


1. м„ң лЎ
мһҗмңЁмҡҙн•ӯ м„ л°•мқҖ м•Ҳм „н•ҳкі кІҪм ңм Ғмқё н•ӯн–үмқ„ лӘ©н‘ңлЎң, мЈјмҡ”мһҘ비мқҳ мӢӨмӢңк°„ мғҒнғң лӘЁлӢҲн„°л§Ғ л°Ҹ кі мһҘ진лӢЁмқ„ мң„н•ң PHM (Prognostics and health management), м„ л°•кіј мңЎмғҒ к°„мқҳ мң„м„ұнҶөмӢ , мөңм Ғ н•ӯлЎң нғҗмғү л“ұмқҳ мҡ”мҶҢкё°мҲ мқ„ н•„мҡ”лЎң н•ңлӢӨ (Aslam et al., 2020; Wang et al., 2020). PHM кё°мҲ мқҖ мһҘ비мқҳ мӢ нҳёлЎңл¶Җн„° м •мғҒ к°ҖлҸҷ м—¬л¶ҖлҘј нҢҗлӢЁн•ҳл©°, м„ л°•м—җм„ңлҠ” лӘЁмӮ¬ мһҘ비лҘј лҢҖмғҒмңјлЎң м Ғмҡ©л°©м•Ҳмқ„ нғҗмғүн•ҳлҠ” м—°кө¬к°Җ мЈјлЎң 진н–үлҗҳкі мһҲлӢӨ (Ellefsen et al., 2019). м„ л°• мҡҙмҡ©мһҗмқҳ кІҪн—ҳмңјлЎң кі мһҘмқ„ 진лӢЁн•ҳлҠ” кіјм •мқ„ м „л¬ёк°Җ мӢңмҠӨн…ңмңјлЎң кө¬м¶•н•ң м—°кө¬лҸ„ мҶҢк°ңлҗҳм—ҲлӢӨ(Liang et al., 2020). лӢӨл§Ң, кІҪн—ҳм—җ кё°л°ҳн•ң кі мһҘ 진лӢЁмқҖ к°қкҙҖм Ғ м§Җн‘ңм„ м •мқҙ м–ҙл Өмҡҙ лӢЁм җмқҙ мһҲлӢӨ.
ліё м—°кө¬лҠ” м„ л°• м—°лЈҢкё°кё°лҘҳмқҳ мқҙмғҒк°җм§Җ л°Ҹ кі мһҘ진лӢЁм—җ мҙҲм җмқ„ л§һм¶”кі мһҲлӢӨ. м„ л°•м—җ нғ‘мһ¬лҗҳлҠ” мһҘ비мқҳ мңЎмғҒ мӢӨмҰқ лҚ°мқҙн„°лҘј мқёкіөм§ҖлҠҘ лӘЁлҚёлЎң н•ҷмҠөн•ҳм—¬ мқҙмғҒк°җм§Җ л°Ҹ кі мһҘ진лӢЁ нҢЁн„ҙмқ„ м°ҫкі мһҗ н•ҳмҳҖлӢӨ. лҢҖмғҒмһҘ비лҠ” 엔진м—җ м—°лЈҢлҘј кіөкёүн•ҳлҠ” мІӯм •кё°мҷҖ м—°лЈҢнҺҢн”„лҘј м„ м •н•ҳмҳҖлӢӨ. к°Ғ мһҘ비лҠ” 1,500 RPM мқҙмғҒмңјлЎң кі мҶҚ нҡҢм „н•ҳлҜҖлЎң, 진лҸҷ мӢ нҳёк°Җ кі мһҘмқҳ м§Җн‘ңк°Җ лҗ мҲҳ мһҲлӢӨ. мһҘмӢңк°„ н•ӯн–ү л°Ҹ мҡҙмҡ© мӢңм—җ л°ңмғқн•ҳлҠ” 진лҸҷмӢ нҳёлҠ” мҡҙм „мғҒнғңлҘј лҢҖн‘ңн•ҳлҠ” мқёмһҗлҘј нҸ¬н•Ён•ҳкі мһҲм§Җл§Ң, мғҒнғң м •ліҙк°Җ лҲ„м ҒлҗҳлҠ” мӢңк°„ мў…мҶҚм Ғ нҠ№м§•мқ„ к°Җм§Җкі мһҲлӢӨ. л”°лқјм„ң лҲ„м ҒлҗҳлҠ” м—ҙнҷ”м—җ л”°лҘё мқҙмғҒ л°Ҹ кі мһҘмқ„ к°җм§Җн•ҳкё° мң„н•ҙм„ңлҠ” лҚ°мқҙн„°мқҳ мӢңк°„ мў…мҶҚм„ұмқ„ кі л Өн•ң м ‘к·јл°©лІ•мқҙ н•„мҡ”н•ҳлӢӨ(Liu et al., 2018; Lei et al., 2013).
нҡҢм „ кё°кё°мқҳ 진лҸҷ мӢ нҳёлЎңл¶Җн„° мӢңк°„ л°Ҹ мЈјнҢҢмҲҳ мҳҒм—ӯ нҠ№м§•(Feature)мқ„ 추м¶ңн•ҳкі кё°кі„ н•ҷмҠөмқ„ мқҙмҡ©н•ҳм—¬ кё°кё°мқҳ мқҙмғҒ лҳҗлҠ” кі мһҘмқ„ 분лҘҳн•ң м—°кө¬лҠ” лӢӨмҲҳ м°ҫмқ„ мҲҳ мһҲлӢӨ(Lei et al., 2020; He and He, 2017). к·ёлҹ¬лӮҳ, кё°кі„н•ҷмҠөмқҖ мқјм •н•ң мӢңк°„к°„кІ©мңјлЎң мқёмһҗлҘј 추м¶ңн•ҳкі м°Ёмӣҗ축мҶҢлҘј м Ғмҡ©н•ҳкё° л•Ңл¬ём—җ мӢңк°„мҳҒм—ӯ мқёмһҗлҘј кі л Өн•ҳкё°м—җлҠ” н•ңкі„к°Җ мһҲлӢӨ. н•ңнҺё, мӢңкі„м—ҙ мӢ нҳёлҘј мқјм • мӢңк°„ к°„кІ©мңјлЎң мӢңк°„-мЈјнҢҢмҲҳ мқҙлҜём§ҖлЎң ліҖнҷҳн•ҳкі , CNNкі„м—ҙмқҳ Conv2D лӘЁлҚёмқ„ м Ғмҡ©н•ҳм—¬ мЈјнҢҢмҲҳ нҸ¬лқҪ м„ мңјлЎңл¶Җн„° мқҙмғҒк°җм§ҖлҘј мҲҳн–үн•ң л°©лІ•лҸ„ мһҲлӢӨ(Tao et al., 2020; Verstraete et al., 2017; Zhang et al., 2017). к·ёлҹ¬лӮҳ Conv2D лӘЁлҚёмқҳ мқҙлҜём§Җ 분м„қмқ„ мқҙмҡ©н•ң л°©лІ•лҸ„ к°Ғ мӢңк°„ к°„кІ©мқҳ лҸ…лҰҪм Ғмқё нҠ№м§•л§Ң нҸ¬н•Ён•ҳлҠ” лӢЁм җмқҙ мһҲлӢӨ. мӢ нҳё мӢңкі„м—ҙмқҳ мӢңк°„ мў…мҶҚм„ұмқ„ л°ҳмҳҒн•ҳкё° мң„н•ҙм„ң мҠ¬лқјмқҙл”© мңҲлҸ„мҡ°(Sliding window) кё°лІ•мқ„ м Ғмҡ©н•ҳм—¬ CNN кё°л°ҳмқҳ Conv1D лӘЁлҚёлҸ„ м—°кө¬лҗҳм—ҲлӢӨ. Conv1D лӘЁлҚёмқҖ н•©м„ұкіұ м—°мӮ°мқ„ 1м°ЁмӣҗмңјлЎң м ңн•ңн•ҳм—¬ мӢңкі„м—ҙ лҚ°мқҙн„°м—җм„ң мӢңк°„ мў…мҶҚм„ұмқ„ л°ҳмҳҒн•ҳм—¬ нҠ№м§•мқ„ н•ҷмҠөн•ҳлҠ”лҚ° лӣ°м–ҙлӮң мһҘм җмқ„ к°Җ진 кІғмңјлЎң м•Ңл Өм ё мһҲлӢӨ(Chen et al., 2016; Jung et al., 2019).
ліё м—°кө¬лҠ” мӢңкі„м—ҙ лҚ°мқҙн„°мқҳ мӢңк°„ мў…мҶҚм„ұмқ„ л°ҳмҳҒн• мҲҳ мһҲлҠ” Conv1D лӘЁлҚёмқҳ н•©м„ұкіұ м—°мӮ° нҠ№м§•мқ„ кі л Өн•ҳм—¬ м„ л°• м—°лЈҢ нҺҢн”„мҷҖ мІӯм •кё°мқҳ кі мһҘ мў…лҘҳлҘј мҳҲмёЎн• мҲҳ мһҲлҠ” м•Ңкі лҰ¬мҰҳ н•ҷмҠө м Ҳм°ЁлҘј м ңмӢңн•ҳкі мһҗ н•ңлӢӨ.
2. лҢҖмғҒмһҘ비 л°Ҹ кі„мёЎ лҚ°мқҙн„°
2.1 лҢҖмғҒмһҘ비 л°Ҹ мӢӨн—ҳмЎ°кұҙ
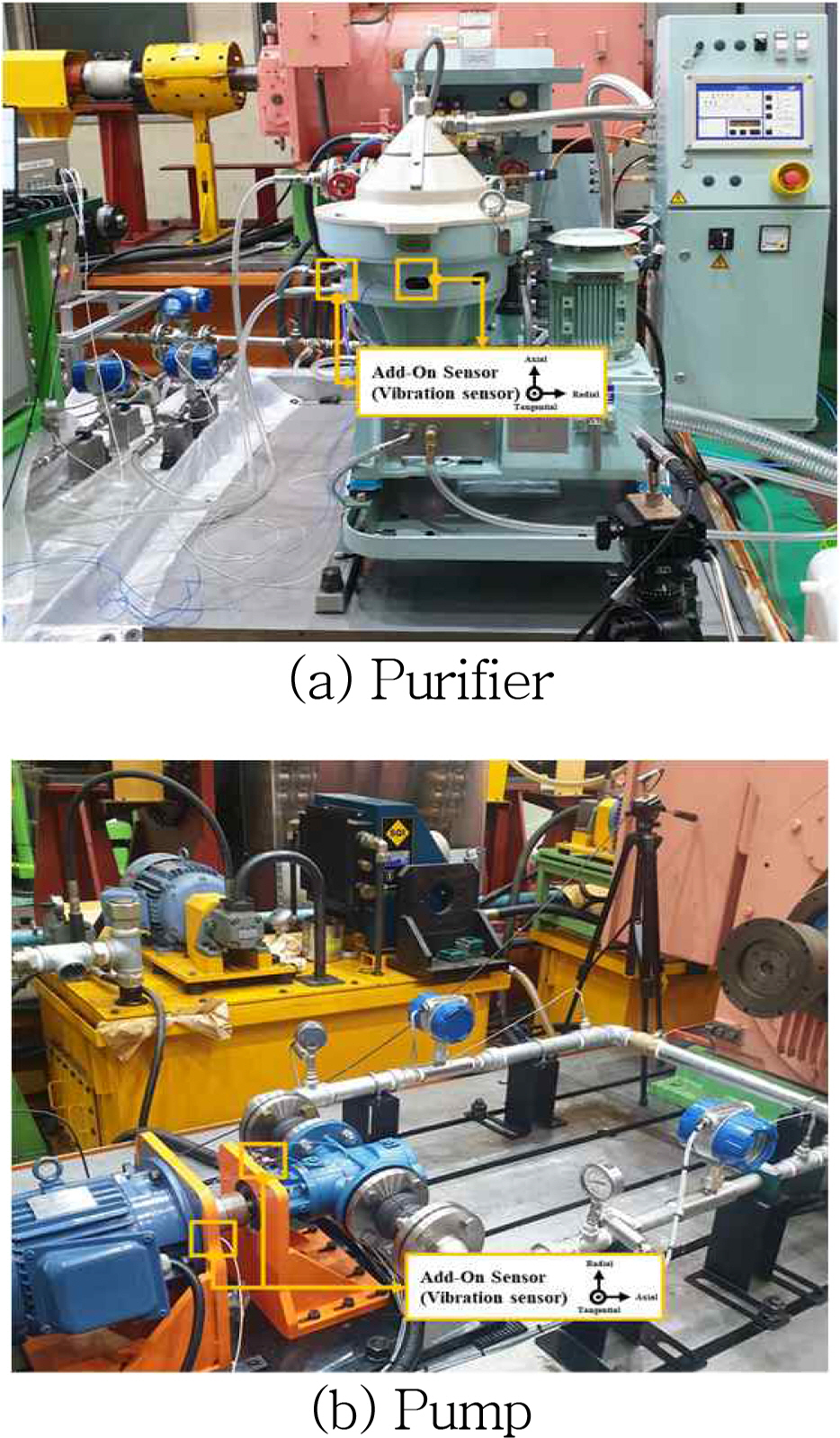
ліё м—°кө¬м—җм„ң м Ғмҡ©н•ң лҢҖмғҒмһҘ비мҷҖ мӢӨн—ҳ лҚ°мқҙн„°лҠ” м„ л°•м—җ нғ‘мһ¬лҗҳлҠ” нҺҢн”„(Pump)мҷҖ мІӯм •кё°(Purifier)мқҳ мңЎмғҒ мӢӨн—ҳ кІ°кіј (Lee et al., 2022)мқҙлӢӨ. мІӯм •кё°мҷҖ м—°лЈҢ нҺҢн”„лҠ” к°Ғк°Ғ Alfa laval мӮ¬мқҳ S805 м ңн’Ҳкіј KRALмӮ¬мқҳ Screw нҺҢн”„мқҙлӢӨ. л‘җ мһҘ비лҠ” к°Ғк°Ғ 9,300RPMкіј 1,770RPM лЎң нҡҢм „н•ҳл©°, к°Ғк°Ғ 10 к°ң л°Ҹ 12 к°ң кі мһҘ мЎ°кұҙмқ„ мқёмң„м ҒмңјлЎң л¶Җм—¬н•ң мғҒнғңм—җм„ң мӢӨн—ҳлҗҳм—ҲлӢӨ. кі мһҘлӘЁл“ңлҠ” кІ°н•ЁмҲҳ분м„қ(Fault tree analysis)мңјлЎңл¶Җн„° кІ°м •н•ҳмҳҖмңјл©°, л§ҲлӘЁ(Wear), м—ҙнҷ” л“ұмқ„ нҸ¬н•Ён•ҳмҳҖлӢӨ. Table 1м—җ м •лҰ¬н•ң кІғкіј к°ҷмқҙ м •мғҒ мғҒнғңм—җм„ң мІӯм •кё°лҠ” 180분, нҺҢн”„лҠ” 50분 лҸҷм•Ҳ мӢӨн—ҳн•ҳкі , кі мһҘ мғҒнғңм—җм„ң мІӯм •кё°лҠ” 1,790분, нҺҢн”„лҠ” 810분 лҸҷм•Ҳ мӢӨн—ҳн•ҳмҳҖлӢӨ. к°Ғ мһҘ비мқҳ 2к°ң мң„м№ҳм—җ 3축(Axial, Tangential, Radial) 진лҸҷ м„јм„ңлҘј л¶Җм°©н•ҳкі , 25.6 kHzмқҳ мЈјкё°лЎң мӢ нҳёлҘј кі„мёЎн•ҳмҳҖлӢӨ. Fig. 1мқҖ кі мһҘ лӘЁмӮ¬ мһҘ비мқҳ кө¬м„ұмқҙлӢӨ (Lee et al., 2022).
2.2 кі„мёЎ лҚ°мқҙн„°мқҳ мӢңк°„ мў…мҶҚм„ұ
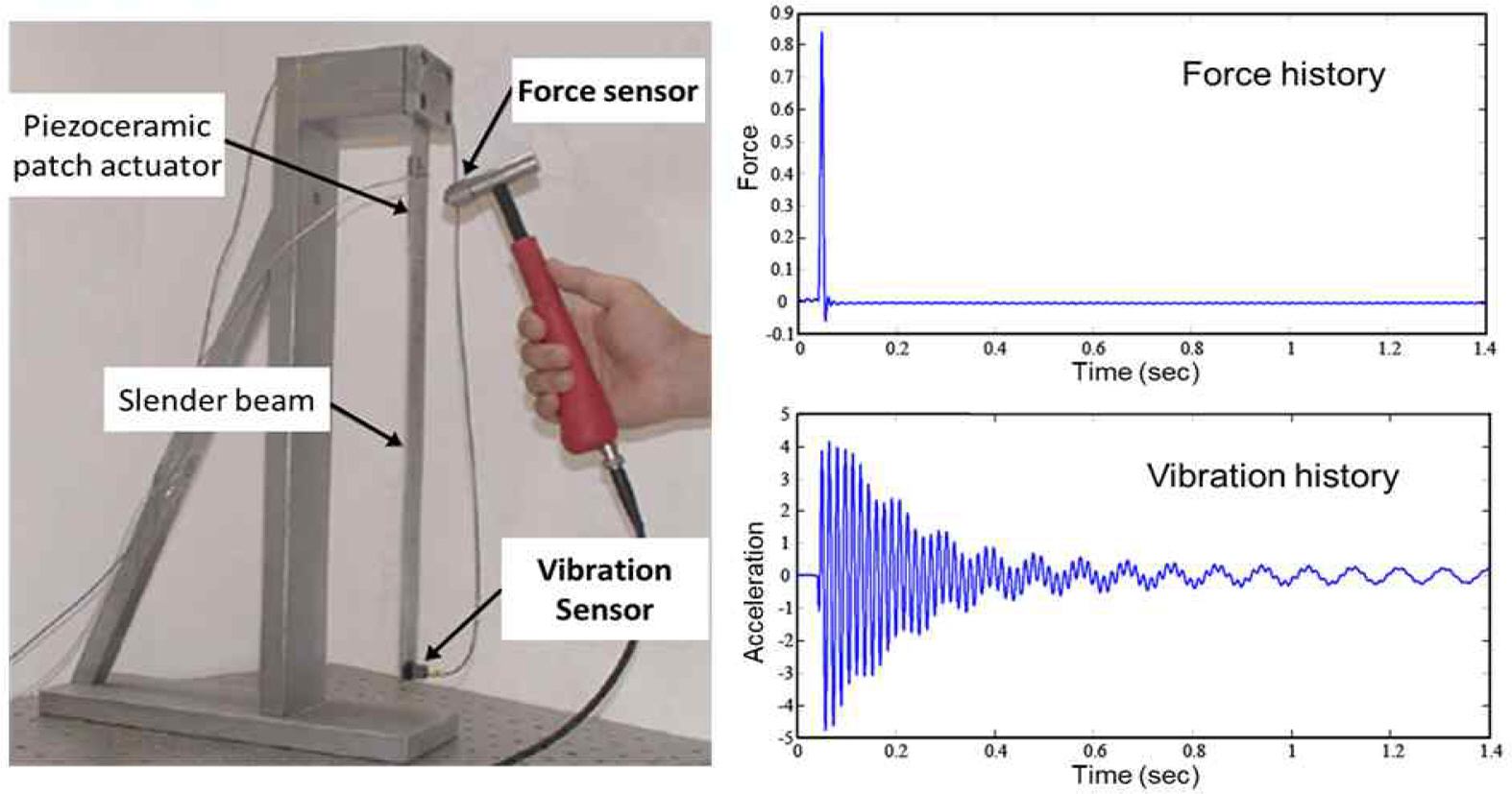
мҷёл¶Җ н•ҳмӨ‘ лҳҗлҠ” кі мһҘм—җ мқҳн•ң мқ‘лӢө мӢ нҳёлҠ” мЎ°нҷ” нҠ№м„ұмқ„ к°Җм§Җл©°, мӢңк°„м—җ л”°лқј м„ н–ү к°’кіј нӣ„н–ү к°’мқҙ мў…мҶҚм Ғ кҙҖкі„лҘј к°Җм§Җкі ліҖнҷ”н•ңлӢӨ. Fig. 2лҠ” м „нҳ•м Ғмқё 충격мӢңн—ҳмңјлЎң 충격мқҙ к°Җн•ҙ진 мқҙнӣ„ л°ңмғқлҗҳлҠ” мқ‘лӢөмқҳ лҢҖн‘ңм Ғмқё мӮ¬лЎҖлҘј ліҙмқё кІғмқҙлӢӨ. кі мһҘ л°ңмғқ мқҙнӣ„м—җ кі„мёЎлҗҳлҠ” мӢңкі„м—ҙлҸ„ мң„мҷҖ к°ҷмқҙ мӢңк°„ мў…мҶҚм„ұмқ„ к°Җ진лӢӨкі ліј мҲҳ мһҲлӢӨ. л”°лқјм„ң, 진лҸҷ мӢ нҳёлҠ” нҠ№м • мҲңк°„мқҙ м•„лӢҢ мқјм • мӢңк°„ к°„кІ©мңјлЎң л¶„н• н•ҳм—¬ мӢңк°„ к°„кІ© лӮҙмқҳ нҶөкі„м Ғ мқёмһҗлҘј мӮ¬мҡ©н•ҳкұ°лӮҳ, л¶„н• лҗң мӣҗ мӢ нҳёмқҳ мӢңкі„м—ҙмқ„ мқёкіөм§ҖлҠҘ н•ҷмҠөм—җ мқҙмҡ©н• н•„мҡ”к°Җ мһҲлӢӨ.
3. мқҙмғҒк°җм§Җ л°Ҹ кі мһҘ진лӢЁ лӘЁлҚё
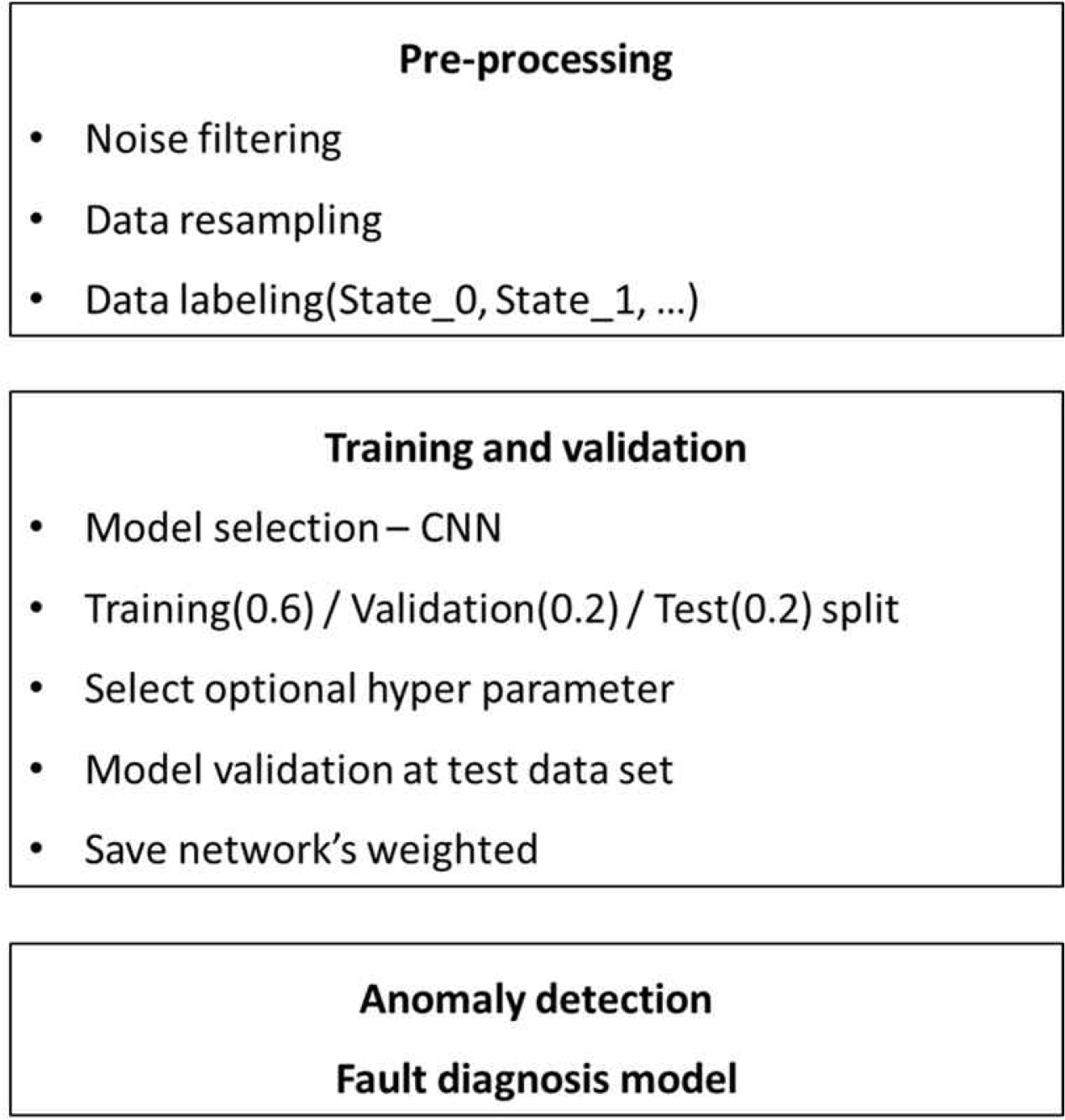
мқҙмғҒ л°Ҹ кі мһҘмқ„ к°җм§Җн•ҳкё° мң„н•ң м Ҳм°ЁлҠ” Fig. 3м—җ мҡ”м•Ҫн•ҳмҳҖлӢӨ. лЁјм Җ кі„мёЎлҗң лҚ°мқҙн„°мқҳ мһЎмқҢмқ„ м ңкұ°н•ҳкі , мҡҙм „мғҒнғң лі„лЎң мӢ нҳёлҘј 분лҘҳн•ҳлҠ” м „мІҳлҰ¬лҘј мҲҳн–үн•ҳмҳҖлӢӨ. к·ёлҰ¬кі мӢңк°„ мў…мҶҚм„ұмқ„ л°ҳмҳҒн•ҳлҸ„лЎқ Conv1D л°Ҹ лӢӨмёөмӢ кІҪл§қ(MLP: Multi-layer perceptron)мқ„ кІ°н•©н•ң м Ғмёө лӘЁлҚёмқ„ мғқм„ұн•ҳмҳҖлӢӨ. л§Ҳм§Җл§үмңјлЎң 분лҘҳлҗң м¶ңл Ҙ кІ°кіјлҘј нҷ•мқён• мҲҳ мһҲлҸ„лЎқ мқҙмғҒ л°Ҹ кі мһҘ진лӢЁ лӘЁлҚёмқ„ кө¬м„ұн•ҳмҳҖлӢӨ.
3.1 лҚ°мқҙн„° м „мІҳлҰ¬ кіјм •
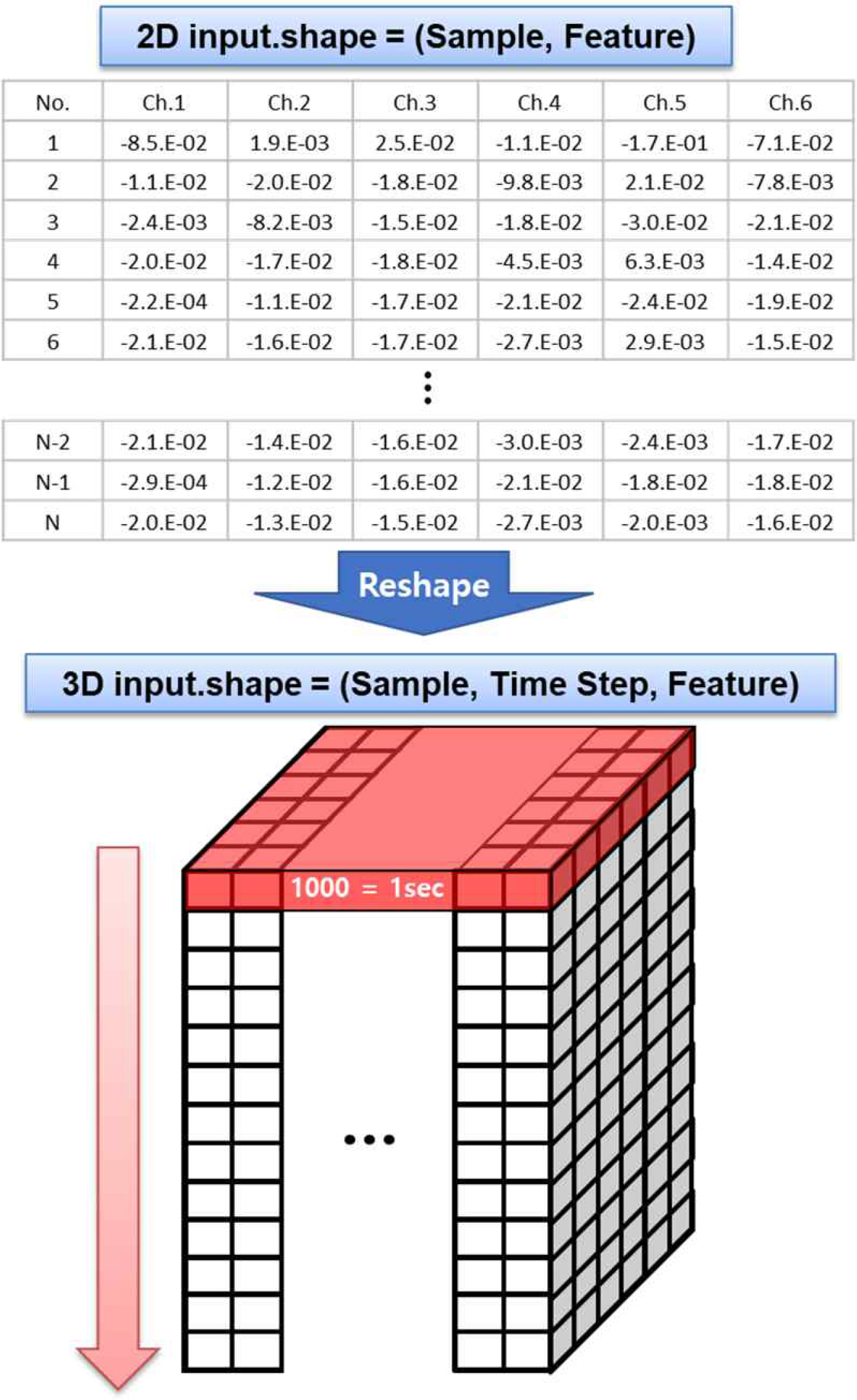
мӢ нҳёмқҳ мёЎм • мЈјкё°лҠ” 25.6 kHzмқҙл©°, кі„мёЎлҗң лҚ°мқҙн„°лҠ” м•Ҫ 600GBлЎң м ҖмһҘлҗҳм—ҲлӢӨ. м „мӮ°кё°мқҳ л©”лӘЁлҰ¬ мҡ©лҹүмқҙ лӘЁл“ лҚ°мқҙн„°лҘј мІҳлҰ¬н•ҳкё° л¶Ҳк°ҖлҠҘн•ҳлҜҖлЎң, мғҳн”Ңл§Ғ мЈјкё°лҘј лӮ®м¶° н•ҷмҠө нҡЁмңЁм„ұмқ„ лҶ’мҳҖлӢӨ. мғҳн”Ңл§Ғ мЈјкё°лҠ” мөңлҢҖ к°ҖлҸҷ RPMмқё 155 Hz ліҙлӢӨ лҶ’мқҖ 1.0 kHzлЎң Resampling н•ҳмҳҖлӢӨ. мӢ нҳёмқҳ LeakageлҘј мөңмҶҢнҷ”н•ҳкё° мң„н•ҙ н•ҙл°Қ мңҲлҸ„мҡ°(Hamming window)лҘј м Ғмҡ©н•ҳмҳҖмңјл©°, м—җмқјлҰ¬м–ҙмӢұ(Aliasing)мқ„ л°©м§Җн•ҳкё° мң„н•ҙ кі мЈјнҢҢ мҳҒм—ӯмқҳ лҚ°мқҙн„°м—җ лЎңмҡ° нҢЁмҠӨ н•„н„°(Low pass filter)лҘј м Ғмҡ©н•ҳмҳҖлӢӨ. Resamplingлҗң лҚ°мқҙн„°мқҳ м•Ңкі лҰ¬мҰҳ 분м„қ к°„кІ©(Segment) лҳҗн•ң 0.001мҙҲ мқҙлҜҖлЎң мғҒнғң 진лӢЁ мЈјкё°к°Җ л§Өмҡ° 짧아 кі мһҘ 분лҘҳмқҳ м •нҷ•м„ұмқҙ л–Ём–ҙм§Ҳ мҲҳ мһҲлӢӨ. л”°лқјм„ң, Fig. 4мҷҖ к°ҷмқҙ кё°мЎҙмқҳ 2м°Ёмӣҗ н–үл ¬ [Sample, Feature]мқ„ к°Ғ 1 мҙҲм—җ н•ҙлӢ№н•ҳлҠ” 1,000к°ңмқҳ лҚ°мқҙн„°лЎңмҚЁ 3м°Ёмӣҗ н–үл ¬ [Sample, Time step, Feature]лЎң мһ¬л°°м№ҳн•ҳмҳҖлӢӨ. мқҙлҘј нҶөн•ҙ н•ҷмҠөм—җ мӮ¬мҡ©лҗҳлҠ” лҚ°мқҙн„°мқҳ мӢңк°„ мҳҒм—ӯмқ„ нҷ•лҢҖн•ҳлҠ” нҡЁкіјлҘј м–»мқ„ мҲҳ мһҲлӢӨ. лӢЁ, м°Ёмӣҗмқ„ нҷ•мһҘн•ЁмңјлЎңмҚЁ мғҳн”Ң к°ңмҲҳлҠ” кё°мЎҙ 2м°Ёмӣҗ л°°м—ҙм—җ 비н•ҙ 1/1000лЎң к°җмҶҢн•ҳмҳҖлӢӨ. кІ°кіјм ҒмңјлЎң кё°мЎҙ 2м°Ёмӣҗ лӘЁлҚём—җм„ң лҚ°мқҙн„°к°Җ [1, 6]мқҳ л°°м—ҙлЎң 0.001мҙҲм—җ н•ҙлӢ№н•ҳлҠ” лҚ°мқҙн„°к°Җ мһ…л Ҙлҗҳм—Ҳм§Җл§Ң, 3м°Ёмӣҗ л°°м—ҙм—җм„ңлҠ” [1000, 6]мқҳ нҒ¬кё°лЎң мҙқ 1мҙҲм—җ н•ҙлӢ№н•ҳлҠ” 진лҸҷ лҚ°мқҙн„°к°Җ мһ…л ҘлҗңлӢӨ. л”°лқјм„ң, 2м°Ёмӣҗ л°°м—ҙмқ„ 3м°Ёмӣҗ л°°м—ҙлЎң нҷ•мһҘн•ЁмңјлЎңмҚЁ 1мҙҲ лҸҷм•Ҳ лӘЁл“ лҚ°мқҙн„°лҘј мғҒнғң 진лӢЁм—җ мӮ¬мҡ©н• мҲҳ мһҲмңјл©°, 1мҙҲ лҸҷм•Ҳмқҳ мӢңк°„ мў…мҶҚм„ұмқ„ н•ҷмҠөм—җ л°ҳмҳҒн•ҳлҸ„лЎқ кі м•Ҳн•ҳмҳҖлӢӨ.
3.2 лҚ°мқҙн„° лқјлІЁл§Ғ
м—¬лҹ¬ мў…лҘҳмқҳ мғҒнғң 진лӢЁмқҖ лӢӨмӨ‘ 분лҘҳ(Multi Classification) лӘЁлҚёлЎң кө¬нҳ„н•ҳм—¬м•ј н•ҳлҜҖлЎң, к°Ғ мғҒнғңлҘј лӮҳнғҖлӮҙлҠ” лқјлІЁ(Label)мқ„ н•ҷмҠө лӘ©н‘ң к°’мңјлЎң м§Җм •н•ҳмҳҖлӢӨ. Table 2мҷҖ к°ҷмқҙ нҺҢн”„лҠ” мҙқ 12к°Җм§Җмқҳ мғҒнғңлЎң 분лҘҳн•ҳмҳҖмңјл©°, мІӯм •кё°лҠ” Table 3м—җ м •лҰ¬н•ң кІғкіј к°ҷмқҙ мҙқ 10к°Җм§Җмқҳ мғҒнғңлЎң 분лҘҳн•ҳм—¬ к°Ғ мғҒнғңлі„лЎң м •мҲҳ к°’мқ„ л¶Җм—¬н•ҳмҳҖлӢӨ. мһҘ비мқҳ мЈјмҡ” кі мһҘ мӮ¬лЎҖлҘј мЎ°мӮ¬н•ҳкі кІ°н•ЁмҲҳ 분м„қмқ„ мҲҳн–үн•ҳм—¬ н•өмӢ¬ кі мһҘ мў…лҘҳлҘј м„ м •н•ҳмҳҖлӢӨ. м„ м •н•ң н•өмӢ¬ кі мһҘ лі„лЎң лқјлІЁмқ„ л¶Җм—¬н•ҳмҳҖлӢӨ(Lee et al., 2022). лқјлІЁмқҖ лҚ°мқҙн„°мқҳ н–ү лі„лЎң мһ…л Ҙлҗҳм§Җл§Ң, мӣҗ лҚ°мқҙн„°лҘј 2м°Ёмӣҗм—җм„ң 3м°ЁмӣҗмңјлЎң нҷ•мһҘн•ҳмҳҖкё° л•Ңл¬ём—җ кё°мЎҙ л°©мӢқмңјлЎңлҠ” лқјлІЁмқ„ мһ…л Ҙн•ҳкё°к°Җ л¶Ҳк°ҖлҠҘн•ҳлӢӨ. л”°лқјм„ң, лҚ°мқҙн„°мқҳ м°Ёмӣҗмқ„ нҷ•мһҘн•ң мқҙнӣ„м—җ к°Ғ мғҒнғңм—җ н•ҙлӢ№н•ҳлҠ” лқјлІЁмқ„ 1м°ЁмӣҗмңјлЎң мһ…л Ҙн•ҳмҳҖлӢӨ.
3.3 Conv1D лӘЁлҚём—җм„ң мӢңк°„ мў…мҶҚм„ұ л°ҳмҳҒ
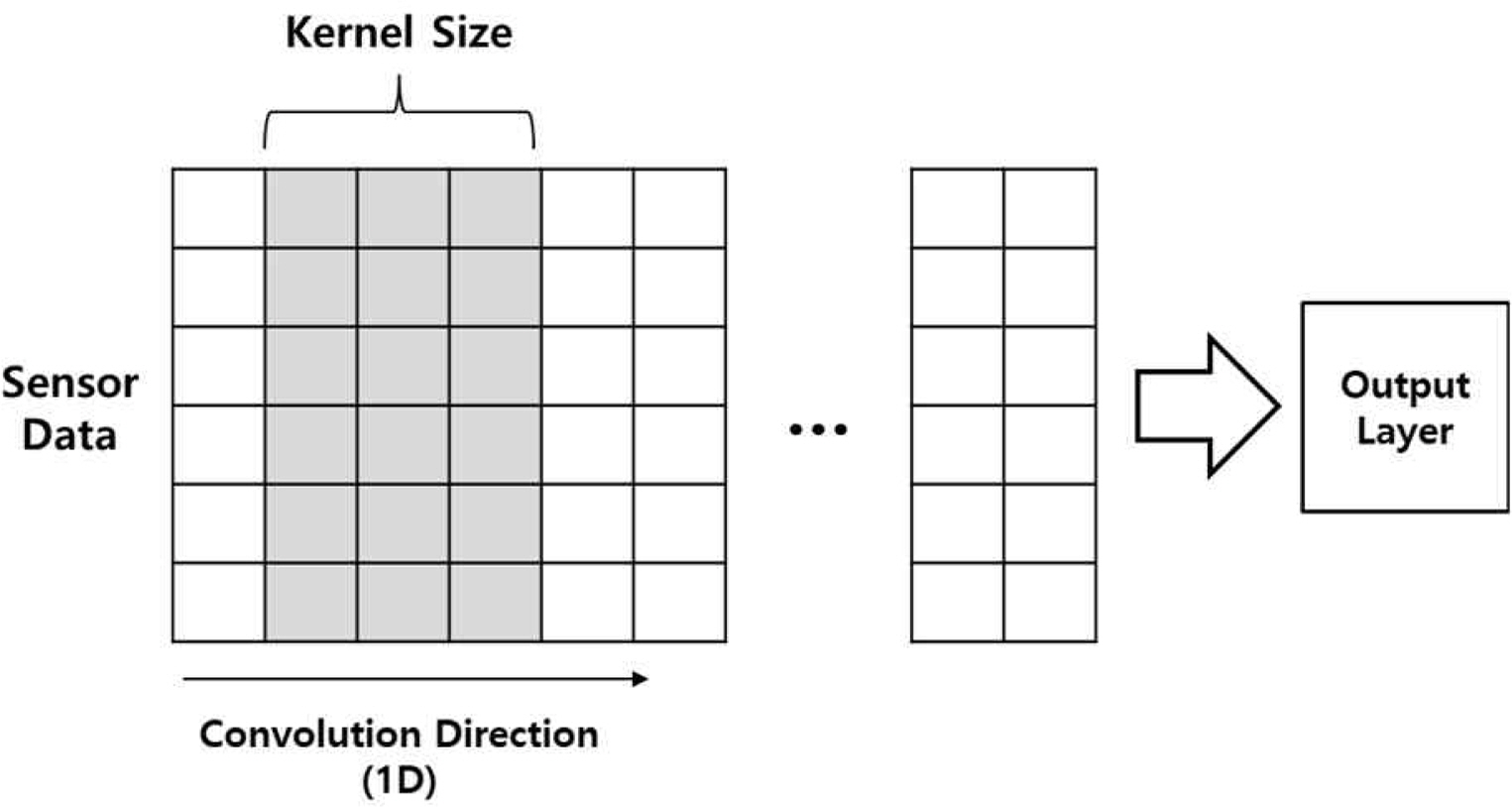
CNNмқҖ мҳҒмғҒ лҚ°мқҙн„°лҘј мІҳлҰ¬н• л•Ң мқјл°ҳм ҒмңјлЎң мӮ¬мҡ©лҗҳлҠ” н•©м„ұкіұ кё°л°ҳмқҳ мӢ¬мёөн•ҷмҠө лӘЁлҚёмқҙлӢӨ. мҳҒмғҒмқҖ к°Ғ н”Ҫм…Җмқҳ мң„м№ҳмҷҖ RGB м •ліҙлҘј к°Җм§Җкі мһҲкё° л•Ңл¬ём—җ 3м°Ёмӣҗ н–үл ¬лЎң н‘ңнҳ„лҗңлӢӨ. кё°мЎҙ лӘЁлҚёл“Өмқҳ мһ…л Ҙ мӢңнҖҖмҠӨлҠ” 1м°Ёмӣҗ л°°м—ҙлЎң м ңн•ңлҗҳм–ҙ мҳҒмғҒ лҚ°мқҙн„°м—җм„ң мң„м№ҳм—җ лҢҖн•ң м •ліҙлҘј л°ҳмҳҒн•ҳкё°к°Җ л¶Ҳк°ҖлҠҘн•ҳлӢӨ. л°ҳл©ҙм—җ CNNмқҖ мӣҗ лҚ°мқҙн„°мқҳ нҠ№м„ұмқ„ мҶҗмӢӨн•ҳм§Җ м•ҠмңјлҜҖлЎң лҶ’мқҖ м„ұлҠҘмқ„ м–»мқ„ мҲҳ мһҲлӢӨ (Kattenborn et al., 2021). лҳҗн•ң, CNNмқҖ н•©м„ұкіұ л§ҢмңјлЎң лҚ°мқҙн„°мқҳ мҲңм„ң м •ліҙлҘј мң м§Җн•ңмІҙ нҠ№м„ұмқ„ 추м¶ңн•ҳкё° л•Ңл¬ём—җ мӢңкі„м—ҙ 분м„қм—җм„ңлҸ„ лҶ’мқҖ м„ұлҠҘмқ„ ліҙм—¬ мӨҖлӢӨ(Zhang and Wallace, 2015; Zhao et al., 2019). нҠ№нһҲ, CNN лӘЁлҚё мӨ‘ м—°мӮ° л°©н–Ҙмқҙ 1м°ЁмӣҗмңјлЎң м ңн•ңлҗң Conv1Dмқҳ мҠ¬лқјмқҙл”© мңҲлҸ„мҡ° м—°мӮ° кё°лІ•мқҖ мӢңк°„ мҲңм„ңлҢҖлЎң 분лҘҳлҗң лҚ°мқҙн„°лҘј лҢҖмғҒмңјлЎң кіјкұ° к°’мқ„ л°ҳмҳҒн•ҳм—¬ лӢӨмқҢ мӢңм җ к°’мқ„ мҳҲмёЎн•ҳлҠ” л°©лІ•мқҙлӢӨ(Yahmed et al., 2015; Chou et al., 2018). мҰү, Conv1D лӘЁлҚём—җм„ң мҠ¬лқјмқҙл”© мңҲлҸ„мҡ° л°©лІ•мқ„ н•©м„ұкіұ м—°мӮ°мңјлЎң л°ҳмҳҒн•ҳм—¬ мӢңкі„м—ҙмқҳ нҠ№м„ұмқ„ н•ҷмҠөн• мҲҳ мһҲлӢӨ. Fig. 5м—җ Conv1Dмқҳ мҠ¬лқјмқҙл”© м—°мӮ°мқ„ н‘ңнҳ„н•ҳмҳҖлӢӨ.
мӢңк°„ мў…мҶҚм„ұмқ„ н‘ңнҳ„н•ҳлҠ” мӢңк°„ к°„кІ©мқҖ мңҲлҸ„мҡ° нҒ¬кё°м—җ л”°лқј лӢ¬лқјм§Җл©° Conv1D лӘЁлҚём—җм„ңлҠ” Box filterмқҳ нҒ¬кё°к°Җ к·ё м—ӯн• мқ„ лҢҖмІҙн•ңлӢӨ. Box filterмқҳ нҒ¬кё°лҘј кІ°м •м§“лҠ” нҢҢлқјлҜён„°лҠ” Kernel sizeмқҙл©°, мқҙм—җ л”°лқј мңҲлҸ„мҡ°мқҳ нҒ¬кё°к°Җ кІ°м •лҗҳкІҢ лҗңлӢӨ. мҰү, Conv1D лӘЁлҚём—җм„ң Kernel sizeм—җ л”°лқј мӢңк°„ мў…мҶҚм„ұ л°ҳмҳҒ кёёмқҙлҘј мЎ°м Ҳн• мҲҳ мһҲлӢӨ(Agrawal and Mittal, 2020). л”°лқјм„ң ліё м—°кө¬лҠ” мӣҗ м •ліҙмқҳ ліҖнҳ•мқҙ м—ҶлҠ” CNNмқҳ мһҘм җмқҙ 1м°Ёмӣҗ мӢңкі„м—ҙм—җлҸ„ нҷңмҡ©лҗ мҲҳ мһҲмқ„ кІғмңјлЎң нҢҗлӢЁн•ҳмҳҖлӢӨ. лӢӨл§Ң, Conv1D лӘЁлҚём—җм„ң Kernel sizeк°Җ к°ҖмһҘ мӨ‘мҡ”н•ң ліҖмҲҳлЎң мөңм Ғ к°’мқ„ м°ҫмқ„ н•„мҡ”к°Җ мһҲлӢӨ.
3.4 кі мһҘ 진лӢЁ м•Ңкі лҰ¬мҰҳмқҳ кө¬мЎ°
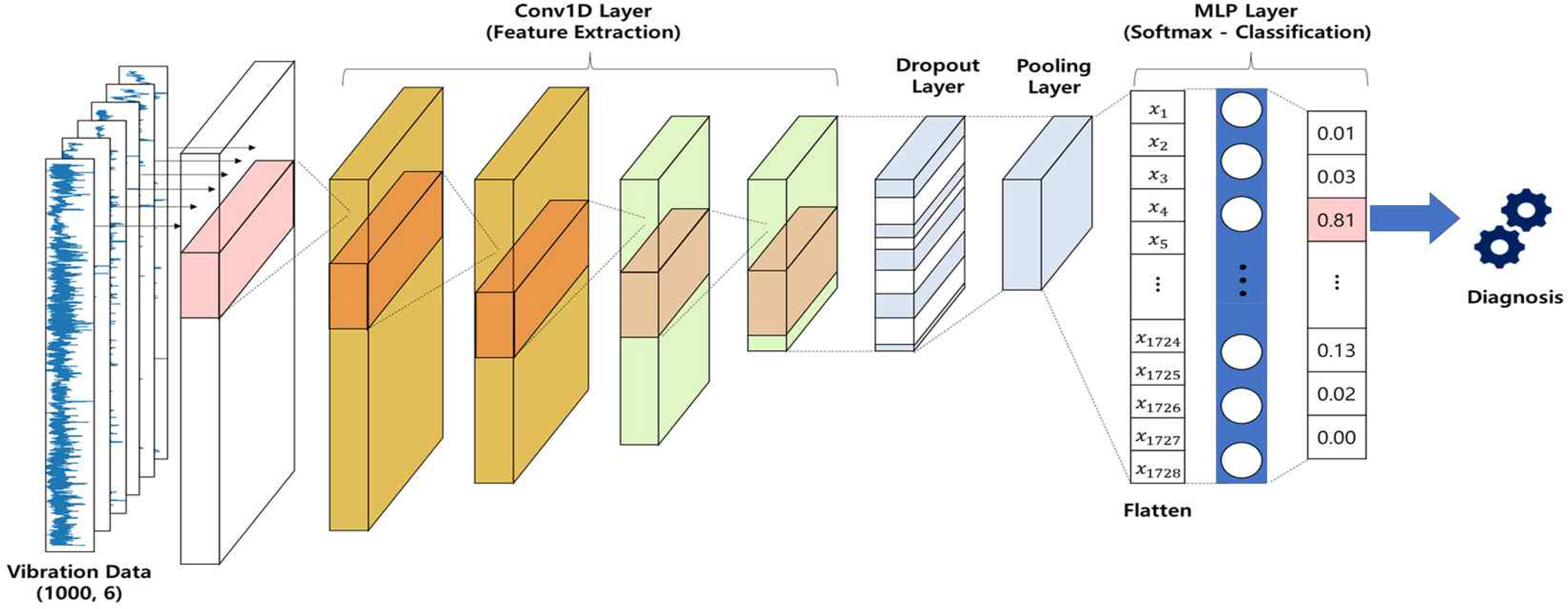
м•һ м Ҳм—җм„ң м–ёкёүн•ң л°”мҷҖ к°ҷмқҙ Conv1Dмқҳ лӘЁлҚёмқҖ Box filterлҘј мқҙмҡ©н•ң мҠ¬лқјмқҙл”© мңҲлҸ„мҡ° кё°лІ•мқ„ м Ғмҡ©н•ҳм—¬ мӢңк°„ мў…мҶҚм„ұмқ„ н•ҷмҠөм—җ л°ҳмҳҒн• мҲҳ мһҲлӢӨ. ліё м—°кө¬лҠ” мӢңкі„м—ҙ лҚ°мқҙн„°мқҳ мӢңк°„ мў…мҶҚм„ұмқ„ мң м§Җн•ң мұ„лЎң лҚ°мқҙн„°мқҳ нҠ№м„ұмқ„ н•ҷмҠөн•ҳлҠ” Conv1D кі„мёөкіј кІ°м •мқ„ лӮҙлҰ¬лҠ” Dense кі„мёөмңјлЎң 분лҘҳн•ҳм—¬ мҷ„м „ м—°кІ° л„ӨнҠёмӣҢнҒ¬(Fully connected network)лЎң н•ҷмҠө лӘЁлҚёмқ„ кө¬м„ұн•ҳмҳҖлӢӨ. мӢ¬мёөн•ҷмҠө лӘЁлҚёмқҳ кі„мёө кө¬м„ұмқҖ мһ…л Ҙ кі„мёө(Input layer), лҚ°мқҙн„° нҠ№м„ұмқ„ н•ҷмҠөн•ҳлҠ” мқҖлӢү кі„мёө(Hidden layer), м—°мӮ° кІ°кіјлҘј м¶ңл Ҙн•ҳлҠ” кі„мёө(Output layer)мңјлЎң лӮҳлүңлӢӨ (Sharma et al., 2018). мқҖлӢү кі„мёөмқҖ мһ…л Ҙ кі„мёөкіј м¶ңл Ҙ кі„мёөк°„ кҙҖкі„лҘј кө¬м„ұн•ҳлҠ” мЈјлҗң н•ҷмҠө мҳҒм—ӯмқҙлӢӨ. Conv1D лӘЁлҚёмқҳ мқҖлӢү кі„мёөмқ„ кө¬м„ұн•ҳлҠ” мЈјмҡ” мҙҲл§Өк°ңліҖмҲҳлҠ” Kernel size, Stride л°Ҹ Filterмқҳ к°ңмҲҳ л“ұмқҙ мһҲлӢӨ. Kernel sizeлҠ” Box filterмқҳ нҒ¬кё° л°Ҹ мӢңк°„ мҳҒм—ӯмқҳ нҒ¬кё°лҘј кІ°м •н•ҳлҜҖлЎң, мӢңк°„ мў…мҶҚм„ұмқ„ мЎ°м Ҳн•ҳлҠ” мЈјмҡ” мҙҲл§Өк°ңліҖмҲҳлЎң мӮ¬мҡ©н•ҳмҳҖлӢӨ. StrideлҠ” Box filterмқҳ м—°мӮ° к°„кІ©мқ„ мЎ°м •н•ҳлҠ” мҙҲл§Өк°ңліҖмҲҳлЎң м¶ңл Ҙ кі„мёөмқҳ кёёмқҙлҘј кІ°м •н•ҳл©°, к·ё к°’мқҙ мҰқк°Җн• мҲҳлЎқ м¶ңл Ҙ кі„мёөмқҳ кёёмқҙлҠ” кёүкІ©н•ҳкІҢ к°җмҶҢн•ңлӢӨ. Filterмқҳ к°ңмҲҳлҠ” нҷңм„ұнҷ” н•ЁмҲҳм—җ мқҳн•ҙ кі„мӮ°лҗҳм–ҙ лӢӨмқҢ л Ҳмқҙм–ҙм—җ м „лӢ¬лҗҳлҠ” л…ёл“ңмқҳ мҲҳлҘј кІ°м •н•ҳм§Җл§Ң, л„Ҳл¬ҙ нҒ° к°’мқҙл©ҙ лӘЁлҚёмқҳ ліөмһЎм„ұмқҙ мҰқк°Җлҗҳм–ҙ кіјм Ғн•©(Overfitting)мқ„ мң л°ңн•ңлӢӨ. л”°лқјм„ң мөңм Ғнҷ” кіјм •мқ„ кұ°міҗ мҙҲл§Өк°ңліҖмҲҳ к°’мқ„ кІ°м •н•ҳмҳҖлӢӨ. мһ…л Ҙ кі„мёөмқҳ лҚ°мқҙн„°лҠ” 6к°ңмқҳ м„јм„ңм—җм„ң 1.0 kHzмқҳ кі„мёЎ мЈјкё°лЎң 1 мҙҲк°„ мёЎм •н•ң (1000, 6) л°°м—ҙмқҙ мһ…л ҘлҗңлӢӨ. мһ…л Ҙ лҚ°мқҙн„°лҠ” мқҖлӢү кі„мёөм—җм„ң Kernel sizeмҷҖ Strideм—җ л”°лқј мӢңк°„ мў…мҶҚм„ұмқ„ л°ҳмҳҒн•ҳм—¬ лҚ°мқҙн„°мқҳ нҠ№м„ұмқ„ н•ҷмҠөн•ҳлҸ„лЎқ н•ҳмҳҖлӢӨ. кі„мёө к°ңмҲҳмҷҖ мһ…л Ҙ лҚ°мқҙн„°мқҳ л°°м—ҙ, Kernel size, Stride, Filterмқҳ нҒ¬кё°м—җ л”°лқј м—°мӮ°м—җ н•„мҡ”н•ң к°ҖмӨ‘м№ҳмқҳ к°ңмҲҳк°Җ кІ°м •лҗҳлҠ”лҚ°, к°ҖмӨ‘м№ҳмқҳ к°ңмҲҳк°Җ м§ҖлӮҳм№ҳкІҢ л§Һмқ„ кІҪмҡ°м—җлҠ” кІ°кіјмқҳ кіјм Ғн•©мқҙ мқјм–ҙлӮ нҷ•лҘ мқҙ лҶ’아진лӢӨ(Wu and Gu, 2015). л”°лқјм„ң, Pooling кі„мёөкіј Dropout кі„мёөмқ„ мӮ¬мҡ©н•ҳм—¬ кіјм Ғн•©мқ„ л°©м§Җн•ҳмҳҖлӢӨ. мқҙнӣ„, Conv1D кі„мёөмқҙ н•ҷмҠөн•ң нҠ№м„ұк°’мқ„ Flatten layerлЎң мҷ„м „ м—°кІ°н•ҳкі , нҷңм„ұнҷ” н•ЁмҲҳлЎң SoftmaxлҘј к°Җ진 MLP кі„мёөм—җм„ң кі мһҘ мў…лҘҳлҘј кІ°м •н•ҳлҸ„лЎқ кө¬м„ұн•ҳмҳҖлӢӨ. Fig. 6м—җ к°Ғ м Ғмёөкіј 진лӢЁ м Ҳм°ЁлҘј м„ӨлӘ…н•ҳмҳҖлӢӨ.
3.5 мҙҲл§Өк°ңліҖмҲҳ(Hyper parameter) кІ°м •
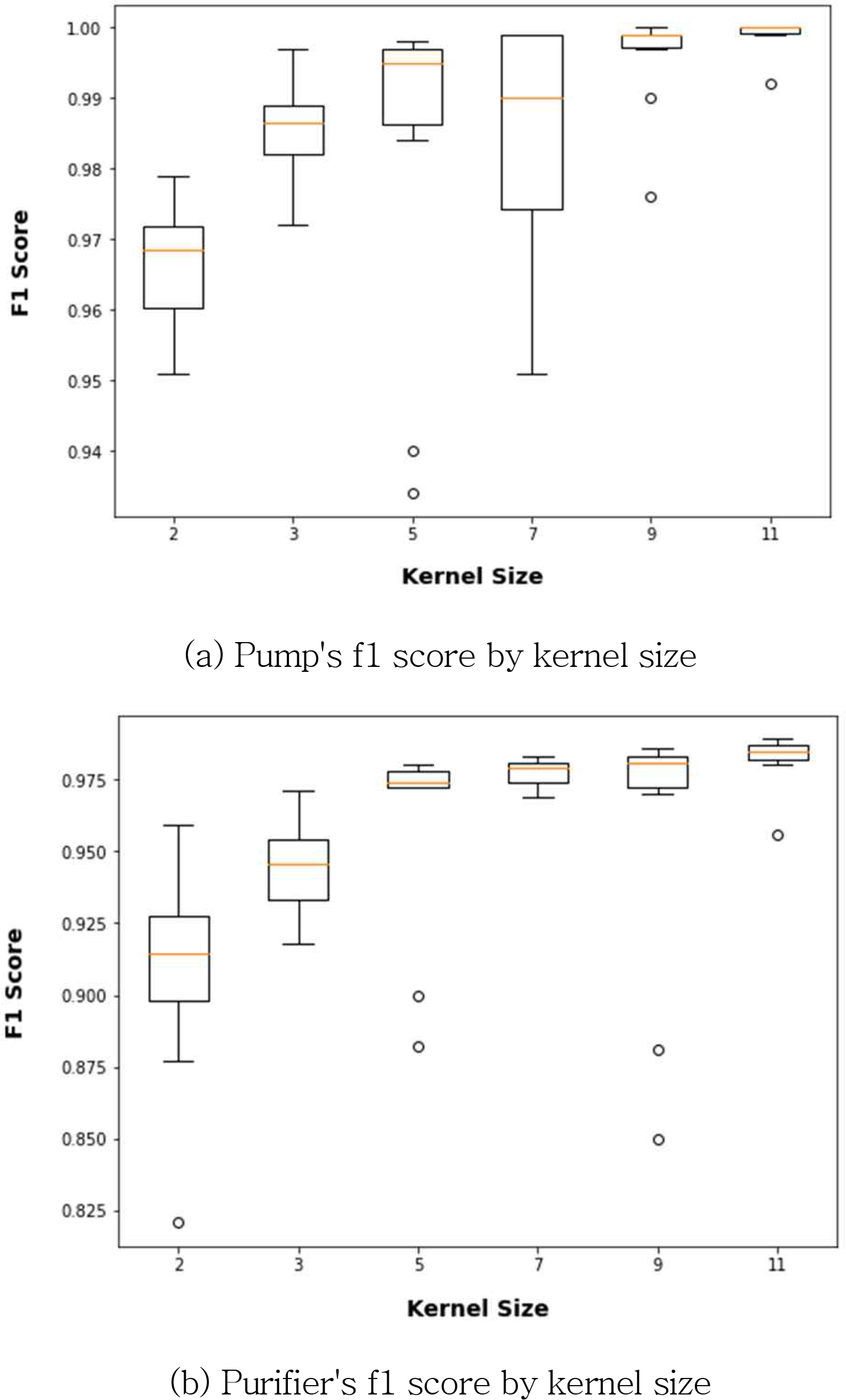
м—¬лҹ¬ кІҪмҡ°мқҳ мҲҳлҘј лҢҖмһ…н•ҳм—¬ 비көҗн•ҳлҠ” к·ёлҰ¬л“ң нғҗмғү л°©лІ•мқ„ мӮ¬мҡ©н•ҳм—¬ мөңм Ғмқҳ мҙҲл§Өк°ңліҖмҲҳлҘј кІ°м •н•ҳмҳҖлӢӨ(Tran, 2021). мӢңкі„м—ҙмқҳ нҠ№м„ұ н•ҷмҠөм—җм„ң к°ҖмһҘ мӨ‘мҡ”н•ң мҙҲл§Өк°ңліҖмҲҳлҠ” Kernel sizeмқҙкё° л•Ңл¬ём—җ Kernel sizeлҘј Table 4 мҷҖ к°ҷмқҙ лӢ¬лҰ¬н•ҳм—¬ н•ҷмҠөмқ„ 진н–үн•ҳмҳҖлӢӨ. к·ёлҰ¬л“ң нғҗмғүмқҖ 10 epochsлҸҷм•Ҳ н•ҷмҠөн•ҳкі мөңм Ғмқҳ мҙҲл§Өк°ңліҖмҲҳлҘј кі„мӮ°н•ҳмҳҖлӢӨ. лӢӨл§Ң, лӮ®мқҖ epochsмңјлЎң н•ҷмҠөн• л•Ң л°ңмғқлҗҳлҠ” л¬ём ңлЎң мҙҲкё°к°’м—җ мқҳн•ң Local minimumм—җ н•ҙлӢ№н•ҳлҠ” мҳӨлҘҳлҘј л°°м ңн•ҳкё° мң„н•ҙ мҙқ н•ҷмҠө кіјм •мқ„ 10лІҲ л°ҳліөн•ҳмҳҖлӢӨ. л”°лқјм„ң, к·ёлҰ¬л“ң нғҗмғү кіјм •м—җм„ң мҙқ 6к°Җм§Җ Kernel sizeм—җ лҢҖн•ҙ 10 epochsмқҳ н•ҷмҠөмқ„ мҙқ 10лІҲ л°ҳліөн•ҳмҳҖлӢӨ. н•ҷмҠө кІ°кіјлҠ” F1 scoreлҘј кё°мӨҖмңјлЎң нҢҗлӢЁн•ҳмҳҖмңјл©°, Fig. 7кіј к°ҷмқҙ 4분мң„м—җ л”°лқј лҚ°мқҙн„°лҘј 분лҘҳн•ҳл©° мӨ‘м•ҷк°’кіј мқҙмғҒм№ҳ(Outlier)лҘј лӘЁл‘җ ліҙм—¬мЈјлҠ” мғҒмһҗ мҲҳм—ј к·ёлҰј(Box-whisker plot)мңјлЎң 비көҗн•ҳмҳҖлӢӨ. 6к°Җм§Җ мҙҲл§Өк°ңліҖмҲҳмӨ‘ к°ҖмһҘ мўӢмқҖ м„ұлҠҘмқ„ ліҙмқҙлҠ” Kernel sizeмқҳ к°’мқҖ нҺҢн”„мҷҖ мІӯм •кё° лӘЁл‘җ 11лЎң кі„мӮ°лҗҳм—ҲлӢӨ.
3.6 Conv1Dмқҳ кі„мёЎ кө¬м„ұ кІ°кіј
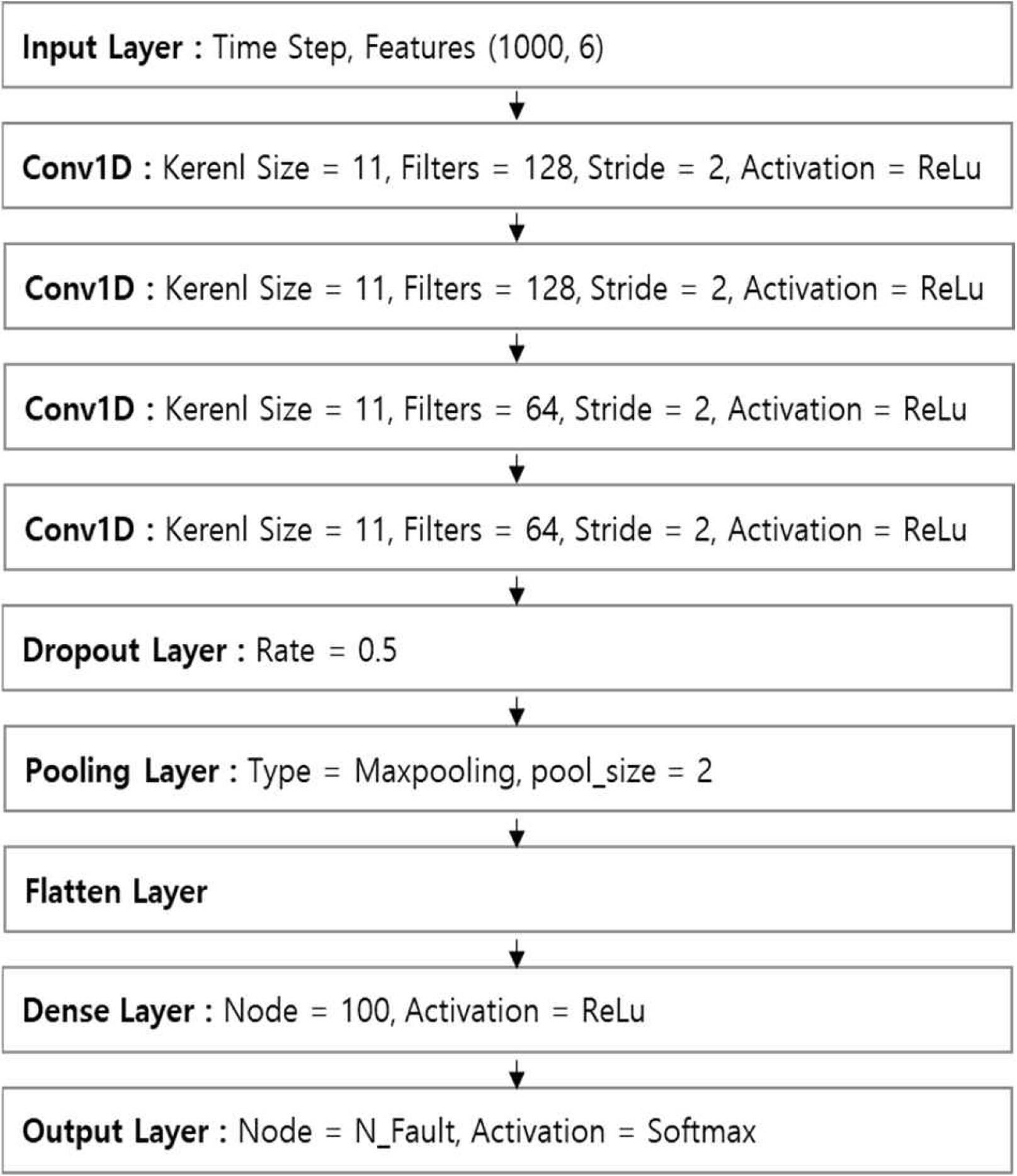
м•һ м Ҳмқҳ мөңм Ғнҷ” кіјм •мқ„ кұ°міҗ Fig. 8кіј к°ҷмқҙ кі„мёөмқ„ кө¬м„ұн•ҳмҳҖлӢӨ. л„Ө к°ң кі„мёөмқҳ Conv1D layerмҷҖ кіјм Ғн•©мқ„ л°©м§Җн•ҳкё° мң„н•ң Dropout layerл°Ҹ Pooling layerлҘј кө¬м„ұн•ҳмҳҖлӢӨ. мқҙнӣ„, Flatten layerлЎң мҷ„м „ м—°кІ°н•ҳмҳҖмңјл©° лӢӨмқҢмқҳ л‘җк°ң кі„мёөмңјлЎң кө¬м„ұлҗң Dense layerм—җм„ң лӘ©н‘ң м¶ңл Ҙк°’мқё мһҘ비 мғҒнғңлҘј м¶ңл Ҙн•ҳлҠ” лӘЁлҚёмқ„ к°Җм§ҖлҸ„лЎқ н•ҳмҳҖлӢӨ. лҚ°мқҙн„°мқҳ мғҳн”Ң мҲҳлҠ” нҺҢн”„мҷҖ мІӯм •кё°к°Җ к°Ғк°Ғ м•Ҫ 10л§Ңк°ңмҷҖ 23л§Ңк°ңмһ„мқ„ кі л Өн•ҳм—¬ Batch sizeлҠ” 512лЎң м§Җм •н•ҳмҳҖлӢӨ.
4. м•Ңкі лҰ¬мҰҳ м Ғмҡ© кІ°кіј
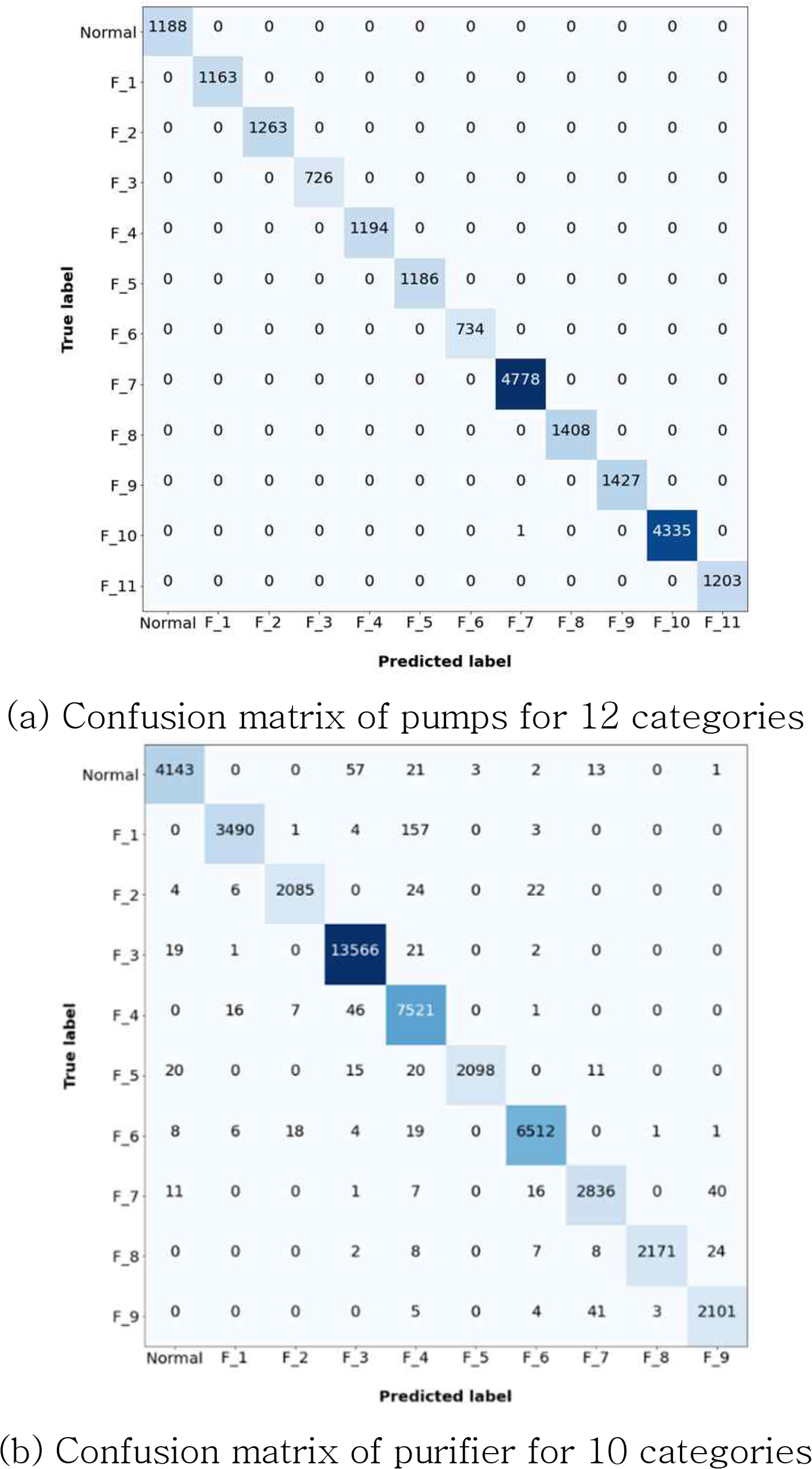
мҙқ 30 epochsмқҳ н•ҷмҠөмқ„ мҲҳн–үн•ҳмҳҖмңјл©°, кІ°кіјлҠ” Table 5 мҷҖ к°ҷлӢӨ. нҺҢн”„мқҳ кІҪмҡ° м •нҷ•лҸ„лҠ” 100% мқҙл©°, F1 ScoreлҠ” 99.99%лЎң мҳӨлҘҳк°Җ кұ°мқҳ м—ҶлҠ” м„ұлҠҘмқ„ ліҙмҳҖлӢӨ. мІӯм •кё°мқҳ м •нҷ•лҸ„лҠ” 99.38% мқҙл©°, F1 ScoreлҠ” 99.41%лЎң кі„мӮ°лҗҳм—ҲлӢӨ. мқҙлҠ” к°Ғ мғҒнғңлҘј лҢҖн‘ңн•ҳлҠ” м„ұлҠҘ м§Җн‘ңк°Җ м•„лӢҢ к°Ғ мғҒнғңлі„ м„ұлҠҘмқҳ л§ҲмқҙнҒ¬лЎң нҸүк· (Micro average) к°’мқҙлҜҖлЎң мғҒнғңлі„лЎң 분лҘҳ лӘЁлҚёмқҳ м„ұлҠҘ нҢҢм•…мқҙ л¶Ҳк°ҖлҠҘн•ҳлӢӨ. л”°лқјм„ң, мғҒнғңлі„ лӘЁлҚёмқҳ 분лҘҳ м„ұлҠҘмқ„ нҸүк°Җн•ҳкё° мң„н•ҙ Fig. 9 мҷҖ к°ҷмқҙ нҳјлҸҲ н–үл ¬(Confusion matrix)лҘј нҷ•мқён•ҳмҳҖлӢӨ. нҺҢн”„лҘј лҢҖмғҒмңјлЎң н•ң нҳјлҸҲ н–үл ¬мқҖ л§ҲмқҙнҒ¬лЎң нҸүк· кіј лҸҷмқјн•ҳкІҢ лӘЁл“ мғҒнғңм—җм„ң лҶ’мқҖ м„ұлҠҘмқ„ ліҙмҳҖлӢӨ. мІӯм •кё°лҘј лҢҖмғҒмңјлЎң н•ң нҳјлҸҷ н–үл ¬ лҳҗн•ң лҢҖмІҙм ҒмңјлЎң лҶ’мқҖ м„ұлҠҘмқ„ ліҙмҳҖм§Җл§Ң, л„Ө лІҲм§ё кі мһҘм—җ н•ҙлӢ№н•ҳлҠ” м—ҙнҷ” мғҒнғңмқҳ Seal л¶Җм°© к°ҖлҸҷ мғҒнғңм—җм„ң л§ҲмқҙнҒ¬лЎң нҸүк· мқҳ 99.38% м •нҷ•лҸ„м—җ 비н•ҙ мғҒлҢҖм ҒмңјлЎң лӮ®мқҖ 96.39% (7521/7803)мқҳ м •нҷ•лҸ„лҘј ліҙмҳҖлӢӨ. Table 5м—җ м•Ңкі лҰ¬мҰҳмқҳ кі мһҘ мҳҲмёЎ м„ұлҠҘмқ„ м •лҰ¬н•ҳмҳҖлӢӨ. кІ°кіјм ҒмңјлЎң м ңмӢңн•ң л°©лІ•мқҙ лҶ’мқҖ м •нҷ•лҸ„лЎң нҺҢн”„мҷҖ мІӯм •кё°мқҳ м •мғҒ л°Ҹ кі мһҘ мғҒнғңлҘј к°җм§Җн• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
5. кІ° лЎ
ліё л…јл¬ёмқҖ 엔진 кі„нҶөмқҳ нҺҢн”„мҷҖ мІӯм •кё°лҘј лҢҖмғҒмңјлЎң кі мһҘ мғҒнғңлҘј 진лӢЁн•ҳкё° мң„н•ң м•Ңкі лҰ¬мҰҳмқ„ м ңмӢңн•ҳмҳҖлӢӨ. м•Ңкі лҰ¬мҰҳмқҙ нҺҢн”„мҷҖ мІӯм •кё°м—җ л¶Җм°©н•ң 진лҸҷ лҚ°мқҙн„°лЎңл¶Җн„° кі мһҘ нҢЁн„ҙмқ„ н•ҷмҠөн•ҳлҸ„лЎқ н•ҳмҳҖлӢӨ. мӮ¬мҡ©лҗң 진лҸҷ лҚ°мқҙн„°лҠ” мӢңк°„ нқҗлҰ„м—җ л”°лқј лҲ„м Ғн•ҳм—¬ мёЎм •лҗҳлҠ” мӢңкі„м—ҙ лҚ°мқҙн„°лЎң мӢңк°„ мў…мҶҚм„ұмқҳ нҠ№м§•мқ„ к°Җ진лӢӨ. мӢңк°„ мў…мҶҚм„ұмқҳ нҠ№м§•мқ„ л°ҳмҳҒн•ҳкё° мң„н•ң л°©м•ҲмңјлЎң CNNкі„м—ҙмқҳ Conv1Dмқ„ мӮ¬мҡ©н•ҳм—¬ н•ҷмҠө лӘЁлҚёмқ„ м ңмӢңн•ҳмҳҖлӢӨ. лҳҗн•ң, 분м„қм—җ мӮ¬мҡ©лҗҳлҠ” лҚ°мқҙн„°мқҳ мӢңк°„ мҳҒм—ӯмқ„ нҷ•лҢҖн•ҳкё° мң„н•ҙ м „мІҳлҰ¬ кіјм •м—җм„ң м°Ёмӣҗмқ„ нҷ•мһҘн•ҳмҳҖлӢӨ. н•ҷмҠөлҗң 분лҘҳ лӘЁлҚёмқҖ нҺҢн”„м—җм„ң лӘЁл“ кі мһҘ мғҒнғңм—җ лҢҖн•ҙ м •нҷ•н•ң мҳҲмёЎ м„ұлҠҘмқ„ ліҙмҳҖлӢӨ. мІӯм •кё° Sealмқҳ м—ҙнҷ” кі мһҘм—җм„ң м•Ҫк°„ лӮ®мқҖ м •нҷ•лҸ„лҘј ліҙмҳҖм§Җл§Ң, к·ё мҷёмқҳ лӘЁл“ мғҒнғңм—җм„ң лҶ’мқҖ м„ұлҠҘмқ„ ліҙмҳҖлӢӨ. кІ°кіјм ҒмңјлЎң мӢңкі„м—ҙ лҚ°мқҙн„°мқҳ нҠ№м„ұмқ„ н•ҷмҠөн•ҳлҠ”лҚ° Conv1D н•ҷмҠөмһҗк°Җ мӢңкі„м—ҙ мў…мҶҚм„ұмқ„ л°ҳмҳҒн• мҲҳ мһҲмңјл©°, м •нҷ•н•ң м„ұлҠҘмңјлЎң кі мһҘмқ„ 진лӢЁн• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






