자율운항선박용 선박중심직접통신(M-S2X) 주파수 탐색에 관한 연구
A Study on Frequency Spectrum Scanning for Maritime Autonomous Surface Ship’s M-S2X (Maritime-Ship to Everything) Communication
Article information
Abstract
급격하게 변화하고 첨단화 되어 가고 있는 해상운송 기술의 정점은 자율운항선박이 될 것으로 예상된다. 자율운항선박에서의 다양한 서비스의 구현은 선박 중심 네트워크인 S2X 통신체계를 통해서 가능할 것이다. 하지만 기존의 통신은 서비스 트래픽 포화, 요구 기능에 부합하지 못하는 등의 문제가 있어 추가적인 통신 기술의 선제적 도입이 필요하다. 본 연구에서는 자율운항선박에 적용될 S2X 통신의 개념을 재정립하고 요구 기능을 도출하여 최종적으로 활용이 가능한 주파수를 선정하였다. 이를 위해 도출된 통신 요구 기능에 적합한 후보 주파수 군을 도출하고 전문가 합의법을 통해 최종적으로 우선 적용이 가능한 통신 주파수를 선정하였다. 향후 해당 주파수에 대해 실험을 통한 검증 등 추가적인 연구를 통해 자율운항선박 서비스 구현에 활용이 가능할 것으로 기대된다.
Trans Abstract
The pinnacle of rapidly changing and advancing maritime transportation technology is expected to be the Maritime Autonomous Surface Ship (MASS). The implementation of various services within the MASS is likely to be feasible through the ship-centric network known as the S2X communication system. However, existing communication systems face issues such as service traffic saturation and failure to meet demanded functionalities, necessitating the proactive introduction of additional communication technologies. In this study, the concept of S2X communication for the MASS was redefined, deriving required functionalities and ultimately selecting frequencies suitable for utilization. Candidate frequency groups suitable for the derived communication requirements were identified, and communication frequencies prioritized for the initial application were chosen through expert consensus. It is anticipated that through further research, including experimentation to validate these frequencies, they could be utilized in implementing services for autonomous ship navigation in the future.
1. 서 론
해상에서의 여객 및 화물 등의 운송과 관련한 물류의 이동 기술은 근래에 아주 빠르게 변화하며 첨단화 되어가고 있다(Fonseca et al., 2021). 향후 해상에서 물류를 이동시키는 기술의 최정점은 자율운항선박이 될 것이라 예상된다(Jung et al., 2019). 국제해사기구(이하 IMO)에서는 자율운항선박(이하 MASS)을 “인간의 개입 없이 일정 수준의 운항을 할 수 있는 선박”으로 정의하였다(IMO, 2017). 그리고 IMO는 MASS의 등급을 4단계로 구분하였으며(IMO, 2018; Kang and Park, 2019), 항해사의 승선 여부에 따라 부분 자율운항 선박(Partial Autonomous Ship)과 완전 무인 자율운항 선박(Fully Autonomous Ship)으로 구분하였다(Lee, 2019).
한편, 도로 교통에서 첨단 기술의 집합체라고 할 수 있는 자율주행 자동차의 핵심기술은 ADAS라고 불리는 Advanced Driver Assistance System과 V2X(Vehicle to Everything) 통신시스템이라 할 수 있다(Kang and Park, 2019). 특히, 차량·사물 통신(V2X)은 자동차와 모든 것을 연결하는 기술로서 유무선망으로 차량에 각종 정보를 제공하여 Vehicle to Vehicle(V2V), Vehicle to Infrastructure(V2I), Vehicle to Pedestrian(V2P) 간 통신은 물론이고 차량 내 유무선 네트워킹(IVN: In-Vehicle Networking)을 총칭하는 개념으로서 전세계적인 협력과 개발이 이루어지고 있다(Muhammad and Safdar, 2018; Nadeem Ahangar et al., 2021). 이와 마찬가지로 자율운항선박의 구현을 위해서는 선박의 내부, 외부에서의 통신 인프라 제공이 필수적으로 이루어져야 하며 자율운항선박의 도입을 위해서 해상통신기술은 다음의 방향으로 개발이 되어져야 할 것이다.
· 선박 내부의 지속적이고 신뢰성이 보장되는 무선 기반 선내 통신 네트워크
· 이중화 개념 도입으로 백업을 통한 신뢰성 확보, 사이버 보안 대응 방안 수립
· 대용량 데이터 전송 등이 가능하여 기존 IoT 센싱 데이터 전송 가능 수준을 넘어서는 미래 수요 대응이 가능한 무선 네트워크 확보
· 선박에 적용 가능한 센서들의 스마트 체계와 함께 센서 네트워크 구성을 가능하게 하는 통신 기술과의 융합 시스템 기술
· 네트워크 운용에 신뢰성을 갖는 선박 센싱 통합 시스템 및 네트워크
· 국제적 사용이 가능하고 적정 수준이 보장되는 상용 통신망 활용
한국은 ‘한국형 e-Navigation 구축사업’에 따라 2021년부터 세계 최초로 초고속 해상무선통신망(LTE-M)을 연안 100km 범위까지 구축하였고 평균 10Mbps 이상의 통신 속도로 데이터 전송이 가능하다. 이러한 통신 플랫폼을 통해 IMO에서 요구하는 e-Navigation 필수 서비스는 물론 한국의 해상교통에 특화된 서비스를 제공하고 있다(Kang, 2020; Kim and Ko). 하지만 LTE 특성상 선박에서 송수신하는 Data가 육상 기지국을 거쳐서 타 선박과 육상에 전달되는 시스템 즉, 인프라 중심의 단편적인 통신시스템이라고 볼 수 있다. V2X와 마찬가지로 Ship to Ship, Ship to Infrastructure, Ship to Network 등 자율운항선박의 구현에 필요한 궁극적인 Ship to Everything(이하 S2X) 통신 시스템의 개념과 기술의 개발은 여전히 풀어야 할 숙제로 남아 있다.
본 연구는 자율운항선박의 도입에 필수적인 S2X 통신 시스템 구현을 목적으로 하고 있다. 자율운항선박에 적용 가능한 광대역 기반의 Maritime-S2X(이하 M-S2X) 통신기술의 구현과 다양한 자율운항선박 서비스 구현을 위해서는 국제적으로 사용이 가능하고 적정 수준이 보장되는 통신망의 활용이 필요하다. 이는, 다른 말로 전 세계적인 주파수 사용을 보장할 수 있으면서 적정한 대역폭의 주파수 확보가 필요하다는 것을 의미한다. 이에 따라 본 논문에서는 자율운항선박에 적용할 통신기술의 요구 기능을 우선 분석하였다. 그리고 M-S2X의 안정적 구현을 위해 요구 기능에 적합한 후보 주파수군을 탐색하고 전문가 합의법 등을 통해 자율운항선박 구현에 적정한 주파수를 제시하고자 한다.
2. 통신기술 동향 분석
선박에 탑재된 무선통신장비는 국제해상인명안전협약(SOLAS)에 따라서 요구 기능과 사양이 정해지며 SOLAS 협약 적용 대상선박은 항해 범위에 따라 필요한 무선통신설비를 갖추도록 하고 있다. 그러나 최근 기술이 급속히 발달하게 되면서 IMO는 자율운항선박 등 미래기술에 대한 요구 기능 등을 정의하고 있는데 해상에서의 고도화된 통신기술 또한 선박과 인명의 안전뿐만 아니라 자율운항선박에 필수적인 기술로 자리매김 하고 있다. 한편, 도로교통에서는 자율주행 자동차 도입 이전부터 통신기술의 중요성이 강조되어 왔으며 V2X 통신기술은 자율주행자동차의 핵심기술이 된다.
본 장에서는 자율운항선박 적용 통신 주파수를 탐색하는 사전 단계로서 해상교통과 도로교통에서 사용 중인 통신 주파수와 기술을 분석하고자 한다.
2.1 해상에서 사용되는 통신 주파수 및 기술 분석
2.1.1 AIS / ASM 기술(국제표준 ITU-R M.1371-5, M.2092)
선박자동식별장치(Automatic Identification System, AIS)는 선박의 항해안전 및 보안강화를 위하여 IMO가 중심이 되어 표준화 작업을 진행하였다. 2000년 12월 최종적으로 해상의 주요 통신 기술로 채택되어 VHF 대역의 Channel 87(161.975㎑)과 Channel 88(162.025㎑)을 AIS 전용 주파수로 할당하여 운용 중이다. AIS는 채널 1개를 2,250개의 슬롯으로 나누어 사용하고 있다(Lee et al., 2013; Kim et al., 2014). AIS의 통신방식은 선박-선박, 선박-육상 간 Data 통신으로 선박의 제원, 출항지 및 목적지 등의 정보를 자동으로 송수신할 수 있고, 선박 위치, 선속 및 침로 등의 운항정보를 자동 송수신함으로써 관제 수단으로 활용이 가능하다. 또한 AIS는 선박 간에 자동으로 식별이 가능하여 선박 충돌 예방의 역할과 비상시 수색 및 구조활동 지원, 선박 항해 안전 정보 제공 등의 기능을 수행한다. 다만, 선박간, 선박과 해안 기지국간의 통신을 위해 해상용 이동 주파수 대역 내의 VHF 주파수 채널(87, 88)이 2개만 사용하므로 동시에 다수의 선박이 접속할 경우 Traffic에 제한이 있으며, 각 채널의 데이터 전송률이 9.6kbps이므로 다량의 정보를 주고 받는 것은 불가능하다. 그리고 단말기 중심이기 때문에 AIS를 탑재하지 않은 선박에 대해서는 충돌 방지 등의 효과가 없다.
ASM(AIS Application Specific Messages)은 ASM1 (2027)과 ASM2 (2028) 2개의 채널을 사용한다. 적은 용량의 텍스트 메시지를 전송하기 위해 2001년에 AIS에 추가된 이후 2010년 ASM 사용이 표준화 되었다. 현재는 ASM 사용이 매우 대중화되어서 많은 지역에서 AIS 시스템의 Traffic에 심각한 혼잡을 가중 시키고 있다(Choi and Ahn, 2017).
2.1.2 VDES 기술(국제표준 ITU-R M.2092)
VDES(VHF Data Exchange System)는 해상에서 VHF 대역 무선통신을 통해 선박과 선박, 선박과 해안국 간 AIS, ASM, VDE 데이터를 송수신하는 차세대 해상무선통신시스템이다(Kim and Ko, 2020). 최근 IMO와 각 국가에서 추진 중인 GMDSS 현대화 및 e-Nav. 체계 구축을 위해 확장된 데이터의 교환이 가능하고 AIS의 VHF 대역 Data Link 과부하 문제를 해결하기 위해 도입되었다. 먼저 VDES는 AIS 및 ASM을 포함하고 있으며 AIS를 최우선에 둔다. 또한 위성 업/다운링크 채널을 포함하고 높은 변조 방식을 사용하는 새로운 데이터 채널로 정의된다.
해상에서 사용되는 통신 주파수 및 기술에 대한 규격 비교는 Table 1과 같다.

Standards comparison for maritime wireless comm.
2.1.3 LTE-M 기술
IMO에서 추진한 e-Navigation 체계에 따라 우리나라는 2015년부터 한국형 e-Navigation 사업을 추진하였다. 한국형 e-Navigation은 기존 IMO의 필수 서비스에 어선 및 연안소형선박 대상 서비스 등을 추가한 형태로 가장 큰 특징 중 하나는 우리나라 연안에 초고속 해상무선통신망인 LTE-M망을 구축했다는 것이다(Lim and Cho, 2018). LTE-M은 공공안전 통신망 주파수로 할당된 700 MHz 대역을 이용하고, 우리나라 연안 100km까지 통신이 가능하며, 1 Mbps ∼ 10 Mbps 이상의 다운로드 속도를 지원한다(Song and Lee, 2017; Cho and Lee, 2017).
2.2 도로교통 등에서 사용되는 통신기술 분석
2.2.1 C-ITS에 적용되는 통신기술
국토교통부와 과학기술정보통신부는 ‘차세대지능형교통체계(C-ITS)’의 전국 구축계획에 대해 협의를 완료하였고, C-ITS 공동작업반을 구성하여 전국에 C-ITS를 구축할 예정이다. 세부적으로는 LTE-V2X 방식을 2022년까지 실증하고 2023년까지 일부 고속도로에 차량용 무선통신(Wireless Access for Vehicle Environment, WAVE)과 Cellular 기반 V2X의 병행 방식(WAVE+LTE-V2X)으로 시범사업을 수행한다. 2024년 이후에는 이를 전국으로 확산하는 단계적 계획을 수립하였다. C-ITS 기술표준에 대해서는 현재까지 논의가 진행 중이다. 공동작업반은 C-ITS의 주요 통신기술로 WiFi 기술(IEEE802.11a) 기반 단거리 전용 통신(Dedicated Short-Range Communication, DSRC)을 업그레이드한 표준 WAVE(IEEE802.11p 기반)와 5G-V2X 활용을 검토하고 있다(Kang, 2020; Saqib Hakak et al., 2022).
국제적으로 미국, 중국 등 주요국에서는 V2X 기술방식으로 C-V2X를 단일표준으로 선택하였다. 미국 연방통신위원회(Federal Communications Commission, FCC)는 5,850∼5,925MHz(75MHz)를 ITS용 주파수로 분배하고, DSRC 기술의 도입 준비를 위해 2016년부터 차량에 V2V 통신장비를 의무화하는 법안을 추진하였다. 유럽은 2008년에 유럽전기통신표준협회(European Telecommunications Standards Institute, ETSI)에서 5,855∼5,925GHz(70MHz) 주파수를 분배, 5.9GHz 대역을 C-ITS 용도로 배정하고 WAVE 중심의 하이브리드(WAVE+5G-ITS)로 서비스를 제공 중이다. 일본은 755.5∼764.5MHz(9MHz) 주파수를 배정하였고 5.8GHz 대역에서 도로의 통행료 징수 및 정보 서비스를 제공한다. 2016년부터는 760MHz에서 V2V와 V2I 통신방식의 ITS Safety 상용 서비스를 시작하였다.
이와 같이 국제적으로 C-ITS의 표준은 IEEE802.11p 기반의 WAVE 방식과 Cellular 기반의 C-V2X 방식이 있다. WAVE는 현재 ITS의 통신 방식으로 사용 중인 IEEE 802.11a를 기반으로 하는 DSRC가 진화한 것인데 역시 IEEE 표준이며, C-V2X는 Cellular 기술을 이용하는 것으로 3GPP(3rd Generation Partnership Project) 표준이다(Nadeem Ahangar et al., 2021).
Table 2는 도로교통의 C-ITS에서 적용 예정인 WAVE와 C-V2X 기술의 비교표이다.

Comparison for C-ITS comm. technology
2.2.2 WiFi 기술
WiFi는 가장 많이 사용되는 무선 기술 중 하나로서 ISM(Industry Science Medical) 대역을 사용하기 때문에 주파수 사용 비용이 없고, 일반 이동통신 보다 큰 주파수 대역폭(예, 20MHz, 40MHz, 80MHz 및 160MHz)을 사용할 수 있어서 최대 전송속도를 높일 수 있다. 많은 상용 단말기가 WiFi를 지원하고 있어서 사용자가 별도의 단말기를 구입 하지 않아도 된다는 장점이 있다. CCTV나 이동통신의 유선 백홀(back haul)을 대체하는 PTP(Point to Point)에서는 수 km에서 수십 km 거리에서 수십 Mbps를 지원하기도 하며, 사물인터넷(Internet of Things, IoT)에도 WiFi를 사용한 센서들을 이용해서 근거리통신망(Local Area Network, LAN)을 구성하고 있다. 다만, WiFi는 ISM 비면허 대역을 사용하기에 상호 간섭을 줄이기 위해 일반적으로 출력을 낮추어서 근거리 통신으로 사용된다는 특징이 있다.
3. M-S2X 개념 정립 및 요구분석
해상교통에서 선박의 자율운항을 구현하기 위해서는 자동차의 ADAS와 같은 첨단 운항자 지원 시스템, 그리고 선박과 선박, 선박과 육상을 연결할 수 있는 통신시스템이 반드시 필요하다. Kang and Park(2019)에서는 선박 운항자 중심의 네트워킹(S2X) 통신 기술의 개념 정립 필요성을 제기하면서 자율운항선박의 주변 상황인식에 필요한 선박 대 선박 통신에 활용 가능한 AIS 등의 포화 상황으로 인해 추가적인 통신 기술의 선제적 도입을 제시하였다.
본 장에서는 Ship to Ship, Ship to Infrastructure, Ship to Network 등 자율운항선박의 구현에 필요한 긍극적인 Ship to Everything(S2X) 통신기술이라 칭할 수 있는 선박 중심 네트워킹(M-S2X)의 개념에 대해 재정립하고자 한다. 또한, M-S2X를 바탕으로 해상에서 진보된 무선통신 기술 개발을 위한 전문가 의견 기반 요구사항을 분석하고 각 운용 모드별 기준을 제시하였다.
3.1 필요성 및 개념 정의
Kang and Park(2019)과 같이 앞서 언급한 선박을 중심으로 하는 다양한 직접통신을 통칭하여 M-S2X 통신이라 할 수 있다. Ryu et al.(2018)은 자율운항 및 무인 기능이 요구되는 새로운 선박 안전 패러다임에 대응하여 선박중심 직접통신이라는 용어 정의 및 중요성을 제시하고, 고 주파수 기반의 광대역 통신기술을 활용하는 Mx-S2X 통신 개념을 정의하였다. Kim et al.(2022)는 고 주파수 기반의 광대역 통신기술을 활용하는 M-S2X의 중요성과 활용 가능성을 제시하였고. 고 주파수 기반 M-S2X의 물리계층을 구현하고 성능을 분석하였다. Ship to Ship, Ship to Infrastructure, Ship to Network 등 자율운항선박의 구현에 필요한 긍극적인 해상에서의 선박 중심 직접 통신이라 할 수 있는 M-S2X는 디지털 통신 연계기술 개발 및 실증을 통해 육상·선박·시설의 유기적 연결을 제공함 으로써, 향후 도래할 자율운항선박 및 유·무인선 혼재 운항 상황에서 해상통신 인프라로서의 효과적 활용이 가능할 것으로 분석된다. 선행연구에서 제시한 M-S2X의 개념은 Fig. 1과 같다.

Definition of M-S2X communication
M-S2X 통신 서비스 내에서는 다양한 Device 간의 긴밀한 연결을 기본으로 한다. 선박 대 선박, 선박 대 육상, 선박 대 모바일(사람), 선박 대 AtoN 그리고 최근 다양하게 활용되고 있는 Air Craft나 Drone 등이 될 수 있다. 그리고 해상에서의 인명 및 선박의 구조를 담당하는 해양경찰 등 공공 선박과의 통신 등도 포함될 수 있다. 여기에서 SOLAS 선박 또는 Non-SOLAS 선박간 통신은 교신 대상 선박의 의무 설치 규정에 부합하는 통신 시스템을 이용하여 음성 또는 데이터 통신을 수행한다. 또한 각 Device 간 음성/데이터 통신이 가능하여야 하며 선대의 형태로 군집하여 운항하는 선단 내 모선 대 자선 간 데이터 통신에 활용할 수 있어야 한다. 따라서, M-S2X 통신 내에서 운용은 ① 선박의 일반 항해상황에서의 통신, ② 선박 및 Device 간 음성지원, ③ 군집하여 통항하는 선단이 집단 기동시 통신 그리고 ④ 공공 선박인 해경 등 단정 운영 시 통신 등으로 구분할 수 있고 각각의 모드에서 적용되는 서비스에 따라 통신환경과 기준을 달리 할 수 있다.
3.2 요구 기능 분석
지난 2012년에 보고서를 발간한 MUNIN 프로젝트에서는 자율운항선박의 운용에 필요한 통신 요구사항을 분석하여 자율운항선박에 유인선박이 접근하는 Rendezvous, Remote Control, Telemetry, Radar Targets 및 HD Video를 위해 최소 통신 한계에 대한 요구사항을 Bandwidth의 경우 2 kbps ∼ 3 Mbps로, Latency는 50 ms ∼ 2.5 sec. 등과 같이 정의하였다(MUNIN, 2012).
MUNIN이 제안한 Rendezvous, Remote Control 등 통신 요구사항은 상당히 낮아 보이나 당시에 적용 가능한 통신기술의 한계에 기인한 것으로 보인다. 최근에 개념 정의나 자율운항선박 기술개발 및 서비스 개발에 따른 상황 인식, 수집 정보 교환 수요 육상 모니터링을 고려하면 그 기준은 상당히 부족해 보인다. Namgung(2019)에 따르면 항구, 항만에서의 VTS 교신의 중요성, 충돌회피와 센서 정보 수집 등을 고려하여 자율운항선박 한 척당 약 0.8MHz의 스펙트럼이 요구됨을 제시하고 한국의 주요 항구에서 선박 분포를 통합 적용하여 다운링크 기준 11.3MHz, 업링크 기준 103.9MHz의 스펙트럼이 요구됨을 제시하였다. 육상으로의 데이터 전송인 업링크 요구량이 많으며 이는 아직 자율운항선박의 자율성이 높지 않고 육상에서의 모니터링 중요성이 높기 때문이다.
지난 약 20년 간 해상에서 선박의 안전 운항을 위해 광범위하게 사용되어 온 AIS는 통신 과부화 문제를 안고 있다(Kang and Park, 2019). 이러한 AIS traffic의 과부하를 해결하고 자율운항선박의 통신 인프라 확충을 위해 e-Navigation과 VDES 등의 국제표준화가 활발하게 진행 중이다. 또한 도로교통에서는 자율주행을 위한 V2X 통신 기술로 WAVE, DSRC, C-V2X 등의 통신 기술이 고려 중이다.
본 연구에서는 이러한 현재의 기술 개발 현황 등을 바탕으로 요구 기능을 분석하였고 추가로 통신 분야의 전문가를 대상으로 통신 기술의 이용자 및 선박 상황별로 요구되는 사양과 전송 속도, 통신범위 등의 M-S2X 통신 요구 기능에 대한 분석을 시행하였다. 전문가를 통한 분석은 전문가의 주장 또는 의견을 파악하기 위해 개방형(주관식) 문항으로 자유롭게 응답할 수 있게 하였다. 전문가 의견은 크게 해상에 적용되는 통신시스템을 개발하기 위해 검토해야 하는 내용과 적용할 통신의 최소 통신 한계 및 주파수 등에 대한 내용이 수렴되었다. 자율운항선박의 주변 상황인식에 필요한 선박 대 선박 통신에 활용 가능한 통신은 ① 선박간 데이터 통신지원, ② 선박간 충돌예방지원, ③ 선박간 음성통시 지원, ④ 선박간 호출지원을 요구기능의 주요 목표로 두어야 하는 것으로 제시하였다. 또한, 자율운항선박에서의 적용을 고려하여 Use case를 일반 선박항해, 선박 간 음성지원, 선대 운용(드론포함), 공공 선박운영 등의 서비스 형태로 적용 가능한 Use case를 제시하였다.
3.3 요구 기능 정의
자율운항선박 Level 3, 4단계의 선박이 통항하는 시대의 해역에서 해양사고 방지 및 해운운송을 포함한 해사의 효율을 높이기 위해 선박 대 선박, 선박 대 육상 인프라 또는 해상에 위치하는 위험 요소 간의 통신 기능을 통해 네트워크에 연결되어 있어야 한다. 또한 한국의 경우에는 연안 100km까지 LTE-M 네트워크 망이 구축되어 있기 때문에 이를 활용하여 정보를 교환하는 대상 장비 식별 및 LTE-M. 장비와의 연계를 통해 해상 교통체계 스마트화를 이루기 위한 요구 기능을 분석하여야 한다. 본 연구에서는 기술의 특성상 폐쇄적인 요구 분석 방법을 활용하여 국제 표준 분석과 전문가 의견수렴을 통해 요구 기능 분석을 실시하였다. 그리고 자율운항선박의 주변 상황인식에 필요한 선박 대 선박 통신에 활용 가능한 AIS 등의 포화상황으로 인해 추가적인 통신 기술의 선제적 도입을 고려하여 다음의 선박간 데이터 통신지원, 선박간 충돌예방 지원, 선박 간 음성통신 지원, 선박간 호출지원 등 4가지 주요 요구기능과 Use case를 정의하였다.
이를 바탕으로 M-S2X 개념 분석시 도출한 운용모드(선박의 일반 항해상황, Device 간 음성지원, 선단의 집단 기동시 통신, 공공 선박인 해경 등 단정 운영 시 통신)를 기준으로 각각에 적용되는 기준과 음성, 데이터, 사진, 영상 등 이용자 및 선박 상황별 요구사양(전송속도, 통신범위)을 분석하여 제시하였다. M-S2X의 운용모드에 따른 요구기능 분석은 Table 3과 같다.
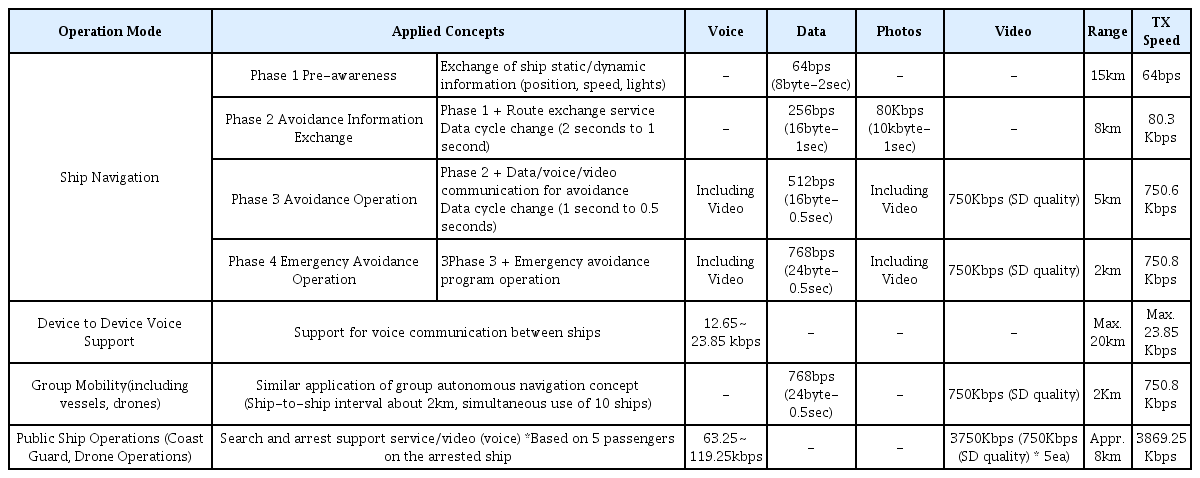
Analysis of M-S2X operation modes and required functions
선박의 일반 항해 중에는 1~4단계로 구분하여 필요 요구기능을 구분하였다. 1단계와 2단계는 8km 이상의 통신범위가 요구되는 타 선박의 정적 및 동적 정보를 교환하고 회피를 위한 정보를 교환하는 단계로서 요구 전송속도가 약 80kbps이며 기존의 AIS 및 ASM(Application Specific Messages)과 차별성이 없어 기존 장비를 활용하는 것으로 제시하였다. 3단계와 4단계는 회피 동작에 직면한 근접거리 상황에서 음성 및 영상 통신을 위한 요구기능을 제시하였고 이때는 수 Mbps 이내의 영상 데이터 등을 주고받아야 하므로 현재의 통신기술을 상회하는 기술의 개발과 적용이 필요한 것으로 도출하였다. 종합하여, M-S2X는 D2D(Device to Device) 통신 기능과 LTE-M망 등을 활용한 근거리 해상통신 Network를 구축하여 Ship to Everything 통신이 가능하게 지원이 되어야 한다.
4. 자율운항선박용 M-S2X 통신 주파수 선정
현재 해상 모바일 서비스 지정 대역인 VHF대역에서 사용 가능한 VDES 통신은 AIS, ASM 기능을 포함하면서 동시에 VDE 기능을 추가한 시스템으로 ITU 국제 표준으로 기술적 사양에 관한 표준이 초안 완성되었으며 최대 300kbps 급의 성능을 갖고 있다. 그보다 더 높은 통신 요구사항 수용을 위한 고대역에는 아직 해상 모바일 서비스 용도로 할당된 주파수가 없는 실정이다. S2X 통신은 AIS 등 기존 해상 통신보다 높은 성능을 가져야 하므로 VDE 기술 또는 이보다 빠른 통신을 가능하게 하는 고 주파수에서의 광대역 기반 통신 기술을 사용해야 한다. 따라서, 활용 가능성이 높은 주파수들을 대상으로 M-S2X 통신을 구현할 수 있는 고대역 통신기술 적용이 가능한 주파수를 탐색할 필요가 있다.
본 장에서는 앞에서 제시한 운용모드에 따른 요구 기능을 만족하는 기술 개발을 위해 적정 주파수를 탐색하고 선정하고자 한다. 현재 사용이 가능한 통신 주파수 중에 가장 적합하다고 판단되는 통신 주파수를 선정하였다.
4.1 Delphi 기법
Delphi 기법은 관련 전문가의 경험적 지식을 바탕으로 문제 해결 및 미래예측을 위한 기법이다. Delphi 기법을 다른 말로 전문가 합의법이라고도 한다. 전문가들의 의견 수립, 중재, 타협의 방식으로 몇 번의 반복적인 피드백을 통해 의견을 도출하여 문제를 해결하는 기법으로 1964년 미국에서 고안되었다. 추정하려는 문제에 관한 확실한 정보가 없을 때에 "두 사람의 의견이 한 사람의 의견보다 정확하다"는 계량적 객관의 원리와 "다수의 판단이 소수의 판단보다 정확하다"는 민주적 방식의 의사결정 원리에 근거를 두고 있다(Yoo and Choi, 2018; Kang and Kim, 2023).
본 연구에서는 자율운항선박 시대에 새롭게 요구되는 기능을 선정하는 것과 도출된 요구 기능에 적합한 주파수 후보군을 도출하는데 목적을 두고 Delphi 기법을 활용하였다. 새롭게 요구되는 통신기술의 기능적인 요건은 개방형(주관식) 질문으로 전문가의 의견을 수렴하였고 주파수 후보군을 도출하는 것은 현재 활용 가능한 통신 주파수 내에서 선정 하였으므로 구조화 및 조직화 되어 있는 설문지를 통해 설문을 하는 방식으로 활용하였다. 본 연구에서 사용된 주파수 발굴 절차와 전문가를 활용한 Delphi 분석 flow는 Fig. 2와 같다.
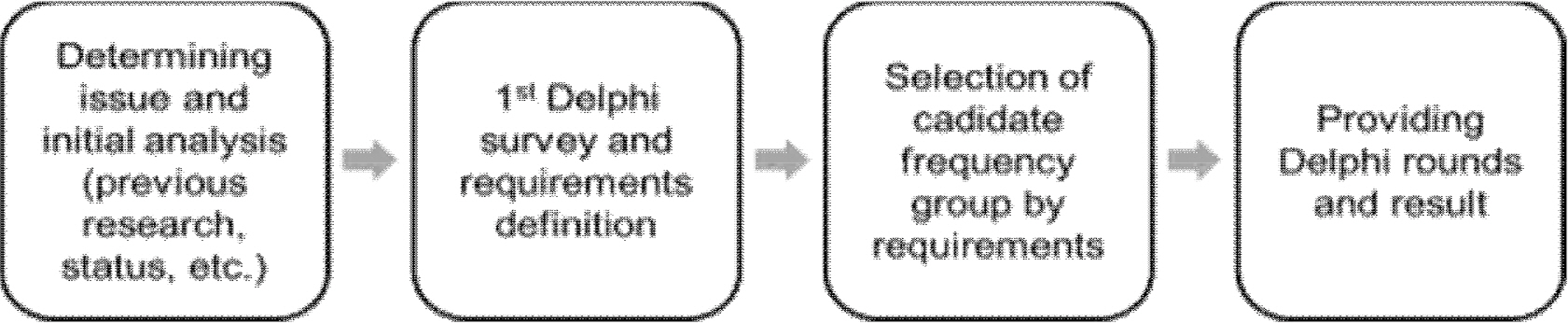
Delphi survey flow
델파이 조사의 대상이 되는 문제해결과 예측을 다음과 같이 제기한다.
첫 번째, 주파수 정책에 부합하고 주파수 확보(주파수 이용 용이성 등)와 기술개발(이용 복잡성 등)에 용이한가?
두 번째, M-S2X 요구 기능(전송속도 등)에 적합하고 선박 간 통신 서비스 용도(이동성 등)에 적합한가?
본 연구는 자율운항선박에 적용하기 위한 통신 기술의 적정 주파수를 탐색하기 위한 연구이다. 개방형 설문을 통해 기술 요구 기능에 대해 정리하였고 이를 바탕으로 현재 사용 중인 주파수 중에 적정 주파수를 선정하는데 목적을 두고 설문지를 구성하였다. 평가분야의 경우 주파수 정책 부합성, 기술 개발 정도와 M-S2X 특성을 고려한 평가 요소를 선정하였다. 이에 따른 세부문항은 평가 분야와 평가 지표의 내용을 바탕으로 주파수 선정에 결정적인 요소가 된다고 판단되는 내용의 세부문항을 정리하였다. 평가 영역 및 세부 문항 항목은 Table 4와 같다.
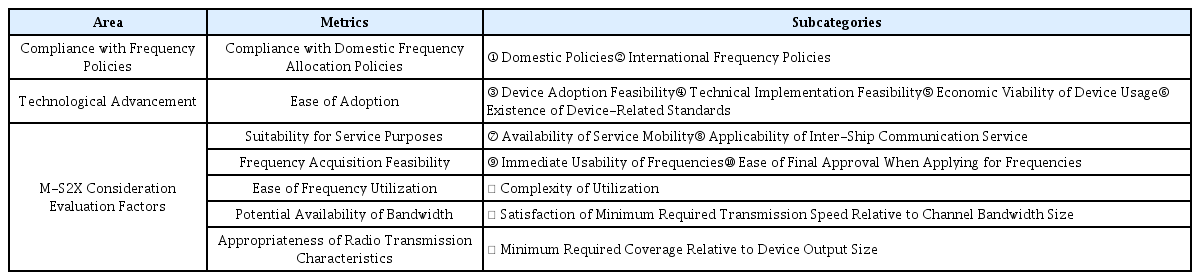
Selection of evaluation areas and subcategories
통신 기술의 이용자 및 선박 상황별로 요구되는 사양과 전송속도, 통신범위 등의 M-S2X 통신 요구 기능에 대한 분석은 해상의 상황을 이해하고 있는 Table 5와 같은 통신 분야의 전문가를 대상으로 경험과 전문성을 바탕으로 분석이 되었다. 구조화된 설문지를 통해 응답을 받을 수도 있지만 응답자의 반응 범위가 줄어들어 결과가 제한적일 수 있다. 따라서 전문가를 대상으로 전문가의 주장 또는 의견을 파악하기 위해 개방형(주관식) 문항으로 자유롭게 응답할 수 있게 하였다.
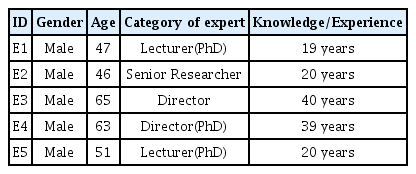
Experts profile
2차 설문부터는 전문가가 Table 4에서 선정된 평가 영역에 대한 구조화된 설문지를 통해 각 세부문항에 대한 5점 리커트(Likert) 척도(5=매우 적절함, 4=적절함, 3=보통, 2=적절하지 않음, 1=매우 적절하지 않음)를 제시하여 점수를 표시할 수 있도록 하였다. 또한 각 세부문항 마다 의견란을 제시하여 작성할 수 있도록 하였다. 따라서 설문은 총 2차에 걸쳐 조사가 되었으며, 1차 델파이 조사 기간은 2021년 10월 19일∼10월 26일이며, 총 5명의 전문가 패널에 의해 이루어졌고, 2차 델파이 조사 기간은 2021년 11월 17일∼12월 3일이며, 총 5명의 전문가 패널에 의해 이루어졌다. 1차 델파이 조사(주관식, 개방형 설문)를 실시하여 도출된 결과를 분석한 후 전문가 패널의 의견을 반영하여 구조화된 설문지를 구성하였다. 이후 2차 델파이 설문조사를 실시하였고, 이에 대한 자료를 수집하였다.
4.2 주파수 선정 개요
본 연구의 목적에 맞는 M-S2X 통신 적용 주파수는 전문가의 전문적 견해를 바탕으로 Delphi survey를 통해 이루어진다. 하지만 모든 대역의 통신 주파수를 대상으로 survey를 하는 것은 효율적이지 않으므로 2장에서 도출된 요구 기능에 적합한 후보 주파수 대역을 우선으로 도출하였다. 후보 주파수 대역의 도출은 다음의 단계에서 이루어진다.
1단계에서는 과학기술정보통신부에서 정하고 있는 주파수 분배표를 활용하여 235MHz에서 10GHz 주파수 범위 내에서 개별 주파수 대역에 대해 M-S2X 이용을 위한 적합 주파수 선별 과정을 진행하였다. 그리고 M-S2X 서비스 구현을 위해 M-S2X 최소 요구사항인 전송속도 3Mbps 이상을 고려하여 이용 가능할 것으로 예측되는 후보 주파수를 도출하였다. 요구되는 데이터 전송 속도(3Mbps)를 만족하기 위해 필요한 주파수 대역폭은 샤논의 법칙을 사용해서 예측이 가능하다. 샤논의 법칙에 따르면, ‘통신 시스템에서 채널 용량은 수신단에서의 신호 대 잡음비(SNR, Signal to Noise Ratio)에 따라 결정된다’로 정의되며 이를 식으로 표현하면 식 (1)과 같다(Lee and Kim, 2021).
여기서, C : Channel Capacity, W : 가용대역 폭
S : 수신 신호 전력, N : 잡음전력
R : 정보 전송률
본 연구에서는 보호대역(Guard Band) 및 향후 데이터 송신 속도의 향상 등을 고려해서 최소 6MHz 수준의 사용 가능 주파수를 발굴하기로 결정하였다. 즉, 전송속도 3Mbps 달성 가능 여부 판단을 위해서는 주파수 대역별로 제공 가능한 채널 대역폭 크기가 6MHz 이상인 경우를 고려하여 후보 주파수를 도출하였다.
2단계에서는 M-S2X 요구 최소 전송거리인 2km 이상을 만족하는 후보 주파수를 선별하였다. 즉, 관련 기술기준 등에서 제시하는 주파수 대역 크기 및 등가등방성복사전력 값, 관련 전문가의 경험적 판단을 바탕으로 후보 주파수 도출을 진행하 였다. 전송 가능한 거리는 Link Budget을 사용해서 예측할 수 있다. Link Budget은 송신세기, 전송 손실, 수신세기 및 수신 감도(Rx Sensitivity) 등으로 구성되어 있다(Park, B. H. and Ryu, H. G., 2022; Choi et al., 2023).
송신 가능한 거리(distance, d)는 송신기의 출력 EIRP와 수신기의 수신감도 (Rx. Sensitivity)의 차이에 의해 결정이 된다. 이 값은 허용 가능한 전송 손실 (Path Loss)이며, 식 (2) ∼ (4)에서 송신 주파수와 송수신 안테나 특성을 고려하면 구할 수 있다.
여기서, λ : 전파의 파장(길이),
(λ/4πd)2 = -L : 자유공간에서의 전파손실,
f : 전파의 주파수, c : 전파의 속도(300,000km/s),
Pr : 수신 세기, Pt : 송신 세기,
Gr : 수신 안테나 이득, Gt : 송신 안테나 이득
통신 거리의 목표가 2 Km 로 되어 있으므로, 식 (4)를 이용하여, 250MHz, 1GHz, 5GHz와 10GHz의 경우에 대한 2 km 거리에서의 자유 공간 손실을 예측해 보았다.

Free-space loss at various frequencies at a distance of 2 km
2 km 거리에서 250MHz와 10GHz의 손실 차이가 32dB 정도 발생한다. 즉 10GHz를 사용하기 위해서는 250MHz 대비 32dB의 보상을 하기 위해서 출력을 높이거나, Antenna 이득을 높이거나, 모뎀의 특성을 강화하는 방법 등을 사용하여야 한다. 3단계에서는 1∼2단계까지의 과정을 거쳐 도출된 M-S2X 목적의 후보 주파수에 대해 실제 미할당 여부 판단을 위한 검증과정을 진행하여 후보 주파수 대역을 선정하는 절차로 진행하였고, 이에 대한 자료를 수집하였다.
4.3 후보 주파수군 선정
앞서서 과학기술정보통신부에서 정하고 있는 주파수 분배표를 활용하여 235MHz에서 10GHz 주파수 범위 내에서 개별 주파수 대역에 대해 나열을 하고 M-S2X 서비스 구현을 위해 M-S2X 최소 요구사항인 전송속도 3Mbps 이상을 고려하여 이용 가능할 것으로 예측되는 후보 주파수와 최소 전송거리인 2 km 이상을 만족하는 총 7개의 개별 후보 주파수 대역을 선별하였다. Table 7은 7개 후보 주파수 대역에 대한 주파수 범위 및 주요 핵심 내용에 대해 나타내고 있다.

List of candidate frequency bands for M-S2X
470∼698 MHz 대역은 공동사용 대역에 해당되며(방송면허, TVWS 비면허), TVWS(TV White Space) 이용 시, DB 접속을 통해 이용 위치에서 사용 가능한 가용채널 이용이 필요하다. 2,400∼2,450 MHz와 2,450∼2,483.5 MHz 대역은 WiFi 대역으로 해상에서 전송 거리를 만족하는지 여부에 대해 검토가 필요하다. 또한 경우에 따라서 향후 전송출력을 높이는 방안이 필요할 수 있다. 5,850∼5,925 MHz 대역은 도로 교통 C-ITS의 WAVE 대역으로 단일 기지국 기준 1km 이하 전송거리를 가지고 있다. 다만 해상에서는 수 km의 전송 거리를 가질 것으로 예상된다. 1,885∼1,920 MHz와 2,010∼2,025 MHz 대역은 면허 대역으로 추후 이동통신 용도로 사용될 가능성은 있으나 높지 않을 것으로 예상된다. 2,300∼2,400 MHz 대역은 실질적으로 미사용 대역에 해당되나, 추후 이동통신 용도로 사용될 가능성이 높다고 할 수 있다. 2,535∼2,655 MHz 대역은 현재 미할당 대역에 해당되며 Wibro 대역에 해당된다. 4,500∼4,800 MHz 대역에서는 해상 영역을 일종의 로컬 지역 개념으로 지정하기에는 모호한 측면이 있으므로 해상 사용 가능 여부를 검토할 필요가 있다. 참고로 5G 특화망 대역은 4,720∼4,820 MHz이다.
4.4 M-S2X 통신 주파수 최종 선정
앞서 선별된 7개의 후보 주파수 대역에 대해 우선순위를 도출하기 위한 Delphi survey 과정을 거쳤다. Survey를 위한 전문가들은 M-S2X 후보 주파수 적정성 평가를 위해 평가지표와 평가표 양식을 기준으로 평가를 하게 된다. 평가지표는 크게 ① 국내외 주파수 정책 부합성, ② 기술진화 정도, ③ M-S2X 특성 고려평가 요소로 구성하였다. ① 국내외 주파수 정책 부합성에 대한 세부 평가항목으로는 국내 주파수 분배 정책 부합성, 국제 주파수 조화 부합성로 지정하였다. ② 기술 진화 정도에 대한 세부 평가항목은 장비 도입의 용이성으로 지정하였다. 마지막으로 ③ M-S2X 특성 고려평가 요소 세부평가항목으로는 서비스 용도 적합성 여부, 주파수 확보 용이성, 주파수 이용 용이성(또는 제약사항 여부), 가용 대역폭 확보 가능성(최소 3Mbps 전송속도), 전파전달 특성 적합도(최소 2km 커버리지)로 구성하였다.
주파수 분야 전문가로 구성된 전문가위원회 참여 전문가들을 통한 후보 주파수 우선순위 결정 결과는 Table 8과 같다. 주파수 우선순위를 위한 설문은 전문가가 Table 4에서 선정된 평가 영역에 대한 구조화된 설문지를 통해 각 세부 문항에 대한 5점 리커트(Likert)척도(5=매우 적절함, 4=적절함, 3=보통, 2=적절하지 않음, 1=매우 적절하지 않음)를 제시하여 점수를 표시할 수 있도록 하였다.

The results of priority determination for candidate frequency
M-S2X 이용 후보 주파수 평가 순위 결과에서 알 수 있듯이 도입에 있어 가장 우선순위가 높은 주파수 대역은 기존 WiFi 대역에 해당하는 2,400∼2,450MHz 및 2,450∼2,483.5MHz 대역에 해당함을 확인할 수 있다. 또한 2순위 평가 순위 주파수 대역은 TVWS에 해당하는 470∼698MHz 대역이 선정되었음을 확인할 수 있다. 본 후보 주파수 선정 결과에서 알 수 있듯이 전문가위원회 도출 결과가 M-S2X 서비스 최소 요구사항인 2km 이상의 전송거리 및 3Mbps 이상의 전송속도 만족 여부를 최우선적으로 고려하여 도출되었음을 예측할 수 있다. 또한 기존 사용 가능 무선기기의 원활한 도입 가능 여부, 비용 소모 및 유지비 정도 등에 해당하는 경제성 여부, 글로벌 주파수 조화 등을 종합적으로 고려했을 때, 평가점수에서도 파악할 수 있듯이 2.4GHz WiFi 대역과 TVWS 대역이 타 후보 주파수 대역 대비 이용에 있어 더욱 효율적으로 이용이 가능성을 예상할 수 있다.
5. 결 론
해상교통에서 선박의 자율운항을 구현하기 위해서는 첨단 운항자 지원 시스템, 그리고 선박과 선박, 선박과 육상을 연결할 수 있는 통신시스템이 반드시 필요하다. 기존의 통신은 서비스 트래픽이 포화 상태이거나 자율운항선박 서비스 구현을 위한 요구 기능에 부합하지 못하므로 본 연구에서는 추가적인 통신 기술의 선제적 도입을 제시하였다.
이를 위해 본 연구에서는 자율운항선박에 적용할 통신 주파수를 탐색하는 사전 단계로 해상교통과 도로교통에서 사용 중인 통신 주파수와 기술을 분석하여 제시하였다. 적정 통신 주파수를 선정하기 위해서는 자율운항선박에 구현될 서비스와 그에 맞는 통신 요구 기능을 분석하여 후보 주파수군을 도출하는 것이 필요하다. 본 연구에서는 선박 중심 네트워크인 S2X 통신기술에 대한 개념을 재정랍하고 S2X 통신의 요구 기능을 제시하였다. 그리고 과학기술정보통신부에서 정하고 있는 주파수 분배표를 활용하여 활용 가능한 주파수를 먼저 나열하고 도출된 요구 기능에 적합한 후보 주파수 군을 도출하였다. 이 과정을 통해 M-S2X 서비스 구현을 위해 M-S2X 최소 요구사항인 전송속도 3Mbps 이상을 고려하여 이용 가능할 것으로 예측되는 후보 주파수와 최소 전송거리인 2 km 이상을 만족하는 총 7개의 개별 후보 주파수 대역을 선별하였다. 선별된 7개의 후보 주파수 대역에 대해 우선 순위를 도출하기 위해 ① 국내외 주파수 정책 부합성, ② 기술진화 정도, ③ M-S2X 특성 고려평가 요소 등의 평가지표를 바탕으로 Delphi survey 과정을 거쳤다. 이를 통해 최종적으로 가장 우선순위가 높은 주파수 대역은 기존 WiFi 대역에 해당하는 2,400∼2,450MHz 및 2,450∼2,483.5MHz 대역에 해당함을 확인할 수 있었고 2순위 평가 순위 주파수 대역은 TVWS에 해당하는 470∼698MHz 대역이 선정되었음을 확인할 수 있었다.
본 연구를 통해 도출된 주파수는 향후 자율운항선박 서비스 구현을 위해 활용이 가능할 것으로 기대된다. 다만, 해당 주파수가 해상통신으로 적합한지 여부에 대해 검증이 필요하고 해상에서 이용 가능하도록 개량이 필요하다는 점은 연구의 한계점이라고 볼 수 있다.
향후 해당 주파수가 해상에서 적합한지 여부에 대해 실험을 통해 검증하고 자율운항선박에 적용이 가능한 각종 서비스를 도출한 후 시범 적용하는 연구의 수행이 필요할 것이다.
Acknowledgements
본 논문은 해양수산부 해양수산과학기술진흥원의 지원을 받아 수행하는 “초고속해상무선통신망 무선설비 다각화 및 통신연계 기술개발 연구”(RS20210644)의 일부 내용임을 밝힙니다.