Dynamic Positioning 선박들의 사고사례 분석
An Analysis on Incident Cases of Dynamic Positioning Vessels
Article information
Abstract
Dynamic Positioning System(DPS)은 동력, DP control 장치, DP 컴퓨터, 위치참조시스템(PRS), 센서, thruster 시스템 및 DP 운용 자(DPO) 7가지로 구성되어 있다. DP 선박은 이들 구성요소들에 문제가 발생하면 그 기능을 상실할 수 있는데 이러한 DP 선박의 위치손실사 고(Loss of Position, LOP)는 선주가 자발적으로 매년 IMCA에 보고하고 있다. 본 연구에서는 2001∼2010년까지 10년 동안 IMCA 보고된 DP 선박 관련사고 612건에 대한 분석을 바탕으로 DPS의 7가지 구성요소와 관련된 사고 원인을 파악하고 이들 중 높은 비율을 차지하는 요인의 정성적, 정량적 분석을 통한 DP 선박의 안전운항 방안을 모색하고자 한다. 10년 평균 가장 높은 비율을 차지한 DPS 사고원인 요소는 PRS였 다. 이를 전문가들의 브레인스토밍을 통해 작성된 flowchart를 바탕으로 베이지안 네트워크 분석을 시행한 결과 PRS 각 요소별 조건부 확률 을 확인할 수 있었다. DP 선박의 drive off를 발생시키는데 주요한 영향을 미치는 것은 DGPS, microwave radar 및 HPR 이었고 DGPS에 주 요한 영향을 미치는 에러 요인은 signal blocked, electric components failure, relative mode error 및 signal weak or fail이라는 것도 확인할 수 있었다.
Trans Abstract
The Dynamic Positioning System consists of 7 elements which are namely Power system, Human machine interface, DP Computer, Position Reference System(PRS), Sensors, Thruster system and DP Operator. Incidents like loss of position(LOP) on DP vessel usually occur due to errors in these 7 elements. The purpose of this study is to find out safety operation method of DP vessel through qualitative and quantitative analyze of DP LOP incidents which are submitted to IMCA every year. The 612 DP LOP incidents submitted from 2001 to 2010 were analyzed to find out the main cause of the incidents and its rate among other causes. Consequently, the highest rate of incidents involving DP elements are PRS errors. DP computer, Power system, Human error and thruster system came next. The PRS has been analyzed and a flowchart was drawn through expert brainstorming. Also, the conditional probability has been analyzed through Bayesian Networks based on this flowchart. Consequentially, the main causes of drive off incidents were DGPS, microwave radar and HPR. Also, this study identified the main causes of DGPS errors through Bayesian Networks. These causes are signal blocked, electric components failure, relative mode error, signal weak or fail.
1. 서 론
Dynamic Positioning System(이하 DPS라 함)은 IMO MSC/Circ 645에 의하면 thruster 힘을 이용하여 unit 또는 선 박의 위치를 자동으로 유지시키는 시스템을 말한다(IMO, 1994). 이러한 DPS를 설치한 선박을 활용해서 해저 케이블 설 치 작업, 해저 다이버 지원 작업, Remote Operated Vehicle 지 원, 해저 Drilling, 준설, 해상의 고정식 플랫폼 물자 수송, 대 형 여객선, 셔틀 탱커 등 다양한 특수 작업을 수행하고 있다. 이러한 특수 작업들은 일반적인 선박의 항해보다 많은 위험성 을 내포하고 있기 때문에 DP 선박을 활용한 작업도중 사고가 발생 하면 인명피해 뿐만 아니라 해양오염, 관련 처리 비용 등 에서 그 피해도 크게 나타난다. 이에 IMCA에서는 DP 선박의 운용 중에 발생하는 위치손실(Loss of Position, 이하 LOP이 라 함) 관련 사고에 대한 자발적인 보고를 요구하고 있으며 이렇게 수집된 자료를 산업계에서는 DP 선박 운용 시에 참조 로 활용하고 있다. 즉, DP 선박의 LOP 사고 보고서 사례 분 석을 통해 동일 사고의 재발을 방지하고 DP 시스템 자체의 취약점을 보강하며 사고와 관련된 인적과실 부분에 대한 분석 을 통하여 DP 선박의 안전운항에 활용하고 있다.
국내에는 아직 DPS를 설치하여 운용되고 있는 선박이 많 지 않지만 국내 조선소에서는 DPS를 설치한 offshore 분야 선박을 많이 건조하고 있고, 앞으로 쇄빙선, 해저 탐사선, 다 이버 지원선 등 다양한 목적으로 DP 선박의 국내 도입이 예 상되고 있다. 이에 본 연구에서는 IMCA에 보고된 DP 선박의 사고사례 분석을 통하여 동 선박의 안전한 운항을 위해 고려 해야 하는 사항들을 알아보고자 한다.
이를 위해 본 연구에서는 2001년부터 2010년까지 10년 동 안 IMCA1)에 보고된 DP 선박 LOP 사고 사례를 분석하여 가 장 많은 비중을 차지하고 있는 DP 선박의 사고원인을 알아보 았고 이를 정성적, 정량적으로 분석하였다. 정성적 분석으로는 전문가들의 브레인스토밍 기법으로 특정 사고를 분석하였고, 정량적 분석으로는 베이지안 네트워크를 사용하였다. 단, 분석 해야할 자료의 방대함으로 본 연구에서는 가장 많은 사고 원 인으로 작용하였던 요소를 우선적으로 분석하였고 나머지 요 소들은 추후 체계적으로 분석하고자 한다.
2. DP 시스템의 개요
Fig. 1에서 보는 바와 같이 DPS를 구성하는 요소는 동력장 치, DP control 장치(Human Machine Interface, 이하 HMI라 함), DP 컴퓨터, 위치참조시스템(Position Reference System, 이하 PRS라 함), 센서(gyro, MRU2), wind), thruster 시스템 및 DP 운용자(Dynamic Positioning Operator, 이하 DPO라 함) 7가지로 구성되어 있다(Chae, 2014).
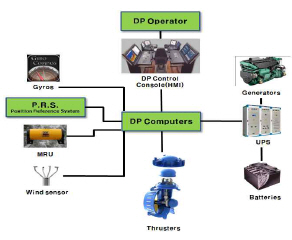
7 elements of DPS
이들 7가지 구성요소를 간단히 설명하면 다음과 같다.
동력장치 : Thruster가 적절한 추진력을 만들어낼 수 있 도록 동력을 공급하는 장치를 말한다.
HMI : DPO와 DPS사이를 연결하는 장치로 Human Machine Interface라고 한다.
DP 컴퓨터 : DPS의 기능을 수행하기 위한 수학적 알고 리즘을 바탕으로 센서와 PRS부터 수신한 정보를 사용하 여 thruster force에 필요한 힘을 계산하고 필요한 신호 를 만들어내는 장치이다.
PRS : DP 선박의 절대위치 또는 상대위치를 지속적으로 확인할 수 있도록 하는 시스템으로 대표적으로 GPS가 있다.
센서(gyro, MRU, wind 센서) : Gyro는 DP 선박의 방위, wind 센서는 풍향․풍속, MRU는 본선의 동요(rolling, pitching 및 heaving)등을 측정하기 위한 장치이다.
Thrusters : DPS 컴퓨터가 계산한 결과를 thruster에 보 내면 이를 바탕으로 선박이동에 필요한 물리적인 추진력 을 만들어내는 장치이다.
DPO : 앞의 모든 정보의 확인을 바탕으로 직접 DP 시 스템을 운용하는 사람을 말하며 그 능력에 따라 가장 변 수가 많은 부분이기도 하다.
DPS는 이러한 7가지 시스템을 본선에 적절히 설치 및 배 치하여 운용된다. DP 선박의 LOP 사고는 위에 언급된 7가지 구성요소의 문제에 의해서 주로 발생된다. 다음 장에서는 2001∼2010년 까지 IMCA에 보고된 DP 선박 LOP 사고 자료 를 분석을 통해 DP 선박의 LOP 사고에 가장 큰 영향을 미치 는 원인이 무엇인지 확인해 보고자 한다.
3. DP 선박 사고분석
3.1. 일반
2001∼2010년까지 10년 동안 IMCA에 보고된 DP 선박 LOP 사고는 중대사고, 경미한 사고, 준사고 등을 포함해서 총 612건의 사고가 보고되었으며 IMCA에서는 이를 사고 원인에 따라 DP 컴퓨터, 동력장치, PRS, thrusters, 인적 과실, 환경 영향, 전기장치 결함, 외부 영향, 기계적 결함, 운용절차, 추진 장치 문제, 센서로 총 12가지 원인으로 나누어 사고를 분류하 였다. 이들 사고 원인들 중 기계적 결함, 운용절차, 추진 장치 및 센서 4가지 원인을 나머지 8가지 다른 요소에 포함하여 분 류하였기 때문에 2007년 이전에는 동 원인에 의한 사고가 별 도로 분류되어 표시되지 않았고, 2008년 이후부터 IMCA에서 DP 사고의 원인을 좀 더 상세하게 분류하기 위해 12가지로 나누었다. Table 1은 612건의 LOP 사고에 대한 원인별 분류 와 그 횟수를 보여주고 있다. 이를 보면 10년 동안 가장 많은 LOP 사고 요인으로 작용했던 장치는 PRS라는 것을 알 수 있 다.

Causes and numbers of DP LOP incidents
IMCA에 보고된 모든 DP LOP 사고는 선주들이 자발적으 로 하는 것이기 때문에 해마다 보고된 사고가 전 세계에서 발 생한 모든 DP LOP 사고라고는 할 수 없다. 즉, 특정 연도에 보고된 횟수가 많은 것이 그 해에 절대적으로 DP 사고가 많 았기 때문이라고 보기는 힘들다. 예를 들어 2001년의 경우에 는 IMCA에서 DP LOP 사고보고를 관련 회원사에 적극적으 로 권장하였기 때문에 다른 연도에 비해 비교적 많이 접수가 된 경우이다. 따라서 본 연구의 결과가 실제로 발생하는 전체 DP LOP 사고를 대변한다고는 할 수 없고, 보고된 DP LOP 사고 안에서의 비율 및 패턴에 한정된다는 것을 미리 밝혀 둔 다. Table 2 및 Fig. 2는 해마다 발생한 DP LOP 사고의 원인 별 비율을 백분율(%)로 표시한 것이다.

Rate of DP LOP incidents and 10 years average(%)

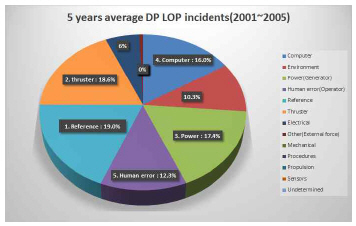
10 years average of DP LOP incidents causes
연도별 사고 원인 비율 및 10년 평균치에서 가장 큰 비율을 차지한 것은 PRS(22.0%)이었고, 다음으로 DP 컴퓨터(16.2%), 동력장치(15.9%), 인적과실(11.8%), thruster(11.2%)순으로 나 타났다. 이들 5가지 사고 원인 비율을 모두 합치면 77.1%를 차지한다.
이들 5가지 원인은 앞서 설명한 DPS의 7가지 구성요소들 중 HMI와 센서를 제외하고 모두 DPS의 구성 요소에 포함되 어 있다. 따라서 DPS 구성요소들에 의한 DP LOP 사고의 원 인을 분석하면 DP 선박의 안전운용에 참조할 수 있는 사항을 확인할 수 있을 것이다. 이를 위해 본 연구에서는 비교적 발생 빈도가 높은 5가지 주요한 DP선박 LOP 사고 원인을 분석해 보고자 한다.
Fig. 3는 10년 동안 5가지 주요한 DP LOP 사고 원인의 추 이 변화를 보여주고 있다. 전체적으로 각 요인의 비율은 일정 한 패턴을 그리고 있다고 볼 수는 없다고 하겠다. 단, PRS는 2003년을 제외하고 보고된 DP선박 LOP 사고에서는 전체적으 로 매년 상위권을 차지하고 있다는 것을 알 수 있으며 특히 2008∼2010년 3년 동안에는 지속적으로 PRS가 DP선박 LOP 사고 원인 1위를 차지하고 있다.
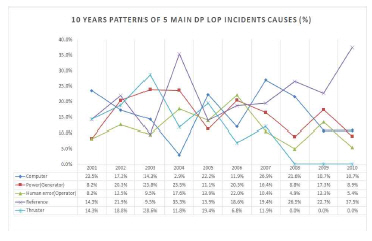
10 years patterns of 5 main DP LOP incidents causes
3.2. DP선박 LOP 사고 원인별 순위 상세 분석
전체적인 사고원인의 패턴을 좀 더 살펴보기 위해서 앞서 Fig. 3과 관련하여 5년 단위 사고 원인 평균 비율을 Fig. 4(2001∼2005년)와 Fig. 5(2006∼2010년)와 같이 표시해 보았 다.
5 years average on DP LOP incidents causes

5 years average on DP LOP incidents causes
2001∼2005년 평균에서는 PRS(19.0%), thruster(18.6%), power(17.4%), computer(16.0%), human error(11.2%) 순으로 나타났으며, 이들 5가지 원인을 모두 합치면 83.3%를 차지하 고 있었다. 10년 평균과 비교하면 5가지 주요한 원인에 대한 항목은 변화가 없었지만 그 순위 변화는 아래 Table 3과 같이 변동이 있었다. 그럼에도 PRS는 여전히 DP선박 LOP 사고 원 인으로 1위를 차지하고 있었다.

5 categorizations of average DP LOP incidents
2006∼2010년 평균에서는 PRS(24.9%), computer(16.3%), power(14.4%), electrical(11.4%), human error(11.2%) 순으로 나타났으며 이들 5가지 원인을 모두 합치면 78.2%로 주요한 LOP 사고의 원인으로 작용하고 있었다. 특이점은 propulsion 과 thruster가 6위 및 7위를 차지하게 되었고 electrical이 4위 를 기록하고 있었다.
동 분석에 추가하여 최근 3년 평균 및 2010년 한 해 동안의 주요한 DP선박 LOP 사고의 원인을 분석하여 Table 3과 같이 정리해 보았다.
2008∼2010년까지 3년 DP선박 LOP 사고 평균에서는 electrical에 의한 사고가 2위로 비교적 높게 나타났고 2010년 의 원인별 순위에서도 비슷하게 나왔으나 특이점은 조류나 바 람과 같은 외부 환경 요인이 5위를 차지하였다. 주목할 점은 5 가지 모든 분류에서 PRS는 항상 1위를 차지하고 있다는 것이 다. 즉, DP 선박 운용에 있어서 가장 큰 사고 원인으로 작용 하는 것은 PRS라고 할 수 있다. 10년간 보고된 612건의 사고 보고서를 전문가들이 모두 상세하게 분석하는 것은 상당한 시 간이 필요한 사항이기 때문에 본 연구에서는 우선 가장 높은 비율을 차지하고 있는 PRS에 대한 분석을 전문가 의견, 사고 연관성 flowchart 및 베이지안 네트워크를 사용하여 분석해 보았다.
4. DP 선박 사고 PRS 상세 분석
4.1. 일반
IMCA에 보고된 DP LOP 사고 612건 중 PRS 관련 사고는 136건 이었다. 이들 중 tensioner3)에 의한 사고 1건, riser angle sensor에 의한 사고 2건은 DP 시스템에서 일반적으로 PRS나 sensors에 포함시키지 않기 때문에 제외하고 133건의 PRS 관련 사고를 전문가들의 브레인스토밍 및 베이지안 네트 워크를 사용하여 분석하였다.
브레인스토밍 기법은 정성적 분석으로 각 사고들 사이의 관계도를 그려내기에 용이하다는 장점이 있고, 베이지안 네트 워크는 정량적 분석으로 각 사고들 사이의 조건부 확률을 분 석하고 표현하는 데 유용한 방법이다. 이 두 가지 방법을 사용 하면 사고와 관련된 관계도를 조건부 확률로 이해하기 쉽게 표현할 수 있기 때문에 사고 사례 분석을 위해 상당히 많은 시간이 소요된다는 단점을 제외하면 정성적 분석과 정량적 분 석을 동시에 적절히 활용하여 신뢰할 수 있는 결과를 얻을 수 있을 것으로 판단된다.
4.2. 위치참조시스템(PRS)
DP 선박에서 사용되는 PRS에는 가장 많이 사용되는 DGPS를 포함하여 microwave systems4), Laser reference5), Taut wire6), HPR7) 및 DARPS8)등 다양한 장비가 사용된다. 이러한 PRS들은 그 원리에 따라 전파, 레이저, 와이어, 음파 등을 사용하여 본선의 절대 또는 상대 위치를 확인할 수 있다. PRS들은 DP 선박 운용 중에 발생할 수 있는 다양한 환경적 변화 및 상황에 영향을 받기 때문에 오작동의 우려가 항상 존 재한다. 예를 들어 DGPS는 태양풍의 활동이 활발해지면 전파 교란으로 영향을 받을 수 있고, 레이저는 비나 눈에 영향을 받 으며, 음파는 잡음 및 수온과 염도 등에 영향을 받아 에러가 발생 할 수 있다. 이러한 PRS들이 가지고 있는 한계 때문에 선급에 DP Class 29)이상의 선박으로 등록되기 위해서는 PRS를 최소 3종류 이상 설치하도록 요구하고 있다(ABS, 2013).
PRS 관련 LOP 사고 133건을 좀 더 상세히 분석해 보면 Fig. 6와 같다. 10년간 DP 선박 LOP 사고에서 가장 큰 사고 원인으로 작용하였던 PRS는 DGPS(57.4%)이고, 다음으로 Artemis, Sensors(gyro, MRU, wind sensor), HPR 순으로 이 어진다.

DP LOP incidents ratio depend on PRS types
DGPS가 가장 높은 비율을 차지하고 있는 이유는 거의 모 든 DP 선박이 DGPS를 가장 기본적인 PRS로 사용하고 있기 때문에 이에 따른 사고 비율도 높게 나타났다고 할 수 있다. 또 다른 이유로 DGPS는 태양의 활동, 주변의 장애물, 전리층, 위성 궤도 에러, 위도에 따른 에러, GPS 위성 및 수신 장치가 가지고 있는 시계 오차 등 다양한 에러 발생요인을 가지고 있 기 때문에 이와 관련된 에러들이 DP선박의 LOP 사고들과 큰 관련성을 가지고 있다. 다음으로 RADius, Sensors(gyro, MRU, wind sensor), HPR 순으로 이어지는 것도 대부분의 DP 선박이 동일한 시스템들을 많이 설치하여 사용하기 때문 이라고 할 수 있다.
이러한 PRS들이 DP 선박 운용에 어떠한 영향을 미치는지 에 대한 관계를 과거사고 사례를 바탕으로 확인하면 DP선박 의 안전한 운용에 도움이 될 것으로 판단된다. 즉, DPO가 어 떠한 PRS가 어떠한 영향을 받아 에러가 발생하는지를 미리 확인하고, 이를 바탕으로 사전에 대응 전략을 세운다면 DP선 박의 안전운용에 도움이 될 것으로 판단된다.
4.3. DP 선박 PRS사고 관련 관계 flowchart
DP 선박의 LOP사고는 크게 drift off와 drive off 두 가지로 분류된다. Drift off는 본선의 동력이 상실되어 DP 선박이 외 력에 의해 밀려서 원래의 위치에서 벗어나는 것을 말하며 보 통 전체 blackout, 부분 blackout에 의한 thruster 용량 부족에 의해서 발생할 수 있다. Drive off는 본선이 가지고 있는 동력 이 잘못된 위치 정보나 DPO의 잘못된 위치 입력에 의해서 원 하던 위치에서 벗어나게 되는 사례를 말한다(Shi, Phillips, & Martinez, 2005). 이에 추가하여 DP 시스템에 문제가 발생 했 으나 이로 인한 위치 변동은 없었고 DP 작업이 중단되는 경 우를 operation abort라고 하며, 위치 변화도 없고 작업이 중 단 되지도 않았으나 작업 중 발생한 장비 문제로 DP class(등 급)가 감소하여(degraded) 시간 손실이 발생한 경우를 Time loss라고 한다(Hauff, 2014).
앞서 4가지 분류 중 drift off는 DP 선박의 동력부분 문제에 의하여 발생하는 사고이기 때문에 PRS에 문제가 발생해서는 drift off가 발생하지 않는다. 따라서 PRS 관련 flowchart를 그 리는데 있어서 drift off항목은 제외하고, Fig. 7와 같이 전문가 들의 브레인스토밍을 통하여 관련 사고의 연관성에 대한 flowchart를 작성하였다. 즉, PRS관련사고 133건을 분석하여 6종류의 PRS, 10종류의 에러 요인, 4종류의 sensors로 분류하 였고, 이들이 drive off, operation abort 및 time loss 사건과 어떻게 관련이 있는지 표현하였다.
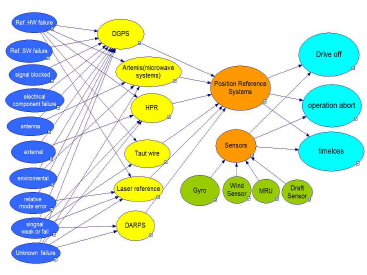
Interrelation flowchart of PRS and Sensors
4.4. 베이지안 네트워크(Bayesian Networks)
베이지안 네트워크를 설명하기에 앞서 베이즈 이론을 먼저 설명할 필요가 있다. 선박운항 중 발생하는 사고는 원인과 결 과 사이에 복잡한 인가관계를 형성한다. 이와 같이 실세계에 서 발생하는 다양한 사건 사이의 확률적인 인과관계를 모델로 표현하는 것은 불가능한데, 1763년 베이즈(Bayes)가 고안한 베이지안 기법을 적용하면, 직접적인 인과관계의 조건부 확률 (conditional probability)을 정의한 후, 확률분포로서 효과적으 로 표현할 수 있다(Yim, 2009).
DP 선박에서 drive off, operation abort 또는 time loss가 발생하는 것은 이것에 영향을 미치는 DP 선박의 여러 구성 요소의 인과 관계에 의해서 발생하는 것이라고 할 수 있다. 예 를 들면 drive off가 발생하는 조건으로 PRS 또는 sensors가 영향을 주게 되고 이러한 2가지 조건들은 또 다른 조건들에 의해서 영향을 받게 된다. 이것을 수식으로 모델화 한 것이 베 이즈 이론(Bayes theorem)이며 식은 다음과 같다.
베이지안 네크워크는 베이즈 이론을 바탕으로 어떤 사건의 상태나 결과를 나타내는 노드(node)와, 노드(node) 사이의 인 과 관계를 나타내는 아크(arc)를 이용하여 그래픽적인 요소로 표현하는 기법을 말한다(Yim, 2009).
베이지안 네트워크는 시스템적인 요인과 인적요인을 적용 하여 위험성에 영향을 미치는 상호간의 관계를 정확하게 정량 적으로 표현할 수 있기 때문에 위험성 분석에서 많이 사용되 고 있다. 이러한 베이지안 네크워크 기법의 가장 큰 장점은 조 건부 확률과 그것들의 상호 관계를 쉽게 표현할 수 있다는 것 이다(Hauff, 2014).
앞서 전문가의 브레인스토밍을 바탕으로 PRS 관련사고 133건에 대한 상호 연관성을 4.3에서 flowchart로 표현하였다. 동 flowchart는 사건 데이터를 바탕으로 한 정성적 분석이라 고 할 수 있는데 이러한 분석을 통해서 상호 관계는 확인할 수 있겠지만 어떠한 항목이 어느 정도로 영향을 미치는지에 대해서는 알아내기 어렵다. 이에 정성적 분석을 통해 만들어 진 flowchart에 추가하여 PRS 관련사고 133건의 정량적 분석 을 위해 베이지안 네트워크를 통해 사고의 상호 연관성을 분 석하였다. 이 연구에서 베이지안 네트워크를 만들기 위해 사 용된 프로그램은 미국 피츠버그 대학에서 개발한 GeNIe 프로 그램으로 베이지안 네트워크를 기반으로 정성적 분석을 통해 만들어진 flowchart에 사고 관련 데이터를 접목하여 상호 조 건부 가능성에 대한 사항을 그래픽으로 보여주는 프로그램이 다.
4.5. PRS관련 베이지안 네트워크 분석
GeNIe 프로그램은 마이크로소프트 엑셀파일에서 작성된 내용을 데이터로 활용할 수 있는 기능을 가지고 있다. 이 기능 을 활용하기 위해 133건의 PRS 관련 사고를 분석하여 119건 의 PRS 및 14건의 sensors와 관련된 사항으로 분류하였다. 앞 서 Fig. 7의 flowchart에 표시된 노드 제목과 PRS에 발생한 에러와 관련이 있으면 엑셀시트에 “0”으로 표시하고, 관련되 어 있지 않으면 “1”로 표시하여 133건의 DP선박 LOP 사고를 엑셀파일로 작성하였다. 이렇게 작성된 파일을 GeNIe 프로그 램에서 불러오면 Fig. 9와 같은 분석 결과를 보여준다.

Result of PRS bayesian networks through GeNIe
특정 노드는 그것의 모(parents) 조건에 따라 분석되는데 이를 Node Probability Table(NPT)라고 한다. Fig. 8은 PRS 및 Sensor와 관련한 분석 결과를 NPT table로 보여주고 있다. NPT table의 의미는 다음과 같다. 예를 들어 “0.544194997”로 표현된 부분은 PRS 및 sensors가 동시에 에러와 관련이 있는 경우 제로(State 0)로 표현되고 이것이 함께 작용하여 에러 조 건(State 0)을 만들어내는 경우를 의미한다.

NPT table and explanation
Fig. 9 flowchart를 보면 drive off, operation abort, time loss의 조건부 가능성을 보여주고 있다. 가장 많은 사고는 time loss이며 59%를 보여주고 있다. 주의 할 것은 동 분석 결과는 과거 사고에 대한 발생 비율이 아니고 PRS 및 sensors에 의한 조건부 확률을 의미한다는 것이다. 앞서 설명 한 바와 같이 state 0은 에러 요인과 연관이 있음을 나타내고, state 1은 연관이 없음을 의미하는 것이다. Drive off(27%) 및 operation abort(23%), time loss(59%)모두의 합이 100%를 넘 는 이유는 특정 에러가 drive off, operation abort 및 time loss중 두 가지 이상에 영향을 미치는 경우가 포함되었기 때 문이다.
추가하여 GeNIe 프로그램을 이용하여 베이지안 네트워크 를 분석하면 각 노드의 상호 영향의 정도를 색의 농도로 표현 할 수도 있다. 여기에서는 PRS의 영향만을 분석하기 위해서 sensor항목은 제거하여 Fig. 10과 같이 분석해 보았다. GeNIe 프로그램의 기능중 하나인 drive off를 타깃(target)으로 설정 하여 분석하면 PRS중에서 DGPS와 HPR이 drive off에 가장 많은 영향을 미치고 있다는 것을 쉽게 표현할 수 있다.
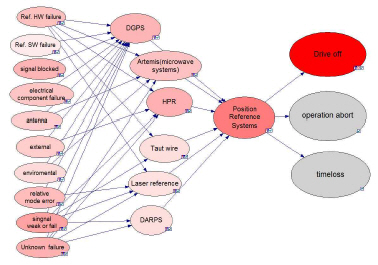
Influence factors of drive off event
Fig. 11과 같이 DGPS를 타깃으로 설정하여 분석하면 DGPS는 signal blocked, electric components failure, relative mode error 및 signal weak or fail이 가장 많은 영향을 미치 고 있다는 것을 확인할 수 있다.

Influence factors of DGPS
지금까지 전문가들의 DP LOP 사고 관련 정성적 분석과 베 이지안 네트워크를 통한 정량적 분석을 통해 DP 사고 관련 가장 큰 원인으로 작용하는 PRS의 DP선박 LOP사고 연관성 및 주요작용 요인의 조건부 확률을 확인해 보았다.
5. 결론
DPS는 HMI, PRS, 센서, DP 컴퓨터, 동력 시스템, thruster 시스템 및 DPO 7가지 요소로 구성되어 있다. 이들 구성요소 들이 2001∼2010년까지 10년간 IMCA에 보고된 DP LOP 사 고에 어느 정도로 영향을 미쳤는지 원인별로 분류하여 10년간 의 평균을 내어 본 결과 가장 많이 원인으로 작용했던 요소는 PRS이었다. 다음으로 DP 컴퓨터, DP 동력 시스템, 인적 과실 및 thruster가 2위부터 5위까지를 차지하고 있었다. 이러한 원 인들을 5년 단위, 최근 3년 단위 및 2010년 등으로 분류하여 원인별로 평균을 내어 본 결과에서도 PRS는 DP LOP 사고원 인에서 가장 높은 요인으로 작용하고 있었다.
이를 좀 더 상세하게 분석하기 위해 10년 동안 발생한 DP 사고의 PRS와 관련된 사고 133건을 전문가들의 브레인스토밍 을 통해 정성적으로 분석하여 PRS와 DP선박 LOP사고에 대 한 상호 관계를 flowchart로 작성하였고 이것을 베이지안 네 트워크 방법으로 분석한 결과 drive off, operation abort 및 time loss 사건에 대한 조건부 가능성을 확인할 수 있었고, 각 노드에 가장 많은 영향을 미치는 원인들을 그래픽으로 이 해하기 쉽게 표현할 수 있었다.
이러한 분석을 활용하면 DPO들은 DP선박 운용 전에 LOP 사고에 많은 영향을 미치는 원인들을 사전에 파악하여 그에 따른 대응책을 미리 수립할 수 있을 것이고 이를 통해 좀 더 안전하게 DP 선박을 운용 할 수 있을 것이다.
본 연구를 통해 알게 된 DP선박 LOP사고관련 PRS의 정성 적▪정량적 분석을 바탕으로 DP선박 LOP 사고의 주된 원인 5가지 중 나머지 4가지를 hardware (PRS, 컴퓨터, 동력 시스 템, thruster) 부분과 인적요소로 나누어 추가적인 분석이 이 루어져야 할 필요가 있다. 더 나아가 이렇게 수행된 결과를 바 탕으로 DP Class 2이상의 선박은 반드시 보유하고 있어야하 는 FMEA의 확인을 통해 문제발생시의 대응능력을 키우고, 이러한 것이 DP 선박의 안전 운용에 미치는 영향을 실제 DP 선박 또는 DP 시뮬레이터를 통해 확인하는 연구가 필요할 것 이다.
Notes
International Maritime Contractor’s Association
Motion Reference Unit : 선박의 6자유도 운동중에서 선박의 Rolling, Pitching 및 Heaving을 측정하는 센서를 말함. DP 선박에서 이 3가지 운동은 선박의 위치 변화가 발생한 것은 아니기 때문에 이를 보정해주기 위해서 측정하여 DPS로 보냄(Chae, 2014).
Cable laying 선박이나 Pipe laying 선박에서 cable 또는 pipe를 hold하여 선미로 서서히 내려주는 장치를 말함.
선박에 설치된 interrogator와 물표에 설치된 transponder 사이에 전파를 주고받으며 방위와 거리를 측정할 수 있는 위치참조시스템
레이저를 이용하여 상대 거리와 방위를 측정할 수 있는 위치참조시스템
해저에 내려진 wire의 각도와 길이 변화를 측정하여 위치를 확인할 수 있는 위치참조시스템
Hydro-acoustic Position Reference, 음파를 이용하여 본선의 transducer와 해저에 설치된 transponder 사이의 거리와 방위를 측정하 는 위치참조시스템
DARPS(Differential Absolute and Relative Positioning Sensor) : GPS에 의한 두 선박의 위치를 UHF link로 상호 주고 받아 두 선 박 사이의 거리를 확인하고 일정 간격을 유지하도록 지원하는 시스템을 말함.
DPS의 구성요소나 시스템의 단일 고장사고에 의해서는 위치유지 기능을 상실하지 않는 등급을 말한다. 미국선급(ABS), DNV(노르 웨이 선급), IMO 및 영국선급(LR) 요건에서는 DP Class 2 이상의 선박은 위치참조시스템을 3개 이상 설치하도록 요구하고 있음.