

1. ņä£ ļĪĀ
ņłśņżæ ņØīĒ¢ź ĒåĄņŗĀņØĆ ĻĄ░ņé¼ņĀü ļ¬®ņĀüņØä ņ£äĒĢ┤ ņĀ£ĒĢ£ņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉś ņ¢┤ņĪīņ£╝ļéś, ņłśņżæ ĒāÉņ¦Ć, ņÜ┤ļÅÖņ▓┤ ņČöņĀü, ņ×ĀņłśĒĢ©, ļČĆņØ┤ļź╝ ņØ┤ņÜ®ĒĢ£ ĒĢ┤ ņ¢æņØś ļéĀņö© ļ│ĆĒÖö ļō▒ ĒĢ┤ņ¢æņŚÉņä£ņØś ĒåĄņŗĀņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼Ļ░Ć ĒÖ£ļ░£Ē׳ ņØ┤ ļŻ©ņ¢┤ņ¦Ćļ®░ ĒÖ£ņÜ® ļČäņĢ╝Ļ░Ć ĒÖĢļīĆļÉśĻ│Ā ņ׳ļŖö ņČöņäĖņØ┤ļŗż. ņłśņżæĒåĄņŗĀņŚÉņä£ ņĀäĒīīļŖö ĻĖēĻ▓®ĒĢ£ Ļ░ÉņćĀĒŖ╣ņä▒ņØä Ļ░Ćņ¦ĆĻĖ░ ļĢīļ¼ĖņŚÉ ņłśņżæņŚÉņä£ņØś ļ¼┤ņäĀĒåĄ ņŗĀņŚÉļŖö ņØīĒīīļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĒåĄņŗĀņØä ĒĢśĻ▓ī ļÉ£ļŗż. ĻĘĖļ¤¼ļéś ņłśņżæņŚÉņä£ ļŖö ĒĢ┤ņ¢æ ņāüĒā£(sea state), ņś©ļÅä, ņŚ╝ļČäļÅä, ņłśņŗ¼ ļō▒ņØś ļŗżņ¢æĒĢ£ ĒÖśĻ▓Į ņÜöņåīņŚÉ ļö░ļØ╝ ņØīĒīīņØś ņĀäļŗ¼ņØ┤ ņĀ£ĒĢ£ļÉśĻ│Ā ņ£Īņāü ĒåĄņŗĀņŚÉ ļ╣äĒĢ┤ ņāüļīĆ ņĀüņ£╝ļĪ£ ņĀĆņŻ╝Ēīī ļīĆņŚŁņØä ņé¼ņÜ®ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ļīĆņŚŁĒÅŁņØ┤ Ēü¼Ļ▓ī ņżäņ¢┤ļōż ņ¢┤ ņłśņżæņØīĒ¢źĒåĄņŗĀ ņŗ£ņŖżĒģ£ņØś ņä▒ļŖź ņŚŁņŗ£ ņĀ£ĒĢ£ņĀüņØ╝ ņłśļ░¢ņŚÉ ņŚåļŗż.
ņØ┤ļ¤¼ĒĢ£ ņØīĒ¢ź ņ▒äļäÉ ĒŖ╣ņä▒ņØś ņŗ£Ļ│ĄĻ░äņĀüņØĖ ļ│ĆĒÖöļŖö ļööņ¦ĆĒäĖ ņłśņżæ ņØīĒ¢ź ĒåĄņŗĀņŚÉņä£ ņåĪņŗĀĒĢśļŖö ņŗ¼ļ▓īĻ░äņØś ņāüĒśĖĻ░äņäŁ(Inter-Symbol Interference : ISI)ņØä ņĢ╝ĻĖ░ĒĢśņŚ¼ ĒåĄņŗĀ ņŗ£ņŖżĒģ£ņØś ņä▒ļŖźņØä ņĀĆĒĢśņŗ£ ĒéżĻ▓ī ļÉ£ļŗż. ļö░ļØ╝ņä£ ņØ┤ļ¤¼ĒĢ£ ļ╣äņäĀĒśĢ ļ│ĄĒĢ® ņ▒äļäÉņØä Ļ░Ćņ¦ĆļŖö ņłśņżæĒåĄ ņŗĀņŚÉņä£, ņŗ£Ļ░äņŚÉ ļö░ļØ╝ ņ▒äļäÉņØś ĒŖ╣ņä▒ņØ┤ ļ¦żņÜ░ ļ╣Āļź┤Ļ▓ī ļ│ĆĒĢśļŖö ņŗ£ļ│Ć ĒŖ╣ņä▒ņØä Ļ░Ćņ¦ĆļŖö ņ▒äļäÉņØ┤ļ»ĆļĪ£, ņØ┤ļź╝ ņŗĀļó░ņä▒ņØ┤ ņ׳Ļ│Ā ņś¼ļ░öļź┤Ļ▓ī ļ│Ą ņĪ░ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņŚ¼ļ¤¼ ĒŖ╣ņä▒ņØä Ļ│ĀļĀżĒĢ£ ņ▒äļäÉ ļČĆĒśĖĒÖö ļ░®ņŗØĻ│╝ ņĀü ņØæ ļō▒ĒÖöĻĖ░ņØś ĻĖ░ņłĀņØ┤ ļ¦żņÜ░ ņżæņÜöĒĢśļŗż(Kilfoy D.B, et al, 2000).
ņØ┤ņŚÉ ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ļŗżņżæ Ļ▓ĮļĪ£ ĒÖśĻ▓ĮņŚÉņä£ ņøÉĒÖ£ĒĢ£ ĒåĄņŗĀĻ│╝ ĒĢ© Ļ╗ś ņłśņŗĀ ņŗĀĒśĖņØś ņä▒ļŖźņØä Ē¢źņāüņŗ£ĒéżĻĖ░ ņ£äĒĢśņŚ¼ ļé«ņØĆ SNRņŚÉņä£ ņÜ░ ņłśĒĢ£ ņä▒ļŖźņØä ļ│┤ņØ┤ļŖö BCJR ļ│ĄĒśĖĻĖ░ņÖĆ ļŗżņżæ Ļ▓ĮļĪ£ļĪ£ ņØĖĒĢ┤ ņÖ£Ļ│Ī ļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ļ│┤ņāüĒĢśĻĖ░ ņ£äĒĢ£ ĻĖ░ļ▓ĢņØĖ Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖöĻĖ░(DFE : Decision Feedback Equalizer)Ļ░Ć Ļ▓░ĒĢ®ļÉ£ BCJR ļō▒ĒÖöĻĖ░ ĻĄ¼ņĪ░ļź╝ ņĀ£ņĢłĒĢśĻ│Ā, Ļ▓ĮļČü ļ¼ĖĻ▓Įņŗ£ Ļ▓Įņ▓£ĒśĖņŚÉņä£ ņŗżņĀ£ ņłśņżæ ņŗżĒŚśņØä ĒåĄĒĢ┤ ņä▒ ļŖźņØä ļČäņäØĒĢśņśĆļŗż.
2. ņłśņżæ ĒåĄņŗĀņŚÉņä£ņØś ļ░śļ│Ą ĻĖ░ļ░śņØś ņåĪņłśņŗĀ ĻĄ¼ņĪ░
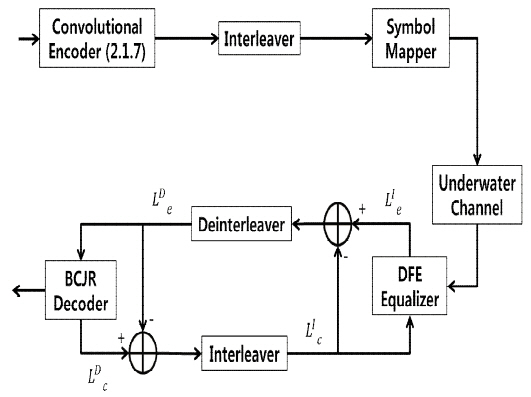
ņłśņżæņØīĒ¢źĒåĄņŗĀņØä ņøÉĒÖ£ĒĢśĻ▓ī ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņ▒äļäÉ ĒŖ╣ņä▒ņØä Ļ▓░ņĀĢ ĒĢśļŖö ĒĢ┤ņłśļ®┤, ĒĢ┤ņĀĆ, ņłśņŗ¼ ļō▒ņØś ņŗ£Ļ│ĄĻ░ä ļ│ĆĒÖöņŚÉ ņØśĒĢ£ ļŗżņżæĻ▓ĮļĪ£ ĒŖ╣ņä▒ņØ┤ļéś ļÅäĒöīļ¤¼ ĒÖĢņé░ņØ┤ ņŗ£ņŖżĒģ£ņØś ņäżĻ│äņŚÉ Ļ│ĀļĀżļÉśņ¢┤ņĢ╝ ĒĢ£ļŗż. ĒŖ╣Ē׳ ļŗżņżæ Ļ▓ĮļĪ£ļŖö ĒĢ┤ļ®┤ņØś ņŗ£ļ│Ć ņé░ļ×ĆņŚÉ ņØśĒĢ┤ ļÅäĒöīļ¤¼ ĒÖĢņé░ĒīīĻ░Ć ņ¦üņĀæĒīīņŚÉ Ēś╝ņ×ģļÉśņ¢┤ ĒåĄņŗĀ ņ▒äļäÉņØś ĒŖ╣ņä▒ņØä ņóīņÜ░ĒĢśĻ▓ī ļÉ£ļŗż. ļŗżņżæ Ļ▓ĮļĪ£ ĒÖśĻ▓ĮņŚÉņä£ ņøÉĒÖ£ĒĢ£ ĒåĄņŗĀĻ│╝ ĒĢ©Ļ╗ś ņłśņŗĀ ņŗĀĒśĖņØś ņä▒ļŖźņØä Ē¢źņāü ņŗ£ĒéżĻĖ░ ņ£äĒĢśņŚ¼ ļé«ņØĆ ņŗĀĒśĖ ļīĆ ņ×ĪņØīļ╣ä(SNR)ņŚÉņä£ ņÜ░ņłśĒĢ£ ņä▒ļŖźņØä ļ│┤ņØ┤ļŖö ļČĆĒśĖĒÖö ĻĖ░ļ▓ĢņØĖ BCJR(bahl et al, 1974)ĻĖ░ļ░ś ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖņÖĆ ļŗżņżæ Ļ▓ĮļĪ£ļĪ£ ņØĖĒĢ┤ ņÖ£Ļ│ĪļÉ£ ļŹ░ņØ┤Ēä░ļź╝ ļ│┤ņāüĒĢśĻĖ░ ņ£äĒĢ£ ĻĖ░ ļ▓ĢņØĖ Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖöĻĖ░(Berberdis, K et al, 1997; Salz, J, 1973)Ļ░Ć Ļ▓░ĒĢ®ļÉ£ Ēä░ļ│┤ ļō▒ĒÖöĻĖ░ ĻĄ¼ņĪ░( Tuchler et al, 2002; Koetter et al, 2004)ļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż. Fig. 1ņØĆ ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ ņĀ£ņĢł ĒĢśļŖö BCJR ļō▒ĒÖöĻĖ░ņØś ĻĄ¼ņĪ░ņØ┤ļŗż.
2.1 BCJR ļ│ĄĒśĖ ļ░®ņŗØ
BCJR ļ│ĄĒśĖĻĖ░ņŚÉņä£ļŖö BM(Branch Metric), FSM(Forward State Metric), BSM(Backward State Metric)ņØä ĻĄ¼ĒĢśĻĖ░ ņ£äĒĢś ņŚ¼ ņ×ģļĀź Ļ░ÆņŚÉ ļö░ļźĖ ņČ£ļĀź Ļ░ÆĻ│╝ ĒĢ©Ļ╗ś ļ│ĆĒÖöĒĢśļŖö ņāüĒā£ļź╝ ļéśĒāĆļé┤ļŖö Ļ▓®ņ×ÉļÅäļź╝ ņØ┤ņÜ®ĒĢ£ļŗż. BCJR ņŚ░ņé░ņŚÉ ņ׳ņ¢┤ ņ£ĀĒĢ£ĒĢ£ ņØ┤ņĀäņāüĒā£, ņ▒äļäÉ ņČ£ļĀź, ļŗżņØīņāüĒā£Ļ░Ć ņĪ┤ņ×¼ĒĢ£ļŗż. ņØ┤ņĀä ņāüĒā£ļŖö sŌĆ▓, Ēśäņ×¼ ņāüĒā£ļŖö s = ( x j ŌłÆ m , x j ŌłÆ m + 1 , Ōŗ» , x j , x j + 1 , Ōŗ» , x j + m ) x = ( x 1 , x 2 , Ōŗ» , x n ) r = ( r 1 , r 2 , Ōŗ» , r n ) x j = ( j = 1 , 2 , Ōŗ» , n )
FSMņØĆ ņŗØ (1)ņŚÉ ņØśĒĢ┤ a j ( s ) = log ŌĆē p ( s j = s , r 1 j )
BSMņØĆ ņŗØ (1)ņŚÉ ņØśĒĢ┤ ╬▓ j ( s ) = log ŌĆē p ( r j + 1 n | s ŌĆ▓ = s )
BMņØĆ ņŗØ (4)ņÖĆ Ļ░Öļŗż.
max*ļŖö ņŗØ (5)ļĪ£ ņĀĢņØśļÉ£ļŗż.
2.2 BCJR ļ│ĄĒśĖĻĖ░ļź╝ ņØ┤ņÜ®ĒĢ£ Ēä░ļ│┤ ļō▒ĒÖöĻĖ░
ņØ╝ļ░śņĀüņ£╝ļĪ£ ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖņØś ļ│ĄĒśĖļ░®ļ▓Ģņ£╝ļĪ£ļŖö Ļ▓ĮĒīÉņĀĢ Ļ░ÆņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ│ĄĒśĖļź╝ ņĀäĒ¢ēĒĢśļŖö ļ╣äĒä░ļ╣ä ņĢīĻ│Āļ”¼ņ”śņØ┤ ņé¼ņÜ®ļÉśņ¢┤ņ¦ĆĻ│Ā ņ׳ļŗż. ĒĢśņ¦Ćļ¦ī ļō▒ĒÖöĻĖ░ņÖĆņØś ļ░śļ│ĄņØä ĒåĄĒĢśņŚ¼ ņä▒ļŖźņØä Ē¢źņāüņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ņä£ļŖö Ļ▓ĮĒīÉņĀĢ Ļ░ÆņØ┤ ņĢäļŗī ņŚ░ĒīÉņĀĢ Ļ░ÆņØä ĒĢäņÜöļĪ£ ĒĢśĻ▓ī ļÉ£ļŗż. ņØ┤ ņŚÉ ņŚ░ĒīÉņĀĢņØä ĒåĄĒĢśņŚ¼ ļō▒ĒÖöĻĖ░ņŚÉ ņČöņĀĢļÉ£ Ļ░ÆņØä ņŚģļŹ░ņØ┤ĒŖĖĒĢśĻĖ░ ņ£äĒĢ┤ ņä£ BCJR ņĢīĻ│Āļ”¼ņ”śņØä ņé¼ņÜ®ĒĢśņśĆļŗż. Ēä░ļ│┤ ļō▒ĒÖöĻĖ░ļŖö ĻĖ░ņĪ┤ņØś ļō▒ĒÖö ĻĖ░ļ│┤ļŗż ņóŗņØĆ ņä▒ļŖźņØä ļ│┤ņØ┤ņ¦Ćļ¦ī MAP(Maximum a Posteriori) ņĢīĻ│Āļ”¼ņ”śņØä ņé¼ņÜ®ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ļ│Ąņ×ĪļÅäĻ░Ć ņ▒äļäÉ ĻĖĖņØ┤ ļō▒ņŚÉ ļīĆĒĢ┤ ņ¦ĆņłśņĀüņ£╝ļĪ£ ņ”ØĻ░ĆĒĢśļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż. ņØ┤ļ¤¼ĒĢ£ ņØ┤ņ£ĀļĪ£ ņØĖĒĢ┤ Ēä░ļ│┤ ļō▒ĒÖöĻĖ░ņØś ļ│Ąņ×ĪļÅäļź╝ ņżäņØ┤ĻĖ░ ņ£äĒĢ£ ļ░®ļ▓Ģņ£╝ļĪ£ MAP ļō▒ĒÖöĻĖ░ļ│┤ļŗż ļ│Ąņ×ĪļÅäĻ░Ć ņĀüņØĆ ņäĀĒśĢ ļō▒ĒÖöĻĖ░ļéś Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖöĻĖ░ļź╝ ņé¼ņÜ®ĒĢśļŖö ļ░®ļ▓ĢņØ┤ ņ׳ļŖöļŹ░ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö Fig. 1Ļ│╝ Ļ░ÖņØ┤ Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖö ĻĖ░ļź╝ Ļ░¢ļŖö Ēä░ļ│┤ ļō▒ĒÖöĻĖ░ļź╝ Ļ│ĀļĀżĒĢśņśĆļŗż.
ļŹ░ņØ┤Ēä░ļŖö ļČĆĒśĖĒÖöņ£©ņØ┤ 1/2ņØ┤Ļ│Ā ĻĄ¼ņåŹņן ņłśĻ░Ć 7Ļ░£ņØĖ (2.1.7) ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖĒÖöĻĖ░ Ļ▒░ņ╣£ ļÆż ņØĖĒä░ļ”¼ļ▓ä, ņŗ¼ļ▓ī ļ¦żĒĢæ Ēøä ļ│ĆņĪ░ĻĖ░ļź╝ ĒåĄĻ│╝ĒĢ£ļŗż. ņĀäņåĪļÉ£ ņŗ¼ļ▓īņØĆ ņ▒äļäÉņØä ĒåĄĻ│╝ĒĢ£ Ēøä ļ░▒ņāē Ļ░ĆņÜ░ņŗ£ņĢł ņ×Ī ņØīņØ┤ ļŹöĒĢ┤ņ¦äļŗż. ņłśņŗĀļŗ©ņØś Ēä░ļ│┤ ļō▒ĒÖöĻĖ░ļŖö ļō▒ĒÖöĻĖ░ņÖĆ ļ│ĄĒśĖĻĖ░ļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ņ£╝ļ®░, ļō▒ĒÖöĻĖ░ņÖĆ ļ│ĄĒśĖĻĖ░ļŖö ņØĖĒä░ļ”¼ļ▓ä, ļööņØĖĒä░ļ”¼ļ▓äļź╝ ĒåĄĒĢ┤ ņŚ░Ļ▓░ļÉśņ¢┤ ņä£ļĪ£ņØś ņĀĢļ│┤ļź╝ ļ░śļ│ĄĒĢ┤ņä£ Ļ░▒ņŗĀĒĢ£ļŗż. ņØĖĒä░ļ”¼ļ▓äļŖö ņåĪņŗĀ ņĖĪņŚÉņä£ ĒĢ£ Ļ░£ ļĖöļĪØ Ēü¼ĻĖ░ņØś ļČĆĒśĖĻĖ░ ņČ£ļĀź Ļ░ÆņØä ņ×¼ļ░░ņ╣śņŗ£Ēéż Ļ│Ā, ļööņØĖĒä░ļ”¼ļ▓äļŖö ņØĖĒä░ļ”¼ļ▓äņØś ņŚŁ Ļ│╝ņĀĢņØä Ļ▒░ņ│É ņåĪņŗĀņŗĀĒśĖļź╝ ļ│Ą ņøÉĒĢ£ļŗż. ļ│ĄĒśĖĻĖ░ņŚÉņä£ ņČ£ļĀźĒĢ£ Ēö╝ļō£ļ░▒ ņĀĢļ│┤ļŖö ļŗżņŗ£ ņØĖĒä░ļ”¼ļ╣Ö Ļ│╝ ņĀĢņØä Ļ▒░ņ│É ņĀĢņĀĢļÉ£ ņŗĀĒśĖļź╝ ļō▒ĒÖöĻĖ░ņŚÉ ņ×¼ņ×ģļĀźĒĢ£ļŗż. ņåĪņŗĀļÉ£ ņŗĀĒśĖ ļŖö ņłśņżæņ▒äļäÉņØä Ļ▒░ņ╣śĻ│Ā ļ░▒ņāē Ļ░ĆņÜ░ņŗ£ņĢł ņ×ĪņØīņØ┤ ļŹöĒĢ┤ņĀĖ ņłśņŗĀļÉ£ ļŗż. ĻĖ░ņĀĆļīĆņŚŁņ£╝ļĪ£ ļ│ĆĒÖśĒĢ£ Ēøä L e I
╬╝ļŖö ņłśļĀ┤ņāüņłśņØ┤Ļ│Ā e D [ k ] = L e I ŌłÆ L e I ^ [ k ] L e I [ k ] L e I ^ [ k ] c j [ k + 1 ] , b j [ k + 1 ]
sgn{┬Ę}ņØĆ ņĢäļלņÖĆ Ļ░ÖņØ┤ ņĀĢņØśļÉśļŖö ņŗ£ĻĘĖļäś ĒĢ©ņłśņØ┤ļ®░, es [k]ļŖö ņŗØ (11)Ļ│╝ Ļ░ÖņØĆ Sato ņŚÉļ¤¼ņØ┤ļŗż.
ņŚ¼ĻĖ░ņä£ ╬│ļŖö ņĀüņĀłĒĢ£ ņāüņłś Ļ░ÆņØ┤ļŗż. L e D L e I L c I L c D
extrinsic Ļ░Æ L c D L c D L e D L c I L c I
2.3 Ļ▓ĮĒīÉņĀĢ ļ░Å ņŚ░ĒīÉņĀĢ ļ╣äĒä░ļ╣ä ļ│ĄĒśĖ ļ░®ņŗØ
ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖĒÖö ĻĖ░ļ▓ĢņØś ļ│ĄĒśĖ ņĢīĻ│Āļ”¼ņ”śņØĖ ļ╣äĒä░ļ╣ä ļ│ĄĒśĖ ņĢī Ļ│Āļ”¼ņ”śņØĆ ņĄ£ņÜ░ ņČöņĀĢ ļ░®ņŗØ(maximum likelihood)ņØś ņĢīĻ│Āļ”¼ņ”śņ£╝ ļĪ£ņä£ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ļ│ĄĒśĖ ļ░®ņŗØņ£╝ļĪ£ ļéśļēĀ ņłś ņ׳ļŗż.
ņ▓½ ļ▓łņ¦Ė Ļ▓ĮĒīÉņĀĢ(Hard decision) ļ│ĄĒśĖ ļ░®ņŗØņ£╝ļĪ£ ļ╣äĒä░ļ╣ä ļ│ĄĒśĖ ĻĖ░ņØś ĻĄ¼ņĪ░ņŚÉņä£ ņłśņŗĀļÉ£ ņŗĀĒśĖļŖö ĒŖĖļĀÉļ”¼ņŖżļÅäņŚÉņä£ branch codewordņÖĆ BM(Branch Metric)ņØä ĻĄ¼ĒĢ£ļŗż. ņŚ¼ĻĖ░ņä£ ņłśņŗĀļÉ£ ņŗĀ ĒśĖļź╝ ŌĆ£0ŌĆØ ļśÉļŖö ŌĆ£1ŌĆØļĪ£ Ļ▓░ņĀĢĒĢśņŚ¼ ĒĢ┤ļ░ŹĻ▒░ļ”¼ļź╝ ĻĄ¼ĒĢśņŚ¼ ļ│ĄĒśĖĒĢśļŖö ļ░®ņŗØņØ┤ Ļ▓ĮĒīÉņĀĢ ļ░®ņŗØņØ┤ļŗż. ĻĘĖļ”¼Ļ│Ā ņŚ░ĒīÉņĀĢ(Soft decision)ļ░®ņŗØņØĆ ņłśņŗĀļÉ£ ņŗĀĒśĖļź╝ n ļ╣äĒŖĖ ņ¢æņ×ÉĒÖöĒĢśņŚ¼ ņ¢æņ×ÉĒÖöļÉ£ branch codeword ņÖĆņØś Ļ▒░ļ”¼ņ░©ļź╝ ĻĄ¼ĒĢśļŖö ļ░®ņŗØņØ┤ļŗż(klar, Bernard,2001).
3. ņŗżĒŚś ĒÖśĻ▓Į
Ļ▓ĮļČü ļ¼ĖĻ▓Įņŗ£ Ļ▓Įņ▓£ĒśĖņŚÉņä£ņØś ņŗżĒŚśņØä ĒåĄĒĢ┤ ĒÜ©ņ£©ņĀüņØĖ ļ│ĄĒśĖ ļ░® ņŗØņŚÉ ļīĆĒĢ£ ņä▒ļŖźņØä ĒÖĢņØĖĒĢśņśĆļŗż. ņŗżĒŚś ņŗ£ĻĖ░ļŖö 2014ļģä 3ņøöņ┤łļĪ£ ņłśļ®┤ ņāüĒā£ļŖö ļ░öļ×īņØś ņØśĒĢ£ ņśüĒ¢źņØ┤ ņ׳ņŚłņ£╝ļ®░ ņåĪņłśņŗĀĻĖ░ ņé¼ņØ┤ņØś Ļ▒░ļ”¼ļŖö ņĢĮ 400 mļĪ£ ĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā ņåĪņŗĀĻĖ░ļŖö ņłśļ®┤ ņĢäļל 2 m, ņłśņŗĀĻĖ░ļŖö 30 m ņĢäļל ņ£äņ╣śĒĢśņśĆļŗż.
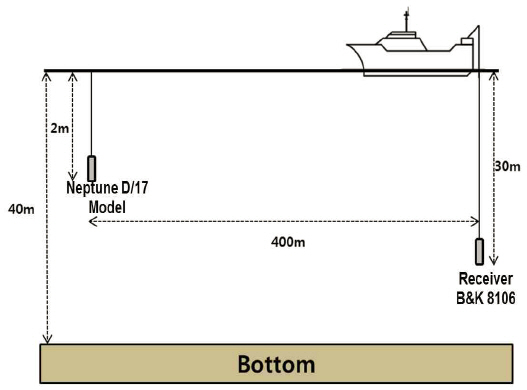
Table 1Ļ│╝ Ļ░ÖņØĆ ĒīīļØ╝ļ®öĒāĆļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗżņĀ£ ņłśņżæ ņŗżĒŚśņØä ĒĢś ņśĆļŗż. ļŹ░ņØ┤Ēä░ ņåŹļÅäļŖö 1kbps, ņżæņŗ¼ ņŻ╝ĒīīņłśļŖö 16kHz, ņāśĒöīļ¦ü ņŻ╝ ĒīīņłśļŖö 12ļ░░ņØĖ 192kHzļź╝ ņĀüņÜ®ĒĢśņśĆļŗż. ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖĒÖö ļ░®ņŗØ ņØä ņĀüņÜ®ĒĢśņśĆņ£╝ļ®░, ļ│ĆņĪ░ļŖö QPSK ļ│ĆņĪ░ ļ░®ņŗØņØä ņĀüņÜ®ĒĢśņśĆļŗż.

Fig 3ņŚÉņä£ ņ▓śņØīĻ│╝ ļüØņØś ņŗĀĒśĖļŖö LFM(Linear Frequency Modulation)ņØ┤ļ®░, ņØ┤ļŖö Ēī©ĒéĘņØś ņŗ£ņ×æĻ│╝ ļüØņØä ņĢīļ”¼ļŖö ņŗĀĒśĖņØ┤ļ®░, ļæÉ ļ▓łņ¦Ė ņŗĀĒśĖņØĖ ĒøłļĀ©(training) ļŹ░ņØ┤Ēä░ļŖö ņłśņŗĀļÉśļŖö ņŗĀĒśĖņØś ņĀĢ ĒÖĢĒĢ£ ĒāĆņØ┤ļ░ŹņØä ņ×ĪĻĖ░ ņ£äĒĢ┤ ņé¼ņÜ®ļÉśņŚłņ£╝ļ®░, ļśÉĒĢ£ Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖö ĻĖ░ņŚÉņä£ ļŗżņżæ Ļ▓ĮļĪ£ļź╝ ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢ┤ ņé¼ņÜ®ļÉśņŚłļŗż. ĻĘĖļ”╝ 3Ļ│╝ Ļ░Ö ņØĆ Ēī©ĒéĘ ĻĄ¼ņĪ░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņŗżĒŚśņØä ņ¦äĒ¢ēĒĢśņśĆļŗż.

4. ņŗżĒŚś Ļ▓░Ļ│╝
4.1 ļ│ĄĒśĖ ļ░®ņŗØļ│ä ņä▒ļŖź ļČäņäØ
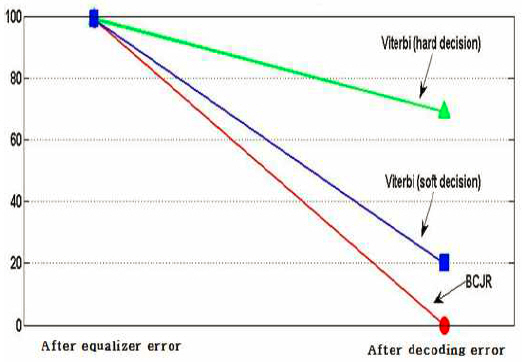
Fig 4ņØĆ ņŗżņĀ£ ņłśņżæņŗżĒŚśņŚÉņä£ ņłśņŗĀ ņŗĀĒśĖĻ░Ć 944ļ╣äĒŖĖ ņżæ Ļ▓░ņĀĢ ĻČżĒÖś ļō▒ĒÖöĻĖ░ ĒåĄĻ│╝ Ēøä 99ļ╣äĒŖĖņØś ņśżļźśĻ░Ć ļ░£ņāØĒĢ£ ļŹ░ņØ┤Ēä░Ļ░Ć ļ╣äĒä░ ļ╣ä Ļ▓ĮĒīÉņĀĢ(Hard Decision) ļ│ĄĒśĖ ĒĢĀ Ļ▓ĮņÜ░ 69ļ╣äĒŖĖ, ļ╣äĒä░ļ╣ä ņŚ░ĒīÉ ņĀĢ(Soft Decision) ļ│ĄĒśĖ ĒĢĀ Ļ▓ĮņÜ░ 20ļ╣äĒŖĖ ņśżļźśĻ░Ć ļ░£ņāØĒĢśĻ│Ā BCJRņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ░śļ│Ą ļ│ĄĒśĖ ĒĢĀ Ļ▓ĮņÜ░ ļ¬©ļōĀ ņśżļźśĻ░Ć ļ│ĄĒśĖļÉśņ¢┤ ņÖäļ▓ĮĒĢ£ ņŗĀĒśĖĻ░Ć ļÉśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
4.2 BCJR ļČĆĒśĖĻĖ░ ņä▒ļŖź
Table 2ļŖö ņ╗©ļ│╝ļŻ©ņģś ļČĆĒśĖ ĻĖ░ļ░śņØś BCJR ļ│ĄĒśĖĻĖ░ļź╝ ņØ┤ņÜ®ĒĢ£ Ēä░ļ│┤ ļō▒ĒÖö ĻĖ░ļ▓Ģ ņä▒ļŖźņØä ļéśĒāĆļéĖļŗż. Ēæ£ 2ņŚÉņä£ļŖö Ēä░ļ│┤ ļō▒ĒÖö ļ│ĄĒśĖ ņØ┤ņĀäņØś ņśżļźśņ£©ņØĆ LMS-DFE ņČ£ļĀźļŗ©ņŚÉņä£ ņśżļźśļź╝ ņĖĪņĀĢ ĒĢśņśĆņ£╝ ļ®░, ņØ╝ņĀĢĒĢ£ ļ░śļ│ĄĒܤņłśņŚÉņä£ Ļ░üĻ░üņØś ļČĆĒśĖĒÖö ļ░®ņŗØņŚÉ ļö░ļźĖ ņśżļźśņ£© ņØä ļéśĒāĆļéĖļŗż. 16ļ▓łņØś ņŗ£ļÅä ņżæ 13ļ▓łņØ┤ ņśżļźśļź╝ ņÖäļ▓ĮĒ׳ ņĀĢņĀĢĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. ļ░śļ│ĄĒܤņłśļŖö ĒÅēĻĘĀ 1ĒÜīņŚÉņä£ 3ĒÜī ņĀĢļÅäņŚÉ ņśżļźśĻ░Ć ņĀĢņĀĢ ļÉ©ņØä ņĢī ņłś ņ׳ņ£╝ļ®░, ļ│ĄĒśĖĻĖ░ ņ×ģļĀźļŗ©ņØś ņśżļźśņ£©ņØ┤ 10-1ņØ┤ĒĢśņØ┤ļ®┤ ļ¬©ļæÉ ļ│ĄĒśĖ Ļ░ĆļŖźĒĢ©ņØä ņĢī ņłś ņ׳ļŗż.
Table┬Ā2
Experimental results of BCJR equalizer
5. Ļ▓░ ļĪĀ
ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ļŗżņżæ Ļ▓ĮļĪ£ ĒÖśĻ▓ĮņŚÉņä£ ņøÉĒÖ£ĒĢ£ ĒåĄņŗĀĻ│╝ ĒĢ©Ļ╗ś ņłś ņŗĀ ņŗĀĒśĖņØś ņä▒ļŖźņØä Ē¢źņāüņŗ£ĒéżĻĖ░ ņ£äĒĢ£ ļ╣äĒä░ļ╣ä Ļ▓ĮĒīÉņĀĢ, ļ╣äĒä░ļ╣ä ņŚ░ ĒīÉņĀĢ, BCJR ļ│ĄĒśĖĻĖ░ļź╝ ļ╣äĻĄÉ ļČäņäØņØä ĒĢ┤ļ│┤ņĢśļŗż. ņŗżņĀ£ ņłśņżæ ĒåĄņŗĀ ņŗżĒŚśņŚÉņä£ ņłśņŗĀņŗĀĒśĖ 944ļ╣äĒŖĖ ņżæ BCJRņØä ņØ┤ņÜ®ĒĢ£ ļ│ĄĒśĖ ļ░®ļ▓Ģļ¦īņØ┤ ļ¬©ļōĀ ņśżļźśļź╝ ļ│ĄĒśĖ ĒĢĀ ņłś ņ׳ņŚłļŗż. BCJR ĻĖ░ļ░śņØś Ēä░ļ│┤ ļō▒ĒÖö ĻĄ¼ņĪ░ Ļ░Ć ļŗżļźĖ ļ╣äĒä░ļ╣ä ļ│ĄĒśĖļ░®ņŗØņØś Ļ▓ĮĒīÉņĀĢ, ņŚ░ĒīÉņĀĢ ĻĖ░ļ▓ĢņŚÉ ļ╣äĒĢ┤ ņä▒ļŖź ņØ┤ ņÜ░ņłśĒĢ©ņØä ļ│╝ ņłś ņ׳ļŗż.
ņØ┤ļ¤¼ĒĢ£ BCJR ļ│ĄĒśĖņØś ņä▒ļŖźņØĆ ļ░śļ│ĄĒܤņłśļŖö ĒÅēĻĘĀ 1ĒÜīņŚÉņä£ 3ĒÜī ņĀĢļÅäņŚÉ ņśżļźśĻ░Ć ņĀĢņĀĢļÉśĻ│Ā, ļ│ĄĒśĖĻĖ░ ņ×ģļĀźļŗ©ņØś ņśżļźśņ£©ņØ┤ 10-1ņØ┤ ĒĢśņØ┤ļ®┤ ļ¬©ļæÉ ļ│ĄĒśĖĻ░Ć Ļ░ĆļŖźĒĢ©ņØä ļ│╝ ņłś ņ׳ņ£╝ļ®░, 16ļ▓łņØś ņłśņżæĒåĄņŗĀ ņŗżĒŚśņØĆ ņĢĮ 83%ņØś ņä▒Ļ│ĄļźĀņØä ĒÜŹļōØĒĢśņśĆļŗż.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






