŚÉ Űö░ŰŁ╝ Ű│Çŕ▓ŻŰÉĘýť╝Űíť ýłśýőťŰíť ý░ĘŰčë ýŁś ýäáýłśŰ░ęýťäŕ░üýŁä ÝÜŹŰôŁÝĽśŰŐö ŕ▓âýŁ┤ ÝĽäýÜöÝĽśŰőĄ. ýŁ┤Űą╝ ýťäÝĽ┤ ýáäý×É ý╗┤ ÝŹ╝ýŐĄŕ░Ç ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░üýŁä ÝÜŹŰôŁÝĽśŰŐö ýŚşÝĽáýŁä ýłśÝľëÝĽťŰőĄ. ÝÜŹŰôŁ ŰÉť Ű░ęýťäŕ░üýŁÇ ýžäŰÂüýŁä ŕŞ░ýĄÇýť╝ŰíťÝĽť ýáłŰîÇŰ░ęýťäŕ░üý×äýť╝Űíť ÝâÇ ŰČ┤ŕŞ░ý▓┤ ŕ│äýÖÇ ÝâÉýžÇŰÉť ۬ęÝĹťýŁś ýáĽŰ│┤Űą╝ ŕ│ÁýťáÝĽá ýłś ý׳ýť╝Űę░, ŰśÉÝĽť Ýśäý×Č ý░ĘŰčë ýŁś ýťäý╣śýŚÉýäť ýťäýä▒ýŁä ý×ÉŰĆÖýÂöýáüÝĽśŕŞ░ ýťäÝĽť ŕŞ░ýĄÇýť╝ŰíťŰĆä ÝÖťýÜęŰÉťŰőĄ.
2.2. ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýśĄý░ĘŰ░ťý⣠ýśüÝľą
ýžÇý×Éŕ│ä ýä╝ýäťŰą╝ ýéČýÜęÝĽśŰŐö ýáäý×É ý╗┤ÝŹ╝ýŐĄŰŐö ý×Éý░ĘŰéś ÝÄŞý░ĘýŚÉ ýŁś ÝĽ┤ ýśĄý░Ęŕ░Ç Ű░ťýâŁÝĽťŰőĄ(Hong, 2008). ýžÇŕÁČ ý×ÉŕŞ░ý׹ýŁ┤ ŕ░ÇŰŽČÝéĄŰŐö ŰÂü ý¬Ż, ýŽë ý×ÉŰÂüŕ│╝ ýžÇŕÁČýŁś ý×ÉýáäýÂĽýŁŞ ýžäŰÂüŕ░äýŁś ýťäý╣ś ý░ĘýŁ┤Űíť ÝÄŞý░Ęŕ░Ç Ű░ťýâŁÝĽśŕ▓î ŰÉśŰę░, ŰśÉÝĽť, ý×ÉŕŞ░ ý╗┤ÝŹ╝ýŐĄ Űé┤ýŁś ý×Éýä▒ý▓┤ýŁś ýśüÝľąýť╝Űíť ý╗┤ ÝŹ╝ýŐĄýŁś ŰÂüý¬Żŕ│╝ ýőĄýáť ý×ÉŰÂüŕ░äýŚÉŰĆä ý×Éý░Ęŕ░Ç Ű░ťýâŁÝĽśŕŞ░ŰĆä ÝĽťŰőĄ. ýŁ┤ ŰŐö ýőťŕ░äýŁś ŕ▓Żŕ│╝ Ű░Ć ýžÇýŚşýŁś ýŁ┤ŰĆÖýŚÉ Űö░ŰŁ╝ýäťŰĆä ŰőČŰŁ╝ýžäŰőĄ. ŰśÉÝĽť, ýžÇŕÁČý×ÉŕŞ░ý׹ ýÖŞýŚÉ ýú╝Ű│Ç ý×Éýä▒ý▓┤ýŚÉ ýŁśÝĽť ýÖŞŰÂÇý×Éý׹ýŁś Ű│ÇÝÖöŰíť ýŁŞÝĽ┤ Ű░ťýâŁŰÉśŰŐö Hard ironÝÜĘŕ│╝ýÖÇ Soft ironÝÜĘŕ│╝Űíť ýśĄý░Ęŕ░Ç Ű░ťýâŁÝĽśŕŞ░ ŰĆä ÝĽťŰőĄ(Markovic, 2010).
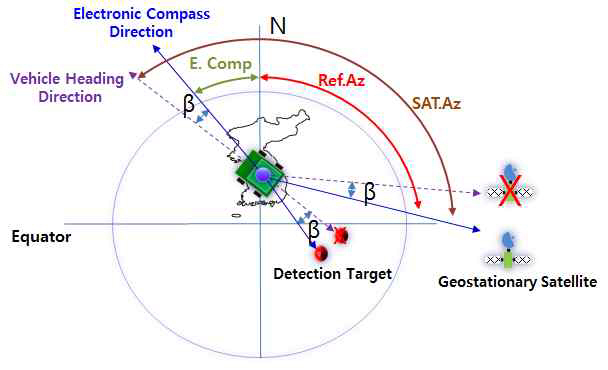
ýáäý×É ý╗┤ÝŹ╝ýŐĄýŚÉýäť Ű░ťýâŁŰÉť ýśĄý░ĘŰŐö ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹö ýÜ┤ ýÜę ýőť ý┤łŕŞ░ ýťäýä▒ýŁś ý×ÉŰĆÖýÂöýáü Ű░Ć ÝĹťýáüýŁś ÝâÉýžÇýáĽÝÖĽŰĆäýŚÉ ýśüÝľąýŁä Ű»Şý╣ťŰőĄ. ýťäýä▒ý׹Ű╣äŰŐö ýáäýŤÉýŁŞŕ░Ç ÝŤä ýťäýä▒ýÂöýáü ýőť, ýŁ┤ýáäýŚÉ ýÂöýáüŰÉť Ű░ęýťäŕ░ü ýáĽŰ│┤Űą╝ ŕŞ░ýľÁÝĽśýśÇŰőĄŕ░Ç ŕĚŞ ýťäý╣śýŚÉýäť ýťäýä▒ýÂöýáüýŁä ýőťý×ĹÝĽś ŕ▓î ŰÉťŰőĄ. ÝĽśýžÇŰžî, ýáäŕ░ťýžÇŕ░Ç Ű░öŰÇîýľ┤ýäť ý░ĘŰčëýŁś ýäáýłśŰ░ęÝľąýŁ┤ Ű░öŰÇî Űę┤, ýťäýä▒ ýÂöýáü ýőťý×ĹýáÉýŁ┤ ŰőČŰŁ╝ýžÉýť╝Űíť, ýáäý×É ý╗┤ÝŹ╝ýŐĄŰíťŰÂÇÝä░ ýÁťýőá ÝÖöŰÉť ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░ü ýáĽŰ│┤Űą╝ Ű░ŤýĽäýäť, ýŁ┤ýáäýŁś ý░ĘŰčë ýäáýłśŰ░ę ýťäŕ░üŕ│╝ýŁś ý░ĘýŁ┤Űą╝ ŕ░ÉýĽłÝĽť ýťäý╣śýŚÉýäť ýáĽýžÇýťäýä▒ýŁä ý×ÉŰĆÖ ýÂöýáüÝĽĘýť╝ ŰíťýŹĘ ýÂöýáüýőťŕ░äýŁä ýĄäýŁ┤ŕ▓î ŰÉťŰőĄ. ŰžîýĽŻ, Fig. 1ŕ│╝ ŕ░ÖýŁ┤ ýáäý×É ý╗┤ÝŹ╝ ýŐĄŕ░Ç ╬▓ŕ░üŰĆäŰžîÝü╝ ýśĄý░Ęŕ░Ç Ű░ťýâŁÝĽśŰę┤, ýťäýä▒ýĽłÝůîŰéśŰŐö ╬▓ŕ░üŰĆäŰžîÝü╝ ÝőÇýľ┤ýžä Ű░ęýťäŕ░üýŚÉýäť ýáĽýžÇýťäýä▒ýŁä ýžÇÝľąÝĽśŕ▓î ŰɜۻÇŰíť ýőáýćŹÝĽśŕ▓î ýťä ýä▒ýŁä ý×ÉŰĆÖ ýÂöýáüÝĽśŰŐö ŕ▓âýŁ┤ ýľ┤ŰáÁŕ▓î ŰÉťŰőĄ. ŰśÉÝĽť, ŰáłýŁ┤ŰŹöýŚÉýäť ÝâÉýžÇ ŰÉť ÝĹťýáüýŁ┤ ŰŹ░ýŁ┤Ýä░ý▓śŰŽČ Ű░Ć ýáäýőťŕŞ░ýŚÉ ýáäýőť ýőť ýáäý×É ý╗┤ÝŹ╝ýŐĄýŚÉ Ű░ť ýâŁŰÉť ýśĄý░Ęŕ░Ç ÝâÉýžÇ ÝĹťýáüýŁś Ű░ęýťäŕ░üýŚÉ Ű░śýśüŰÉĘýť╝Űíť ÝâÉýžÇýáĽÝÖĽŰĆäŰą╝ ŰľĘýľ┤ŰťĘŰŽČŕ▓î ŰÉťŰőĄ. Űö░ŰŁ╝ýäť ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░ĘŰą╝ ýÁťýćîÝÖöÝĽśŰŐö ŕ▓âýŁ┤ ýĄĹýÜöÝĽśŰőĄ.
2.3. ýú╝Ű│Çý׹Ű╣ä ý×ĹŰĆÖýŁś ýśüÝľąýä▒ ÝÖĽýŁŞ
ýůÇÝä░ Űé┤ ýú╝Ű│Çýáäý×Éý׹Ű╣äýŁś ýÜ┤ýÜę ýőť ýÖŞŰÂÇ ý×ÉŕŞ░ý׹ýŁś Ű│ÇÝÖöŰíť ý×É ýŁ┤Űíť ý╗┤ÝŹ╝ýŐĄýŁś Ű░ęýťäŕ░ü ýáĽÝÖĽŰĆäŕ░Ç Ű░ŤŰŐö ýśüÝľąýä▒ýŁä ÝÖĽýŁŞÝĽśŕŞ░ ýťäÝĽś ýŚČ, Table 1ŕ│╝ ŕ░ÖýŁ┤ ý׹Ű╣äýÜ┤ýÜę ýőť ýůÇÝä░ Űé┤ ýú╝Ű│Çý×Éý׹ Ű│ÇÝÖöýŚÉ ŕ░Ç ý׹ ýśüÝľąýŁä Ű»Şý╣á ŕ▓âýť╝Űíť ÝîÉŰőĘŰÉśŰŐö ŰáłýŁ┤ŰŹö ýáäýŤÉŰÂÇ, ýĽłÝůîŰéś ŕÁČŰĆÖ ŰÂÇ Ű░Ć ŰáłýŁ┤ŰŹö ýćíýłśýőáŰÂÇŕ░Ç ýťäý╣śÝĽť ýůÇÝä░ ýĽ×ý¬ŻýŚÉ ýáäý×É ý╗┤ÝŹ╝ýŐĄŰą╝ ýäĄý╣śÝĽť ŕ▓ŻýÜ░ýÖÇ ýáäýőťŕŞ░ Űô▒ ýůÇÝä░ Űé┤ ÝâÇ ý׹Ű╣äýÖÇýŁś ýäĄý╣śŕ░äýäşýŁ┤ ýáü ýť╝Űę┤ýäť ŰáłýŁ┤ŰŹö ŕÁČýä▒ý׹Ű╣äýÖÇ ýŁ┤ŕ▓ę ŕ▒░ŰŽČŕ░Ç ŕ░Çý׹ ŰĘ╝ ý▓ťý׹ ýĄĹýĽÖýŚÉ ýäĄý╣śÝĽśýśÇýŁä ŕ▓ŻýÜ░ýŚÉ ŰîÇÝĽ┤ ý׹Ű╣ä ŰĆÖý×ĹýŚÉ Űö░ŰąŞ Ű░ęýťäŕ░ü ýśĄý░ĘŰ░ťý⣠Ű▓öýťäŰą╝ ÝÖĽýŁŞÝĽśýśÇŰőĄ.
Table 1
The error of the electric compass from other device operation
ýáäý×É ý╗┤ÝŹ╝ýŐĄŕ░Ç ŰáłýŁ┤ŰŹö ŕÁČýä▒ý׹Ű╣äŕ░Ç Ű¬ĘýŚČ ý׳ŰŐö ýůÇÝä░ ýĽ×ý¬ŻýŚÉ ýäĄý╣śŰÉśýľ┤ ý׳ýŁä ŕ▓ŻýÜ░, ŰáłýŁ┤ŰŹö ŕÁČŰĆÖ ýőť ýú╝Ű│Ç ý×ÉŕŞ░ýśüÝľąýť╝Űíť ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░Ęŕ░Ç ýÁťŰîÇ 10.6┬░ŕ╣îýžÇ Ű░ťýâŁŰÉĘýŁä ÝÖĽýŁŞÝĽá ýłś ý׳ýŚłŰőĄ. Ű░śŰę┤, ýůÇÝä░ Űé┤ ýáäý×Éý׹Ű╣äŰíťŰÂÇÝä░ ŕ░Çý׹ ŰľĘýľ┤ýžä ý▓ťý׹ ýĄĹýĽÖýŚÉ ýäĄý╣ś ŰÉśýŚłýŁä ŕ▓ŻýÜ░ýŚÉŰŐö Ű░ťýâŁÝÄŞý░Ęŕ░Ç 1┬░Űíť ŕ░Çý׹ Űé«ŕ▓î Ű░ťýâŁŰÉĘýŁä ýĽî ýłś ý׳ŰőĄ. Űö░ŰŁ╝ýäť ýáäý×Éý╗┤ÝŹ╝ýŐĄŰŐö ýäĄý╣ś ýťäý╣śýŚÉ Űö░ŰŁ╝ ýú╝Ű│Ç ýáäý×Éý׹Ű╣ä ýŁś ŕÁČŰĆÖýŚÉ ýśüÝľąýŁä Ű░ŤýŁîýŁä ýĽî ýłś ý׳ŰőĄ. ŰžîýĽŻ ýůÇÝä░ Űé┤ ýú╝Ű│Çý׹Ű╣ä ýŚÉýäť Ű░ťýâŁŰÉśŰŐö ý×ÉŕŞ░ ýśüÝľąýä▒ýŁä ŕ│áŰáĄÝĽśýžÇ ýĽŐŕ│á, ýáäý×É ý╗┤ÝŹ╝ýŐĄŕ░Ç ýäĄý╣śŰÉťŰőĄŰę┤, ŕĚŞŰíť ýŁŞÝĽ┤ Ű░ťýâŁŰÉť ýśĄý░Ęŕ░Ç ýőťýŐĄÝůťýŁä ýśĄý×ĹŰĆÖ ýőťÝéČ ýłś ý׳ýť╝Ű»ÇŰíť ýäĄý╣ś ýáä ýú╝Ű│Çý׹Ű╣äýŁś ý×ÉŕŞ░ýśüÝľąýä▒ýŁä ÝÖĽýŁŞÝĽśŕ│á ýäĄý╣ś ýťäý╣śŰą╝ ýäáýáĽÝĽśŰŐö ŕ▓âýŁ┤ ýĄĹýÜöÝĽśŰőĄ.
2.4. ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýŚ░ŰĆÖ(ŕ░ťýäá ýáä)
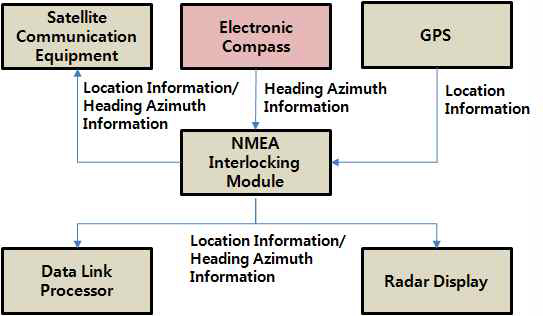
ŕ░ťýäá ýáä ýáäý×É ý╗┤ÝŹ╝ýŐĄýÖÇ ÝâÇ ý׹Ű╣äŕ░äýŁś ýŚ░ŰĆÖÝŁÉŰŽäýŁÇ Fig. 2ýÖÇ ŕ░ÖýŁ┤, ýáäý×É ý╗┤ÝŹ╝ýŐĄŰíťŰÂÇÝä░ ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░üýáĽŰ│┤ýÖÇ GPSŰíťŰÂÇ Ýä░ ý░ĘŰčëýŁś ýťäý╣śýáĽŰ│┤Űą╝ ýłśýőáÝĽťŰőĄ. ýłśýőáŰÉť ýáĽŰ│┤ŰŐö NMEAýŚ░ŰĆÖŰ¬Ę ŰôłýŁä ÝćÁÝĽ┤ ýáäýćíŕĚťŕ▓ęýť╝Űíť Ű│ÇÝÖśŰÉśýľ┤ ÝâÇ ý׹Ű╣äŰíť ýáäýćíÝĽśŕ▓î ŰÉťŰőĄ. ýťäýä▒ÝćÁýőáý׹Ű╣äŰŐö ýłśýőáŰÉť ýťäý╣śýáĽŰ│┤ýÖÇ ýäáýłśŰ░ęýťäŕ░üýáĽŰ│┤Űą╝ Ű░öÝâĽýť╝ Űíť Ýśä ýťäý╣śýŚÉýäť ýÂöýáüÝĽ┤ýĽ╝ ÝĽá ýťäýä▒ŕ╣îýžÇýŁś Ű░ęýťäŕ░üýŁä ŕ│äýé░ÝĽśýŚČ, ýťäýä▒ýĽłÝůîŰéśýŁś ý┤łŕŞ░ŕÁČŰĆÖ Ű▓öýťäŰą╝ ŕ▓░ýáĽÝĽťŰőĄ. ŰśÉÝĽť ŰáłýŁ┤ŰŹöý׹Ű╣äýŁŞ ŰŹ░ýŁ┤Ýä░ŰžüÝüČý▓śŰŽČŕŞ░ýÖÇ ýáäýőťŕŞ░ŰŐö ýŁ┤Űą╝ ŕŞ░ýĄÇýť╝Űíť ýžäŰÂüŰ░ęÝľąŰîÇŰ╣ä ÝĹťýáüýŁś Ű░ęýťäŕ░ü ýáĽŰ│┤Űą╝ ýé░ýݼśŕ│á ÝĹťýőťÝĽśŰŐö ŕŞ░ŰŐąýŁä ýłśÝľëÝĽťŰőĄ. Űö░ŰŁ╝ýäť ŕ░ťýäá ýáä ŕÁČýä▒ýŚÉýäťŰŐö ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░Ęŕ░Ç Ű░ťýâŁŰÉśŰę┤, Ű░ťýâŁŰÉť ýśĄý░Ęŕ░Ç ýťäýä▒ÝćÁýőáý׹Ű╣ä Ű░Ć ŰáłýŁ┤ŰŹöý׹Ű╣äýŚÉ ŕĚŞŰîÇŰíť Ű░śýśüŰÉś ýľ┤ ý┤łŕŞ░ ýťäýä▒ ý×ÉŰĆÖýÂöýáüýŁ┤ ŰÂłŕ░ÇŰչݼśŕ▓î ŰÉśŕ│á, ŰáłýŁ┤ŰŹöýŁś ÝĹťýáüýťä ý╣śýáĽŰ│┤ŕ░Ç ŰÂÇýáĽÝÖĽÝĽśŕ▓î ŰÉśŰŐö ýŤÉýŁŞýŁä ýáťŕ│ÁÝĽśŕ▓î ŰÉťŰőĄ.
GPS ýťäý╣śýáĽŰ│┤ ÝÖťýÜę
3.1. ýŞíýžÇÝĽÖýáü ýŚşŰČŞýáť ÝĽ┤ýäŁýŁä ÝćÁÝĽť ŕŞ░ýĄÇŰ░ęýťäŕ░ü ýé░ýÂť
ŰĹÉ ýžÇýáÉýŁś ŕ▓ŻýťäŰĆäŰą╝ ýĽîŰę┤, ýŞíýžÇÝĽÖýáü ýŚş ŰČŞýáť ÝĽ┤ýäŁýŁä ÝćÁÝĽ┤ýäť ŰĹÉ ýžÇýáÉŕ░äýŁś ŕ▒░ŰŽČ Ű░Ć Ű░ęýťäŕ░üýŁä ýĽî ýłś ý׳ŰőĄ. ýŞíýžÇÝĽÖýáü ýŚşŰČŞýáť ÝĽ┤ýäŁ ŕŞ░Ű▓ĽýŚÉŰŐö Karney, Vincenty Ű░Ć Pittaman ŕŞ░Ű▓Ľ Űô▒ýŁ┤ ý׳ ýžÇŰžî, ŕĚŞ ýĄĹýŚÉýäť Vincenty ŕŞ░Ű▓ĽýŁÇ ýáäýé░ŰžĄý▓┤ýŚÉ ýćÉýëŻŕ▓î ýáüýÜęÝĽá ýłś ý׳ŕ│á, ýÁťýćîÝĽťýŁś ýłťÝ֜ݼ┤ýäŁýŁä ÝćÁÝĽ┤ ŰőĘýőťŕ░ä Űé┤ýŚÉ ŕ▓░ŕ│╝Űą╝ ýé░ýÂť ÝĽá ýłś ý׳ýľ┤ ŰäÉŰŽČ ÝÖťýÜęŰÉśŕ│á ý׳ŰőĄ(Lee, 2011). Vincenty ýŚşŰČŞýáť ŰŐö ŕŞ░ýžÇýáÉ ŰĹÉ ýáÉýŁś ýťäŰĆä(¤ł1, ¤ł2) Ű░Ć ŕ▓ŻŰĆä(╬╗1, ╬╗2)ŰíťŰÂÇÝä░ ÝâÇýŤÉý▓┤ Űę┤ýâüýŁś Ű░ęýťäŕ░ü╬▒12ýŁä ŕ│äýé░ÝĽťŰőĄ(National Geographic Information Institute, 2012). ýŚČŕŞ░ýäť Ôł¬ŰŐö ÝÖöýä▒ýťäŰĆä(reduced latitude), ¤âŰŐö ŕÁČý▓┤ýŁś ŕ░üŕ▒░ŰŽČ (angular distance), fŰŐö ÝÄŞÝĆëŰĆä (flatness)Űą╝ ŰéśÝâÇŰé┤Űę░, CŰŐö ŕ│äýé░ýŁä ýťäÝĽť ýĄĹŕ░äŕ░ĺýŁ┤ŰőĄ.
ý┤łŕŞ░ ŕĚ╝ýéČŕ░ĺýť╝Űíť ╬╗ = ¤ë = ╬╗2 - ╬╗1Űą╝ ýéČýÜęÝĽśŕ│á ╬╗ýŚÉ Ű│ÇÝÖöŕ░Ç ýŚćýŁä ŰĽîŕ╣îýžÇ ŰőĄýŁîýőŁýŁä Ű░śŰ│ÁÝĽśýŚČ ŕ│äýé░ÝĽťŰőĄ.
ŰžłýžÇŰžë ŰőĘŕ│äýŚÉýäť ŰőĄýŁîýŁä ŕ│äýé░ÝĽśýŚČ ╬▒12 ýŁä ŕÁČÝĽťŰőĄ.
3.2. ŕŞ░ýĄÇŰ░ęýťäŕ░ü ŕ░äÝÄŞ ýé░ýÂťýőŁ
ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöŰŐö GPSŰíťŰÂÇÝä░ Ýśä ýťäý╣śýáĽŰ│┤Űą╝ ÝÜŹŰôŁÝĽá ýłś ý׳ŕ│á, ýáĽýžÇýťäýä▒ýŁś ýťäý╣śýáĽŰ│┤Űą╝ ýĽî ýłś ý׳ŕŞ░ ŰĽîŰČŞýŚÉ, ýŞíýžÇÝĽÖýáü ýŚş ŰČŞýáť ÝĽ┤ýäŁýŁä ÝćÁÝĽ┤ýäť ŰáłýŁ┤ŰŹöŰíťŰÂÇÝä░ ýáĽýžÇýťäýä▒ŕ░äýŁś ŕŞ░ýĄÇŰ░ęýťä ŕ░üýŁä ýé░ýݼá ýłś ý׳ŰőĄ. ýé░ýÂťŰÉť ŕŞ░ýĄÇŰ░ęýťäŕ░üýŁÇ ýťäýä▒ýÂöýáü ýőť ŕÁČŰĆÖ ŰÉť Ű░ęýťäŕ░üŕ│╝ Ű╣äŕÁÉÝĽśýŚČ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś Ű░ťý⣠ýśĄý░ĘŰą╝ ÝîÉŰőĘÝĽťŰőĄ. ŰČ╝Űíá ýžÇŕÁČÝśĽýâüŕ│╝ ŕ░Çŕ╣îýÜ┤ ÝâÇýŤÉý▓┤(WGS84) ÝĆëÝÄŞŰĆä(f)Űíť Ű░ęýťäŕ░ü ýŁä ŕ│äýé░ÝĽťŰőĄŰę┤, ŕÁČý▓┤Ű│┤ŰőĄŰŐö ýáĽÝÖĽŰĆäŕ░Ç ŰćĺýŁä ýłś ý׳ýžÇŰžî, ÝöäŰíťýäŞ ýŐĄ Ű│Áý×íŰĆä Ű░Ć ý▓śŰŽČ ŰíťŰôťýŚÉ ýśüÝľąýŁä Ű»Şý╣ťŰőĄ. Űö░ŰŁ╝ýäť, ýőťýŐĄÝůť ÝŚł ýÜęŕ░ÇŰŐą ýśĄý░ĘŰ▓öýťäýŚÉ ý׳ŰőĄŰę┤ ÝöäŰíťýäŞýäť ý▓śŰŽČŰíťŰôťŰą╝ Űé«ýÂöŕŞ░ ýťäÝĽ┤ ýäť ŕÁČý▓┤ŰíťŰĆä ÝĽ┤ýäŁýŁ┤ ŕ░ÇŰչݼśŰőĄ. ýžÇŕÁČÝśĽýâüýŁä ŕÁČý▓┤Űíť ŕ░ÇýáĽÝĽśŕ▓î ŰÉśŰę┤, ýőŁ (1)ýŁś ÝâÇýŤÉý▓┤ýŁś ÝÄŞÝĆëŰĆä(f)ŕ░ĺýŁ┤ 0ýŁ┤ ŰÉśýľ┤, ýőŁ (11)Űíť ŰőĘ ýłťÝÖö ŰÉá ýłś ý׳ŰőĄ.
ýžÇŕÁČÝśĽýâüýŁä ÝâÇýŤÉý▓┤(WGS84)ýŁŞ ŕ▓ŻýÜ░ ŰîÇŰ╣ä ýŁ┤ýâüýáüýŁŞ ŕÁČý▓┤Űíť ýáüýÜę ýőť ýáĽýžÇýťäýä▒ýŁä ýžÇÝľąÝĽśŰŐö ŕŞ░ýĄÇŰ░ęýťäŕ░üýŁś ý░ĘýŁ┤Űą╝ ÝÖĽýŁŞÝĽśŕŞ░ ýťäÝĽśýŚČ, ÝĽťŰ░śŰĆä ýžÇýŚşŰé┤ ŰÂłÝŐ╣ýἠýžÇýŚşýŁä ýäáýáĽÝĽśýŚČ Table 2ýÖÇ ŕ░Ö ýŁ┤ ý░ĘýŁ┤Űą╝ ýé░ýݼśýśÇŰőĄ(National Geographic Information Institute, 2012).
Table 2
The comparison of the geostationary satellite azimuth according to the earth shape
ýé░ýÂťŕ▓░ŕ│╝, ŰĹÉ ýžÇŕÁČÝśĽýâüŕ░ä Ű░ęýťäŕ░ü ý░ĘýŁ┤ŰŐö ýĽŻ 0.1┬░Űíť ŰáłýŁ┤ŰŹöýŚÉ ýáüýÜęýĄĹýŁŞ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś Ű░ęýťäýáĽÝÖĽŰĆäŕ░Ç 1┬░rmsýŁ┤Űé┤(Maretron, 2012)ý×äýŁä ŕ░ÉýĽł ýőť ýžÇŕÁČÝśĽýâüýŁä ŕÁČý▓┤Űíť ŕ│áŰáĄÝĽťŰőĄ ÝĽ┤ŰĆä, Ű░ťýâŁŰÉś ŰŐö Ű░ęýťäŕ░ü ý░ĘýŁ┤ŰŐö ýłśýÜę ŕ░ÇŰչݼť Ű▓öýťä Űé┤ýŚÉ ý׳ýŁîýŁä ÝÖĽýŁŞÝĽá ýłś ý׳ŰőĄ.
ý×ÉŰĆÖŰ│┤ýáĽýáłý░Ę
4.1. ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýŚ░ŰĆÖ(ŕ░ťýäá ÝŤä)
ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░ĘŰą╝ ý×ÉŰĆÖŰ│┤ýáĽÝĽśŕŞ░ ýťäÝĽ┤ýäťŰŐö Fig. 3ŕ│╝ ŕ░Ö ýŁ┤ NMEAýŚ░ŰĆÖ Ű¬ĘŰôłýŁÇ ýťäýä▒ÝćÁýőáý׹Ű╣äŰíťŰÂÇÝä░ ýáĽýžÇýťäýä▒ ýÂöýáüýŁä ýťäÝĽ┤ ÝÜîýáäŰÉť ýťäýä▒ýžÇÝľąŰ░ęýťäŕ░ü(Sat. Az), ýťäýä▒ýÂöýáüýâüÝâť Ű░Ć ýťäýä▒ ýáĽŰ│┤Űą╝ Ű░ŤýĽäýĽ╝ ÝĽťŰőĄ. ýťäýä▒ýáĽŰ│┤ýÖÇ ýÂöýáüýâüÝâť ÝÖĽýŁŞýŁä ÝćÁÝĽ┤ ýáĽýâü ýáüýť╝Űíť ýťäýä▒ýŁä ýÂöýáü ÝĽá ŕ▓ŻýÜ░, ý░ĘŰčëŕ│╝ ýáĽýžÇýťäýä▒ ŕ░ä ŰĹÉ ýťäý╣śýáĽŰ│┤ ŰíťŰÂÇÝä░ ŕŞ░ýĄÇŰ░ęýťäŕ░ü(Ref. Az)ýŁä ýé░ýݼśŕ│á, ýáäý×É ý╗┤ÝŹ╝ýŐĄŰíťŰÂÇÝä░ ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░ü(E comp. Az)ýŁä ÝÜŹŰôŁ ÝŤä ýőŁ (12)ýŚÉ Űö░ŰŁ╝ Ű│┤ ýáĽŕ░ĺ(╬▓)ýŁä ýé░ýݼťŰőĄ.
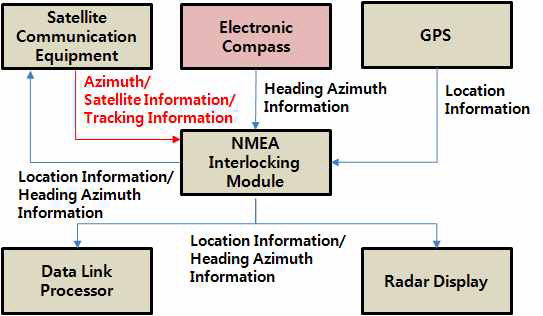
ýé░ýÂťŰÉť Ű│┤ýáĽŕ░ĺýŁÇ ŕĚŞ ý░ĘýŁ┤ŰžîÝü╝ ŕ░Çŕ░ÉÝĽśýŚČ ŰőĄýőť ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýŁś ýäáýłśŰ░ęýťäŕ░üýŁä Ű│┤ýáĽÝĽśŕ▓î ŰÉśŰę░, Ű│┤ýáĽŰÉť ýäáýłśŰ░ęýťäŕ░üýŁÇ ŕ░üŕ░ü ýŁś ý׹Ű╣äŰíť ŰÂäŰ░░ŰÉśŰŐö ŕÁČýí░ýŁ┤ŰőĄ.
4.2. ý×ÉŰĆÖŰ│┤ýáĽýáłý░Ę ýĽîŕ│áŰŽČýŽś
Fig. 4ŰŐö ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░Ę ý×ÉŰĆÖŰ│┤ýáĽýŚÉ ŰîÇÝĽť ýäŞŰÂÇýáüýŁŞ ýáł ý░ĘŰą╝ ŰĆäýőťÝĽť ŕ▓âýŁ┤ŰőĄ. ýÜ░ýäá, ý׹Ű╣ä ýáäýŤÉýŁ┤ ýŁŞŕ░ÇŰÉśŰę┤ ýáäý×É ý╗┤ÝŹ╝ýŐĄ Űíť ŰÂÇÝä░ ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░üýŁä ýłśýőá ÝĽťŰőĄ. ýłśýőáŰÉť ŕ░ĺŰôĄýŁä ÝĆëŕĚá ÝĽśýŚČ ýáäý×Éý╗┤ÝŹ╝ýŐĄýŁś ýäáýłśŰ░ęýťäŕ░ü(E Comp Az)ýŁä ýáÇý׹ݼťŰőĄ. ŕĚŞ ýÖÇ ŰĆÖýőťýŚÉ ýťäýä▒ÝćÁýőáý׹Ű╣äŰíťŰÂÇÝä░ ýťäýä▒ýĽłÝůîŰéś ýâüÝâťýáĽŰ│┤ ŰęöýőťýžÇ (Ni ŰęöýőťýžÇ)ŕ░Ç ýłśýőáŰÉśŰŐöýžÇ ÝÖĽýŁŞÝĽťŰőĄ. ýŁ┤ŰĽî ýťäýä▒ýĽłÝůîŰéśŕ░Ç Ű¬ęÝĹť ýťäýä▒ýŁä ýÂöýáüÝĽá ŕ▓ŻýÜ░, ÔÇťÝŐŞŰלÝé╣ Ű░Ć Tuner Lock ۬ĘŰôťÔÇŁŰíť ŰĆÖý×ĹŰÉś ŕŞ░ ŰĽîŰČŞýŚÉ ýłśýőáŰÉť ýâüÝâťýáĽŰ│┤ ŰęöýőťýžÇ(Ni ŰęöýőťýžÇ)Űą╝ ÝćÁÝĽ┤ ýťäýä▒ýÂö ýáüýŚČŰÂÇŰą╝ ÝÖĽýŁŞÝĽťŰőĄ. ýťäýä▒ ýÂöýáü ÝŤä ýŚ░ýćŹ ýłśýőáŰÉť 10ŕ░ťýŁś Ni Űęö ýőťýžÇýŚÉýäť ýĽłÝůîŰéś ýžÇÝľąŕ░ü ýáĽŰ│┤ýŁś ÝÄŞý░Ęŕ░Ç ┬▒0.3ŰĆä ýŁ┤Űé┤Űíť ýĽłýáĽÝÖö ŰÉśýŚłŰŐöýžÇ ÝÖĽýŁŞ ÝŤä ŰłäýáüŰÉť ýĽłÝůîŰéś ýžÇÝľąŕ░üýŁś ÝĆëŕĚáŕ░ĺýŁä ýťäýä▒ýžÇÝľą Ű░ęýťäŕ░ü(SAT Az)ŕ░ĺýť╝Űíť ýáÇý׹ݼťŰőĄ. GPS ýłśýőáŕŞ░Űíť ŰÂÇÝä░ŰŐö ý░Ę ŰčëýŁś ýťäý╣śýáĽŰ│┤ŕ░Ç ýłśýőáŰÉśŕ│á ý׳ŰŐöýžÇ ÝÖĽýŁŞÝĽśŕ│á, ýťäý╣śýáĽŰ│┤ ŰęöýőťýžÇ Űą╝ ýłśýőáÝĽśŕ│á ý׳ýť╝Űę┤, Ýśäý×Č ý░ĘŰčëŕ│╝ ýáĽýžÇýťäýä▒ ŕ░ä ŰĹÉ ýžÇýáÉýŁś ýťäý╣ś Űą╝ ŕŞ░Ű░śýť╝Űíť ýőŁ (10)ýŁä ÝćÁÝĽ┤ ýáĽýžÇýťäýä▒ýŚÉ ŰîÇÝĽť ŕŞ░ýĄÇŰ░ęýťäŕ░ü(Ref. Az)ýŁä ýé░ýݼťŰőĄ. ÝÜŹŰôŁŰÉť ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýäáýłśŰ░ęýťäŕ░ü(E Comp Az), ýťäýä▒ýžÇÝľąŰ░ęýťäŕ░ü(SAT Az) Ű░Ć ýáĽýžÇýťäýä▒ŕŞ░ýĄÇŰ░ęýťäŕ░ü(Ref. Az)ýŚÉýäť ýőŁ (12)ýŁä ÝćÁÝĽ┤ Ű│┤ýáĽŕ░ĺýŁä ýé░ýݼťŰőĄ. ýĽłýáĽÝÖöŰÉť ŰŹ░ýŁ┤Ýä░ ÝÖĽŰ│┤Űą╝ ýťäÝĽ┤ 3ŕ░ťýŁś Űłäýáüŕ▓░ŕ│╝ ŕ░ĺýŁ┤ ÝÄŞý░Ę ┬▒0.3┬░ ýŁ┤Űé┤Űíť ýĽłýáĽÝÖö ŰÉśŰŐöýžÇ ÝÖĽýŁŞ ÝŤä ÝĆëŕĚáŕ░ĺýŁä Ű│┤ýáĽŕ░ĺýť╝Űíť ýáüýÜęÝĽśýŚČ Ű░śýśüÝĽťŰőĄ.

4.3. ý×ÉŰĆÖŰ│┤ýáĽýáłý░Ę ýáüýÜę ÝŤä ŕ▓ÇýŽŁ
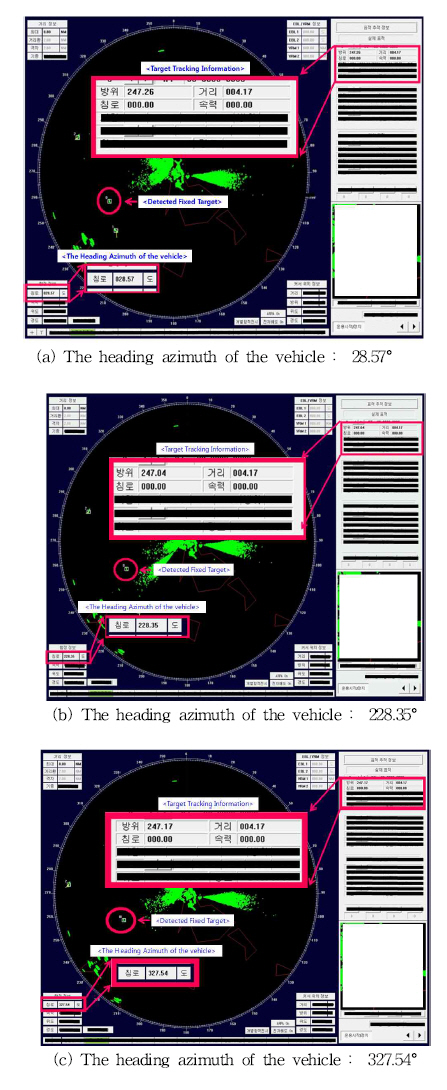
ý×ÉŰĆÖŰ│┤ýáĽýáłý░ĘŰą╝ ýáüýÜę ÝŤä ŰáłýŁ┤ŰŹöýŚÉýäť ýŞíýáĽŰÉśŰŐö ÝĹťýáü Ű░ęýťäŕ░ü ýáĽÝÖĽŰĆäŰą╝ ÝÖĽýŁŞÝĽśŕŞ░ ýťäÝĽśýŚČ, ý░ĘŰčëýŁś ýäáýłśŰ░ęÝľąýŁä ÝÜîýáäÝĽśŰę░, Ű░ęýťä ŕ░ü 247┬░ýŚÉ ýťäý╣śÝĽť ÝŐ╣ýἠŕ│áýáĽÝĹťýáüýŚÉ ŰîÇÝĽ┤ ŰáłýŁ┤ŰŹöýŚÉýäť ýŞíýáĽŰÉśŰŐö ŕ│áýáĽÝĹťýáüýŁś Ű░ęýťäŕ░üŕ│╝ Ű╣äŕÁÉÝĽśŰę░ Ű│ÇÝÖöýáĽŰĆäŰą╝ ÝÖĽýŁŞÝĽśýśÇŰőĄ.
Fig. 5ýŁÇ ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░üýŁä 28.57┬░, 228.3┬░ Ű░Ć 327.54┬░Űíť Ű│Çŕ▓ŻÝĽśýśÇýŁä ŰĽî, ýőĄýáť ŰáłýŁ┤ŰŹö ýáäýőťŕŞ░ýŚÉýäť ÝÖĽýŁŞŰÉśŰŐö ŕ│áýáĽÝĹťýáüýŁś Ű░ęýťäŕ░ü ýŞíýἠýéČýžäýŁ┤ŰőĄ. ý░ĘŰčëýŁś ýäáýłśŰ░ęýťäŕ░ü ÝÜîýáä ýőť, ŕ│áýáĽÝĹťýáü ýŁś Ű░ęýťäŕ░üýŁÇ ŕ░üŕ░ü 247.26┬░, 247.04┬░ Ű░Ć 247.17┬░Űíť ÝâÉýžÇŰÉśýŚłýť╝Űę░, ýőĄýáť Ű░ęýťäŕ░ü 247┬░ýÖÇ Ű╣äŕÁÉ ýőť ýÁťŰîÇ 0.26┬░ýŁś ÝÄŞý░Ęŕ░Ç Ű░ťýâŁÝĽĘýŁä ýĽî ýłś ý׳ýŚłŰőĄ. ýŁ┤ŰŐö ŰáłýŁ┤ŰŹöýŚÉýäť ýÜöŕÁČŰÉśŰŐö Ű░ęýťäŕ░ü ýśĄý░Ę Ű▓öýťäŰé┤ýŚÉ ý׳ýť╝Űę░, ý×ÉŰĆÖŰ│┤ýáĽýáłý░Ę ýáüýÜę ýáä ŰőĘŰĆůýť╝Űíť ýÜ┤ýÜę ýőť ýáäý×É ý╗┤ÝŹ╝ýŐĄ ýŚÉýäť Ű░ťýâŁÝĽśŰŐö ýÁťŰîÇÝÄŞý░Ę 1┬░Ű│┤ŰőĄŰĆä ŕ░ťýäáŰÉĘýŁä ÝÖĽýŁŞ ÝĽá ýłś ý׳ŰőĄ.
ŕ▓░ Űíá
ýáäý×É ý╗┤ÝŹ╝ýŐĄŰŐö ýćîÝśĽýŁ┤Űę░, ýĽłýáĽÝÖö ýőťŕ░äýŁ┤ ýžžŕ│á, ýáÇŰ╣äýÜęýŁ┤Ű×Ç ý׹ýáÉýŁ┤ ý׳ŰŐö Ű░śŰę┤, ýÖŞŰÂÇý×Éý׹ýŁś Ű│ÇÝÖöŰíť ýÜ┤ýÜę ýĄĹ ŕ│╝ŰĆäÝĽť ýśĄý░Ęŕ░Ç Ű░ťýâŁŰÉá ýłś ý׳ŰőĄ. Ű░ťýâŁŰÉť ýśĄý░ĘŰŐö ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáłýŁ┤ŰŹöýŁś ýťäýä▒ ý×ÉŰĆÖýÂöýáüýŁä ýľ┤ŰáÁŕ▓î ŰžîŰôĄŕ▒░Űéś, ŰáłýŁ┤ŰŹöýŁś ÝâÉýžÇýáĽÝÖĽŰĆäŰą╝ ŰľĘýľ┤ŰťĘ ŰŽČŰŐö ýŤÉýŁŞýŁä ýáťŕ│ÁÝĽťŰőĄ. Űö░ŰŁ╝ýäť ý×ÉŰĆÖŰ│┤ýáĽýáłý░Ę ýáüýÜę ýáä, ýśĄý░ĘŰą╝ ýĄäýŁ┤ŕŞ░ ýťäÝĽ┤ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ý׎ýŁÇ Ű│┤ýáĽýŁ┤ ÝĽäýÜöÝĽśýśÇýť╝Űę░, ŕ▓ŻýÜ░ ýŚÉ Űö░ŰŁ╝ýäťŰŐö ýú╝Ű│ÇýžÇÝśĽýŁä ÝÖťýÜęÝĽť ŕ▓ŻÝŚśý╣śýŁś Ű│┤ýáĽŕ░ĺýŁä ýłśŰĆÖýť╝Űíť ý×ůŰáąÝĽśŰŐö ŰÂłÝÄŞÝĽĘýŁ┤ ýâüýí┤ÝĽśýśÇŰőĄ.
Ű│Ş Űů╝ŰČŞýŚÉýäťŰŐö ý×ÉŰĆÖŰ│┤ýáĽýáłý░ĘŰą╝ ýáüýÜęÝĽĘýť╝ŰíťýŹĘ, ýŁ┤ýÖÇ ŕ░ÖýŁÇ ý׎ ýŁÇ Ű│┤ýáĽŕ│╝ ýłśŰĆÖ ý×ůŰáąýŁś ŰÂłÝÄŞÝĽĘýŁä ÝĽ┤ŕ▓░ÝĽśýśÇŰőĄ. ýáĽýžÇýťäýä▒ Ű░Ć ý░Ę Űčë ŕ░äýŁś ýťäý╣śýáĽŰ│┤Űíť ŰÂÇÝä░ ŕŞ░ýĄÇŰ░ęýťäŕ░üýŁä ýé░ýݼśŕ│á, ýŁ┤Űą╝ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýŞíýáĽŰ░ęýťäŕ░üýŁä ÝĆČÝĽĘÝĽť ýőĄýáť ýťäýä▒ýĽłÝůîŰéśýŁś ýžÇÝľąŰ░ęýťä ŕ░üŕ│╝ Ű╣äŕÁÉÝĽśýŚČ ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś Ű│┤ýáĽŕ░ĺýŁä ýé░ýݼśŰŐö ý×ÉŰĆÖŰ│┤ýáĽýáł ý░ĘŰą╝ ýáťýĽłÝĽĘýť╝ŰíťýŹĘ, ýáäý×É ý╗┤ÝŹ╝ýŐĄýŁś ýśĄý░ĘŰíť Ű░ťýâŁŰÉśŰŐö ŰČŞýáťýáÉýŁä ÝĽ┤ýćîÝĽśýśÇŰőĄ. ýŁ┤Űą╝ ýőĄýáť ýĽ╝ýáäýŚÉýäť ýÜ┤ýÜęýĄĹýŁŞ ýŁ┤ŰĆÖÝśĽÝĽ┤ýâüŕ░ÉýőťŰáł ýŁ┤ŰŹöýŚÉ ýáüýÜęÝĽśýŚČ ý׹Ű╣ä ýőáŰó░ŰĆä Ű░Ć ýÜ┤ýÜę ÝÄŞŰŽČýä▒ ýŽŁŰîÇŰą╝ ŕ░ÇýáŞýśČ ýłś ý׳ýŚłŰőĄ. ŰśÉÝĽť, ÝľąÝŤä ýáäý×É ý╗┤ÝŹ╝ýŐĄýÖÇ ýťäýä▒ý׹Ű╣äŰą╝ ÝĽĘŕ╗ś ýŁ┤ýÜęÝĽś ŰŐö ýťáýéČ ýőťýŐĄÝůťýŚÉ Ű│Ş ý×ÉŰĆÖŰ│┤ýáĽýáłý░ĘŰą╝ ÝÖťýÜęÝĽťŰőĄŰę┤ ýáÇŰ╣äýÜęýť╝Űíť ŕ│áýä▒ŰŐąýŁś ÝÜĘŕ│╝Űą╝ ýľ╗ýŁä ýłś ý׳ýŁä ŕ▓âýť╝Űíť ŕŞ░ŰîÇÝĽťŰőĄ.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






