


1. 서 론
2016년 세계경제포럼인 다보스포럼에서 발표된 4차 산업혁명으로 인해 전 세계의 산업트렌드는 점점 빠르고 지능적으로 변화하고 있다. 4차 산업혁명은 3차 산업혁명을 기반으로 물리학, 디지털 등의 기술 융합을 통해 경계를 허물고 초연결성, 초지능화, 융복합화 등의 개념으로 상호 연결되는 것이 주요 특징으로 3대 핵심기술로는 디지털, 네트워크, 물리학이 있으 며, 5대 주요 기술로는 사물인터넷(IoT), 로봇 공학, 3D 프린팅, 빅데이터, 인공지능(AI)가 있다.
미국의 정보 기술 연구 및 자문 회사인 가트너는 이러한 4차 산업혁명의 흐름에 편승하여 2017년부터 산업의 미래를 주도할 자율 사물, 증강 분석, 인공지능 주도 개발 등의 10대 전략기술을 선정하였으며, 이 중 디지털 트윈은 2017년부터 2019년까지 주요 트렌드 기술에 빠짐없이 소개되고 있다.
디지털 트윈은 실제 사물이나 시스템, 환경 등을 가상 세계에 동일하게 구현하고, 이를 활용한 시뮬레이션 및 분석 등을 진행함으로써 불필요한 비용 및 시행착오를 감소시키는 획기적인 기술로 전 산업에서 주목받고 있다. 특히, 디지털 트윈은 스마트 시티, 스마트 팜, 제조업 등 다양한 분야에 적용하여 활용되어질 예정이며, 제조업에서는 우리나라의 한국전자통신 연구원(이하 ETRI)의 주도하에 디지털 트윈의 국제 표준화를 추진하고 있다(Lee et al, 2020).
항만 역시 COVID-19, 미·중 무역분쟁 등 외부의 위협에 대응하고 타 항만과의 경쟁에서 우위를 점하기 위해 4차 산업혁명 기술 도입을 적극 추진하고 있다. 특히, 항만은 GSCM의 강조와 항만의 안전성 및 효율성을 한번에 해결할 수 있는 디지털 트윈 기술에 많은 관심을 가지고 있으며, 싱가포르항, 로테르담항, 함부르크항 등 외국 항만을 중심으로 디지털 트윈 기술의 항만 적용을 위한 연구를 활발하게 진행하고 있다.
우리나라의 부산항 역시 2021년 항만의 디지털 트윈 기술 적용을 위해 과학기술정보통신부, 해양수산부, 한국지능정보 사회진흥원 등과 함께 총 46억원을 투입하여 5G기반 디지털 트윈 공공선도 스마트항만 물류 플랫폼 구축을 위한 실증 사업을 시작하였다.
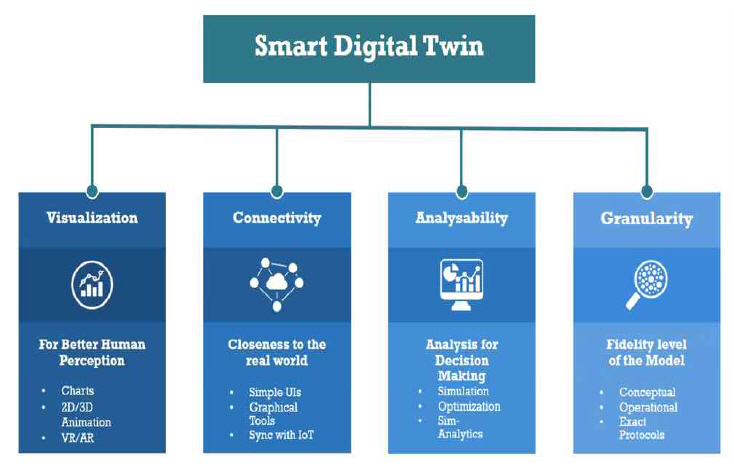
하지만 아직까지 항만 디지털 트윈에 대한 정의는 확실하게 정해지지 않았으며, 항만 디지털 트윈에 대한 심층적인 연구 역시 부족한 실정이다. 특히, 항만의 디지털 트윈이 구체화 되기 위해서는 사용자의 인지를 돕는 가시성, 현실 세계와의 연결성, 합리적 의사결정을 위한 분석 가능성, 모델의 정확성 수준을 위한 세분성이 필요하나(NUS, 2021), 이를 뒷밤침 할 측정 가능한 데이터에 대한 조사가 부족한 실정이다.
따라서 본 연구는 각 산업에서 디지털 트윈 적용을 위한 노력 및 개념을 고찰하고, 이를 바탕으로 항만의 디지털 트윈에 대한 정의를 정립하고자 한다. 또한, 항만 시뮬레이션 및 디지털 트윈 관련 선행연구와 디지털 트윈 기술을 개발 및 적용하고 있는 항만사례에서 컨테이너 항만에 디지털 트윈 기술을 적용하기 위해 측정 가능한 데이터를 조사하는 탐색적 연구를 수행하고자 한다. 탐색적 연구를 통해 도출된 결론을 바탕으로 탐색적 요인분석, 신뢰성 분석, 확인적 요인분석 및 구조방정식을 통해 측정 가능한 세부데이터를 디지털 트윈 기술의 컨테이너 항만 적용을 위해 요인화하고자 한다.
2. 이론적 고찰
2.1 디지털 트윈의 개요
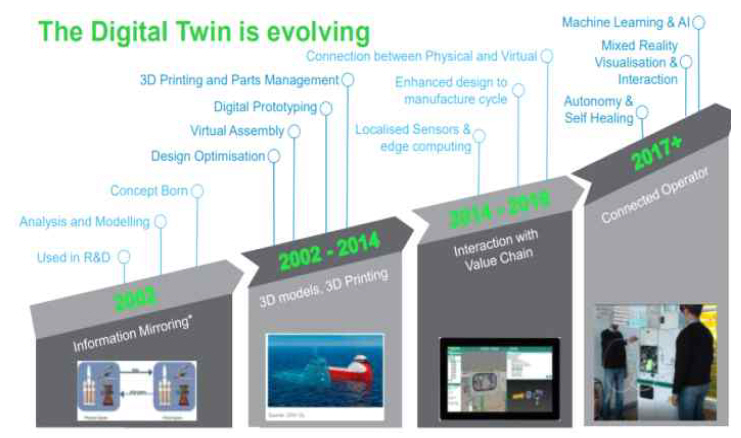
디지털 트윈은 2002년 미국의 마이클 그리브스 박사가 제조엔지니어협회의 컨퍼런스에서 제품생명주기(Product Lifecycle Management) 관점에서 최초로 제안하였다 (Michael. 2016). 2010년 미국의 항공우주국인 NASA는 로드맵 보고서에 디지털 트윈의 이름을 명명하고, 2012년 차량이나 시스템의 최고의 활용을 위한 다중 규모, 다중 물리학 등이 통합된 확률론적 시뮬레이션 방법으로 디지털 트윈을 언급하였다(NASA, 2010-2012). 이후 2016년 GE의 프레딕스와 지멘스의 마인드 스피어와 같이 클라우드를 기반으로 하는 제조업 측면의 가치사슬과 상호작용 하는 형태의 디지털 트윈이 나타나기 시작하였으며, 2018년 싱가포르의 버츄얼 싱가포르와 같이 전 영역의 운영에 걸친 연결성을 강조한 형태로 디지털 트윈은 진화하고 있다.
하지만 현재 디지털 트윈의 정확한 정의는 아직 정해지지 않았으며, 산업별 적용방법이나 기술자의 바라보는 관점에 따라 정의를 달리하고 있다. 이에 기관별 디지털 트윈에 대해 정의한 내용의 공통점을 기반으로 디지털 트윈의 정의를 정리하였다.
NASA(2012)는 물리적 모델이나 센서 데이터 등을 활용한 여 차량이나 시스템의 최고의 활용을 위해 통합된 다중 규모, 다중 물리학이 적용된 확률론적 시뮬레이션이라 디지털 트윈을 정의하였다. 또한, 디지털 트윈을 통해 매우 현실적이고 에너지 저장장치, 항공전자장치 등 하나 또는 여러 개의 중요하고 상호의존적인 차량 시스템을 고려할 수 있다고 설명하였다.
DAU(2016)는 디지털 스레드를 통해 구현되는 통합 다중물리, 다중 스케일, 확률론적 시스템 시뮬레이션으로 최상의 모델, 센서 데이터 및 인풋 데이터를 통해 물체의 생애주기 동안의 활동 및 성능을 예측하는 것을 디지털 트윈이라 정의하였다.
Deloitte(2017)는 여러 차원에 걸친 대규모의 누적된 실시간 혹은 실세계 데이터 측정값을 기반으로 한 사업 실적의 최적화에 도움을 주는 물리적 물체나 프로세스의 과거와 현재 활동이 기록된 디지털 프로필을 디지털 트윈이라 정의하였다.
GE(2017)는 실시간 분석을 통한 감지, 방지, 예측 및 최적화하도록 설계된 시스템 또는 프로세스의 소프트웨어 표현이라 디지털 트윈을 정의하고 있다. 이를 통해 사용자가 안정성및 가용성 향상, 위험 감소, 유지보수 비용 절감 등 다양한 이점을 얻을 수 있다고 강조하였다.
Gartner(2018)는 실제 세계의 객체와 시스템의 디지털 표현을 디지털 트윈이라 정의하였으며, 디지털 트윈의 구현은 고유한 물리적 객체, 프로세스, 조직 등 물리적 객체의 소프트웨어화를 통해 이뤄진다고 하였다. 이를 통해 기업은 자산의 상태, 변화 대응, 비즈니스 환경 개선 등 가치를 효과적으로 추가할 수 있다고 설명하였다.
NTT(2019)는 여러 개의 디지털 트윈 간 교환, 변환, 복제 등을 통해 실제 세계의 인간과 사물을 사이버 공간에서 제한없이 재현하고 상호 작용할 수 있도록 하는 것을 디지털 트윈이라 정의하였다. 이를 통해 단순히 물리적 물체의 관측 또는 제어를 넘어 사이버 공간상의 사람과 물체 간의 의사소통을 강화하는 것을 목적으로 하였다.
국토교통부는(2020)는 3차원 디지털 공간에 현실공간 및 사물의 쌍둥이를 구현하는 것이라 디지털 트윈을 정의하였으며, 디지털 트윈을 활용한 시뮬레이션 분석과 예측을 통해 신산업 지원 및 국토 안전관리를 강화하는데 활용하고자 하였다.
정보통신기획평가원(2021)은 물리적 대상과 디지털 대상을 실시간 동기화하여 사용자의 목적에 의거해 상황을 분석하고 모의결과 기반의 물리적 대상 최적화를 위한 지능형 기술 플랫폼이라 디지털 트윈을 정의하였다.
각 기관의 디지털 트윈에 대한 정의를 취합한 결과 디지털 트윈은 현실공간에 개선 가능한 목표(사람, 공간, 프로세스 등)를 가상공간 내 구현하고, 구현한 목표에 데이터모델, 센서데이터 등을 활용한 실시간 시뮬레이션을 통해 발견한 최적해의 현실적용으로 개선하는 기술이라 할 수 있다.
디지털 트윈은 현실공간에 있는 목표를 가상공간에 동일하게 구현해야 하기에 많은 구성요소를 필요로 한다. 우선 디지털 트윈의 대상이 될 현실 세계의 객체와 이를 기반으로 한가상세계의 객체가 필요하다. 객체를 가상세계에 구현하였다면 현실세계의 객체가 존재하는 측정 가능한 환경을 가상 세계에 구현하고, 환경에 해당하는 매개변수의 측정값을 수집하여 계측, 실현, 트위닝 등의 상태 동기화가 필요하다. 또한, 현실 세계와 가상 세계 간 데이터 연결 및 프로세스 진행을 통해 디지털 트윈의 프로세스 상태를 측정하고, 디지털 트윈을 실현한다(David et al, 2020).
디지털 트윈의 프로세스는 구성요소를 바탕으로 생성 -> 전달 -> 종합 -> 분석 -> 통찰 -> 행동 순으로 진행된다 (Deloitte, 2017). 첫 번째 단계인 생성에서는 현실 객체와 주변 환경으로부터 동작에 영향을 미칠 수 있는 데이터 수집이나 디지털 트윈의 모형을 설계하는 단계이다. 이 과정에서 데이터 수집을 위한 센서나 카메라 등의 설치 역시 포함된다.
두 번째 단계인 전달에서는 현실과 가상공간의 실시간 양방향 통합 및 연결성을 지원한다. 이 과정에서 경계 프로세싱을 통한 데이터 규약 변환, 통신 인터페이스를 통한 정보 전달, 경계 보안을 통한 디지털 트윈 보안 솔루션 제공 등의 업무를 처리한다.
세 번째 단계인 종합에서는 데이터 분석을 위한 전처리 및 통합작업을 시행한다. 데이터 종합을 위해 기업들은 자신들이보유하고 있는 자체 보유 시스템 혹은 클라우드를 통해 작업을 할 수 있다.
네 번째 단계인 분석에서는 종합단계에서 전처리 및 통합작업된 데이터를 기반으로 데이터를 분석하고 시각화를 실시한다. 이 과정에서 여러 가지 분석기법과 기술을 활용하여 문제에 대한 통찰력이나 의사결정을 지원하는 모델을 창출할 수있다.
다섯 번째 단계인 통찰에서는 분석된 데이터를 바탕으로 추가적인 조사나 변화가 필요한 영역을 도출한다. 이 작업은 현실과 가상세계 간 수용 불가능한 정도의 차이를 대시보드와 시각화를 통해 제시하여 준다.
여섯 번째 단계인 행동에서는 데이터 통찰을 통해 얻은 결론을 바탕으로 현실이나 가상세계의 객체에 피드백하여 적용한다. 이 작업은 물리적 공정 상의 움직임이나 통제 매커니즘을 담당하는 작동장치로 통찰의 결과가 입력되는 것으로 이뤄지며, 이를 기반으로 현실 및 가상세계 객체의 상호작용을 연결한다. 6단계 프로세스를 통해 도출된 결론을 바탕으로 디지털 트윈은 국가 인프라, 제조 현장, 도시 산업 등 다양한 분야에서 활용되고 있다.
디지털 트윈의 기술수준은 총 3단계로 구분하여 정의된다 (Gartner, 2016). 1단계는 가장 단순한 단계로 3D 모델을 구축하고 가시화하는 단계로 디지털 트윈 모델에 데이터 속성 정보를 입력하여 3D 모델을 시각화하거나 속성 정보 변경 등을 통한 사전 시뮬레이션 단계까지라 정의하고 있다. 대표적인 1단계 디지털 트윈수준의 예로는 CAD, BIM, GIS 등이 있다. 2단계는 실시간 모니터링 단계로 IoT 플랫폼을 통한 실시간 센싱 데이터 수집과 현실 세계의 객체나 시스템이 가상 세계와 1 대 1 매칭 되어 모니터링 하는 단계라 정의하고 있다. 이 단계에서의 디지털 트윈은 프로세스 논리에 의해 운영되며, 실시간 모니터링이 가능하나 인간의 개입이 있어야 한다. 3단계는 디지털 트윈을 기반으로 분석이나 시뮬레이션을 실행하고 이를 적용하여 현실 세계의 객체를 제어하는 단계라 정의하고 있다. 이는 현실 세계를 가상 세계에 복제한 후 목표가 되는 가상 세계를 최적화하는 단계로 문제를 재현하여 원인을 분석할 수 있으며, 실시간 데이터 기반의 시뮬레이션을 통해 변화를 볼 수 있는 최종적 단계라 할 수 있다.
하지만 컴퓨터 기술, 네트워크 기술 등이 발달하고, 현실은 가상세계와 달리 다른 현상들과 구분되지 않고 상호 연계되는 부분이 있다. 이에 ETRI는 기존 3단계 기술수준의 정의에서 4-5단계의 기술발전을 추가한 디지털 트윈 기술발전의 5단계 정의 및 설명에 대해 제시하였다.
ETRI가 제시한 4단계에서는 Gartner가 2021년 중요성을 강조한 기술 간 연합의 개념을 적용하여 최적화된 디지털 트윈이 연합하여 상호 최적화하는 단계라 정의하고 있다. 이 단계에서 개별 디지털 트윈간의 연합을 통해 나타나는 전주기 흐름을 관측할 수 있다. 5단계는 개별 및 복합 디지털 트윈이 자율적으로 문제점을 인식하고 이를 해결하여 목표를 최적화하는 단계로 정의하였다. 이 단계에서 모든 디지털 트윈간 흐름이 실시간으로 통합되고 자동적으로 동기화되어 인간의 개입없이 최적화를 위한 동작이 수행되는 디지털 트윈의 궁극의 단계라 할 수 있다.
2.2 항만의 디지털 트윈
2.2.1 항만 디지털 트윈 정의 및 연구 현황
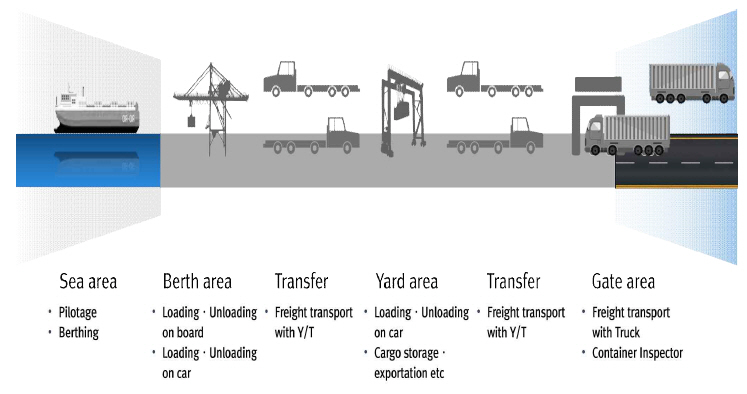
항만은 선박의 출입, 사람의 승·하선, 화물의 하역·보관 및 처리 등을 위한 시설로 최근 COVID-19, 미·중 무역분쟁 등 다양한 사회적 이슈로 인한 GSCM 관리의 중요성이 강조됨에 따라 항만의 중요성 역시 강조되고 있다. 항만의 영역은 주된 업무인 화물처리에 따라 구분되며, 수출·입, 환적 등의 물류적 프로세스가 존재하나, 크게 선박에서 하역서비스를 받는 선석영역과 터미널 게이트 및 선석에서 반·출입되는 화물을 처리하는 야드영역, 화물을 운송하는 트럭이 반·출입하는 게이트 영역으로 나눌 수 있다. 또한, 항만의 스마트화가 진행됨에 따라 해상운송이 진행되는 해상영역 역시 항만을 영역으로 포함하는 경우도 있다.
항만 디지털 트윈은 항만 프로세스상에 존재하는 부두, 차량, 건물 등 수천 개의 항만 인프라 시설과 장비에 IoT 센서를 부착하여 획득한 정보를 바탕으로 시뮬레이션 및 모델링 분석을 통해 항만의 노동 효율성, 최적화 된 운영 비용 및 항구 효율성 등을 제공하는 서비스이다. 싱가포르의 스마트 항만 디지털 트윈을 추진하고 있는 NUS는 2021년 8월 개최한항만 디지털 트윈 심포지엄에서 항만 디지털 트윈이 정상적으로 가동되기 위해서는 사용자가 쉽게 인지하기 위한 가시성, 현실 세계와의 연결성, 합리적 의사결정을 위한 분석가능성, 모델의 정확성 수준을 위한 세분성이 갖춰져야 한다고 말하였다. 이에 항만을 보유한 주요국가에서는 항만의 안전성과 지속가능한 발전을 위해 관련 기술을 개발하고 있으며, 이를 통해 성과에 대한 포괄적인 이해, 항만 장비에 대한 생애주기 관리 가능, 잠재적인 안전 위해 요소 제거 등의 다양한 이점이 발생할 것이라 기대하고 있다.
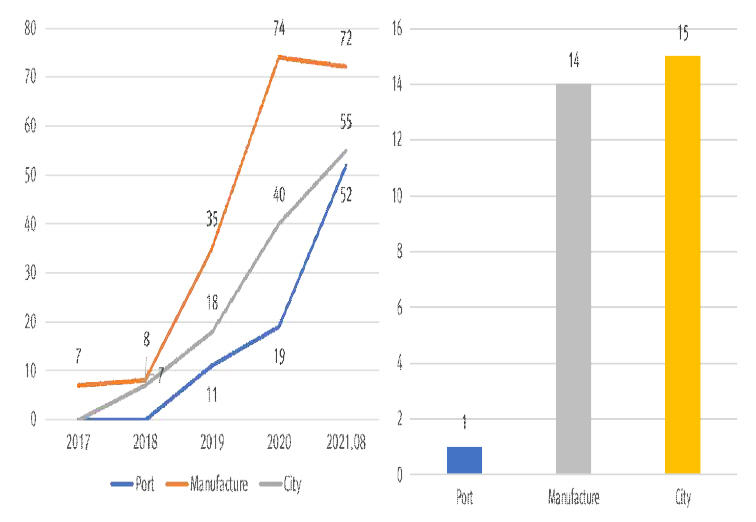
디지털 트윈은 각 국가 및 산업에서 기술의 중요성을 인식하고 관련 기술 개발 및 학술적 연구가 활발하게 진행중에 있다. 항만 분야 역시 2019년부터 디지털 트윈과 관련된 R&D 사업을 발주하고 있으며, 2021년 전체 디지털 트윈 연구 중 14.4%가 항만과 관련된 연구일 정도로 중요성을 부각하고 있다. 하지만 KCI 기준 항만 디지털 트윈과 관련된 연구가 1편에 불과할 정도로 타 산업의 디지털 트윈 연구에 비해 현재 진행수준이 미흡한 실정이며, 이로 인해 항만에서 디지털 트윈을 위해 선제적으로 조사되어야 할 측정 가능한 데이터에 대한 조사가 미흡하다. 이는 NUS가 항만 디지털 트윈을 위해 강조한 연결성과 분석가능성에 관련하여 항만 정보 및 상호작용 부족으로 효율적인 디지털 트윈 구축에 애로사항으로 작용할 것으로 보이며, 이를 해결하기 위해 항만의 측정 가능한 데이터에 대한 조사가 필요할 것으로 판단된다. 이에 본 연구는 선행연구 및 국외 항만의 디지털 트윈 적용 사례를 중심으로 컨테이너 항만 디지털 트윈을 위해 필요한 측정 가능한 데이터를 조사하고자 한다.
2.2.2 항만 디지털 트윈 관련 선행연구 및 사례
2.2.2.1 항만 디지털 트윈 관련 선행연구
항만은 디지털 트윈과 관련된 연구가 타 산업에 대비하여 미흡한 수준이며, 대외적으로 발표한 자료 역시 부족하다. 하지만 시뮬레이션을 이용한 항만 효율화는 꾸준하게 연구되어 왔으며, 2021년 NUS에서 진행한 항만 디지털 트윈 심포지엄에서 디지털 트윈은 시뮬레이션과 에뮬레이션의 최종단계라 설명하였다. 이에 항만 시뮬레이션을 활용한 선행연구와 항만 디지털 트윈 선행연구를 기반으로 항만 디지털 트윈을 위한 데이터 요소를 도출하고자 한다.
Luca et al.(1998)은 터미널 관리자의 경험에 의존하던 복합 컨테이너 터미널의 운영 최적화를 위한 새로운 접근방안으로 시뮬레이션을 제시하였다. 이 연구에서 항만에 선박이 도착하기 전 이용 가능한 데이터로 선박도착 예정시간, 총 양하역 컨테이너 수, 터미널 야드 내 컨테이너 분배, 야드 내 수출·입 컨테이너 배치를 제시하였으며, 이 후 야드에서 선박까지의 운송 경로, 경로를 통해 이송 가능한 최대 컨테이너 수, 운송모드, 베이 플랜과 QC 작업일정 등의 데이터가 필요하다고 말하였다.
Yun et al.(1998)은 해상과 육상 수송 간 컨테이너의 효율적인 연계를 위한 컨테이너 터미널 운영절차 개선을 위해 시뮬레이션을 활용하였다. 해당 연구에서는 컨테이너 터미널의 계획을 9단계로 구분하여 컨테이너의 반출·입 시간 생성, 외부트럭 생성, TC작업목록 생성 및 재작성 등 7가지 계획데이터를 생성하였으며, 시설물의 경우 게이트, 컨테이너 장치장, 선석으로 구분하여 출·입구 수, 서비스 시간, 수출·입 블록 수, 블록당 베이 수 등 8가지 데이터를 입력데이터로 설정하였다. 또한, 장비의 경우 TC, CC, YT, 외부트럭으로 구분하여 속도, 작업시간, 장비대수를 입력데이터로 설정하였다.
Kia et al.(2002)는 컨테이너 터미널의 처리기술이나 하역능력과 관련하여 시뮬레이션 기술을 통한 현재와 제안안의 효율성 차이비교로 항만 개발안을 제안하였다. 해당연구에서는 선박의 항만 출입 수, 선석 수, 선석대기시간, 최소 혹은 최대 선석대기시간, SC와 FL 수, 터미널 점유율, 터미널 면적, 트럭이송 컨테이너 수, 기차의 하역능력 등의 데이터를 활용하였다.
Ha et al.(2004)은 이송장비의 작업생산성 평가를 위해 시뮬레이션을 활용하였다. 해당 연구는 AGV의 작업능력을 결정하기 위해 C/C 대수, AGV 운행대수, C/C의 대기시간, AGV 의 대기시간, C/C 작업에 투입된 AGV 안벽 대기수, C/C 작업에 투입된 AGV 안벽 대기 횟수를 평가함수로 활용하였으며, 기계적 작업능력으로 안벽길이, 블록베이수, 블록 열 수, 터미널 레이아웃, C/C 트롤리 속도, 작업소요시간, ATC 트롤리 속도, 주행 속도, 작업소요시간, AGV 최고속도, 회전속도를 활용하였다.
Jeon et al.(2007)은 항만의 효율적인 운영을 위한 장치장의 배치도 설계를 위해 시뮬레이션을 활용하였다. 이 연구에서 장치장 설계를 위해 활용된 데이터는 장치장 내 세로 방향 통로 폭, 장치장의 가로 길이, 장치장 외곽통록 길이, 1단위 컨테이너 소요 면적, 블록 열의 개수, 블록 행의 개수, 블록의 한 베이의 열의 수 등이 있다. 하지만 해당 연구는 수평배치에 활용되는 장치장의 데이터를 활용하였기에 수직배치된 장치장 에서 활용 시 제외될 요소가 존재할 것으로 판단된다.
Park and Park(2013)는 일반화물 항만하역능력의 수리적 모델이 현실을 반영하지 못하는 한계점을 보완하기 위해 시뮬 레이션을 활용하였다. 해당 연구에서는 일반화물 부두의 복잡성을 고려하여 안벽만을 대상으로 선박 도착시간 간격, 작업물량, 선석 수(길이), 작업일수 및 작업시간, 시간당 처리능력, 적정 점유율을 입력변수로 활용하였다.
Park and Kim(2016)는 최적의 항만 게이트 시스템을 구성 하기 위해 부산신항 터미널의 데이터를 활용한 시뮬레이션 모델을 개발하였다. 해당 연구에서 게이트 시스템의 최적화를 위해 트럭의 게이트 반출입 시간과 레인, 트럭의 반출입 컨테이너 수, 트럭의 반출입 컨테이너 종류, 트럭의 게이트 레인별 반출입 시간 등의 데이터를 활용하였다.
Wladimir and Fredrik(2019)는 성장하는 해상무역으로 인해 항만도로시설의 교통부하가 발생하고 있으며, 이에 따른차량 및 선적의 개선을 위한 해결책으로 IoT와 클라우드 기반의 항만트럭발송지원 디지털 트윈 컨셉을 제시하였다. 해당 연구에서 현재 날짜에 등록된 트럭의 정보, 다양한 트럭 유형에 대한 터미널 처리시간, 버퍼지역에서 터미널까지의 경로에 대한 교통 정보 등의 입력데이터와 외부 자료 사용가능 및 등록된 트럭에 대한 센서와 카메라를 활용한 실시간 센싱데이터가 필요하다고 강조하였다.
Janusz and Yorlandys(2019)는 겐트리크레인의 비효율성을 디지털 트윈 컨셉을 활용하여 최소화함으로써 컨테이너터미널의 크레인 운영효율성을 개선하고자 하였다. 해당 연구에서는 선박영역에서 연 컨테이너 터미널 입항선박 수, 선박 길이 및 적재능력, 각 선박의 양·하역 컨테이너 수, 출항 항만이 주요 매개변수로 설정하였다. 크레인 영역의 경우 시간당 크레인 움직임 수, 평균 고장 시간, 평균 수리 시간, 유지보수 시작시간, 내구성 유지 시간이 활용되었으며, 발전기 영역은 발전기 평균 고장 시간, 발전기 평균 수리 시간, 발전기 용량, 강제 사용 중단 확률이 활용되었다. 또한, 변압기 및 전송선 영역에서 발전기 평균 고장 시간, 발전기 평균 수리 시간 등을 활용하여 모델을 구성하였다.
Choi and Yu(2020)는 컨테이너 터미널을 대상으로 항만에 대한 단계적 디지털 트윈 기술 적용을 위한 우선 적용 분야를 도출하였다. 해당 연구에서는 디지털 트윈 기술 적용을 위한 분야를 크게 항만 장비 분야, 항만 시설 분야, 항만 운영 분야로 구분하였으며, 장기적인 관점에서 기술의 도입이 시급하다고 판단되는 ATC, 컨테이너 야드, CCTV 등에 디지털 트윈 기술의 우선 도입이 필요하다고 주장하였다.
Wang et al.(2021)는 디지털 트윈을 활용한 글로벌 스마트항만의 관리를 위해 항만 디지털 트윈 관리에 활용되는 핵심 기술과 관리 정보 시각화 및 결과 루프를 제시하였다. 스마트항만의 디지털 트윈에 필요한 시스템 프레임워크는 물리적 계층, 데이터 계층, 모델 계층, 서비스 계층, 적용 계층으로 구분하였으며, 화물 조작, 운송, 컨테이너 운영 등의 다양한 측면을 고려하였다. 해당 연구에서는 물리적 데이터, 숫자적 데이 터, 물리적 데이터와 숫자적 데이터를 활용하여 도출되는 혼합 데이터로 데이터 계층을 구분하였으며, 구분된 데이터에 대한 추가적인 연구가 필요하다고 강조하였다.
2.2.2.2 항만 디지털 트윈 개발 사례
항만과 관련된 데이터를 수집하여 디지털 트윈 기반의 항만 효율성을 개선하고자 하는 항만사례가 점차 증가하고 있다. 싱가포르는 싱가포르 국립대학교(NUS)와 싱가포르 해양 연구소(SMI)의 협업사업인 차세대 항만을 위한 시뮬레이션 모델링 센터 C4NGP를 설립하고, 2018년 ZPMC, PSA Marine 등 7개 기관과 MOU를 체결하여 2025년까지 디지털 트윈 기술을 공동 개발하기로 하였다. C4NGP의 목표는 AI와 시뮬레이션의 상호 학습효과를 통한 항구 운영의 물리적/디지털적측면의 완전한 통합을 주요 과제로 인력 영역 계획 및 최적화, 근무 패턴 계획 및 최적화, 공간 활용률 제고 등 6가지 방면에서 항만 효율성을 개선하는 것이다. C4NGP는 항만 디지털 트윈을 가속화하고 글로벌 해양운영을 통합하기 위해 2019년 12개의 글로벌 산업 및 연구 파트너와 얼라이언스를 체결하고 PortML이라는 항만 디지털 트윈 개발의 표준 프로그래밍 언어를 개발하고 있으며, 2024년 12월까지 국제표준으로 채택되고자 단계별로 노력하고 있다. 또한, PortML 언어를 활용한 항만 디지털 트윈 시뮬레이션 소프트웨어인 SINGAPORT Studio를 개발하여 Tuas 항의 해상, 육상 교통 시뮬레이션, 싱글 핑거 디지털 트윈 등의 확장성, 항만의 시스템 및 터미널의 레벨별 데이터를 기반으로 한 사실성, 그리고 각종 데이터를 활용하여 항만 효율성을 제고하고 있다.
로테르담항은 항만공사의 주도하에 2030년까지 자율운항선박의 출입을 목표로 IBM, Cisco, Axians 등 유수의 기업들과 협력하여 디지털 트윈을 추진하고 있다. 디지털 트윈이 이루어지는 범위는 로테르담시에서 북해에 이르는 42km 항만 전체에 IoT 및 클라우드 기술을 바탕으로 디지털 트윈화가 이루어질 예정이며, 현재는 우선적으로 부두 및 돌핀에 IoT 센서를 부착하여 기온, 풍속, 상대 습도, 탁도, 염도 등 터미널과 관련된 정보를 수집하고 있다. 또한, 스마트 컨테이너인 컨테이너 42를 활용하여 컨테이너의 내·외부 온도, 위치, 충격 및 가속 등 다양한 데이터를 수집하고 있다. 로테르담항은 추후부두, 차량, 건물, 하역장비 등 수천 개의 인프라 시설과 장비에 IoT 센서를 부착하여 정보 연계를 진행하여 향후 항만의 정보를 수집할 수 있는 체계를 구축할 예정이며, AR 기반의 구글 글라스 접목을 통한 주변 사물에 대한 직접적인 현황정보 및 위치, 장비 소프트웨어, 고장 여부 등 정보 제공을 통한 항만작업 시 안전성을 강화하고 있다. 또한, 항만 내의 프로세스 최적화를 위한 디지털 앱인 프론토(PRONTO)를 활용하여 이용자들 간 물류 연계성을 향상시키고 있으며, 선박 관련 항행 정보와 파고, 풍향 등 해상 기상정보 등을 분석하여 선박의 승선 및 출항시간을 사전에 계획하고자 노력하고 있다.
중국 선전항의 마완항만은 화웨이, 텐센트, 알리바바 등 중국 유수의 인터넷 기업들과 손잡과 항만 중심의 스마트 생태계를 조성하고 있다. CMP(China Merchants Ports)의 주도하에 추진되고 있는 Mawan Smart Port 프로젝트는 5G 커뮤니케이션 기술, IoT, 빅데이터, 인공지능 등의 4차 산업혁명 기술들을 기반으로 항만 코어기술과 서비스를 구성하는 프로젝트로 항만과 배후단지 그리고 도시가 함께 성장하는 모델을 채택하였으며, 인간의 간섭이 필요 없는 완전자율 스마트 항만으로 개발하고자 노력하고 있다. 또한, 마완항은 베이더우 시스템, 디지털 트윈 등 다양한 기술을 기반으로 한 아날로그시뮬레이션 생성 항만생산관리시스템을 개발하여 마완항의 생산성을 최적화하려고 한다. 실제 마완항의 디지털 트윈을 담당하고 있는 51 WORLD Digtal Twin Technology는 AES 플랫폼을 통해 항만의 실제 지형 및 환경 특징을 추출하고 무인항공기와 센서를 활용하여 컨테이너 모형을 생성하고 있으며, 다양한 4차 산업기술을 활용하여 항만 운영프로세스에 대한 시각적 시뮬레이션을 수행하는 기술을 개발하고 있다.
독일의 함부르크 항만은 항만공사의 주도하에 자신들의 디지털 트윈 모델에 5G 기술을 성공적으로 통합시키고 있다. HPA가 추진하고 있는 5G-MoNarch 프로젝트는 함부르크 항을 테스트베드로 5G 기반의 스마트 항만을 구축하는 프로젝트로 함부르크 항구 지역 내 다양한 산업 사용 사례 및 요구 사항을 해결하기 위해 URLLC(Ultra-Reliable Low Latency Communication)를 활용한 교통체계 개선, eMBB(Enhanced Mobile Broadband)를 활용한 항만 운영을 포함한 자산 유지및 수리, MMTC(Massive Machine Type Communication)을 활용한 항만환경데이터 측정을 전개하고 있다. 이러한 5G 네트워크 전개를 통해 수집된 데이터를 바탕으로 함부르크 항의 인근지역을 포함한 디지털 트윈 구축을 통해 높은 경제적 이익과 환경적으로 긍정적인 피드백을 받고 있다.
이탈리아의 리보르노 항만은 2016년부터 에릭슨과 함께 5G 네트워크, AI 기반의 디지털 트윈 기술을 적용하고 있다. 리보르노 항만은 카메라, 센서, 라이다 등을 통해 수집된 데이터를 바탕으로 항만을 영역별로 디지털 트윈화 하였으며, 카메라를 통해 컨테이너, 차량 등의 움직임에 대한 일련의 프로세스를 디지털화한다. 또한, WDR 카메라를 활용하여 어떤 경우에도 최상의 운영 시나리오를 도출할 수 있도록 하고 있으며, VR기술 접목을 통해 보관공간에 배치된 화물에 대한 무게, 부피, 이름, 구성품 등 화물 정보를 디지털 트윈 공간에서 확인할 수 있도록 하여 터미널 운영자의 안전성을 향상시키고자 하고 있다.
우리나라의 부산항 역시 항만 디지털 트윈 구축을 위해 노력하고 있다. 해양수산부는 2017년 4차 산업혁명 종합대책을 수립하고, 스마트 IoT 센서 및 기술을 항만 현장에 적용하기 위해 2019년부터 3년간 BPT 터미널을 대상으로 IoT 기반 지능형 항만물류 기술개발을 추진하고 있다. 또한, 부산항만공사는 BPA-NET(현 CHAINPORTAL)을 기반으로 한 빅데이터 시스템을 운영하고 있으며, 선박입·출항 및 컨테이너 터미널 생산성 최적화 서비스를 제공하기 위해 디지털 트윈 도입을 추진하고 있으며, 2021년 5월 부산항 운영 최적화 및 효율성 제고를 위한 실증사업을 추진하고 있다. 부산항만공사는 디지털 트윈 기술을 통해 선박의 위치정보에 따른 사전 작업계획, 생산성 제고, 교통정보와의 연계를 통한 최적 이동 경로 등 운영 효율성 극대화가 가능할 것이라 기대하고 있다.
3. 연구설계
3.1 설문지 구성
선행연구와 항만 적용사례를 기반으로 컨테이너 항만의 디지털 트윈 적용을 위한 데이터 핵심요소를 구성한 결과 Q/C, T/C, Y/T 등 항만의 장비와 관련한 데이터, 연평균 컨테이너 터미널 입항선박 수, 선박 입출항 예정시간, 시간당 Q/C 움직임 수, 작업 리드타임 등의 항만 운영과정에서 발생하는 데이터 그리고 해양 지형정보, 해양 기상정보, 안벽 제원, 장치장 제원 등의 항만의 지리적인 데이터를 기반으로 항만 시뮬레이 션과 디지털 트윈을 구축하고 있는 것으로 나타났다.
항만 디지털 트윈의 구축을 위한 모델의 연결성과 세분성을 갖추기 위해서는 위의 항목을 좀 더 세세하게 구분할 필요가 있으며, 이를 위해 본 연구에서는 데이터 요소를 Wang et al(2021)의 물리적 데이터, 혼합 데이터, 숫자적 데이터로 구분하여 항만 디지털 프레임워크의 데이터 계층을 구성한 것과 HPA(2021)의 항만 이력데이터, 항만 인프라 데이터, 항만 지리적 데이터 등이 중요하다고 강조한 문헌을 참고하여 데이터를 물리적 데이터, 지리적 데이터, 운영적 데이터로 구분하였 다. 물리적 데이터는 항만 프로세스상에 존재하는 컨테이너, 선박, 크레인, 운송장비 등의 물리적 장비와 관련된 데이터이며, 지리적 데이터는 항만 인근 지역의 시설, 환경, 도로, 도시 등의 지정학적 특징과 관련된 데이터이다. 운영적 데이터는 항만 프로세스에서 발생하는 실시간 데이터, 러닝 데이터, 예측 데이터 등 항만의 운영과 관련된 데이터이다.
이렇게 구분된 요인에 포함될 설문요소는 선행연구와 항만 적용사례에 중복되는 항목과 비슷한 의미의 항목을 세분성을고려하여 통합하였다. 그 결과 물리적 데이터는 컨테이너 제원 및 수량정보, 입·출항선박 제원을 포함한 총 12가지 요소로 구성하였으며, 지리적 데이터는 해양 기상정보(조류, 파고, 풍향, 풍속 등), 안벽 제원(수심, 안벽길이, 선석 수 등)을 포함한 총 6가지 요소로 구성하였다. 또한, 운영적 데이터는 선박 정보(입·출항 예정시간, 연 평균 입항 수 등), 안벽 및 에이프런 상태정보(대기 선박 수, 선박 대기시간 등)을 포함한 총 11가지 요소로 구성하였다.
본 연구의 설문지는 응답자의 답변 편의와 설문지 회수의 용이성을 위해 Likert 5점 척도로 구성하였으며, 연구에 활용될 설문지의 세부문항은 다음 Table 3과 같다.
3.2 설문 일반현황
3.2.1 자료의 수집
본 연구는 항만에서 활용되고 있는 측정 가능한 데이터에 대한 조사가 목적으로 실제 항만에서 수집되고 있는 항만 데이터에 대한 지식이 필요하다. 따라서, 조사 대상은 항만 관련 업무종사자를 대상으로 설문조사를 실시하였으며, 직접적인 방문이나 COVID-19로 인한 직접적인 방문이 어려울 경우 온라인 및 E-mail을 통해 설문을 배포하였다. 조사기간은 2021 년 10월 4일부터 2021년 11월 03일 금요일까지 총 5주간 설문을 진행하였으며, 총 97부의 설문지를 회수하였다. 회수된 설문지 중 응답자가 동일한 2부와 대답이 불성실한 8부를 제외한 총 87부의 설문지를 최종적으로 분석에 활용하였다.
3.2.2 일반현황
응답자의 연령별 현황을 분석한 결과 40대 응답자가 40.2%(35명)로 가장 많은 것으로 나타났으며, 50대 이상의 응답자가 9.2%(8명)로 가장 낮은 것으로 나타났다. 응답자의 경력의 경우 대부분 비슷한 것으로 나타났으며, 항만과 관련한 분야에 오랫동안 종사하여 노하우가 갖춰졌다고 볼 수 있는 11년 이상의 경력자가 48.3%(42명)로 나타났다.
4. 실증분석
4.1 분석 개요
본 연구에 활용된 설문요소는 아직 논리적으로 체계화 되어있지 않은 항만에서 측정 가능할 것이라 판단되는 데이터이다. 따라서 탐색적 요인분석을 통해 자료의 타당성을 확보하고 각 요소를 요인에 적합하게 재구분할 필요가 있으며, 확인적 요인분석을 통해 이를 검증할 필요가 있다.
탐색적 요인분석은 기존 연구모형에 대한 이론적 구성 및 사전 지식이 없는 상황에서 요인 및 개념을 추출하는 분석으로 무작위로 나열된 요소 간의 상관관계를 확인하여 요인으로 묶어준다. 연구자는 이를 활용하여 연구 방향을 체계화할 수있다.
확인적 요인분석은 탐색적 요인분석을 통해 확인한 요인 수, 요소와의 관계 등이 실제 얼마만큼의 관련성을 갖는지를 확인하는데 사용한다. 확인적 요인분석 시 각 요소와의 인과 관계를 찾고 설명하기 위해 공분산 구조방정식 모형을 통해 검증하였다. 본 연구는 구조방정식은 적합도를 측정하기 위해 증분적합지수인 TLI, CFI와 절대적합지수인 RMSEA를 활용하였다. TLI는 제안모델과 대안모델의 비교를 위해 모델의 간명도를 결합하여 측정하는 것으로 0.9 이상 시 양호하며, CFI 는 모집단의 모수 및 분포를 표시하는 값으로 0.9 이상 시 양호하다. 또한, RMSEA는 Chi-squerare의 통계량 한계를 극복하기 위해 개발된 지수로 0.10 이하 수준일 때 수용 가능하다 (Hong, 2000).
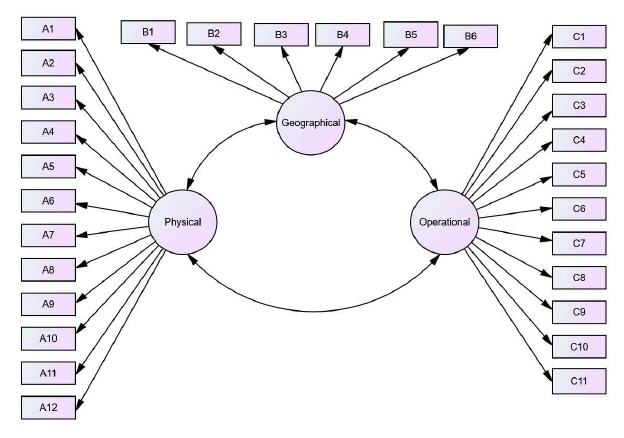
본 연구의 요인 간의 상관관계를 선형 구조방정식 모형으로 개념화하여 도식화한 설명은 다음 Fig 6과 같다.
4.2 탐색적 요인분석 및 확인적 요인분석
4.2.1 탐색적 요인분석
본 연구는 항만 디지털 트윈을 위한 데이터 요소에 대한 탐색적 요인분석을 수행하기 위해 변수들이 공통으로 포함하고 있는 목적을 중심으로 자료를 축소하는 최대우도법을 요인추출방식으로 선정하였으며, 고유값은 1이상을 수렴을 위한 최대 반복수는 총 50회로 하였다. 또한, 항만의 데이터는 상호 간에 유의한 상관관계가 있다고 판단하여 회전방식으로는 사각(oblique)회전 방식 중 직접 오블리민 방식을 시행하였다. 또한, KMO(Kasier-Meyer-Olkin) 척도와 Bartlett의 구형성 검정을 통해 수집된 표본이 요인분석에 적합한지를 검증하였다. KMO는 일반적으로 0.5 이상을 요인분석을 수행하기에 적합한 자료라 할 수 있으며, Bartlett 구형성 검정은 유의확률이 0.05 이하일 경우 요인분석에 활용할 충분한 상관관계가 있다고 판단할 수 있다(Kim, 2013). 공통성 값(Communality)은 각 변수의 분산이 요인들에 의해 설명되는 정도를 뜻하며, 0.3 이상이면 다소 좋음, 0.4 이상이면 좋음, 0.5 이상이면 매우 좋은변수라 할 수 있다(Crocker and Algina, 1986). 최근 공통성값은 0.4를 기준으로 선택되는 경우가 많아 본 연구 역시 0.4 를 기준으로 분석을 실시하였다. 설명된 총 분산값은 초기 고유값을 확인하여 1 이상일 시 요인으로서 적합하다 볼 수 있으며, 추출 제곱합 적재량의 누적 적재량은 0.6 이상일 시 요인분석이 잘되고 있는 것으로 볼 수 있다. 마지막으로 패턴행렬은 각 요소들이 어느 요인에 속해있는지를 나타낸다. 패턴 행렬의 요인적재 값은 절대값이 0.3∼0.5 정도를 기준으로 활용하며, 본 연구에서는 0.4를 기준으로 활용하였다.
탐색적 요인분석은 총 2차에 걸쳐 진행하였다. 1차 탐색적 요인분석에서 공통성 값이 0.4미만으로 낮게 나타난 B1, C9을 제거하였으며, 패턴행렬에서 요인적재 값 0.4 미만으로 낮은 A6, C6 항목과 제거 시 Cronbach 계수가 유의미하게 상승하는 항목인 C7를 제거하고 재분석을 실시하엿다.
2차 탐색적 요인분석 결과 KMO값이 0.859, Bartlett값 0.000으로 탐색적 요인분석이 적합하다고 나타났으며, 모든 요소가 공통성이 0.4 이상으로 충분한 설명력을 갖추고 있다고 나타났다. 또한, 요인은 1차에서 나타난 5개 요인에서 1개 요인이 축소된 4개 요인으로 총 66.6%의 설명력을 가지고 있다고 분석되었다. 패턴행렬을 분석한 결과 모든 요인에서 Cronbach 계수가 0.6 이상으로 나타났으며, 설명력이 0.4 미만으로 나타난 A3 항목의 경우 타 항목과의 공통성이 있고 연구자가 필요한 것으로 판단하여 제거하지 않은 상태로 탐색적 요인분석을 마무리하였다.
최종적으로 24개 변수를 4개 요인으로 분류하였으며, 각 요인에 대한 상관관계를 고려한 요인명칭은 다음과 같다.
요인 1은 Q/C 호이스트 속도 및 가속도(A4), Q/C 트롤리속도 및 가속도(A5), T/C 이동속도, 가속, 감속(A7), T/C 트롤리 이동 속도, 가속, 감속(A8), T/C 호이스트 속도, 가속, 감속(A9)로 요인이 구성되었으며, 크레인과 관련된 데이터 내용을 포함하였기에 크레인 데이터로 명명하였다.
요인 2는 선박 정보(C1), 안벽 및 에이프런 상태정보(C2), 하역장비 운영정보(C3), 운송장비 운영정보(C4), 야드 정보 (C5), 컨테이너 제원 및 수량정보(A1), 입·출항선박 제원(A2)로 요인이 구성되었으며, 이는 항만 프로세스에서 발생하는 항만의 운영과 관련된 데이터와 관련된 내용을 포함하였기에 운영적 데이터로 명명하였다.
요인 3은 Q/C 제원 및 수량정보(A3), R/S 제원 및 수량정보(A10), Y/T 제원 및 수량정보(A11), AGV 제원 및 수량정보(A12), 안벽 제원(B2), 장치장 제원(B3), 게이트 제원(B5)로 요인이 구성되었으며, 항만에 존재하는 장비 및 인프라 등의 물리적 데이터와 관련된 내용을 포함하였기에 물리적 데이터로 명명하였다.
요인 4은 항만도로 제원(B4), 항만 인근 지리정보(B6), 항만 도로 정보(C8), 게이트 정보(C10), 트럭 정보(C11)로 요인이 구성되었으며, 항만 및 인근 지역의 운송과 관련된 내용을 포함하였기에 운송 데이터로 명명하였다.
최종 정리된 4개 요인을 바탕으로 확인적 요인분석 시 변수의 이름을 간편화하기 위해 요인 1의 변수를 크레인, 요인 2의 변수를 운영, 요인 3의 변수를 물리, 요인 4의 변수를 운송으로 아래의 Table 6와 같이 정리하였다.
4.2.2 확인적 요인분석
탐색적 요인분석을 통해 도출된 크레인 데이터, 운영적 데이터, 물리적 데이터, 운송 데이터 등 총 4개 요인을 구성하였다. 또한, 탐색적 요인을 통해 도출된 요인들이 제대로 구성되었는지와 요인들 간 관련성을 설명하기 위해 확인적 요인분석을 실시하였다. 확인적 요인분석은 상관관계를 기준으로 개념적 측정의 타당성 검증이 필요하며, 집중타당성과 판별타당성 확보가 필요하다.
집중타당성을 증명하기 위해서는 비표준화 λ(람다)값의 C.R. 값이 1.96 이상으로 도출되어야하며, P값은 0.05 미만이여야 한다. 또한, 표준화 λ값은 최소 0.5 이상이어야 하며 0.7 이상이 바람직하다. 또한, 평균분산추출값(이하 AVE) 0.5 이상 개념신뢰도(이하 C.R.)는 0.7 이상으로 나타나야 한다.
판별타당성을 증명하기 위해서는 AVE 값이 상관계수의 제곱을 초과해야하며, 상관계수±2*표준오차 범위에 1이 포함되지 않아야 한다.
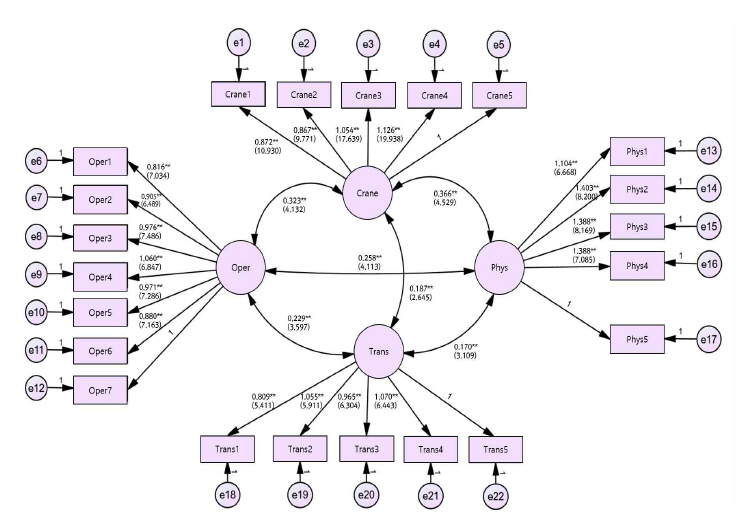
외생변수의 확인적 요인분석 결과 모든 요소의 P값이 0.05 미만으로 나타났으며, C.R. 값이 1.96 이상으로 나타났다. 하지만 물리5, 7의 표준화 계수의 값이 0.7 미만으로 나타나 이를 제거하고 재분석을 실시하였다. 재분석을 실시한 결과, 운송1과 운영7의 표준화 계수값이 0.7 미만으로 나타났으나, 0.6 은 초과하고 포함이 필요하다 판단되어 제거하지 않고 분석을 진행하였다. 집중타당성 검증을 위한 AVE값 역시 모든 요인 에서 0.5 이상으로 나타났으며, C.R. 값도 0.7 이상으로 분석되어 확인적 요인분석의 집중타당성이 있다고 할 수 있다.
확인적 요인분석의 판별타당성 분석 결과 모든 요인항목에서 상관계수 제곱의 크기가 AVE보다 낮게 나타났으며, 상관계수 ±2*표준오차에 1이 포함되는 요인 역시 없는 것으로 나타나 판별타당성이 있다고 할 수 있다.
통합된 모형의 추정을 위해 공변량 구조분석에서 일반적으로 사용되는 최대우도법(maximum likelihood method)를 사용하였다. 최대우도법은 P개의 모든 변수들이 다변량 정규분포를 따른다고 가정하여 요인의 적재치를 계산하는 방법으로 특정적합함수를 최소화하기 위한 모수추정을 개선하는 것으로 일치성과 충분성을 가지는 특성이 있다. 또한, 분포를 다변량정규분포로 가정하였기에 적합한 요인의 수를 결정하는 데 통계적인 검정도 할 수 있다. 또한, 모형의 적합도지수는 절대적 합지수인 카이자승 통계량(χ2), RMSEA와 증분적합지수인 TLI, CFI를 활용하여 적합도를 확인하였다.
연구모형의 적합도 검증결과 카이자승 통계량(χ2)은 469.723, 자유도(df)=203, p=0.000으로 p>0.05를 충족하지 못하므로 적합도가 떨어진다. 하지만 선행연구에 의하면 P값의 경우 표본의 크기가 클수록 유의확률이 0.05를 넘지 못하는 경우가 많으며, 이는 연구모형 분석에 영향을 주지 않는다고 말하고 있다(You, 2020). 또한, 증분적합지수는 CFI=0.841, TLI=0.819이며, 절대적합지수인 RMSEA=0.124로 적합도가 낮게 나타나 수정지수(MI: Modification Index)를 통하여 적합도를 높일 필요가 있다. 이에 수정지수의 적용은 적어도 5 이상(Joreskon & Sorbom, 1993)이 필요하다는 선행연구를 기반으로 5로 설정하여 분석한 결과 χ2 통계량은 347.348로 낮춰지고 CFI는 0.9 이상 TLI는 0.9 이하지만 충분한 적합도가 있으며, RESEA는 0.1 이하로 나타났다.
5. 결 론
5.1 연구결과 요약
항만은 국제무역에서 빼놓을 수 없는 요소이며, 최근 COVID-19, 미·중 무역분쟁 등으로 인해 대두되고 있는 GSCM에서 물품의 운송, 보관, 부가가치 창출 등 다양한 역할을 수행할 수 있는 중요한 시설이다. 다양한 4차 산업혁명 기술들로 인해 전 산업의 효율성과 경쟁력 제고되고, 새로운 트렌드가 제시되고 있는 시점에서 항만 역시 4차 산업혁명 기술을 적용한 시대의 흐름에 편승하여 이를 적용해나가고 있다. 특히, 항만의 오랜 골칫거리라 할 수 있는 항만의 안전성 문제와 터미널 효율성 제고 문제를 해결하기 위해 많은 연구가 진행되고 있으며, 컨테이너 항만의 디지털 트윈이 실현될 경우이러한 항만의 골칫거리 해결에 큰 도움이 될 것으로 판단된다. 하지만 항만은 프로세스별로 다양한 데이터가 발생함은물론이고, 항만과 배후지역과의 연계성을 중요시하는 최근 항만 트렌드를 고려하였을 때, 디지털 트윈 기술의 적용을 위한 세부적인 데이터 요소 도출의 범위는 더욱 넓어진다고 할 수있다. 이에 본 연구는 컨테이너 항만에서 발생하는 세부적인 데이터를 조사하고, 탐색적·확인적 요인분석을 통해 항만에서 발생하는 측정 가능한 세부 데이터를 요인화하고자 하였다.
총 87부의 설문을 토대로 탐색적 요인분석을 실시한 결과 크레인 요인, 운영적 요인, 물리적 요인, 운송적 요인과 같이 4 개 요인 24개 요소를 도출하였으며, 이를 기반으로 확인적 요인분석 결과 표준화 계수가 0.7 미만으로 나타난 안벽 제원, 게이트 제원을 제외한 나머지 요인의 결과값은 유의하다고 나타났다.
본 연구를 통한 결론은 다음과 같다.
첫째, 크레인 데이터에 Q/C 호이스트 속도 및 가속도, Q/C 트롤리 속도 및 가속도, T/C 이동 속도, 가속, 감속, T/C 트롤리 이동 속도, 가속, 감속, T/C 호이스트 이동 속도, 가속, 감속 요소가 포함되는 것을 확인하였다. 디지털 트윈을 적용하기 위해서는 세세한 데이터가 필요하다. 특히, 크레인에서 세밀한 작업을 수행하는 호이스트 및 트롤리의 작업속도를 결정하는 이동 속도, 가속, 감속 등의 데이터가 중요하다고 판단되어 진다. 또한, 현황 조사에 따르면 항만 장비 정보에 대한 데이터 수집이 활발하게 이뤄지고 있는 축에 속한다. 하지만 우리나라의 경우 대부분의 크레인이 중국 Z사의 물품으로 각 부품이나 안전성 재고를 위한 전체적인 크레인에 대한 데이터를 얻기 어려운 측면이 있다. 크레인에 대한 디지털 트윈화를 위해서는 Z사와의 협력을 통한 데이터 획득이나 자체적인 크레인 개발이 필요할 것으로 보인다.
둘째, 운영적 데이터에 선박 정보, 안벽 및 에이프런 상태정보, 하역장비 운영정보, 운송장비 운영정보, 야드 정보, 컨테이너 제원 및 수량정보, 입·출항선박 제원이 포함되는 것을 확인하였다. 운영적 데이터는 항만 프로세스 전반에 걸쳐 발생하는 데이터이기에 원활한 디지털 트윈의 적용을 위해서는 우선적으로 측정되어야 할 데이터이다. 특히, 야드 정보, 하역장비정보 등은 여러 선행연구를 통해 생산성 증가에 영향을 준다는 것을 터미널 관계자들 역시 알고 있으며, 일반현황의 데이터 수준을 살펴보았을 때 역시 수집수준이 높은 축으로 보이고 있다. 하지만 항만 부가시설에 대한 정보의 수집수준은 낮은 축으로 이에 대한 개선이 필요할 것으로 보이며, 우리나라의 대표적인 항만인 부산항의 경우 다수의 운영사가 항만을 운영하고 있기에 측정하기 어려운 데이터가 존재할 것으로 판단된다. 이에 항만을 운영하는 운영사 간 데이터 공유센터 설립이나 혹은 운영적 통합을 통해 항만 디지털 트윈을 위한 높은 수준의 운영적 데이터 수준을 구축하는 것이 필요할 것으로 보인다.
셋째, 물리적 데이터에 Q/C 제원 및 수량정보, R/S 제원 및 수량정보, Y/T 제원 및 수량정보, AGV 제원 및 수량정보, 장치장 제원 요소가 포함되는 것을 확인하였다. 디지털 트윈을 위해서는 항만의 장비가 몇 대가 존재하며, 항만이 보유하고 있는 인프라가 어느 정도 크기의 면적으로 확보되어 있는지 정확한 제원을 알아야 완벽한 가상세계를 구축할 수 있다. 물리적 데이터의 경우 항만의 직접적인 자산과 관련되어 있어 이에 대한 데이터 수집수준은 높을 것으로 판단되어 가상세계를 구축하는 데 비교적 용이할 것으로 보인다. 다만 추가적인 항만 인프라 건설이나 장비 교체 시, 혹은 운영사 간 협력체계 구축을 통해 가용할 수 있는 항만의 물리적 제원이 변경될 수 있으며, 이러한 변화에 대한 데이터의 업데이트가 실시간으로 수집될 수 있도록 신경을 쓰는 것이 중요하다고 판단된다.
넷째, 운송 데이터에 항만도로 제원, 항만 인근 지리정보, 항만도로 정보, 게이트 정보, 트럭 정보항만도로 정보가 포함되는 것을 확인하였다. 운송 데이터는 항만 내·외부의 컨테이너 운송의 효율성 증진을 위한 것으로 디지털 트윈을 통한 항만 계획을 세울 때 필수적인 요소라 할 수 있다. 하지만 현재 운송데이터와 관련하여 항만의 데이터 수집수준은 낮은 축이다. 또한, 현재의 항만은 내부에만 국한된 것이 아닌 외부와의 연결성을 중요시하고 있어, 항만 인근지역의 지리정보나 교통 정보 역시 측정 가능한 데이터화가 필요할 것으로 판단된다. 특히, 현재 선박과 관련한 중요 쟁점 중 하나인 자율운항선박의 연구가 심화되고 있음에 따라, 해상운송구간에서 발생하는 선박의 데이터 역시 컨테이너 항만의 디지털 트윈을 위한 핵심적인 데이터가 될 것이라 판단된다.
5.2 연구의 한계점 및 향후 연구방향
본 연구는 디지털 트윈 기술의 컨테이너 항만 적용을 위해 선행연구와 실제 항만에서 적용하고 있는 사례를 바탕으로 세세한 요소를 도출하고 이를 측정에 활용되는 요인화하는데 의의가 있다. 하지만 위의 결과에도 불구하고 아래와 같은 한계점으로 인해 향후 발전된 연구가 필요할 것으로 보인다.
첫째, 항만의 프로세스에서 벌어지는 모든 데이터를 목록화하지 못했다. 디지털 트윈은 현실세계와 똑같은 가상세계에서 시뮬레이션을 통한 효율성 증진을 위한 기술이기에 데이터의 세분성을 필요로 한다. 따라서 항만 프로세스별 데이터를 좀 더 세분화하여 조사하는 것이 필요하다.
둘째, 전체적인 설문 조사의 표본 수가 부족하다. 본 연구에서 활용된 설문 조사의 표본은 변수의 2배 수준(Guilford, 1956)으로 유의하긴 하지만, 현재 권장되는 3~5배 수준이나 200부 수준에는 모자란다(Thorndike, 1992). 따라서 더 많은 표본을 바탕으로 한 분석이 필요할 것으로 판단된다.
셋째, 설문조사의 표본이 항만 터미널의 실무자들에게 집중되어 있다. 디지털 트윈 기술의 컨테이너 항만 적용을 위해서는 현장에서 업무에 종사하고 있는 실무자들의 의견도 중요하지만, 데이터를 기반으로 프레임을 구성하고 항만의 각 영역에서 어떠한 데이터가 활용되는지에 대해 연구를 진행하고 있는 연구 종사자의 의견도 중요하다. 따라서 추후 연구를 진행 할때에는 연구 종사자의 의견을 반영하는 것도 필요할 것으로 판단된다.

 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






