


1. žĄú Ž°†
žĶúÍ∑ľ žěźžú®žöīŪē≠žĄ†Žįē ÍįúŽįúžĚĄ žúĄŪēú žóįÍĶ¨ÍįÄ ÍĶ≠ŽāīžôłžóźžĄú ž∂ĒžßĄ ž§Ďžóź žěąŽč§. žěźžú®žöīŪē≠žĄ†Žįē ÍįúŽįúžóźžĄú ŪēĶžč¨Íłįžą† ž§Ď ŪēėŽāėŽäĒ Ūē≠Ž°úž∂ĒžĘ̳֞Žćį, žĚīŽü¨Ūēú Ūē≠Ž°úž∂ĒžĘÖžĚÄ žĄ†ŽįēžĚė žēąž†ĄžĄĪ ŪôēŽ≥īžóź ž§ĎžöĒŪēėÍłį ŽēĆŽ¨łžóź žěźžú®žöīŪē≠žĄ†Žįē žĄ§Í≥Ą žčú žā¨ž†ĄŪŹČÍįÄ Ūēīžēľ ŪēúŽč§.
Ž≥ł žóįÍĶ¨žĚė Ž™©ž†ĀžĚÄ žěźžú®žöīŪē≠žĄ†ŽįēžĚė Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚĄ žčúÍįĀž†Ā ŽįŹ ž†ēŽüČž†ĀžúľŽ°ú ŪŹČÍįÄŪē† žąė žěąŽäĒ ÍłįŽ≤ēžĚĄ ÍįúŽįúŪēėÍłį žúĄŪēú Í≤ÉžĚīŽč§. žčúÍįĀž†Ā ŪŹČÍįÄŽäĒ Ūē≠Ž°úž∂ĒžĘÖ ž§ĎžĚł žĄ†Žįēžóź žĚėŪēī žÉĚžĄĪŽźėŽäĒ ŪĆĆÍ≥ĄŽ•ľ ž†Ąžāįžú†ž≤īžó≠Ūēô(Computational Fluid Dynamics, žĚīŪēė CFD) žÜĆŪĒĄŪäłžõ®žĖīŽ•ľ žĚīžö©Ūēėžó¨ žľąŽĻąŪĆĆ(Kelvin wave)Ž•ľ ÍĶ¨ŪėĄŪēėÍ≥† ÍįÄžčúŪôĒŪēėžó¨ žąėŪĖČŪēėžėÄŽč§. Í∑łŽ¶¨Í≥† ž†ēŽüČž†Ā ŪŹČÍįÄŽäĒ ŽĎź ÍįÄžßÄžĚė Ž≥ÄžąėŽ•ľ žĚīžö©Ūēėžó¨ ŪŹČÍįÄŪēėžėÄŽäĒŽćį, ŪēėŽāėŽäĒ Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀÍ≥ľ ž∂Ēž†ē žĄ†žąėŽį©žúĄÍįĀ žā¨žĚīžĚė žį®žĚī ÍįížĚīÍ≥†, Žč§Ž•ł ŪēėŽāėŽäĒ Í≥ĄŪöćŪē≠Ž°úžôÄ ž∂ĒžĘÖŪē≠Ž°ú žā¨žĚīžĚė ÍĪįŽ¶¨ žį®žĚī ÍįížĚĄ žĚīžö©Ūēėžó¨ žąėŪĖČŪēėžėÄŽč§. žĚīŽü¨Ūēú ŽĎź ÍįÄžßÄ Ž≥ÄžąėŽäĒ Ūē≠Ž°úž∂ĒžĘÖžóź ž£ľŽ°ú žĚīžö©ŽźėŽäĒ ÍįÄžčúžĄ† ÍįÄžĚīŽćėžä§ žēĆÍ≥†Ž¶¨ž¶ė(Line-of-Sight Guidance Algorithm, žĚīŪēė LOS žēĆÍ≥†Ž¶¨ž¶ė)žĚĄ žĚīžö©Ūēėžó¨ Í≥ĄžāįŪēėžėÄŽč§(Fossen, 2011).
Íłįž°ī Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä• ŪŹČÍįÄžóź ÍīÄŪēú žóįÍĶ¨Ž•ľ žāīŪéīŽ≥īŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
ž†ēŽüČž†Ā ŪŹČÍįÄžĚė Í≤ĹžöįžóźŽäĒ LOS žēĆÍ≥†Ž¶¨ž¶ėÍ≥ľ žĄ†Žįē žąėŪēô Ž™®ŽćłžĚĄ Í≤įŪē©Ūēú Žį©Ž≤ēžĚī ž£ľŽ°ú ž†úžēąŽźėžóąŽäĒŽćį(Fossen et al, 2003; Borhaug and Pettersen, 2005; Lekkas and Fossen, 2012; Sandeepkumar et al, 2022), Íłįž°ī žóįÍĶ¨žóź žā¨žö©Žźú žĄ†Žįē žąėŪēô Ž™®ŽćłžĚÄ Žč®žąúŪěą žú†ž≤īŽ†•žĚĄ ž∂Ēž†ēŪēėžó¨ žĄ†ŽįēžĚė ÍĪįŽŹôžĚĄ Í≥ĄžāįŪēėÍłį ŽēĆŽ¨łžóź ŽāúŽ•ė žú†ŽŹôÍ≥ľ žľąŽĻąŪĆĆ ŽďĪ žĄ†Žįē ž£ľžúĄžóź ŽįúžÉĚŪēėŽäĒ žú†ž≤īžó≠Ūēôž†Ā ŪėĄžÉĀžĚÄ ÍįÄžčúŪôĒŪēėžßÄ Ž™ĽŪēėŽäĒ ŪēúÍ≥ĄÍįÄ žěąžóąŽč§. ŪēúŪéł, CFD žÜĆŪĒĄŪäłžõ®žĖīŽäĒ žöīŪē≠ ž§ĎžĚł žĄ†Žįē ž£ľžúĄžĚė žú†ŽŹôžĚĄ žčúÍįĀŪôĒŪē®žúľŽ°úžć® žú†ž≤īžó≠Ūēôž†Ā ŪėĄžÉĀžóź ŽĆÄŪēī Ž™ÖŪôēŪēú ŪēīžĄĚžĚĄ ž†úÍ≥ĶŪē† žąė žěąŽäĒ žě•ž†źžĚī žěąŽäĒ Í≤ÉžúľŽ°ú žēĆŽ†§ž†ł žěąŽč§.
žĚīžóź, Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ Ž™®ŽćłÍ≥ľ LOS žēĆÍ≥†Ž¶¨ž¶ėžĚĄ Í≤įŪē©Ūēú Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä• ŪŹČÍįÄŽį©Ž≤ēžĚĄ ÍįúŽįúŪēėžėÄŽč§. Ž≥ł žóįÍĶ¨žóźžĄú ž†úžēąŪēú žěźžú®žöīŪē≠žĄ†ŽįēžĚė Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä• ŪŹČÍįÄÍłįŽ≤ēžĚÄ ž†ēŽüČž†Ā ŪŹČÍįÄŽŅźŽßĆ žēĄŽčąŽĚľ Ūē≠Ž°úž∂ĒžĘÖ ž§Ď ŽįúžÉĚŪēėŽäĒ žú†ž≤īžó≠Ūēôž†Ā ŪėĄžÉĀžĚė ÍįÄžčúŪôĒŽ•ľ ŪÜĶŪēī Ūē≠Ž°úž∂ĒžĘÖ Í≤įÍ≥ľžĚė Ž™ÖŪôēŪēú ŪēīžĄĚžĚī ÍįÄŽä•Ūē† Í≤ÉžúľŽ°ú ÍłįŽĆÄŽźúŽč§.
2. Ūē≠Ž°úž∂ĒžĘÖ ŪŹČÍįÄ Ž™®Žćł
2.1 Ūē≠Ž°úž∂ĒžĘÖ ŪŹČÍįÄ Ž™®Žćł
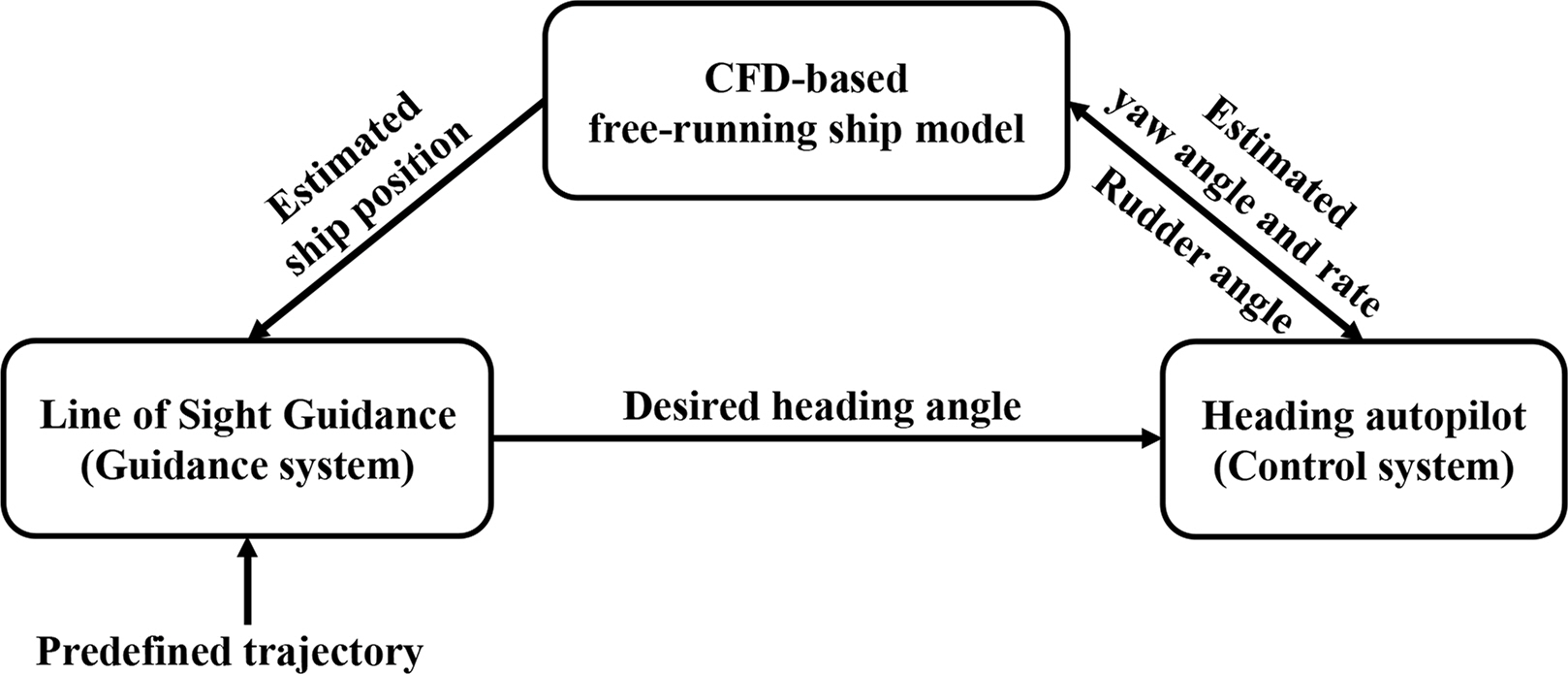
Fig. 1žĚÄ Ž≥ł žóįÍĶ¨žóźžĄú ž†úžēąŪēú CFD ÍłįŽįėžĚė Ūē≠Ž°úž∂ĒžĘÖ ŪŹČÍįÄ Ž™®ŽćłžĚĄ ŽāėŪÉÄŽāłŽč§. žĚī ŪŹČÍįÄ Ž™®ŽćłžĚÄ LOS ÍįÄžĚīŽćėžä§, žĄ†žąėŽį©žúĄž†úžĖī žė§Ū܆ŪĆƞ̾ŽüŅ(Heading autopilot), Í∑łŽ¶¨Í≥† CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®Žćł(CFD-based free running ship model)Ž°ú ÍĶ¨žĄĪŪēú Í≤ÉžĚīŽč§.
LOS ÍįÄžĚīŽćėžä§žóźžĄúŽäĒ žā¨ž†Ąžóź ž†ēŪēú Í≥ĄŪöćŪē≠Ž°úžóź žĄ†ŽįēžĚī žĶúŽĆÄŪēú ÍįÄÍĻĚÍ≤Ć žöīŪē≠Ūē† žąė žěąŽäĒ žĄ†ŽįēžúĄžĻėžóźžĄúžĚė Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžĚĄ ž∂úŽ†•ŪēėŽäĒŽćį, žĄ†ŽįēžúĄžĻėŽäĒ CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžóźžĄú ž∂úŽ†•ŪēúŽč§.
žĚīžĖīžĄú, žĄ†žąėŽį©žúĄž†úžĖī žė§Ū܆ŪĆƞ̾ŽüŅžóźžĄúŽäĒ Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀÍ≥ľ žĄ†ŽįēŽ™®ŽćłžóźžĄú ž∂Ēž†ēŪēú žĄ†žąėŽį©žúĄ ÍįĀ Í∑łŽ¶¨Í≥† žĄ†ŪöĆÍįĀžÜ掏ĄŽ•ľ žĚīžö©Ūēėžó¨ žĄ†ŽįēžĚė ŪÉÄÍįĀžĚĄ ž∂úŽ†•ŪēúŽč§.
Í∑łŽüį ŪõĄ, CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžóźžĄúŽäĒ ŪÉÄÍįĀžóź ŽĒįŽ•ł žĄ†ŽįēžĚė 6žěźžú†ŽŹĄ žöīŽŹôžĚĄ Í≥ĄžāįŪēėÍ≥† Ūē≠Ž°úž∂ĒžĘÖžóź ŪēĄžöĒŪēú žöīŽŹôŽ≥ÄžąėŽ•ľ ž∂úŽ†•ŪēúŽč§. CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžĚÄ ŪēúÍĶ≠žĚė žĄ†ŽįēŪēīžĖĎŪĒĆŽěúŪäł žóįÍĶ¨žÜƞ󟞥ú Í≥ĶÍįúŪēú KCS(KRISO Container Ship) žĄ†ŪėēžĚĄ žā¨žö©ŪēėžėÄŽč§. Table 1žĚÄ KCSžĚė ž£ľžöĒ ž†úžõźžĚĄ ŽāėŪÉÄŽāłŽč§.
2.2 žąėžĻėŪēīžĄĚ ÍłįŽ≤ē
Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ žú†Ūēúž≤īž†ĀŽ≤ēžĚĄ žąėžĻėŪēīžĄĚ ÍłįŽ≤ēžúľŽ°ú žĚīžö©ŪēėžėÄŽč§. žēĄžöłŽü¨, Ūē≠Ž°úž∂ĒžĘÖ ž§Ď žĄ†Žįē ž£ľŽ≥ÄžĚė žú†ž≤īŽ•ľ ŽĻĄžēēž∂ēžĄĪ ŽČīŪĄī žú†ž≤īŽ°ú ÍįÄž†ēŪēú ŽĻĄž†ēžÉĀ RANS Ž≤ēžĚĄ žĚīžö©Ūēėžó¨ žąėžĻėž†ĀžúľŽ°ú Í≥ĄžāįŪēėžėÄŽč§. žú†ž≤īžĚė žóįžÜć Žį©ž†ēžčĚžĚÄ Žč§žĚĆ žčĚ(1)Ž°ú ŽāėŪÉÄŽāľ žąė žěąÍ≥†, žöīŽŹôŽüČ Žį©ž†ēžčĚžĚÄ Žč§žĚĆ žčĚ(2)Ž°ú ŽāėŪÉÄŽāľ žąė žěąŽč§.
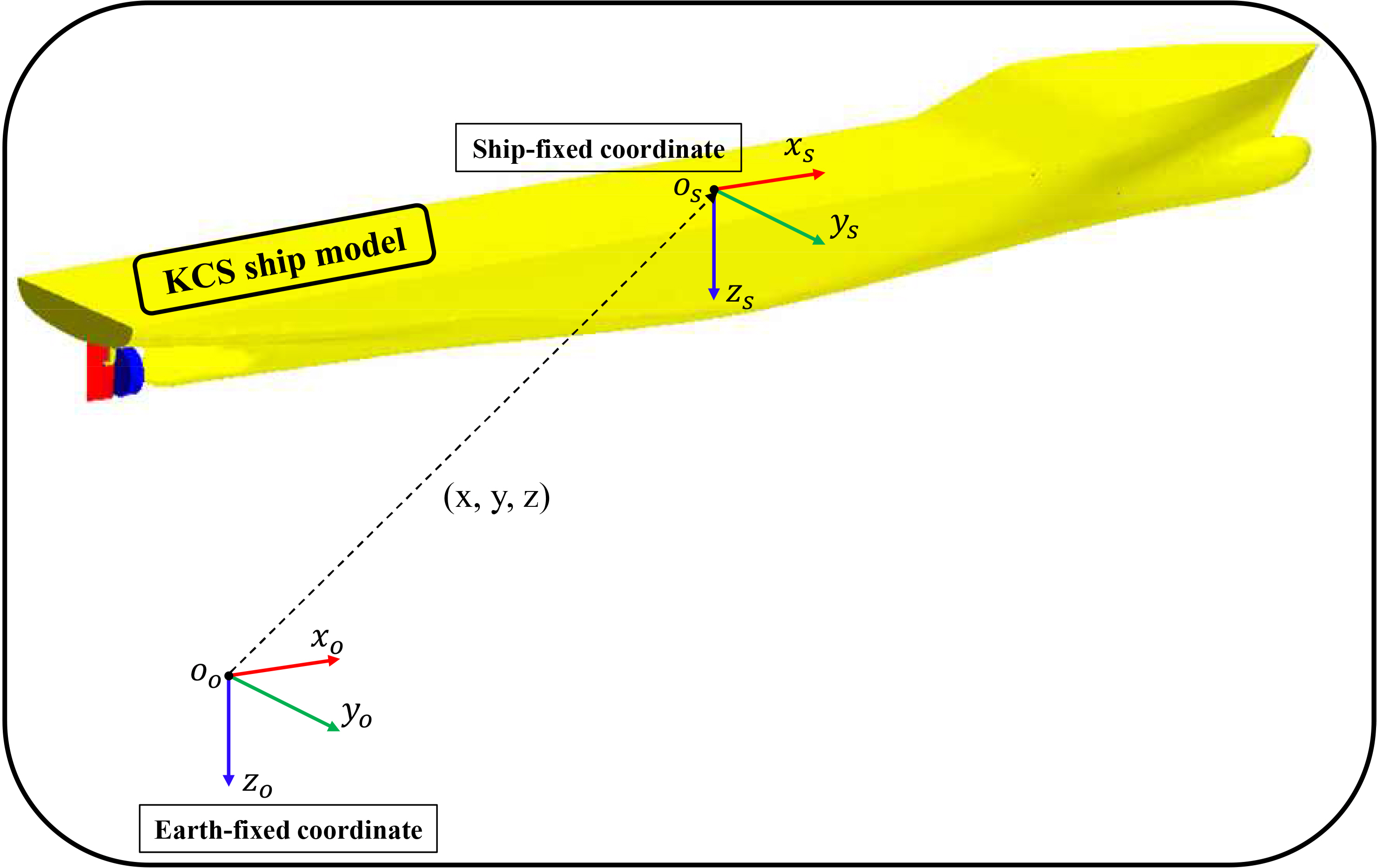
žó¨ÍłįžĄú, ‚ąá‚ÄĘ(‚ÄĘ)žĚÄ Žįúžāį žóįžāįžěź, ‚ąá(‚ÄĘ)žĚÄ ÍĶ¨Žįį žóįžāįžěź, UžĚÄ žú†ž≤ī žÜ掏Ą, UgžĚÄ Í≤©žěź žÜ掏Ą, pžĚÄ žēēŽ†•, ŌĀžĚÄ žú†ž≤ī ŽįÄŽŹĄ, őľeffžĚÄ žú†Ūö® žó≠Ūēô ž†źŽŹĄ(=ŌĀ(őĹ+őĹt), őĹžĚÄ ŽŹôž†źŽŹĄ, őĹtžĚÄ žôÄž†źžĄĪ(ŽāúŽ•ėŽ™®ŽćłžóźžĄú Í≤įž†ē), qižĚÄ žā¨žö©žěź ž†ēžĚė žÜĆžä§ŪÖÄ(source term)žĚĄ ŽāėŪÉÄŽāłŽč§. Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ MenteržĚė Shear Stress Transport (SST) ŽāúŽ•ė Ž™®Žćł(Menter et al, 2003)žĚĄ žĚīžö©Ūēėžó¨ žöīŪē≠ ž§Ď ŽįúžÉĚŪēėŽäĒ ŽāúŽ•ėŽ•ľ Ūö®Í≥ľž†ĀžúľŽ°ú ŪŹ¨žį©ŪēėžėÄŽč§. SST ŽāúŽ•ė Ž™®ŽćłžĚÄ CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžóźžĄú ÍįÄžě• ŽĄźŽ¶¨ žā¨žö©ŽźėÍ≥† Í≤Äž¶ĚŽźú Í≤ÉžúľŽ°ú Ž≥īÍ≥†ŽźėžĖī žěąŽč§(Kim et al., 2021a). ŽėźŪēú, SIMPLE (Semi-Implicit Method for Pressure-Linked Equations) žēĆÍ≥†Ž¶¨ž¶ėžĚĄ žā¨žö©Ūēėžó¨ ŽāúŽ•ėžĚė žēēŽ†•Í≥ľ žÜ掏Ą žā¨žĚīŽ•ľ žóįÍ≥ĄŪēėžó¨ Í≥ĄžāįŪēėžėÄŽč§. Fig. 2žĚÄ Ž≥ł žóįÍĶ¨žóźžĄú žĄ§ž†ēŪēú žßÄÍĶ¨ žĘĆŪĎúÍ≥Ą(ÍīÄžĄĪ žĘĆŪĎúÍ≥Ą) ŽįŹ žĄ†Žįē žĚīŽŹô žĘĆŪĎúÍ≥Ą(ŽĻĄÍīÄžĄĪ žĘĆŪĎúÍ≥Ą)Ž•ľ ŽāėŪÉÄŽāłŽč§. žĄ†Žįē žĚīŽŹô žĘĆŪĎúÍ≥ĄžĚė ž§Ďžč¨žĚÄ žĄ†ŽįēžĚė Ž¨īÍ≤Ćž§Ďžč¨žóź žúĄžĻėŪēúŽč§. CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžĚė Í≥ĶÍįĄÍ≤©žěźŽäĒ CFD žÜĆŪĒĄŪäłžõ®žĖīžĚė Trimmed Cell Mesher ÍłįŽ≤ēžĚĄ ž†Āžö©Ūēėžó¨ žÉĚžĄĪŪēėžėÄŽč§. žĄ†ž≤īžôÄ ŪÉÄ ŪĎúŽ©īžĚė Í≤©žěźŽäĒ Surfacce Remehser ÍłįŽ≤ēžĚĄ žĚīžö©Ūēėžó¨ žÉĚžĄĪŪēėžėÄŽč§. ŪĎúŽ©ī Í≤©žěźŽ•ľ žÉĚžĄĪŪē† ŽēĆ ž†ēŽįÄŪēú Í≥ĄžāįžĚĄ žúĄŪēī žĄ†ŽįēžĚė ŪĚėžąė Ž∂ÄÍ∑ľ ŽįŹ ŪēėŽ∂Ä ŪĎúŽ©īžĚÄ Í≤©žěźŽ•ľ ž°įŽįÄŪēėÍ≤Ć žÉĚžĄĪŪēėžėÄÍ≥†, Í∑ł žôłžóźŽäĒ žĄĪÍłī Í≤©žěźŽ°ú žÉĚžĄĪŪēėžėÄŽč§. Í∑łŽ¶¨Í≥† žĄ†ž≤ī ŪĎúŽ©īžóź žĚėŪēī ŽįúžÉĚŪēú žěźžú† žąėŽ©īžĚĄ ž†ēŽįÄŪēėÍ≤Ć ŪĎúŪėĄŪēėÍłį žúĄŪēī žĄ†ž≤ī Ž∂ÄÍ∑ľžóźŽäĒ ž°įŽįÄŪēú Í≥ĶÍįĄÍ≤©žěźŽ•ľ Ž∂ĄŪŹ¨žčúžľįÍ≥†, žĄ†ž≤īžóźžĄú Ž©ÄžĖīžßąžąėŽ°Ě žĄĪÍłī Í≤©žěźŽ•ľ Ž∂ĄŪŹ¨žčúžľįŽč§. ŽėźŪēú, žĄ†ž≤ī ŪĎúŽ©ī Ž∂ÄÍ∑ľžĚė ŽāúŽ•ė Í≤ĹÍ≥ĄžłĶžĚĄ ž†ēŪôēŪěą ŪēīžĄĚŪēėÍłį žúĄŪēī ŪĒĄŽ¶¨ž¶ė Ž†ąžĚīžĖī(Prism layer)ÍłįŽ≤ēžĚĄ žā¨žö©ŪēėžėÄžúľŽ©į, Ž†ąžĚīžĖīžĚė žīĚ ÍįúžąėŽäĒ 6ÍįúŽ°ú žĄ§ž†ēŪēėžėÄŽč§. žĄ†ž≤īžĚė 6žěźžú†ŽŹĄ žõÄžßĀžěĄÍ≥ľ žė§Ū܆ŪĆƞ̾ŽüŅžóź žĚėŪēú ŪÉÄžĚė ŪöĆž†ĄžĚĄ ÍĶ¨ŪėĄŪēėÍłį žúĄŪēī ž§Ďž≤©Í≤©žěźÍ≥ĄŽ≤ēžĚĄ CFD Ž™®Žćłžóź ž†Āžö©ŪēėžėÄŽč§. žēĄžöłŽü¨ Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ ž†ēžąė ž§Ď Ūē≠Ž°úž∂ĒžĘÖž†úžĖīŽ•ľ žąėŪĖČŪēėŽäĒ žĄ†ŽįēŽ™®ŽćłžĚĄ ÍĶ¨ŪėĄŪēėÍłį žúĄŪēī Volume of Fluid(VOF) Žį©Ž≤ēžĚĄ Í≥†Ž†§ŪēėžėÄŽč§. CFD žěźžú†Ūē≠ž£ľ žĄ†ŽįēŽ™®ŽćłžĚė Í∑úžĻôŪĆĆžôÄ Ž∂ąÍ∑úžĻôŪĆĆ, ž°įŽ•ė, Í∑łŽ¶¨Í≥† ž≤úžąėž°įÍĪī ŽďĪ Žč§žĖĎŪēú žôłŽ∂ÄŪôėÍ≤Ş̥ ÍĶ¨ŪėĄŪēėÍłį žúĄŪēú Í≤©žěźžÉĚžĄĪ ŽįŹ Í≤ĹÍ≥Ąž°įÍĪīžĚÄ Íłįž°īžóź Ž≥īÍ≥†Žźú žóįÍĶ¨Í≤įÍ≥ľŽ•ľ žĚīžö©Ūē† žąė žěąŽč§(Kim, D., and Tezdogan, T, 2022; Kim et al, 2021b; Kim et al, 2021c).
2.3 Ūē≠Ž°úž∂ĒžĘÖž†úžĖī žēĆÍ≥†Ž¶¨ž¶ė
Ūē≠Ž°úž∂ĒžĘÖž†úžĖī žēĆÍ≥†Ž¶¨ž¶ėžĚÄ LOS žēĆÍ≥†Ž¶¨ž¶ėžĚĄ CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ žĄ†ŽįēŽ™®Žćłžóź Í≤įŪē©žčúžľúžĄú ÍĶ¨ŪėĄŪēėžėÄŽč§. Fig. 3žĚÄ Ūē≠Ž°úž∂ĒžĘÖž†úžĖīŽ•ľ žúĄŪēú LOS ÍįÄžĚīŽćėžä§ Ž≤ēžĻôžĚĄ ŽāėŪÉÄŽāłŽč§.
LOS žēĆÍ≥†Ž¶¨ž¶ėžóźžĄú ž∂úŽ†•ŽźėŽäĒ Ž™©ŪĎú žĄ†žąėŽį©žúĄ ÍįĀ(ŌÜd)žĚÄ Žč§žĚĆ žčĚ(3)žúľŽ°ú Í≥ĄžāįŪē† žąė žěąŽč§.
žó¨ÍłįžĄú, ŌípžĚÄ Žč§žĚĆ žčĚ(4)žĚĄ žĚīžö©Ūēėžó¨ Í≥ĄžāįŪēú žąėŪŹČÍ≤ĹŽ°ú ž†ĎžĄ†ÍįĀŽŹĄŽ•ľ ŽāėŪÉÄŽāīÍ≥†, yežĚÄ Žč§žĚĆ žčĚ(5)žĚĄ žĚīžö©Ūēėžó¨ Í≥ĄžāįŪēú Ūē≠Ž°úžĚīŪÉą Ūéłžį®Ž•ľ ŽāėŪÉÄŽāīŽ©į, ‚ąÜhžĚÄ ž°įŪÉÄŽ•ľ žúĄŪēú žĄ†ŪöĆ Žß§ÍįúŽ≥ÄžąėŽ•ľ ŽāėŪÉÄŽāīÍ≥†, ő≤žĚÄ Žč§žĚĆ žčĚ(6)žĚĄ žĚīžö©Ūēėžó¨ Í≥ĄžāįŪēú Ū鳎•ėÍįĀžĚĄ ŽāėŪÉÄŽāłŽč§.
žó¨ÍłįžĄú, (xk,yk)žĚÄ kŽ≤ąžßł Ž≥ÄžĻ®žßÄž†źžĚĄ ŽāėŪÉÄŽāīÍ≥† (x,y)žĚÄ žĄ†ŽįēžĚė Ž¨īÍ≤Ćž§Ďžč¨ žúĄžĻėŽ•ľ ŽāėŪÉÄŽāłŽč§.
žó¨ÍłįžĄú, vžôÄ uŽäĒ žĄ†ŽįēžĚė xsž∂ē Žį©ŪĖ•žĚė žÜ掏ĄžôÄ ysž∂ē Žį©ŪĖ•žĚė žÜ掏ĄŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§.
ŪēúŪéł, LOS žēĆÍ≥†Ž¶¨ž¶ėžĚė Ž™©ŪĎúŽäĒ Ūē≠Ž°úž∂ĒžĘÖž†úžĖī ž§Ď Ūē≠Ž°úžĚīŪÉąŪéłžį®(ye)ÍįÄ žĶúžÜĆÍįÄ ŽźėŽŹĄŽ°Ě žĄ†ŽįēžĚĄ ž†úžĖīŪēėŽäĒ Í≤ÉžúľŽ°ú, Žč§žĚĆžčĚ(7)Í≥ľ ÍįôžĚī ŪĎúŪėĄŪē† žąė žěąŽč§.
žēĄžöłŽü¨, Ūē≠Ž°úž∂ĒžĘÖ ž§Ď ŪÉÄžĚė žõÄžßĀžěĄžĚĄ ž†úžĖīŪēėÍłį žúĄŪēú žė§Ū܆ŪĆƞ̾ŽüŅžĚÄ ŽĻĄŽ°ÄŽĮłŽ∂Ą(Proportional and Differential, PD) ž†úžĖīÍłįŽ•ľ ž†Āžö©ŪēėŽäĒ Í≤ÉžúľŽ°ú ÍįÄž†ēŪēúŽč§.
3. žąėžĻė žčúŽģ¨Ž†ąžĚīžÖė ŽįŹ Í≤įÍ≥ľ
3.1 žąėžĻė žčúŽģ¨Ž†ąžĚīžÖė Žį©Ž≤ē
žčúŽģ¨Ž†ąžĚīžÖėžĚÄ Íłįž°ī žóįÍĶ¨Ž•ľ ŪÜĶŪēī žč†ŽĘįžĄĪžĚī Í≤Äž¶ĚŽźú RANS(Reynolds Averaged Navier-Stokes) ÍłįŽįėžĚė žÉĀžö© ŪĒĄŽ°úÍ∑łŽě®žĚł STAR-CCM+Ž•ľ žĚīžö©Ūēėžó¨ žąėŪĖČŪēėžėÄŽč§(Kim et al., 2021a).
žēĄžöłŽü¨, Ž≥ł žóįÍĶ¨žóźžĄú žā¨žö©Ūēú žĄ†ŽįēŽ™®ŽćłžĚė ž†ēžąė ž§Ď 6žěźžú†ŽŹĄ ž°įžĘÖžöīŽŹôžĄĪŽä•žĚė žč†ŽĘįžĄĪžĚÄ Ūē≠Ž°úž∂ĒžĘÖ žčúŽģ¨Ž†ąžĚīžÖėžĚĄ žąėŪĖČŪēėÍłį žĚīž†Ąžóź Í≤ÄŪ܆ŪēėžėÄŽč§. žĚīÍ≤ÉžĚÄ Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä• ŪŹČÍįÄžĚė ž†ēŪôēŪēú žėąžł°žĚĄ žúĄŪēú Í≤ÉžúľŽ°ú, Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚÄ žā¨žö©Ūē† žĄ†ŽįēŽ™®ŽćłžĚė ž°įžĘÖžöīŽŹôžĄĪŽä•Í≥ľ ŽįÄž†ĎŪēú ÍīÄÍ≥ĄÍįÄ žěąÍłį ŽēĆŽ¨łžĚīŽč§. Í≤ÄŪ܆ Í≤įÍ≥ľ, Ž≥ł žóįÍĶ¨žóź žā¨žö©Ūēú CFD ÍłįŽįėžĚė žĄ†ŽįēŽ™®ŽćłžĚÄ ŽÜížĚÄ žč†ŽĘįŽŹĄŽ•ľ ÍįĖÍ≥† ž†ēžąė ž§Ď 6žěźžú†ŽŹĄ Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚĄ ŪŹČÍįÄŪē† žąė žěąŽäĒ Í≤ÉžúľŽ°ú ŪôēžĚłŪēėžėÄŽč§(Kim et al., 2021a).
3.2 Í≥ĄŪöć Ūē≠Ž°ú žĄ§ž†ē
Table 2ŽäĒ žčúŽģ¨Ž†ąžĚīžÖėžóź žĚīžö©Ūēú Í≥ĄŪöćŪē≠Ž°úŽ•ľ ŽāėŪÉÄŽāłŽč§. Í≥ĄŪöćŪē≠Ž°úŽäĒ žīĚ 5žĘÖžĚė Ž≥ÄžĻ®žßÄž†źžĚė žúĄžĻė(x, y)žôÄ ÍįĀ Ž≥ÄžĻ®žßÄž†ź žā¨žĚīžĚė žßĄŽį©žúĄžôÄ ÍĪįŽ¶¨Ž•ľ žĚīžö©Ūēėžó¨ ÍĶ¨žĄĪŪēėÍ≥†, žßĀžßĄ, žĘĆŪėĄ Ž≥ÄžĻ® ŽėźŽäĒ žöįŪėĄ Ž≥ÄžĻ® ŽďĪ ÍįĄŽč®Ūěą Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚĄ ŪŹČÍįÄŪē† žąė žěąŽŹĄŽ°Ě ÍĶ¨žĄĪŪēėžėÄŽč§.
žēĄžöłŽü¨ Ūē≠Ž°úž∂ĒžĘÖ žčúžěĎ žčú, žĄ†Žįē Ž™®ŽćłžĚė ŪĒĄŽ°úŪ醎ü¨ ŪöĆž†ĄžąėŽäĒ 93rpm(revolution per minutes)žúľŽ°ú Í≥†ž†ēŪēėÍ≥†, žÜ掏ĄŽäĒ 9.5m/s(žēĹ 18.5kts)Ž°ú ž†ēŪēėžėÄŽč§.
3.3 žčúŽģ¨Ž†ąžĚīžÖė Í≤įÍ≥ľ ŽįŹ Ž∂ĄžĄĚ
žčúŽģ¨Ž†ąžĚīžÖė Í≤įÍ≥ľŽäĒ ŽĎź ÍįÄžßÄ Žį©Ž≤ēžĚĄ žĚīžö©Ūēėžó¨ Ž∂ĄžĄĚŪēėžėÄŽäĒŽćį, ŪēėŽāėŽäĒ Ūē≠Ž°úž∂ĒžĘÖžĚė žčúÍįĀž†Ā Ž∂ĄžĄĚžĚīÍ≥†, Žč§Ž•ł ŪēėŽāėŽäĒ Ūē≠Ž°úž∂ĒžĘÖ ŪŹČÍįÄ Ž≥ÄžąėžĚė ž†ēŽüČž†Ā Ž∂ĄžĄĚžĚīŽč§.
3.3.1 žčúÍįĀž†Ā Ž∂ĄžĄĚ
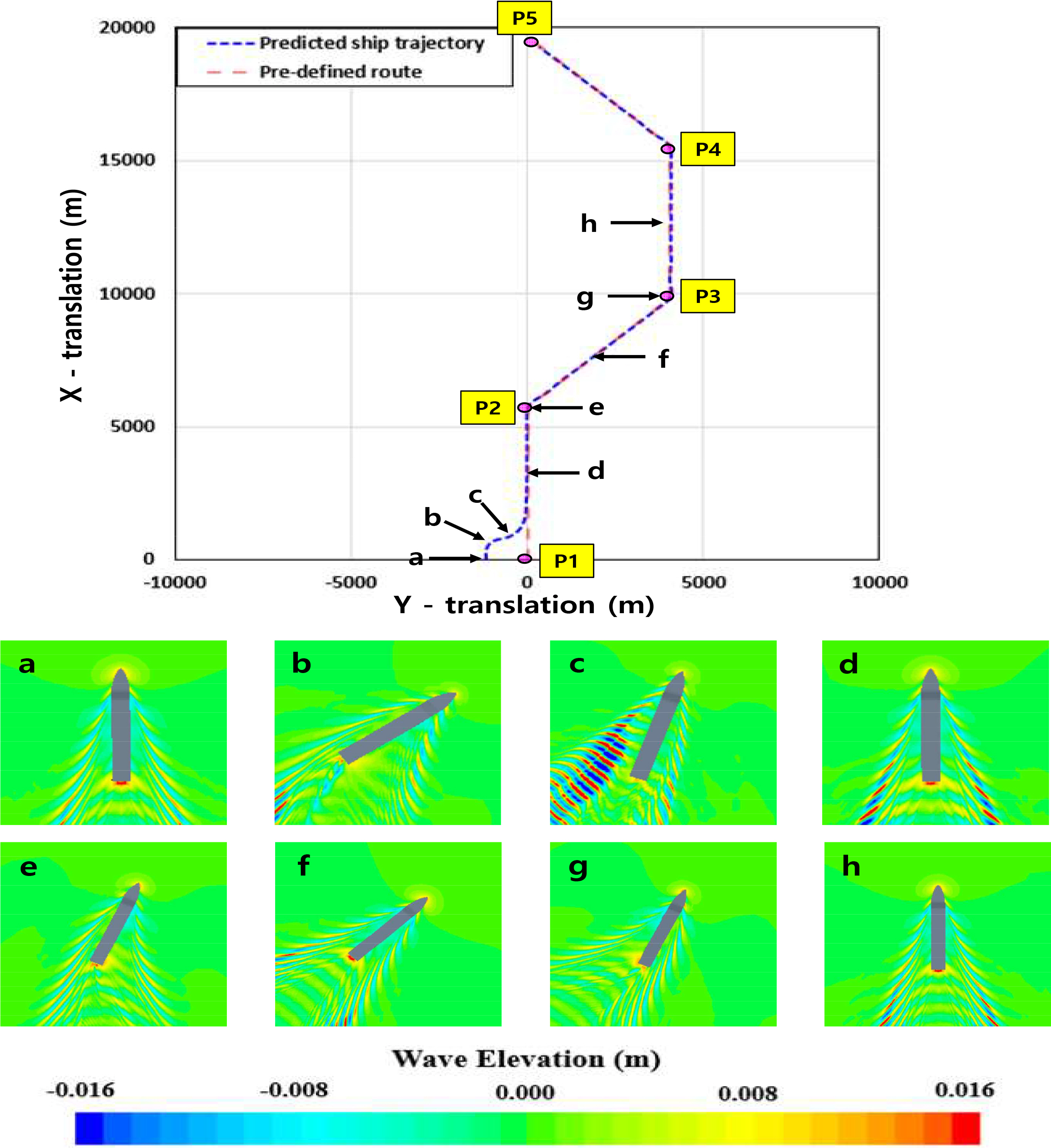
Fig. 4ŽäĒ Í≥ĄŪöćŪē≠Ž°úžóź ŽĆÄŪēú Ūē≠Ž°úž∂ĒžĘÖžĚė ÍįÄžčúŪôĒ Í≤įÍ≥ľŽ•ľ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, Í∑łŽ¶ľžĚĄ žĄ§Ž™ÖŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
žÉĀŽč® Í∑łŽ¶ľžĚÄ Ūē≠Ž°úž∂ĒžĘÖ Í≤įÍ≥ľŽ•ľ ŽĮłŪĄį(m) Žč®žúĄžĚė x-y ŪŹČŽ©īžĘĆŪĎúžóź ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, ž†ĀžÉČžĚė Íłī ž†źžĄ†žĚÄ Í≥ĄŪöćŪē≠Ž°úŽ•ľ ŽāėŪÉÄŽāīÍ≥†, ž≤≠žÉČžĚė žßßžĚÄ ž†źžĄ†žĚÄ ž∂ĒžĘÖŪē≠Ž°úŽ•ľ ŽāėŪÉÄŽāłŽč§. 5žĘÖžĚė žúĄžĻė(P1, P2, P3, P4, P5)ŽäĒ Í≥ĄŪöćŪē≠Ž°úžĚė Ž≥ÄžĻ®žßÄž†źžĚĄ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú P1Í≥ľ P5ŽäĒ Í≥ĄŪöćŪē≠Ž°úžĚė ž∂úŽįúÍ≥ľ ŽŹĄžį© žúĄžĻėŽ•ľ ÍįĀÍįĀ ŽāėŪÉÄŽāłŽč§. žēĄžöłŽü¨, 8žĘÖžĚė žúĄžĻė(a, b, c, d, e, f, g, h)ŽäĒ Ūē≠Ž°úž∂ĒžĘÖ Í≤įÍ≥ľžĚė ÍįÄžčúŪôĒ žúĄžĻėŽ•ľ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, aŽäĒ Ūē≠Ž°úž∂ĒžĘÖžĚė žčúžěĎžúĄžĻėŽ•ľ ŽāėŪÉÄŽāłŽč§. ažĚė žúĄžĻėŽäĒ P1žóźžĄú žĘĆžł°žúľŽ°ú 1,150m(5LBP) žĚīÍ≤©Žźú žßÄž†źžúľŽ°ú ž†ēŪēėžėÄŽč§. žĚīžôÄ ÍįôžĚī Ūē≠Ž°úž∂ĒžĘ̥֞ P1žĚī žēĄŽčĆ ažĚė žúĄžĻėžóźžĄú žčúžěĎŪēú žĚīžú†ŽäĒ, Ūē≠Ž°úž∂ĒžĘÖ žīąÍłį Žč®Í≥ĄžóźžĄú Í≥ĄŪöćŪē≠Ž°úŽ•ľ Ž≤óžĖīŽāú Í≤ĹžöįžĚė Ūē≠Ž°úž∂ĒžĘÖ ŪėĄžÉĀžĚĄ Ž∂ĄžĄĚŪēėÍłį žúĄŪēú Í≤ÉžĚīŽč§.
ŪēėŽč® Í∑łŽ¶ľžĚÄ žÉĀŽč® Í∑łŽ¶ľžóź ŽāėŪÉÄŽāł 8žĘÖ žúĄžĻėžóźžĄú žėąžł°Ūēú žĄ†ž≤ī ž£ľžúĄžóź ŽįúžÉĚŪēú žěźžú† žąėŽ©īžóź ŽĆÄŪēú ÍįÄžčúŪôĒ Í≤įÍ≥ľŽ•ľ ŽāėŪÉÄŽāłŽč§. žĄ†ŽįēžĚė žĘĆŪėĄÍ≥ľ žöįŪėĄ žł°žóź ŽāėŪÉÄŽāł Ž¨ľÍ≤į ŪėēžÉĀžĚÄ Ūē≠Ž°úž∂ĒžĘÖ ž§Ď ŽįúžÉĚŪēú žľąŽĻąŪĆĆŽ•ľ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, žĚīŽü¨Ūēú žľąŽĻąŪĆĆŽäĒ žĄ†ŽįēžĚė ŪĚėžąėŽ°úŽ∂ÄŪĄį Í≥ĄžāįŪēú ŪĆĆÍ≥† ŽÜížĚīžóź ŽĒįŽĚľ žÉČÍĻĒŽ°ú ÍĶ¨Ž≥ĄŽźúŽč§. žĽ¨Žü¨ ŽßČŽĆÄŽäĒ žľąŽĻąŪĆĆžĚė ŪĆĆÍ≥†(m)Ž•ľ ŽāėŪÉÄŽāłŽč§.
Fig. 4žĚė ÍįÄžčúŪôĒ Í≤įÍ≥ľŽ•ľ Ž∂ĄžĄĚŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
1) žÉĀŽč® Í∑łŽ¶ľžóźžĄú, ažĚė žúĄžĻėžóźžĄú Ūē≠Ž°úž∂ĒžĘ̥֞ žčúžěĎŪēú žĄ†ŽįēžĚī bžôÄ cžĚė žúĄžĻėŽ•ľ Í≤Ĺžú†Ūēėžó¨ ž†źžį® P1Í≥ľ P2 žā¨žĚīžĚė žßĀžĄ† Ūē≠Ž°úžóź Í∑ľž†ĎŪēėÍ≥† žěąžĚƞ̥ Ž≥ľ žąė žěąŽč§. žēĄžöłŽü¨ P2žôÄ P5 žā¨žĚīžĚė Í≥ĄŪöćŪē≠Ž°úžóźžĄúŽŹĄ Ūē≠Ž°úž∂ĒžĘÖžóź žĄĪÍ≥ĶŪē®žĚĄ Ž≥ľ žąė žěąŽč§.
2) ŪēėŽč® Í∑łŽ¶ľžóźžĄú, 8žĘÖžĚė ÍįĀ žúĄžĻėžóźžĄú ŽįúžÉĚŪēú žĄ†Žįē ž£ľžúĄžĚė žěźžú† žąėŽ©īžĚĄ Ž≥ľ žąė žěąŽč§. žīąÍłį ažĚė žúĄžĻėžóźžĄú žĄ†ŽįēžĚī žßĀžßĄŪēú Í≤įÍ≥ľ žľąŽĻąŪĆĆŽäĒ žĘĆžöį ŽĆÄžĻ≠žúľŽ°ú ŽįúžÉĚŪēėÍ≥†, bžĚė žúĄžĻėžóźžĄúŽäĒ Í≥ĄŪöćŪē≠Ž°úŽ•ľ ž∂ĒžĘÖŪēėÍłį žúĄŪēėžó¨ žöįŪėĄ Ž≥ÄžĻ®Ūēú Í≤įÍ≥ľ žľąŽĻąŪĆĆŽäĒ žĘĆžöį ŽĻĄŽĆÄžĻ≠žúľŽ°ú ŽįúžÉĚŪēėÍ≥†, cžĚė žúĄžĻėžóźžĄúŽäĒ Žč§žčú Í≥ĄŪöćŪē≠Ž°úžóź ž†ēžĻ®ŪēėÍłį žúĄŪēėžó¨ žĘĆŪėĄ Ž≥ÄžĻ®Ūēú Í≤įÍ≥ľ žĘĆŪėĄ Ž∂ÄŽ∂Ąžóź žöįŪėĄ Ž∂ÄŽ∂ĄŽ≥īŽč§ ŽćĒ ŽÜížĚÄ ŪĆĆÍ≥†žĚė žľąŽĻąŪĆĆÍįÄ ŽįúžÉĚŪēúŽč§. žĚīžĖīžĄú džĚė žúĄžĻėžóźžĄúŽäĒ Í≥ĄŪöćŪē≠Ž°úŽ•ľ žßĀžĄ†žúľŽ°ú ž∂ĒžĘÖŪēú Í≤įÍ≥ľ žľąŽĻąŪĆĆÍįÄ ŽĆÄžĻ≠žúľŽ°ú ŽįúžÉĚŪē®žĚĄ Ž≥ľ žąė žěąŽč§. žĚīŪõĄ eŽ∂ÄŪĄį hÍĻĆžßÄžĚė žúĄžĻėžóźžĄú ŽįúžÉĚŪēėŽäĒ Žč§žĖĎŪēú žľąŽĻąŪĆĆžĚė ŪėēžÉĀžĚĄ Ž≥ľ žąė žěąŽč§.
žĚīžôÄ ÍįôžĚÄ žĄ†Žįē ž£ľŽ≥ÄžĚė žěźžú† žąėŽ©īžĚĄ žľąŽĻąŪĆĆŽ•ľ žĚīžö©Ūēėžó¨ žčúÍįĀŪôĒŪē®žúľŽ°úžć® Ūē≠Ž°úž∂ĒžĘÖžóź ÍīÄŪēú žú†ž≤īžó≠Ūēôž†Ā ŪėĄžÉĀžĚĄ žČĹÍ≤Ć žĚīŪēīŪē† žąė žěąžĚƞ̥ žēĆ žąė žěąŽč§.
3.3.2 ž†ēŽüČž†Ā Ž∂ĄžĄĚ
Fig. 5žôÄ Fig. 6žĚÄ Ūē≠Ž°úž∂ĒžĘÖ ŪŹČÍįÄ Ž≥ÄžąėžĚė ž†ēŽüČŪôĒ Í≤įÍ≥ľŽ•ľ žčúÍ≥Ąžóī Í∑łŽěėŪĒĄŽ°ú ŽāėŪÉÄŽāł Í≤ÉžĚīŽč§.
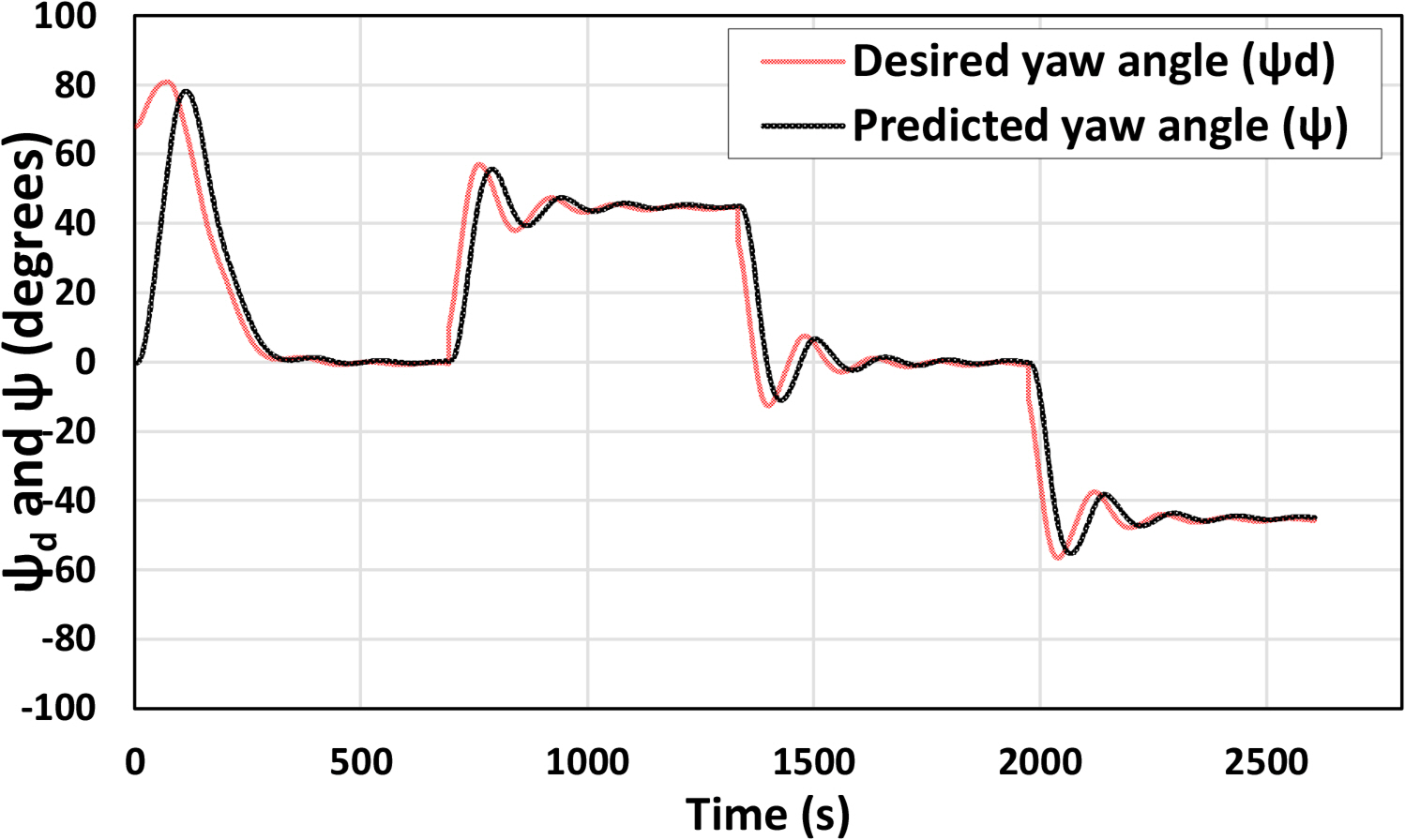
Fig 5ŽäĒ Ūē≠Ž°úž∂ĒžĘÖ ž§Ď Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀÍ≥ľ ž∂Ēž†ē žĄ†žąėŽį©žúĄÍįĀžĚĄ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, x-ž∂ēžĚÄ žīą(s) Žč®žúĄžĚė žčúÍįĄžĚĄ ŽāėŪÉÄŽāīÍ≥†, y-ž∂ēžĚÄ Žį©žúĄÍįĀžĚĄ ŽāėŪÉÄŽāłŽč§. ž†ĀžÉČ žč§žĄ†žĚÄ Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀ(ŌÜd)Ž•ľ ŽāėŪÉÄŽāīÍ≥†, Í≤ÄžĚÄ žč§žĄ†žĚÄ ž∂Ēž†ē žĄ†žąėŽį©žúĄÍįĀ(ŌÜ)Ž•ľ ŽāėŪÉÄŽāłŽč§.
Fig. 5Ž•ľ Ž∂ĄžĄĚŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
1) 0žīąžóźžĄú žēĹ 100žīą ÍĶ¨ÍįĄžóźžĄú Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀÍ≥ľ ž∂Ēž†ē žĄ†žąėŽį©žúĄÍįĀžóź ŪĀį žį®žĚīÍįÄ ŽāėŪÉÄŽā¨Žč§. ŪĀį žį®žĚīÍįÄ ŽįúžÉĚŪēú žĚīžú†ŽäĒ, Ūē≠Ž°úž∂ĒžĘÖ žčúžěĎ žčú žīąÍłį žĄ†ŽįēžúĄžĻėŽ•ľ Í≥ĄŪöćŪē≠Ž°úžĚė ž∂úŽįúžßÄž†źžĚł P1žóźžĄú žĘĆžł°žúľŽ°ú 1,150m(5LBP) žĚīÍ≤©žčúžľįÍ≥†, žĚīŽ°ú žĚłŪēī LOS žēĆÍ≥†Ž¶¨ž¶ėžóź žĚėŪēī Ž™©ŪĎú žĄ†žąė Žį©žúĄÍįĀžĚī žÉĀŽĆÄž†ĀžúľŽ°ú ŪĀį Íįí(žēĹ 80ŽŹĄ)žĚĄ ž∂úŽ†•ŪĖąÍłį ŽēĆŽ¨łžĚīŽč§. ŪĀį žį®žĚīÍįÄ ŽįúžÉĚŪēú žĚīŪõĄžóź ž∂Ēž†ē žĄ†žąėŽį©žúĄÍįĀžĚī ž†źžį® Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžóź ÍįÄÍĻĆžõĆžßźžĚĄ Ž≥ľ žąė žěąŽč§.
2) žēĹ 100žīąžóźžĄú žēĹ 2700žīąžĚė ÍĶ¨ÍįĄžóźžĄúŽäĒ žĄł Ž≤ąžĚė Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžĚė ÍłČÍ≤©Ūēú Ž≥ÄŪôĒÍįÄ ŽāėŪÉÄŽā®žĚĄ Ž≥ľ žąė žěąŽč§. žĚīŽü¨Ūēú ÍłČÍ≤©Ūēú Žį©žúĄžĚė Ž≥ÄŪôĒŽäĒ žēĹ 770žīą Ž∂ÄÍ∑ľžĚė 45ŽŹĄžóźžĄú ŽāėŪÉÄŽāėÍ≥†, žēĹ 1400žīą Ž∂ÄÍ∑ľžĚė 0ŽŹĄžóźžĄú ŽāėŪÉÄŽāėŽ©į, žēĹ 2070žīą Ž∂ÄÍ∑ľžĚė -45ŽŹĄžóźžĄú ŽāėŪÉÄŽāúŽč§. žĚīŽü¨Ūēú žĄł Ž≤ąžĚė ÍłČÍ≤©Ūēú Žį©žúĄŽ≥ÄŪôĒŽäĒ žĄł Ž≥ÄžĻ®žßÄž†ź(P2, P3, P4) Ž∂ÄÍ∑ľžóźžĄú ŽįúžÉĚŪēú Í≤ɞ̳Žćį, žĄ†ŽįēžĚī ÍįĀ Ž≥ÄžĻ®žßÄž†źžóź ŽŹĄŽč¨Ūēú Ží§ Žč§žĚĆ žßĀžßĄŪē≠Ž°úŽ•ľ ž∂ĒžĘÖŪēėÍłį žúĄŪēú žÉąŽ°úžöī Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžĚī LOS žēĆÍ≥†Ž¶¨ž¶ėžóź žĚėŪēī Í≥ĄžāįŽźú Í≤įÍ≥ľžĚīÍłį ŽēĆŽ¨łžĚīŽč§.
3) Ūē≠Ž°úž∂ĒžĘÖžĚė Ž™®Žď† ÍĶ¨ÍįĄžĚĄ Ž≥īŽ©ī, ž∂Ēž†ēŪēú žĄ†žąėŽį©žúĄÍįĀžĚī Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžĚĄ ž∂ĒžĘÖŪē† ŽēĆ žēĹÍįĄžĚė žčúÍįĄžßÄžóįžĚĄ ŪôēžĚłŪē† žąė žěąŽäĒŽćį, žĚīŽäĒ žė§Ū܆ŪĆƞ̾ŽüŅžĚė ŪÉÄÍįĀ Ž™ÖŽ†Ļžóź žĚėŪēú žĄ†ŽįēžĚė ž¶ČÍįĀž†ĀžĚł žĄ†ŪöĆÍįÄ Ž¨ľŽ¶¨ž†ĀžúľŽ°ú Ž∂ąÍįÄŽä•ŪēėÍłį ŽēĆŽ¨łžĚł Í≤ÉžúľŽ°ú Í≥†Ž†§ŽźúŽč§.
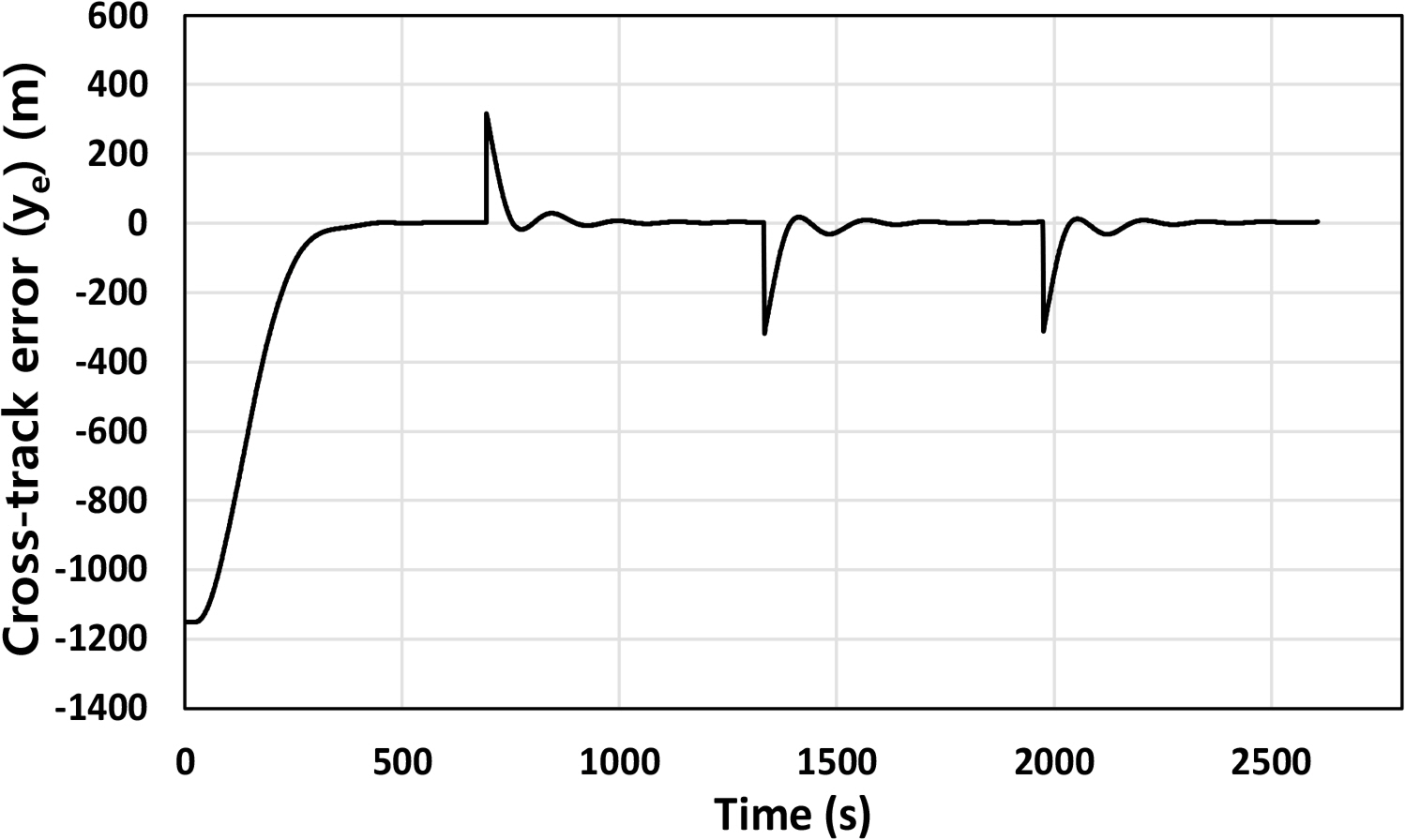
Fig. 6žĚÄ Ūē≠Ž°úžĚīŪÉą Ūéłžį®Ž•ľ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, x-ž∂ēžĚÄ žīą(s) Žč®žúĄžĚė žčúÍįĄžĚĄ ŽāėŪÉÄŽāīÍ≥†, y-ž∂ēžĚÄ Ūē≠Ž°úžĚīŪÉąŪéłžį®Ž•ľ ŽāėŪÉÄŽāłŽč§. Í≤ÄžĚÄ žč§žĄ†žĚÄ Í≥ĄŪöćŪē≠Ž°úžôÄ ž∂ĒžĘÖŪē≠Ž°ú žā¨žĚīžĚė Ūē≠Ž°úžĚīŪÉąŪéłžį®(ye)Ž•ľ ŽāėŪÉÄŽāł Í≤ÉžúľŽ°ú, žĚĆ(-)žĚė Ūē≠Ž°úžĚīŪÉąŪéłžį® ÍįížĚÄ žĄ†ŽįēžĚī Í≥ĄŪöćŪē≠Ž°úžĚė žĘĆžł°žóź žúĄžĻėŪē®žĚĄ žĚėŽĮłŪēėÍ≥†, ŽįėŽĆÄŽ°ú žĖĎ(+)žĚė Ūē≠Ž°úžĚīŪÉą Ūéłžį® ÍįížĚÄ žĄ†ŽįēžĚī Í≥ĄŪöćŪē≠Ž°úžĚė žöįžł°žóź žúĄžĻėŪē®žĚĄ žĚėŽĮłŪēúŽč§.
Fig. 6žĚĄ Ž∂ĄžĄĚŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
1) 0žīąžóźžĄú, Ūē≠Ž°úžĚīŪÉąŪéłžį®ÍįÄ -1150mžúľŽ°ú ŽāėŪÉÄŽā¨ŽäĒŽćį, Í∑ł žĚīžú†ŽäĒ Ūē≠Ž°úž∂ĒžĘÖ žčúžěĎ žčú žĄ†ŽįēžúĄžĻėÍįÄ Í≥ĄŪöćŪē≠Ž°úžĚė ž∂úŽįúžßÄž†źžĚł P1žóźžĄú žĘĆžł° 1,150m(5LBP)žúľŽ°ú žĚīÍ≤©žčúžľįÍłį ŽēĆŽ¨łžĚīŽč§.
2) 0žīąžóźžĄú žēĹ 400žīąžĚė ÍĶ¨ÍįĄžĚĄ Ž≥īŽ©ī, Ūē≠Ž°úžĚīŪÉąŪéłžį®žĚė ŪĀ¨ÍłįÍįÄ ž†źžį® ÍįźžÜĆŪēėžó¨ žėĀ(0)žóź žąėŽ†īŪē®žĚĄ Ž≥ľ žąė žěąŽč§. žĚīŽ•ľ ŪÜĶŪēī žĄ†ŽįēžĚī LOS žēĆÍ≥†Ž¶¨ž¶ėžóź žĚėŪēī žÉĚžĄĪŽźú Ž™©ŪĎú žĄ†žąėŽį©žúĄÍįĀžĚĄ ž∂ĒžĘÖŪēėÍ≥† žěąžĚƞ̥ žēĆ žąė žěąŽč§.
3) žēĹ 400žīą žĚīŪõĄžĚė ÍĶ¨ÍįĄžĚĄ Ž≥īŽ©ī, žĄł Ž∂ÄŽ∂Ą(žēĹ 770žīą, žēĹ 1400žīą Í∑łŽ¶¨Í≥† žēĹ 2070žīą)žóźžĄú Ūē≠Ž°úžĚīŪÉąŪéłžį®ÍįÄ ÍłČÍ≤©Ūěą žēĹ 270mÍĻĆžßÄ ž¶ĚÍįÄŪēėŽč§ÍįÄ žėĀ(0)žúľŽ°ú žąėŽ†īŪē®žĚĄ Ž≥ľ žąė žěąŽč§. žĚīŽü¨Ūēú ŪėĄžÉĀžĚÄ žúĄžĚė Fig. 5žóź ŽāėŪÉÄŽāł žĄł Ž≥ÄžĻ®žßÄž†ź(P2, P3, P4) Ž∂ÄÍ∑ľžóźžĄú žĄ†ŽįēžĚī Žč§žĚĆ žßĀžĄ† Ūē≠Ž°úŽ•ľ ž∂ĒžĘÖŪē† ŽēĆ ŽįúžÉĚŪēú Í≤ÉžúľŽ°ú, žĚīŽü¨Ūēú Ūē≠Ž°úžĚīŪÉąŪéłžį®žĚė žõźžĚłžĚÄ Í≥ĄŪöćŪē≠Ž°úÍįÄ žč§ž†ú žĄ†ŽįēžĚė žĄ†ŪöĆ ŪäĻžĄĪžĚĄ ŽįėžėĀŪēú Í≥°žĄ† Ūē≠Ž°úÍįÄ žēĄŽčąŽĚľ žßĀžĄ† Ūē≠Ž°úžĚė ž°įŪē©žúľŽ°ú žĚīŽ£®žĖīž°ĆÍłį ŽēĆŽ¨łžĚīŽč§. Ž≥ÄžĻ®žßÄž†ź Ž∂ÄÍ∑ľžóźžĄú ÍłČÍ≤©Ūěą ž¶ĚÍįÄŪēėŽäĒ Ūē≠Ž°úžĚīŪÉąŪéłžį®ŽäĒ žĄ†Žįē žēąž†ĄžĚĄ ž†ÄŪēīŪēėŽäĒ ŪēėŽāėžĚė žöĒžĚłžĚī Žź† žąė žěąŽč§. žĚīŽü¨Ūēú ŪėĄžÉĀžĚÄ žč§ž†ú žĄ†ŽįēžĚė žĄ†ŪöĆ ŪäĻžĄĪžĚĄ ŽįėžėĀŪēú Í≥°žĄ† Ūē≠Ž°úŽ•ľ žĚīžö©ŪēėŽ©ī ŪēīÍ≤į ÍįÄŽä•Ūē† Í≤ÉžúľŽ°ú Í≥†Ž†§ŽźėÍ≥†, Ž≥ł žóįÍĶ¨žóźžĄú žĚīžóź ÍīÄŪēīžĄúŽäĒ ž∂ĒŪõĄ žóįÍĶ¨ŽźėžĖīžēľ Ūē† Ž¨łž†úŽ°ú ŽĎĒŽč§.
4. Í≤į Ž°†
Ž≥ł žóįÍĶ¨žóźžĄúŽäĒ žěźžú®žöīŪē≠žĄ†ŽįēžĚė Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚĄ žčúÍįĀž†Ā ŽįŹ ž†ēŽüČž†ĀžúľŽ°ú ŪŹČÍįÄŪē† žąė žěąŽäĒ ÍłįŽ≤ēžĚĄ ž†úžēąŪēėžėÄŽč§. žóįÍĶ¨Í≤įÍ≥ľŽ•ľ ž†ēŽ¶¨ŪēėŽ©ī Žč§žĚĆÍ≥ľ ÍįôŽč§.
ž≤ęžßł, CFD ÍłįŽįėžĚė žěźžú† Ūē≠ž£ľ Ž™®ŽćłÍ≥ľ LOS žēĆÍ≥†Ž¶¨ž¶ėžĚĄ žóįÍ≥ĄŪēėžó¨ žěźžú®žöīŪē≠žĄ†ŽįēžĚė Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žĚė ŪŹČÍįÄÍįÄ ÍįÄŽä•Ūē®žĚĄ žēĆžēėŽč§.
ŽĎėžßł, CFD žÜĆŪĒĄŪäłžõ®žĖīŽ•ľ žĚīžö©Ūēėžó¨ žĄ†Žįēžóź žĚėŪēī ŽįúžÉĚŪēú žľąŽĻąŪĆĆŽ•ľ ÍįÄžčúŪôĒŪē®žúľŽ°úžć® Ūē≠Ž°úž∂ĒžĘÖ ž§Ď ŽįúžÉĚŪēėŽäĒ žĄ†Žįē ž£ľžúĄžĚė žú†ŽŹô ŪėĄžÉĀžĚĄ žčúÍįĀž†ĀžúľŽ°ú Ž≥ľ žąė žěąžĚƞ̥ ŪôēžĚłŪēėžėÄŽč§.
žÖčžßł, Ūē≠Ž°úž∂ĒžĘÖ ž§Ď Ž≥ÄžĻ®žßÄž†ź Ž∂ÄÍ∑ľžóźžĄú Ūē≠Ž°úžĚīŪÉąŪéłžį®ÍįÄ ŪĀ¨Í≤Ć ŽįúžÉĚŪē®žĚĄ žēĆžēėŽč§.
Ūē≠Ž°úž∂ĒžĘÖ ž§Ď Ž≥ÄžĻ®žßÄž†ź Ž∂ÄÍ∑ľžóźžĄú ÍłČÍ≤©Ūěą ž¶ĚÍįÄŪēėŽäĒ Ūē≠Ž°úžĚīŪÉąŪéłžį®ŽäĒ žĄ†Žįē žēąž†Ąžóź žėĀŪĖ•žĚĄ ž£ľŽäĒ ŪēėŽāėžĚė žöĒžĚłžĚī Žź† žąė žěąŽč§. žĚīžóź ÍīÄŪēīžĄúŽäĒ ž∂ĒŪõĄ žóįÍĶ¨Ūē† žėąž†ēžĚīŽč§.
Ž≥ł žóįÍĶ¨žóźžĄú ž†úžēąŪēú ŪŹČÍįÄÍłįŽ≤ēžĚÄ žěźžú®žöīŪē≠žĄ†Žįē žĄ§Í≥Ą žčú Ūē≠Ž°úž∂ĒžĘÖžĄĪŽä•žóź ÍīÄŪēú žčúÍįĀž†Ā ŽįŹ ž†ēŽüČž†Ā ŪŹČÍįÄžóź ž†Āžö© ÍįÄŽä•Ūē† Í≤ÉžúľŽ°ú ÍłįŽĆÄŽźúŽč§.

 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






