선박 그룹항해시스템의 항법 알고리즘 개발
Development of Sailing Algorithm for Ship Group Navigation System
Article information
Abstract
자율운항선박 관련 기술개발이 전 세계적으로 활발히 진행되고 있다. 그러나, 통신, 사이버 보안, 긴급대처능력 등 기술적으로 해결되지 못한 문제들이 아직 많이 남아있기 때문에, 자율운항선박이 상용화되기까지는 많은 시간이 필요할 것으로 예상된다. 이 연구에서는 기술적으로 완전하지 않은 자율운항선박의 대체 방안으로 한 척의 리더 선박과 여러 척의 추종 선박을 하나의 그룹으로 묶어 항해하는 선박 그룹 항해시스템을 제안한다. 이 시스템에서는 리더 선박이 항행을 개시하면 추종 선박은 리더 선박의 항행 경로를 자율적으로 추종하며, 경로 추종을 위해 PD 제어를 적용하였다. 또한, 각 선박들은 충돌방지를 위해 안전거리를 유지하면서 일직선 형태로 항해한다. 선박 간의 안전거리 유지는 속력 제어를 통해 구현된다. 선박 그룹항해시스템의 유효성을 검증하기 위해 시뮬레이션을 수행하였다. 시뮬레이션에 사용된 선박은 관련 데이터가 공개되어 있는 KVLCC2의 L-7 모델이며, 선박조종운동에는 일본조선학회에서 제안한 MMG standard method를 사용하였다. 시뮬레이션 결과, 리더 선박은 미리 정해진 항로를 따라 항해하였으며, 추종 선박은 리더 선박의 경로를 따라 항해하였다. 세 척의 선박은 시뮬레이션 중 일직선 형태를 유지하였으며, 선박 간 안전거리를 유지하는 것으로 나타났다. 이 연구에서 제안하는 선박 그룹항해시스템은 자율운항선박의 문제점들을 해소하는 항행시스템으로 활용될 수 있을 것으로 기대된다.
Trans Abstract
Technology development related to maritime autonomous surface ships (MASS) is actively progressing around the world. However, since there are still many technically unresolved problems such as communication, cybersecurity, and emergency response capabilities, it is expected that it will take a lot of time for MASS to be commercialized. In this study, we proposed a ship group navigation system in which one leader ship and several follower ship are grouped into one group. In this system, when the leader ship begins to navigate, the follower ship autonomously follows the path of the leader ship. For path following, PD (proportional-derivative) control is applied. In addition, each ship navigates in a straight line shape while maintaining a safe distance to prevent collisions. Speed control was implemented to maintain a safe distance between ships. Simulations were performed to verify the ship group navigation system. The ship used in the simulation is the L-7 model of KVLCC2, which has related data disclosed. And the MMG (Maneuvering Modeling Group) standard method proposed by the Japan Society of Naval Architects and Ocean Engineering (JASNAOE) was used as a model of ship maneuvering motion. As a result of the simulation, the leader ship navigated along a predetermined route, and the follower ship navigated along the leader ship’s path. During the simulation, it was found that the three ships maintained a straight line shape and a safe distance between them. The ship group navigation system is expected to be used as a navigation system to solve the problems of MASS.
1. 서 론
해운산업 분야에서는 제4차 산업혁명의 일환으로 자율운항선박에 대한 관심이 증가하고 있으며, 이에 따라 국제사회에서의 논의도 본격화되고 있다. 2018년 제99차 국제해사기구(International Maritime Organization) 해사안전위원회(Maritime Safety Committee)에서 자율운항선박(Maritime Autonomous Surface Ship)을 정의하고 자율화의 단계를 구분하였으며, 자율운항선박 관련 규정 개정을 위한 규정식별작업(Regulatory scoping exercise)을 시작하였다(IMO, 2018). 그리고 2021년 제103차 해사안전위원회에서 규정식별작업을 완료하여 자율운항선박 관련 규정을 정립할 준비를 마쳤다(IMO, 2021).
자율운항선박은 고부가가치 핵심기술 산업으로 해운, 항만, 조선기자재, 부품소재 등 연관 산업의 성장이 막대할 것으로 전망된다. 세계 주요 해운선진국에서는 시장 선점을 위해 자율운항선박 관련 기술개발을 활발히 추진하고 있다. 노르웨이의 YARA International과 Kongsberg는 노르웨이 연안의 비료 운송을 선박으로 대체하기 위해 자율운항이 가능한 전기추진 컨테이너선을 개발하였다. 일본의 경우 일본박용공업회와 일본선급(ClassNK) 및 27개 기관이 참여하여 스마트 선박 개발 프로젝트를 진행하고 있다(Kim and Jang, 2019). 그러나 자율운항선박이 상용화되기 위해서는 해결해야 할 기술적인 문제들이 남아있다. 대표적으로 선박 육상간 통신보안 기술이다. 대양항해 선박의 주 통신 수단은 위성통신이며, 여기에는 전파의 간섭과 사용주파수 밴드의 제한이 있다(Jung et al., 2019). 또 다른 문제로는 사이버 공격이 있다. 현재 선박에서 사용되고 있는 AIS, GNSS, INMARSAT 등은 사이버 공격을 받기 쉬우며, 데이터 변조, 교란 등이 발생하면 이를 기반으로 작동하는 자율운항시스템에 장애가 발생한다(Yoo et al., 2022). 이외에도 화물관리, 해적으로부터의 위협 등 해결해야 할 문제들이 많으며, 대양을 항해하는 선박에게는 더 큰 피해를 가져올 수 있다.
이 연구에서는 자율운항선박의 문제점들을 해소할 수 있는 방안으로 그룹항해시스템을 제안하고자 한다. 그룹항해시스템은 한 척의 리더 선박(Leader ship)과 여러 척의 추종 선박(Follower ship)을 하나의 그룹으로 묶어 항해하는 집단항법이다. 리더 선박은 선원이 승선하고 있는 유인 선박으로 출발지에서 목적지까지 정해진 항로를 따라 항해하며, 추종 선박은 사람이 승선하지 않는 무인선박으로 리더 선박의 경로를 자율적으로 추종하며 항해한다. 즉, 리더 선박을 통해 항해 시 급변할 수 있는 해상상태에 적시 대응하고, 추종 선박들을 관리하면서 운항하는 시스템이다.
선행 연구에서는 한 척의 리더 선박과 한 척의 추종 선박으로 구성된 시스템을 구현하고, 소형 RC(Radio Control) 보트를 이용해 해상 실험을 통해 시스템을 검증하였다(Choi and Jun, 2020). 이 연구에서는 한 척의 리더 선박과 두 척의 추종 선박으로 구성된 시스템을 구성하고, 실제 선박의 축소 모형을 이용한 시뮬레이션을 통해, 실제 선박으로의 적용가능성을 검토하고자 하였다.
논문의 구성은 다음과 같다. 2장에서는 선박의 운동을 모델링하기 위한 선박 좌표계와 선박의 수학적 모델을 설명한다. 3장에서는 선박 그룹항해시스템의 개념과 선박을 제어하기 위한 제어기에 관해 설명한다. 4장에서는 시스템 검증을 위한 시뮬레이션의 결과를 기술한다. 마지막 5장에서는 결론과 함께 선박 그룹항해시스템의 개선 방안과 추후 연구 목표에 대해 언급한다.
2. 선박 조종운동 모델
2.1 좌표계
이 연구에서 사용된 좌표계는 Fig. 1과 같이 X-Y면이 정수면에 위치하고, Z축의 양의 방향이 수직 아래쪽을 가리키는 공간고정좌표계(Space-fixed coordinate system) O-XYZ와 선체 중앙부를 원점으로 하고 선박의 선수 방향을 x축, 우현 방향을 y축, 선저 방향을 z축의 양의 방향으로 하는 선체고정좌표계(Ship-fixed coordinate system)인 o-xyz좌표계이다. 여기서 ψ는 선수각, δ는 타각, β는 표류각, r은 선회각속도, u와 vm은 각각 x와 y축 속력 성분, U는 u와 vm의 합속도를 의미한다.

Coordinate system
2.2 수학적 모델
정수 중 선박의 운동은 다음과 같이 선박의 3자유도 운동인 전후동요(Surge), 좌우동요(Sway), 선수동요(Yaw)로 표현할 수 있다(Yasukawa and Yoshimura, 2015).
여기서 X, Y, Nm는 각각 전후방향 힘, 좌우방향 힘, 선수방향 모멘트를 의미한다. 일본조선학회 소속인 조종운동 수학모델 검토그룹(Maneuvering Modeling Group; MMG)에서는 선박의 3자유도 운동을 선박에 작용하는 유체력으로 각각 분리하여 고려하는 분리수학모델(Modular type model)인 MMG 모델을 제안하였다. 이 연구에서는 MMG 모델 중 Yasukawa and Yoshimura(2015)가 제안한 MMG standard method를 사용하였다. 이 기법은 식 (1), (2), (3)의 우변인 X, Y, Nm을 아래의 식과 같이 선체, 프로펠러, 타에 의한 유체력으로 표현한다.
H, R, P는 각각 선체, 타, 프로펠러를 의미하며, 각각의 유체력은 유체력 미계수들로 구성된 식으로 표현된다(Yasukawa and Yoshimura, 2015).
3. 선박 그룹항해시스템
3.1 개념
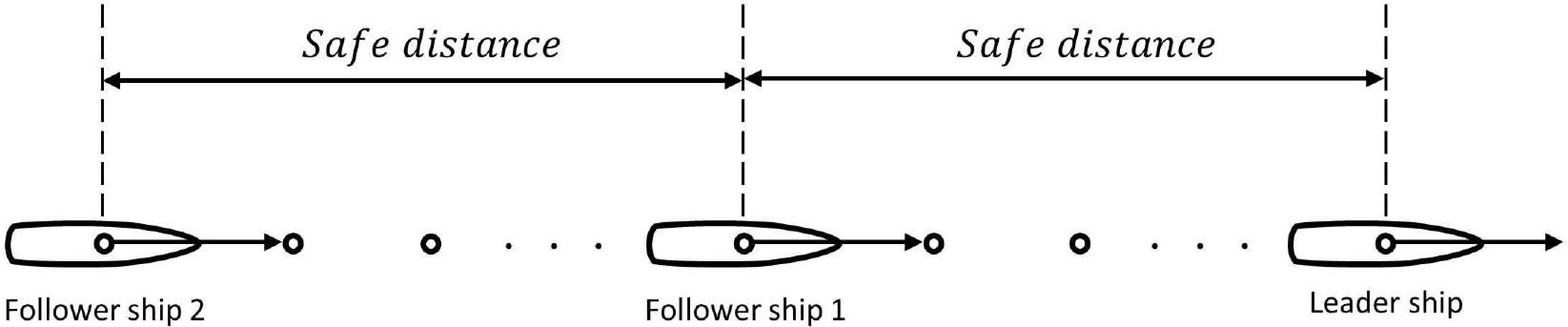
이 연구에서 구현하는 선박 그룹항해시스템에서는, 세 척의 선박이 Fig. 2와 같이 일직선 형태를 유지하면서 항해한다.
Ship group navigation system
세 척의 선박이 충돌하지 않고 항해하기 위해서 선박 간의 안전거리(Safe distance)를 설정하는 것이 필요하다. 선박 간 안전거리는 선박의 충돌방지연구에서 많이 사용되고 있는 선박안전영역(Ship safety domain) 개념을 도입하였다. 추월(Overtaking), 마주보는 상태(Head-on) 및 횡단(Crossing) 상황에서의 선박간의 안전영역을 타원형태로 정의한 Coldwell(1983)과 Szlapczynski(2017)의 연구결과를 기반으로, 선박 길이(L)의 12.2배로 하였다.
다음은 추종 선박이 리더 선박을 추종하는 방법을 기술한다. 추종 선박이 리더 선박을 추종하는 방법은 크게 두 가지로 생각할 수 있다. 첫 번째는 추종 선박이 리더 선박의 현재 위치를 추종하는 것이고, 두 번째는 추종 선박이 리더 선박의 경로를 추종하는 것이다. 두 방법의 결정적인 차이는 리더 선박이 변침할 때 나타난다. 첫 번째 방법의 경우, 추종 선박이 리더 선박을 향해 항해하기 때문에, 미리 설정된 항로에서 벗어나 항해하는 반면, 두 번째 방법에서는 추종 선박이 리더 선박의 경로를 그대로 따라 항해하기 때문에 미리 설정된 항로에서 벗어나지 않고 항해하게 된다. Fig. 3은 리더 선박이 변침할 때, 두 추종 방법의 차이를 나타낸다. 이 연구에서는 세 척의 선박이 같은 경로로 항해하도록 하고자 추종 선박이 리더 선박의 경로를 추종하는 두 번째 방법을 사용하였다.

Comparison of following methods
리더 선박이 목적지를 향해 항해를 시작하면 추종 선박은 리더 선박의 위치를 매초 수신하여 저장하며, 이는 추종점이된다. 추종 선박은 처음 저장된 추종점, 즉, 추종 선박에서 가장 가까운 추종점을 향해 항해하며, 그 추종점까지의 방위를 산출하면 추종 선박의 목표 침로가 된다.
3.2 경로추종제어
(1) 조타제어
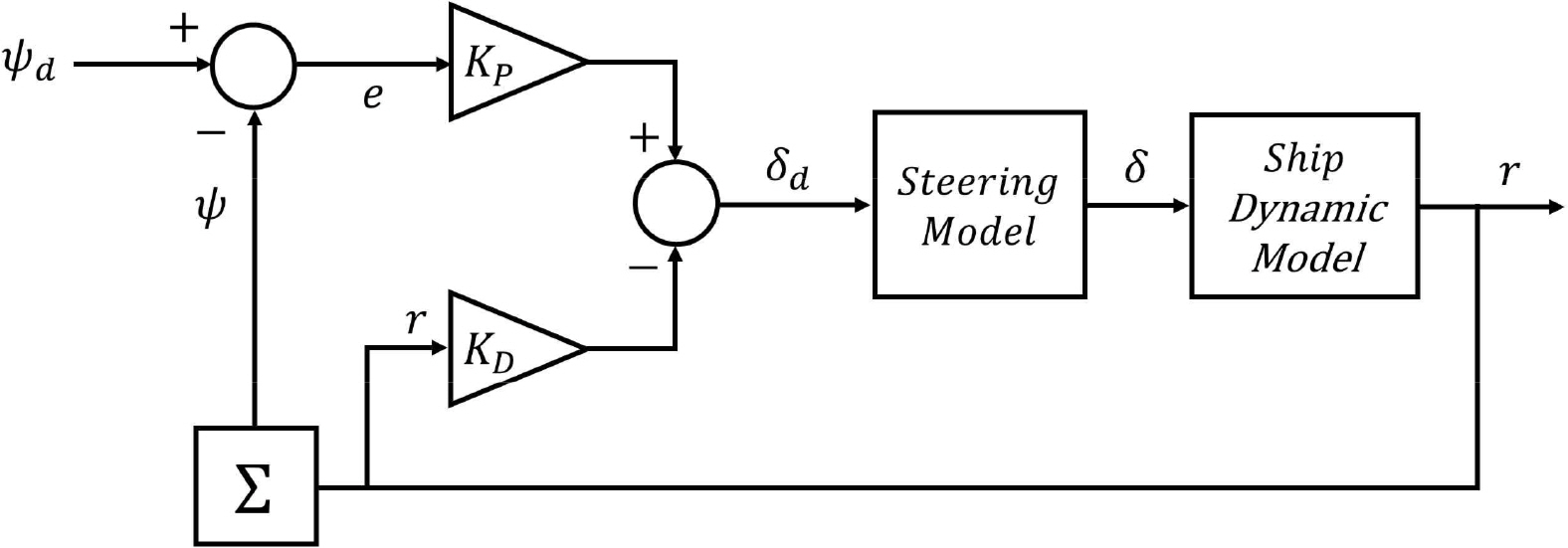
경로 추종을 위한 조타제어에 대해 기술한다. 일반적으로 선박 자동조타기에는 PID(Proportional-integral-derivative)제어 또는 적응(Adaptive)제어를 적용한다. 이 연구에서는 향후 진행할 2미터 이내의 소형선박을 이용한 해상 실선시험을 감안하여 시뮬레이션에 PD제어를 적용하였다. Fig. 4에 PD제어의 블록선도를 나타낸다.
Block diagram of PD control
여기서 KP는 비례 이득(Proportional gain), KD는 미분 이득(Derivative gain), Σ는 누산기(Accumulator)를 의미하며, ψd는 선박의 목표 침로, ψ는 선박의 현재 침로, e는 오차값으로 ψd에서 ψ를 뺀 값, r은 선박의 선회 각속도, δd는 목표 타각, δ는 선박의 실제 타각을 의미한다. PD제어를 식(7)에 나타낸다.
목표 타각(δd)은 비례동작과 미분동작의 차가 되며, 이 값이 선박의 조타기 모델에 입력되어 실제 타각(δ)이 작동하도록 한다. 이때 는 실제 선박에서와 같이 –35°에서 35°로 제한되며, 타의 최대 속도는 15.8deg/s로 제한된다. 타각이 작동하면, 선박 조종운동 모델에 의해 r이 계산된다. r은 누산기에서 누적 합산되며, 이를 통해 ψ를 얻을 수 있다.
(2) 속력제어
일반적으로 항행하는 선박은 특수한 상황을 제외하고는 속력을 변화시키는 일은 거의 없다. 또한 선박은 그 특성상속력을 정밀 제어할 필요도 없다. 따라서 이 연구에서는 추종 선박과 리더 선박 사이의 거리를 안전거리와 비교하여 선박의 rpm을 설정하는 방식으로 선박의 속력을 제어하였다.
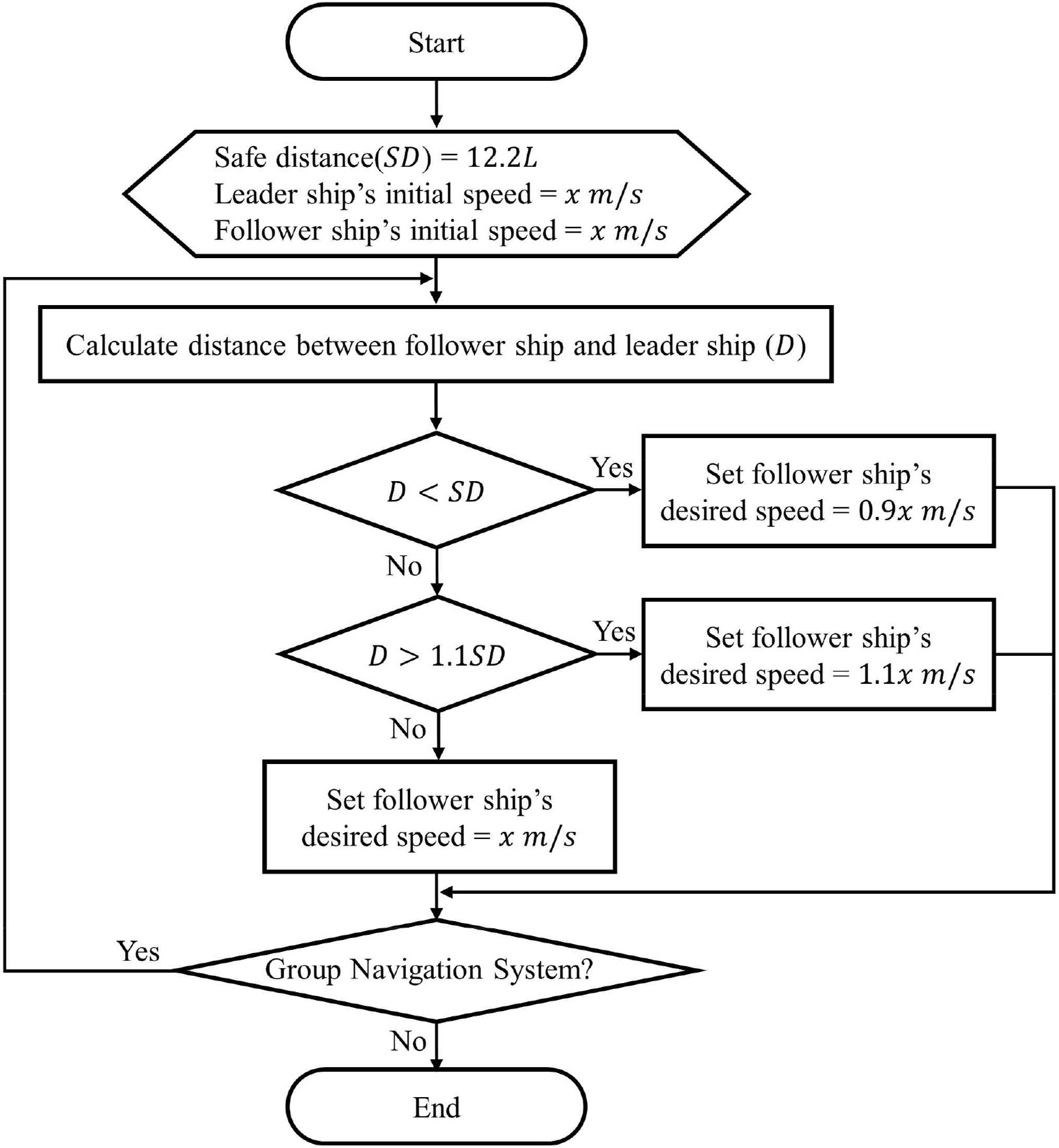
리더 선박은 정해진 변침점(Waypoint)을 따라 항해하며, 항행하는 동안 외력, 침로 변경 등의 이유로 타를 사용함으로 인해 발생하는 자연적인 감속을 제외하고는 일정한 속력을 유지하도록 하였다. 반면 추종 선박은 리더 선박과의 충돌을 방지하기 위해 일정한 범위 내에서 거리를 유지하도록 속력을 제어해야 한다. 추종 선박의 속력제어 흐름도는 Fig. 5와 같다.
Flow chart of speed control
시뮬레이션을 개시할 때 임의의 초기속력이 주어진다. 리더 선박과 2척의 추종 선박 사이의 거리가 안전거리 범위보다 작아지면, 추종 선박의 속력이 초기 속력의 90%인 값으로 설정된다. 반면 추종 선박과 리더 선박 사이의 거리가 안전거리범위보다 1.1배 이상 커지면, 초기 속력의 110%인 값으로 설정된다. 이외의 경우에는 초기 속력 값으로 항해한다. 즉, 리더 선박과 각각의 추종 선박 사이의 거리에 따라 초기속력의 90%, 100%, 110%의 값을 유지하면서 항해하게 된다. 그룹항해시스템이 진행되는 동안 이 과정은 계속해서 반복되며, 이를 통해 추종 선박과 리더 선박 사이의 거리는 일정하게 유지된다.
4. 시뮬레이션
4.1 시뮬레이션 개요
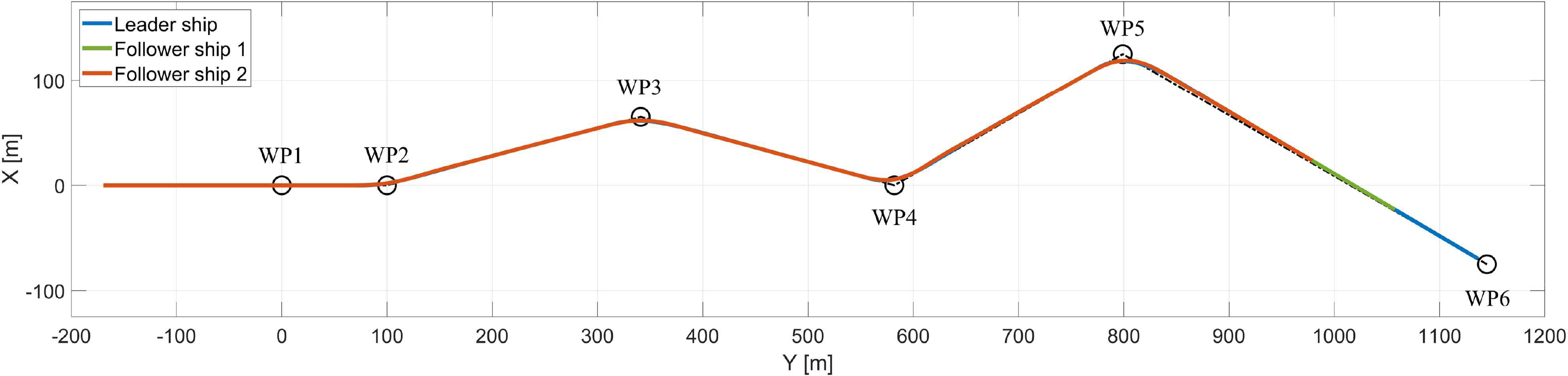
선박 그룹항해시스템을 검증하기 위해 시뮬레이션을 실시하였다. 미리 정해진 변침점에 대한 리더 선박의 추종 여부, 추종 선박의 리더 선박 경로에 대한 추종 여부, 세 척 선박의 일정한 형태 유지 여부, 선박 간 안전거리 유지 여부를 확인하고자 하였다. 시뮬레이션은 정온 상태와 외력 작용의 2종류에 대해 동일한 항행조건에서 실시하였다. 외력은 실제 선박에 작용하는 외력 크기를 감안하여(Kim et al., 2013), –3에서 3 사이의 난수(Random number)를 선박의 선수각에 포함시켰다. 시뮬레이션을 위해 설정한 변침점, 변침점간의 침로와 거리를 Table 1에 나타낸다. 변침각은 15°, 30°, 45°, 60°로 점차 커지도록 하였다.

Waypoint list for simulation
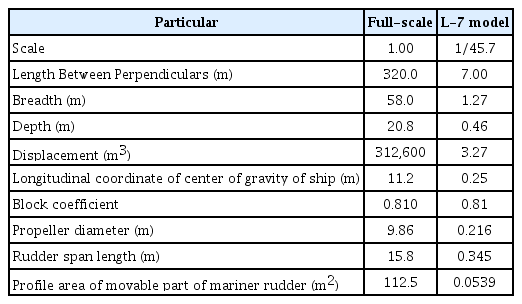
대상 선박으로는 KVLCC2의 1:45.7 축적 모형인 L-7 모델을 선정하였다. KVLCC2는 SIMMAN에서 공시 선형으로 지정되어 선박 상세 및 모형 실험을 통해 추정된 유체력 미계수 등의 데이터가 공개되어 있다. 이 때문에 선박의 조종성능, 선회성능 등을 평가하기 위한 연구에 주로 사용된다(Ko, 2022; Kim, 2019). KVLCC2 L-7 모델의 유체력 미계수 및 프로펠러와 타 관련 계수들은 Yasukawa and Yoshimura(2015)에서 추정한 수치를 사용하였다. KVLCC2 선박과 L-7 모델의 주요 제원을 Table 2에 정리하였다.
Principal particulars of a KVLCC2 tanker and it’s L-7 model
이에 따라 각 선박 간의 안전거리는 선박 길이의 12.2배인 85.4m로 설정하였다. 리더 선박의 초기 위치는 (0,0)이며, 추종 선박 1과 2의 초기 위치는 각각의 안전거리만큼 떨어진 (-85.4, 0) 및 (-170.8, 0)으로 하였다. 또한 세 척의 초기 속력을 1.18m/s, 초기 침로를 090°로 설정하고. 이에 따라 속력제어를 위한 기준속력 값을 각각 초기 속력의 90%인 1.06 m/s와 110%인 1.30m/s로 하였다.
4.2 시뮬레이션 결과
(1) 외력이 없는 경우
Fig. 6~9는 외력이 없을 때의 시뮬레이션 결과를 나타낸다.
The entire trajectory of each ship in the first simulation
The trajectory of each ship by section in the first simulation

Rudder angle(δ) and speed(U) of each ship in the first simulation
Distance between ships in the first simulation
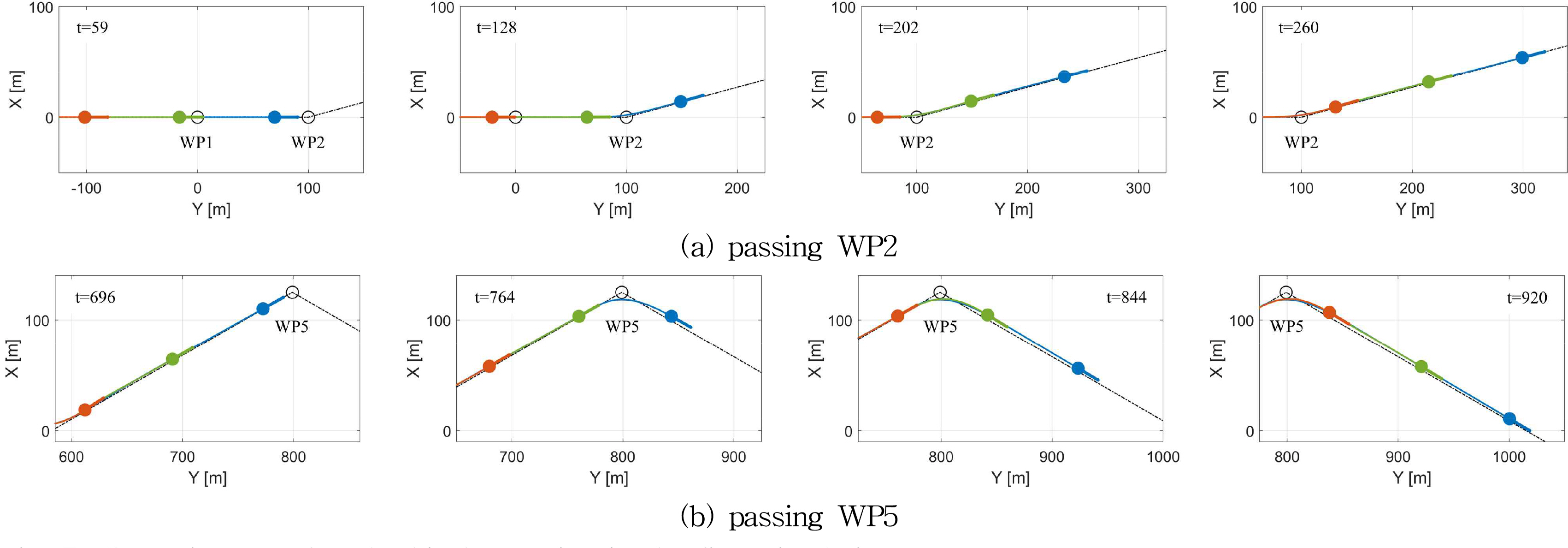
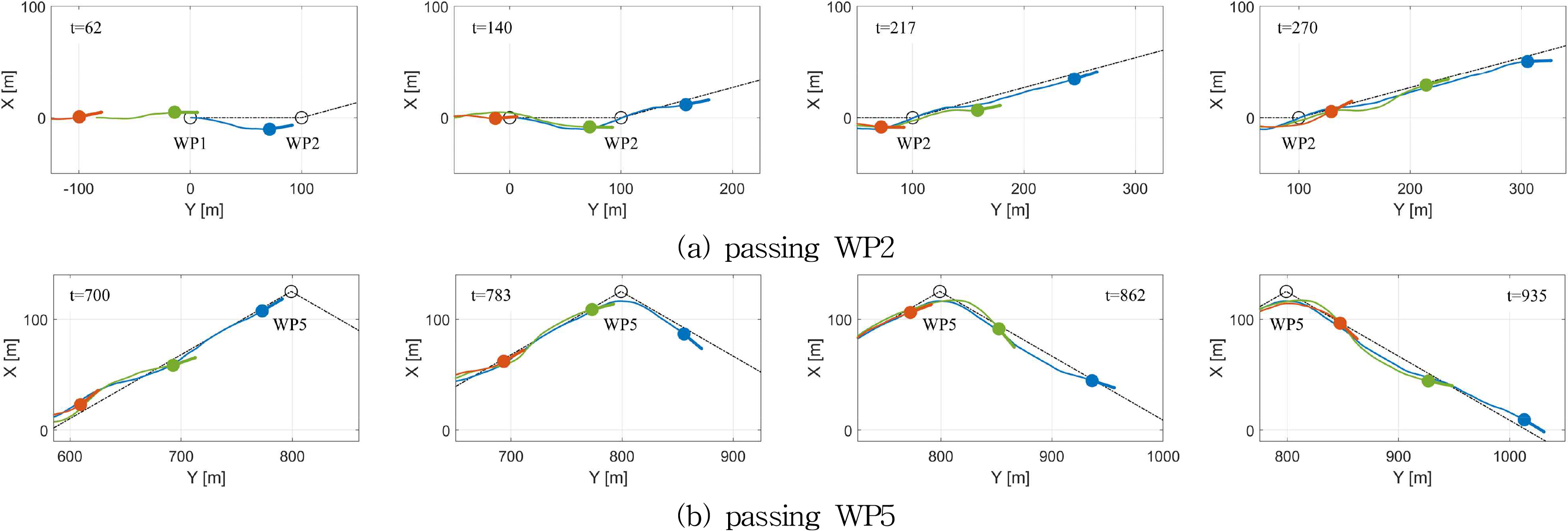
Fig. 6은 선박 세 척의 전체 항적, Fig. 7은 변침점 2(WP2)와 변침점 5(WP5)를 통과할 때의 모습을 시간 순서에 따라 나타낸 것이다. 리더 선박은 미리 정해진 항로를 따라 항해하였으며, 두 척의 추종 선박도 리더 선박의 경로를 따라 항해한 것을 확인할 수 있다. 다만 변침하는 각도가 60°로 가장 큰 WP5를 통과할 때는 약 5.5m의 이로(Deviation)가 발생한 것으로 나타났다.
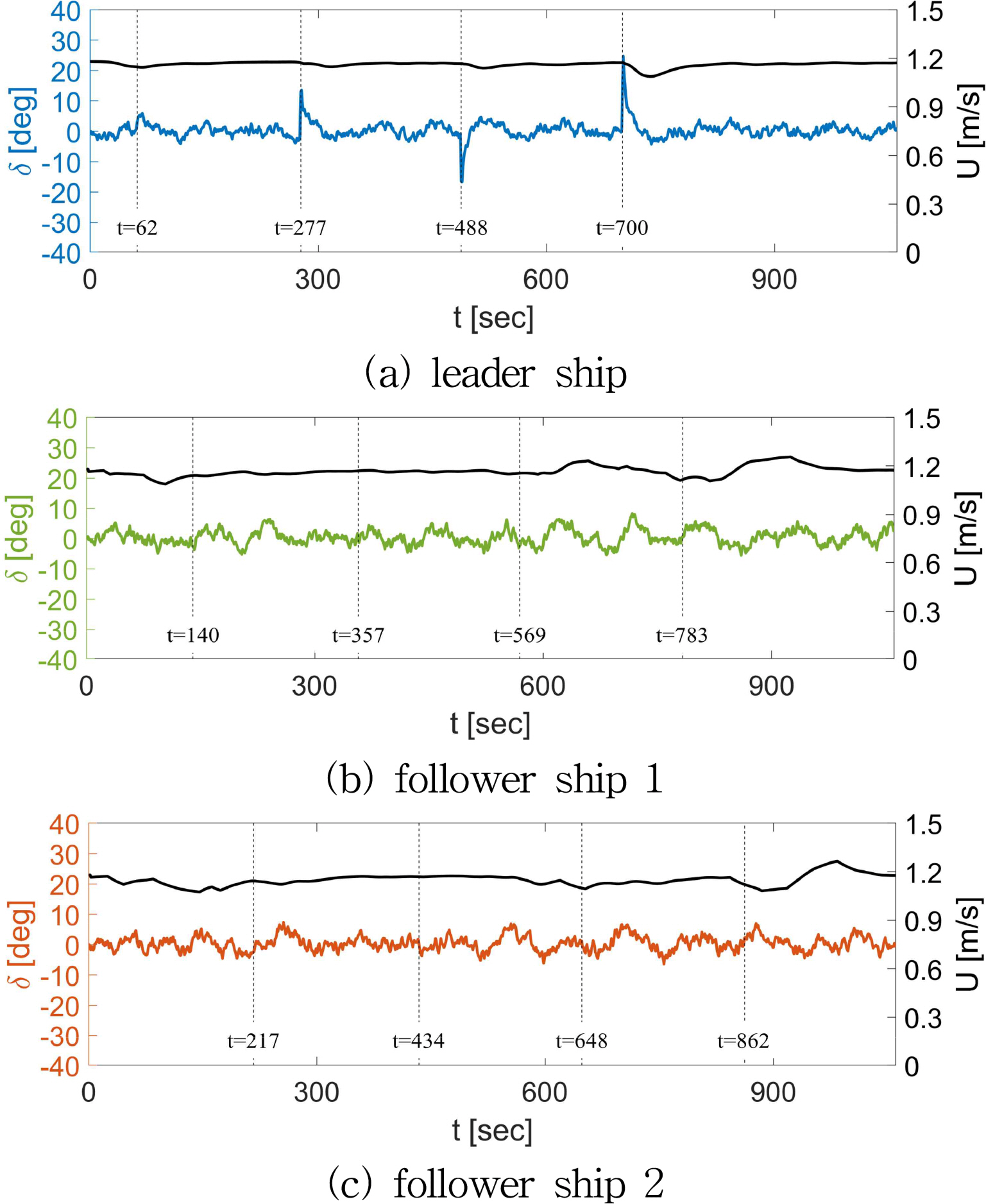
Fig. 8은 각 선박의 시간에 따른 타각(δ) 및 속력(U)을 나타낸 그래프이다. 그래프에 표시된 세로줄과 숫자는 왼쪽에서부터 각 선박이 변침점 2, 3, 4 및 5를 통과하기 위해 타를 사용하는 시점과 그때의 시각을 나타낸다. 리더 선박은 변침점을 통과할 때 침로를 변경하는 각이 클수록 더 큰 각도의 타를 사용하였으며, 최대 23°의 타를 사용한 것으로 나타났다. 리더 선박의 RPM은 일정하나 타각 사용으로 인해 속력이 감소되고, 타각이 클수록 속력도 더 큰 폭으로 감소하는 것을 알 수 있다. 반면 추종 선박은 변침점을 통과할 때 최대 6°의 타를 사용한 것으로 나타났다. 그 이유는 추종 선박이 변침점을 통과할 때, 리더 선박처럼 대각도로 변침하는 것이 아니라 리더 선박의 경로를 따라 천천히 작은 각도로 여러 번 변침하였기 때문이다. 추종 선박의 속력은 선박 간 거리를 유지하기 위해 초기 속력의 90~108% 범위 내에서 변화하는 것으로 나타났다.
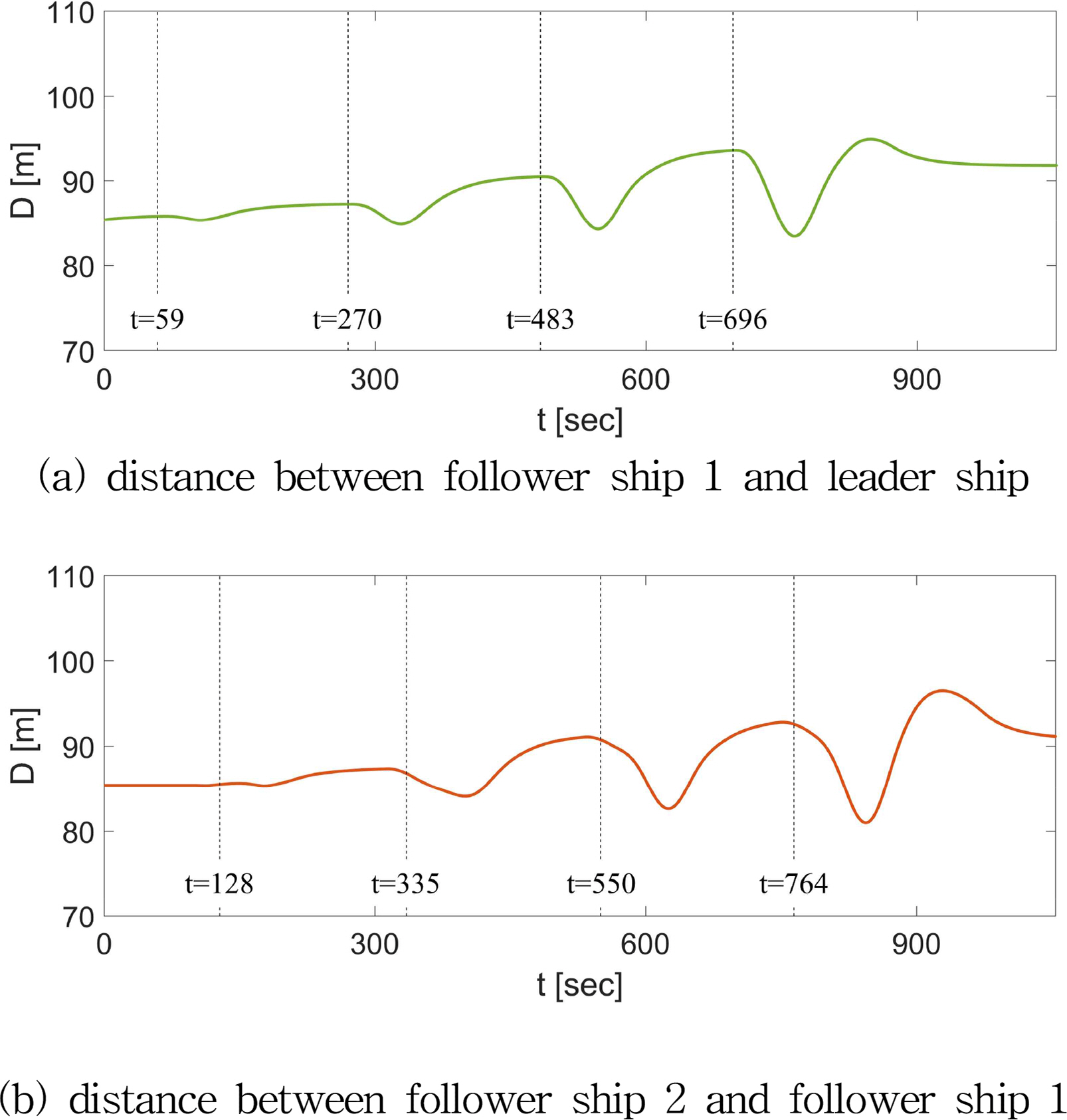
Fig. 9는 리더 선박과 추종 선박 1, 추종 선박 1과 추종 선박 2 사이의 거리(D)를 나타낸 그래프이다. 리더 선박이 변침점을 통과하면서 속력이 감소하면, 리더 선박과 추종 선박 1의 거리가 감소한다. 추종 선박 1은 안전거리를 확보하기 위해 감속하게 되고, 추종 선박 1과 추종 선박 2 사이의 거리가 감소한다. 따라서 추종 선박 2는 안전거리를 확보하기 위해 감속한다. 리더 선박이 다시 원래의 속력으로 회복하게 되면 추종 선박 1, 2가 증속을 하게 되고 안전거리가 확보되면 원래의 속력으로 돌아오게 된다. 각 선박 사이의 거리는 시뮬레이션 중 설정된 안전거리인 12.2L의 95~114% 범위를 유지하였다.
(2) 외력이 있는 경우
Fig. 10~13은 외력을 부가하였을 때의 시뮬레이션 결과를 나타낸다.
The entire trajectory of each ship in the second simulation
The trajectory of each ship by section in the second simulation
Rudder angle(δ) and speed(U) of each ship in the second simulation

Distance between ships in the second simulation
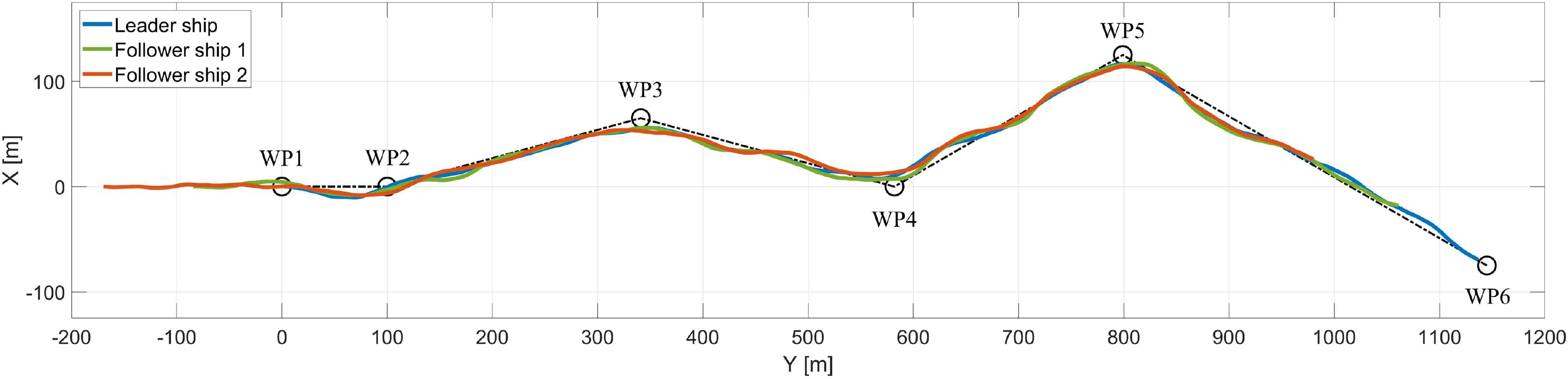
Fig. 10은 선박 세 척의 전체 항적, Fig. 11은 WP2와 WP5를 통과할 때의 모습을 시간 순서에 따라 나타낸 것이다. 외력을 부가하였기 때문에 변침점을 지날 때뿐만 아니라 변침하지 않고 직선으로 항해할 때에도 이로가 발생하는 것을 알 수 있다.
Fig. 12는 각 선박의 시간에 따른 타각(δ) 및 속력(U)을 나타낸다. 모든 선박이 외력으로 정침하기 위해 모든 구간에서 10° 이내의 타를 지속적으로 사용하였으며, 리더 선박은 변침점에서 대각도로 변침하기 위해 최대 25°의 타를 사용하였다. 리더 선박의 속력은 타각 사용으로 인해 감소되었으며, 추종 선박의 속력은 선박 간 거리를 유지하기 위해 초기 속력의 91~108% 범위 내에서 변화하였다.
Fig. 13은 각각 추종 선박 1과 리더 선박, 추종 선박 2와 추종 선박 1 사이의 거리(D)를 나타낸 그래프이다. 앞서 설명한 것처럼, 각 선박 사이의 거리는 선박의 속력과 밀접한 관계가 있는 것으로 나타났다. 부가된 외력이 선박의 속력에는 큰 영향을 미치지 않았기 때문에, 각 선박 사이의 거리는 안전거리의 95~114% 범위내에서 유지되었다.
5. 결 론
세계적으로 자율운항선박 기술개발이 활발히 진행되고 있지만, 완성도가 높지 못하여 아직 실제 항해에 사용되기는 어렵다. 이 연구에서는 자율운항선박의 애로사항들을 해소할 수 있는 방안으로, 한 척의 유인 리더 선박과 두 척의 추종 선박을 하나의 그룹으로 묶어 항해하는 그룹항해시스템을 개발하였다. 선박 간 충돌을 방지하기 위해 선박 간 안전거리를 설정하였으며, 추종 선박이 리더 선박이 지나온 경로를 추종하는 방법을 적용하였다. 그룹항해시스템을 검증하기 위해 시뮬레이션을 수행하였다. 선박조종운동 모델은 선박의 3자유도 운동을 표현하는 MMG standard model을 적용하였으며, 모델 선박으로는 KVLCC2의 L-7 모델을 사용하였다. 시뮬레이션 항로는 출발점에서 시작해 네 번 침로변경 후 목적지에 도착하도록 구성하였다. 시뮬레이션은 외력의 유무로 나누어 두 차례 수행되었다. 시뮬레이션 결과, 리더 선박은 설정된 항로를, 추종 선박은 리더 선박의 경로를 추종하여 항해하였다. 외력이 없는 경우, 리더 선박은 변침점에서 최대 23°의 타각을 사용하였고, 추종 선박은 리더 선박의 경로를 추종하여 항해하기 때문에 6° 이내의 타각을 사용한 것으로 나타났다. 외력을 부가한 경우, 선박을 침로 상에 정침시키기 위해 10° 이내의 타를 지속적으로 사용하는 것을 확인하였다. 리더 선박의 속력은 타를 사용한 구간에서 감소하였으며, 타를 크게 사용할수록 속력도 이와 비례하여 크게 감소되었다. 추종 선박의 속력은 선박 간 안전거리확보를 위하여 감소 또는 증가하였으며, 초기속력의 90~108% 범위 내에서 동작하였다. 각 선박 사이의 거리는 변침점을 통과할 때 감소하였으나, 시뮬레이션이 종료될 때까지 안전거리인 12.2L의 95~114% 범위를 유지하였다.
향후 연구에서는 제안한 선박 그룹항해시스템을 선박에 탑재하고, 해상실험을 통해 그 유효성을 검증하고자 한다. 또한 항행 형태로 삼각형(Triangular shape), 마름모형(Diamond shape), 쐐기형(Wedge shape) 등 다양한 형태를 검토하고, 각각의 장단점을 비교하여 선박 그룹항해시스템에 최적 형태를 찾아내고자 한다.