인적요인을 고려한 연안해역 위험도 평가모델 비교·분석
Comparison and Analysis on Risk Assessment Models of Coastal Waters considering Human Factors
Article information
Abstract
국제기구에서 제시해 온 해양사고 예방대책은 주로 선박의 구조 및 복원성 강화, 선원의 교육․훈련, 해상교통환경 개선에 중점을 둔 것이었다. 해양사고통계를 분석한 결과, 사고는 주로 연안해역에서 인적요인에 의해 발생하였다. 이에 기존의 사고예방대책들이 통계분석 결과에 호응하는지 검토하기 위해 사고조사기법인 SHELL모델에 대입하였다. 결과적으로 연안해역에서 인간과실을 방지하기 위해서는 선박 운항자와 항행여건 사이의 상호작용에 대한 인간공학적 접근이 필요함이 도출되었다. 이를 위해 인간의 의사결정 메커니즘으로써 라스무센의 SRK 피라미드, 사고로 표현된 해상운송시스템의 붕괴에 관한 미국 연안경비대 등의 조사 지침서, 그리고 위험성평가모델인 IWRAP, PAWSA, ES모델, PARK모델과 NURI모델의 장단점을 검토하였다. 그 결과, 비록 기존의 위험성 평가모델은 항만이나 접근수로에서 유효성 이 인정되었다고 하나 연안해역에서는 보완이 필요하며, 선박운항자가 직관적으로 해역의 상대적 위험도를 인식할 수 있도록 위험표시도를 발간할 필요가 있으며 이를 위해 선박운항자가 느끼는 정성적 위험도를 정량적으로 표시하기 위한 새로운 한국형 모델의 개발 필요성을 제안 하였다.
Trans Abstract
For the prevention of marine casualties, international bodies have mainly focused on strengthening ship's stability and design, maritime education and training, and improving maritime traffic environment. Statistics analysis on marine casualties showed that most of casualties occurred in coastal waters, especially by human elements. In order to review the conformity of existing prevention measures with the result of the statistics analysis, the IMO's SHELL model was applied to the established measures. As a result, ergonomic approaches were needed for the prevention of human errors in coastal waters, so that the priority should be given to the interface between ship's operator and navigational environment. For this study, Rasmussen's SRK pyramid, which showed decision making mechanism of human, and the US Coast Guard's investigation manual on marine casualties concerning the collapse of safe maritime transportation system were reviewed, and the merits and demerits within the risk assessment tools such as IWRAP, PAWSA, ES model, PARK model, and NURI model were also studied. Although the effectiveness of the existing risk assessment models was proved in ports and approaching channels, it is concluded that the need of new models for converting Korean seafarers' qualitative risk to quantitative risk was proposed so as to print hazard maps which make seafarers instinctively recognize comparative hazard levels of coastal waters.
1. 서 론
국제연합(UN)은 해운․조선 등 해사산업이 세계경제에 기 여하는 바를 기리기 위해 1978년부터 매년 9월 마지막 주 중 하루를 세계 해사의 날(World Maritime Day)로 운영하고 있 다. 이는 국제 교역의 대부분을 담당하는 해상운송시스템이 세계 문명의 발전을 견인해왔다는 UN의 인식을 기초로 하고 있다. 따라서 통신과 교통의 발달로 더욱 좁아지는 지구촌에 서 해상운송시스템의 취약점은 대형 해양사고의 발현뿐만 아 니라 세계 문명의 발전을 저해할 수 있기 때문에 꾸준히 연 구․개선되어야만 한다.
해상운송시스템의 개선을 위해 우리 사회가 투입할 수 있 는 인적․물적 자원이 유한하기 때문에 어느 분야에 우선적으 로 투자해야 효율적인지 식별해 내기 위한 방안으로 해양사고 통계분석을 들 수 있다. 사고는 시스템 실패로 말미암은 것이 므로 유의미한 결함을 파악해 낼 수 있기 때문이다.
표 1에 따르면 지난 5년간 영해 이원에서 발생한 해양사고 가 17.4%이며, 영해 이내에서 사고가 총 82.6%임을 알 수 있 다. 따라서 지리적으로는 연안해역에 주목해야 한다고 결론지 을 수 있다.

Marine Casualty Area of Korea(KMST, 2015) (Unit: case)
표 2는 지난 5년간 재결을 분석한 것이며, 운항과실로 묶 인 사고는 인적요인(human factor)에 의한 사로로 분류된다. 그리고 비인적요인 해양사고로 분류되는 기상 등 불가항력 (2.5%), 항해원조시설의 부적절(0.2%), 선체 기관 설비결함 (2.9%), 전선노후 등(1.7%), 기타(2.5%) 등을 제외하면 약 90%가 인적요인과 관련된 사고로 분류될 수 있다.

Marine casualty cause of Korea(KMST, 2015)
결론적으로, 지리적 대상으로서는 연안해역에 80% 이상을, 사고의 원인으로는 인적 요소에 의한 사고 예방을 위해 90% 이상의 가용 자원이 할당되야 하는 것으로 분석된다.
이에 본 연구는 상기 통계분석에서 도출된 사고 위험성이 높은 연안해역에서 인적 요소에 의한 해양사고를 예방하기 위 한 기존의 국내외 대응책이 적정한지 검증하였다.
이를 위해 인적과실을 야기하는 선박운항자와 연안해역이 라는 위험도가 높은 항행여건 사이에 존재하는 흠결을 찾아내 고 치유하기 위한 조치가 국제기구나 연안국 정부에서 적정하 게 개발되었는지 검토하고자 한다. 이를 위해 IMO가 제시하 는 해양사고 조사기법을 검증기법으로 사용해 보고자 한다.
따라서 사고 예방을 위한 인간의 의사결정 원리가 적정하 게 작동되도록 지원하기 위해 연안해역의 위험도를 측정․평 가하여야 하며, 위험도 평가기법은 IWRAP, PAWSA, ES모 델, PARK모델, NURI모델을 대상으로 검토하였다.
해외에서 만들어진 평가모델은 국내 운항환경에서는 오차 를 보인다는 Kim et al(2011)과 Kim et al(2012)을 반영하여 향후 우리나라의 연안해역에서 선박운항자가 느끼는 주관적 위험도를 객관적으로 표현해 낼 수 있는 한국형 모델개발을 위한 위험요인을 제안하고 후속 연구의 필요성을 제시하고자 한다.
2. 의사결정구조와 안전시스템
2.1 해양사고 발생 메커니즘
시스템이란 전체가 일정한 기능을 지니는 것이며, 일반적으 로 인과관계, 논리관계, 자연법칙 등의 상호관계를 지닌 요소 로 구성된다. 요소란 시스템의 부분 혹은 성분을 나타내는 것 이다(Kim H. T. et al, 2012).
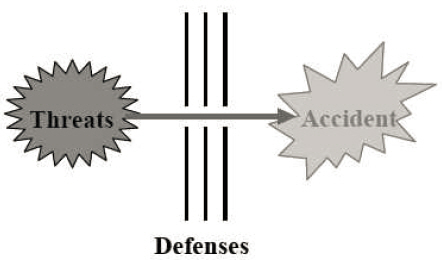
해상운송시스템에서 사고란 해양사고를 일으키는 별도의 시스템이 있는 것이 아니라 그림 1과 같이 해양사고를 방지하 기 위한 여러 방어막들(defences)로 구성된 안전시스템이 붕 괴(failure)된 것으로 표현된다.
Accident provoking mechanism(USCG, 2008)
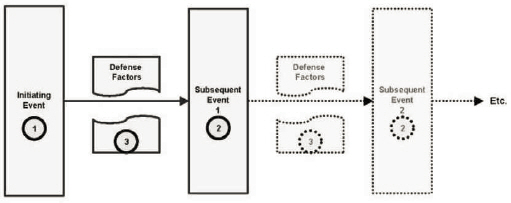
사고 발생을 시계열적으로 볼 때 그림 2와 같이 첫 번째 발 생한 일(Initiating Event, IE)로서 기대하지 않은 부정적인 결 과가 있어야 한다. 두 번째는 연이어 발생한 기대하지 않은 일 (Subsequent Event, SE)로서 첫 번째 발생한 일과 연계된 것 이어야 한다. 이러한 단계별 구분은 사건의 단계별로 필요한 방어막이 무엇이었는지를 찾아내어 재발방지 대책을 수립하 는데 유용한 과정이라고 할 수 있을 것이다.
Accident evolving flow(USCG, 2008)
2.2 라스무센의 SRK 피라미드
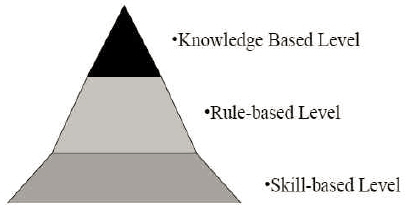
1981년에 라스무센(Rasmussen)은 사람들은 문제에 맞닥트 리면 각 상황을 분석하고 최적의 답을 찾아내려고 하는 것이 아니라 미리 준비된 패턴에 따라 행동을 선택하려고 시도한다 는 심리학적 결론을 발표하였다. 1986년에는 그림 3과 같이 인간의 행동을 세 가지 단계별로 도식화하였는데 ①기술기반 활동 (Skill-based performance, SB), ②규정기반 활동(Rule-based performance, RB), ③지식기반 활동(Knowledge-based performance, KB)이며, 이를 라스무센의 SRK 피라미드라고 한다.
Rasmussen's pyramid(USCG, 2008)
기초적 단계인 SB 수준의 결정은 생각할 필요도 없이 처리 할 수 있는 익숙한 상황을 뜻한다. 중간 단계인 RB 수준은 행 동을 하기 전에 선택의 과정을 거치는 단계이다. 인간은 거대 한 도서관과 같이 많은 규정들을 체득하고 있는데 이는 교육 을 통해 얻은 것도 있지만 대부분은 경험을 통해 얻은 것들이 다. 규정기반의 의사결정은 X라는 표시를 보면 Y라는 현상이 존재한다고 지각하는 인식 규정과, Y라는 현상이 있으면 Z라 는 행동이 적합하다고 판단하는 행동규정을 갖는 것이다.
최고 단계인 KB 단계는 어떠한 일의 결과를 파악하려고 적 극적으로 노력해서 최적의 일을 해야 하므로 최대한 주의를 기울이고 생각을 집중해야 하는 경우이다. 이러한 단계별로 필요한 주의를 다하지 않거나 상황을 실제보다 낮은 단계로 오판하는 경우에는 사고에 이르게 된다.
라스무센은 사람들이 기술기반의 작업을 매우 잘 해내며, 규정기반 상태에서도 적합한 인식규정과 행동규정을 선택해 나가지만, 지식기반의 작업은 서툴기 때문에 전혀 새로운 상 황과 맞닥트리면 초심자든지 전문가든지 똑같이 서툴 수밖에 없다고 한다.
2.3 사고를 유발하는 인적요인 분류
제임스 리즌은 1990년에 인간과실(Human Error)이라는 저 서에서 '일반적 과실 모델링 시스템(Generic Error Modeling System, GEMS)'을 제시하면서 사람이 과실을 일으키는 과정 을 체계적으로 살펴보았다.
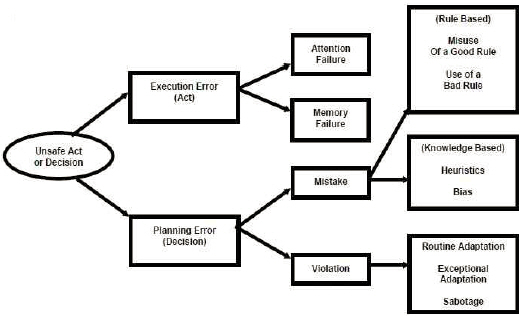
리즌에 따르면 사고발생의 기원에는 사람의 불안전한 행동 이나 결정이 자리 잡고 있다. GEMS는 SRK 피라미드의 어느 단계로부터 사고가 발현하였는지를 그림 4와 같이 분류하고 있다. 이러한 분류는 인간 의식의 어느 단계에서 문제를 일으 켰고 어떠한 조치를 필요로 하는지 파악하기 위한 분석의 도 구로 유용하기 때문에 IMO에서 인간과실 조사 기법의 하나로 채택하고 있다.
Human error analysis graphic(IMO, 1999a; USCG, 2008)
기술기반, 규정기반, 지식기반의 인식 단계별로 취해진 조 치가 부적절해 사고로 이어지는데 잘못된 행동은 실행과실 (execution error)이며, 잘못된 결정은 판단과실(planning error)로 분류한다.
2.4 업무수행에 영향을 미치는 요인분석
인적요인에 관하여 IMO는 1999년에 해양사고의 기여요소 로서 피로의 역할에 주목하고 관련사고로서 엑슨발데즈 좌초 사고를 들어 피로에 관한 지침을 개발한 바 있다(IMO, 1999b). 또한 IMO의 규정제정 절차에 적용하기 위하여 인적 요인 분석절차(Human Effect Analysing Process, HEAP)를 지침 으로 제공하고 공식안전성평가(Formal Safety Assessment, FSA) 기법에 관해서도 주목하고 있다(IMO, 2002). 그러나 해 상운송시스템 내에서 오작동한 인간의 역할을 살펴보기 위해 서는 1999년에 IMO가 채택한 인적요소 조사지침을 살펴 볼 필요가 있다.
IMO와 국제노동기구(ILO)는 인간과실 사고조사 실무를 위 해 1987년에 호킨스가 에드워드의 1972년 연구를 연구·수정하 여 발표한 SHELL모델을 제시하고 있다.
그림 5와 같이 인간(liveware)을 중심에 두고 상호작용을 하는 4개의 그룹으로 나누어 분석하는 이 모델은 인간 (liveware)이 장비나 선박(hardware), 운항지침과 같은 절차서 (software), 기상이나 시정 및 진동과 같은 물리적 환경 (environment), 다른 인간(liveware)과의 상호작용에 중점을 두고 있다. 이러한 분석의 틀에 국제기구나 정부의 안전대책 을 대입하고 정합성을 검토하고자 한다.

3. 해양사고 방지 시스템 분석
3.1 국제기구의 안전정책 평가
SHELL모델에 기존의 국제기구 안전대책을 대입하면 그림 6과 같다.
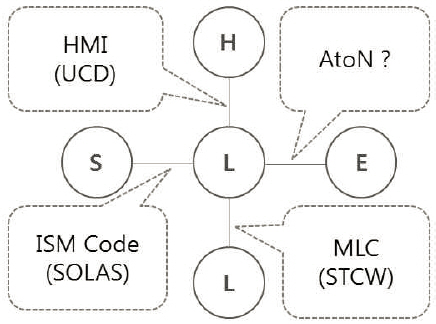
Instruments in relation to liveware
첫째, 중심에 있는 사람(liveware)과 주변의 사람(liveware) 의 관계를 규율하는 데는 해사노동안전협약(MLC)과 STCW 협약을 꼽을 수 있다. 둘째, 사람과 업무(software) 사이에는 절차서로서 ISM code를 꼽을 수 있다. 셋째, 사람과 기계 (hardware) 사이에는 인간과 기계의 인터페이스(Human- Machine Interface; HMI)를 향상시키기 위한 여러 방안과 ISO에서 채택하고 있는 사용자 중심의 설계(User Centered Design, UCD)를 꼽을 수 있다.
그러나 사람과 환경(environment)의 인터페이스 부분에서 는 적절한 규정을 찾을 수 없어 안전망의 결함으로 식별해 낼 수 있다. 여기서 환경이란 자연환경, 지리환경, 기반환경, 사회 정보환경, 교통환경 등 다양한 것들이 있을 수 있으나 해상운 송시스템 속에서 발생한 사람의 불완전한 의사결정을 관심대 상으로 하는 SHELL모델의 특성과 다른 요소와의 관계를 고 려할 때 사람이 직접 느낄 수 있는 외부적 환경으로서 교통환 경적인 관점으로 보아 이 연구에서는 운항환경이라고 하겠다.
이와 관련하여 IMO가 내 놓은 유사한 조치라도 찾아본다 면 선박통항관제시스템(VTS)과 통항분리제도(TSS)일 것이 다. VTS는 선박운항자가 항행환경이 좋지 않은 곳에서 실수 를 하더라도 그 실수를 이중으로 체크하는 역할을 수행한다고 할 수 있으며, TSS는 선박의 통항이 빈번한 해역에 통항로를 설정함으로써 선박이 좌초나 충돌할 위험을 줄여준다고 할 수 도 있을 것이다.
그러나 VTS가 경계(lookout)에 집중해야 할 항해사에게 수 시로 보고의무를 지운다든지, TSS가 선박 통항을 오히려 집 중시킬 수 있다는 문제점이 적절히 해소되었는지에 관한 선결 과제를 갖고 있다. 이러한 종합적 검토 없이 실행된다면 오히 려 또 다른 위험을 야기할 수도 있기 때문에 선박운항자와 운 항환경간의 인터페이스에서 발생하는 사고를 예방하는 검증 된 수단으로 보기 어려울 수 있다.
3.2 효율적 사고 저감을 위한 과제
연안해역은 사고빈도가 높아 항행환경이 가장 열악한 해역 이라는 것을 통계를 통해 확인한 바 있다. 그리고 연안해역은 IMO의 관할 밖으로 진지한 검토가 없었다는 점을 인식하고, 운항자가 느끼는 교통환경적 위험성을 검토할 필요가 있다.
해상교통 위험성을 평가하는 방법은 실시간으로 주위 선박 에 대한 위험도를 평가하는 동적(dynamic) 평가방식과 항적 자료나 전문가 의견을 토대로 하는 정적(static) 평가방식으로 나뉘며, 정적 평가방법은 다시 정량적(quantitative) 방법과 정 성적인(qualitative) 방법으로 분류할 수 있다. 정량적인 평가 방법은 주로 항로 통항 데이터에 의해 산출하며, 정성적인 방 법은 전문가 그룹을 토대로 한 설문조사를 바탕으로 위험요소 별 가중치를 부여한다(Kim, 2015).
이러한 분류방식을 따르면 동적인 평가방법은 실시간 운항 중인 선박에서는 유용한 방법이지만 위험도(hazard map) 제 작과 같이 위험의 정도를 사전에 예측하여 공표하는 방법으로 는 적절하지 않기 때문에 정적인 평가 방식으로 위험도를 측 정하는 것이 적절하다고 보아야 한다. 따라서 국내․외의 정 적 위험도 평가모델을 대상으로 검토하고자 한다.
4. 해상교통 위험성 평가 모델 및 제도
4.1 국제항로표지협회의 해상교통 위험성 평가모델
국제항로표지협회(IALA) 수로 위험성 평가 프로그램 (IALA Waterway Risk Assessment Program, IWRAP)은 1970년대부터 개발이 시작되었으며 수로에서 충돌과 좌초 가 능성을 평가하기 위한 확률론적 방법론으로부터 발전되었다. IWRAP에서 사용하는 충돌 및 좌초빈도 식(1)은 후지(Fujii) 의 이론을 바탕으로 하고 있다(Peter, 2008).
여기서,
λ = 연간 해양사고 빈도(λCol: 연간충돌빈도, λGnd: 연간좌초빈도)
NG = 기하학적 사고 위험도(Geometric Number of Collision or Grounding Candidates)
PC = 인과 요소(Causation Factor)
현재는 개량형인 IWRAP Mk II로 명명된 툴이 사용되고 있고, 주요 국제항로에서 위험성 평가 기법으로 사용되어 널 리 알려진 프로그램이다. 그러나 이 프로그램은 수로의 기하 학적 형태와 교통량 등을 기반으로 해당 수로에서 정량적인 충돌과 좌초 확률 계산에 역점을 두어 다루고 있기 때문에 그 항로에서 선박운항자가 느끼는 주관적 위험에 대한 평가를 포 함하고 있지 않다는 한계가 있다(Kim et al, 2012).
4.2 미국의 해상교통 위험성 평가제도
미국연안경비대(USCG)의 항만 및 수로 안전성 평가(Ports and Waterways Safety Assessment, PAWSA) 기법은 주요 항만의 출입항로에 지정된 항로나 닻 정박지 등이 안전하게 설계되고 운영되어 선박운항에 장애가 없게 하려는 종합적인 검토기법이다(USCG, 2012).
평가 대상 수로와 관계있는 전문가들이 참가하는 PAWSA 는 다섯 단계의 평가과정으로 구성된다. 1~3단계까지 24개 요소의 위험성을 참석자의 경험에 비추어 주관적으로 평가한 다. 그리고 4단계에서는 3단계까지 발굴해 낸 위해요소에 안 전조치를 시행했을 경우에 감소한 위험성을 평가한다. 그 이 후에도 잔존하는 허용할 수 없는 수준의 위해요소에 대해서는 5단계에서 참가자의 의견을 요청하여 안전조치를 개발하고, 그런 안전조치들이 시행되었을 때 안전성을 재평가한다.
장점은 조사 대상 수로를 잘 아는 전문가들과 그 수로와 이 해관계가 높은 사람들이 참여함으로써 실질적인 위해요소를 식별해 낼 수 있다는 것인 반면, PAWSA 자체가 참여자들의 전문성이나 의견에 크게 의존하는 정성적 방법으로 분류할 수 있어 어떤 해역의 위험도를 다른 해역과 비교할 때 객관성을 담보하기 쉽지 않다는 단점이 있다.
4.3 일본의 위험성 평가 모델
일본은 한국과 유사한 해상교통 안전진단제도를 시행하고 있지만 한국과 달리 강제적 제도는 아니다. 일본의 ES (Environmental Stress)모델은 한국의 해상교통안전진단제도 에서 주로 사용되는 모델로서 선박운항자가 지형과 교통환경 으로부터 받는 스트레스의 정도를 정량적으로 표현하고 있다.
선박조종이 어느 정도 곤란한지를 측정하기 위해 ‘조선 가 능한 해역’과 ‘선박충돌 회피 가능 해역’으로 나눠 진행된다.
모델 계산식은 위험이 현실화되는 시간 동안 선박운항자가 느끼는 위험의 정도을 나타내기 위한 함수이며 식(2) 및 식(3) 과 같다.
여기서,
SJL: 조선환경 스트레스치
SJS: 교통환경 스트레스치
R: 좌초나 충돌 대상물까지 이격 거리
V: 자선의 속력 및 타선과의 상대속력
SJL값과 SJS값 어느 쪽도 0~1000 범위에서 주어지는 같 은 지표치로 표현되고 지표치와 그 허용 가능성의 관계를 검 토할 수 있는 공통의 평가기준을 갖는다. 두 스트레스치를 합 하여 종합환경 스트레스치(Aggregation of ES value, ESA)라 하고 개념은 그림 7과 같다(Park, 2007).
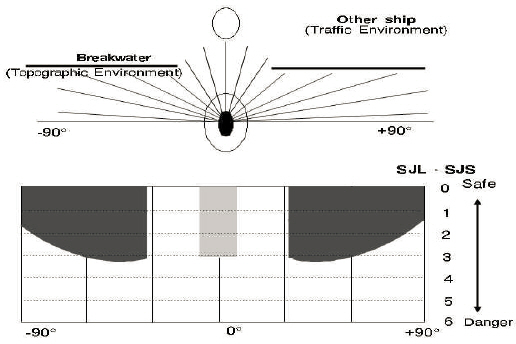
ESA Schematic figure(Park, 2007)
평가점수 합계는 조선환경 스트레스가 되는데 0에서 1,000 까지 범위로 나타내고 750이 넘으면 수용할 수 없는 수준으로 평가한다.
울산항에서 ES모델과 IWRAP을 비교 평가한 연구에 따르 면 ES모델이 한국 연안에서 완벽하게 적용되는 것은 아니며, 이는 한국 선박운항자들의 위험 인지도가 일본 선박운항자들 의 인지도와 달라 그 차이를 반영하고 있지 못하기 때문인 것 으로 분석하였다(Kim et al., 2011).
4.4 한국의 위험성 평가모델
4.4.1 PARK모델
PARK(Potential Assessment of Risk, a Korean Model that is being developed)모델은 한국 해기사들에게 설문조사 를 시행하여 선박운항자가 느끼는 위험도와 함께 한국 연안의 특징을 반영하여 연구를 한 결과로 수로에서 위험성은 선종, 총톤수, 길이, 폭, 당직항해사의 능력 등에 의존한다는 결과에 따라 수립된 모델이다(Park, 2007).
그림 8과 같이 교차하는 상황에서 타 선박과 이루는 조우 각도(Overtake, Head-on, Crossing(좌/우현, 045˚, 090˚, 135˚)) 와 거리에서 느끼는 선박운항자의 위험도를 7점 척도로 수집 한 자료를 분산분석과 다중비교분석으로 요인간 차이를 평가 하고 주관적 위험도 지표를 계산할 수 있는 모형을 구축한 것 이다. 이외에도 추월상태, 마주치는 상태, 조우한 선박이 나타 난 현측, 항만의 내측 또는 외측, 다른 선박과의 속도, 다른 선 박과 이격 거리와 속도차 등으로부터 평가지수를 마련하였다 (Heo et al., 2012).
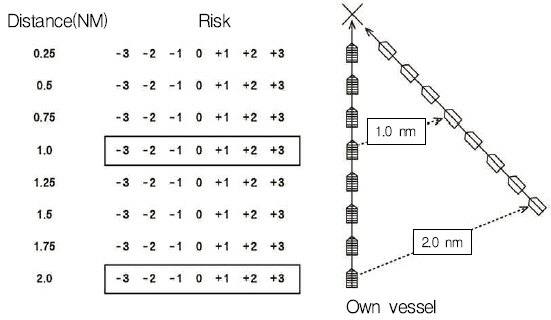
Example of survey form(Heo et al., 2012)
PARK모델의 신뢰도 검토를 위해 ES모델과 비교․검토가 진행되었으며, 현실 부합성 검토를 위해 과거 5년간 부산항에서 발생한 해양사고 자료와 비교하여 두 가지 결론을 도출하였 다. 첫째, 항만과 접근수로에서는 두 모델이 비슷한 결과를 나 타내었으며, 둘째, 연안에서 2~10 해리 이격한 수역에서는 PARK모델이 더욱 일관적인 결과를 보여 주었다(Nguyen, 2013).
이러한 결과는 각국의 연안을 항해하는 선박운항자들이 느 끼는 주관적 위험도 차이로 볼 수 있으며, 각국별로 적합한 평 가모델의 가중치를 별도 산정해야 한다고 추론할 수 있다.
4.4.2 NURI모델
NURI(Numeric Risk Assessment)모델은 위험도(Risk, R) 를 사고 가능성과 이로 인한 영향의 곱이라고 표현하는 전통 적인 방식을 식(4)와 같이 수용하고 있다(Lee, 2013).
여기서,
Cf: Frequency of Casualty
Cc: Consequence of Casualty
RI: Risk Index
FI: Frequency Index
CI: Consequency Index
그리고 5점 척도의 출현빈도 지수와 영향력 지수의 합으로 10점 척도의 위험지수를 이용하고자 식(5)를 이용한다. 5점 척 도를 사용함에 따라 5제곱의 매트릭스로 25가지 경우가 발생 하며 위험요소별 가중치를 곱해 통합위험도를 계산해 낸다. 가중치는 선박운항자들의 의견을 폭넓게 반영하여 분석적 계 층화 과정(Analytical Hierarchy Process, AHP)을 거쳐 정량화 된다.
NURI모델의 특징은 그림 9와 같이 대표적인 위험요소를 광범위하게 색인하고 재분류하기 위해 일본 해난방지협회 항 행안전대책 평가지침의 지표, PAWSA의 안전성 평가요소, 국 내 연안통항로의 해상교통 환경평가 연구 결과, 국내 해상교 통안전진단 제도의 진단항목 등을 망라하여 재분류함으로써 위험요소를 색인하고 해상교통전문가 집단의 폭넓은 의견을 수렴하여 각 위해요소별 가중치를 산정한 성과에 있다고 할 수 있다.
NURI모델의 완성도와 실용성 검증을 위해 목포항, 완도항 과 그 진입수로에서 위험도 평가를 실시하고 그 결과를 과거 해양사고 현황 및 정성적 평가를 수행한 선행 연구에서 분석 한 위험도 평가결과와 비교하였는데 높은 일치율을 보여줌에 따라 국내 해상교통환경에 대한 기존 정성적인 위험도 평가를 정량적 위험도 평가로 대체할 수 있는 모델이라고 할 수 있다 (Lee, 2013).
그러나 NURI모델은 연안해역과 같이 열린 해역에서는 아 직 유효성이 입증되지 않았다.
4.5 새로운 모델구성을 위한 위험요소 제안
상기 살펴본 모델들은 표 3과 같이 서로 같거나 다른 위험 요소를 바탕으로 위험성을 평가하고 있으며, NURI모델이 20 개, PAWSA가 24개, ES모델이 13개 요소를 채택하고 있다.

Comparison on risk factors of 3 countries
해양사고와 관련된 요소는 표 3의 22항에 표기한 바와 같이 NURI모델에서 9개, ES모델에서 2개, PAWSA에서 8개가 있다. 이 외에 세 모델의 공통적 위험요소는 바람, 조류, 시정, 통항 량, 교통류로 5개이다. NURI모델과 ES모델은 공통되는 5개 외에 조석, 파도, 항로표지를 추가로 공유하고 있다. NURI모 델과 PAWSA는 수심과 혼잡도를 공유하고 있다.
위험성 평가를 위한 위험요소의 선택은 객관적으로 측정 가능한 요소여야 하며, 유효성이 검증된 세 모델의 공통적 위 험요소는 객관성을 담보하고 있다고 보아야 한다.
그러나 해양사고는 해상운송시스템의 결함으로 발생한 결 과이므로 위험성 평가 시에 위험요소의 하나로 활용되는 것보 다 위험성 평가모델의 적합성을 평가할 때 사용되는 것이 바 람직하다고 보아야 하며, 이를 제외하고 남은 요소들은 NURI 모델이 12개, PAWSA가 16개, ES모델이 11개이다.
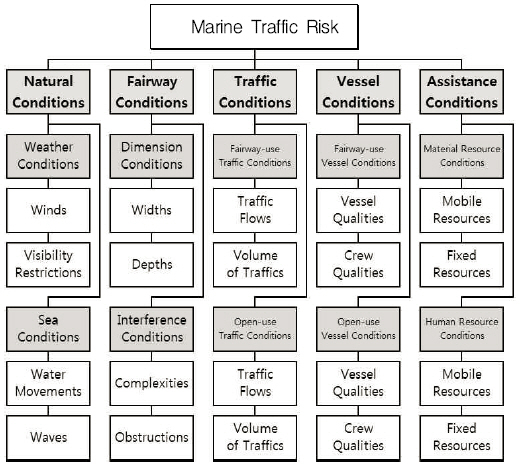
이렇게 식별된 위험요소를 성격이 같거나 유사한 것끼리 재분류하여 그림 10과 같이 16가지 요소로 구분할 수 있다.
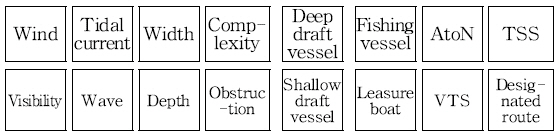
Marine traffic risk factors
그리고 AHP기법으로 가중치를 부여하고자 그림 11과 같이 구조화하였다. 이를 관계 전문가 대상으로 설문조사를 거쳐 정성적 위험성을 정량적 위험도로 변환하기 위한 가중치를 부 여함으로써 새로운 위험성 평가모델을 개발하는 기초가 될 수 있을 것이다.
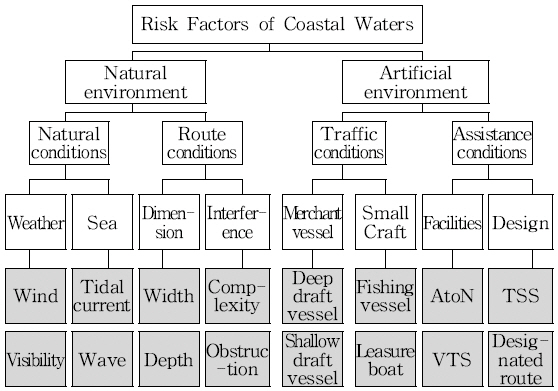
Marine traffic risk factors of coastal waters
5. 결 론
인간이 개입된 모든 시스템에서 인적요인에 의한 사고는 필연적인 것이다. 라스무센에 따르면 실존하는 문제에 부응하 는 적정한 수준의 의식이 작동되지 않는 경우에는 인적요인에 의한 사고로 이어질 수 있다. 해상운송시스템에서도 선박운항 자 또는 선내작업자를 중심으로 볼 때 상호작용을 하는 다른 작업자, 기계․장비, 운항환경, 작업여건이 사고의 원인으로 작용할 수 있기 때문에 적정한 안전대책을 필요로 한다.
IMO가 사고원인 조사기법으로 채택하고 있는 SHELL모델 로 상호작용하는 요인들을 거시적으로 분석하고 이러한 작용 을 조절할 수 있는 제도가 마련되어 있는지 분석해 보면 인간 (liveware)과 운항환경(environment) 사이의 상호관계를 조절 하기 위한 하부 시스템의 흠결이 발견된다. 이러한 결과는 해 양사고 원인 중에서 가장 높은 비율을 차지하는 것은 인간과 실이며 가장 사고가 빈발하는 곳은 연안해역이라는 통계분석 에 호응하는 결과이다. 그리고 대응방안을 제시해야 하는 직 접적인 관리책임은 연안해역을 관장하는 정부의 몫으로 남는다.
정부는 해역별 위험을 비교․평가하여 상대적 위험표시도 (hazard map)를 제공함으로써 선박운항자의 각성을 유도할 수 있을 것이다. 따라서 선박 측에서는 위험도가 높은 해역에 서는 그에 상응하는 대처능력을 간과하지 않을 수 있게 될 것 이다.
따라서 연안해역에서 인적요인에 의해 발생하는 사고를 줄 이기 위해서 과거 항적 데이터나 연안의 지리적 형태를 이용 한 정량적 방식으로 객관적인 위험요인을 찾아내고, 그 위험 도에 대한 선박운항자들의 주관적 의사를 반영하기 위한 모델 이 필요하게 된다.
주관적 의사는 라스무센의 SRK 피라미드에서 살펴본 바와 같이 같은 상항에서도 선박운항자의 교육․훈련의 정도 및 경 험에 따라 느끼는 위험도는 제각각 다르며, 숙련된 항해자라 할지라도 지식기반의 활동이 요구될 수 있고, 규정기반의 활 동에서도 잘못된 규정을 선택할 수 있는 인적요인에 의한 위 험을 함께 가지고 있기 때문이다.
이러한 관점에서, IWRAP은 수로의 기하학적 형태와 교통 량 등을 기반으로 해당 수로에서 정량적인 충돌과 좌초 확률 계산에 역점을 두어 다루고 있다는 한계를 갖고 있다고 볼 수 있다.
PAWSA는 전문가나 이해관계인이 참여하여 위해요소를 발굴하고 안전대책을 마련해 가는 주관적, 정성적 평가방식이 므로 객관적 데이터가 없는 항만이나 진입수로에서는 그 해역 을 잘 아는 전문가들의 진단을 거치기 때문에 유용한 제도로 활용될 수 있다. 다만, 해역별 위험도 비교평가에서는 객관성 을 담보하기가 쉽지 않다.
선박운항자가 느끼는 주관적 위험도의 객관화를 시도한 일 본의 ES모델과 한국의 PARK모델을 비교한 결과 나라별로 선박운항자가 느끼는 위험도에 차이가 있다는 것을 보여주고 있으며, NURI모델은 열린 해역에서 검증이 되지 않았다는 한 계가 있다.
따라서 연안해역에서 얻을 수 있는 객관적 위험요소를 식 별하고 이에 대한 선박운항자가 느끼는 위험도에 대한 설문을 통하여 가중치를 부여한 새로운 모델의 개발이 필요하다.
새로운 위험요인은 유효성이 검증된 기존 평가모델에서 채 택하고 있는 위험요소들 중에 해양사고와 관련된 요소를 제외 하고 유사한 요소끼리 재분류함으로써 16가지 요소로 나누어 분석적 계층화 과정에 적합하도록 체계화하였으므로, 향후 위 험요소별 정성적 자료를 정량적으로 변환하는 과정에 참여하 는 전문가와 이해관계자의 수를 늘려 가중치 평가를 더욱 정 교하게 조정함으로써 노출된 미비점을 보완하기 위한 추가 연 구가 필요할 것으로 판단된다.