미지정수 후보 타당성 검정 기법간의 비교 분석
A Comparative Analysis of Performance of Ambiguity Validation Methods
Article information
Abstract
GNSS를 이용한 정밀측위에서 미지정수 결정은 가장 중요한 과정이다. 정확한 미지정수를 추정하는 경우에는 수 mm에서 수 cm 의 정밀한 측위결과를 가져오지만 부정확한 미지정수를 사용하는 경우에는 측위결과의 정확도와 정밀도를 보장할 수가 없다. 미지정수 결정 은 IR(Integer Rounding), IB(Integer Bootstrapping), ILS(Integer Least Squares) 등의 기법을 기반으로 수행할 수 있다. 이중에서 ILS는 이 론적, 실험적으로 가장 좋은 성능을 보여준다. 하지만 다른 기법들과 달리 ILS는 미지정수에 대한 후보를 검색하기 때문에 올바른 미지정수 를 판단하기 위한 타당성 검정이 필요하다. 본 논문에서는 타당성 검정 기법간의 실험적인 비교 분석을 수행한다. 실험에는 타당성 검정 기법 으로 자주 쓰이는 R-ratio, F-ratio, W-ratio가 사용되었다. 각 타당성 검정 기법의 성능을 정상동작, 검출, 미검출, 오검출로 나누어 평가하였 다. 실험결과로 각 타당성 검정 기법의 장단점이 분명하게 나타났으며, 이를 통해 적용환경에 따라 기법이 선택되어야 함을 확인하였다.
Trans Abstract
In high precision positioning systems based on GNSS, ambiguity resolution is an important procedure. Correct ambiguity leads to positioning results which have high precision between millimeters and centimeters. However, when the ambiguity is determined incorrectly, ensuring accuracy and precision of the positioning result is impossible. An ambiguity validation test is required to obtain correct ambiguity when ambiguity resolution is performed based on the ILS (Integer Least Squares), which shows the best performance in point of theory and experiment when compared with other methods such as IR (Integer Rounding) and IB (Integer Bootstrapping). Comparison between the candidates of the validation test is needed to judge ambiguity correctly, because ILS searches for candidates of integer ambiguity, unlike other methods which calculate only one integer ambiguity. We analyzed the experimental performance of ambiguity validation tests. R-ratio, F-ratio and W-ratio were adopted for analysis. The performance of validation tests was evaluated by classifying normal operation, detection, missed detection and false alarm. As a result, strengths and weaknesses of validation tests was showed to experimental. we concluded that validation tests must be selected according to environment.
1. 서 론
반송파를 이용한 정밀 측위의 성능은 미지정수 결정에 큰 영향을 받는다. 미지정수가 정확하게 결정되면 수 mm에서 수 cm 정도의 정밀한 위치해를 얻을 수 있지만 미지정수가 잘못 결정되면 위치해의 정밀도와 정확도를 보장할 수 없다. 미지 정수 결정은 Integer Rounding(IR), Integer Bootstrapping (IB), Integer Least Squares(ILS) 등의 기법을 기반으로 발전 되어 왔다(Blewitt, 1989; Dong and Bock, 1989; Teunissen, 1993). 이 중에서 ILS를 기반으로 하는 기법이 이론과 실험의 모든 측면에서 다른 기법들보다 좋은 성능을 보이기 때문에 많은 연구에서 언급되고 있다. 특히, Teunissen(1995)은 ILS 를 수행하기 전에 비상관화 과정을 이용하여 미지정수 결정 성공률 및 효율성을 비약적으로 발전시켰다. ILS를 기반으로 하는 미지정수 결정은 다음과 같은 단계로 이루어진다. 첫 번 째는 미지정수가 정수라는 제약조건을 실수영역으로 완화하 여 실수 미지정수(floating ambiguity)와 실수 미지정수의 공 분산행렬을 추정한다. 두 번째는 앞서 추정한 실수 미지정수 와 실수 미지정수의 공분산행렬로 표현되는 비용함수를 최소 화시키는 정수 미지정수(integer ambiguity) 후보를 정수영역 에서 검색한다. 세 번째는 정수 미지정수 후보에 대한 검정을 통해 최종적으로 미지정수를 결정한다. IR, IB를 기반으로 하 는 방법들은 하나의 정수 미지정수 후보를 계산한다. 이에 반 해 ILS는 검색을 통해 여러 개의 정수 미지정수 후보를 찾으 므로, 후보 간의 검정을 통해 신뢰성이 가장 높게 평가된 하나 의 후보를 최종적인 미지정수로 결정하거나 모든 후보가 신뢰 성이 같게 평가되는 경우에는 미지정수를 결정하지 못하는 상 황으로 판단한다. 후보에 대한 검정이 견고하지 못하면 잘못 된 후보를 최종적인 미지정수로 수용하거나 정확히 추정한 후 보를 기각하게 된다. 따라서 보다 정확한 판단을 내릴 수 있는 검정 기법을 사용하는 것도 ILS를 이용한 미지정수 결정에 주 요한 부분을 차지한다.
기저선의 거리와 같은 사전정보가 주어진 경우에는 정수 미지정수 후보를 이용하여 계산된 기저선의 거리와 사전정보 로 주어진 기저선의 거리 간 비교를 통해 후보에 대한 검정을 수행할 수 있다. 하지만 대부분의 경우 사전정보가 주어지지 않으므로 검정 과정은 주로 통계적인 측면에서 연구되었다. 이러한 연구결과로 R-ratio (Euler and Schaffrin, 1991), F-ratio (Frei and Beutler, 1990; Abidin, 1993), W-raito (Wang, 1998) 등이 제시되었다. 세 기법 모두 ILS의 비용함수 를 가장 최소화 시키는 후보와 그 다음으로 최소화 시키는 후 보를 가지고 검정에 필요한 통계치를 계산하는 공통점이 있 다. 하지만 임계치는 기법에 따라 사용자가 임의로 선택하거 나 원하는 신뢰수준에 따라 설정하는 측면에서 서로 상이하 다. Wang (2000)은 F-ratio와 W-ratio에 대해 실제 GPS와 GLONASS 위성신호를 이용하여 연구를 수행하였다. 연구 결 과로 타당성 검정 기법의 신뢰성과 이론적인 미지정수 결정 성공률 간 유사성과 차이를 비교하고 미지정수 결정 과정의 평가 지표로 사용될 수 있음을 보였다. 하지만 연구에서 이용 한 실제 신호의 길이는 25분으로 결과를 보편화하기에는 한계 가 있으며 F-ratio와 W-ratio에 대한 성능 비교는 이루어지지 않았다. 한편, 다른 연구에서 F-ratio와 W-ratio의 성능 비교 를 수행했지만 시뮬레이션한 신호를 사용하였다(Lee and Lee, 2004).
본 논문에서는 자주 활용되는 검정 기법인 R-ratio, F-ratio, W-ratio에 대해 실제 위성신호를 이용하여 실험적인 성능 비교 및 분석을 수행한다. 2절에서는 미지정수 결정 시 에 코드와 반송파를 이용한 시스템 모델에 대해 간략하게 기 술하고 3절에서는 각 검정 기법의 통계치 계산 방법 및 임계 치 설정 방법에 대해 설명한다. 4절에서는 실험환경에 대해 기술하고 수집한 실측치를 LAMBDA (Least Squares AMbiguity Decorrelation Adjustment) 기법을 이용해 구성한 미지정수 결정 플랫폼의 입력으로 사용하여 각 검정 기법의 성능을 분석한다. 5절에서는 성능 분석 결과를 바탕으로 실제 환경에서 각 검정 기법의 성능에 대한 결론을 내린다.
2. 시스템 모델
미지정수 결정 과정에서 실수 미지정수와 실수 미지정수의 공분산을 구하는 과정은 일반적으로 칼만필터 또는 최소자승 법(Least squares)을 이용한다. 둘 중 어느 방법을 사용해도 각 검정 기법의 통계치 계산에는 차이가 없으나 표현의 간략 화를 위해 본 논문에서는 최소자승법을 사용한다.
코드와 반송파를 이용하는 경우에 시스템 모델은 다음과 같이 Gauss-Markov 모델로 표현한다.
여기서 y는 이중차분된 측정치와 선형화 지점에서 계산치의 차이, B는 기저선에 대한 디자인 행렬, b는 기저선에 대한 미 지수 벡터, A는 미지정수에 대한 디자인 행렬, a는 미지정수 에 대한 미지수 벡터, e는 측정잡음, N(μ,σ2 )는 평균 μ, 분산 σ2를 가지는 가우시안 분포, Qρ는 이중차분된 코드 측정치의 공분산행렬, QΦ는 이중차분된 반송파 측정치의 공분산행렬, blkdiag (•)는 괄호 안의 행렬을 대각선 방향의 블록 행렬로 가지는 행렬이다. 가중최소자승법(Weighted least squares)을 이용하여 미지수에 대한 추정치를 구하면 다음과 같다.
여기서 Qy – 1은 (blkdiag (Qρ,QΦ ))– 1 ,
여기서
여기서
여기서 ƒ는 자유도로 측정치 수에서 미지수의 개수를 뺀 값이 다. 정수 미지정수 후보 검색은 위에서 추정된 실수 미지정수
여기서
3. 미지정수 검정 기법
이번 절에서는 각 미지정수 검정 기법에 대해 통계치의 계 산 및 임계치 설정에 대해 설명한다. 기본적으로 모든 기법에 서 식 (6)으로 표현되는 비용함수를 가장 최소화시키는 미지 정수 후보(이하 ǎ1)와 두 번째로 최소화시키는 미지정수 후보 (이하 ǎ2)의 잔차가 통계치 계산을 위한 입력으로 들어간다. 즉, ǎ1과 ǎ2가 통계적으로 차이를 가지는지 판단하는데 초점 이 맞추어져 있다.
3.1. R-ratio
R-ratio는 통계치의 구성이 가장 간단하기 때문에 자주 이 용되는 검정 기법 중 하나로 통계치가 다음과 같이 구성된다.
여기서 ri는 i번째 후보에 대한 추정 잔차의 제곱합이다. 통계 치분포가 종종 피셔 분포로 근사되어 다루어지기도 하지만 수 학적으로 특정한 분포를 따른다고 밝혀진 바는 없다. 따라서 임계치를 사용자가 임의로 설정해야 한다. 본 논문에서는 ‘2’ 로 설정한다(Euler and Landau, 1992).
3.2. F-ratio
R-ratio와 더불어 많이 사용되는 검정 기법으로 R-ratio의 통 계치에 최소자승법의 잔차의 제곱합 Ω0도 같이 고려된 형태 의 통계치를 사용한다.
R-raito와 마찬가지로 특정한 분포를 따른다고 밝혀진 바가 없다. 임계치는 R-ratio와 마찬가지로 사용자가 임의로 설정 해야 한다. 본 논문에서는 ‘2’로 설정한다(Euler and Landau, 1992).
3.3. W-ratio
W-ratio는 R-ratio와 F-ratio가 특정한 분포를 따르지 않는 단점을 보완하기 위해 연구된 기법으로 W-ratio의 통계치는 다음과 같이 표현된다.
여기서 Qd는 ǎ1 과 ǎ2에 의한 잔차간의 차에 대한 분산, δ2는 분산인자이다. 사용하는 분산인자에 따라 W-ratio의 통계치의 분포 특성이 달라진다. 본 논문에서는 앞서 구한 사후분산인 자 sˆ 2 0를 이용한다. 사후분산인자를 사용하는 경우 W-ratio의 통계치는 student-t 분포를 따른다고 알려져 있다(Wang, 1998). 따라서 임계치는 student-t 분포에서 원하는 신뢰수준 에 따라 결정한다.
4. 실험 결과 및 분석
4.1. 실험 환경
실험을 위한 측정치로 Fig. 1과 같이 대전 선박해양플랜트 연구소 A지점과 B지점에 설치된 안테나에서 2012년 3월 23일 18:30분부터 24일 18:20분까지 수집한 데이터를 사용했다. L1 코드, L1 반송파, L2 코드, L2 반송파 측정치를 사용하였으며, 이중 차분을 위한 기준위성은 매 에폭에서 앙각이 가장 높은 위성을 선택했다. Fig. 2는 실험 구간동안의 A지점에서 측정 한 가시위성의 앙각이며 기준위성의 변화는 Fig. 3과 같다. 실 험에 사용된 안테나의 위치와 데이터의 설정은 각각 Table 1 과 Table 2에 정리하였다. 기저선 길이가 약 220m로 짧기 때 문에 이온층과 대류층 지연에 대한 보정은 따로 하지 않았다. 실수해 xˆ 의 추정은 매 에폭마다 가중최소자승법을 수행하였 고, 정수 미지정수 검색에는 LAMBDA 기법을 사용하였다.

The position of test stations
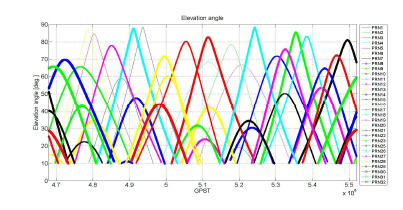
Elevation angle at A
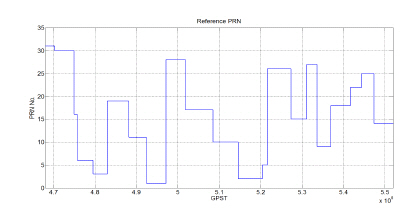
PRN of reference satellite

Information of Test station

Data description
4.2. 결과 분석
각 검정 기법을 비교 분석하기 위해 Table 3과 같은 기준으 로 정상 동작(Normal Operation, NO), 검출(Detection, D), 미 검출(Missed Detection, MD), 오검출(False Alarm, FA)을 ǎ1 이 실제 미지정수와 일치여부와 검정 기법 통과 여부로 구분 하였다. ǎ1이 실제 미지정수와 일치할 때 검정 기법에서도 ǎ1 이 제대로 추정된 값이라고 판단하여 통과시키는 경우에는 정 상 동작, ǎ1이 실제 미지정수와 불일치함에도 불구하고 검정 기법에서 ǎ1이 제대로 추정된 값이라고 판단하여 통과시키는 경우는 미검출, ǎ1이 미지정수와 일치함에도 불구하고 검정 기법에서 ǎ1이 제대로 추정된 값이 아니라고 판단하여 통과시 키지 않는 경우는 오검출, ǎ1이 실제 미지정수와 불일치할 때 검정 기법에서 ǎ1이 잘못 되었다고 판단하여 통과시키지 않는 경우는 검출이라고 하였다.

Criteria for comparison of validation test
타당성 검정 기법의 성능은 다중경로오차, 가시위성의 수, 측정치에 대한 공분산행렬 등 많은 요인에 의해 영향을 받는 다. 본 논문에서는 실제 신호를 이용하므로 앞에서 열거한 다 양한 요인들에 대한 영향을 평가하기 어렵다. 따라서 공분산 행렬의 영향에 대해 각 검정 기법의 성능을 평가하였다. 공분 산행렬에 의한 영향은 각 측정치에 대한 표준편차를 고정한 경우와 앙각에 따라 다르게 설정한 경우로 나누어 실험하였 다.
모든 실험에서 R-ratio와 F-ratio의 임계치는 2로 설정하였 다. W-ratio는 통계적인 검정 절차를 수행할 시 일반적으로 많이 사용하는 신뢰수준(Confidential Level, CL) 95%와 99% 에 대해 임계치를 설정하였다.
4.2.1. 공분산행렬의 표준편차를 고정한 경우
측정치의 공분산 행렬은 다음 식과 같이 주었다.
여기서 σ는 각 측정치에 대한 표준편차로 후처리를 통해 얻 은 잔차의 표준편차를 이용하였다. 표준편차는 L1 코드는 30cm, L2 코드는 27cm, L1 반송파는 2.5mm, L2 반송파는 2.6mm로 설정하였다. DD는 이중차분 연산자를 나타낸다. Fig. 4는 실제 미지정수로 기 측정된 정밀위치를 이용하여 구 한 값이다. Fig 5는 어떠한 미지정수 타당성 검정 기법도 적 용하지 않고 공분산행렬의 표준편차를 고정했을 때 L1과 L2 미지정수 추정결과이다. Fig. 6는 Fig. 4의 실제 미지정수와 Fig. 5의 추정된 미지정수 간의 차이를 나타낸다. 총 84001 에 폭에서 ǎ1이 실제 미지정수와 일치하는 경우는 83299 에폭으 로 실험적인 미지정수 결정 성공률은 99.16%로 산출되었다. Fig. 5의 결과에 각 검정 기법을 적용했을 때 성능에 대해 정 리한 결과는 Table 4와 같다. Table 4에는 각 기법마다 정상 동작, 검출, 미검출, 오검출이 발생한 에폭수와 검정을 수행한 전체 에폭수의 비율을 계산해 놓았다. 각 기법 간의 많은 차이 가 보이지는 않지만 정상 동작과 검출을 수행한 횟수가 많은 순서대로 정리하면 W-ratio(신뢰수준 95%), R-ratio, F-ratio, W-ratio(신뢰수준 99%)의 순서로 나열되었다. 정상동작(NO) 이나 검출(D)이 수행된 경우는 ǎ1에 대한 판단을 제대로 한 것이므로 W-ratio(신뢰수준 95%)가 가장 좋은 성능을 보인다 고 판단할 수 있다. 한편, 미검출(MD)은 ǎ1이 잘못 되었음에 도 불구하고 검정 기법을 통과하는 경우이므로 측위 성능에 악영향을 미치게 된다. 미검출을 수행한 횟수가 적은 순서대 로 정리하면 W-ratio(신뢰수준 99%), F-ratio, W-ratio(신뢰 수준 95%), R-ratio의 순서로 나열되었다. 따라서 미검출에 대해 W-ratio(신뢰수준 99%)가 가장 좋은 성능을 보였다.
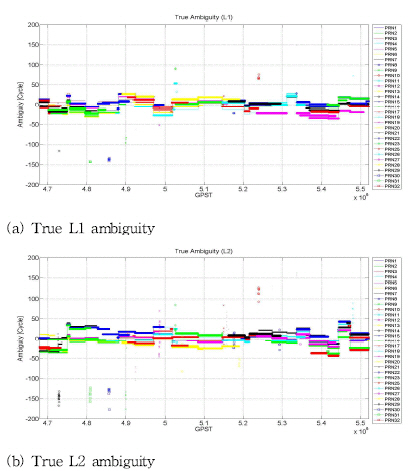
True ambiguity
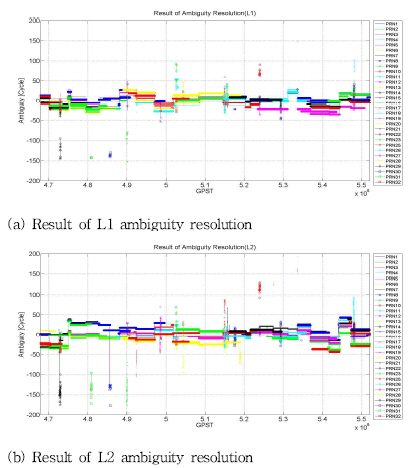
Result of ambiguity resolution for fixed standard deviation on covariance matrix
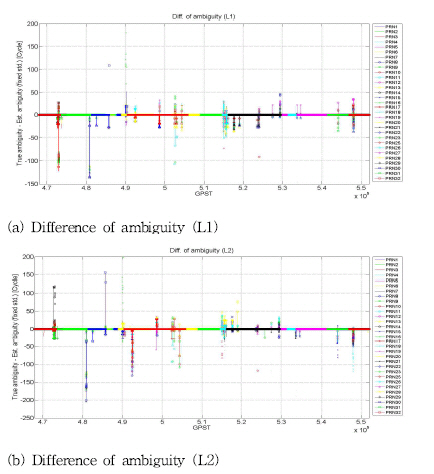
Difference of ambiguity between true ambiguity and estimated ambiguity (fixed standard deviation)

Result of validation test for fixed standard deviation on covariance matrix
4.2.2. 공분산행렬의 표준편차를 앙각에 따라 설정한 경우
앙각에 따라 표준편차를 설정한 공분산 행렬은 식 12의 각 측 정치의 표준편차 σ에 1/sin (el )를 곱하여 생성했다. Fig 7는 어떠한 미지정수 타당성 검정 기법도 적용하지 않고 공분산행 렬의 표준편차를 앙각에 따라 설정했을 때 L1과 L2 미지정수 추정결과이다. Fig. 8는 Fig. 4의 실제 미지정수와 Fig. 7의 추 정된 미지정수 간의 차이를 나타낸다. 총 84001에폭에서 (ǎ1)이 실제 미지정수와 일치하는 경우는 83335 에폭으로 실험적인 미지정수 결정 성공률은 99.21%로 산출되었다. Fig. 7의 결과 에 각 검정 기법을 적용했을 때 성능에 대해 정리한 결과는 Table 5와 같다. 앙각에 따라 표준편차를 설정한 영향으로 미 지정수 결정 성공률이 약 0.05%P 증가하였다. 이에 따른 영향 으로 모든 검정 기법에서 정상동작에 대한 횟수가 증가하였 다. 이러한 결과는 측정잡음의 크기가 일반적으로 앙각에 반 비례하는 특성에서 나타나는 것으로 판단된다. 정상 동작과 검출을 수행한 횟수를 더해서 비교하면 R-ratio, W-ratio(신 뢰수준 95%), F-ratio, W-ratio(신뢰수준 99%)의 순서로 나열 되어 R-ratio가 가장 좋은 성능을 보인다고 판단할 수 있다. 표준편차를 고정한 경우에는 W-ratio(신뢰수준 95%)가 가장 좋은 성능을 보였지만 각 경우에 대해서 R-ratio와 W-ratio (신뢰수준 95%)의 성능 차이는 약 0.02%P로 극히 작은 차이 를 보였다. 따라서 공분산행렬에 상관없이 정상동작과 검출에 대한 성능은 R-ratio와 W-ratio(신뢰수준 95%)가 큰 차이를 보이지 않았다. 한편, 미검출에 대한 성능은 W-ratio(신뢰수 준 99%), F-ratio, W-ratio(신뢰수준 95%), R-ratio의 순서로 나열되어 W-ratio (신뢰수준 99%)가 가장 좋은 성능을 보였 고, 표준편차를 고정한 경우와 동일한 결과를 나타냈다.
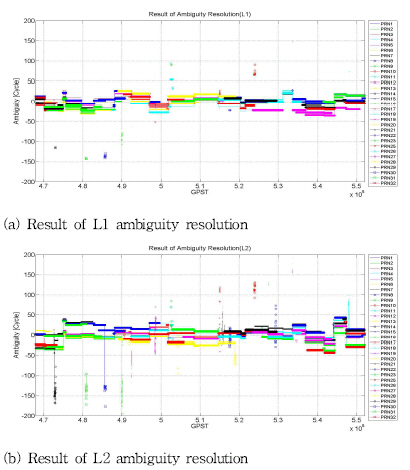
Result of ambiguity resolution for variable standard deviation on covariance matrix

Difference of ambiguity between true ambiguity and estimated ambiguity (variable standard deviation)

Result of validation test for variable standard deviation on covariance matrix
5. 결 론
본 논문에서는 미지정수 후보에 대해 타당성을 평가하는 검정 기법에 대해 비교 분석하였다. 구성의 간단함으로 인해 많은 논문에서 R-ratio 또는 F-ratio가 사용되고 있다. 하지만 통계치가 일정한 분포를 따르지 않기 때문에 임계치를 이론적 인 배경없이 사용자가 임의로 설정해야 하는 단점이 있다. 이 런 단점을 보완하기 위해 W-ratio가 제안되었다. 통계치 계산 에 사후분산인자를 입력으로 사용하는 경우에 W-ratio는 student-t 분포를 따르며 이 때 임계치는 원하는 신뢰수준에 따라 설정할 수 있다. 이 세 가지 검정 기법의 성능 비교를 위 해 실제 신호를 가지고 실험을 진행하였다. 실험 결과로 공분 산행렬의 표준편차를 고정했을 때보다 앙각에 따라 설정한 경 우에 전체적으로 검정 기법의 성능이 향상되는 것을 확인하였 다. 정상동작과 검출에 대한 성능은 표준편차를 고정한 경우 에는 W-ratio(신뢰수준 95%), 표준편차를 앙각에 따라 설정 한 경우에는 R-ratio가 가장 좋은 성능을 보였고, W-ratio(신 뢰수준 99%)는 모든 경우에 대해 가장 안 좋은 성능을 보였 다. 한편, 실제 측위 성능에 악영향을 줄 수 있는 미검출에 대 한 성능은 모든 경우에 대해 W-ratio(신뢰수준 99%)가 가장 좋은 성능을 보였으며, R-ratio가 가장 안 좋은 성능을 보였 다. 정상동작과 검출에 대한 성능과 미검출에 대한 성능이 서 로 반비례하는 특징을 보이므로 적용환경에 따라 적절한 기법 의 선택이 필요하다.
이번 연구에서 공분산행렬의 표준편차를 앙각에 따라 설정 한 경우에 실험적인 미지정수 결정 성공률 및 정상동작과 검 출에 대한 성능이 향상되는 것을 보였다. 하지만 미검출에 대 한 성능은 저하되었다. 이러한 현상은 실제 신호의 측정잡음 의 크기가 대체적으로 앙각에 반비례하지만 실험에 사용된 공 분산행렬과 모든 구간에서 완벽히 일치할 수는 없기 때문에 나온 것으로 추측된다. 추후에는 공분산행렬에 대해 추정 기 법을 사용했을 때 타당성 검정 기법의 성능을 분석할 것이다.
후 기
본 연구는 국토교통부 교통물류연구사업의 연구비지원 (06 교통핵심A03)에 의해 수행되었습니다.