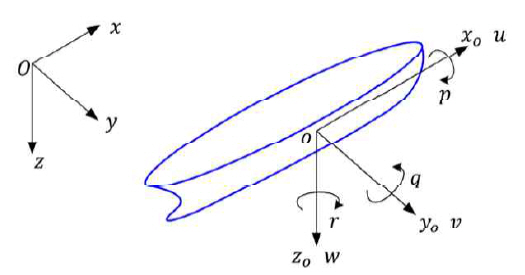
3.1. Coordinate systems and equations of motion
6 DOF equations of motion are defined in a body-fixed coordinate (
o -
x0y0z0), which is shown in Fig.
8. Commonly, positive directions of
x0 ,
y0 and
z0 are defined as the directions of forward, starboard, and downward. An Earth-fixed coordinate (
O -
xyz ) is used to express a ship’s trajectory and attitude. 6 DOF equations of motion are expressed using Newton’s 2
nd law. Environmental effects such as wind, wave, and current are not included in the external forces and moments in this paper.
Fig. 8
3.2. Model structures
Maneuvering motions are generated by changes in outboard motor angle. So, the rudder forces and moments which are generally applied to assess the maneuvering motions of a commercial ship are not considered as external force and moment. The subscripts
E ,
H ,
S and
T indicate external, hydrodynamic, hydrostatic and thrust, respectively.
The hydrodynamic and hydrostatic force and moment are modeled in Eqs. (
4)~(
5). The coefficients with an overline and tilde written in Eqs. (
4)~(
5) were estimated by analyzing straight running tests and turning tests, respectively. Hydrodynamic forces and moments consist of added mass and damping forces and moments.
3.3. Model parameters
The model parameters, written on the right hand sides of Eqs. (
4)~(
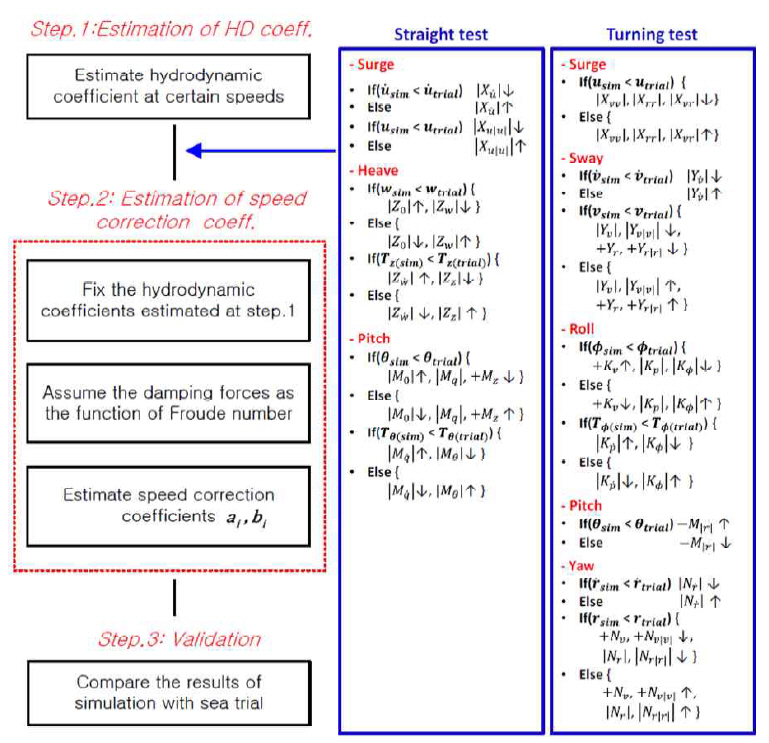
5), were obtained with trial and error methods based on specific characteristics of each hydrodynamic coefficient. In order to effectively tune the mathematical models and obtain those hydrodynamic coefficients, it was important to clearly identify the meaning of the hydrodynamic coefficients.
The trial and error method used to find the model parameters of hydrodynamic force is shown in Fig.
9. The 1
st step in finding a model parameter is to estimate the hydrodynamic and hydrostatic coefficients, which are included in Eqs. (
4)~(
5). In order to find those coefficients, the results of the sea trial listed in Table
3 were used. Correction for motion variables of surge, heave, and pitch in the time domain was possible with the simple
IF-THEN-ELSE tuning method.
Fig. 9
Simple trial and error method used to find model parameters
When tuning surge, sway, and heave coefficients in straight running tests, the important coefficients are Xu|u|, Z0 , Zz , M0 , Mz and Mθ . Z0 and M0 indicate the lift and moment. In the case of the turning test, surge velocity should be reduced when sway velocity and yaw angular velocity are increased. The surge hydrodynamic coefficients influenced by sway and yaw are Xvv , Xrr and Xvr . Especially, the added mass coefficient Xvr is the most sensitive coefficient, indicating the surge, sway, and yaw coupling effect. When considering the coupled effects sway, yaw and roll, while the ship is turning, are very important because of the coupled hydrodynamic coefficients Yr , Yr|r|, Nv , Nυ|υ| , Kv and Kr . So, the motion variables of sway, yaw, and roll differ depending on one another when tuning horizontal motion. The coefficients involved in turning are Yυ|υ|, Nr , Kv , Kp and Kφ . In the case of a commercial ship, the most important stability coefficient is generally a negative value. However, Nv of a planning hull becomes a positive value owing to stern dominancy. In order for a simulator to be stable, it is better for Nv to be a positive value.
Kv is also an important coefficient for the stability of a simulator. If Kv appears to be a large positive value, roll angle increases because it adversely affects decay roll motion. So, it is recommended that Kv has a small positive value for stability and inward roll motion during turning.
Regarding step 2 in Fig.
9, we assumed that the changes in hydrodynamic damping force and moment are quadratic functions with respect to Froude number. The reason why this assumption only applies to the damping forces and moments is because of the simplification of the mathematical models and the calculation time.
If the hydrodynamic and hydrostatic coefficients are obtained at a certain Froude number, those coefficients should then be fixed. That way, the effects of the changes in ship speed can be adjusted by correcting coefficients
a and
b in Eq. (
6). The speed correction coefficients
a and
b are obtained by repetitive tuning after confirming with the results of sea trials. If
a and
b are zero, hydrodynamic forces and moments are not changed by speed. Mathematically, damping force and moment increase as
a and
b increase if
Fn/
Fn0 is less than one. It is advisable to adjust
b when the effects of speed changes are strong.
where,
F_D(Fn)
Damping force vector reflecting speed change
F_D
Damping force vector at nominal Froude number
ai 1st order coefficient of the quadratic function
bi 2nd order coefficient of the quadratic function
Fn Froude number
Fn
0 Nominal Froude number at step. 1 in Fig. 9
Table 4
Nondimensional hydrodynamic and hydrostatic coefficients at Froude number 0.83
|
Surge |
Sway |
Heave |
|
|
|
|
Xu˙′
|
-6.50E-3 |
Yυ˙′
|
-3.88E-2 |
Zw˙′
|
-3.88E-2 |
|
Xu|u|′ |
-1.20E-2 |
Yp˙′
|
0.00E+0 |
Zq˙′
|
0.00E+0 |
|
Xvv′ |
-4.80E-4 |
Y|r˙′
|
0.00E+0 |
Z0′ |
-1.00E-4 |
|
Xrr′ |
-3.80E-4 |
Yv′ |
-1.05E-2 |
Zw′ |
-1.00E-1 |
|
Xvr′ |
-3.10E-2 |
Yp′ |
0.00E+0 |
Zq′ |
-5.00E-2 |
|
|
Yr′ |
9.00E-4 |
Zz′ |
-1.00E+0 |
|
|
Yv|v|′ |
-8.80E-2 |
|
|
|
|
Yr|r|′ |
1.00E-5 |
|
|
|
|
Yφ′ |
0.00E+0 |
|
|
|
|
|
|
Roll
|
Pitch
|
Yaw
|
|
|
|
|
Kυ˙′
|
0.00E+0 |
Mw˙′
|
0.00E+0 |
Nυ˙′
|
0.00E+0 |
|
Kp˙′
|
-5.56E-4 |
Mq˙′
|
-2.42E-3 |
Np˙′
|
0.00E+0 |
|
Kr˙′
|
0.00E+0 |
M0′ |
2.00E-1 |
Nr˙′
|
-9.22E-3 |
|
Kv′ |
1.06E-2 |
Mw′ |
-4.00E-3 |
Nv′ |
1.30E-4 |
|
Kp′ |
-1.80E-3 |
Mq′ |
-5.00E-1 |
Np′ |
0.00E+0 |
|
Kr′ |
-5.10E-5 |
Mw|w|′ |
1.00E-2 |
Nr′ |
-4.32E-2 |
|
Kr|r|′ |
0.00E+0 |
Mq|q|′ |
0.00E+0 |
Nv|v|′ |
0.00E+0 |
|
Kφ′ |
-8.95E-3 |
M|r|′ |
-4.00E-1 |
Nr|r|′ |
-7.08E-3 |
|
|
Mz′ |
7.35E+0 |
Nφ′ |
-1.00E-4 |
|
|
Mθ′ |
-5.00E-1 |
|
|
Table 5
Tuned speed correction coefficients
|
Motion |
i
|
Coefficient |
|
ai
|
bi
|
|
Surge |
1 |
1.05 |
1.00 |
|
Sway |
2 |
1.07 |
1.20 |
|
Heave |
3 |
1.00 |
1.00 |
|
Roll |
4 |
1.32 |
0.95 |
|
Pitch |
5 |
1.12 |
1.05 |
|
Yaw |
6 |
1.12 |
0.80 |









 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






