GPS 신호세기 정보를 이용한 다중경로신호 검출 분석에 대한 연구
A Study on Analysis of Multipath Signal Detection using GPS Signal Strength Information
Article information
Abstract
GPS 모듈을 탑재한 모바일 단말기는 꾸준히 증가하고 있으나 코드의사거리를 측위에 사용하므로 반송파 위상을 사용하는 GPS 수신기에 비해 정확도가 낮다. 특히 다중경로신호는 반송파 위상 수신기에 비해 측위 결과에 더욱 큰 영향을 미치므로 다중경로신호를 검출 하여 측위에서 제거하는 방안이 필요하다. 이 연구에서는 다중경로신호의 검출을 위해 위성의 신호세기를 이용하는 방법에 대해 초기 분석을 수행하였다. 개활지환경에서 GPS 위성의 고도각이 증가함에 따라 신호세기가 증가하는 것이 확인되었고, 주변에 장애물이 있는 지역에서는 시선방향에 차폐요소가 있는 위성의 신호세기가 감쇄되어 기록되는 것을 확인하였다. 이러한 현상이 GPS 위성이 동일 궤도를 지날 때에도 반복되어 발생하는지 확인하기 위해 위성의 재현시간을 적용하여 비교 분석하였다. 그 결과 GPS 위성 신호세기 변동 특성은 위성이 궤도상 의 동일 위치를 지날 때에도 거의 완벽하게 재현되었고, 이 현상이 일시적인 현상이 아니라 관측 환경에 의해 거의 완벽히 재현되는 결과임을 확인할 수 있었다. 따라서 신호세기를 이용한 다중경로신호의 검출이 가능할 것으로 판단된다.
Trans Abstract
The number of mobile terminals equipped with a GPS module is steadily increasing today. However, because they using code pseudorange measurements in positioning, the positioning accuracy of mobile terminals is lower than that of those receivers using carrier phases. Especially, the multipath signal causes more significant errors in code pseudoranges. Therefore, the techniques of multipath detection and elimination is necessary. In this study, as an initial analysis of multipath detection and elimination technique development, we tested the feasibility of multipath signal detection using GPS signal strength information. We found that the GPS signal strength increases as the elevation angle gets higher in the open-sky environment. Also, we found that the signal strength decreases when there were some signal reflectors nearby. We checked the repeatability of the signal strength variation characteristics by reflecting repeat time of GPS satellites. As a result, this characteristics repeats almost perfectly when GPS satellites pass the same orbit. Therefore, we found that it is not a temporary phenomenon and the multipath signal detection should be possible by using GPS signal strength information.
1. 서 론
위치기반서비스(Location Based Service, LBS) 사용자가 전 세계적으로 증가함에 따라 이를 구현하기 위한 다양한 측 위 기술 중 언제 어디서나 위치정보를 실시간으로 산출할 수 있는 시스템인 위성항법시스템(Global Navigation Satellite System, GNSS)에 대한 중요성이 부각되고 있다. 유럽의 GSA(The European GNSS Agency)는 2022년에는 약 60억 개 이상의 모바일 단말기가 GNSS 수신기를 탑재할 것이고 그중에서도 스마트폰은 전체 GNSS 탑재 장비 시장규모의 약 70% 이상을 점유하는 분야가 될 것으로 전망된다고 발표하였 다(GSA, 2013). 이처럼 향후 GNSS가 탑재된 소형 단말의 사 용자는 점차 증가할 것으로 예상된다.
GPS(Global Positioning System) 모듈을 탑재한 스마트폰 등의 단말에서는 코드의사거리(pseudorange) 관측치를 측위 에 사용하며, 그 정확도는 수십 미터 수준에 이른다. 이러한 GPS 수신 단말에서는 반송파 위상(carrier phase) 수신기에 비해 낮은 정확도의 측위 결과를 제공한다. 그러나 코드의사 거리 관측치를 이용하는 GPS 수신 모듈의 경우 반송파 위상 관측치를 이용하는 것에 비해 가격이 저렴하고 크기가 작아 휴대가 용이한 장점이 있기 때문에 일반 사용자를 위한 단말 에 널리 적용되고 있다.
다중경로오차는 GPS 위성으로부터 직접 수신된 신호 이외 에 주위의 지형지물에 반사된(reflected) 신호로 인해 발생하 는 오차로 코드의사거리 관측치의 경우 보통 10~20m 측위 오차를 유발하나 도심의 빌딩이 인접한 지역에서는 측위 오차 가 100m 까지도 발생할 수 있다(Wells et al., 1987; Nee, 1992). 반면 반송파 위상을 사용하는 GPS 수신기의 경우 다중 경로 신호로 인해 cm 수준의 측위 오차가 발생하므로 코드의 사거리 관측치를 이용하는 GPS 단말은 이에 비해 다중경로오 차에 취약하다. 또한 앞서 기술한 바와 같이 도심지에서는 개 활지(open-sky)에 비해 다중경로오차를 유발할 수 있는 반사 체들이 관측 환경 주변에 많이 위치하고 있으므로 이를 고려 한 측위 시스템 개선이 필요하다.
다중경로 오차를 유발하는 지상의 반사체는 일반적으로 에 너지양이 반사 후에도 그대로 보존되는 완전 반사가 아닌 불 완전 반사의 특성을 나타내므로 다중경로 신호는 직접 수신된 신호에 비해 신호세기의 저하가 발생할 수 있다. 그러므로 이 러한 이론적 특성이 실제 GPS 관측 결과에서도 발견된다면 GPS 위성의 신호세기를 이용하여 다중경로 신호 검출이 가능 하다. 따라서 이 연구에서는 GPS 위성의 신호세기를 이용한 다중경로 신호 검출이 가능한지 판단하기 위해 신호세기 관측 결과를 분석하였다. 단일주파수 수신기와 안테나를 이용해 개 활지 환경에서 정지측위를 수행하여 GPS 위성의 신호세기를 분석하였고, 다중경로 신호가 많을 것으로 판단되는 난수신환 경을 선정하여 동일한 실험을 수행하였다. 각각의 환경에서 수신한 관측 파일에서 위성의 방위각, 고도각별 신호세기를 비교하여 분석을 수행하였다.
2. 개활지환경의 GPS 위성 신호세기 특성
GPS 위성의 신호세기는 신호 대 잡음비인 SNR(Signal to Noise Ratio)로 표현된다. GPS 관측 RINEX(Receiver Independent EXchange format) 파일에는 관측치와 함께 SNR에 대한 정보를 0 에서 9 까지의 한 자리의 숫자로 제공 한다. 또한 S1, S2(GPS 위성의 L1, L2 주파수 대역에서의 신 호세기) 등의 데이터 수집이 가능할 경우 주파수 대역별 위성 의 신호세기를 제공하기도 한다. Fig. 1은 NovAtel 사의 OEMStar 단일주파수 수신기에서 획득한 RINEX 파일에 기 록되어 있는 한 자리수의 SNR과 S1 데이터를 나타낸다. Fig. 1과 같이 C1과 L1(L1 주파수 대역에서의 코드 의사거리 관측 치와 반송파 위상 관측치) 데이터에 각각 한 자리의 SNR 데 이터와 네 번째 데이터 열에 나타나는 S1 데이터가 존재하는 것을 확인할 수 있다. IGS(International GNSS Service)는 RINEX 2.11의 설명서에서 C1과 L1에 나타나는 한 자리의 SNR에 대한 정보를 Table 1과 같이 정의하고 있다(Gurtner and Estey, 2007).
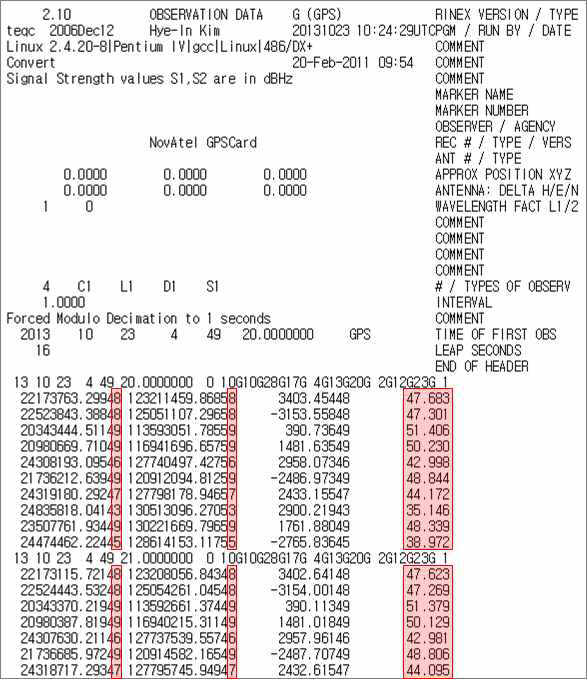
Parameters about signal strength in a RINEX file

Meanings of SNR value(Gurtner and Estey, 2007)
주변에 장애물이 없는 개활지 환경에서 신호세기가 어떻게 나타나는지 확인하기 위해 2013년 10월 23일(DOY 296) 인하 대학교 5호관 옥상에서 ublox EVK-5T 수신기와 ANN-MS-0-005 안테나, NovAtel OEMStar 수신기와 GPS-701GG 안테나를 이용하여 동시에 약 4시간 동안 관측 자료를 수집한 뒤 그 결과를 Fig. 2와 같이 나타내었다. 여기 서 두 수신기의 안테나는 서로 약 1m 간격으로 수평거리를 이격하여 관측하였다. 관측 RINEX 파일에 기록된 신호세기 정보와 항법 RINEX 파일(방송궤도력, broadcast ephemeris) 을 이용하여 신호세기가 기록된 위성과 해당 시점의 위성 위 치를 산출하여 Fig. 2와 같이 위성의 고도각에 따른 신호세기 를 나타내었다. Fig. 2는 관측된 모든 위성에서의 고도각에 따 른 신호세기를 나타내며 위쪽은 ublox 수신기의 결과를, 아래 쪽은 NovAtel 수신기의 결과를 나타낸다. 그림에서 왼쪽은 L1 데이터에서의 SNR, 오른쪽은 S1 데이터를 나타낸다. Fig. 2와 같이 ublox의 S1 데이터는 정수로 표현되어 NovAtel과는 달리 여러 평행선이 겹쳐진 모습으로 나타났다. Fig. 2의 모든 그래프에서 위성의 고도각이 높아질수록 신호세기는 증가하 는 형태가 나타났고, 이러한 패턴은 장비에 따라 다르게 나타 나는 것을 확인할 수 있었다. 또한 L1과 C1 등의 데이터에서 한 자리수로 제공되는 SNR 정보는 S1에 비해 신호세기를 나 타내는 해상도가 낮기 때문에 고도각에 따른 신호세기를 분석 하기에는 S1 데이터를 이용해야 할 것으로 판단되었다.
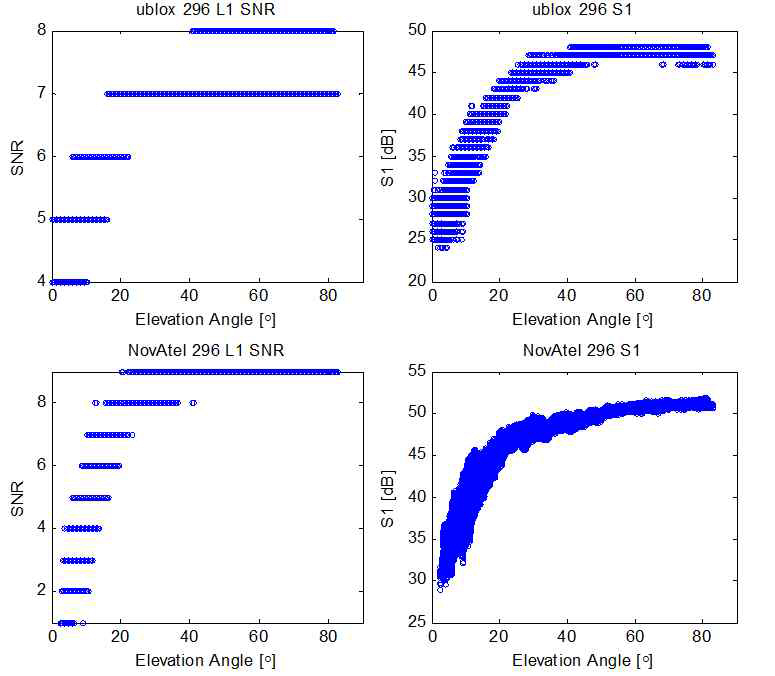
Signal strengths according to the elevation angle
Fig. 3의 왼쪽은 skyplot을 이용하여 위성의 방위각, 고도각 에 따른 S1 신호세기를 나타낸 결과이고 오른쪽은 이를 평면 에 나타낸 결과이다. Fig. 3에서도 위성의 고도각이 높아질수 록 신호세기는 커지고, 위성의 고도각이 낮아질수록 신호세기 가 작아지는 것을 확인할 수 있었다. ublox와 NovAtel의 기종 별 차이를 살펴보면 NovAtel이 ublox에 비해 전반적으로 신 호세기가 크게 나타났다. Fig. 3의 결과를 통해 개활지에서 관 측된 위성의 신호세기는 특정 방위각에 관계없이 고도각에 따 라 좌우되며 장비에 따라 값이 다르게 나타난다고 판단할 수 있었다.
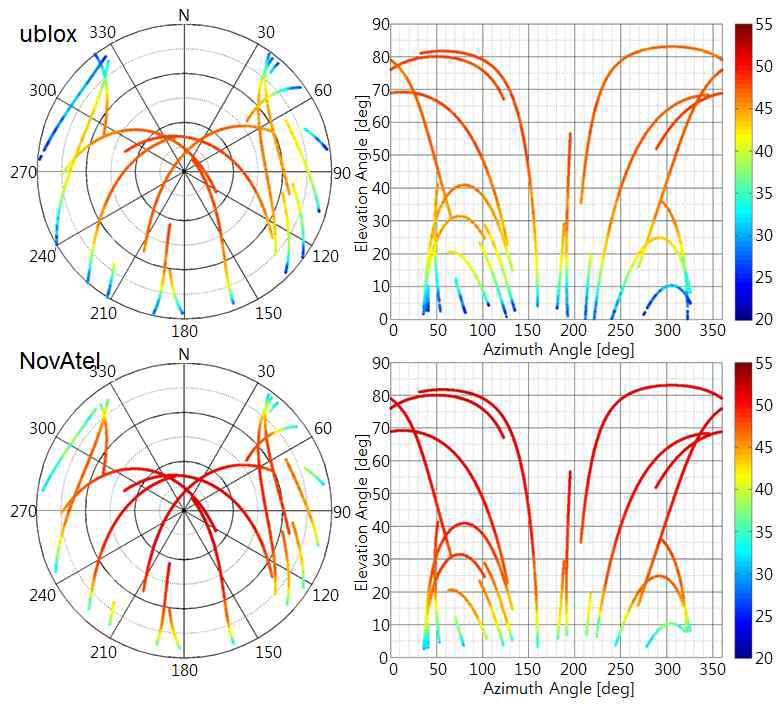
Signal strengths according to azimuth and elevation angle
3. 난수신환경의 GPS 위성 신호세기 특성
관측환경에 따른 신호세기를 비교하기 위해 앞서 분석한 개활지환경(IHU5) 외에 난수신환경으로 강남구 테헤란로 (TEHE)를 대상으로 분석을 수행하였다. Fig. 4는 개활지환경 과 난수신환경의 항공사진이고 여기서 빨간 세모는 GPS 관측 지점을 나타낸다. IHU5는 인하대학교 5호관 옥상으로 주변에 장애물이 거의 없는 환경이다. 반면 TEHE는 국내에서는 관 측환경이 좋지 않은 대표적인 지역으로 관측지점 인근에는 20 층 이상의 고층 건물들이 밀집되어 있다. 관측장비는 IHU5와 마찬가지로 TEHE에서도 NovAtel OEMStar 수신기와 GPS-701-GG 안테나를 사용하였다.
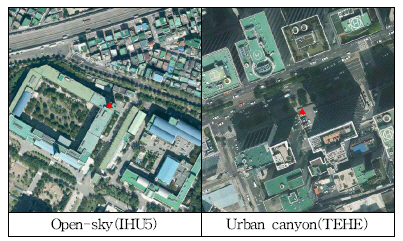
Aerial photographs of each observation environments
Fig. 5는 난수신환경에서 관측된 S1 값의 skyplot을 3차원 영상과 중첩한 결과를 나타낸다. 여기서 skyplot의 중심점은 관측을 수행했던 측점과 일치한다. 기존 개활지환경에서의 실 험에서는 Fig. 3과 같이 고도각이 높을수록 신호세기가 강해 지는 일반적인 특성이 나타났지만 Fig. 5에서는 도로 및 주변 지형지물의 형상과 유사하게 신호세기가 달라지는 특성이 나 타나는 것을 확인할 수 있었다. 특히 신호가 차폐되어 수신기 에 들어올 수 없었던 위성의 신호가 기록되는 것을 확인할 수 있었는데, 이 신호들은 Fig. 5에서 장애물이 없는 방향에서 기 록된 신호세기 특성과는 확연히 차이를 보이는 것이 발견되었 다. 또한 건물에 의해 완전히 차폐된 방향에 존재한 위성의 신 호가 기록되는 것으로 보아 이 신호들은 다중경로를 통해 도 달한 신호라고 판단되었다.
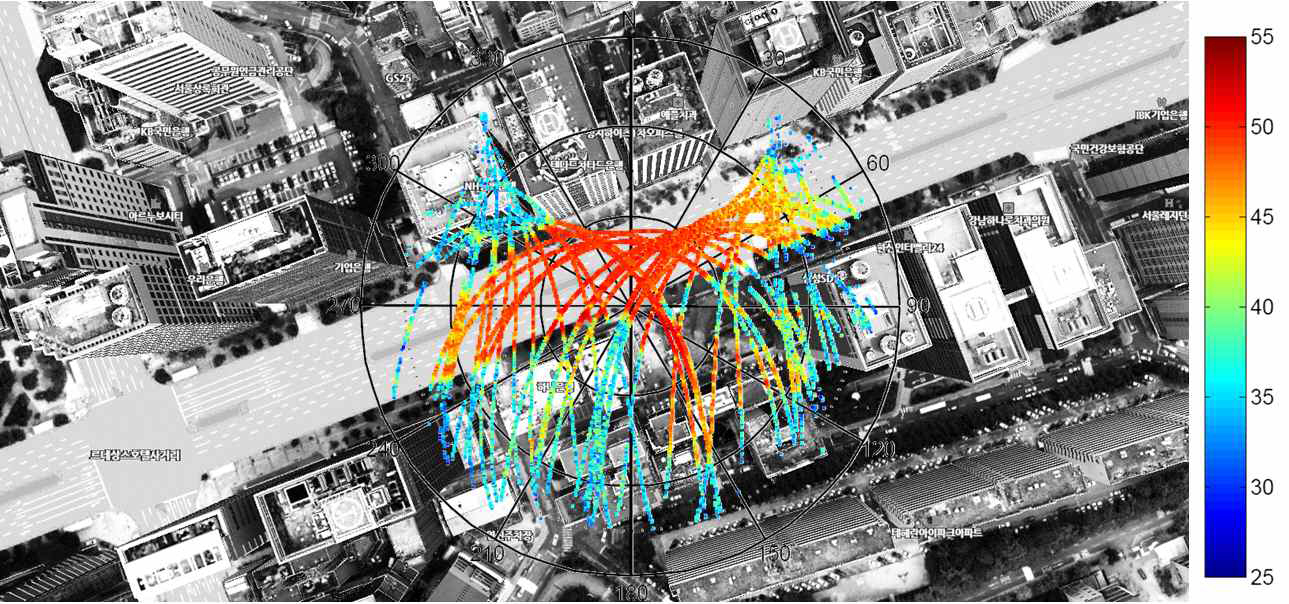
Overlapped result of signal strength skyplot and three-dimensional image
4. GPS 위성 신호세기 특성의 재현성 분석
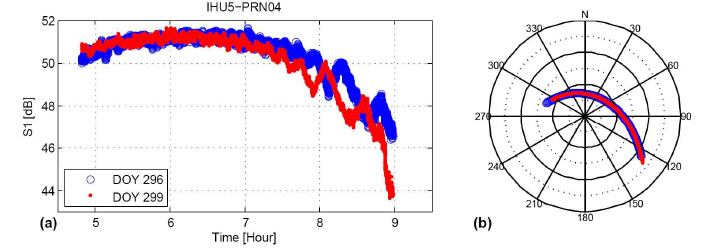
Fig. 5에 나타나는 신호세기 변동 특성이 일시적인 현상에 기인한 결과인지, 아니면 GPS 위성이 동일 궤도를 지날 때에 도 유사한 결과가 나타나는지 확인하기 위해 동일 위성이 관 측지점 상공을 다시 통과할 때의 신호세기를 비교하였다. Fig. 6의 (a)는 개활지환경에서 DOY 296일과 299일의 PRN 4번 위 성의 신호세기 관측 결과를 동일 시간에 대해 비교한 결과이 고, (b)는 (a)에 나타낸 위성의 위치를 skyplot에 나타낸 결과 이다. GPS 위성의 경로는 관측 지점을 기준으로 서쪽에서 동 쪽으로 이동하는 경로였으나 동일 시간을 비교했음에도 불구 하고 DOY 299일의 궤도가 더 앞서 나가는 것을 확인할 수 있 었다. 이는 GPS 위성의 공전 주기를 반영하지 않았기 때문에 나타나는 결과로 동일한 조건상에서의 비교 분석을 위해서는 이를 반영해야 한다.
Comparison result of GPS signal strength and skyplot which do not reflected the orbital period
GPS 위성은 1항성일(sidereal day)에 두 번 지구를 공전하 여 다시 같은 위치로 돌아오는데 이를 재현시간(repeat time) 이라 한다(Park et al., 2004; Choi et al., 2004). 재현시간은 날 짜와 위성에 따라 조금씩 다르게 나타나며 대략 86,140~ 86,170초 사이의 값을 갖는다(Agnew and Larson, 2007). 이 연구에서는 Lee et al.(2009)이 사용한 방법을 기반으로 신속 궤도력(rapid ephemeris)으로부터 획득한 위성의 위치정보를 이용하여 위성이 동일 궤도상에 나타나는 시점으로 관측 자료 를 접합하여 위성의 신호세기를 비교하는 방법을 적용하였다. 신속궤도력에는 15분 간격의 궤도 정보가 있으므로 Lagrange 보간 다항식을 적용하여 1초 간격의 궤도 정보를 생성하였다. 전날과 다음날에 대한 1초 간격 궤도 정보를 생성한 후 전날 의 궤도 정보는 고정하고 다음날의 궤도정보를 1초씩 이동하 면서 상관관계를 산출하였다. 최종적으로 상관관계가 가장 높 게 나타나는 시간차(time lag)를 계산하면 위성의 재현시간을 계산할 수 있다.
Fig. 7은 2013년 11월 5일부터 7일까지의 분석을 통해 각각 의 GPS 위성에 대한 공전 시간차를 계산한 결과를 나타낸다. Fig. 7과 같이 GPS 위성은 공전 주기에서 서로 다른 시간차 를 가지고 있으며, 동일 위성의 경우에도 날짜별로 다른 결과 가 나타난다. Fig. 7과 같이 3일간 산출한 GPS 위성의 공전 시간차는 240~254초의 범위를 가진다. 즉, 해당 기간 동안 GPS 위성들은 86,146~86,160초의 주기로 공전했다는 것을 확 인할 수 있다. 따라서 두 날짜에 관측한 결과를 이용하여 동일 궤도상에서의 신호세기를 비교하기 위해서는 해당 날짜에서 의 위성별 재현시간을 적용하여 비교할 수 있다.
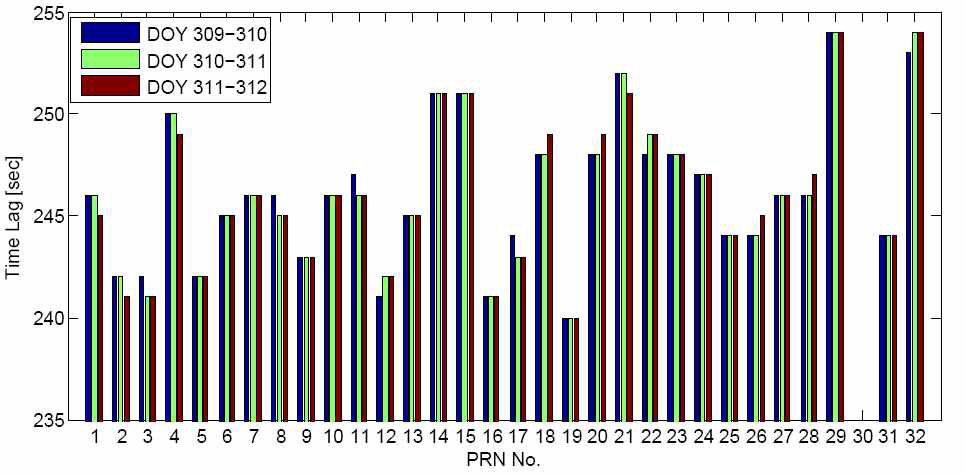
Time lag of each GPS satellites during 3 days
Fig. 8의 (a)와 (b)는 개활지환경에서 PRN17번과 12번 위 성의 신호세기와 관측 지점으로부터 위성의 방위각 고도각을 DOY 296일과 299일의 관측 자료를 이용하여 비교하는 과정 을 나타낸다. (a), (b)에서 왼쪽의 그림은 위성의 repeat time 을 고려하기 전의 비교 결과를 나타내고, 오른쪽은 재현시간 을 고려한 후의 결과를 나타낸다. Fig. 8과 같이 위성의 재현 시간을 고려하기 전에는 기하학적인 위치관계가 약간 어긋나 고 이에 따라 신호세기 관측 결과도 다르게 나타나는 것을 확 인할 수 있었다. 각각의 위성별 재현시간을 고려하여 비교한 결과에서는 방위각, 고도각 및 신호세기가 거의 완벽하게 일 치하는 것을 확인할 수 있었다.
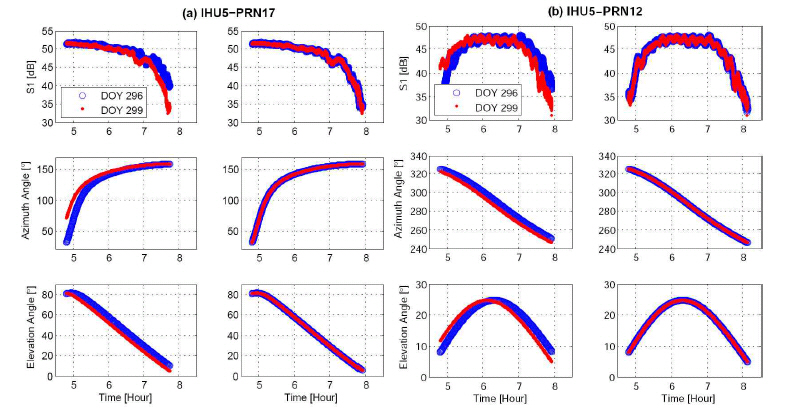
Process of GPS signal strength comparison reflecting orbital period
Fig. 9는 개활지환경에서 PRN 4번 위성의 신호세기와 궤도 를 비교한 결과를 나타내고, Fig. 10은 난수신환경에서 PRN 25번 위성의 비교 결과이다. 각각의 그림에서 (a)는 시간에 따 른 신호세기 변화를, (b)는 해당 시간 동안의 위성의 skyplot 을 나타낸다. 여기서는 앞서 설명한 과정을 따라 각각의 날짜 와 위성에 대한 재현시간을 적용하여 비교하였다. Fig. 9의 (a)와 같이 개활지환경인 IHU5에서는 위성이 서쪽에서 동쪽 으로 이동하면서 고도각이 증가했다가 감소함에 따라 신호세 기도 확연하게 증감하는 것을 확인할 수 있었다. 또한 8시 이 후의 신호세기는 8시 이전에 비해 변동 폭이 크게 나타나는 것이 확인되었다. 반면 난수신환경인 TEHE에서는 IHU5에 비해 신호세기 변화 폭이 전체적으로 크게 나타났고 특정 구 간에서 신호세기가 급격히 저하되는 것을 발견할 수 있었다 (Fig. 10).
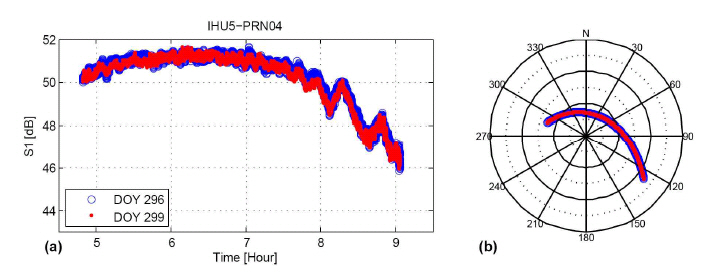
Characteristics of GPS(PRN04) signal strength in open-sky environment
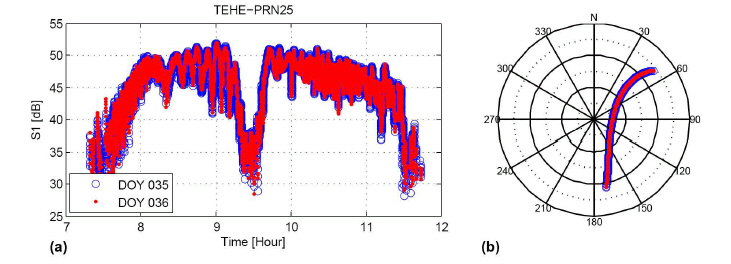
Characteristics of GPS(PRN25) signal strength in urban canyon environment
신호세기 변동 폭이 커지는 현상은 개활지환경에서는 저고 도의 위성에서, 난수신환경에서는 전반적인 데이터에서 발견 되었고 이 결과를 통해 이러한 신호들이 다중경로신호와 연관 이 있음을 짐작할 수 있었다. Fig. 9와 10을 통해 위성의 신호 세기는 위성의 고도각의 변화에 매우 민감하게 반응하며, 개 활지환경에서는 저고도 위성의 경우 지표면의 반사에 의해 신 호세기의 변동 폭이 커지고, 난수신환경에서는 주변에 신호 반사를 유발하는 요소가 많기 때문에 전체적으로 변동 폭이 큰 결과가 확인되지만 이러한 특성이 동일 궤도를 지나갈 때 거의 완벽하게 재현된다는 것을 발견할 수 있었다. 따라서 관 측환경에 따라 신호세기가 동일하게 변화하는 것을 확인하였 고, 신호세기를 이용한 다중경로신호 검출이 가능할 것으로 예상된다.
5. 결 론
GPS 위성의 신호세기 분석을 수행한 결과 난수신환경에서 는 개활지환경에서 관측된 신호세기와는 다른 경향을 나타내 는 것을 확인할 수 있었다. 난수신환경에서는 신호가 차폐되 어 입사되지 못하는 방향의 위성신호가 기록되는데, 동일 고 도의 위성들 중 차폐되지 않은 방향의 위성 신호에 비해 확연 히 신호세기가 저하되거나 불균일한 특성을 나타내는 것을 확 인할 수 있었다. 개활지환경과 난수신환경 모두 위성이 동일 궤도를 지날 때 거의 완벽하게 일치하는 신호세기 변화 특성 이 나타나므로 이러한 현상은 일시적인 것이 아닌, 관측 환경 에 따라 나타나는 결과로 판단되었다. 개활지환경에서 위성의 신호세기는 고도각이 낮아질수록 변동 폭이 점점 커지는 것이 확인되었고 이는 개활지환경에서 반사체 역할을 하는 지표면 에 의한 영향으로 판단된다. 또한 난수신환경에서는 전반적으 로 신호세기의 변동 폭이 크게 나타났으므로 주변 반사체에 의한 다중경로 신호가 이러한 결과를 유발했다고 판단되었다. 따라서 이 연구에서의 분석 결과를 통해 GPS 위성의 신호세 기는 다중경로신호를 검출할 수 있는 인자가 될 수 있을 것으 로 판단되었다. 향후 GPS 위성의 신호세기를 이용한 다중경 로 신호 검출 및 제거 기법이 개발되면 시내 모바일 단말기 사용자의 측위 정확도 개선에 크게 기여할 수 있을 것으로 기 대된다.
후 기
이 연구는 기상청 지진기술개발사업(CATER 2013-8090)의 지원으로 수행되었습니다.