


1. ņä£ ļĪĀ
ņØ╝ļ░śņĀüņ£╝ļĪ£ ĒĢ┤ņāü ļĀłņØ┤ļŹöļŖö ĒĢ┤ņāüņØä ņÜ┤ĒĢŁĒĢśļŖö ņäĀļ░ĢņŚÉņä£ ņé¼ņÜ®ĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņäżĻ│äļÉ£ ļĀłņØ┤ļŹö ņןņ╣śļĪ£ņä£, ņÜ┤ĒĢŁ ņżæ ĒĢ┤ņāüņØś ņןņĢĀļ¼╝, ĒåĄĒ¢ē ņäĀļ░Ģ, ĒĢ┤ņĢł ļō▒ņØś ņ¦ĆĒśĢņ¦Ćļ¼╝ņØä ĒāÉņ¦ĆĒĢśņŚ¼ ņ£äņ╣śļź╝ ĒÖĢņØĖĒĢśĻ▒░ļéś, ņČ®ļÅīņØä ļ░®ņ¦ĆĒĢśļŖö ļ¬®ņĀüņ£╝ļĪ£ ņé¼ņÜ®ļÉśļŖö ĒĢ┤ņāüņŚÉņä£ņØś ņĢłņĀä ĒĢŁĒĢ┤ļź╝ ņ¦ĆņøÉĒĢśļŖö ņäĀļ░ĢņØś ņŻ╝ņÜö ĒĢŁĒĢ┤ ņןļ╣ä ņżæņØś ĒĢśļéśņØ┤ļŗż(Lee, 2015).
ņØ┤ļ¤¼ĒĢ£ ĒĢŁĒĢ┤ņÜ® ļĀłņØ┤ļŹöļŖö ņØ╝ļ░śņĀüņ£╝ļĪ£ ņŖżņ║Éļäł, ņŗĀĒśĖņ▓śļ”¼ņןņ╣ś, ņĀäņŗ£ĻĖ░ļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ņ£╝ļ®░, ļĀłņØ┤ļŹöņØś ņŖżņ║ÉļäłļĪ£ļČĆĒä░ ĒāÉņ¦ĆļÉ£ ļ¼╝Ēæ£ļōżņØĆ ņĢäļéĀļĪ£ĻĘĖ ņŗĀĒśĖļĪ£ņä£ ņŗĀĒśĖ ņ▓śļ”¼ņןņ╣śņŚÉ ņĀäļŗ¼ļÉśļ®░, ņŗĀĒśĖņ▓śļ”¼ņןņ╣śņŚÉņä£ ņ▓śļ”¼ļÉ£ ņŗĀĒśĖļŖö ļööņ¦ĆĒäĖ ņśüņāü ļŹ░ņØ┤Ēä░ļĪ£ņä£ ņĀäņŗ£ĻĖ░ņŚÉ ņĀäļŗ¼ļÉ£ļŗż.
ņØ┤ļĢī ņĀäļŗ¼ļÉśļŖö ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░ļŖö ņØ╝ļ░śņĀüņ£╝ļĪ£ Asterix CAT 240(ņØ┤ĒĢś ŌĆ£AsterixŌĆØ) Ēæ£ņżĆ Ēżļ¦ĘņØ┤ ņé¼ņÜ®ļÉ£ļŗż.
Asterix Ēżļ¦ĘņØĆ ļ░®ņ£ä/Ļ▒░ļ”¼ ņĀĢļ│┤ļź╝ ĒżĒĢ©ĒĢ£ ļĀłņØ┤ļŹö ļ░śņé¼ĒīīņØś ņäĖĻĖ░ļź╝ ļööņ¦ĆĒäĖĒÖöĒĢśņŚ¼ ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ņĀäņåĪĒĢśļŖöļŹ░, ļ░®ņ£ä/Ļ▒░ļ”¼ ņĀĢļ│┤ņØś ĒĢ┤ņāüļÅäļŖö Ļ│ĀņĀĢļÉśņ¢┤ ņ׳ņ¦Ć ņĢŖĻ│Ā ņé¼ņÜ®ņ×ÉĻ░Ć ņ×äņØśļĪ£ ņĀĢĒĢśņŚ¼ ĒÖ£ņÜ®ĒĢĀ ņłś ņ׳ļŖö ĒŖ╣ņ¦ĢņØ┤ ņ׳ļŗż.
ņØ┤ņŚÉ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņäĀļ░ĢņŚÉ Ēāæņ×¼ļÉśņ¢┤ ĒÖ£ņÜ®ļÉśļŖö ĒĢ┤ņāüņÜ® ļĀłņØ┤ļŹö ņŗ£ņŖżĒģ£ņŚÉ ņĀüĒĢ®ĒĢ£ Asterix Ēżļ¦ĘņØä ņ░ŠĻĖ░ ņ£äĒĢśņŚ¼, ņŖżņ║ÉļäłņØś ĒŖ╣ņä▒ņØä Ļ│ĀļĀżĒĢ£ ļ░®ņ£ä ļ░Å Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä ņĄ£ņĀüĒÖö Ļ│ĄņŗØņØä ļÅäņČ£ĒĢśņśĆņ£╝ļ®░, ņØ┤ņŚÉ ļö░ļźĖ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä ņĖĪņĀĢĒĢśņśĆļŗż.
ņØ┤ Ļ│╝ņĀĢņŚÉņä£ ņŖżņ║Éļäł ĒŖ╣ņä▒ ĻĖ░ļ░śņØś ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ ņé¼ņÜ® ņŗ£, ĒāÉņ¦ĆĻ▒░ļ”¼Ļ░Ć ņ”ØĻ░ĆĒĢĀņłśļĪØ ņāüļŗ╣ĒĢ£ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ ļ░Å ĒöäļĪ£ņäĖņä£ ļĪ£ļō£Ļ░Ć ļ░£ņāØĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢśņśĆļŗż. ļåÆņØĆ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØĆ ļäżĒŖĖņøīĒü¼ ĻĖ░ļ░ś ĒĢŁĒĢ┤ ņןļ╣äļōżņØś ņŚ░ļÅÖņŚÉ ņśżļÅÖņ×æņØä ņ┤łļלĒĢĀ ņłś ņ׳ņ£╝ļ»ĆļĪ£, ņ£ĀĒÜ©ĒĢ£ ņśüņāü ļŹ░ņØ┤Ēä░ņØś ņåīņŗżņØä ņĄ£ņåīĒÖöĒĢśļ®┤ņä£ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä Ļ░Éņåīņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ ĒĢ┤Ļ▓░ļ░®ņĢłņØä ļ¬©ņāēĒĢśņśĆļŗż. ĻĘĖ Ļ▓░Ļ│╝, ļĀłņØ┤ļŹö ņŖżņ║ÉļäłņØś ņ£äņ╣śļź╝ ņżæņŗ¼ņ£╝ļĪ£ļ¦ī ļĀłņØ┤ļŹö ņśüņāüņØä ņĀäņŗ£ĒĢśļŖö ņäĀļ░ĢņÜ® ļĀłņØ┤ļŹöņØś ĒŖ╣ņ¦ĢņØä ļ░śņśüĒĢśņŚ¼, ņĀäņŗ£ĻĖ░ņØś ĒÖöļ®┤ ĒĢ┤ņāüļÅä ĒŖ╣ņä▒ņŚÉ ļö░ļØ╝ Asterix Ēżļ¦ĘņØś ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ ņĄ£ņĀüĒÖöĒĢśļŖö ļ░®ņĢłņØä ņŚ░ĻĄ¼ĒĢśņśĆļŗż.
2. Asterix CAT 240 Ēżļ¦Ę ĻĄ¼ņĪ░
Asterix(All Purpose STructured Eurocontrol suRveillance Information eXchange)ņØĆ Ēæ£ņżĆ ļĀłņØ┤ļŹö Ļ░Éņŗ£ņ×ÉļŻī Ēżļ¦Ęņ£╝ļĪ£ņä£ EurocontrolņŚÉņä£ ņĀ£ņĀĢĒĢśņśĆļŗż(Kim, 2014).
Asterix Ēżļ¦ĘņØĆ Ļ░ü CellņØś ļ╣äļööņśż ņĀĢļ│┤ļź╝ ĒżĒĢ©ĒĢśĻ│Ā ņ׳ļŖö Block DataņÖĆ Block ļ░Å CellņØś ņĀĢļ│┤ļź╝ ņäżļ¬ģĒĢśļŖö HeaderļĪ£ ĻĄ¼ļČäĒĢĀ ņłś ņ׳ļŗż. HeaderļŖö CellņØś Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäņŚÉ ļö░ļØ╝ NanoņÖĆ Femto ļæÉ Ļ░Ćņ¦ĆĻ░Ć ņ׳ņ£╝ļ®░, Block DataļŖö Ļ░ü ļŹ░ņØ┤Ēä░ņØś Ēī©ĒéĘ Ēü¼ĻĖ░ņŚÉ ļö░ļØ╝ Low, Medium, High ņäĖ Ļ░Ćņ¦ĆļĪ£ ĻĄ¼ļČäļÉ£ļŗż(Eucontrol, 2007). ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņé¼ņÜ®ņ×ÉļŖö ļ¬®ņĀüņŚÉ ļö░ļØ╝ ņĀüņĀłĒĢ£ Asterix CAT 240 Ēżļ¦ĘņØä ņĀĢņØśĒĢśņŚ¼ ņé¼ņÜ®ĒĢ£ļŗż.
2.1 Video Block Data
Video BlockņØĆ ĒŖ╣ņĀĢ ĒāÉņ¦Ć ĻĄ¼ņŚŁņŚÉ ļīĆĒĢ┤ Radar Video ļŹ░ņØ┤Ēä░ļź╝ ņĀäļŗ¼ĒĢśļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż. BlockņØĆ ņĄ£ļīĆ 255Ļ░£ļĪ£ ĻĄ¼ņä▒ļÉĀ ņłś ņ׳ņ£╝ļ®░, ņĀäņåĪĒĢśĻ│Āņ×É ĒĢśļŖö ĒĢ£ ļ░®ņ£äņØś ņśüņāü ļŹ░ņØ┤Ēä░ Ēü¼ĻĖ░ņŚÉ ļö░ļØ╝ Table 1ņŚÉ Ēæ£ĻĖ░ļÉ£ ņĀüņĀłĒĢ£ ĒśĢņŗØņØś BlockņØä ņé¼ņÜ®ĒĢ£ļŗż(Eucontrol, 2015).
Ļ░üĻ░üņØś BlockņØĆ ņŚ¼ļ¤¼ Ļ░£ņØś Cell ļŹ░ņØ┤Ēä░ļź╝ ĒżĒĢ©ĒĢśĻ│Ā ņ׳ņ£╝ļ®░, Ļ░ü CellņØś ļŹ░ņØ┤Ēä░ļŖö ņĀäņåĪĒĢśļŖö Video ļŹ░ņØ┤Ēä░ ĒĢ┤ņāüļÅäņŚÉ ļö░ļØ╝ 1 ļśÉļŖö 2ļ░öņØ┤ĒŖĖņØś Ēü¼ĻĖ░ļź╝ Ļ░Ćņ¦äļŗż.
2.2 Video Header
Video BlockņØĆ ĒŖ╣ņĀĢ ĒāÉņ¦Ć ĻĄ¼ņŚŁņŚÉ ļīĆĒĢ┤ Radar Video ļŹ░ņØ┤Ēä░ļź╝ ņĀäļŗ¼ĒĢśļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż. BlockņØĆ ņĄ£ļīĆ 255Ļ░£ļĪ£ ĻĄ¼ņä▒ļÉĀ ņłś ņ׳ņ£╝ļ®░, ņĀäņåĪĒĢśĻ│Āņ×É ĒĢśļŖö ĒĢ£ ļ░®ņ£äņØś ņśüņāü ļŹ░ņØ┤Ēä░ Ēü¼ĻĖ░ņŚÉ ļö░ļØ╝ Table 1ņŚÉ Ēæ£ĻĖ░ļÉ£ ņĀüņĀłĒĢ£ ĒśĢņŗØņØś BlockņØä ņé¼ņÜ®ĒĢ£ļŗż(Eucontrol, 2015).
Video HeaderļŖö Video Block DataņŚÉ ĒżĒĢ©ļÉ£ Ļ░ü CellņŚÉ ļīĆĒĢ£ ļŹ░ņØ┤Ēä░Ļ░Ć ņ¢┤ļ¢ĀĒĢ£ ļ▓öņ£äņŚÉ ņĀüņÜ®ļÉśļŖöņ¦Ć ņäżļ¬ģĒĢśļŖö ņŚŁĒĢĀņØä ĒĢ£ļŗż. 12ļ░öņØ┤ĒŖĖņØś Ēü¼ĻĖ░ļź╝ Ļ░Ćņ¦Ćļ®░, ļ░®ņ£äņŚÉ ļīĆĒĢ£ ņĀĢļ│┤ 4ļ░öņØ┤ĒŖĖņÖĆ Ļ▒░ļ”¼ņŚÉ ļīĆĒĢ£ ņĀĢļ│┤ 8ļ░öņØ┤ĒŖĖļĪ£ ĻĄ¼ņä▒ļÉ£ļŗż.
ņ▓½ 2ļ░öņØ┤ĒŖĖļŖö ņĀüņÜ® ļ▓öņ£äņØś ņŗ£ņ×æ ļ░®ņ£äļź╝ ņØśļ»ĖĒĢśļ®░, ņØ┤Ēøä 2ļ░öņØ┤ĒŖĖļŖö ņóģļŻī ļ░®ņ£äļź╝ ņØśļ»ĖĒĢ£ļŗż. ļŗżņØī 4ļ░öņØ┤ĒŖĖļŖö ņĢłĒģīļéś ņ£äņ╣śļĪ£ļČĆĒä░ ņśüņāü ļŹ░ņØ┤Ēä░ ļ▓öņ£äņØś ņŗ£ņ×æņĀÉĻ╣īņ¦ĆņØś Ļ▒░ļ”¼ļź╝ CellņØś Ļ░£ņłśļĪ£ ļéśĒāĆļéĖļŗż. ĻĘĖļ”¼Ļ│Ā Ļ░ü CellņØś Ļ▒░ļ”¼ļŖö ļŗżņØīņ£╝ļĪ£ ņśżļŖö 4ļ░öņØ┤ĒŖĖņŚÉ ĒżĒĢ©ļÉ£ļŗż. Cell Ļ▒░ļ”¼ ņĀĢļ│┤ņØś LSBņŚÉ ļö░ļØ╝ HeaderļŖö NanoņÖĆ Femto 2Ļ░Ćņ¦Ć ĒśĢņŗØņ£╝ļĪ£ ļČäļźśļÉ£ļŗż.
3. ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀüĒĢ┤ņāüļÅä
ņäĀļ░ĢņŚÉņä£ ĒÖ£ņÜ®ļÉśļŖö Asterix Ēżļ¦ĘņØä ņĀĢĒśĢĒÖöĒĢśĻĖ░ ņ£äĒĢ£ ļ░®ņĢłņ£╝ļĪ£ņŹ©, ņŖżņ║ÉļäłņØś ĒŖ╣ņä▒ņŚÉ ļö░ļØ╝ ņĀüņĀłĒĢ£ ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ ņé░ņČ£ĒĢśĻ│Ā ņØ┤ļź╝ ļ░öĒāĢņ£╝ļĪ£ Asterix Ēżļ¦ĘņØä ņĀĢņØśĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā ņĀĢņØśļÉ£ Ēżļ¦ĘņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ņśüņāüļŹ░ņØ┤Ēä░ļź╝ ņĀäņåĪĒĢśĻ│Ā, ņĀäņŗ£ĻĖ░ņŚÉ Ēæ£ņŗ£ļÉ£ Ļ▓░Ļ│╝ļź╝ ņ£ĪņĢłņ£╝ļĪ£ ĒÖĢņØĖĒĢ©ņ£╝ļĪ£ņŹ© ņé░ņČ£ ļ░®ņŗØņØś ņ£ĀĒÜ©ņä▒ņØä Ļ▓Ćņ”ØĒĢśņśĆļŗż.
3.2 PRFņŚÉ ļö░ļźĖ ļ░®ņ£ä ĒĢ┤ņāüļÅä Ļ│äņé░
PRF(Pulse Repetition Frequency)ļŖö ļĀłņØ┤ļŹö ņŖżņ║ÉļäłņØś 1ņ┤łļŗ╣ ņĀäĒīī ļ░£ņŗĀ ĒܤņłśļĪ£ņä£, ņŖżņ║Éļäłļź╝ ĻĖ░ņżĆņ£╝ļĪ£ 360ļÅä ņĀä ļ░®ņ£äļź╝ ĒāÉņ¦ĆĒĢśĻĖ░ ņ£äĒĢ£ ņĀäĒīīņØś ņ┤Ø ļ░£ņŗĀ Ēܤņłśļź╝ Ļ│äņé░ĒĢśĻĖ░ ņ£äĒĢ£ ĻĖ░ņżĆņØ┤ ļÉ£ļŗż. PRF Ļ░ÆņØ┤ Ēü┤ņłśļĪØ ļ░®ņ£ä 1ļÅäļŗ╣ ņĀäĒīī ļ░£ņŗĀ ĒܤņłśĻ░Ć ļ¦ÄņĢäņ¦Ćļ»ĆļĪ£, ņŖżņ║ÉļäłņØś ĒāÉņ¦Ć ļ░®ņ£äĒĢ┤ņāüļÅäĻ░Ć ļåÆņĢäņ¦äļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż.
ņŖżņ║ÉļäłņØś 1ĒÜīņĀä(360ļÅä)ņŚÉ ļ░£ņŗĀļÉśļŖö ņĀäĒīīņØś ņłś(C)ļŖö ņŖżņ║ÉļäłņØś ĒÜīņĀä ņåŹļÅä(RPM)ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ļŗżņØīĻ│╝ Ļ░ÖņØ┤ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż.
f : PRF
r : RPM
ņŖżņ║ÉļäłņØś PRFļź╝ fļØ╝Ļ│Ā ĒĢśĻ│Ā ņŖżņ║ÉļäłņØś RPMņØä rņØ┤ļØ╝Ļ│Ā ĒĢĀ ļĢī, ņŖżņ║Éļäł 1ĒÜīņĀä ļŗ╣ ņĀäĒīī ļ░£ņŗĀ ĒܤņłśļŖö ņŗØ(1)Ļ│╝ Ļ░Öņ£╝ļ®░, ĒĢśļéśņØś ņĀäĒīīļź╝ ĒåĄĒĢ┤ ĒāÉņ¦ĆĒĢśļŖö ļ░®ņ£äĻ░üņØĆ ņŗØ(2)ņÖĆ Ļ░ÖņØ┤ ļÅäņČ£ļÉ£ļŗż.
ļö░ļØ╝ņä£, ņŗ£ĒŚśņŚÉ ņé¼ņÜ®ļÉ£ Sperry Marine ņé¼ņØś X-Band 8 ft ScannerļŖö Short PulseņÖĆ Medium PulseņŚÉņä£ 1,760HzņØś PRF ļ░Å 28 RPMņØś ņä▒ļŖźņØä Ļ░Ćņ¦Ćļ®░, ņØ┤ Ļ▓ĮņÜ░ ņĀäĒīī ĒĢśļéśĻ░Ć ņ¦ĆņøÉĒĢśļŖö ņĀüņĀłĒĢ£ ļ░®ņ£ä ĒĢ┤ņāüļÅäļŖö 0.095ļÅäĻ░Ć ļÉ£ļŗż. ļśÉĒĢ£ ņØ┤ ļ░®ņ£ä ĒĢ┤ņāüļÅäļŖö ņŖżņ║Éļäłļź╝ ĒåĄĒĢ┤ ĒÜŹļōØ Ļ░ĆļŖźĒĢ£ ļĀłņØ┤ļŹö ņśüņāüņØś ņĄ£ļīĆ ĒĢ┤ņāüļÅäļØ╝Ļ│Ā ĒĢĀ ņłś ņ׳ļŗż.
3.3 Pulse LengthņŚÉ ļö░ļźĖ Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä Ļ│äņé░
Pulse LengthļŖö ņŖżņ║ÉļäłĻ░Ć ļ░£ņŗĀĒĢśļŖö ņĀäĒīīņØś ĻĖĖņØ┤ļĪ£ņä£, ļĀłņØ┤ļŹöņØś Ļ▒░ļ”¼ ļČäĒĢ┤ļŖźĻ│╝ Ļ┤ĆļĀ©ņØ┤ ņ׳ļŗż. Ļ▒░ļ”¼ ļČäĒĢ┤ļŖźņØĆ Ļ░ĆĻ╣īņØ┤ ņŻ╝ņ¢┤ņ¦ĆļŖö 2Ļ░£ ļśÉļŖö ĻĘĖ ņØ┤ņāüņØś Ēæ£ņĀüļōżņØä Ļ▒░ļ”¼ņŚÉ ļö░ļØ╝ ĻĄ¼ļ│äĒĢśļŖö ļĀłņØ┤ļŹöņØś ļŖźļĀźņØä ņØśļ»ĖĒĢśļ®░, ņØ┤ļĪĀņāü Pulse LengthņØś 1/2ņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö Ļ▒░ļ”¼ļź╝ Ļ░Ćņ¦äļŗż(Kim, 2017).
ņśüņāüļŹ░ņØ┤Ēä░Ļ░Ć Ļ▒░ļ”¼ļČäĒĢ┤ļŖź ņØ┤ņāüņØś Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ Ļ░¢ļŖö Ļ▓āņØĆ ļČłĒĢäņÜöĒĢ£ ļŹ░ņØ┤Ēä░ ņĀäņåĪņØä ņĢ╝ĻĖ░ĒĢ£ļŗżĻ│Ā ļ│╝ ņłś ņ׳ņ£╝ļ»ĆļĪ£, Asterix Ēżļ¦Ęņ£╝ļĪ£ ņĀäņåĪĒĢśļŖö ņśüņāü ļŹ░ņØ┤Ēä░ņØś Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļŖö ņŗØ(3)ņŚÉ ļö░ļźĖ ņŗØ(4)ņÖĆ Ļ░ÖņØ┤ ņäżņĀĢĒĢśļŖö Ļ▓āņØ┤ ņĀüņĀüĒĢśļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£,
c = ļ╣øņØś ņåŹļÅä(m/s)
Žä = ĒÄäņŖż ĒÅŁ(s)
PL = Pulse Length
ļö░ļØ╝ņä£, ņŗ£ĒŚśņŚÉ ņé¼ņÜ®ļÉ£ Sperry Marine ņé¼ņØś X-Band 8 ft ScannerļŖö MPņŚÉņä£ 250 nsņØś Pulse Length Ļ░ÆņØä Ļ░Ćņ¦Ćļ®░, ņØ┤ Ļ▓ĮņÜ░ ņĀäĒīīņØś Ļ▒░ļ”¼ ļČäĒĢ┤ļŖźņŚÉ ļö░ļźĖ ņĀüņĀłĒĢ£ Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļŖö 125 nsĻ░Ć ļÉ£ļŗż.
3.4 ļ░®ņ£äĒĢ┤ņāüļÅä ņ£ĀĒÜ©ņä▒ Ļ▓Ćņ”Ø
ņŗØ(1)Ļ│╝ ņŗØ(2)ņŚÉ ļīĆĒĢ£ ņ£ĀĒÜ©ņä▒ņØä Ļ▓Ćņ”ØĒĢśĻĖ░ ņ£äĒĢ┤, ņŗ£ĒŚśņÜ® ņŖżņ║ÉļäłņØś ņĄ£ņåī, ņĄ£ņĀü ļ░Å ņĄ£ļīĆ ņä▒ļŖźņØś ļ░®ņ£ä ĒĢ┤ņāüļÅäļź╝ ņäżņĀĢĒĢśņŚ¼ ĒŖ╣ņĀĢ ļ¼╝Ēæ£ņØś Ēæ£ņŗ£ ņāüĒā£ļź╝ ņ£ĪņĢłņ£╝ļĪ£ ĒÖĢņØĖ ļ░Å ļ╣äĻĄÉĒĢśĻĖ░ļĪ£ ĒĢśņśĆļŗż.
ĒĢśņ¦Ćļ¦ī, ņŗØ(1)Ļ│╝ ņŗØ(2)ļź╝ ĒåĄĒĢ┤ ņé░ņČ£ļÉ£ ņĄ£ņĀü ļ░®ņ£äĒĢ┤ņāüļÅäĻ░Ć ņŖżņ║Éļäłļź╝ ĒåĄĒĢ┤ ĒÜŹļōØ Ļ░ĆļŖźĒĢ£ ļĀłņØ┤ļŹö ņśüņāüņØś ņĄ£ļīĆ ļ░®ņ£äĒĢ┤ņāüļÅäņÖĆ ļÅÖņØ╝ĒĢśļ»ĆļĪ£ ņĄ£ļīĆ ļ░®ņ£äĒĢ┤ņāüļÅä ņäżņĀĢņŚÉ ļīĆĒĢ£ ņŗ£ĒŚśņØä ņĀ£ņÖĖĒĢśņśĆļŗż. ĻĘĖļ”¼Ļ│Ā ņŗĀĒśĖņ▓śļ”¼ņןņ╣śņŚÉņä£ ņäżņĀĢ Ļ░ĆļŖźĒĢ£ ļ░®ņ£äĒĢ┤ņāüļÅä Ļ░Æ ļæÉ Ļ░Ćņ¦Ćļź╝ ĒÖ£ņÜ®ĒĢśņŚ¼, ļ░®ņ£äĒĢ┤ņāüļÅä ņäżņĀĢ Ļ░Æ ļ│ĆĒÖöņŚÉ ļö░ļźĖ ļĀłņØ┤ļŹö ņśüņāü Ēæ£ņŗ£ ņāüĒā£ļź╝ ļ╣äĻĄÉĒĢśņśĆļŗż.
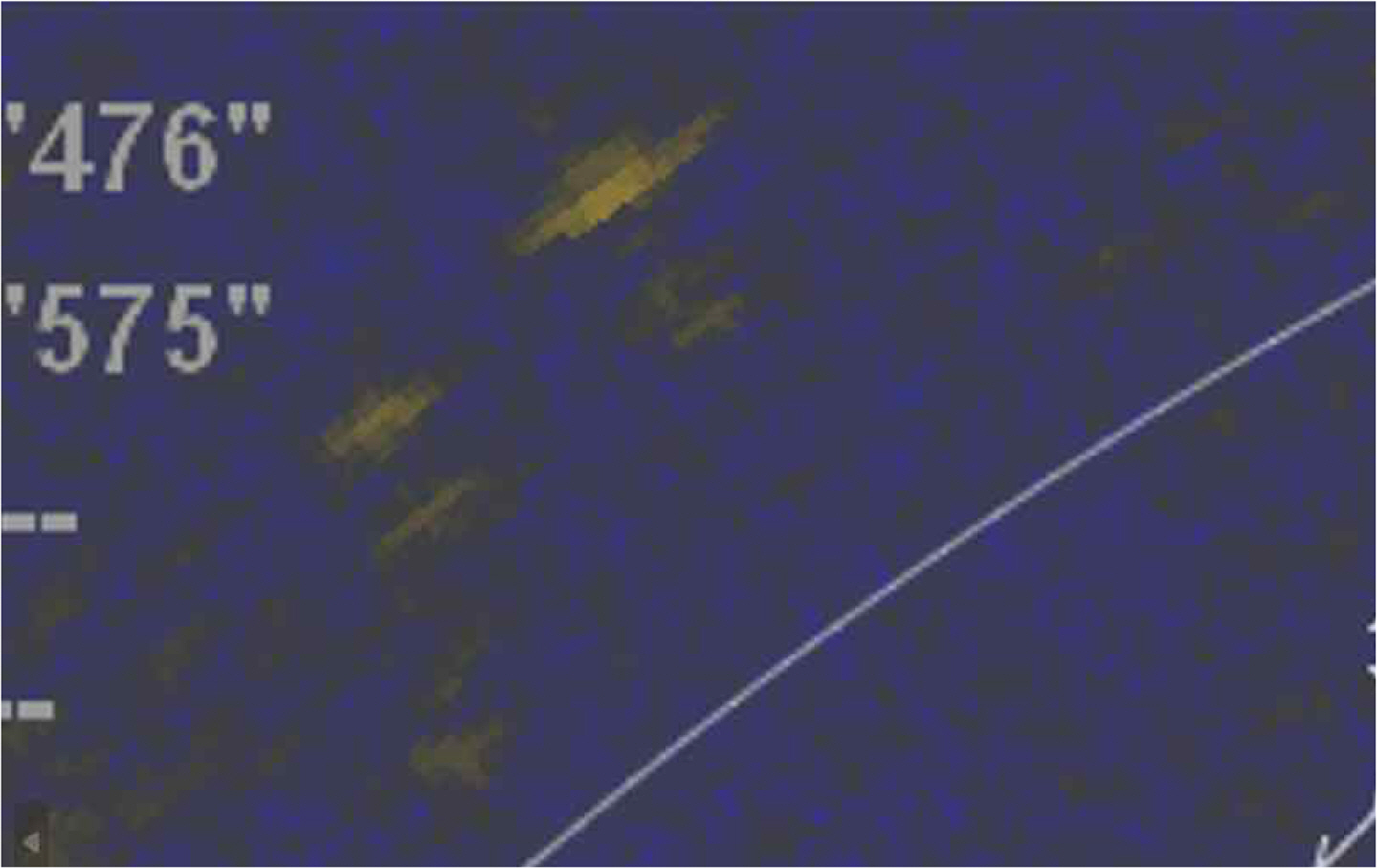
ļ░®ņ£ä ĒĢ┤ņāüļÅä ņäżņĀĢņŚÉ ļö░ļźĖ ļĀłņØ┤ļŹö ņśüņāüņØś Ēæ£ņŗ£ ņāüĒā£ļź╝ ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢśņŚ¼, ņŖżņ║Éļäł ņ£äņ╣śļĪ£ļČĆĒä░ ņĢĮ 1 Ļ│╝ 1.1 Ēé¼ļĪ£ļ»ĖĒä░ ņé¼ņØ┤ņØś ņ¦ĆņĀÉņØä ĒāÉņ¦Ć ļ¬®Ēæ£ ņ¦ĆņĀÉņ£╝ļĪ£ ņäżņĀĢĒĢśņśĆļŗż.
ņŗ£ĒŚśņŚÉļŖö 1,760HzņØś PRF ņä▒ļŖźņØä Ļ░¢ļŖö Medium Pulseļź╝ ņé¼ņÜ®ĒĢśņśĆņ£╝ļ®░, ļ░®ņ£ä ĒĢ┤ņāüļÅäļŖö ņĄ£ņĀü ļ░®ņ£äĒĢ┤ņāüļÅäņØĖ 3,770ņŚÉ ĻĘ╝ņĀæĒĢ£ ņŗĀĒśĖ ņ▓śļ”¼ņןņ╣śņŚÉņä£ ņ¦ĆņøÉĒĢśļŖö ļæÉ Ļ░Æ(2,048 ļ░Å 1,024)ņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
ņĢĮ 1,000ļ»ĖĒä░ņØś Ļ▒░ļ”¼ļź╝ ĒÖĢļīĆĒĢśņŚ¼ ļ╣äĻĄÉĒĢ┤ ļ│┤ņĢśņØä ļĢī, ļ░®ņ£ä ĒĢ┤ņāüļÅäņØś Ļ░ÆņØ┤ Ēü┤ņłśļĪØ ļ¬®Ēæ£ļ¼╝ņØś ļĀłņØ┤ļŹö ņśüņāü Ēæ£ņŗ£Ļ░Ć ņäĀļ¬ģĒĢ┤ ņ¦ĆļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ ļŹ░ņØ┤Ēä░ ņåīņŗżņŚåļŖö ļĀłņØ┤ļŹö ņśüņāüņØä ņ¢╗ĻĖ░ ņ£äĒĢ£ ņĄ£ņĀü(ņĄ£ļīĆ) ļ░®ņ£äĒĢ┤ņāüļÅä ņé░ņČ£ņŚÉ ņé¼ņÜ®ļÉ£, ņŗØ(1)Ļ│╝ ņŗØ(2)ņØś ņ£ĀĒÜ©ņä▒ņØä ĒÖĢņØĖĒĢśņśĆļŗż.
3.5 Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä ņ£ĀĒÜ©ņä▒ Ļ▓Ćņ”Ø
3.3ņŚÉņä£ ļÅäņČ£ļÉ£ ņŗØ(3)Ļ│╝ ņŗØ(4)ņØś Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä ņé░ņČ£ ļ░®ņŗØņŚÉ ļīĆĒĢ£ ņ£ĀĒÜ©ņä▒ņØä Ļ▓Ćņ”ØĒĢśĻĖ░ ņ£äĒĢ┤, ņŗ£ĒŚśņÜ® ņŖżņ║ÉļäłņØś ņĄ£ņĀü ļ░Å ņĄ£ļīĆ Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ ņäżņĀĢĒĢśņŚ¼ ĒŖ╣ņĀĢ ļ¼╝Ēæ£ņØś Ēæ£ņŗ£ ņāüĒā£ļź╝ ņ£ĪņĢłņ£╝ļĪ£ ĒÖĢņØĖ ļ░Å ļ╣äĻĄÉĒĢśĻĖ░ļĪ£ ĒĢśņśĆļŗż.
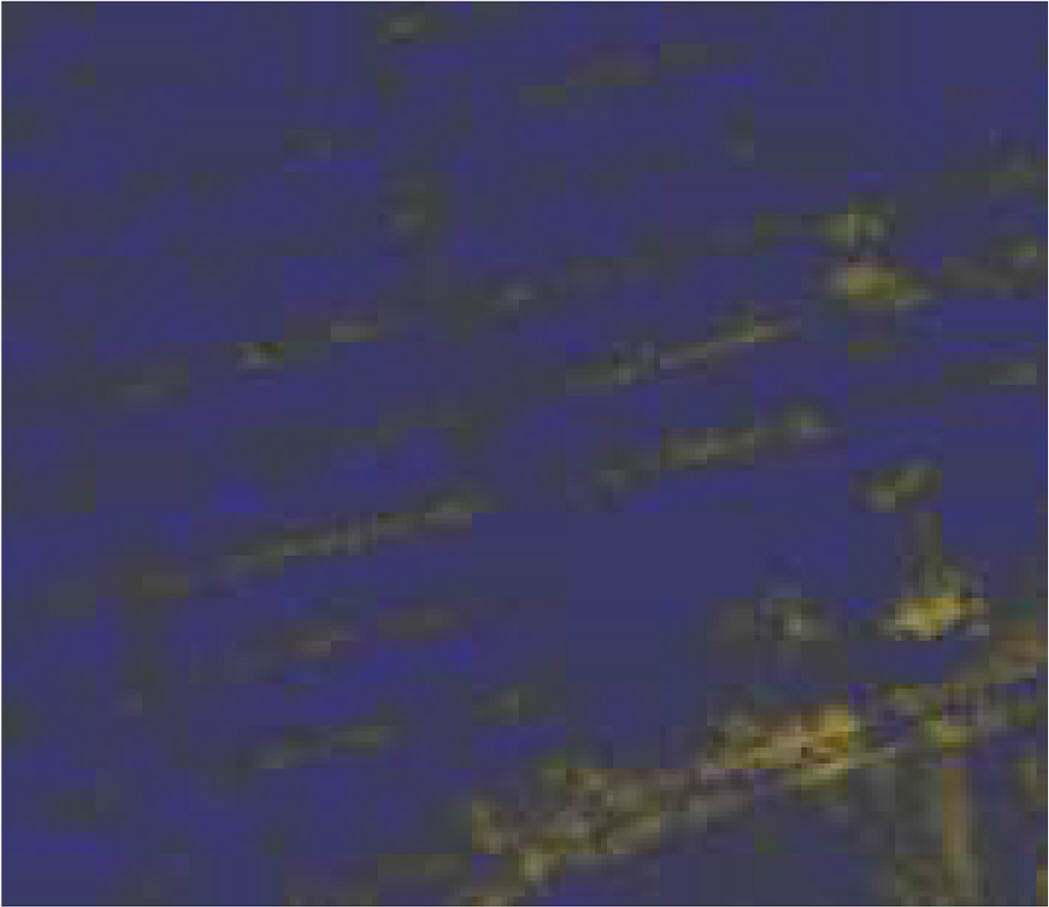
Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä ņäżņĀĢņŚÉ ļö░ļźĖ ļĀłņØ┤ļŹö ņśüņāüņØś Ēæ£ņŗ£ ņāüĒā£ļź╝ ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢśņŚ¼, ņŖżņ║Éļäł ņ£äņ╣śļĪ£ļČĆĒä░ ņĢĮ 500ļ»ĖĒä░ņÖĆ 700ļ»ĖĒä░ ņé¼ņØ┤ņØś ņ¦ĆņĀÉņØä ĒāÉņ¦Ć ļ¬®Ēæ£ ņ¦ĆņĀÉņ£╝ļĪ£ ņäżņĀĢĒĢśņśĆļŗż.
ņŗ£ĒŚśņŚÉļŖö 250nsņØś PL ņä▒ļŖźņØä Ļ░¢ļŖö Medium Pulseļź╝ ņé¼ņÜ®ĒĢśņśĆņ£╝ļ®░, Ļ▒░ļ”¼ļČäĒĢ┤ļŖźņŚÉ ņāüņØæĒĢśļŖö Ļ▒░ļ”¼ĒĢ┤ņāüļÅäņØĖ 125nsņÖĆ ņŗĀĒśĖņ▓śļ”¼ņןņ╣śņŚÉņä£ ņäżņĀĢ Ļ░ĆļŖźĒĢ£ ņĄ£ļīĆ ĒĢ┤ņāüļÅä Ļ░ÆņØĖ 25nsļź╝ ņŗ£ĒŚśņŚÉ ņé¼ņÜ®ĒĢśņśĆļŗż.
ĒāÉņ¦ĆļÉ£ ļĀłņØ┤ļŹö ņśüņāüņØä ĒÖĢļīĆĒĢśņŚ¼ ļ╣äĻĄÉĒĢ┤ ļ│┤ņĢśņØä ļĢī, ņĀäņåĪļÉśļŖö ņśüņāüļŹ░ņØ┤Ēä░ņØś ĒĢ┤ņāüļÅäĻ░Ć ļåÆņØäņłśļĪØ ļŹöņÜ▒ ņ×ÉņäĖĒĢśĻ▓ī ņśüņāüņØ┤ Ēæ£ņŗ£ļÉśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢĀ ņłś ņ׳ņŚłļŗż.
ņŗØ(3)Ļ│╝ ņŗØ(4)ļź╝ ĒåĄĒĢ┤ ņé░ņČ£ļÉ£ ņĄ£ņĀü Ļ▒░ļ”¼ĒĢ┤ņāüļÅä(125ns)ļź╝ ņé¼ņÜ®ĒĢ£ ļĀłņØ┤ļŹö ņśüņāüņŚÉņä£ļŖö ņŗØļ│äĒĢĀ ņłś ņŚåņŚłļŹś 30m Ļ░äĻ▓®ņØś ļ¼╝Ēæ£Ļ░Ć ņĄ£ļīĆ Ļ▒░ļ”¼ĒĢ┤ņāüļÅä(25ns)ņŚÉņä£ļŖö ļÜ£ļĀĘĒĢśĻ▓ī ĻĄ¼ļČäļÉśņŚłļŗż.
ņØ┤ Ļ▓░Ļ│╝ļĪ£ ļ»ĖļŻ©ņ¢┤ ļ│┤ņĢä, ļĀłņØ┤ļŹö ņŗĀĒśĖņ▓śļ”¼ņןņ╣śĻ░Ć ņ▓śļ”¼ Ļ░ĆļŖźĒĢ£ ņĄ£ļīĆ ĒĢ┤ņāüļÅäļĪ£ ņäżņĀĢĒĢ©ņ£╝ļĪ£ņŹ© ņŖżņ║ÉļäłņØś Ļ▒░ļ”¼ ļČäĒĢ┤ļŖźļ│┤ļŗż ļåÆņØĆ ĒĢ┤ņāüļÅäņØś ļŹ░ņØ┤Ēä░ļź╝ ņĀäļŗ¼ĒĢĀ ņłś ņ׳ņØīņØä ņĢī ņłś ņ׳ļŗż.
ļö░ļØ╝ņä£ ņ£ĀĒÜ©ĒĢ£ ņśüņāü ļŹ░ņØ┤Ēä░ņØś ņåīņŗżņØä ņŚåņĢĀĻĖ░ ņ£äĒĢ┤ņä£ļŖö ņŗĀĒśĖņ▓śļ”¼ņןņ╣śņØś ņä▒ļŖźņØ┤ ĒŚłņÜ®ĒĢśļŖö ņĄ£ļīĆ Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä Ļ░ÆņØä ņäżņĀĢĒĢ┤ņä£ ņé¼ņÜ®ĒĢ┤ņĢ╝ ĒĢ£ļŗż.
3.6 ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀü ĒĢ┤ņāüļÅäņØś Asterix Ēżļ¦Ę ĻĄ¼ņĪ░
ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀüņØś Asterix Ēżļ¦ĘņØś ĻĄ¼ņĪ░ļź╝ ņĀĢņØśĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ļ░®ņ£äĒĢ┤ņāüļÅäļŖö ņŗØ(1)Ļ│╝ ņŗØ(2)ņŚÉ ļö░ļź┤Ļ│Ā, Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļŖö ņŗĀĒśĖņ▓śļ”¼ņןņ╣śņØś ņä▒ļŖźņØ┤ ĒŚłņÜ®ĒĢśļŖö ņĄ£ļīōĻ░ÆņØä ņé¼ņÜ®ĒĢśļŖö Ļ▓āņØ┤ ņĄ£ņĀüņØ┤ļØ╝ ĒĢĀ ņłś ņ׳ļŗż.
ļ│Ė ņŗ£ĒŚśĒÖśĻ▓ĮņŚÉņä£ņØś ņĄ£ņĀü Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ļŖö Table 3Ļ│╝ Ļ░Öļŗż.
4. ļäżĒŖĖņøīĒü¼ ĻĖ░ļ░ś ņŗżņÜ®ņä▒ Ļ▓Ćņ”Ø
3ņןņŚÉņä£ Asterix Ēżļ¦Ę ņĀĢņØśļź╝ ņ£äĒĢ£ ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀü ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ ņ░ŠļŖö Ļ│ĄņŗØņØä ļÅäņČ£ĒĢśņśĆņ¦Ćļ¦ī, ņØ┤ļź╝ ņĀüņÜ®ĒĢ£ Asterix Ēżļ¦ĘņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ņĀäļŗ¼ĒĢśļŖö Ļ▓ĮņÜ░, ļĀłņØ┤ļŹöņØś ĒāÉņ¦Ć Ļ▒░ļ”¼Ļ░Ć ņ”ØĻ░ĆĒĢĀņłśļĪØ ņĀäļŗ¼ļÉśļŖö ņśüņāü ļŹ░ņØ┤Ēä░ņØś Ēü¼ĻĖ░Ļ░Ć ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ĒÖĢņØĖĒĢśņśĆļŗż.
ļö░ļØ╝ņä£ ļÅäņČ£ļÉ£ Ļ│ĄņŗØņØä ĒåĄĒĢ┤ ņĀĢņØśļÉ£ Asterix Ēżļ¦ĘņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļĀłņØ┤ļŹöņØś ĒāÉņ¦ĆĻ▒░ļ”¼ņŚÉ ļö░ļźĖ ņśüņāü ļŹ░ņØ┤Ēä░ņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä ņĖĪņĀĢĒĢśĻ│Ā, ņØ┤ ļ¼ĖņĀ£ņĀÉņØä ĒĢ┤Ļ▓░ĒĢĀ ņłś ņ׳ļŖö ļ░®ņĢłņØä ļ¬©ņāēĒĢśņśĆļŗż.
4.1 ĒāÉņ¦ĆĻ▒░ļ”¼ņŚÉ ļö░ļźĖ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ
3.6ņŚÉņä£ ņĀĢņØśĒĢ£ Asterix Ēżļ¦ĘņØä ņé¼ņÜ®ĒĢśņŚ¼, ņäĀļ░ĢņŚÉņä£ ĒĢŁĒĢ┤ ņŗ£ ņØ╝ļ░śņĀüņ£╝ļĪ£ ņé¼ņÜ®ĒĢśļŖö 3, 6, 12 NMņØś Range Set ņäżņĀĢņŚÉ ļö░ļźĖ Ļ░üĻ░üņØś ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░Ļ░Ć ņ░©ņ¦ĆĒĢśļŖö ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä ņĖĪņĀĢĒĢśņśĆļŗż.
ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ ņĖĪņĀĢ Ļ▓░Ļ│╝, 12 NM Range Setņ£╝ļĪ£ ņäżņĀĢļÉ£ 2Ļ░£ņØś ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░Ļ░Ć ņĀäņåĪļÉśļŖö Ļ▓ĮņÜ░ ņĢĮ 370 MbpsņØś ĒŖĖļלĒöĮņØä ņ░©ņ¦ĆĒĢśļŖö Ļ▓āņ£╝ļĪ£ ĒÖĢņØĖĒĢĀ ņłś ņ׳ļŗż.
ņØ┤ļŖö ĒĢŁĒĢ┤ ņןļ╣ä ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØś ņĄ£ļīĆ ĒŚłņÜ®ņ╣śņØĖ 1 Gbps(IEC, 2018)ņØś ņĢĮ 36%ļź╝ ņ░©ņ¦ĆĒĢśļŖö Ļ▓āņ£╝ļĪ£ņä£, ņĢĮ 20ņŚ¼ Ļ░£ņØś ĒĢŁĒĢ┤ ņןļ╣äļōżņØ┤ ņŚ░Ļ▓░ Ļ░ĆļŖźĒĢ£ ļäżĒŖĖņøīĒü¼ ĒÖśĻ▓ĮņŚÉņä£ ņØ┤ ņłśņ╣śļŖö Ļ│╝ļÅäĒĢśĻ▓ī ļåÆņØĆ Ļ░ÆņØ┤ļØ╝Ļ│Ā ĒĢĀ ņłś ņ׳ļŗż.
4.2 ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ Ļ░Éņåī ļ░®ņĢł
ĒĢŁĒĢ┤ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØś Ļ│╝ļČĆĒĢśņŚÉ ļö░ļźĖ ĒĢŁĒĢ┤ ņןļ╣äņØś ņŚ░ļÅÖ Ļ┤ĆļĀ© ņśżņ×æļÅÖ Ļ░ĆļŖźņä▒ņØä Ļ│ĀļĀżĒĢśņśĆņØä ļĢī, ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░Ļ░Ć ņ░©ņ¦ĆĒĢśļŖö ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä Ļ░Éņåīņŗ£ņ╝£ņĢ╝ ĒĢĀ ĒĢäņÜöņä▒ņØä ņØĖņ¦ĆĒĢśĻ│Ā ĻĘĖ ļ░®ņĢłņØä ļ¬©ņāēĒĢśņśĆļŗż.
ĻĘĖ Ļ▓░Ļ│╝, ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀü ĒĢ┤ņāüļÅäņØś ļŹ░ņØ┤Ēä░Ļ░Ć ņĀäņŗ£ĻĖ░ ņĖĪņŚÉ ņ×ģļĀźļÉśļŹöļØ╝ļÅä ņĀäņŗ£ĻĖ░ņØś ĒŖ╣ņä▒ņŚÉ ļö░ļØ╝ ļ¬©ļōĀ ļŹ░ņØ┤Ēä░Ļ░Ć ĒÖöļ®┤ņŚÉ Ēæ£ĒśäĒĢśņ¦Ć ļ¬╗ĒĢĀ Ļ▓āņØ┤ļØ╝ļŖö Ļ░ĆņäżņØ┤ ļÅäņČ£ļÉśņŚłņ£╝ļ®░, ļ│Ė Ļ░ĆņäżņØä ņ×ģņ”ØĒĢśĻĖ░ ņ£äĒĢ┤ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀü ĒĢ┤ņāüļÅäļź╝ ņé░ņČ£ĒĢśņŚ¼ ļé«ņØĆ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņ£╝ļĪ£ ņ£ĀĒÜ©ĒĢ£ ņĀĢļ│┤ļź╝ ņĀäņåĪĒĢśļŖö ļ░®ņĢłņØä ņŚ░ĻĄ¼ĒĢśņśĆļŗż.
5. ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ ņĄ£ņĀüĒĢ┤ņāüļÅä
Asterix Ēżļ¦Ęņ£╝ļĪ£ ņĀäļŗ¼ļÉ£ ļĀłņØ┤ļŹö ņśüņāüļŹ░ņØ┤Ēä░ļŖö ņĀäņŗ£ĻĖ░ņŚÉ Ēæ£ņŗ£ļÉśļŖö Ļ│╝ņĀĢņŚÉņä£ ĒÖöļ®┤ ĒĢ┤ņāüļÅäņØś ņśüĒ¢źņØä ļ░øļŖöļŗż. ļö░ļØ╝ņä£ ņĀäņŗ£ĻĖ░ņØś ĒÖöļ®┤ ĒĢ┤ņāüļÅäņÖĆ ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░ņØś ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäņÖĆņØś Ļ┤ĆĻ│äļź╝ ļÅäņČ£ĒĢśĻ│Ā ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ Asterix Ēżļ¦ĘņØä ņāłļĪŁĻ▓ī ņĀĢņØśĒĢśņśĆļŗż.
5.1 ĒÖöļ®┤ ĒĢ┤ņāüļÅäņŚÉ ļö░ļźĖ Ļ▒░ļ”¼ ĒĢ┤ņāüļÅä Ļ│äņé░
ļĀłņØ┤ļŹö ņĀäņŗ£ĻĖ░ņØś ĒĢ┤ņāüļÅäļź╝ RESļØ╝Ļ│Ā ĒĢĀ ļĢī, ņäżņĀĢĒĢ£ RANGE SCALE(ņØ┤ĒĢś RNG)ņŚÉ ļö░ļźĖ ĒöĮņģĆļ│ä Ļ▒░ļ”¼ D(m)ņØĆ ņŗØ(5)ņÖĆ Ļ░ÖĻ│Ā, ĒöĮņģĆļ│ä ļ░śņé¼ĒīīņØś ņĀäļŗ¼ ņŗ£Ļ░ä D(ns)ļŖö ņŗØ(6)Ļ│╝ Ļ░ÖņØ┤ Ēæ£ĒśäĒĢĀ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£,
c : speed of propagation(2,999,792,458 m/s)
ĒĢśņ¦Ćļ¦ī ņ×ģļĀźļÉ£ ļ░śņé¼Ēīīļź╝ ņ▓śļ”¼ĒĢśļŖö ņŗĀĒśĖ ņ▓śļ”¼ņןņ╣śņØś ņä▒ļŖźņŚÉ ĒĢ£Ļ│äĻ░Ć ņ׳ņ£╝ļ»ĆļĪ£, Asterix Ēżļ¦ĘņØś Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļŖö ņŗĀĒśĖ ņ▓śļ”¼ņןņ╣śņŚÉņä£ ņäżņĀĢ Ļ░ĆļŖźĒĢ£ ņĄ£ļīĆ Ļ▒░ļ”¼ĒĢ┤ņāüļÅäņÖĆ ņŗØ(5)ņÖĆ ņŗØ(6)ņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ņé░ņČ£ļÉ£ ĒŖ╣ņĀĢ RANGE SCALEņŚÉ ļīĆĒĢ£ Ļ▒░ļ”¼ĒĢ┤ņāüļÅä Ļ░Æ ņżæ ļŹö Ēü░ Ļ░Æņ£╝ļĪ£ ņäżņĀĢĒĢśļŖö Ļ▓āņØ┤ ņĀüņĀłĒĢśļŗż.
ĻĘĖļ¤¼ļ»ĆļĪ£ DSPNOR ņŗĀĒśĖņ▓śļ”¼ļČĆļź╝ ĒÖ£ņÜ®ĒĢ£ ņŗ£ĒŚś ĒÖśĻ▓ĮņØä ĻĖ░ņżĆņ£╝ļĪ£, ņŗ£ĒŚśņÜ® ļööņŖżĒöīļĀłņØ┤ ĻĖ░ņżĆ ĒĢ┤ņāüļÅä(1080)ņŚÉ ļö░ļźĖ RANGE SCALE ļ│ä ņĄ£ņĀü Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļŖö Table 5ņÖĆ Ļ░ÖļŗżĻ│Ā ļ│╝ ņłś ņ׳ļŗż.
5.2 ĒÖöļ®┤ ĒĢ┤ņāüļÅäņŚÉ ļö░ļźĖ ļ░®ņ£ä ĒĢ┤ņāüļÅä Ļ│äņé░
ļĀłņØ┤ļŹö ņĀäņŗ£ĻĖ░ņØś ĒĢ┤ņāüļÅäļź╝ RESļØ╝Ļ│Ā ĒĢĀ ļĢī, ļĀłņØ┤ļŹö ņśüņāüņØ┤ ņłśņŗĀļÉ£ ļ░®ņ£äņØś Ļ░üļÅä ╬ĖņŚÉņä£ ņĄ£ļīĆ Ļ▒░ļ”¼ņŚÉ ņ׳ļŖö ņ¦ĆņĀÉņØś ņóīĒæ£ xļŖö ņŗØ(7), yļŖö ņŗØ(8)Ļ│╝ Ļ░Öļŗż.
ņŚ¼ĻĖ░ņä£,
RES : ņĀäņŗ£ĻĖ░ņØś ĒĢ┤ņāüļÅä
ņØ┤ļĢī, x ņóīĒæ£ņØś ļ│ĆĒÖöļ¤ēņØĆ ĒāÉņ¦Ć ļ░®ņ£äĻ░Ć 0ļÅä ļśÉļŖö 180ļÅä ņØ╝ ļĢī Ļ░Ćņן Ēü¼Ļ│Ā, y ņóīĒæ£ņØś ļ│ĆĒÖöļ¤ēņØĆ ĒāÉņ¦Ć ļ░®ņ£äĻ░Ć 90ļÅä ļśÉļŖö 270ļÅä ņØ╝ ļĢī Ļ░Ćņן Ēü¼ļŗż. ĻĘĖļ”¼Ļ│Ā ņóīĒæ£ņØś ļ│ĆĒÖöļ¤ēņØ┤ ņĄ£ļīĆņØĖ ņ¦ĆņĀÉņŚÉņä£ ļ░®ņ£äĻ░ü ļŗ©ņ£äņØś ļ│ĆĒÖöņŚÉ ļö░ļźĖ ņóīĒæ£ļ│ĆĒÖöĻ░Ć 1ĒöĮņģĆ ņØ┤ĒĢśņØ┤ņ¢┤ņĢ╝, ļ░®ņ£ä ļ│ĆĒÖöņŚÉ ļö░ļźĖ ļ¬©ļōĀ ņ£ĀĒÜ©ĒĢ£ ļŹ░ņØ┤Ēä░ļź╝ Ēæ£Ēśä Ļ░ĆļŖźĒĢśļŗżĻ│Ā ĒĢĀ ņłś ņ׳ļŗż.
ĻĘĖļ¤¼ļ»ĆļĪ£ ņĄ£ļīĆ ļŗ©ņ£ä ļ░®ņ£äĻ░ü Tļź╝ ļÅäņČ£ĒĢśļŖö ļ░®ļ▓ĢņØä ņłśņŗØņ£╝ļĪ£ Ēæ£ĒśäĒĢśļ®┤ ņŗØ(9)Ļ│╝ ņŗØ(10)ņÖĆ Ļ░ÖņØ┤ ļÅäņČ£ļÉ£ļŗż.
ļö░ļØ╝ņä£ ņŗ£ĒŚśņÜ® ļööņŖżĒöīļĀłņØ┤ ĻĖ░ņżĆ ĒĢ┤ņāüļÅä(1080)ņŚÉ ļö░ļźĖ Asterix Ēżļ¦ĘņØś ņĄ£ņĀü ļ░®ņ£äĒĢ┤ņāüļÅäļŖö 0.106ļÅä ņ×äņØä ņĢī ņłś ņ׳ļŗż.
6. ņĄ£ņóģ Ļ▓░Ļ│╝ ļ╣äĻĄÉ
5.3ņŚÉņä£ ņĀĢņØśĒĢ£ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ņÖĆ 3.6ņŚÉņä£ ņĀĢņØśĒĢ£ ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ļź╝ Ļ░üĻ░ü ĒÖ£ņÜ®ĒĢśņŚ¼, ĒŖ╣ņĀĢ Range SetņŚÉņä£ņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ ļ░Å ņśüņāü Ēæ£ņŗ£ ņāüĒā£ļź╝ ļ╣äĻĄÉĒĢśņśĆļŗż.
6.1 Range Set ļ│ä ņĀäņŗ£ĻĖ░ ĒÖöļ®┤ ļ╣äĻĄÉ
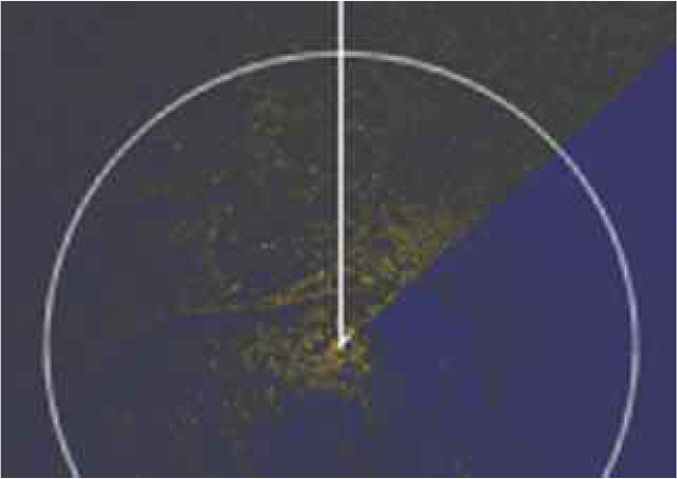
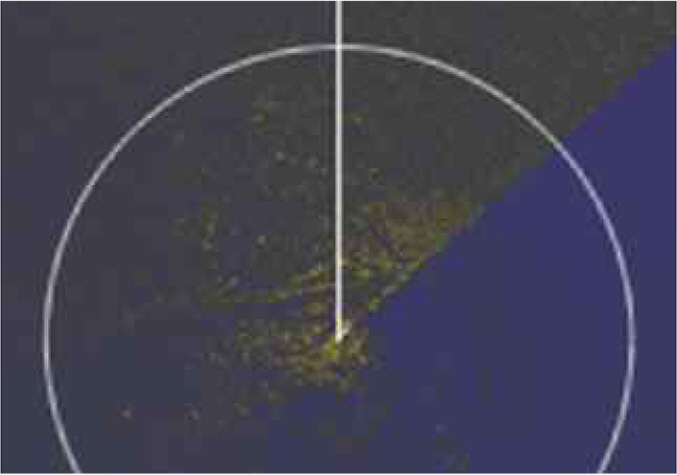
ņŗ£ĒŚśĒÖśĻ▓ĮņŚÉņä£ļŖö ņŗØ(10)ņØä ĒåĄĒĢ┤ ņé░ņČ£ļÉ£ ļ░®ņ£äĒĢ┤ņāüļÅä 0.106ņØä ņäżņĀĢĒĢĀ ņłś ņŚåņ¢┤ ņĄ£ļīĆ ļ░®ņ£äĒĢ┤ņāüļÅä 0.095ļź╝ ņĀüņÜ®ĒĢśņśĆņ£╝ļ®░, Ļ▒░ļ”¼ĒĢ┤ņāüļÅäņØś ņ░©ņØ┤ņŚÉ ļö░ļźĖ ĒÖöļ®┤ ļ╣äĻĄÉļź╝ ņ£äĒĢ┤ 3NM ņØ┤ņāüņØś Range Scale(3 NM ļ░Å 6 NM)ņŚÉņä£ ņŗ£ĒŚśņØä ņ¦äĒ¢ēĒĢśņśĆļŗż.
Ļ░ü Range ScaleņŚÉ ņĀüĒĢ®ĒĢ£ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ņÖĆ ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ļź╝ ĒÖ£ņÜ®ĒĢśņŚ¼ ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ Ļ░üĻ░ü ņĀäņåĪĒĢśņśĆĻ│Ā, ņĀäņŗ£ĻĖ░ņŚÉņä£ ņłśņŗĀ ļ░Å Ēæ£ņŗ£ļÉśļŖö ļĀłņØ┤ļŹö ņśüņāü ĒÖöļ®┤ņØś ņ£Āņé¼ņä▒ņØä ņ£ĪņĢł ļ░Å ņśüņāü ļ╣äĻĄÉ ĒöäļĪ£ĻĘĖļשņ£╝ļĪ£ ņĖĪņĀĢĒĢśņśĆļŗż.
ļæÉ Ļ░Ćņ¦Ć ļ░®ņŗØņ£╝ļĪ£ ņĀäņåĪļÉśļŖö ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░Ļ░Ć ņĀäņŗ£ĻĖ░ņŚÉ Ļ░üĻ░ü Ēæ£ņŗ£ļÉĀ ļĢī, ļæÉ ņśüņāüņØś ņ░©ņØ┤ņĀÉņØä ņ£ĪņĢłņ£╝ļĪ£ļŖö Ļ▒░ņØś ņŗØļ│ä ĒĢĀ ņłś ņŚåņŚłļŗż.
ļæÉ ņśüņāüņØś ņ░©ņØ┤ļź╝ ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢ┤ ļ»ĖĻĄŁņØś WebMinds ņé¼ņŚÉņä£ Ļ░£ļ░£ĒĢ£ ŌĆ£DUPLICATE PHOTO CLEANERŌĆØļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ļæÉ ņśüņāüņØś ņ£Āņé¼ļÅäļź╝ ņĖĪņĀĢĒĢśņśĆļŗż.
ņĖĪņĀĢ Ļ▓░Ļ│╝ Range Set 3 NMņŚÉ ļīĆĒĢśņŚ¼ ļæÉ ņśüņāüņØĆ 88%ņØś ņ£Āņé¼ļÅäļĪ£ ņĖĪņĀĢļÉśņŚłĻ│Ā, 6 NMņŚÉ ļīĆĒĢśņŚ¼ 86%ņØś ņ£Āņé¼ļÅäļĪ£ ņĖĪņĀĢļÉśņŚłļŗż.
6.2 Range Set ļ│ä ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ ļ╣äĻĄÉ
ļŗżņØīņ£╝ļĪ£ļŖö Ļ░üĻ░üņØś Asterix Ēżļ¦Ęņ£╝ļĪ£ ņĀäņåĪļÉśļŖö ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░Ļ░Ć ņ░©ņ¦ĆĒĢśļŖö ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØś Ēü¼ĻĖ░ļź╝ ņĖĪņĀĢĒĢśĻ│Ā ļ╣äĻĄÉĒĢśņśĆļŗż. ļ│Ė ņĖĪņĀĢņØĆ Range Set 3, 6 ļ░Å 12 NMņŚÉņä£ ņØ┤ļŻ©ņ¢┤ ņĪīņ£╝ļ®░, ĻĘĖ Ļ▓░Ļ│╝ļŖö Table 10Ļ│╝ Ļ░Öļŗż.
Range Set 3 NMņŚÉ ļīĆĒĢ┤ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØĆ 39.3 MbpsļĪ£ ņĖĪņĀĢļÉśņŚłņ£╝ļ®░, ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ 46.6 MbpsņŚÉ ļ╣äĒĢ┤ 16% Ļ░ÉņåīļÉ£ Ļ▓āņØ┤ ĒÖĢņØĖļÉśņŚłļŗż.
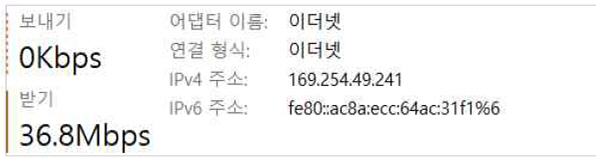
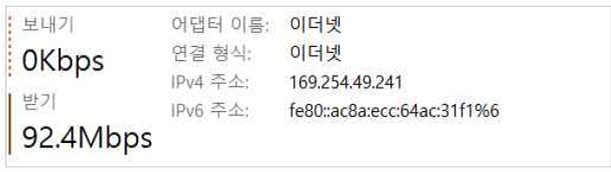
Range Set 6 NMņŚÉ ļīĆĒĢ┤ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØĆ 36.8 MbpsļĪ£ ņĖĪņĀĢļÉśņŚłņ£╝ļ®░, ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ 92.4 MbpsņŚÉ ļ╣äĒĢ┤ 60% Ļ░ÉņåīļÉ£ Ļ▓āņØ┤ ĒÖĢņØĖļÉśņŚłļŗż.
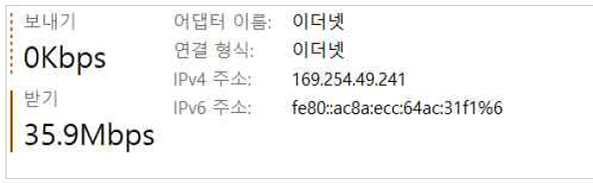
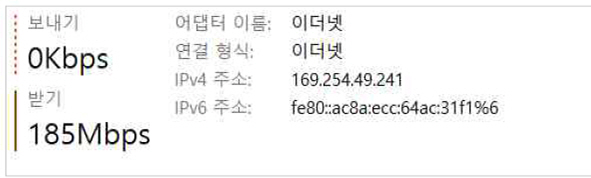
Range Set 12 NMņŚÉ ļīĆĒĢ┤ ņĀäņŗ£ĻĖ░ ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØĆ 35.9 MbpsļĪ£ ņĖĪņĀĢļÉśņŚłņ£╝ļ®░, ņŖżņ║Éļäł ĒŖ╣ņä▒ņŚÉ ļö░ļźĖ Ēżļ¦ĘņØś ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ 185 MbpsņŚÉ ļ╣äĒĢ┤ 81% Ļ░ÉņåīļÉ£ Ļ▓āņØ┤ ĒÖĢņØĖļÉśņŚłļŗż.
ļ│Ė ņŚ░ĻĄ¼ļź╝ ĒåĄĒĢ┤ ļÅäņČ£ļÉ£ ņĀäņŗ£ĻĖ░ņØś ĒŖ╣ņä▒ņØä Ļ│ĀļĀżĒĢ£ ņĄ£ņĀü ĒĢ┤ņāüļÅäņØś Asterix Ēżļ¦Ę ĻĄ¼ņĪ░ļź╝ ņé¼ņÜ®ĒĢĀ Ļ▓ĮņÜ░, ĒĢŁĒĢ┤ļäżĒŖĖņøīĒü¼ņØś ņĄ£ļīĆ ĒŚłņÜ® ĒŖĖļלĒöĮņØś 4% ņĀĢļÅäļ¦īņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ļĀłņØ┤ļŹöņØś ĒāÉņ¦Ć Ļ▒░ļ”¼ņÖĆ ļ¼┤Ļ┤ĆĒĢśĻ▓ī ņ£ĀĒÜ©ĒĢ£ ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ņĀäņåĪĒĢĀ ņłś ņ׳ņØīņØä ĒÖĢņØĖĒĢśņśĆļŗż.
7. Ļ▓░ ļĪĀ
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ļĀłņØ┤ļŹö ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ļööņ¦ĆĒäĖ ļ░®ņŗØņ£╝ļĪ£ ņĀäļŗ¼ĒĢśĻĖ░ ņ£äĒĢ┤, ņĄ£ĻĘ╝ ņäĀļ░ĢņŚÉņä£ ņŻ╝ļĪ£ ĒÖ£ņÜ®ļÉśļŖö Asterix CAT 240 Ēżļ¦ĘņØś ņĄ£ņĀüĒÖö ļ░®ņĢłņŚÉ Ļ┤ĆĒĢ£ ļé┤ņÜ®ņØä ļŗżļŻ©ņŚłļŗż.
Asterix Ēżļ¦ĘņØĆ ņé¼ņÜ®ņ×ÉņŚÉ ņØśĒĢ┤ ņĀĢņØś Ļ░ĆļŖźĒĢ£ ņ£ĀļÅÖņĀüņØĖ ĻĄ¼ņĪ░ļź╝ Ļ░Ćņ¦ĆĻ│Ā ņ׳ņ¢┤, ņäĀļ░Ģ ļĀłņØ┤ļŹö ņÜ┤ņÜ®ņŚÉ ņĀüĒĢ®ĒĢśņ¦Ć ņĢŖĻ▓ī ņĀĢņØśļÉ£ Ēżļ¦Ę ĻĄ¼ņĪ░ļŖö ĒĢŁĒĢ┤ ņןļ╣ä ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņØä Ļ│╝ļÅäĒĢśĻ▓ī ņ”ØĻ░Ćņŗ£ĒéżĻ▒░ļéś ņĢłņĀĢņä▒ņØä Ļ░Éņåīņŗ£Ēé¼ ņłś ņ׳ļŗż.
ņØ┤ņŚÉ ņäĀļ░Ģ ļĀłņØ┤ļŹöņØś ņä▒ļŖźņØä ņĄ£ļīĆĒĢ£ņ£╝ļĪ£ ĒÖ£ņÜ®ĒĢĀ ņłś ņ׳ļÅäļĪØ ņŖżņ║ÉļäłņØś ņä▒ļŖźņØä ĻĖ░ļ░śņ£╝ļĪ£ ņĄ£ņĀüĒÖöļÉ£ ļ░®ņ£ä/Ļ▒░ļ”¼ ĒĢ┤ņāüļÅäļź╝ Ļ│äņé░ĒĢśļŖö ļ░®ļ▓ĢņØä ļÅäņČ£ĒĢśĻ│Ā, ņØ┤ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ Asterix Ēżļ¦ĘņØä ņĀĢņØśĒĢśņŚ¼ ņäĀļ░ĢņÜ® Asterix Ēżļ¦ĘņØś ņĄ£ņĀüĒÖöļź╝ ņŗ£ļÅäĒĢśņśĆļŗż.
ņØ┤ Ļ│╝ņĀĢņŚÉņä£ ļĀłņØ┤ļŹö ĒāÉņ¦Ć Ļ▒░ļ”¼ ņ”ØĻ░ĆņŚÉ ļö░ļźĖ Ļ│╝ļÅäĒĢ£ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮ ņ”ØĻ░Ć ļ¼ĖņĀ£ļź╝ ļ░£Ļ▓¼ĒĢśņśĆĻ│Ā, ņĀäņŗ£ĻĖ░ ņä▒ļŖźņØä ĻĖ░ļ░śņ£╝ļĪ£ Asterix Ēżļ¦ĘņØä ņĄ£ņĀüĒÖöĒĢśļŖö ļ░®ļ▓ĢņØä ņČöĻ░ĆļĪ£ ņŚ░ĻĄ¼ĒĢśņśĆļŗż.
ĻĘĖ Ļ▓░Ļ│╝, ļĀłņØ┤ļŹöņØś ņ£ĀĒÜ©ĒĢ£ ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ĒāÉņ¦Ć Ļ▒░ļ”¼ņÖĆ ļ¼┤Ļ┤ĆĒĢśĻ▓ī ĻĘĀņØ╝ĒĢ£ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņ£╝ļĪ£ ņĢłņĀĢņĀüņØ┤Ļ▓ī ņĀäļŗ¼ĒĢĀ ņłś ņ׳ļŖö Asterix Ēżļ¦Ę ņĀĢņØś ļ░®ļ▓ĢņØä ņ░ŠņØä ņłś ņ׳ņŚłļŗż.
ņØ┤ļ¤¼ĒĢ£ ļ░®ļ▓ĢņØä ņĀüņÜ®ĒĢ£ļŗżļ®┤, ņäĀļ░ĢņØś ļĀłņØ┤ļŹö ņŖżņ║ÉļäłņŚÉņä£ ĒāÉņ¦ĆļÉ£ ņśüņāüņØä ļŗżļźĖ ĒĢŁĒĢ┤ ņןļ╣äļōżĻ│╝ Ļ│Ąņ£ĀĒĢ©ņŚÉ ņ׳ņ¢┤, Ļ│╝ļÅäĒĢ£ ļäżĒŖĖņøīĒü¼ ĒŖĖļלĒöĮņ£╝ļĪ£ ņØĖĒĢ£ ņŚ░ļÅÖ ļ¼ĖņĀ£ ļ░£ņāØ Ļ░ĆļŖźņä▒ņØä ņĄ£ņåīĒÖöĒĢ£ ņāüĒā£ņŚÉņä£ ņĄ£ņĀüņØś ņśüņāü ļŹ░ņØ┤Ēä░ļź╝ ĒÖĢņØĖĒĢĀ ņłś ņ׳ņØä Ļ▓āņØ┤ļŗż.
Ē¢źĒøäņŚÉļŖö ĒĢ┤ņāüņŚÉ ņäżņ╣śļÉ£ ļĀłņØ┤ļŹöļź╝ ĒÖ£ņÜ®ĒĢśņŚ¼ ļ│Ė ņŚ░ĻĄ¼ Ļ▓░Ļ│╝ļź╝ ņČöĻ░ĆļĪ£ Ļ▓Ćņ”ØĒĢĀ ņłś ņ׳ļŖö ņŚ░ĻĄ¼ņÖĆ ļŹöļČłņ¢┤, ņĢłņĀĢņĀüņØĖ ĒĢŁĒĢ┤ ļäżĒŖĖņøīĒü¼ ĻĄ¼ņä▒ņØä ņ£äĒĢ┤ ĒĢŁĒĢ┤ņÜ® ļĀłņØ┤ļŹöļź╝ ņ£äĒĢ£ Asterix Ēżļ¦ĘņØä ļ│äļÅäļĪ£ ņĀĢņØśĒĢśĻ│Ā Ēæ£ņżĆĒÖöĒĢśļŖö ņŚ░ĻĄ¼Ļ░Ć ĒĢäņÜöĒĢĀ Ļ▓āņ£╝ļĪ£ ĒīÉļŗ©ļÉ£ļŗż.









 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






