자율운항선박의 회피 항로 적용을 위한 항로 추종 알고리즘 개발
Development of Route following Algorithm for Application in Collision Avoidance Routes of Maritime Autonomous Surface Ship
Article information
Abstract
최근 자율 항해 기술의 수요가 높아져 관련 연구도 증가하는 추세이다. 자율운항선박들은 일반적으로 계획 항로를 추종하여 항해하는 도중 위험 상황에 따라 회피항로를 산출하고 산출된 항로를 추종한다. 항로 추종에는 일반적으로 자동조타장치가 활용되며, 자동조타장치의 운용 방식 중, 항로제어 모드를 자율운항선박에 적용하는 것이 현 시점에서 가장 적절한 방안이다. 따라서 본 논문에서는 자동조타장치의 항해제어 모드를 활용해 회피 항로를 적용하기 위한 항로 추종 알고리즘을 개발한다. 알고리즘은 직선구간과 선회구간을 구분하여 개발하 였으며, 이에 대한 성능을 검증하기 위해 국제 인증을 취득한 시뮬레이터 장비를 사용하여 관련 국제 표준인 IEC 62065에서 제시한 성능을 만족하기 위한 성능 시험을 진행하였다. 성능 검증 결과로 보았을 때, 선박이 항로를 추종함에 있어서 선박과 항로 사이의 직선거리를 나타내는 Cross Track Error가 IEC 62065에서 제시하는 성능 기준을 만족하는 것을 확인하였다.
Trans Abstract
Recently, the demand for autonomous navigation technology has increased, and related research is also increasing. Autonomous ships generally follow the planned route, calculate the avoidance route according to the risk situation while sailing, and follow a calculated route. In general, an automatic steering device is used to follow the route, and among the operational automatic steering device methods, the route control mode is the most appropriate method to apply to autonomous ships. Therefore, in this study, we developed a route-tracking algorithm to apply an avoidance route using the navigation control mode of an automatic steering device. The algorithm was developed by dividing the straight and turning sections. A performance test was conducted to satisfy the performance suggested by IEC 62065, the relevant international standard, using simulator equipment that had acquired international certification to verify its performance. The results of the performance verification confirmed that the cross-track error, which represents the straight distance between the ship and the route, satisfied the performance standards suggested by IEC 62065 when the ship followed the route.
1. 서 론
최근 자율 항해 기술의 수요가 증가하면서 관련 연구 또한 증가하는 추세이다. 이에 따라 항해사 의사결정 지원 등을 위한 안전 지원 IT 서비스 연구가 활발히 진행되고 있다(Woo, 2019). 또한, 해운산업 분야에서는 제4차 산업혁명의 일환으로 자율운항선박에 대한 관심이 증가하고 있으며, 이에 따라 국제사회에서의 논의도 본격화되고 있다(Choi and Jun, 2022).
2018년 제99차 국제해사기구 해사안전위원회에서 자율운항선박을 정의하고 자율화의 단계를 구분하였으며, 자율운항선박 관련 규정 개정을 위한 규정 식별 작업을 시작하였다(IMO, 2018). 그리고 2021년 제103차 해사안전위원회에서 규정식별 작업을 완료하여 자율운항선박 관련 규정을 정립할 준비를 마쳤다(IMO, 2021).
또한, 2023년 해사안전위원회에서 개최한 “Making Headway on the IMO MASS Code” 심포지엄에서 자율운항선박의 최신 기술 개발, 상용화 방안, 항구의 적응 방안에 대한 논의가 진행되었다. 해당 심포지엄을 통해 해사안전위원회는 해상에서의 생명 안전 및 선상 화물과 자율운항선박 자체의 안전을 보장하는 MASS Code를 2025년 발효 예정이라고 발표하였다. 또한, 해당 심포지엄에서 한국의 한국선박해양공학연구원은 지능형 항법 시스템의 개발 및 테스트에 대한 작업을 소개하였으며, 국내 기업(삼성중공업, HD현대 등)이 시험 중인 시스템에 대한 시뮬레이션 시연을 보였다(IMO, 2023).
이와 같이 국내외 자율운항선박에 대한 연구가 활발히 진행되고 있으며, 이러한 자율운항선박들은 일반적으로 선박이 기존 계획항로를 추종하여 항해하는 도중 조우하는 위험에 대해 최적 회피항로를 산출하고, 선박이 산출된 회피항로를 자동으로 추종하는 것을 목표로 한다. 따라서 자율운항선박에 있어 항로를 자동으로 추종하는 것은 기본적으로 갖추어야 할 필수사항으로 볼 수 있다.
항로추종을 위한 선박의 조종에는 일반적으로 자동조타장치가 활용되며, 자동조타장치는 사용자의 운용 방식에 따라 수동제어/선수방위제어/항로제어 모드를 제공한다. 그 중에서 사용자로부터 항로를 입력받아 선박을 자동으로 제어하는 항로제어 모드를 활용하여 자율운항선박의 항로추종을 구현하는 것이 현 시점에서 가장 적절한 방안이다.
하지만 현재 항로제어모드를 보유한 국산 자동조타장치가 없어, 국내 자율운한선박 연구에 외산 장비가 활용되고 있는 실정이다. 외산 장비의 특성 상, 기술적 지원에 어려움이 존재하므로 국내 자율운항선박에 대한 연구를 활성하기 위해서는 항로제어모드를 포함한 국산장비 개발에 대한 연구가 국내에서 선행되어져야 할 필요가 있다.
따라서 본 논문에서는 자율운항선박에 적용하기 위한 국산 장비 개발에 앞서 항로제어 모드를 활용한 항로 추종 알고리즘을 개발하는 것과 이에 대한 국제 표준인 IEC 62065에서 제시한 성능을 만족하는지에 대한 검증을 목적으로 한다.
2. Track Control System
자동조타장치의 항로제어 모드에 해당하는 TCS(Track Control System)는 바람, 편류 등 외력의 영향을 조종 장치에서 보정하고 목적지점까지의 방위뿐만 아니라, 항로에서 떨어진 거리를 고려하여 미리 설정된 항로를 따르도록 선박의 움직임을 제어하는 시스템을 의미한다.(IEC, 2014)
본 논문에서는 Track Control System을 사용하여 항로 추종 알고리즘을 구현하였다.
2.1 TCS의 종류
TCS는 기존 분리 운영되었던 전자해도표시시스템(ECDIS)과 선수방위제어시스템을 통합함으로서, 선수방위 제어뿐만 아니라 항로 계획에 따라 자동적인 항적 제어를 한다. TCS는 항해사 개입 없이 목적 경유지를 제어하는 핵심 시스템으로서(IEC, 2014), 본 논문에서 제안하는 항로 추종 알고리즘을 구현하기 위해 적용하였다.
TCS는 기능 요구사항에 따라 Table 1과 같이 Category A~C로 나뉘어진다. 여기서 Category A는 단순히 Leg만 따라가는 역할을 하며, Turn의 구현은 되지 않는다. Category B는 Leg만 따라가는 역할을 하지만 외부의 입력을 통해 Turn의 구현이 가능하다. Category C는 별도의 설정이나 입력 없이 모든 구간에 걸쳐 Leg와 Turn의 구현이 가능하다.

TCS category
본 논문에서는 자율운항선박의 필수 기능인 항로 추종 알고리즘을 개발하는 것이 목적이기 때문에 3가지 종류 중 Category C에 부합하는 알고리즘 개발을 목표로 한다(IEC, 2014).

3. 항로 추종 알고리즘
ECDIS의 항해 정보와 Autopilot의 조타 정보간의 연계를 통해 선박의 항로 추종 알고리즘을 구현한다. 항로 추종 알고리즘은 크게 직선 구간과 선회 구간 두 가지 상황으로 구분되어 계산을 수행하게 된다. 직선 구간에서는 선박이 계획 항로와 더욱 가깝게 항해하기 위해 선박의 선수방위를 계산하여 항로 추종을 수행하고, 선회 구간에서는 최적의 선회율을 계산하여 항로 추종을 수행하게 된다.
3.1 공통 사항
선박의 항로 추종 시 발생할 수 있는 모든 상황에 대해 공통적으로 아래 사항을 고려한다.
3.1.1 계산 주기
선박이 항로를 추종하기 위해 선수방위와 ROT 값을 계산함에 있어, 일정 주기로 계산하고자 한다.
계산 간격이 너무 짧으면 불필요한 Rudder 조작이 발생하게 되고, 이는 선박의 운항에 대한 경제적인 손실로 이어지게 된다.
반대로 계산 간격이 너무 길면 선박이 항로 추종을 할 수 없게 된다. 이에 본 논문에서는 선박이 일정 거리를 이동할 때마다 계산하고자 하며, 이 계산 주기는 다음과 같이 계산할 수 있다.
여기서,
T : Calculation Time
a : 이동 거리 상수
V : Vessel Speed Over Ground (Knot)
선박의 속도를 V라고 하고 선박이 일정 거리를 이동할 때 걸리는 시간을 계산 주기라고 하였을 때, 계산 주기는 식(1)과 같다. 이때, 이동 거리는 선박 모델별 상이한 값을 사용한다.
3.2 On the leg
직선 구간에서는 선박의 선수방위 명령을 제어함으로서 항로 추종을 구현한다. 자동조타장치의 HCS(Heading Control System)은 설정된 선수방위를 유지하기 위해 타를 조작하기 때문에 직선 구간에서는 선수방위 명령을 제어한다(ISO, 2019). 선박이 항로를 추종을 위해서는 현재 선박의 선수방위와 실제 침로 방위와의 차이를 구해야한다. 결과적으로 선박이 계획된 항로에서 멀리 떨어져 있는 경우, 선박이 항로선에 더욱 가깝게 다가갈 수 있도록 적절한 선수방위가 계산되어야 한다.
3.2.1 좌표계
해당 연구의 직선 구간에서의 항로 추종을 위해 좌표계를 Fig.1과 같이 정의한다. 해당 좌표계는 X-Y 평면 좌표계로서 선박의 선수방위를 측정하는 기준인 진북과 X축이 일치하며 계획 항로에 가까이 다가가기 위한 선수방위를 계산하는 목적으로 사용된다. ψ는 선수방위, θ는 실제 침로 방위, γ는 계획 항로의 방위, d는 선박과 항로 사이의 거리, V는 선박의 속력, Δh는 선박이 t-1 시간에서에서 t 시간까지의 이동 거리를 의미한다.

Coordinate system
3.2.2 실제 침로 방위
일정 거리 간격으로 선박의 위치를 확인하여 실제 선박이 이동하는 방위를 아래와 같이 계산한다.
여기서,
T : 식(1)의 결과 값인 Calculation Time
식(2)를 통해 산출된 선박의 이동거리와 선박과 계획 항로 사이의 거리를 통해 선박의 실제 침로 방위를 식(3)과 같이 구할 수 있다.
3.2.3 목표 침로 방위
직선 구간에서 선박이 항로를 추종하기 위해서는 가야할 목표 침로를 계산해야 한다. 목표 침로는 선박과 계획 항로 사이의 거리가 줄어들도록 아래와 같이 계산한다.
여기서,
C = 목표 침로
b = 상수

Target course concept
목표 침로의 방위는 계획 항로의 방위와 선박과 계획 항로 사이의 거리를 사용하여 식(4)와 같이 계산한다. 또한, 식(4)의 최대 거리는 IEC 62065에서 정의한 선박 모델별로 상이한 값을 가지며, 선박이 항로와의 거리가 벌어질수록 목표 침로의 변화가 커야하기 때문에 선박 모델별로 상수 b를 다르게 설정하여 계산하게 된다.
3.2.4 선수방위 설정
직선 구간에서의 항로 추종은 최종적으로 선수방위를 제어하기 때문에 자동조타장치에서 제어할 선수방위를 아래와 같이 계산한다.
식(3)에서 구한 실제 침로 방위와 현재의 선수방위의 차이를 통해 식(5)와 같이 침로의 오차를 구할 수 있다. 최종 선수 방위 설정 값은 식(4)에서 구한 목표 침로의 방위에 식(5)에서 구한 오차를 보정하여 식(6)과 같이 계산할 수 있다.
3.3 On the Turn
자동조타장치의 HCS는 선회 구간에서 설정된 방위로 선회할 때 최대 선회 반경 및 선회율을 통해 선회를 수행한다(ISO, 2019). 선박의 위치를 기준으로 항로를 추종하기 위한 최적의 선회율을 계산해야 한다. 이때, 선수방위는 계획 항로의 다음 침로의 방위와 항상 동일하게 설정하고, 선박과 회전선 사이의 위치 관계에 따라 선회율을 계산한다.
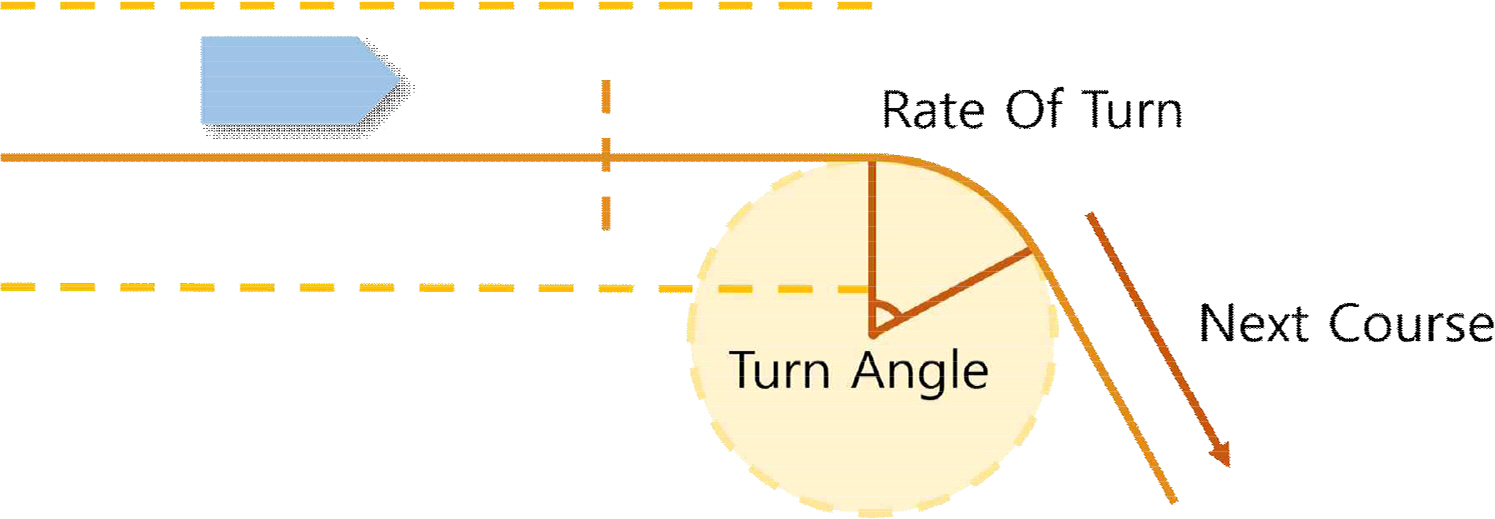
On the turn concept
3.3.1 선회권 반지름
선박의 현재 위치와 선수방위를 기준으로 다음 직선 구간에 진입할 수 있는 적절한 선회권이 생성된다.
Fig. 4에서처럼 선박의 선회가 빠를 경우, 선회권의 반지름이 커지게 되고 느릴 경우, 반지름이 작아지게 된다. 선회 구간에서의 항로 추종을 위해 선박의 위치와 선수방위에 따라 새로운 선회권의 반지름을 계산해야 하며, 선회권의 반지름을 아래와 같이 계산한다.
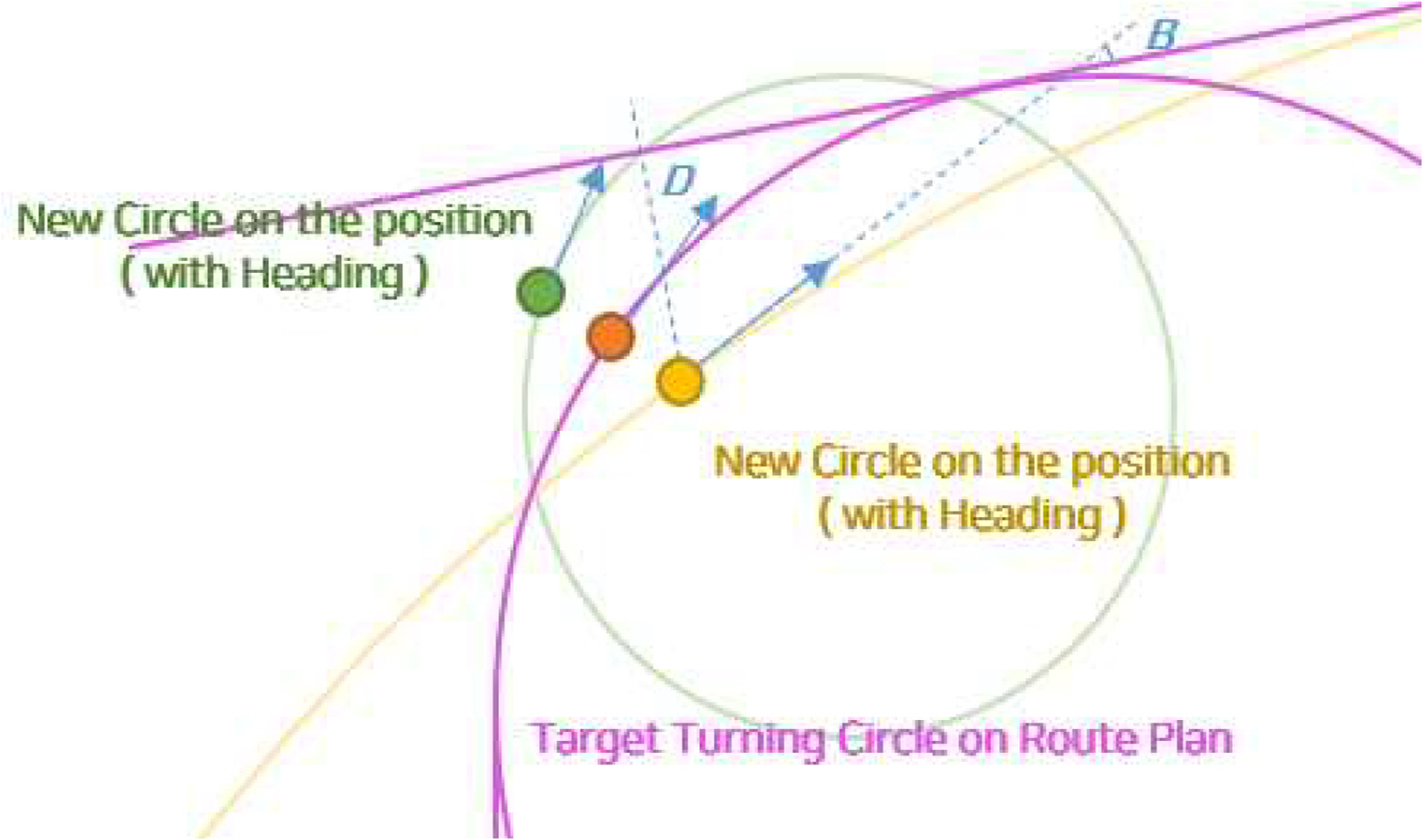
Calculate ROT concept
여기서,
B = 방위 차이
D = 다음 직선 구간까지의 거리
항로 추종을 위한 적절한 선회권 반지름을 계산하기 위해 현재 선수방위와 다음 계획 항로와의 방위 차이를 식(7)과 같이 계산하고, 현재 선박으로부터 다음 계획 항로까지의 거리를 식(8)과 같이 계산한 값을 통해 선회권의 반지름을 식(9)와 같이 계산한다.
3.3.2 선회율
3.3.1에서 생성된 선회권을 기준으로 현재 속도에 따라 선회율 값을 아래와 같이 계산한다.
여기서,
ROT = 신규 선회율
ROTp = 항로 계획 상 선회율
식(9)에서 계산된 선회권 반지름을 통해 계산된 선회율은 식(10)과 같고, 식(11)을 통해 항로 계획 상 선회율과의 차이를 계산하여 효율적인 선회를 위해 항로 계획 상 선회율에 보정하여 식(12)와 같이 새로운 선회율 값을 계산한다.
4. 성능 검증
자율운항선박의 회피 항로 적용을 위한 방안으로서, 3장에서 항로 추종 알고리즘을 개발하였고, 이에 대한 성능 검증을 위해 IEC 62065의 시험 시나리오에서 정의한 항로에 따라 각 선박 모델별로, 성능 검증을 진행하였다. IEC 62065에서는 총 3개의 선박 모델을 제시하고 있으며, 각각 Ship A(Ferry), B(Container), C(Tanker)이다.
4.1 시험 환경
시험을 위해 Table3의 장비를 사용하여 성능 검증을 진행한다. 시험에서 사용된 시뮬레이터는 조선기자재 장비의 성능을 검증하기 위한 장비로서, IEC 62065의 Track Control Model 기준과 ISO 11674 및 16329의 성능을 만족(Dynautics, 2018)하는 Dynautics에서 개발한 ShipSim3를 사용하여 본 논문에서 제시한 항로 추종 알고리즘의 성능 검증을 진행하였다. 또한 시험을 진행할 때의 해상 환경은 IEC 62065의 시나리오 상 정의되어 있지 않아, Sea State 1으로 설정하여 시험을 진행하였다.
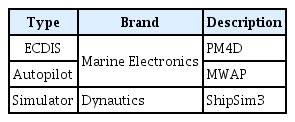
Test equipment
시뮬레이터는 ECDIS와 자동조타장치로 항해 센서 데이터를 전송하며, ECDIS는 자동조타장치로 선수방위 및 선회율 명령을 전송한다. 자동조타장치는 ECDIS로 수신 받은 선수방위 및 선회율 값을 통해 계산된 타각 제어 명령을 시뮬레이터로 전송한다.

Test equipment block diagram
성능 검증은 IEC 62065에서 지정한 선박 모델을 사용하여 진행된다. IEC 62065에서 제시한 선박 모델은 총 3가지로, 각 선박 모델의 재원은 Table4와 같다.

Ship model
4.2 선박 모델별 시험 결과
항로 추종 성능을 검증하기 위해 각 선박 모델별로 IEC 62065에서 제시한 시나리오 항로를 사용하여 시험을 진행하였다. 성능의 검증에는 IEC 61162-1에서 제시한 XTE(Cross Track Error) 데이터를 측정하여 진행하였다. XTE 데이터는 의도한 항로 라인에 수직인 위치 오차의 크기와 방향에 대한 내용으로(IEC, 2016) XTE 데이터를 통해 선박과 항로와의 오차를 식별하였으며, 그에 대한 최댓값이 IEC 62065의 성능 기준에 부합하는지를 검증하였다.
4.2.1 Ship A
Table 4에서 정의한 Ship A 선박은 Ferry 모델로, IEC 62065의 시나리오 1번 항로를 사용해 시험을 진행하였으며, 초기 선수방위 및 속력은 각각 0.0도와 25.0 노트이다.

Scenario 1
Ship A에 대하여 시험한 결과, 직선항로에서는 XTE가 0.004해리를 초과하지 않는 범위에서 항로계획을 따라 조타를 제어하는 것을 확인하였다. 또한, 곡선항로에서는 XTE가 0.017 해리를 초과하지 않는 범위에서 항로계획을 따라 선회를 완료하였으며, 전체 시험 구간에서의 XTE 평균값은 0.004072 해리로 기록되었다.
IEC 62065 표준에서는 Ship A 의 시나리오 1에 대한 성능평가 기준으로 최대 XTE 값 0.0188985 해리를 요구하였으며, 위 측정결과를 바탕으로 식(4)와 식(12)를 통해 구현한 항로 추종 알고리즘이 Ship A 모델에 대해 IEC 62065의 평가 기준에 적합한 성능을 가지는 것이 검증되었다.
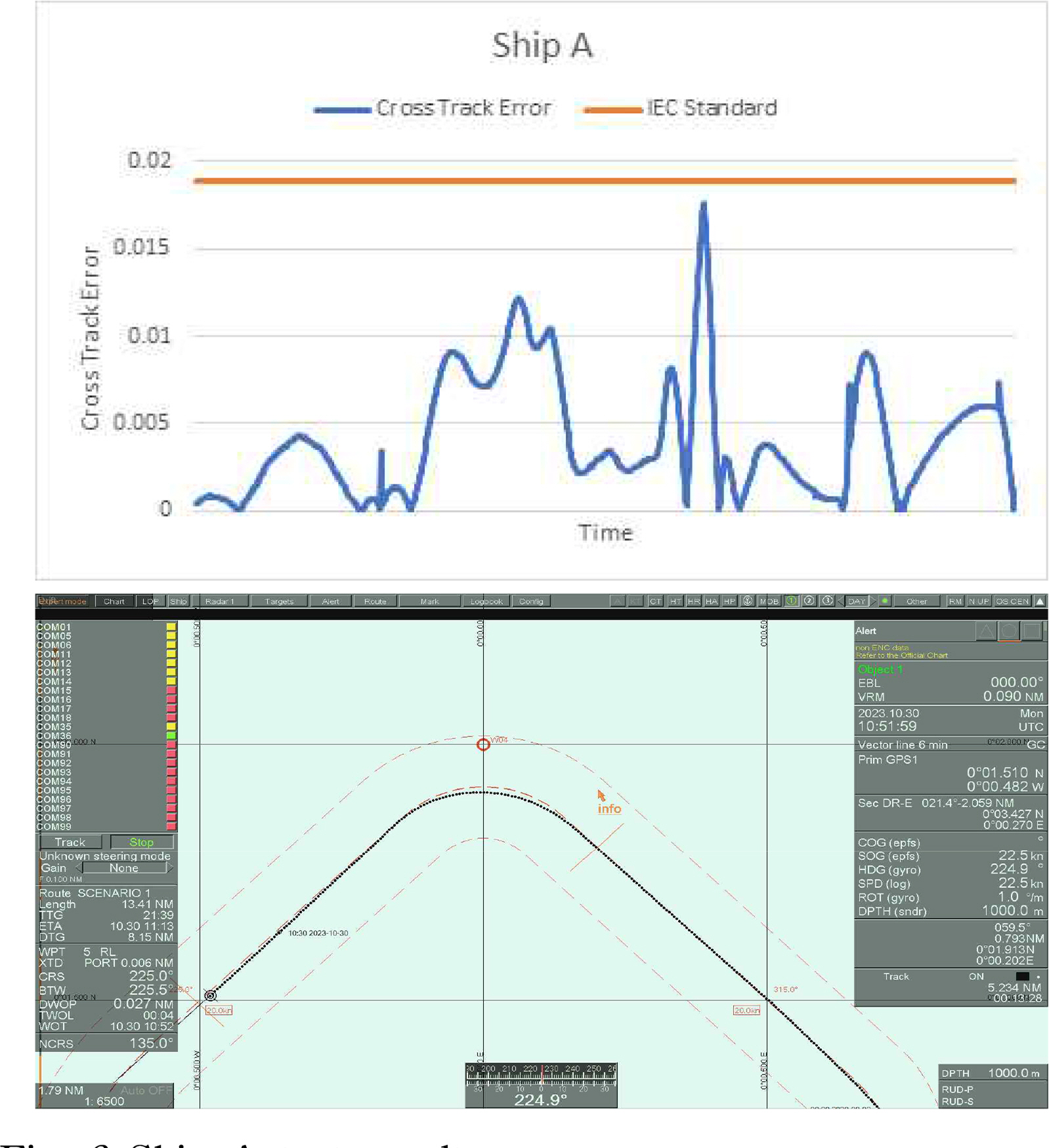
Ship A test result
4.2.2 Ship B
Table 4에서 정의한 Ship B 선박은 Container 모델로, IEC 62065의 시나리오 3번 항로를 사용해 시험을 진행하였으며, 초기 선수방위 및 속력은 각각 40.2도와 20.0 노트이다.
Scenario 3
Ship B에 대하여 시험한 결과, 직선항로에서는 XTE가 0.002해리를 초과하지 않는 범위에서 항로계획을 따라 조타를 제어하는 것을 확인하였다. 또한, 곡선항로에서는 XTE가 0.004 해리를 초과하지 않는 범위에서 항로계획을 따라 선회를 완료하였으며, 전체 시험 구간에서의 XTE 평균값은 0.003608 해리로 기록되었다.
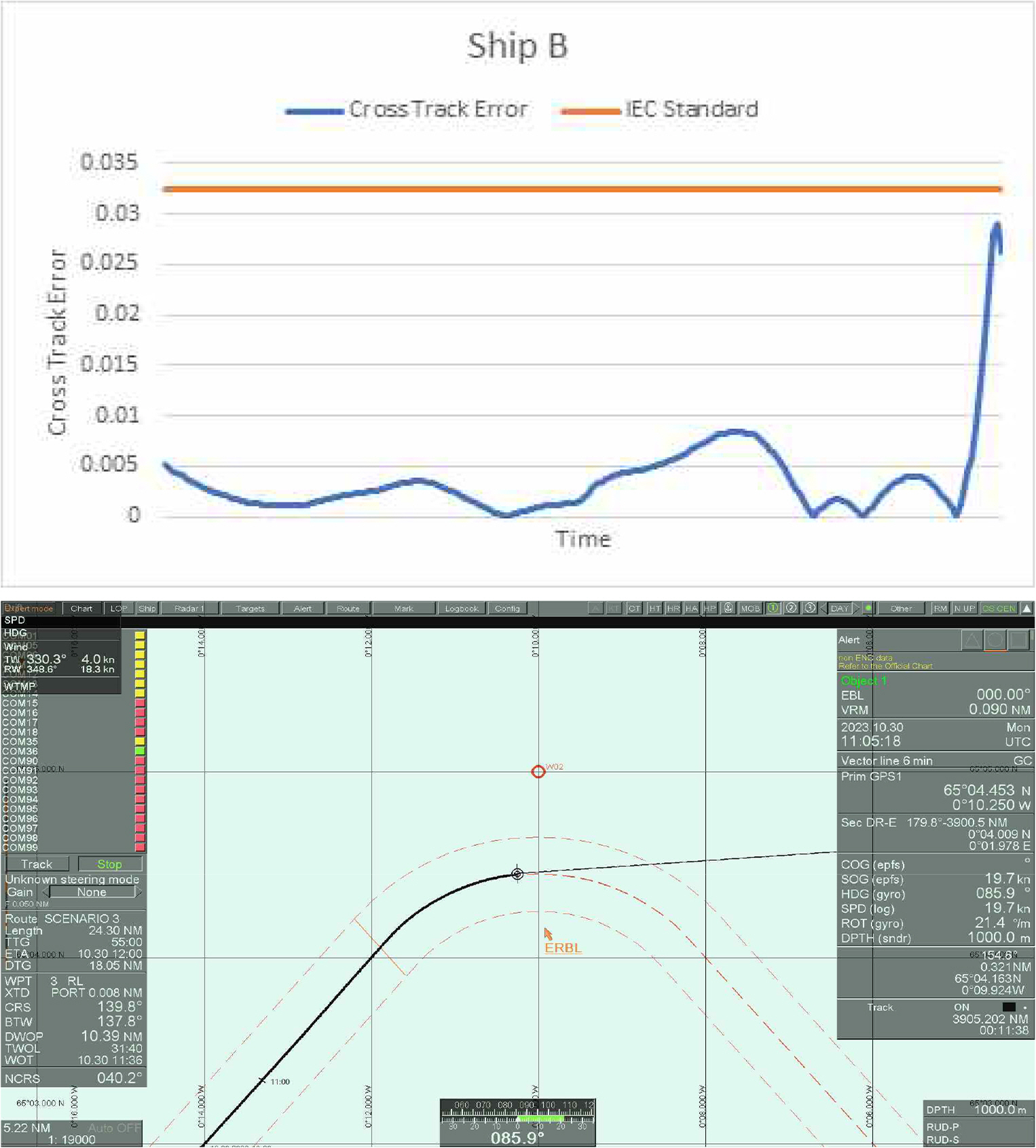
Ship B test result
IEC 62065 표준에서는 Ship B 의 시나리오 3에 대한 성능평가 기준으로 최대 XTE 값 0.032397 해리를 요구하였으며, 위 측정결과를 바탕으로 식(4)와 식(12)를 통해 구현한 항로 추종 알고리즘이 Ship B 모델에 대해 IEC 62065의 평가 기준에 적합한 성능을 가지는 것이 검증되었다.
4.2.3 Ship C
Table 4에서 정의한 Ship C 선박은 Tanker 모델로, IEC 62065의 시나리오 2번 항로를 사용해 시험을 진행하였으며, 초기 선수방위 및 속력은 각각 40.2도와 20.0 노트이다.

Scenario 2
Ship C에 대하여 시험한 결과, 직선항로에서는 XTE가 0.02 해리를 초과하지 않는 범위에서 항로계획을 따라 조타를 제어하는 것을 확인하였다. 또한, 곡선항로에서는 XTE가 0.03 해리를 초과하지 않는 범위에서 항로계획을 따라 선회를 완료하였으며, 전체 시험 구간에서의 XTE 평균값은 0.014337 해리로 기록되었다.
Ship C에 대하여 시험한 결과 시나리오 2에 대해서 제시한 최대 XTE 값 0.0539957 해리를 초과하지 않았으며, 평균 0.003608 해리로 측정되었다. 이를 통해 식(4)와 식(12)를 통해 구현한 항로 추종 알고리즘이 Ship C 모델에 대해 IEC 62065의 평가 기준에 따라 성능이 검증되었다.
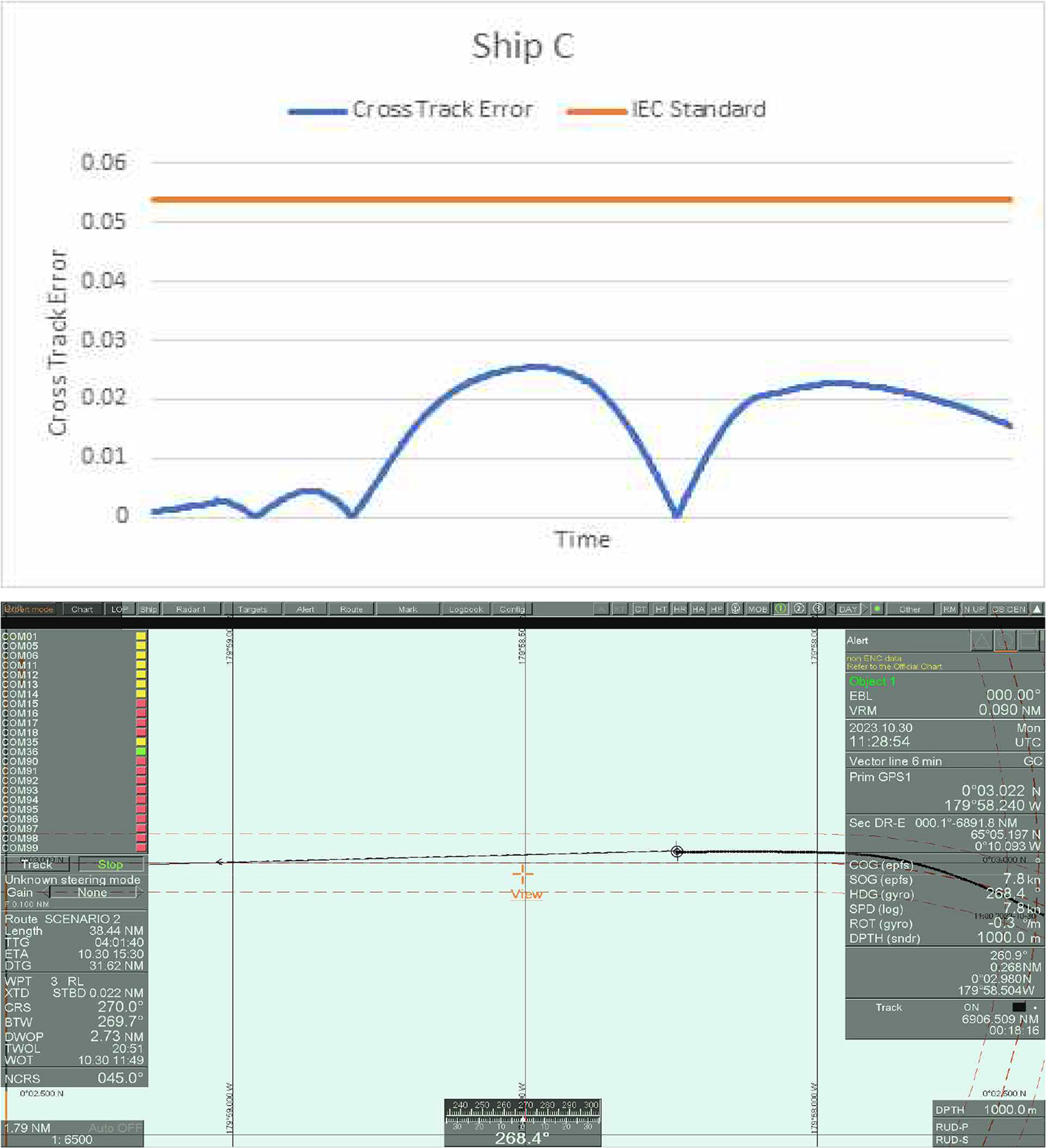
Ship C test result
IEC 62065 표준에서는 Ship C 의 시나리오 2에 대한 성능평가 기준으로 최대 XTE 값 0.053996 해리를 요구하였으며, 위 측정결과를 바탕으로 식(4)와 식(12)를 통해 구현한 항로 추종 알고리즘이 Ship C 모델에 대해 IEC 62065의 평가 기준에 적합한 성능을 가지는 것이 검증되었다.
5. 결 론
본 연구에서는 자율운항선박이 회피 항로를 추종하는데 활용되는 항로 추종 알고리즘을 개발하고, 자동조타장치의 Track Control System을 통해 알고리즘을 구현하였다. 구현된 알고리즘이 정상적으로 동작하는지 확인하기 위해 관련 국제 표준인 IEC 62065에서 제시하는 성능 기준에 따라 검증을 진행하였으며, 이에 대한 결과를 확인하였다.
2장에서는 항로추종을 위한 자동조타장치의 항해제어 모드인 Track Control System이 무엇인지 정의하였으며, 3장에서 항로 추종을 위한 알고리즘을 개발하고, 자동조타장치의 항해 제어 모드를 활용하여 개발된 알고리즘을 구현하였다.
4장에서는 자동조타장치의 항해제어 모드를 통해 구현한 알고리즘의 성능을 검증하기 위해 IEC 62065의 시나리오에서 정의한 항로 및 선박 모델을 사용하였다. 성능 검증 결과로 보았을 때, 선박이 항로를 추종함에 있어서 선박과 항로 사이의 직선거리를 나타내는 Cross Track Error가 IEC 62065에서 제시하는 성능 기준을 만족하는 것을 확인하였다.
해당 알고리즘을 통해 국내 자율운항선박의 연구 발전에 기여할 수 있을 것이라 판단된다.
향후에는 본 연구를 통해 개발된 알고리즘을 적용한 자동조타장치를 개발하는 것과 단순 추종 뿐 아니라 여러 해상 환경에서의 항로 추종 및 장애물 회피를 위한 회피 항로 생성에 대한 연구를 진행할 예정이다.
Acknowledgements
이 논문은 2023년도 해양수산부부 재원으로 해양수산과학기술진흥원의 지원을 받아 수행된 연구임 (20210623, 해양수산산업 핵심 기자재 국산화 기술개발)