최근접점 상대방위에 따른 선박충돌위험알고리즘 개발에 관한 연구
A Study on the Degree of Collision Risk with Relative Bearing at CPA
Article information
Abstract
일반적으로 VTSO(Vessel Traffic Service Operator)는 양 선박의 충돌위험 정도를 판단할 때, 선박들의 침로와 속력, DCPA(Distance to CPA)와 TCPA(Time to CPA) 그리고 양 선박의 조우상황 등을 종합적으로 고려한다. 이에 본 연구에서는 CPA에서 의 양 선박 상대방위에 따른 충돌위험도 계산 알고리즘을 제안하고, 알고리즘의 타당성을 검증하기 위하여 다양한 조우상황별 충돌위험 도 측정에 대한 VTSO의 설문조사를 실시하였다. 그 결과, 제안한 알고리즘에 의한 위험도 평가 결과와 VTSO의 설문결과 사이에 높은 상관관계가 있음이 확인되어 제안한 알고리즘의 유효성을 검증하였다.
Trans Abstract
When VTSOs(Vessel Traffic Service Operators) determine the degree of collision risk of two vessels, they consider comprehensively information about each vessel’s course, speed, DCPA, TCPA and encountering situation. In this study, we proposed an algorithm in which two relative bearings as information about two vessel’s encountering situation are used to evaluate the degree of collision risk. In order to verify whether the proposed algorithm is reasonable, we set twenty encountering situations and conducted a survey of collision risk on fifty three VTSOs about those situations. By comparing the degrees of collision risk with the proposed algorithm to the results of the survey, we found that relative bearing at CPA is very important factor for VTSO to recognize the level of collision risk when two vessels are in encountering situation.
1. 서 론
해양안전심판원 해양사고통계발표문에 따르면 최근 5년 (2010-2014)간 전체 426건의 충돌사고 중 84.2%가 경계·선 위확인·침로선정 유지 등 항해 일반 원칙의 미준수로 나타났 고, 충돌 사고 직전 상대선의 초인거리가 1마일 미만이거나 미발견한 사고가 전체 충돌사고의 68.7% 이상을 차지하고 있 다(KMST, 2015).
국내에서 발생하는 충돌사고 대부분이 경계 소홀 등 상대 선박을 조기에 인지하지 못하여 발생하고 있어 이러한 사고원 인을 줄이기 위한 VTS의 역할이 무엇보다 중요시 되고 있다. 해상교통관제사는 선박의 충돌사고를 방지하기 위하여 해상 교통관제(Vessel Traffic Service)시스템을 통하여 선박의 움 직임을 실시간으로 모니터링하며 충돌위험상황을 인지하는 과업을 수행하고, 해당 선박에게 적절한 조치를 취하도록 정 보제공·조언·권고·지시를 함으로써 사고를 예방하고 있다.
그러나 일부 선박에서는 근접상황이 되어도 변침·감속 등 적절한 조치를 취하지 않거나, 유지선이 상대선박의 의도를 파악하지 않은 채 근접 위험상황에서 피항선 방향으로 좌변침 하여 충돌위험을 초래하거나 충돌사고로 이어지는 사례 (BMST, 2015)가 발생하고 있다.
관제사는 선박간의 벡터를 모니터링하며 인지과업을 수행 할 때, DCPA(Distance to the Closest Point of Approach)와 TCPA(Time to the Closest Point of Approach)뿐 아니라 선 박 간의 조우상황을 고려하게 되며, 이때 국제해상충돌예방규 칙에 따라 피항선을 호출하여 피항 동작을 취하도록 하고, 유 지선에게 정보를 제공하여 안전한 통항을 유도한다.
해상 교통 평가 방법과 관련하여 IALA(International Association of Lighthouse Authorities)에서는 PAWSA(Port and Waterways Safety Assessment)와 IWRAP(IALA Waterway Risk Assessment Program)을 제안하고 있으며, PAWSA는 해당 수역 전문가 의견을 델파이 기법(Delphi method)에 따라 변환하여 정성적인 결과를 얻는 위험평가모 델로써, 항로상의 24가지 위험요소에 대해서 위험 상황을 기 술하고 각 분야 전문가와 해당 항만 이해당사자들이 위험수준 을 수치적으로 평가하여 잠재적인 완화 방안 및 새로운 대안 을 제안·평가한다(USCG, 2005).
IWRAP은 정량적인 평가모델로써, 위험요소를 수치화하여 해당 수역 및 항만의 해도 또는 기타 수집된 정보와 그 곳을 통항하는 선박의 AIS정보를 입력하며, 선박이 피항 동작을 실패할 경우 연 간 충돌 및 좌초 확률을 선박 조우 관계에 따라 마주침(Head-on), 추월(Overtaking) 그리고 교차(Crossing) 상태에 대하여 계산한다.
선박충돌 위험도와 관련한 기존 연구 중 환경스트레스 모델은 원 침로 기준 1도 단위로 세분화된 데이터에 따른 주관적 충돌위험도, 즉 타선박과의 조선부담 정도를 정량화한 교통환경스트레스값 (ESS)과 지형장애물과의 조선부담 정도를 정량화한 조선환경스트 레스값(ESL ) 중 상대적으로 큰 충돌위험값(ESA )을 미리 설정한 문턱값과 비교하여 기준선박이 위치한 환경에서 충돌위험도를 판 단한다(Park, 2012).
Sech(Hyperbolic secant, 쌍곡선)함수를 이용한 충돌위험도 평가 법은 최근접거리(dcpa)와 목표의 접근시간(ta), 그리고 본선이 유 지선 또는 피항선인지를 판단하는 상태결정함수(Φ(θ, a))를 변수 로 위험도를 구한다(Jeong, 2003).
이외에도 DCPA, TCPA, 그리고 VCD(Variation of Compass degree)를 퍼지추론으로 산출하여 자선과 타선 사이의 방위 변화 각을 반영하여 충돌위험도를 세분화한 연구(Kim, 2001)와 DCPA. TCPA 값을 확률 변수로 하여 현재위치에서 속도, 방위각을 유지 한다는 가장 하에 베이지안 추정으로 충돌위험도를 추정한 연구 (Song, el al. 2011)가 있다.
이에 본 연구에서 선박충돌위험과 관련된 여러 요인 중 VTS 관 점에서 선박조우상황을 판단하기 위해 최근접점에서 선박조우관계 를 분석하고, 최근접점에서의 상대방위에 따른 위험값과 이를 이용 한 선박조우상황에 따른 위험도를 산출하고자 한다.
본 논문은 2장에서 최근접점에서의 선박조우상황을 분석하고, 3 장에서 최근접점에서의 상대방위에 따른 위험값과 선박조우상황에 따른 위험도를 구하고, 4장에서 해상교통관제사 설문조사 결과와 산출된 위험도를 비교하고, 5장 결론 순으로 구성된다.
2. 최근접점에서의 선박조우상황 분석
본 연구에서는 선박조우상황을 판단하기 위한 방법으로 TCPA가 0인 지점 즉, 두 선박이 최근접점에 위치할 때, A선 박에서의 B선박 상대방위를 θa, B선박에서의 A선박 상대방위 를 θb라 하고 θa와 θb의 변화에 따른 양 선박 간의 교행관계를 비교하면 Fig. 1과 같다.
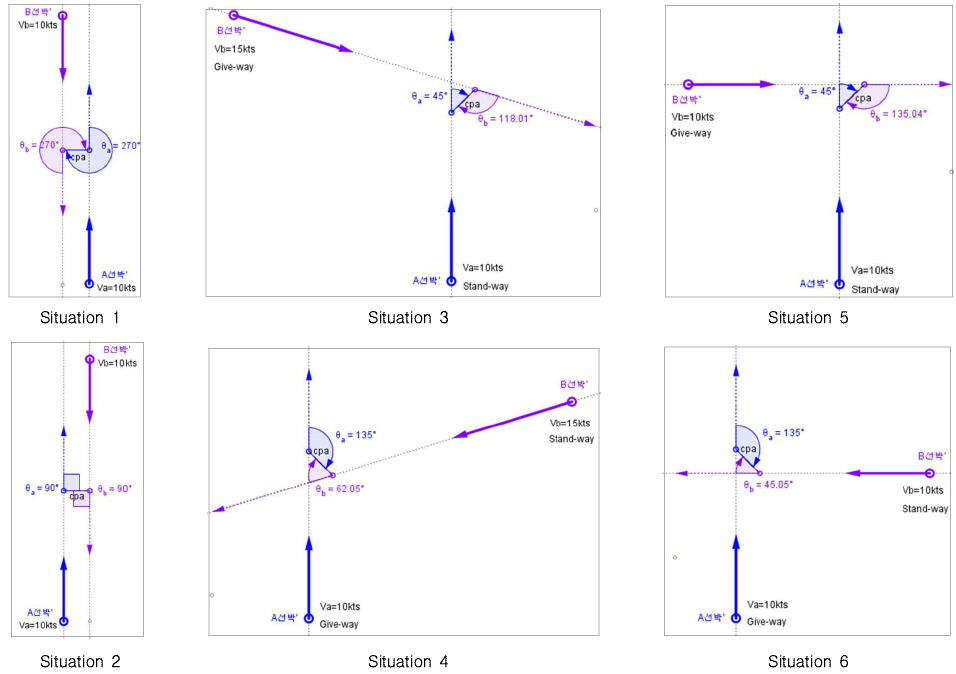
Comparative of θa and θb (DCPA=0.2 miles, TCPA=6 min)
이때 A선박의 침로는 0도(또는 360도), 속력은 10노트이며, DCPA는 0.2마일, TCPA는 6분으로 설정하였다.
Situation 1과 같이 선박이 좌현 대 좌현으로 통과할 때 최근 접점에서의 θa와 θb는 각각 270도, Situation 2와 같이 우현 대 우현으로 통과하면 θa와 θb는 각각 90도가 된다.
Situation 3과 5는 θa가 45도로 동일하나, θb의 변화에 따라 B선박의 침로와 속력이 변화한다. θb가 90도에 가까워지면 B 선박의 속력은 크게 증가하며 유지선(A선박) 선수를 지나고, Situation 3과 같이 θb가 118도가 되면 교차각 110도로 피항선 (B선박)이 15노트로 유지선(A선박) 선수를 지난다. Situation 5와 같이 θb가 135도가 되면 피항선(B선박)이 유지선(A선박) 선수를 직각으로 교행하며 속력은 같아진다.
Situation 4와 6은 θa가 135도로 동일하나, θb의 변화에 따라 B선박의 침로와 속력이 변화한다. θb가 90도에 가까워지면 B 선박의 속력은 크게 증가하며 A선박(피항선) 선미를 지난다. Situation 4와 같이 θb가 62도가 되면 교차각 110도로 유지선 (B선박)이 15노트로 피항선(A선박) 선미를 지난다. Situation 6과 같이 θb가 45도가 되면 피항선(A선박)이 유지선(B선박) 선수를 직각으로 교행하며 속력은 같아진다.
또한 Situation 5와 6의 경우, 각 선박은 유지선에서 피항선 으로 서로 입장이 바뀌지만, VTS 관점에서는 같은 속력을 가 진 두 선박이 직각으로 교행하며 피항선이 유지선 선수를 지 나는 동일한 조우상황이 된다. 이러한 선박과 VTS의 입장 차 이를 Fig. 2에서 확인할 수 있다.

Comparison of VTS’s and vessel’s viewpoints
이처럼 최근접점에서의 θa와 θb에 따라 양 선박의 조우상황 이 추월 상태인지, 마주침 상태에서 좌현 대 좌현 또는 우현 대 우현으로 통과하는지, 횡단 상태에서 피항선이 유지선 선 수 또는 선미를 지나는지, 교차각과 속력차는 어떠한지를 알 수 있다.
3. 최근접점에서의 상대방위에 따른 알고리즘 연구
DCPA와 TPCA가 동일한 상황에서 최근접점에서의 θa와 θb 에 따라 양 선박의 조우상황과 속력비, 교차각을 비교하면 Table.1과 같이 일정한 패턴을 가진다.

Patterns of encountered situation due to θa
선박뿐 아니라 VTS에서도 선박이 항해 일반수칙을 지키고 항법에 따라 항해를 한다면 선박충돌위험은 그 만큼 낮아지 며, 근접상황에서 우현 대 우현 통과보다는 좌현 대 좌현 통과 가, 피항선이 유지선의 선수 횡단보다는 선미 통과가 더 안전 하다 할 수 있다.
이러한 일반적인 원칙을 가지고 Table 1에서 θa에 따른 선박 의 주요 조우상황 패턴을 살펴보면, θa가 0~60도일 때는 타선 박이 A선박의 선수를 횡단하는 구간으로 충돌위험이 높고, 60~120도일 때는 타선박이 추월하거나 선미를 통과하는 구간 으로 충돌위험이 낮아지며, 120~180도일 때는 타선박을 추월 하거나 타선박의 선수를 횡단하는 구간으로 충돌위험이 다소 높아진다. Table.1에는 기술하지 않았으나, θa가 180~270도일 때는 A선박이 타선박의 선수를 횡단하는 구간에서 좌현 대 좌현으로 통과하는 구간으로 충돌위험이 낮아지며, 270~360도 일 때는 타선박을 추월하거나 타선박의 선수를 횡단하는 구간 으로 충돌위험이 높아진다.
이러한 패턴을 이용하여 최근접점에서의 i선박 상대방위에 따른 위험값을 선수 방향(0도 또는 360도)은 1.0, 우현방향 (090도)은 0.7, 좌현방향(270도)은 0.3, 그리고 선미방향(180도) 은 0.7로 각각 추정하고, 이를 sech함수를 이용하여 식(1)과 같이 표현한다.
단, a, b, c, 는 선수·선미의 최대 위험값 계수 d, e, f 는 위험정도에 따른 기울기 계수
여기서, 선수 최대 위험값 계수 a와 c는 1.0, 선미 최대 위험 값 계수 b는 0.7로, 위험정도에 따른 기울기 계수 d, e, f는 0.6, 0.8, 1.1로 각각 설정하고, 이를 그래프로 나타내면 Fig. 3과 같 다.

Value of the risk by relative bearing in the point of DCPA
Table. 1에서 θa가 30°, θb가 150°인 경우와 θa가 150°, θb가 30°인 경우를 비교하면, A선박은 유지선에서 피항선으로, B선 박은 피항선에서 유지선으로 입장이 서로 바뀌지만, VTS 관 점에서 두 선박은 피항선이 유지선 선수로 교차각 60°로 횡단 하며 양 선박의 속력이 같은 조우상황이 된다.
마찬가지로 θa가 30°, θb가 120°인 경우와 θa가 120°, θb가 30°인 경우를 비교하면, VTS 관점에서 두 선박은 피항선이 유지선 좌현에서 선수로 교차각 90°로 횡단하며 피항선의 속 력이 유지선보다 약 1.7배 빠른 조우상황이 된다.
이와 같이 최근접점에서 양 선박의 상대방위가 각각 같다면 VTS 관점에서 동일한 선박조우상황이 되고, 결국 두 선박의 상대방위에 따라 조우상황을 판단할 수 있다.
두 선박의 조우상황에 따른 위험도는 식(1)와 같이 최근접점 에서 i선박의 상대방위에 따른 위험값과 최근접점에서 j선박 의 상대방위에 따른 위험값의 합으로 결정된다.
Ei j는 i선박과 j선박이 근접할 때 조우상황에 따른 위험도를 나타내며, DCPA가 0이고 두 선박이 정선수로 마주치는 상황 이 위험도가 2.0으로 최대가 된다.
식(2)를 적용하여 Fig. 4의 조우상황에 대하여 최근접점에서 의 θi와 θj의 따른 위험값과 선박조우상황에 따른 위험도( E ij) 를 각각 구하면 Table. 2와 같다.
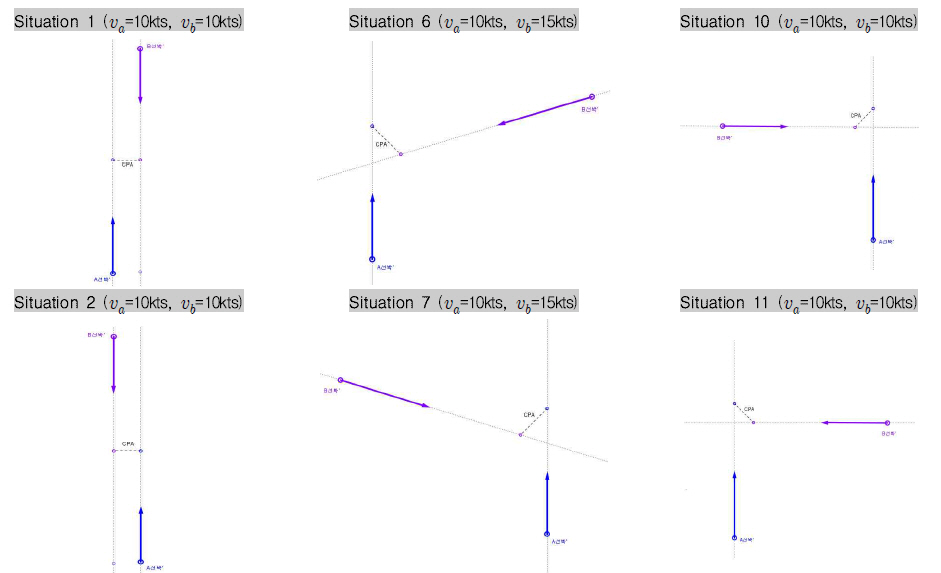
Examples of presented in the survey for each encountered situation

Computed examples of Eij
4. 설문조사를 통한 위험도 비교
본 연구에서 정의한 최근접점에서의 상대방위에 따른 선박 조우상황 위험도( E ij)가 VTS 관점에서 조우상황을 판단하기 에 타당한지 여부를 확인하기 위하여 부산항·부산신항·대 산항·목포항에 근무하는 해상교통관제사를 대상으로 설문조 사를 실시하였다.
두 선박이 다음의 조건에서 각 상황별로 조우할 때 관제사가 인지하는 충돌 위험 정도(최소 0 ~ 최대 2)를 조사하였고, 53 명의 관제사가 설문에 응하였다.
<조 건>
① 두선박의 DCPA=0.2마일, TCPA=6분
② 그림과 같은 상황까지 두 선박에선 어떠한 조치도 없었음 (변침, 감속 등)
③ 두 선박의 선종(일반화물선)과 톤수(5,000톤)는 동일하다고 가정
④ 항법에 따른 유지선, 피항선, 추월선 및 피추월선 관계 고려
Fig. 4는 설문에 제시된 20가지 선박조우상황 중 일부이며, 각 상황에 대하여 산출한 E ij값과 관제사가 느끼는 평균 위험 정도를 비교하면 그래프 Fig. 5와 같다.

Comparison of average of survey & degree of risk
설문에 제시된 선박조우상황별 충돌위험도 측정에 대한 관 제사의 설문 평균, 표준편차, 95% 신뢰구간, 그리고 조우상황 에 따라 산출된 위험도( E ij)를 각각 구하면 Table. 3과 같다.

Comparison of average of survey & Eij N=53
Ei j는 선박이 조우하는 상황을 고려한 위험 요소로써, DCPA 와 TCPA가 동일한 조건에서 관제사가 느끼는 위험정도와 비 교하면 좌현 대 좌현 통과 상황(Situation 2)에 대한 설문 평 균은 0.61, E i j 값은 0.74로 산출되었고, 우현 대 우현 통과 상 황(Situation 1)에 대한 설문 평균은 1.21, E ij 값은 1.35로 좌 현 대 좌현 보다 높게 산출되었다.
두 선박이 교차각 110도로 조우하는 Situation 6과 7에서 관 제사 설문 평균은 피항선이 유지선 선수를 횡단하는 Situation 6(1.39)이 유지선 선미를 통과하는 Situation 7(1.18)보다 높았 고, E ij 값도 마찬가지로 Situation 6(1.40)이 Situation 7(1.14) 보다 높았다.
피항선이 유지선 선수를 지나는 조우 상황에서 두 선박의 교 차각이 110도에서 90도, 45도로 바뀔 때 관제사가 느끼는 평 균 위험은 1.39, 1.56 그리고 1.58로 점점 높아졌고, 같은 조우 상황에 대한 E ij 값은 1.40, 1.48 그리고 1.58로 점점 높게 산출 되었다. 또한 교차각이 위와 같이 바뀌고 피항선이 유지선 선 미를 지나는 조우 상황에서도 관제사가 느끼는 평균 위험은 1.18, 1.39 그리고 1.54로 높아졌고, E i j 값은 1.14, 1.30 그리고 1.42로 높게 산출되었다.
이는 관제사 대부분이 좌현 대 좌현 통과보다 우현 대 우현 통과가 좀 더 위험하다 느끼고, 피항선이 유지선 선수로 지나 는 상황이 유지선 선미로 지나는 상황보다 더 위험하며, 교차 각이 작아질수록 위험을 더 느끼는 것으로 나타났다. 이와 마 찬가지로 E ij 값도 우현 대 우현 통과 상황, 피항선이 유지선 선수로 지나는 상황 그리고 교차각이 작아질수록 더 높게 산 출되어 비슷한 양상을 보였다.
결과적으로 20가지 선박 조우상황에 대한 E i j 값과 관제사가 느끼는 평균 위험정도(Mean)의 상관계수가 0.935로 강한 양 의 상관관계를 보여 제안한 알고리즘( E i j)의 유효성을 검증하 였다.
5. 결 론
본 연구에서는 선박충돌위험과 관련된 여러 요인 중 DCPA와 TCPA외에 VTS 관점에서 선박조우상황을 판단하기 위해 최근접 점에서의 선박조우관계를 분석하여 상대방위에 따른 위험값 ( R cpa)과 선박조우상황에 따른 위험도( E ij)를 구하였다. 산출한 값의 검증을 위하여 다양한 선박 조우상황에 대한 해상교통관 제사가 느끼는 위험정도와 비교하여 높은 상관관계가 있음을 확인하였다.
해상교통관제사의 인지과업을 보조하고 VTS 관점에서 선박 충돌위험을 계산·예측할 수 있는 시스템 개발을 위한 추후 연구로, 선종과 선박 크기를 고려한 DCPA 위험도와 TCPA에 따른 위험도를 구하고, 이를 실제 VTS 관제 상황과 비교·분 석하고자 한다.
Notes
(주) 이 논문은 “최근접점 상대방위에 따른 선박충돌위험알고리즘 개발에 관한 연구”이란 제목으로 “2015 추계학술대회 한국항해항만학회논문 집(한국해양대학교, 2015. 6. 12-14, pp. 249-250)”에 발표되었음