

서 론
선박이나 해양구조물은 물위에 떠있기 때문에 끊임없이 크고 작은 파도에 노출될 수밖에 없고, 따라서 구조물이 계속 해서 동요를 한다. 그래서 선박에는 이 동요를 줄이기 위하여 예로부터 빌지 킬(bilge keel), 안티롤링 탱크(anti-rolling tank; ART)(Society of Naval Architects and Marine Engineers, 1989), 핀 스태빌라이저(Popular Mechanics, 1932), 자이로스코프(Popular Mechanics, 1933) 등 다양한 방법으로 이를 줄이려는 노력을 해왔다. 모든 배에 설치되어 있는 빌지 킬은 비교적 값싸게 설치하여 횡동요를 줄이는 역할을 한다.
안티롤링 탱크(anti-rolling tank: ART)의 경우는 선체에 횡 방향으로 U자형의 탱크를 설치하여 횡동요와 더불어 탱크내 의 물이 좌우로 이동하게 하는 장치로 이 때 선체의 운동과 물의 이동 사이에 위상차가 생기는 것을 이용하여 배의 횡동 요를 줄이는 장치이다. 효과는 상당히 좋으나 큰 공간을 차지 하는 단점이 있다. 물론 밸러스트 탱크나 청수 탱크를 이용하 면 공간의 문제는 해결되지만 선박의 롤링 주파수와 ART의 이동수 고유주파수를 일치시켜야 롤링 저감의 효과가 가장 크 다는 점을 고려하면 전용의 ART를 설치하는 것이 최선임을 알 수 있다. 핀 스태빌라이저의 경우는 구조가 복잡하여 설치 비도 많이 들고 유지 보수비도 많이 들고, 저속에서는 기능을 발휘할 수 없는 단점이 있다. 자이로스코프의 경우에는 질량 이 크면 클수록, 회전수가 빠르면 빠를수록 효과가 좋지만 그 에 따른 큰 동력을 소모하게 된다.
Oikawa(1993)와 Koike(1994, 1999)는 선박의 갑판 위의 원호상의 레일 위에 움직이는 질량체를 올려놓고 제어기를 통 하여 능동제어함으로써 선박의 횡동요를 감소시키는 장치를 제안한 바 있다.
이 질량이동식 안티롤링 장치는 동력을 사용하여 질량체 를 이동시키기 때문에 아주 큰 동력이 필요하게 되고 질량이 크고, 또 구조도 복잡하기 때문에 제어도 쉽지 않아서 실제로 선박에 장착하기에는 큰 비용이 든다. Moon(2005)은 질량체 를 선박의 위에서 모터를 이용하여 이동시키는 방법으로 선박 의 횡동요를 감소시키는 연구를 수행하였으나 이 방법도 대단 히 큰 동력이 요구되기 때문에 효율적이지 못하다. Yoon(2004)은 수동형 이동질량 안정기를 이용하여 횡동요를 감소시키는 방안을 제시하여 시뮬레이션을 통한 효용성을 보 인 바 있다.
여기에서는 안티롤링 진자를 구조물의 본체에 부가하여 제어기 없이 안티롤링 진자의 운동만으로 선박의 횡동요를 감 소시키는 장치에 대하여 시스템의 운동방정식을 유도하고 실 험 결과와 비교 검토한다.
이 론
선박의 안티롤링에 대한 연구와 장치는 아주 오래 전부터 연구되어 왔고, 설치되고 있다. 빌지 킬은 선체에 고정된 장치 이므로 선박의 운동을 줄이는 감쇠 장치로 고려하면 되고, 자 이로스코프는 외력으로 고려하면 되고, 안티롤링 탱크는 자유 도를 증가시켜서 해석하여야 한다. 제안하는 안티롤링 진자의 경우도 개념은 안티롤링 탱크와 완벽하게 같다. 안티롤링 탱 크의 질량체인 물은 물 자체로의 감쇠 성질을 가지고 있고, 더 하여 물이 흐르는 통로의 크기에 따라서 감쇠의 정도가 달라 지기 때문에 감쇠를 반드시 고려하여야 한다. 안티롤링 진자 의 경우는 단순한 궤도 위를 움직이도록 하면 거의 감쇠가 없 다. 감쇠를 추가하려면 궤도에 액체를 채워서 진자의 운동을 방해하거나 액체의 통로를 반대 쪽 궤도까지 폐회로를 만들어 흐름을 제어하여 감쇠의 정도를 조정할 수 있다.
횡동요만을 고려하여 선체 운동의 운동방정식을 만들면 1자유도 모델이 되고, 부가하여 안티롤링 진자를 얹으면 자유 도가 추가되어 2자유도 운동방정식이 된다. 이것은 기계장치 에서 사용하는 동흡진기의 원리와 같다. 이론적으로는 동흡진 기의 고유진동수를 기계장치의 운동 진동수와 일치시키면 기 계장치의 운동이 완전히 0이 된다(Rao, 2005). 그러나 이 경우 에는 부가된 동흡진기의 진동이 거의 무한대로 커지기 때문에 감쇠 장치를 부가하거나 진동수를 완전히 일치시지 않고 동흡 진기의 고유진동수를 기계장치의 진동수보다 약간 낮추면 동 흡진기의 진동을 줄일 수 있고, 동흡진기의 운동을 기계장치 의 운동보다 위상차가 90°도보다 약간 크게 하면 기계장치의 운동을 최대로 억제할 수 있다.
2.1. 지배방정식
안티롤링 진자를 장치한 선박은 Fig. 1과 같이 나타낼 수 있 다.
선체의 질량은 Δ라 하고, 선체의 중심은 G, 선박의 부심 은 B, 선박의 메타센터는 M이라고 한다. 안티롤링 진자의 질 량은 m, 안티롤링 진자의 중심은 g라 하기로 한다. 선박의 횡동요는 수직축에 대하여 θ1 회전하고, 안티롤링 진자는 점 P를 중심으로 선체에 대하여 θ2 회전하는 모델을 상정하기로 한다.
선체의 회전중심은 정확히 알 수 없으나 수선면의 중앙인 O에 있는 것으로 가정하기로 한다. 또 선체의 복원력은 M = Δ g G M ¯ sin θ 1 ≅ Δ g G M ¯ θ 1
이 모델을 더 단순화하면 Fig. 2와 같은 등가 시스템으로 표현할 수 있다.
Fig. 2에서 안티롤링 진자의 회전반경은 R이고, 안티롤링 진자와 선박의 회전 중심 사이의 거리는 l이고, 선박의 중심 과 안티롤링 진자의 회전 중심 사이의 거리는 s이다.
이 시스템의 운동에너지와 위치에너지는 다음과 같이 나타 낼 수 있다.
운동에너지는 선체의 운동에너지와 롤링진자의 운동에너지 의 합으로 표시할 수 있다. 선체의 질량관성모멘트를 J0 , 안티 롤링 진자의 속력을 υm이라 하면 시스템의 운동에너지는 다 음과 같다.
그런데 안티롤링 진자의 속력 υm은 Fig. 3과 같이 선체의 회전 θ1에 의하여 생기는 성분 l θ ˙ 1 R θ ˙ 2

한편 위치에너지는 횡동요에 의하여 선체의 중심이 상승하 여 생기는 성분 Δ g G M ¯ ( 1 − cos θ 1 )
따라서 총 위치에너지는 다음과 같이 된다.
이들을 Lagrange 방정식에 대입하면 시스템의 운동방정식 을 얻을 수 있다.
소각도 진동한다고 가정하면 sinθ1 ≅ θ1 , sinθ2 ≅θ2 cosθ1 ≅ 1, cosθ2 ≅ 1로 쓸 수 있어서 위 운동방정식은 다음과 같이 선형 방정식으로 정리할 수 있다.
이 식은 선형화한 비감쇠 운동방정식이다.
모형선에의 적용
Table 1
Specification of the model ship
| Item | quantity | Unit |
|---|---|---|
| Length | 0.8 | m |
| Breadth | 0.25 | m |
| Depth | 0.12 | m |
| Draft | 0.09 | m |
| Mass | 12.8 | kg |
| GM | 0.083 | m |
| Rolling period | 0.69 | sec |
Table 2
Specification of the anti-rolling pendulum
| Item | quantity | Unit |
|---|---|---|
| diameter | 0.025 | m |
| mass of ARP | 0.064 | kg |
| R | 0.118 | m |
| l | 0.03 | m |
| mass ratio(ARP/ship) | 0.5 | % |

안티롤링 탱크의 크기는 선박의 배수량의 약 4%인 500g의 이동수가 되도록 하였고, 안티롤링 진자는 배수량의 약 0.5% 인 64g인 직경 25mm의 쇠구슬을 이용하였다.
모든 시스템의 진동(동요 포함)은 시스템의 고유진동수 근 방의 주파수를 가지는 외력이 작용할 때 가장 심하게 일어나 기 때문에 이 고유진동수 근방에서 진동을 최소로 하는 제진 시스템을 개발하여야 한다. 일반적으로 시스템의 고유진동수 와 일치하는 부진동체를 장착함으로써 진동을 최소화할 수 있 다.
안티롤링 탱크의 이동하는 물의 질량을 선체질량의 약 4%로 하고, 이동수의 왕복 주기를 모형선의 횡동요 주기인 0.7초로 맞추면 Table 3과 같은 안티롤링 탱크의 제원을 얻을 수 있다.
Table 3
Specification of the ART
| Item | quantity | Unit |
|---|---|---|
| w | 14 | cm |
| wr | 3.5 | cm |
| hd | 3.5 | cm |
| hr | 13 | cm |
| Tt | 0.7 | sec |
| mass of ART water | 490 | g |
| mass ratio(ART/ship) | 3.8 | % |
Table 3에 의하여 3.5cm의 정사각형 단면을 가진 안티롤 링 탱크를 만들어서 실험에 사용하였다. 이 때 이동수의 양은 490g이었다.
또 안티롤링 진자의 경우는 단진자의 주기가 배의 동요주 기와 일치하도록 설계하였다. 단진자의 주기 T는 다음과 같 다.
3.1. 안티롤링 효과
Fig. 6은 아무런 안티롤링 장치(Anti Rolling System: ARS)가 없는 모형선의 자유감쇠 운동을 나타낸 그래프이다. 실험은 수조에서 실시하였고, 초기 횡동요 각은 10°로 하여 최 대한 조용한 상태에서 배를 놓아주었다.
Fig. 6에서 5초가 경과하면 횡동요가 커졌다 작아졌다 하는 것을 알 수 있는데 수조가 작은 관계로 반사파의 영향을 받은 결과로 보인다. 따라서 해석은 처음 5초의 범위 내에서 하였 다. 안티롤링의 효과는 한두 주기 안에서 이미 달성되어야 하 기 때문에 약 7주기에 해당하는 처음 5초는 해석 범위로 충분 하다.
먼저 안티롤링 장치를 갖추지 않은 선박의 자유진동에 대 한 횡동요의 감쇠 특성을 살펴보기 위하여 곡선맞춤법을 이용 하여 계수들을 구하여 보았다. 점성감쇠계의 자유진동의 일반 해는 다음과 같이 주어진다.
여기에서 wn은 시스템의 고유진동수이고, wd는 감쇠고유 진동수인데 선박 횡동요의 경우는 횡동요 주파수이고, ζ는 시 스템의 감쇠 특성을 나타내는 감쇠비이다. Fig. 7이 곡선맞춤 법의 결과를 보이고, Table 4가 얻어진 각 계수이다.
Table 4
Roll characteristics by curve fitting
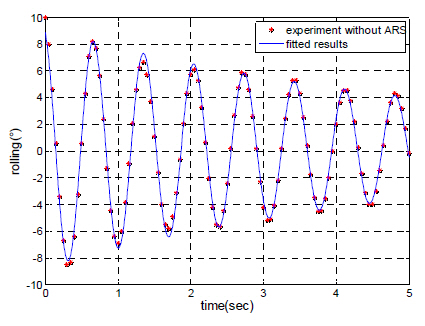
Fig. 7에서 알 수 있듯이 실험 데이터와 곡선맞춤법으로 구 한 결과가 잘 맞는 것을 알 수 있고, 따라서 이 선박의 횡동요 특성은 식 (11)로 잘 표현될 수 있음을 알 수 있다. 즉 선박의 횡동요는 점성감쇠계로 간주해도 좋다는 사실을 보여준다.
Table 4에서 횡동요 주기는 약 0.7초이며 초기 진폭은 8.91° 이고, 감쇠비는 0.019임을 알 수 있다. 초기 진폭이 10이 되지 않고 8.91이 된 것은 실제의 선박은 상하동요(heave)의 영향 을 받고, 또 정확히 메타센터를 중심으로 하여 회전운동을 하 지는 않기 때문이다. 이러한 초기 상태의 선박의 불안정성을 감안하여 식 (11)에 상수항을 더하여 곡선맞춤법을 시행하였 다.
Fig. 8은 안티롤링 장치가 없는 경우와 안티롤링 탱크(Anti Rolling Tank: ART)를 장착한 경우와 본 연구에서 제안한 안 티롤링 진자(Anti Rolling Pendulum: ARP)를 장착한 경우에 대한 횡동요의 비교 그림이다.
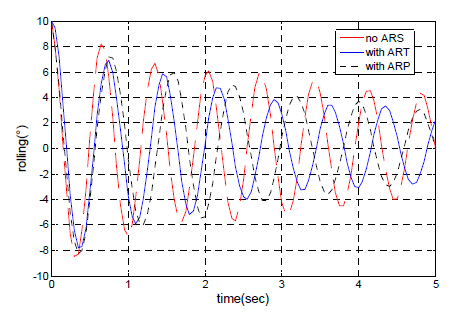
빨간색 쇄선이 안티롤링 장치가 없는 경우이고, 파란색 실 선이 전통적인 안티롤링 탱크를 장착한 경우이고, 검은색 점 선이 안티롤링 진자를 장착한 경우의 그래프이다. 안티롤링 탱크와 안티롤링 진자를 장착한 선박이 상당히 빨리 횡동요가 줄어드는 것을 알 수 있다.
Table 5
Various ship’s Roll characteristics
| Item | no ARS | ART | ARP | Unit |
|---|---|---|---|---|
| wn | 9.10 | 8.71 | 7.82 | rad/s |
| wd | 9.09 | 8.71 | 7.82 | rad/s |
| T | 0.69 | 0.72 | 0.80 | sec |
| A | 8.60 | 8.69 | 8.82 | degree(°) |
| B | -2.34 | 1.49 | -1.93 | degree(°) |
| C | 8.91 | 8.81 | 9.03 | degree(°) |
| ζ | 0.019 | 0.031 | 0.032 | - |
표에서 알 수 있듯이 감쇠비가 안티롤링 장치가 없는 경우 에는 0.019에서 안티롤링 탱크를 장착한 경우에는 0.031로, 안 티롤링 진자를 장착한 경우에는 0.032로 상당히 커졌음을 알 수 있다. 감쇠비가 커졌다는 것은 그만큼 횡동요가 빨리 준다 는 것을 의미한다. 안티롤링 탱크와 안티롤링 진자의 경우는 거의 비슷하여 우열을 가리기 어렵다.
또 횡동요 주기는 안티롤링 장치가 없는 경우에는 0.69초에 서 안티롤링 탱크를 장착한 경우에는 0.72초로, 안티롤링 진자 를 장착한 경우에는 0.80초로 길어졌음을 알 수 있다.
그래프 상에서는 안티롤링 탱크와 안티롤링 진자의 효과가 거의 비슷한 것으로 나오지만 사람이 느끼는 것은 진폭의 문 제가 아니라 가속도의 문제이기 때문에 주기가 더 길어진 안 티롤링 진자가 여객이나 승무원에게는 효과가 더 좋다. 가속 도는 진동수의 제곱에 비례하기 때문에 인체에 미치는 효과를 가속도를 기준으로 비교하면 Table 6와 같다.
Table 6
Various ship’s roll characteristics
| no ARS | ART | ARP | |
|---|---|---|---|
| roll amp | θ (rad) | θ (rad) | θ (rad) |
| max vel. | 9.09θ(rad/s) | 8.71θ(rad/s) | 7.82θ(rad/s) |
| max acc. | 82.70θ(rad/s2) | 75.84θ(rad/s2) | 61.10θ(rad/s2) |
| relativeacc | 1.00 | 0.92 | 0.74 |
안티롤링 장치가 없을 때를 1로 하여 인체나 화물에 미치는 영향을 평가하면 안티롤링 탱크의 경우는 0.92, 안티롤링 진자 의 경우는 0.74 정도의 힘을 받게 된다는 의미이다. 즉 안티롤 링 장치가 없는 경우에 비하여 안티롤링 탱크를 비치한 선박 은 약 10% 정도, 안티롤링 진자를 장치한 경우는 약 30% 정 도로 감소된 외력을 느끼게 된다는 의미이다. 물론 횡동요 주 기가 길어졌다는 것은 GM의 감소를 뜻하기 때문에 이것은 유념할 필요가 있다.
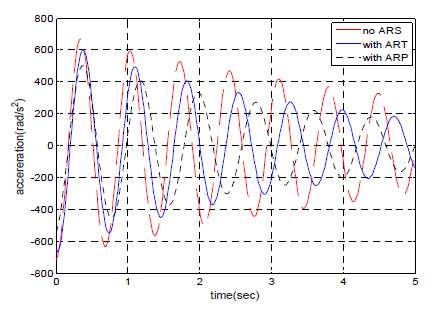
Fig. 9에 선박의 가속도의 그림을 보인다. 붉은색 쇄선이 안티롤링 장치가 없는 선박의 가속도 그래프이고, 파란색 실 선이 안티롤링 탱크가 장착된 선박의 가속도 그래프이고, 검 은색 점선이 안티롤링 진자가 장착된 선박의 가속도 그래프이 다. 안티롤링 진자가 장착된 선박의 가속도가 가장 빨리 작아 짐을 알 수 있다.
안티롤링 진자의 또 다른 장점은 안티롤링 탱크에 비하여 그 차지 용적이 약 1/3로 줄어든다는 것이다. 이는 쇠의 비중 이 해수 비중의 약 7.7배에 해당하여 통로의 면적을 줄일 수 있기 때문이다. 또 안티롤링 탱크의 해수의 양이 490g인데 비 하여 안티롤링 진자의 경우는 약 1/7.7인 64g짜리를 사용하여 동등 이상의 효과를 나타낼 수 있음을 보여준다.
3.2. 이론 해석의 적용
여기에서는 안티롤링 진자를 장치한 선박의 횡동요 특성을 이론적인 해석으로 접근한다.
3.2.1. 선형 해석
식 (8)에서 각 계수들은 실측 데이터와 이로부터 계산한 값 들을 사용하였다. 중심은 배를 실로 매달아 찾았고, 메타센터 는 계산에 의하여 구하였고, GM은 1kg의 추를 좌현에서 우현 으로 우현에서 좌현으로 이동시키는 실험에 의하여 구하였다. 이로부터 복원력을 구하고, 횡동요 주파수로부터 선체의 질량 관성모멘트 J0를 추정하였다. 따라서 이 J0에는 부가질량에 의한 질량관성모멘트가 포함되어 있다. 선체의 감쇠계수는 Table 5로부터 계산하여 구하였고, 안티롤링 진자의 감쇠계수 는 크기가 선체의 감쇠계수에 비하여 아주 작으므로 시스템의 해석에 크게 영향을 주지 않을 것으로 사료되어 선체의 감쇠 비를 그대로 이용하여 구하였다. 나머지 계수들은 물리적인 성질이나 기하학적인 성질로부터 구하였다. 이들을 행렬로 정 렬하면 다음과 같이 된다.
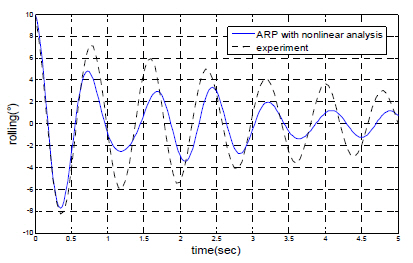
식 (12)에 초기값을 대입하면 이 운동방정식에 대한 해를 얻을 수 있다. 해석과 실험 결과를 그림으로 표시한 것이 Fig. 10이다. 빨간색 실선이 안티롤링 장치를 장착하지 않은 것이 고, 검은색 점선이 안티롤링 진자를 장착한 경우의 실험 결과 이고, 파란색 쇄선이 식 (12)를 이용하여 해석한 결과이다.
Fig. 10
Roll comparison graphs between ships, without ARS, with ARP by experiment and with ARP by linear analysis

Fig. 10을 보면 해석결과가 안티롤링 장치를 부착하지 않은 쪽과 오히려 가까운 것을 알 수 있다. 이것은 식 (10)을 잘 살 펴보면 알 수 있다. 안티롤링 진자의 고유진동수를 선박의 횡 동요 주파수와 같도록 설계하였기 때문에 K11/J11과 K22/J22의 비는 거의 같지만 J11/J22와 K11/K22의 비는 약 140으로 비교 하기 힘들 정도로 차이가 크다. 따라서 1/140 크기의 안티롤링 진자를 부가하여서는 선박의 횡동요 주파수를 거의 바꾸지 못 한다.
이는 식 (7)의 선형방정식으로 근사하는 과정에서 많은 가 정이 들어갔기 때문이다. 결국 비선형 방정식을 풀어야 더욱 정확한 결과를 기대할 수 있는 것이다.
결 론
본 연구에서는 안티롤링 진자를 이용하여 선박의 횡동요를 저감시키는 방법을 제안하여서 다음의 결론을 얻었다.
1. 약 0.5%의 부가 중량인 안티롤링 진자를 이용하여 이보 다 약 8배 무거운 안티롤링 탱크를 이용한 경우보다 동등 이 상의 안티롤링 성능을 낼 수 있음을 확인하였다. 안티롤링 탱 크를 밸러스트 탱크 등 다른 탱크를 이용할 경우에는 추가의 부피를 차지하지는 않지만 이동수의 고유진동수를 횡동요 고 유진동수와 일치시키기에는 한계가 있다.
2. 인체나 화물에 직접적으로 영향을 주는 가속도의 관점에 서 보면 안티롤링 진자를 이용할 경우가 안티롤링 탱크를 이 용할 경우보다 월등히 좋은 효과를 볼 수 있음을 보였다.
3. 안티롤링 진자를 장치한 선박의 횡동요에 대하여 수학 모델을 제시하여서 선형화한 모델과 비선형 모델에 대한 해석 적 방법을 제시하였다.
4. 선형화한 모델 해석으로는 횡동요 주기를 맞추는데 한계 가 있었으나, 비선형미분방정식을 적용한 결과 개선된 결과를 얻을 있었다.
제안한 장치는 큰 선박에 적용하기에는 0.5%의 중량도 큰 중량이 되기 때문에 많은 추가적인 연구가 필요할 것으로 보 인다. 그러나 낚싯배 등 소형선박이나 소형 여객선에는 적용 할 수 있을 것으로 사료된다.
또 안티롤링 진자를 코퍼댐이나 기관실 앞쪽 벽 근처에 설 치하면 추가적인 공간을 줄일 수 있을 것이다.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






