네트워크 RTK 환경에 적합한 감시 시스템 설계
Design of Monitoring System for Network RTK
Article information
Abstract
네트워크 RTK는 네트워크 내 다중 기준국의 반송파 측정치 보정정보를 활용하는 정밀 측위 기법으로 성능 개선을 목적으로 꾸준히 연구가 진행되어 왔다. 최근까지는 주로 측지 측량 분야에서 사용하였기 때문에 정확도 개선을 위한 연구 위주로 진행되었으며, 무결성 확보를 위한 연구는 아직 미비하다. 본 논문에서는 네트워크 RTK에서의 무결성 확보를 위한 기초연구로 네트워크 RTK 환경에 적합한 감시 시스템을 설계하였다. 이를 위하여 네트워크 RTK에서의 무결성 결함 조건을 도출하고, 각 결함 조건 별로 활용할 수 있는 이상 검출 및 식별 기법을 소 개하였으며, 이를 기반으로 네트워크 RTK를 서비스하는 중앙처리국에서 활용할 수 있는 감시 시스템을 설계하였다.
Trans Abstract
Network RTK is a precise positioning technique using carrier phase correction data from reference stations within the network, and is constantly being researched for improved performance. However, the study for the system accuracy has been performed but system integrity research has not been done as much as system accuracy, because network RTK has been mainly used on surveying for static or kinematic positioning. In this paper, adequate monitoring system for network RTK is designed as basis research for integrity monitoring on network RTK. To this, fault tree on network RTK is analyzed, and a countermeasure is prepared to detect and identify the each fault items. Based these algorithms, monitoring system to use on central processing facility is designed for network RTK service.
1. 서 론
위성항법 기반의 RTK(Real Time Kinematics)는 반송파 측 정치를 이용한 차분 보정 서비스로 단일 기준국 기반의 RTK 의 경우에 기준국으로부터 7km 이내의 기저선 거리를 갖는 사용자에게 수 센티미터 이내의 위치 정확도를 서비스할 수 있고, 네트워크 기반의 RTK의 경우에 기준국 간 거리가 50 - 70km일 때에 네트워크 망 안의 사용자에게 센티미터 수준의 고정밀 측위 서비스를 제공할 수 있다. 현재 국토지리정보원 에서 45개의 위성기준점을 설치·운영하고 있으며 45개의 상 시관측소를 사용하여 네트워크 RTK를 위한 전국망 보정 서 비스를 제공하고 있다(NGII, 2015). 과거에는 센티미터 수준의 고정밀도를 요구하는 측지, 측량 분야에서 주로 활용되었고 이를 위해 정확도 및 정밀도 개선을 위한 연구 위주로 진행되 었으나, 최근에는 육 해상 교통 환경, 선박의 통항안전, 정밀 접근, 항만항법, 해안선 조사 등과 같이 고성능을 요구하는 동 적 시스템에의 활용을 위해 많은 관심을 보이고 있다. 따라서 최근까지는 정확도 개선을 위주로 한 많은 연구가 진행되었지 만, 측위를 목적으로 한 동적 시스템에서 네트워크 RTK의 실 제 구현 및 적용을 위해서는 정확도(accuracy) 외에도 무결성 (integrity), 연속성(continuity), 가용성(availability)을 위한 연 구가 필요하다. 따라서 본 논문에서는 네트워크 RTK 환경에 서의 무결성 연구를 위한 기반기술로서, 다중 기준국 기반의 네트워크 RTK 환경에 적합한 이상 감시 시스템을 제안하였 다.
반송파 측정치를 활용하는 다중 기준국 기반의 네트워크 RTK에 영향을 미치는 요소들에 대한 이상 감시 기술 개발을 효과적으로 수행하기 위해서는 네트워크 RTK 컨셉에 대한 이해와 과거 발생한 이상 현상에 대한 사례분석이 필요하다. 따라서 본 논문의 2장에서는 네트워크 RTK 기법을 소개하고, 3장에서는 기존에 발생했던 이상 사례를 분석하고, 네트워크 RTK에서의 무결성 결함 조건을 도출하였다. 4장에서는 각 결 함 조건에 대응하여 적용할 수 있는 감시 기법과 설계한 네트 워크 RTK용 감시 시스템을 소개하고, 5장에서 결론을 맺었 다.
2. 네트워크 RTK 기법 소개
네트워크 RTK는 효과적인 정밀 측위 방법인 RTK에서 기준 국과 사용자 사이의 기저선 거리에 의한 한계를 줄이기 위한 것으로, 대표적으로 VRS(Virtual Reference Station) 기법, FKP(Flaechen Korrektur Parameter) 기법, MAC(Master Auxiliary Concept) 기법이 있다(Zinas, 2010). 이 중에서도 MAC 기법은 사용자 입장에서 보정정보를 활용하는 면에서 자유도가 높고, 기존 수신기 구조의 변경이 필요하지 않으며, 통신 채널에 대한 제약이 없다는 점에서 효과적인 기법이다. MAC 기법의 기본 개념은 Fig. 1과 같다.

MAC concept
Fig. 1은 4조의 기준국과 1조의 중앙처리국으로 구성된 네트 워크를 보인다. 이 때, 기준국 중에서 하나를 주-기준국으로 지정하고, 나머지 기준국은 부-기준국으로 명명한다. 기준국 은 정확한 위치를 알고 있는 고정 상태에서, GPS L1/L2 관측 치를 수집한다. 중앙처리국은 각 기준국으로 부터 관측치를 수신하고, 수신한 관측치를 사용하여 주-기준국과 부-기준국 간의 차이를 계산하여 보정정보를 생성한 후에, 이 보정정보 를 RTCM 3.x 메시지 형식으로 구성하여, 사용자에게 전달한 다. 사용자에게 전달하는 메시지는 기준국의 위치정보, 주-기 준국의 관측치, 주-기준국과 부-기준국 간의 이온층 관련 오 차와 비-이온층 관련 오차이며, 이 때 이온층 관련 오차와 비 -이온층 관련 오차는 주-기준국과 부-기준국 간의 차분치를 사용하여 생성할 수 있다(RTCM, 2007). 사용자는 주-기준국 의 관측치를 사용하여 이중차분 처리하고, 주-기준국과 부-기 준국 간에 전리층 관련 오차와 비-전리층 관련 오차의 보간 처리를 통해 사용자 위치에서의 공간이격오차를 도출하고, 제 거한다. 이 때, 보간 처리는 공간이격오차가 거리에 비례한다 는 가정 하에 LIM(Linear Interpolation Model), LCM(Linear Combination Model), LSM(Low Order Surface Modelling) 등을 사용한다(Zinas, 2010). 이와 같이 네트워크 RTK 기법을 통해 50-70km 범위의 네트워크 내에서 수 십 센티미터 수준 의 측위 정확도를 확보할 수 있다.
3. 네트워크 RTK에서의 무결성 결함 조건
3.1. 위성 이상 사례 분석
2000년도부터 현재까지 NANU(Notice Advisory to Navstar Users)에서 공지한 GPS 이상발생 건수는 Fig. 2와 같다 (CelesTrack, 2012). 그림에서와 같이 위성군이 BLOCK II로 대체되기 전인 2007년까지 보통 일 년에 10건 이상의 이상이 발생한 반면, 2008년 이후부터는 감소하는 경향을 보인다. 이 로부터 위성 고장사례의 가장 큰 요인으로 GPS의 노후화를 들 수 있으며, 현재 현대화 계획을 통해 계속적으로 개선하고 있는 실정이다.

The number of GPS NANU items
Table 1은 NANU에서 사전에 공지하지 못한 GPS 이상 발 생 사례이다(Shin et al., 2013)(Benton et al., 2014). 이상 발생 원인은 위성시계 이상, 위성궤도 이상, 항법메시지 이상이 가 장 대표적이다. 수신기 입장에서 볼 때, 위성 이상이 발생하면 해당 위성의 의사거리 오차가 증가하고, 코드 및 반송파 위상 측정치가 불안정한 상태를 보이며 불연속 지점이 발생하고, 측위오차가 증가하는 현상이 나타난다. 사용자 입장에서, 공지 된 GPS 이상 사례에 대해서는 대처할 수 있지만, 그렇지 않 은 경우에는 측위 서비스의 안정성이 저하되고 최종적으로는 서비스가 불가능하게 된다. 그러므로 응용분야에 따라 환경에 적합한 이상 감시 처리가 요구된다.

The non-noticed GPS anomaly list
3.2. 무결성 결함 조건 도출
네트워크 RTK 기법에서 사용자를 위한 고정밀 보정정보를 서비스하기 위해서는, 정확한 위치 정보를 알고있는 기준국에 서 오차 성분을 계산할 수 있어야 하고, 기준국과 사용자 간의 공간이격오차가 거리에 비례해야 한다. 하지만 이와 같은 가 정이 항상 성립하지는 않는다. 본 논문에서는 네트워크 RTK 기법에서의 무결성 결함을 유도하는 즉, 위의 가정이 성립하 지 않는 여러 환경 조건을 정리하였다. 네트워크 RTK 기법에 서의 무결성 결함 조건은 다음과 같다(Shin et al., 2015).
위성의 시계 고장으로 인한 이상 발생
항법메시지에서 궤도 파라미터 또는 위성시계 오차 보상 파라미터에 이상 발생
태풍이나 국지적 호우 발생으로 대기상태 불균형에 의해 기준국 간 대류권 지연 오차 변칙 발생
강한 태양 폭풍이나 이온층 섬광 등으로 기준국 간 이온층 지연 오차 변칙 발생
기준국 장비 이상 또는 통신 매체 이상으로 사용 가능한 기준국 수 감소 발생
무결성 결함 조건은 사용자 수신기의 고정밀 측위 서비스 품 질을 감소시키며, 따라서 사용자 입장에서는 위와 같은 무결 성 결함 조건을 배제하고 측위 서비스를 확보해야만 한다.
Fig. 3은 위의 내용을 바탕으로 한 네트워크 RTK에서의 결 함수(Fault Tree) 분석을 보인다(Shin et al., 2015). 그림을 통 해 무결성 결함 조건에 따른 체계를 정리하고, 무결성 분석에 영향을 미치는 고려 요소를 제시하였다. 이와 같은 분석결과 를 바탕으로 무결성 감시를 위한 감시 체계를 마련하고, 무결 성 분석을 위한 보호수준 도출에 활용하였다.
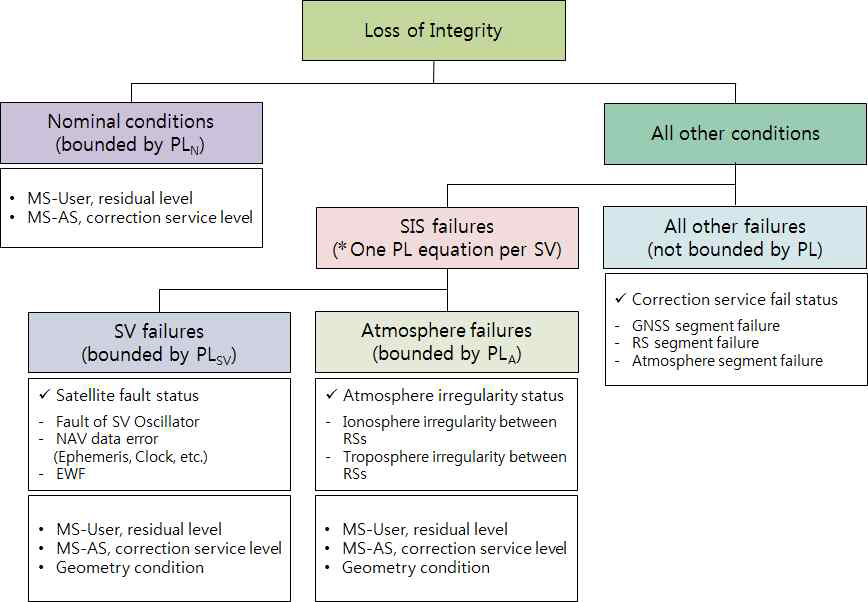
Fault-tree on Network RTK
4. 네트워크 RTK용 감시 시스템 설계
4.1. 네트워크 RTK 환경에 적합한 이상 검출 기법
무결성 분석을 위한 감시 체계 마련을 위하여 앞서 분석한 네트워크 RTK에서의 무결성 결함 조건 별로 이상 검출 기법 을 도출하였으며, 컨셉은 다음과 같다.
4.1.1. 위성 이상 검출
위성시계 및 하드웨어 고장으로 이상이 발생하면 고장 위성 의 의사거리 오차가 증가하고, 이는 수신기 단에서 코드 및 반 송파 위상 측정치의 불안정 및 측정치 잔차의 증가를 초래하 여 추적 손실 및 측위성능을 저하시키는 요인으로 작용한다. 이는 네트워크 RTK 환경에서 제대로 된 보강 서비스를 수행 할 수 없음을 의미하므로, 기준국 차원에서 위성 이상을 검출 하는 알고리즘 수행이 필요하다. 위성 이상 검출 알고리즘은 위성 별 코드 및 반송파 측정치의 잔차를 입력으로 사용하고, 패리티 공간벡터를 이용한 처리 기법에 근간하여 구현하였으 며, 알고리즘의 구성은 Fig. 4와 같다(Shin et al., 2013).

Satellite anomaly detection algorithm
항법메시지는 위성 궤도(Ephemeris) 정보, 알마낙(Almanac), GPS Time, 위성 시계 오차 보정계수 등을 포함하고 있으며, 이 파라미터들은 GPS 서비스의 주목적인 PVT(Positioning, Velocity, and Timing)를 제공하는데 근간이 되는 변수들이 다. 따라서 항법메시지 이상이 발생하면 GPS를 이용한 PVT 서비스를 제공하기 어렵거나, 또는 측위성능이 저하될 수 있 다. 따라서 다중 기준국 차원에서 항법메시지 이상을 검출하 는 알고리즘 수행이 필요하다. 항법메시지는 메시지 포맷이 정해져 있기 때문에 항법메시지 이상을 검출하기 위하여 고정 된 파라미터 체크 기능을 수행하였으며, 추가적으로 다중 기 준국 구조를 활용하여 기준국 간 항법 메시지 비교 기능을 수 행한다. 상용 수신기에서 일반적으로 체크하는 항목 이외에 추가된 감시 항목은 다음과 같다.
데이터 품질 검사 : Preamble 체크, TOW 카운트 체크, Subframe ID 체크, ‘0’ 비트 체크
항법메시지의 전송 정보 이상 체크 : 위성 궤도 정보, 알마 낙을 사용한 갱신 궤도력 체크
다중 기준국 간 항법 메시지 불일치 체크
4.1.2. 기준국 간 대기권 변칙 검출
태양폭풍이나 이온층 섬광 등에 의해 네트워크 영역 내에서 이온층 지연 오차가 불균일한 특성을 보이면, 네트워크 RTK 환경에서 서비스하는 다중 기준국의 보정정보의 시·공간 편차 가 증가하여 보정 서비스의 품질이 저하되고, 사용자 입장에 서는 보정 후 잔차가 증가하여 측위성능을 저하시키는 요인으 로 작용한다. 이러한 네트워크 영역 내에서 이온층 지연 오차 의 선형 특성이 성립하지 않는 경우를 기준국 간 이온층 지연 변칙 현상이라고 정의하였으며, Fig. 5와 같이 네트워크 영역 내에 소그룹 별로 이온층 지연 오차의 공간 편차를 비교·감시 하는 이온층 지연 변칙 검출 알고리즘을 구현하였다. 알고리 즘은 보정메시지 중에서 주-기준국과 부-기준국 간의 이온층 관련 오차를 입력으로 사용하고, 네트워크 내에서의 최소 기 준국 조합(3조)에 따른 소그룹 별로 이온층 관련 오차 성분의 X축, Y축에서의 기울기를 계산하여 공간 편차를 감시하는 구 조이다.
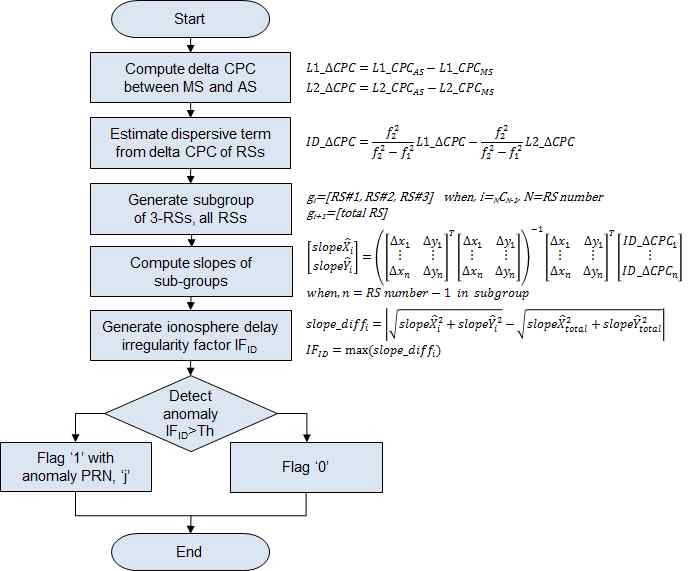
Ionosphere delay irregularity detection algorithm
50-70km 범위의 네트워크 내에서 기상 조건이 비슷하다는 가정 하에 네트워크 RTK 컨셉이 제안되었지만 이와 같은 조 건은 태풍이나 국지적 호우 발생 등과 같은 지역적 대기상태 불균형에 의해 성립하지 않는 경우가 발생하며, 특히 우리나 라와 같이 산악지형으로 구성되어있고, 여름에 태풍의 영향을 많이 받는 조건에서는 기준국 간 대류권 지연 편차가 크게 발 생한다. 네트워크 영역 내에서 대류권 지연 오차의 선형 특성 이 성립하지 않는 경우를 기준국 간 대류권 지연 변칙 현상이 라고 정의하였으며, Fig. 6과 같이 검출 알고리즘을 구현하였 다. 알고리즘은 네트워크 내에서 운용중인 기상청 중에서 기 준국 간 거리가 가장 먼 위치의 기상청을 LPP(Low Performance Point)로 선정하고, 기상청의 기상 정보를 사용 하여 추정한 대류권 지연 오차와 네트워크 RTK 컨셉으로 계 산한 대류권 지연 오차 간의 차이를 감시하는 구조이다(Han et al., 2014).
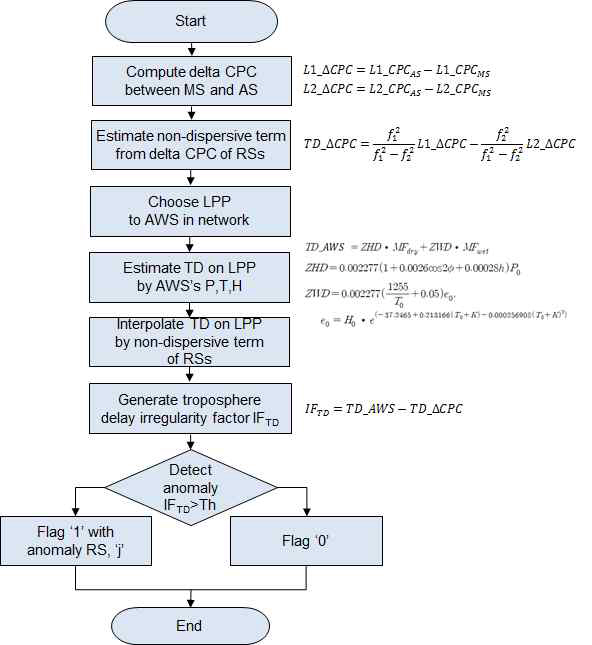
Troposphere delay irregularity detection algorithm
4.2. 네트워크 RTK용 기준국 감시 시스템 구성
4.2.1. NeRIM 시스템 구성 및 기능
앞서 소개한 네트워크 RTK에 적합한 이상 검출 기법을 적 용하여 네트워크 RTK 환경에서의 다중 기준국을 위한 감시 시스템을 설계하였으며, NeRIM(Network RTK Integrity Monitoring) 시스템이라 명명하였다. NeRIM 시스템의 구성은 Fig. 7과 같다. 입력 데이터는 GPS 수신기로부터 1Hz로 수신 한 코드 측정치, 반송파 위상 측정치, 항법 메시지와 같은 GPS 원시 데이터와 기상센서로부터 수신한 온도, 습도, 해면 기압과 같은 기상 데이터이다. NeRIM 시스템은 크게 수신기 와 기상 센서 제어 블록, NeRIM 운영 블록, 원시 측정치 품질 감시 블록, 이상 검출 블록, 이상 식별 블록으로 구성된다. 수 신기와 기상 센서 제어 블록은 다중 기준국으로부터 수신기의 원시 데이터와 기상 센서 데이터를 수집하고, NeRIM 운영 블 록은 수집한 데이터를 동기 맞춰 분류하고, 데이터베이스를 운영한다. 원시 측정치 품질 감시 블록은 이상 검출을 처리하 기 전의 전처리 단계로 가시위성 수, DOP(Dilution of Precision), 수신 신호 전력, 측정 잡음, 사이클 슬립 등과 같이 측정치 품질을 체크한다. 이와같은 처리를 통과한 선별된 측 정치를 대상으로 네트워크 RTK 환경에서의 항법신호 이상검 출을 위하여 위성에 의한 이상검출, 기준국 간 이온층 지연 변 칙 검출, 기준국 간 대류권 지연 변칙 검출, 항법메시지 오류 검출을 이상 검출 블록에서 수행한다. 마지막으로 이상 식별 블록에서는 앞서 수행한 이상 검출 결과를 바탕으로 이상 기 준국과 이상 위성을 식별하여 보정정보 생성 블록으로 알람을 전달한다.

Architecture of NeRIM system
4.2.2. NeRIM 시스템의 감시창
NeRIM 시스템은 네트워크 RTK 환경에서의 이상 검출을 위 한 감시가 주 목적인 시스템이므로, 감시창의 구성 또한 중요하 다. NeRIM 시스템의 감시창은 전체 감시창, 원시 측정치 품질 감시창, 위성 이상 감시창, 대기권 이상 감시창, 항법메시지 감 시창으로 크게 5개의 화면으로 구성되며, Fig. 8 - Fig. 12와 같 다. 전체 감시창은 위성 및 기준국의 상태 정보를 한 화면에서 확인할 수 있도록 구성하였고 발생한 이벤트를 조회하는 기능 을 포함하였다. 각 이상 감시창은 할당된 감시 목적에 적합하게 이상 현상에 대한 세부 분석이 용이하도록 차트와 그래픽을 사 용하여 구성하였다. Fig .9,10,11

NeRIM monitoring window

Navigation message monitoring window

Measurement quality monitoring window

Satellite anomaly monitoring window
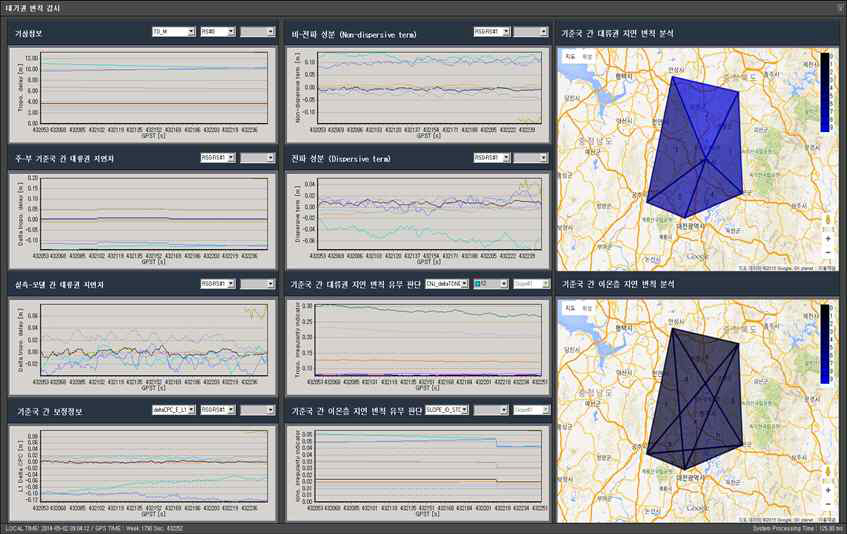
Atmosphere irregularity monitoring window
5. 결 론
본 논문은 네트워크 RTK 환경에서의 무결성 연구를 위한 기반기술로서, 네트워크 RTK의 컨셉과 기존 이상 현상에 대 한 사례 분석으로부터 네트워크 RTK에 적합한 무결성 결함 조건을 정리하고, 각 결함 조건에 대응하여 적용할 수 있는 이 상 감시 기법을 제시하였다. 이를 위해 위성 이상 검출, 항법 메시지 이상 검출, 기준국 간 이온층 지연 변칙 검출, 기준국 간 대류권 지연 변칙 검출 알고리즘을 제안하고, 이를 토대로 설계한 네트워크 RTK용 기준국 감시 시스템인 NeRIM 시스 템을 소개하였다. 이 결과는 추가적인 연구를 통하여 네트워 크 RTK에 최적화된 무결성 감시 및 성능 확보를 위한 이상 검출 기반기술로 활용될 수 있을 것으로 판단된다. 나아가 추 후에는 무결성 성능을 확보한 네트워크 RTK 서비스가 해양 항법 분야 전반에서 활용될 수 있을 것으로 예상된다.
후 기
본 연구는 국토해양부 교통체계효율화사업의 연구비 지원 (06교통핵심A03; PMS2920)에 의해 수행되었습니다.