


1. 서 론
해상풍력단지 개발 시 최근 많이 수행하고 있는 부유식 라이다를 통한 관측은 기상탑 또는 고정식 라이다와 비교하면 여러모로 유리하다. 부이를 설치하는 데 필요한 시간과 비용은 고정식 시설물에 비하면 상당히 적은 편이다. 더군다나 관측 기간이 끝나고 나면 철거하기도 쉽고 복구 후 환경적 영향도 적기 때문에 지역사회의 반발도 줄일 수 있다는 이점이 있다.
그러나 현재까지도 우리나라는 해당 장비 및 관측기술에 대하여 해외 의존도가 높은 실정이다. 지난 몇 세기 동안 에너지소비량은 폭발적으로 증가하였고, 이에 따른 기후변화와 예측 불가한 환경변화가 수반되고 있어 최근에는 친환경 에너지 생산과 소비에 관심이 어느 때보다 높다. 한국은 국토 면적 대비 인구밀도가 높아 육상에서 풍력단지를 개발할 공간이 절대적으로 부족하며 해상으로의 진출이 불가피하다. 하지만 아직 해상풍력과 관련된 국내 기술과 경험이 부족하여 외산 자본과 기술을 주축으로 단지가 개발되고 있다. 개발과정에 필수적인 풍황 관측도 마찬가지인데, 국내 기술력도 축적하고 외화 유출을 줄이기 위해서는 부유식 라이다에 대한 국산화가 필요한 시점이라 할 수 있다.
한국의 서해안은 넓은 범위에서 낮은 수심 해역이 분포해 있어, 경제적인 풍력발전 단지 조성이 가능하다. 다만 수심이 얕고 조석 차가 크므로 지역에 따라 강한 조류가 반복적으로 나타난다. 이러한 환경조건은 부유식 라이다 운영 시 많은 영향을 끼친다.
라이다 부이는 지정된 기간 동안 안정적인 풍황자료 수집이 중요하며, 수집을 위해서는 부이가 계류 위치에서 이탈하지 않아야 하는 게 필수적인 조건이다. 서해안에서의 부유식 라이다 부이의 안정적인 풍황자원 계측을 위해 해상설치 전, OrcaFlex 해석 도구를 이용하여 동적 운동 분석 및 계류해석을 시행하였다.
2. 부유식 라이다 부이의 동적해석 및 계류해석
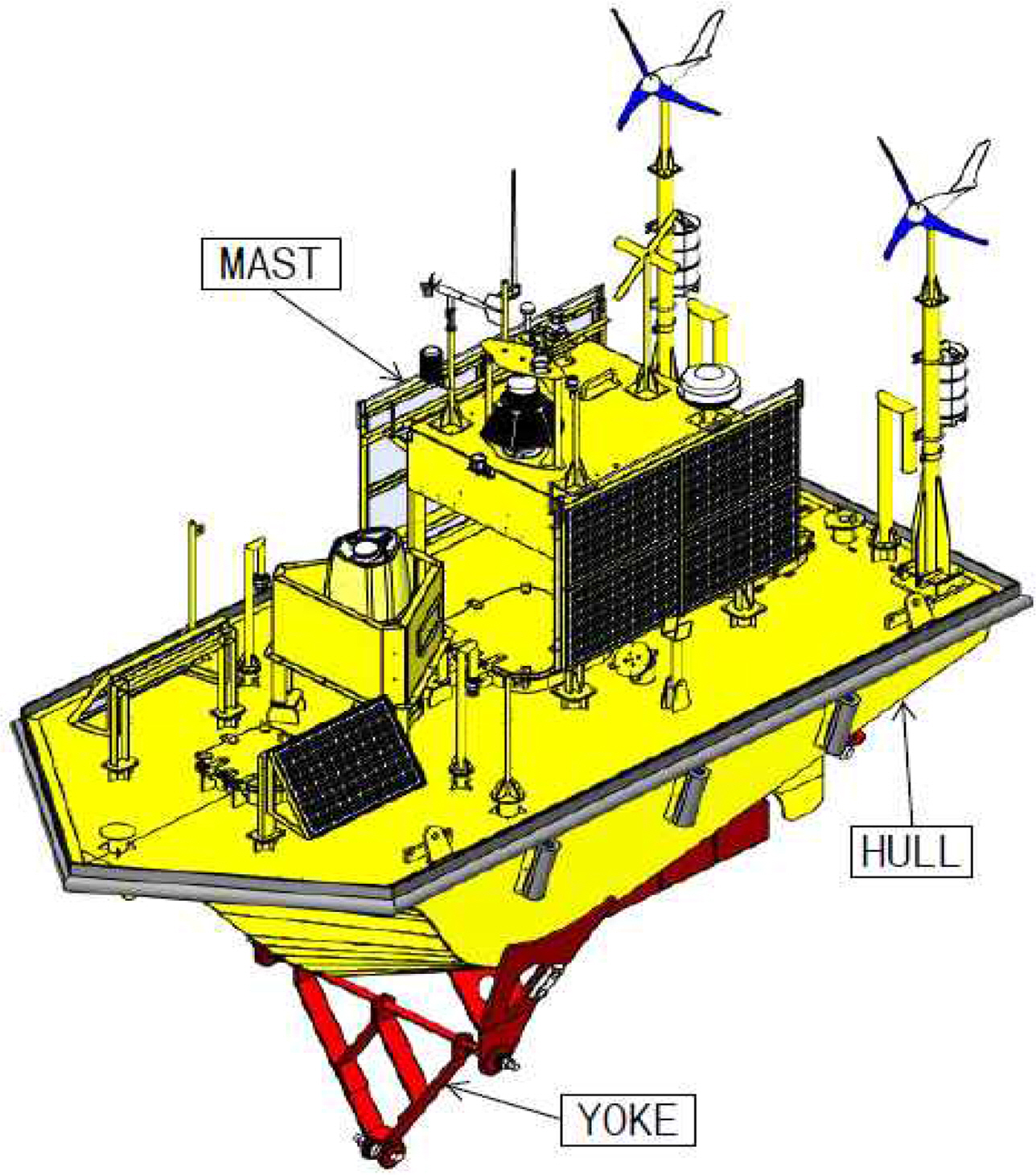
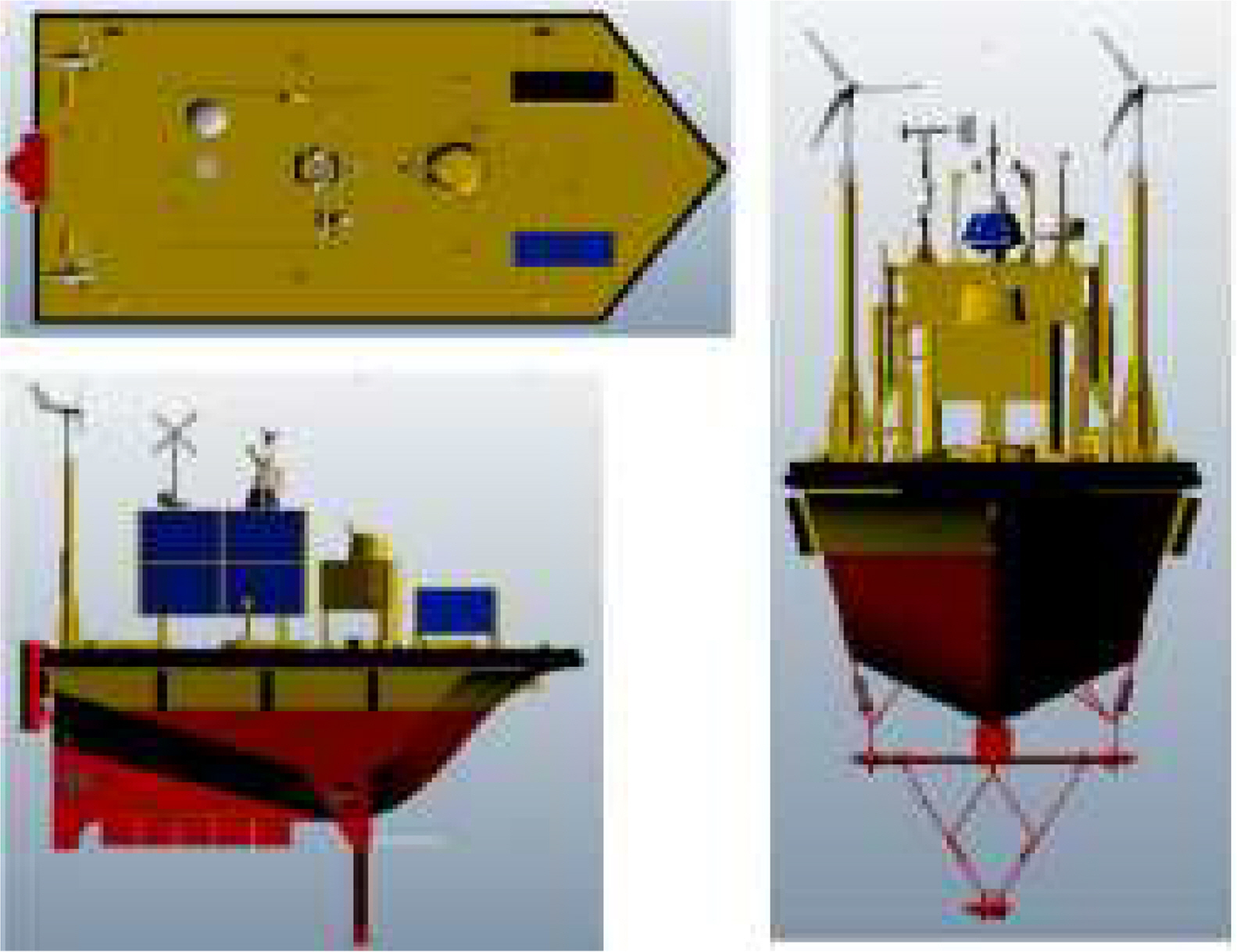
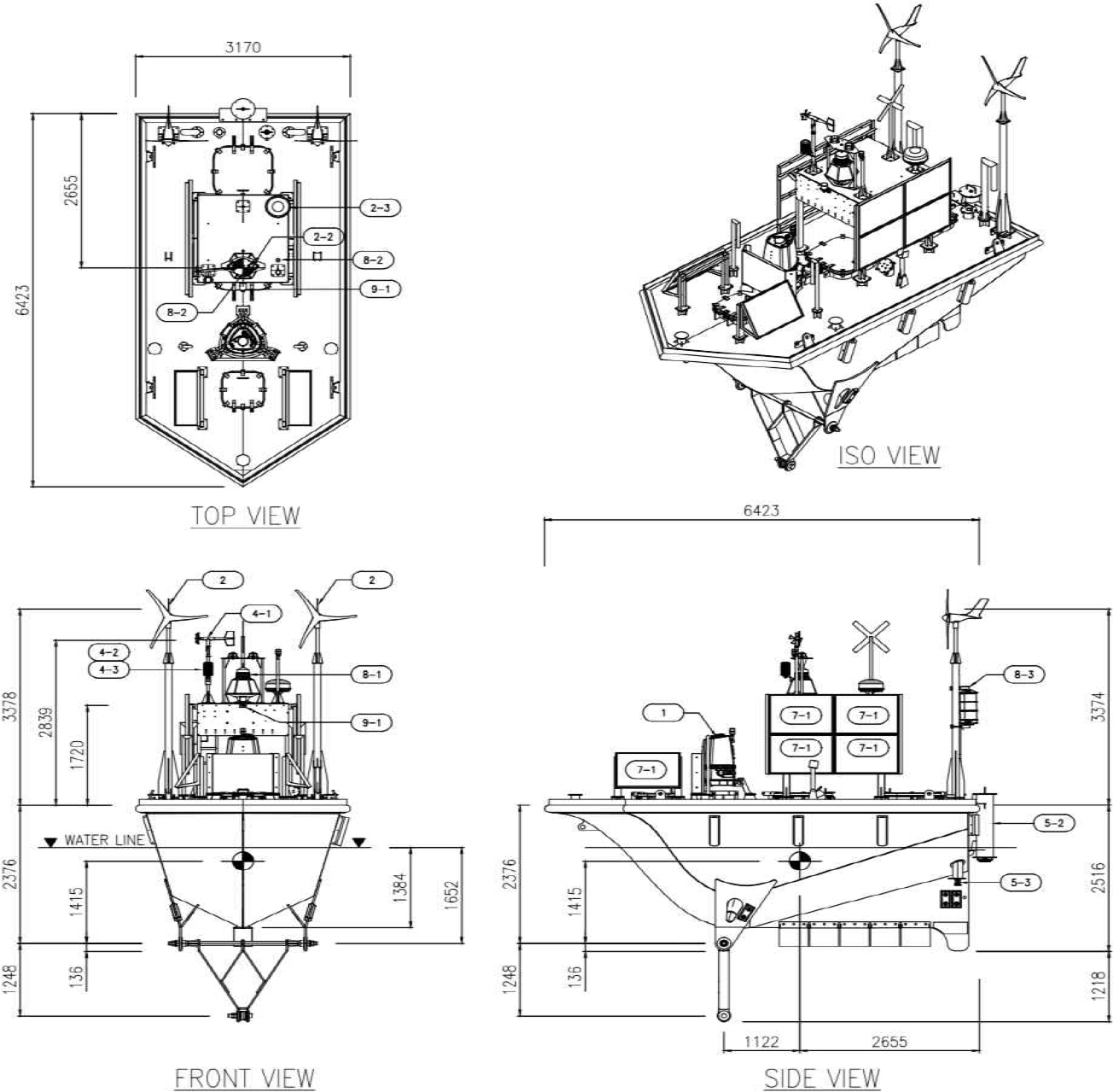
2.1 6m 선박형 라이다 부이의 특성
2.2 6m 선박형 라이다 부이의 계류 시스템
2.2.1 기상관측 부이의 계류방식
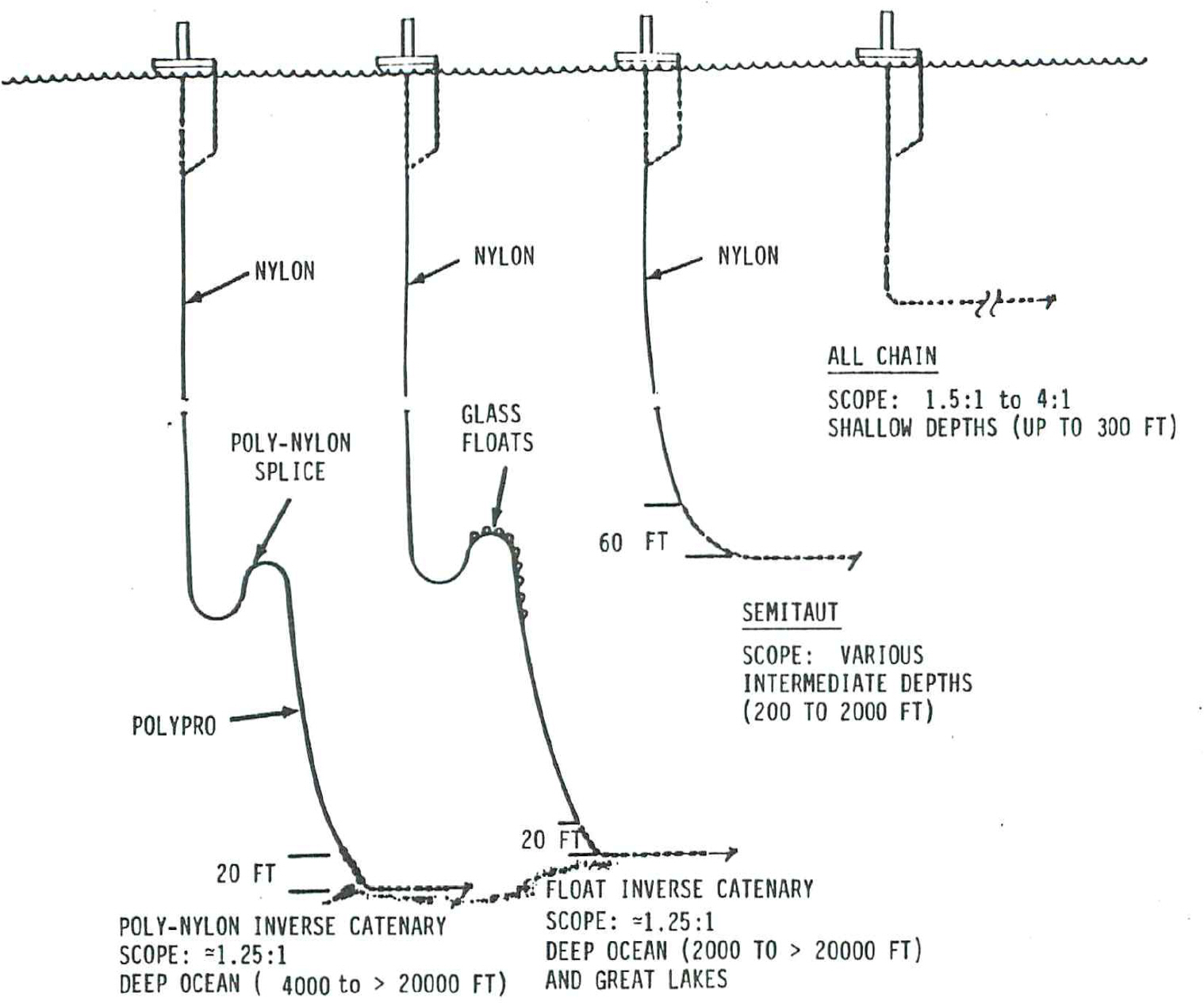
미대기해양기상청(NOAA) 산하의 데이터부이센터(NDBC)에서는 다양한 형식의 계류설계 표준안과 계류설계 매뉴얼을 개발하였다. 앞서 언급한 매뉴얼에 따르면 Fig. 3의 도해와 같이 계류하는 해역의 수심에 따라 계류라인 방식은 크게 달라지며, 천해(90m 이내), 중간 수심(600m 이내), 대 수심(600m 이상 6,000m 이내)용 계류 시스템으로 분류할 수 있다.
1) All-chain 계류방식은 가장 오래된 방식 중 하나이며 가장 단순한 접근법이다. 적용 가능한 수심은 약 90m까지이며 비교적 얕은 수심에서 이용하는 계류방식이다. 전체가 체인으로 구성되어 있으므로 가장 높은 강도를 가질 수 있지만 우려되는 부분은 체인이 부이에 가하는 하중이다.
2) Semitaut 계류방식은 체인과 나일론 로프의 조합으로 이루어져 있다. All-chain 방식을 중간 수심에서 이용하기엔 부이에 가중되는 하중이 너무 커서 부이의 부력을 초과할 수 있다. 따라서 60m∼600m 사이의 수심에서는 Semitaut 계류방식을 주로 이용한다. 부이에 연결되는 상부 체인과 앵커와 연결되는 하부 체인 사이에 적정길이의 나일론 로프를 연결하여 구성하여 사용한다.
3) Inverse-Catenary 계류방식은 600m 이상의 깊은 수심에서 이용된다. NDBC는 부유 방식에 따라 Inverse-Catenary 계류방식을 두 가지로 나눈다. 현재 유리 부력체 방식은 오대호에서 주로 사용된다(담수로 구성되어 더 많은 부력을 필요). 폴리프로필렌 로프 방식은 유리 부력체 방식보다 배치하기가 더 쉽고 저렴하다. 그러나 중성 부력 형성에 필요한 부력을 폴리프로필렌 로프로만 만들기 때문에, 이 구성에는 로프의 지름과 길이에 따른 최소 깊이 제한이 있을 수 있다.
서해안의 평균 수심은 55m이기 때문에 대부분 해역에서 All-chain 방식이 유효하다. 실험을 위한 해역은 수심이 25m(해도 기준면: 약최저저조면 기준)로 All-chain 방식을 선택하였다. (NOAA, 1989)
2.2.2 서해안에서의 계류 시스템
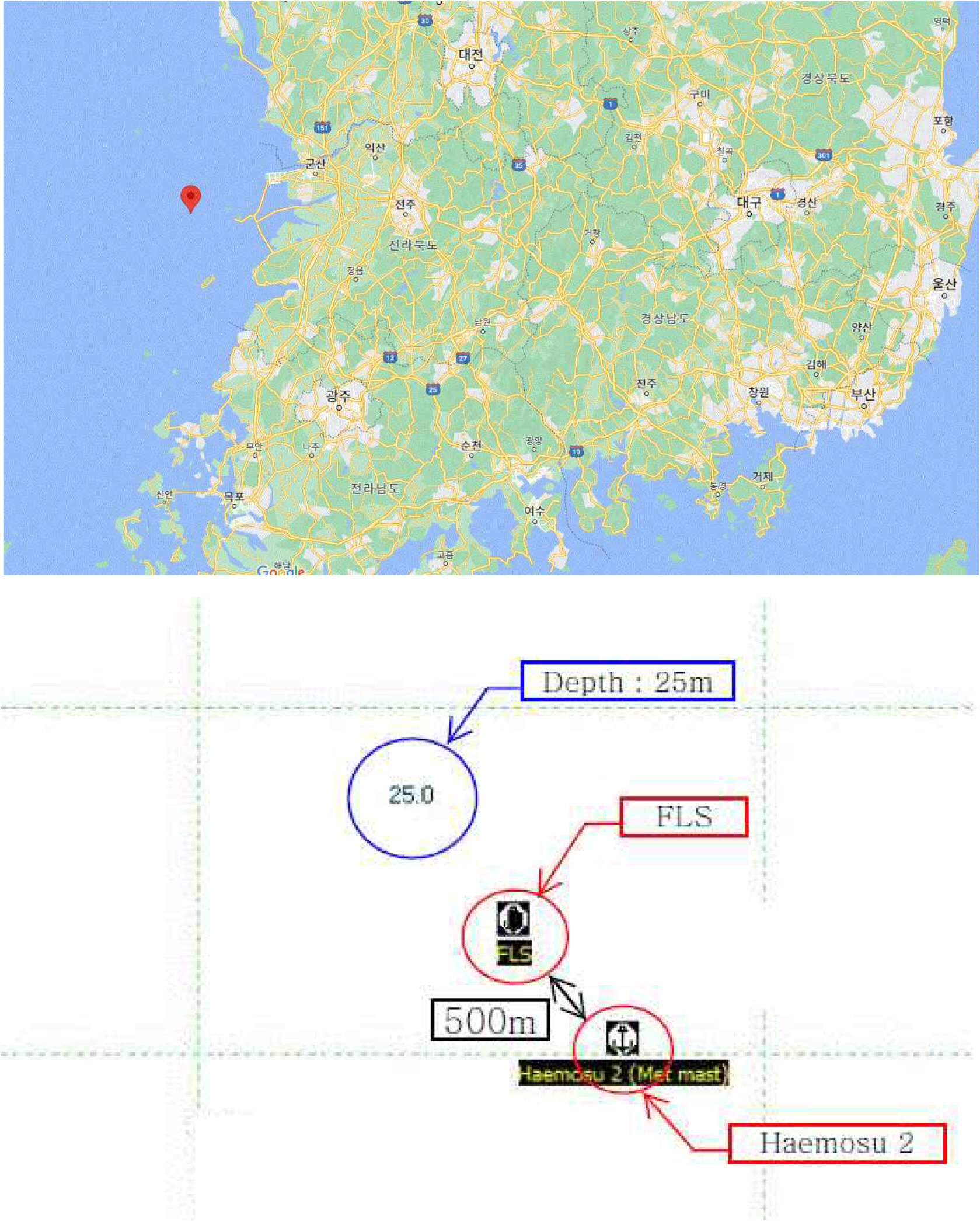
풍력발전단지를 조성하기 위한 해외의 업체들은 부유식 라이다로부터 얻는 풍황자원 자료의 상업적 이용을 위한 최소한의 기준으로 Carbon Trust의 OWA Stage 2 인증을 요구하고 있다. Stage 2 인증을 위해서는 고정식 풍황 계측 장비와 비교관측이 필요하며 Carbon Trust RP 73~87을 근거 기준으로 비교관측을 진행해야 한다. 비교관측을 위해 군산의 해모수 2호 고정식 기상탑을 기준지점으로 반경 500m의 지점을 선정하였다. 수심과 좌표는 Table 2와 같고, 좌표의 대략적인 위치를 나타내는 해도와 수심을 확인할 수 있는 위치도는 Fig. 4와 같다. (CARBON TRUST, 2016)
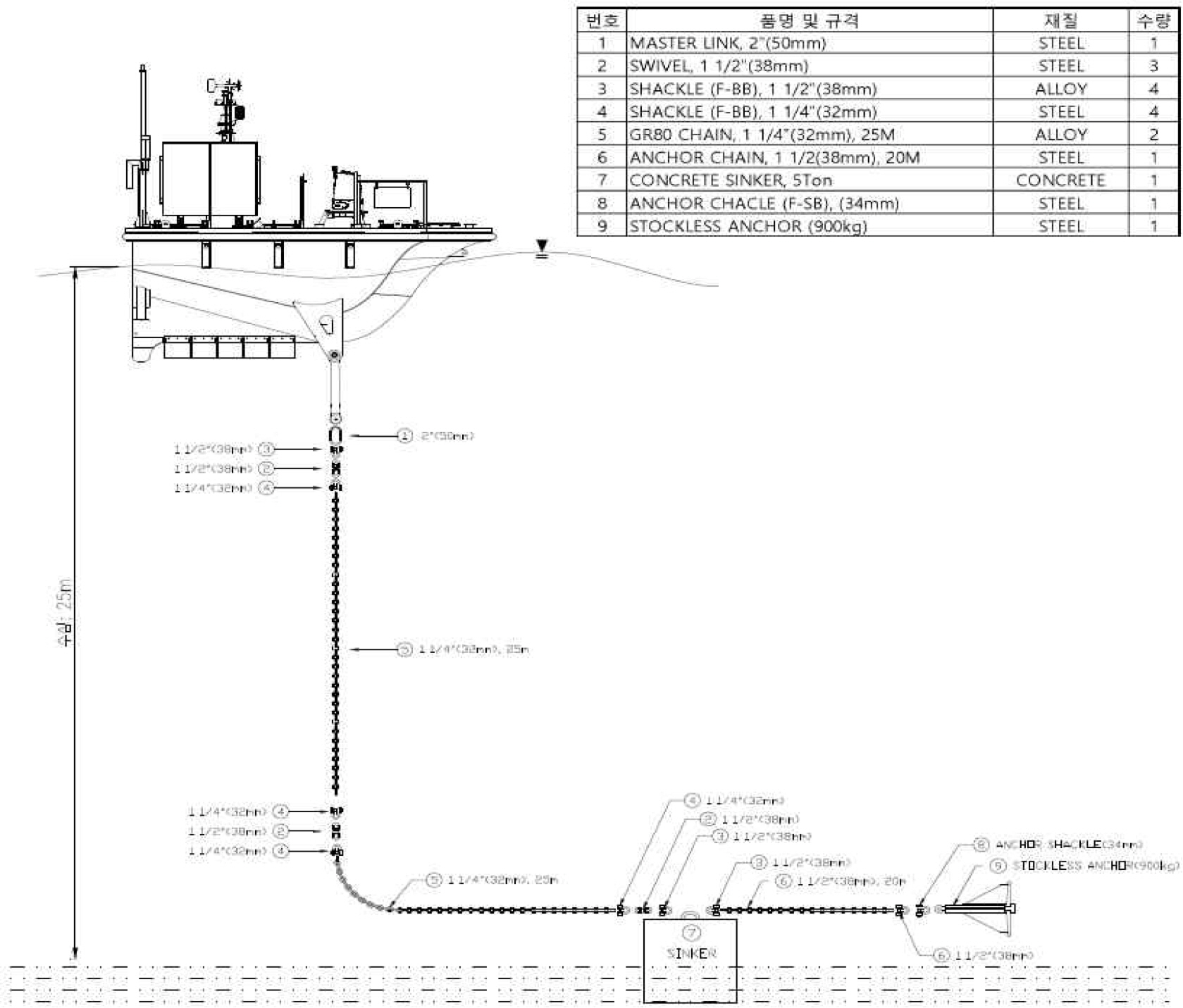
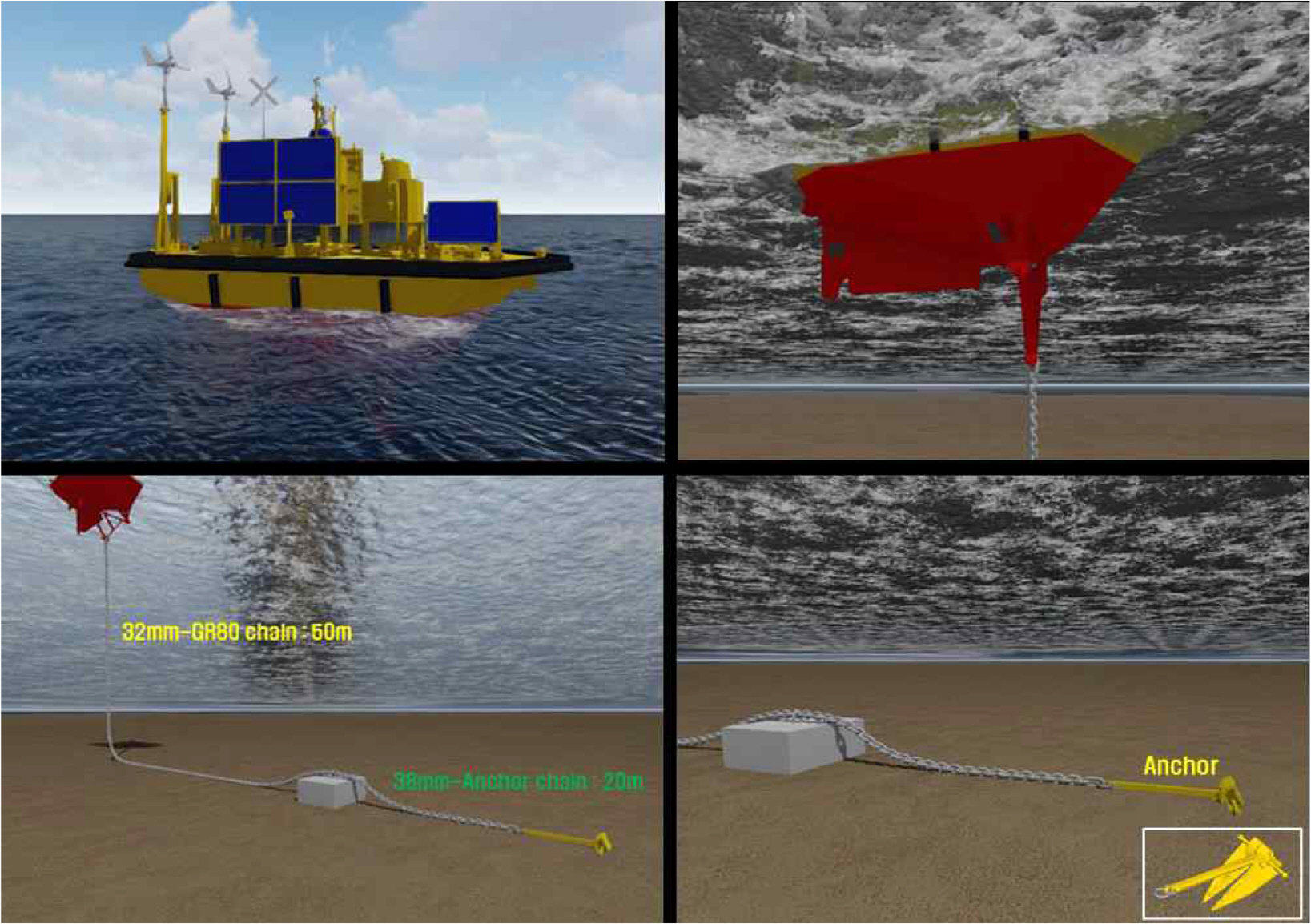
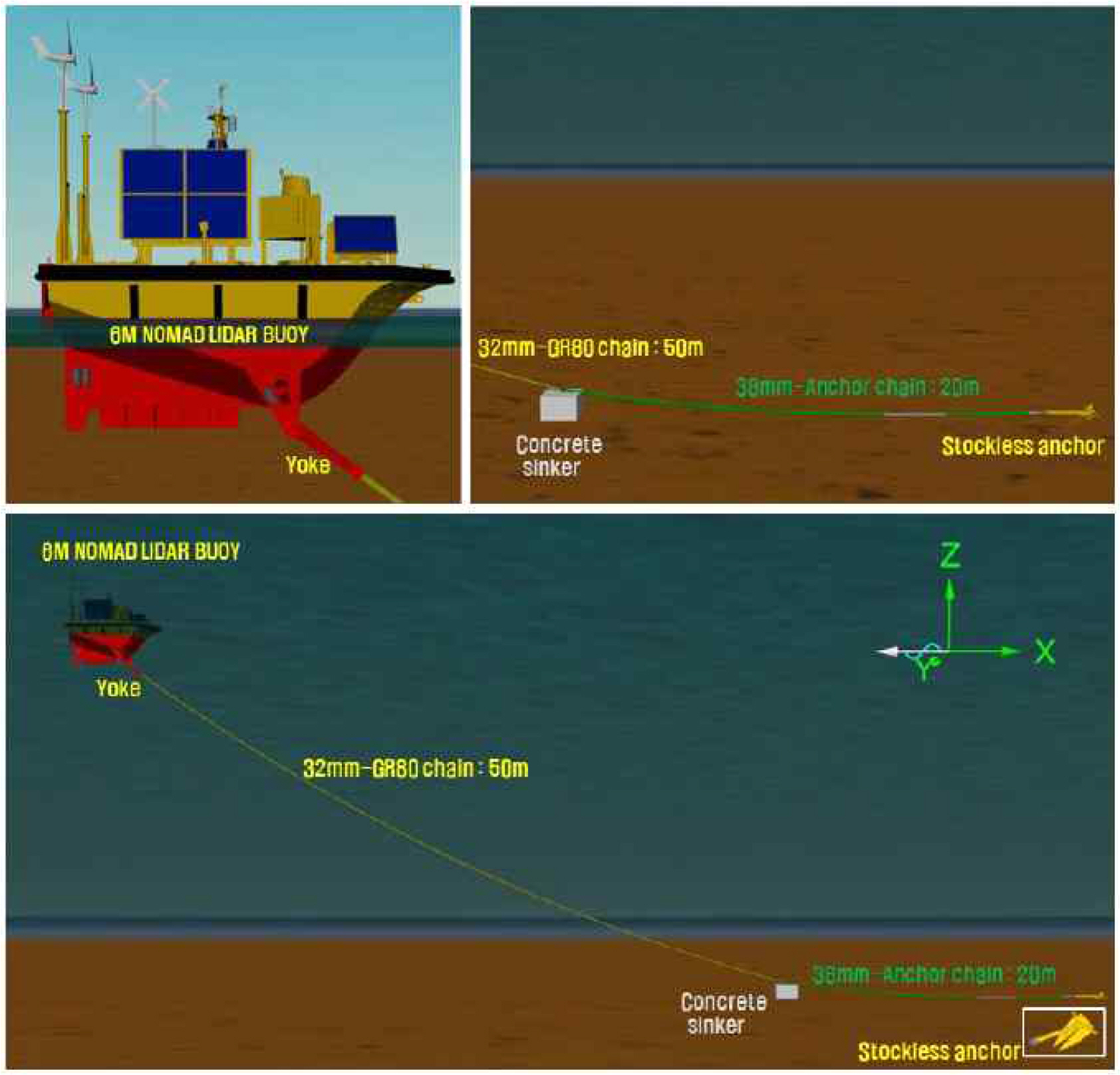
수심 25m에 적절한 6m 선박형 라이다 부이의 계류 시스템을 구성해보면 Fig. 5와 같이 나타낼 수 있으며, 이를 시뮬레이션 도구를 이용하여 3차원적으로 표현하면 Fig. 6과 같이 나타낼 수 있다. 계류 시스템을 구성하고 있는 각 구성품의 특성 데이터는 Table 3에 열거하였다. 계류라인의 길이 비율은 계류 수심과 방식에 따라 수심의 1.5∼4배를 산정하고 있으며 주변과의 수심 차이가 크지는 않으나 조석 차가 큰 해당 해역의 환경 특성을 고려하여 수심의 2배인 50m의 길이를 줬고, 계류구역의 고정점에서 수직 장력을 제어하기 위한 5tef의 콘크리트 싱커를 사용하였다. 해당 해역은 뻘과 모래 조개껍질(S, M, Sh) 등이 혼합된 해저를 구성하고 있어, 콘크리트 싱커가 완전히 안착하기 전까지는 주묘(Dragging Anchor) 상황이 발생할 수 있다. 이에 따라 수평 방향의 파지력을 높이기 위해 계류라인 끝에 900kgf 무게의 Stockless Anchor를 추가로 구성하였다.
2.3 수치모델링 및 해석
바람, 파도, 조류의 환경 하중 하에서 6m 선박형 라이다 부이의 운동 및 계류성능을 평가하기 위하여 OrcaWave와 OrcaFlex를 이용하여 수치해석을 수행하였다. (Orcina Ltd, 2013)
2.3.1 OrcaWave / Orcaflex
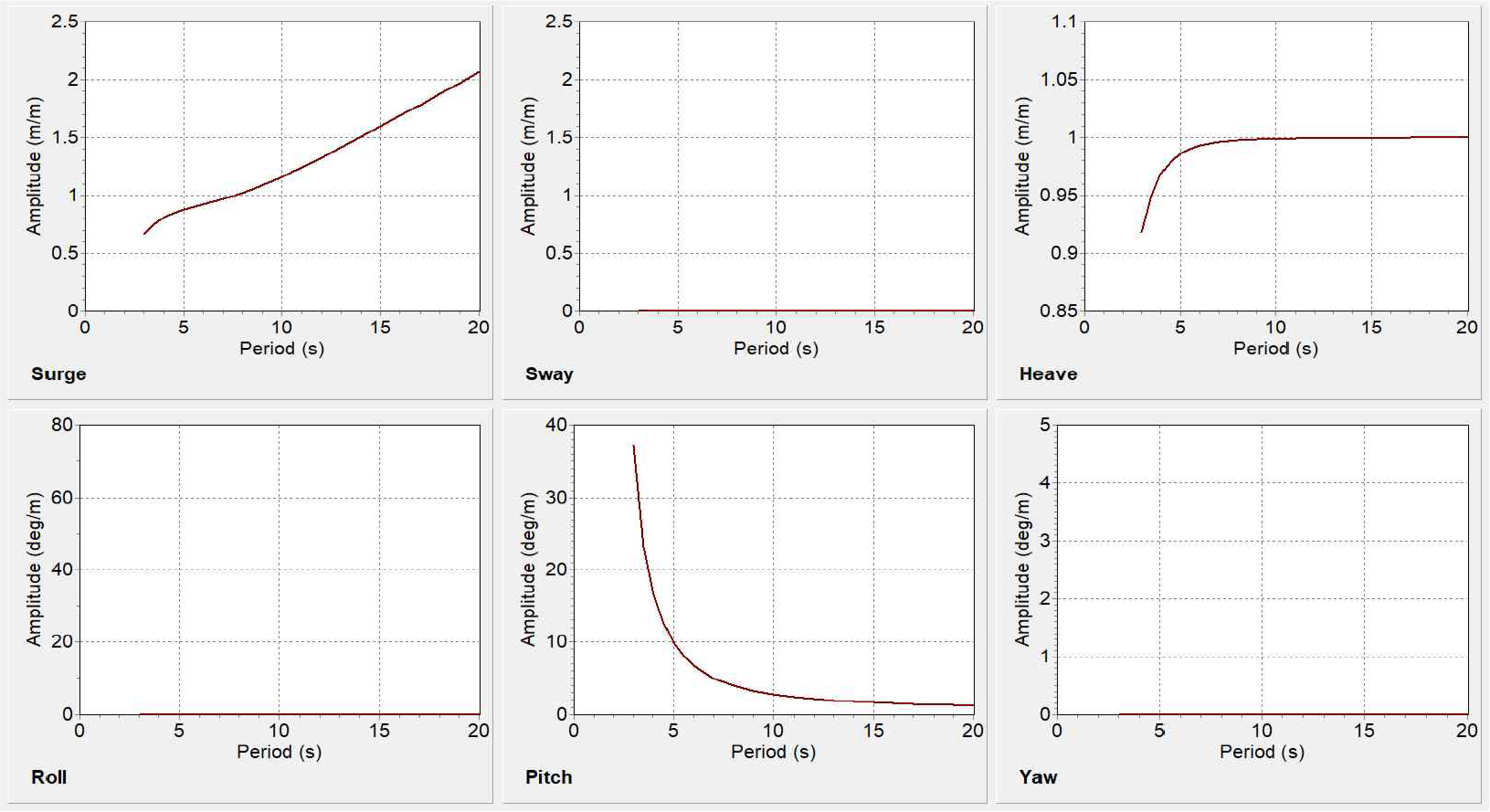
OrcaWave는 Orcina, Ltd.에서 개발한 회절 분석(Diffraction analysis) 프로그램으로서, 포텐셜 흐름 이론(Potential flow theory)을 통해 표면파(Surface wave)로 인해 물에 잠기는 물체의 하중 및 응답을 계산한다. OrcaWave는 6m NOMAD LiDAR Buoy의 6 자유도 운동인 RAO(Response Amplitude Operator : 응답 진폭 연산자) 생성을 위해 사용하였다.
OrcaFlex는 시간 영역에서의 다수의 물체, 유체 역학 시뮬레이션 프로그램으로서, 솔리드 구조와 선으로 연결된 부유체의 동적 거동 시뮬레이션에 최적화되어 있다. 계류라인은 유한 요소 기술을 사용하여 모델링 할 수 있다. OrcaFlex 모델에는 강성, 부가질량 및 감쇠, 해저 마찰 및 기타 물리효과를 포함하고 있다. 또한, 부유식/고정식 구조물, 수중 구조물과 상호 연결라인을 포함하고 있는 복잡한 시스템에 대해서도 그 결과가 매우 정확하고 효율적인 시뮬레이터로 알려져 있다.
OrcaWave를 통해 생성된 RAO를 활용하여 OrcaFlex에서 플로팅 부이와 일점 현수식 계류 시스템을 모델링하고 플로팅 라이다 부이의 시간 영역 동적 거동 및 계류 안정성을 평가하였다. 일정 지속시간 동안 시뮬레이션을 통해 아래와 같은 주요 결과물을 도출할 수 있었다.
● 계류라인에 걸리는 장력
● 플로팅 부이의 침수 가능성
● 플로팅 부이의 기울기 변화량
2.3.3 OrcaFlex : 시간 영역 동적 운동 및 계류해석
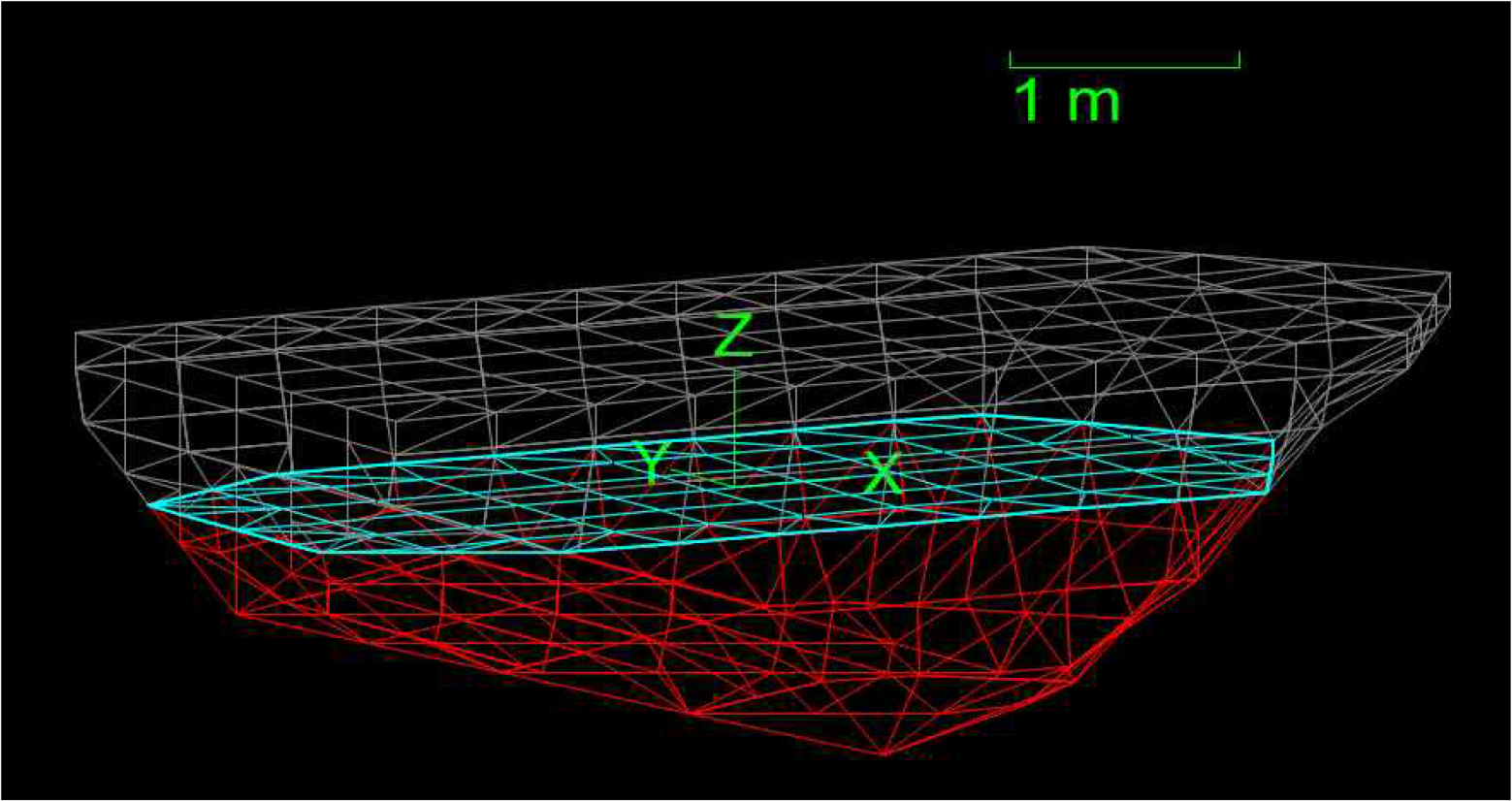
6m 선박형 라이다 부이 계류해석을 위한 OrcaFlex 모델은 Fig. 9에서 보여준 치수를 이용하여 모델링하였다. 선체, 요크(Yoke), 계류 체인, 콘크리트 싱커(Sinker), 스톡리스 앵커(Stockless Anchor)를 모두 포함하였다. 6m 선박형 라이다 부이는 강성, 부가질량 및 감쇠뿐만 아니라 변위 및 하중 RAO를 가지는 선박(Vessel)으로 모델링하였다.
요크(Yoke)는 OrcaFlex의 6D buoy를 사용하여 힌지 형태(Hinge type)로 부이 하단부에 연결하였다. 계류 체인(GR80 체인 50m 및 앵커 체인 20m)은 각각 OrcaFlex의 Lines를 사용하여 모델링하였으며, 굽힘이나 비틀림 강성이 없다고 가정하였다. 싱커(Sinker)는 GR80 5,000kgf 콘크리트 블록(1.5mx1.5mx1.0m)으로 OrcaFlex의 3D buoy를 사용하여 모델링하였으며, 체인(ø32mm, 50m)과 앵커체인(ø38mm, 20m) 사이에 연결되도록 하였다. 해저면은 수심 25m로 평평한 것으로 가정하였다. 스톡리스 앵커(Stockless Anchor)는 앵커 체인 끝단에 연결하였으며 실제 시뮬레이션을 위한 계산에는 포함하지 않았다.
Fig. 10은 OrcaFlex에서 모델링된 6m 선박형 라이다 부이의 계류 시스템을 보여준다. 수심 25m에서 일점 계류 시스템(Single point mooring system)으로 구성되도록 하였으며, 환경조건(파도, 바람, 조류)의 입사 방향도 함께 보여준다.
2.4 설계 조건
풍속 및 설계파 산정은 부이의 계류라인 설계에 큰 영향을 미치기 때문에 일반적으로 50년 또는 100년의 재현주기를 갖는 극한 조건으로 산정한다. 이동식 해양구조물 규칙(KR : 한국선급 발간, 2021)에서도 50년의 주기 내에서 예상되는 가장 가혹한 조건에 기초하도록 명기하고 있다.
본 해석에서는 전국 심해설계파 산출보고서 (해양수산부, 2019)의 자료를 토대로 부이의 설치 해역의 50년 재현주기 환경조건을 적용하였으며, 적용된 환경설계 기준(풍속, 파고/주기)은 Table 4와 같다.
한편, 설치현장의 수심과 최대 조류 유속은 군산항의 데이터를 참고하여 다음과 같이 적용하였다. (해양수산부, 2022)
● 수심 : 25.0m
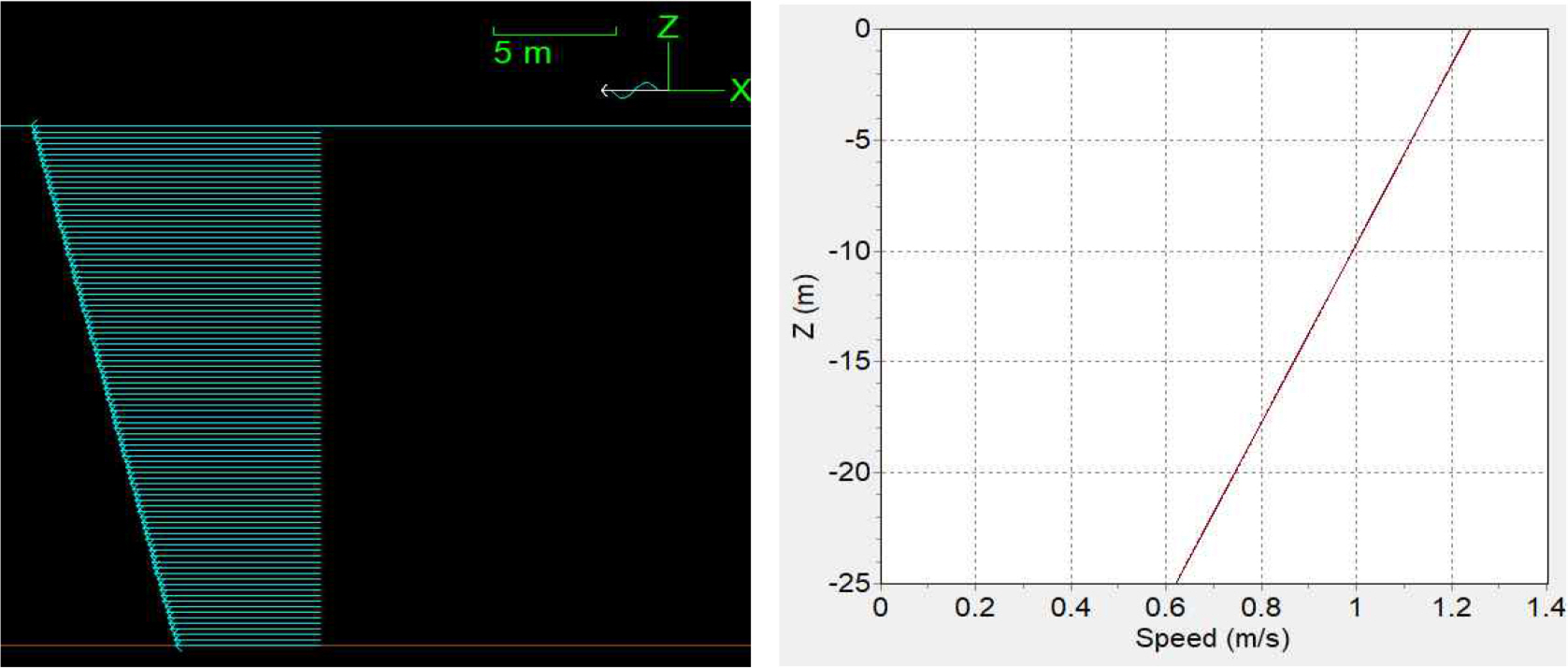
● 최대 조류 유속 : 1.24m/s (2.4knots), 해수면 기준
수심별 조류 유속은 Fig. 11에서와 같이 적용하였다. 해수면에서의 유속이 제일 빠르므로 1.24m/s로 적용하였고, 해저면에서는 마찰로 인한 감속이 나타나므로 0.62m/s로 적용하였다.
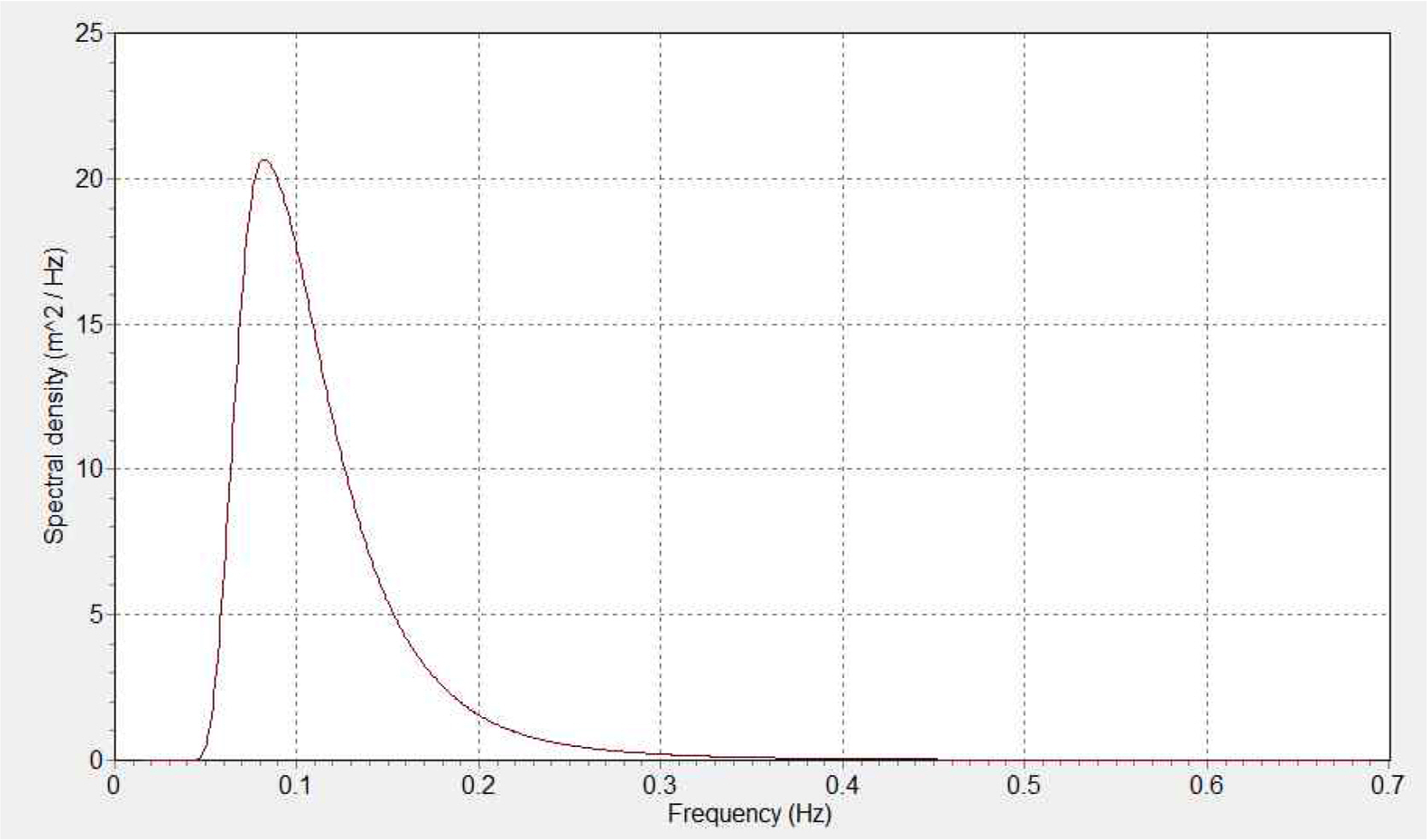
설치되는 해역의 수심은 25m로 얕은 수심이기 때문에 설치 수심을 고려해 TMA 스펙트럼을 적용하여 불규칙 파랑 조건을 부여하였다. 적용된 TMA 스펙트럼 형상은 Fig. 12에서 보는 바와 같다. 추가로 본 부이는 일점계류방식을 적용하기 때문에 파향에 대해서 Weather Vaning(선박이나 부유 구조물이 바람, 조류 또는 파랑의 작용 방향으로 선수가 향하도록 선회하는 움직임)하므로 파향별 고려는 불필요하다.
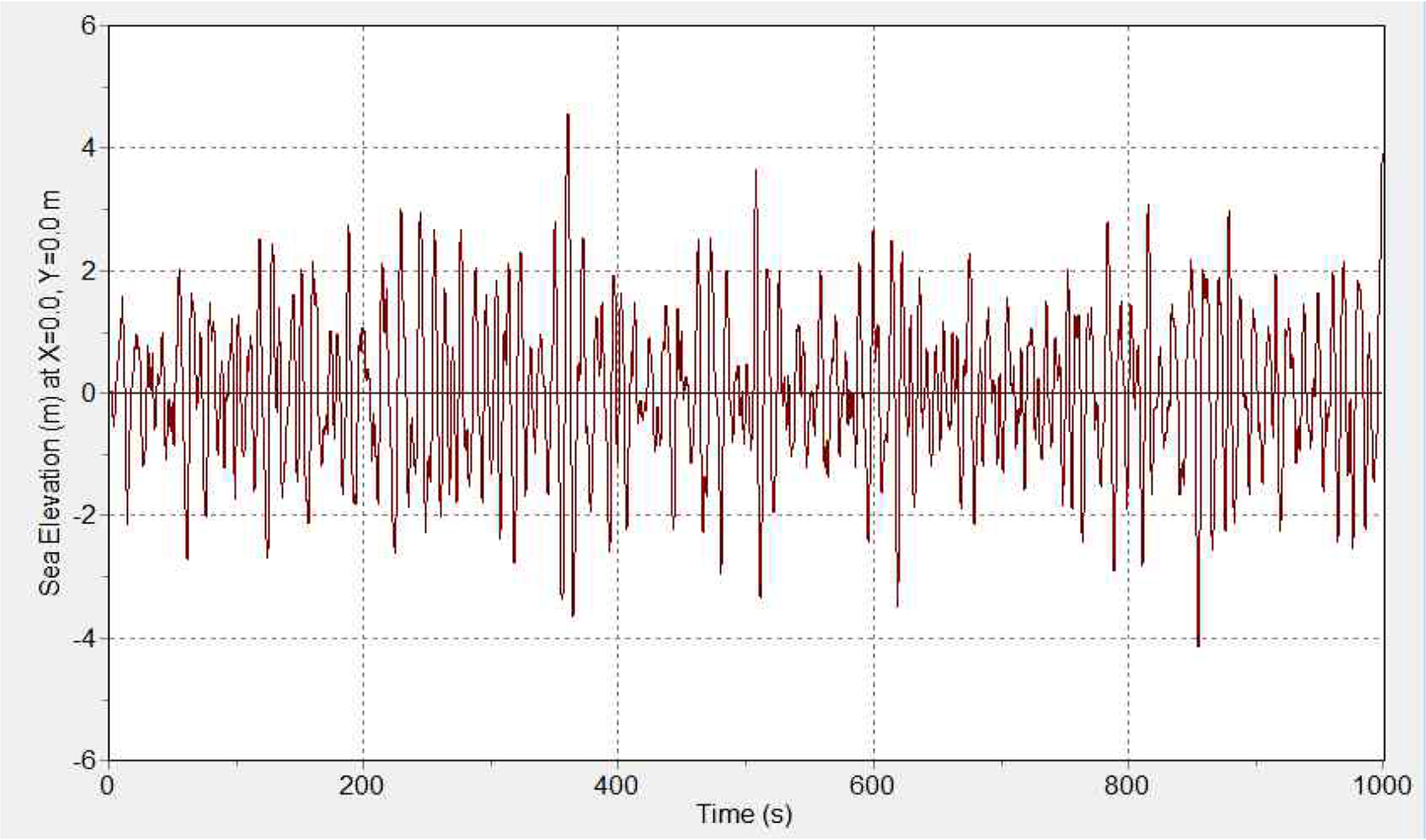
라이다 시스템에 적용된 계류라인에 최대의 장력을 적용하기 위해서 바람, 파랑 및 조류의 방향을 같은 방향으로 적용하였다. 시뮬레이션의 환경조건은 앞에서 언급한 설계기준을 사용하였으며, 불규칙 파를 대상으로 1,000초 동안 실행하였다. OrcaFlex에서 사용자 정의의 불규칙 파로서 TMA 스펙트럼에 의한 입사파 시계열은 Fig. 13에 나타내었다.
본 해석에 적용된 공기 및 해수의 특성은 다음과 같다.
● Air Density = 0.128kg/m3
● Air Kinematic Viscosity = 15 × 10-6m2/s
● Sea Water Temperature = 10°C
● Sea Water Density = 1.025kg/m3
● Sea Water Kinematic Viscosity = 1.35 × 10-6m2/s
2.5 해석 결과
2.5.1 계류라인에 대한 해석 결과
라이다 시스템을 극한환경에서 일점계류방식으로 설치하였을 때 충분한 강도를 가질 수 있는지에 대해 계류해석을 실시하였다. 보수적인 해석을 위하여 50년 재현주기의 바람, 조류, 파랑에 대한 작용 방향을 같은 방향으로 가정하였다.
2.5.2 앵커링에 대한 평가
라이다 시스템의 위치 유지를 위해서 5.0tef 콘크리트 싱커(Sinker)와 0.9tef 의 스톡리스 앵커(Stockless Anchor)를 사용하였고 싱커와 앵커 사이에는 1 1/2”(38mm) 앵커 체인으로 연결하였다.
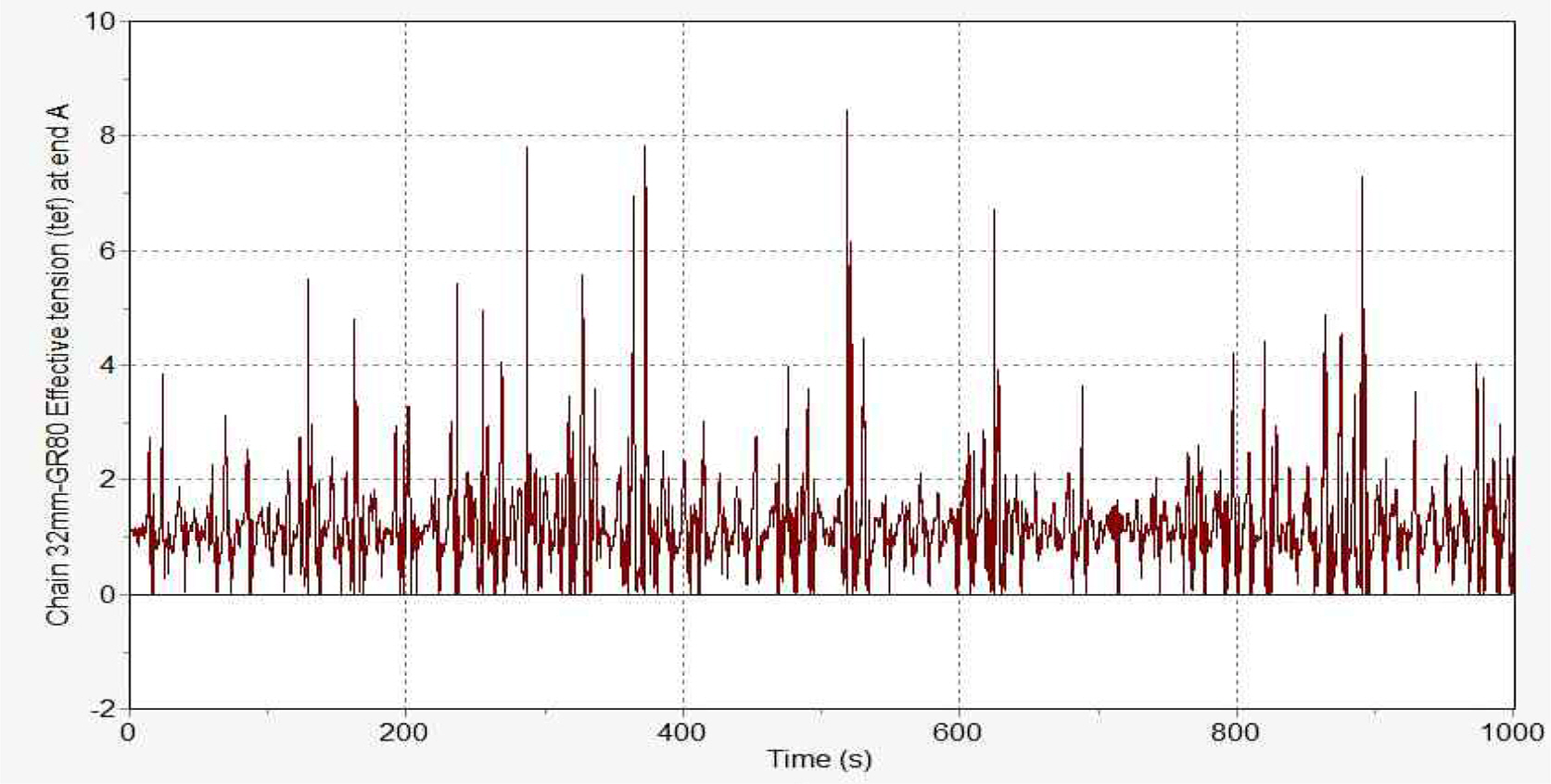
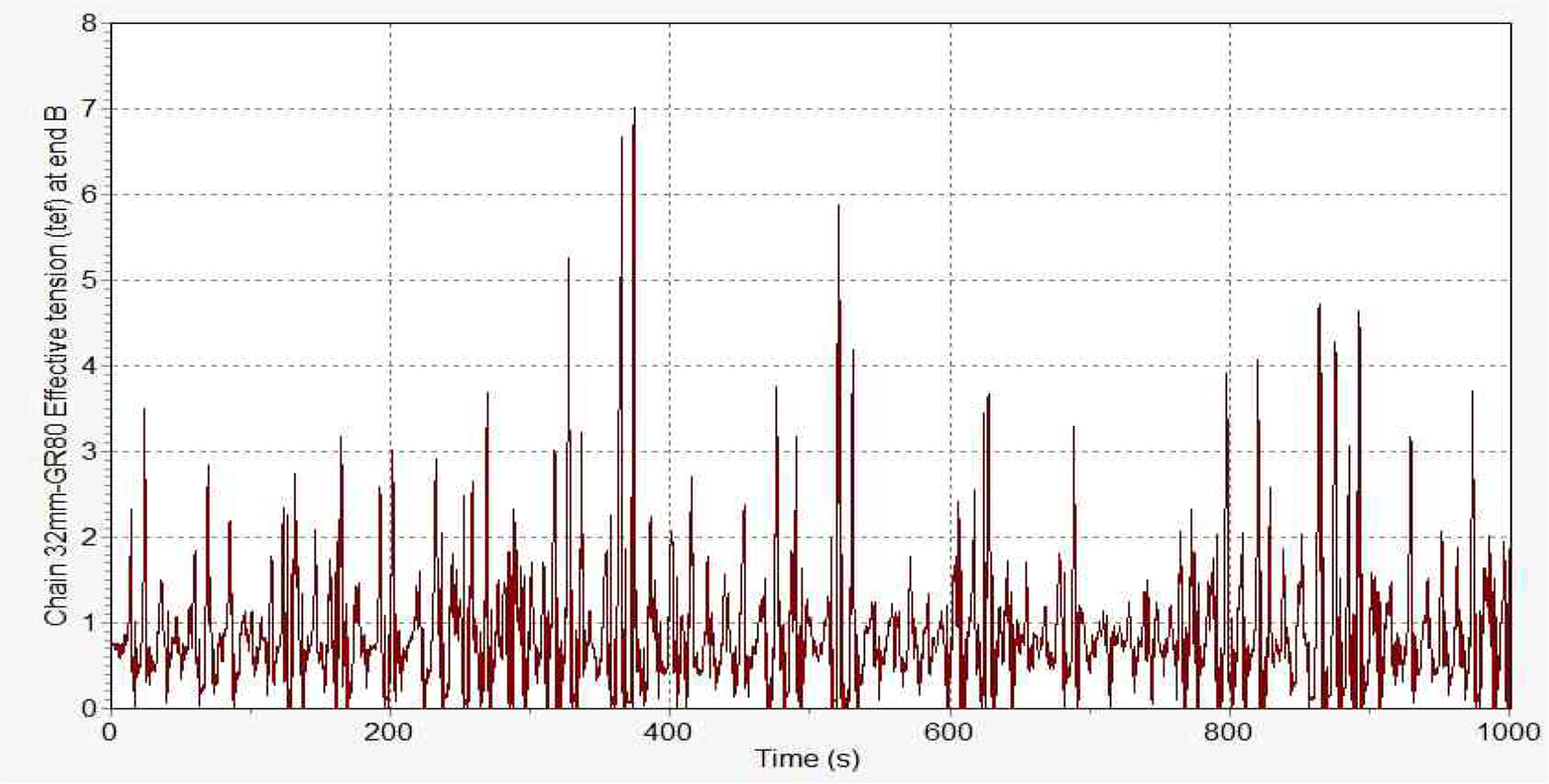
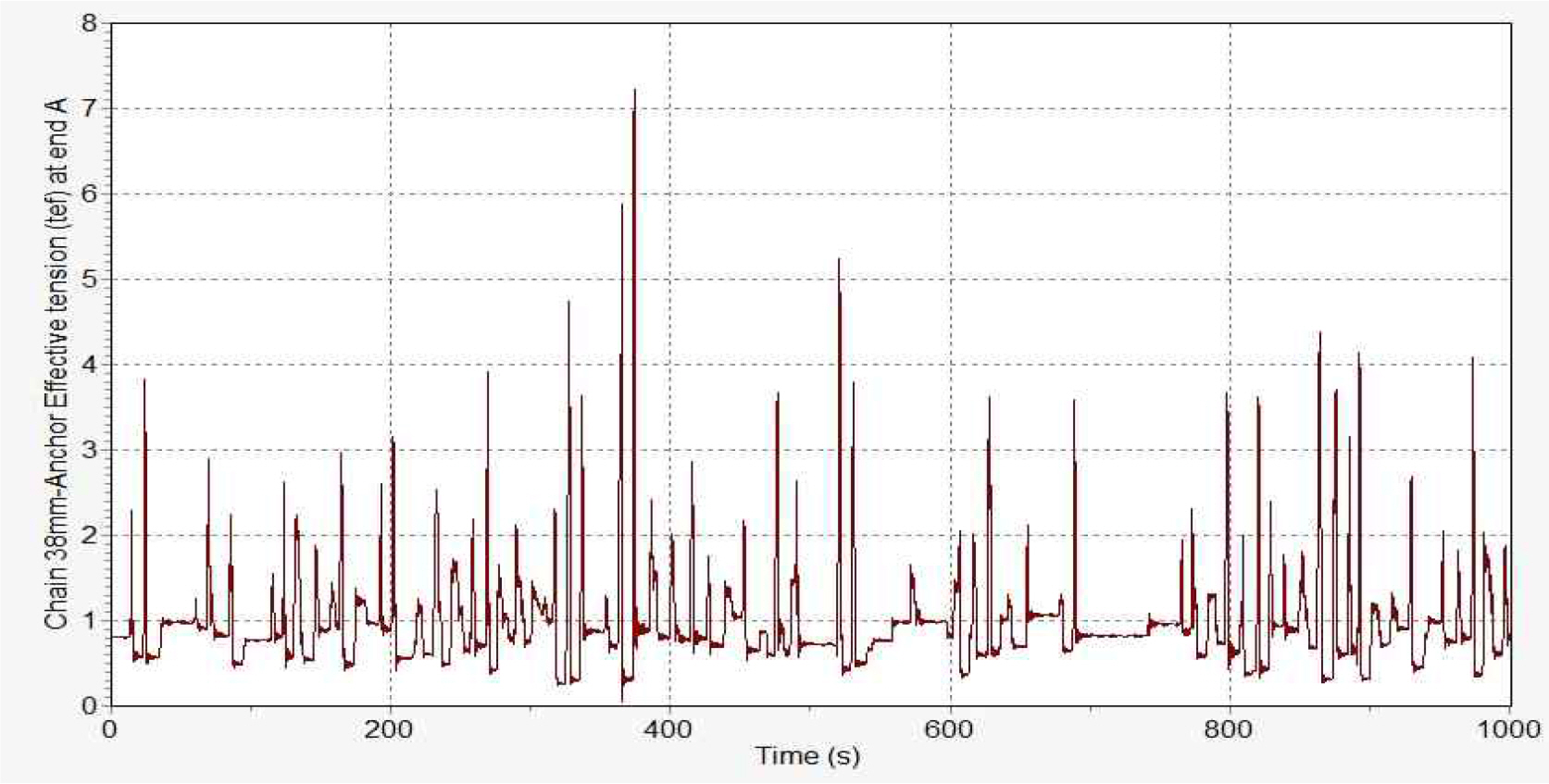
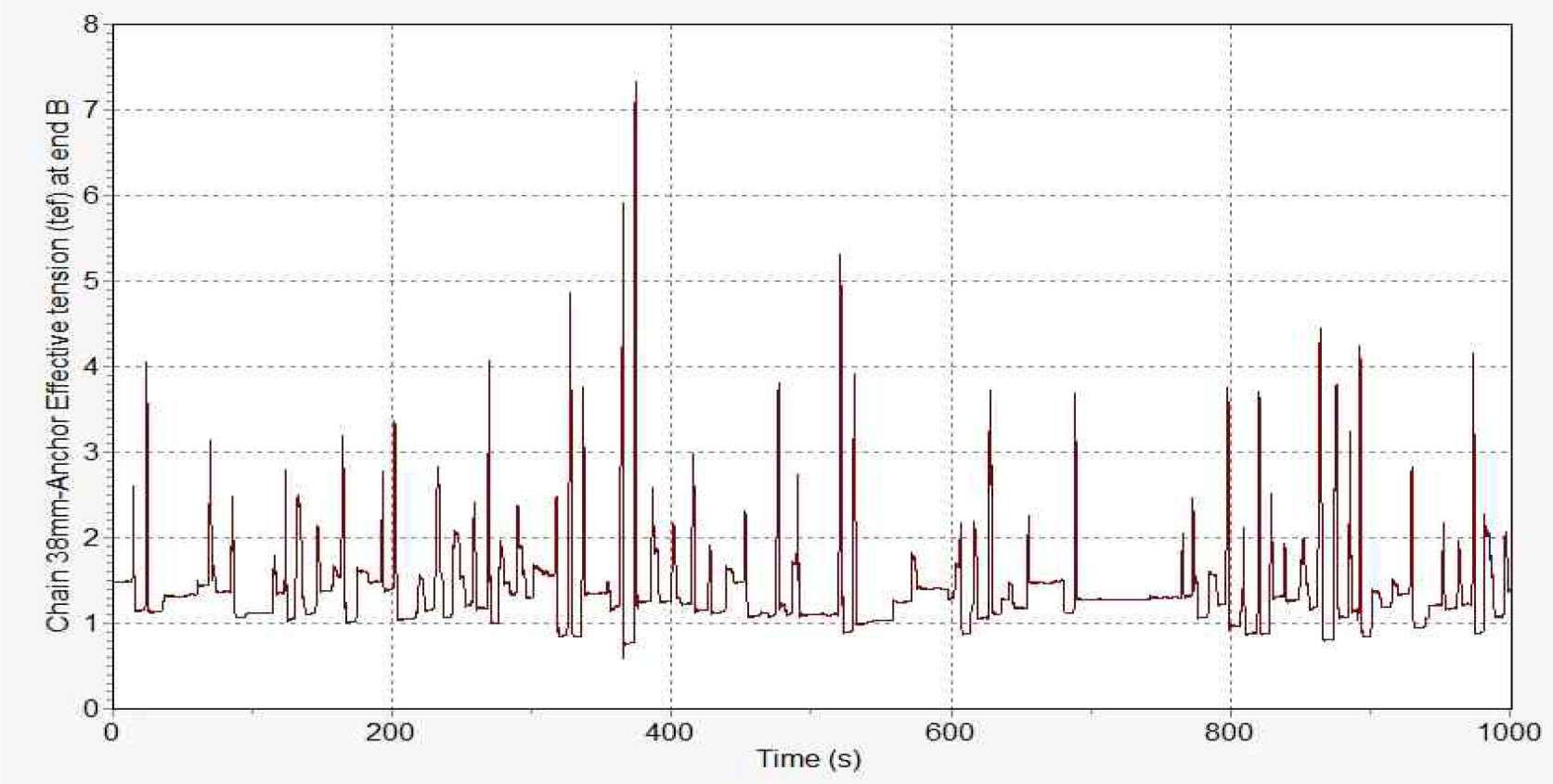
앵커 체인의 콘크리트 싱커 연결지점(End-A)과 스톡리스 앵커 연결지점(End-B)에 발생한 장력의 크기는 Fig. 16, 17과 같다. 앵커 체인에 발행하는 최대 장력은 스톡리스 앵커 연결지점에서 발생한 7.33tef로 앵커 체인의 안전하중인 29.60tef 이내로 나타나는 것을 알 수 있다.
라이다 시스템의 주묘 현상을 방지하기 위해서 앵커점에서 발생하는 수직 하중을 상쇄하기 위해 콘크리트 싱커를 사용하였으며 스톡리스 앵커를 통해 수평 파지력을 확보할 수 있도록 설계하였다.
Fig. 18 그래프는 환경 하중에 대해 계류라인의 형상을 최대, 평균, 최소 3가지로 나타낸 것으로 계류라인이 최대로 이출 될 때도 콘크리트 싱커와 연결된 지점의 수직 위치변화가 없이 같은 것으로 나타나 충분히 수직 장력에 저항할 수 있는 것을 알 수 있다.
스톡리스 앵커와의 연결지점에서 발생하는 최대 장력의 크기는 7.330tef로 나타났으며 0.9tef 스톡리스 앵커 (약 2 kips, 35° Fluke Angle)가 가지는 파지력은 약 8.61tef (19 kips) 정도로 충분한 파지력을 가지는 것으로 나타났다. (API RP 2FP1, 1993)
3. 결 론
플로팅 라이다 부이를 설치하는 목적은 풍황조사이다. 그러나 예기치 못한 기상 환경 때문에 부이가 위치를 이탈하게 되면, 이탈한 기간 동안 수집하지 못한 자료 복구를 위해 시간과 비용이 많이 소요된다. 이를 최소화하기 위해 부이 계류 시스템을 설계할 때 극한환경 조건에서 대처할 수 있어야 하고 일정한 계류 위치를 유지할 수 있어야 한다.
보수적인 입장에서 해석을 바라보기 위해, 적어도 50년의 주기 내에서 예상되는 가장 가혹한 조건에 기초하여 해석을 진행하였다. 50년 주기로 해석을 수행한 결과, 6m 선박형 라이다 부이의 계류 시스템이 위치를 유지하기 위한 충분한 강도를 가지는 것을 볼 수 있었다. 이러한 결과를 통해서 서해안의 환경조건에서도 라이다 시스템이 안정적으로 운영될 것이라고 예상할 수 있다.
기상청에서 운영하는 선박형 6m NOMAD MetOcean 부이 또한 6m NOMAD 라이다 부이와 외형이 매우 유사하며, 6m NOMAD MetOcean 부이는 동해와 남해 등 해역에서 주로 운영되고 있다. 본 해석을 통하여 선박형 6m NOMAD 부이를 서해안에서 운영하는 데에도 문제가 없는 것이 충분히 입증되었으며, 실제 관측을 통하여 시뮬레이션 결과를 재평가할 계획이다. 현재 해당 장비는 시뮬레이션 대상 해역에 실제 설치되었으며, 앞으로 6개월 이상 운영하면서 기상에 따른 모션의 변화량 등을 관측할 예정이고, 해당 영향평가와 아울러 실험 데이터를 토대로 해수 전지를 탑재한 새로운 형태의 라이다 부이를 개발하는 기초자료로 활용하고자 한다.


 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






