회전수가 변하는 기기의 고장진단에 있어서 특성 기반 분류와 합성곱 기반 알고리즘의 예측 정확도 비교
Comparison of Prediction Accuracy Between Classification and Convolution Algorithm in Fault Diagnosis of Rotatory Machines at Varying Speed
Article information
Abstract
본 연구는 정상 가동 중에도 회전수가 변하는 기기의 이상 및 고장 진단 방안을 다루고 있다. 회전수가 변함에 따라 비정상적 시계열 특성을 내포한 센서 데이터에 기계학습을 적용할 수 있는 절차를 제시하고자 하였다. 기계학습으로는 k-Nearest Neighbor(k-NN), Support Vector Machine(SVM), Random Forest을 사용하여 이상 및 고장 진단을 수행하였다. 또한 진단 정확성을 비교할 목적으로 이상 감지에 오토인코더, 고장진단에는 합성곱 기반의 Conv1D도 추가로 이용하였다. 비정상적 시계열로부터 통계 및 주파수 속성으로 구성된 시계열 특징 벡터를 추출하고, 추출된 특징 벡터에 정규화 및 차원 축소 기법을 적용하였다. 특징 벡터의 선택과 정규화, 차원 축소 여부에 따라 달라지는 기계학습의 진단 정확도를 비교하였다. 또한, 적용된 학습 알고리즘 별로 초매개변수 최적화 과정과 적층 구조를 설명하였다. 최종적으로 기존의 심층학습과 비교하여, 기계학습도 가변 회전기기의 고장을 정확하게 진단할 수 있는 절차를 제시하였다.
Trans Abstract
This study examined the diagnostics of abnormalities and faults of equipment, whose rotational speed changes even during regular operation. The purpose of this study was to suggest a procedure that can properly apply machine learning to the time series data, comprising non-stationary characteristics as the rotational speed changes. Anomaly and fault diagnosis was performed using machine learning: k-Nearest Neighbor (k-NN), Support Vector Machine (SVM), and Random Forest. To compare the diagnostic accuracy, an autoencoder was used for anomaly detection and a convolution based Conv1D was additionally used for fault diagnosis. Feature vectors comprising statistical and frequency attributes were extracted, and normalization & dimensional reduction were applied to the extracted feature vectors. Changes in the diagnostic accuracy of machine learning according to feature selection, normalization, and dimensional reduction are explained. The hyperparameter optimization process and the layered structure are also described for each algorithm. Finally, results show that machine learning can accurately diagnose the failure of a variable-rotation machine under the appropriate feature treatment, although the convolution algorithms have been widely applied to the considered problem.
1. 서 론
본 연구는 운전 조건에 따라 회전 속도가 변하는 가변 회전기기의 이상감지 및 고장진단을 위한 효과적인 알고리즘 선택에 관심을 두고 있다. 터빈, 펌프, 압축기, 기어장치 등의 회전기기는 질량 불균형, 축 정렬 불량, 베어링 결함, 기계적 느슨함 등과 같은 고장의 가능성을 가지고 있으며 최근 회전기기의 고속화, 복잡화, 정밀화 경향으로 인해 고장진단과 예방은 여전히 중요한 문제이다. 회전 기기의 진동신호가 정상적(Stationary)일 경우, 시계열 특징(Feature)을 기계학습 분류 및 예측 알고리즘의 학습에 사용함으로써 효율적으로 고장을 분류할 수 있다. 즉, 시계열의 통계적 속성인 RMS(Root mean square), Peak-peak, Skewness, Crest factor, Kurtosis 등의 값을 특징 벡터로 적용할 수 있다(Riaz et al., 2017). 신호의 RMS, Kurtosis, Crest Factor 등 통계적 특징을 기계학습에 사용하여 고장을 분류한 사례는 다수 찾을 수 있다(Sreejith et al., 2008; Li et al., 2015). 위와 같이 특징 벡터를 이용한 알고리즘은 일정한 회전 조건의 시스템에서 발생하는 고장 신호를 감지하는 데 적합하다. 이에 반하여, 풍력 터빈의 유성 기어박스 같이 가변 회전 기기의 상태 신호는 비정상(Non-stationary) 특징을 보이기 때문에 통계 또는 주파수 특성 만으로는 정확한 고장진단이 어렵다고 알려져 있다(Bartelmus et al., 2010; Feng and Liang, 2014; Kan et al., 2015). 그러나, Pestana-Viana et al. (2016) 은 변속 조건을 가진 진동 신호로부터 엔트로피(Entropy), 그리고 첨도(Kurtosis) 등으로 특징 벡터를 구성하고, ANN을 이용하여 질량 불균형과 축 정렬 불량의 고장을 분류하였으나, 정확도가 높지 않은 단점을 가지고 있다. 한편, 심층학습을 활용한 고장진단 방법은 합성곱으로 신호의 고유한 특성을 연산하기 때문에 특징 선택의 의존도가 없는 장점이 있다(Liao et al., 2020). 특히, 시간-주파수 변환(예: Wavelet 변환, Hilbert huang 변환, Short time fourier 변환)으로 얻은 주파수 이미지에 심층학습을 적용하여 고장을 판별하면 높은 진단 정확도를 얻는 다는 것이 널리 알려져 있다(Verstraete et al., 2017; Yuan et al., 2018; Tao et al., 2020). 따라서 속도 변동이 있는 시계열에 합성곱을 직접 적용하는 CNN (Convolutional neural network) 계열의 심층학습이 효율적인 것으로 알려져 있다(Qiao et al., 2020). 그러나, CNN은 풀링(Pooling) 과정에서 정보가 손실되거나, 합성곱 계산에 많은 연산 시간이 필요하다는 점 때문에 실시간 진단 측면에서는 단점을 가지고 있다.
위와 같은 배경에서 본 연구는 변동 속도를 가진 회전기기의 고장진단에서 심층학습 수준의 정확성을 가진 기계학습의 적용 절차를 제시하고자 한다. 특히, 기계학습 적용 과정에서 장비의 비정상성을 반영할 수 있는 방안을 제안하고 심층학습의 정확성과 비교하고자 한다. 이를 통하여 변속조건의 고장 진단에 있어서 기계학습의 적용 가능성을 확인하고자 한다.
2. 진단 알고리즘의 개요
2.1 진단 절차 별 알고리즘
본 장에서는 진단에 적용한 알고리즘을 설명하였다. Table 1 에 절차 별로 알고리즘을 정리하였다. 이상감지는 장비의 정상 가동 유무를 구별하는 절차를 의미하며, 기계학습 분류 기법인 k-NN 과 SVM, 그리고 Random forest 를 적용하였다. 또한 고장 신호가 없는 경우에도 이상 감지가 가능하도록 오토인코더도 적용하였다. 한편, 고장진단에는 기계학습과 심층학습을 적용하였다. 또한, 고장 진단의 정확도를 비교할 목적으로 CNN 모델인 Conv1D 도 적용하여 고장을 분류하였다.
Algorithms tried to anomaly detection and fault diagnosis
k-NN 은 데이터 집합 내에 유사한 속성을 가진 인스턴스 모임이 근접하여 존재한다는 가정에 기반한 알고리즘이다(Cover and Hart, 1967). SVM 은 특징 벡터의 공간에서 데이터 간의 경계를 설정하는 알고리즘이며, 경계를 대표하는 커널 함수를 결정해야한다 (Xing et al., 2017; Wang et el., 2021). Random forest 는 의사 결정 방법으로 회귀 분석 및 분류를 수행하는 방법이다(Breiman, 2001). 오토인코더는 정상 데이터를 축소된 차원으로 압축 후에 다시 복원하고, 복원된 데이터와 원본의 차이로부터 이상 유무를 판단하는 방법이다. 이는 고장 레이블(Label)이 존재하지 않는 정상 신호만으로 비정상을 판별하는 기법이다(Lee, 2021). 한편, Conv1D 는 1 차원 커널 필터가 입력 값을 이동하며 합성곱 연산을 수행하여 변환된 배열을 계산한다. 인접한 배열 층의 커널 크기에 해당하는 노드와 선형 결합을 통해 이들 사이에 패턴을 인식하는 방법이다(Wang, 2019; Faust et al., 2018). 모든 알고리즘은 파이썬 기반으로 구현하고, 기계학습에는 Scikit-learn, 오토인코더와 Conv1D 는 Keras 모듈을 각각 사용하였다. 데이터 전처리 과정에는 Numpy 및 Matplotlib 모듈을 사용하였다.
2.2 진단 알고리즘 적용 절차
기계학습은 데이터 전처리, 특징 추출, 학습 및 최적화 과정을 거쳤다. 각 기계학습 알고리즘의 초매개변수 최적화 과정은 4 장에 상세하게 기술하였다. 오토인코더 기반의 이상감지 모델도 Fig. 1 과 같이 데이터 전처리, 특징 추출, 학습 절차로 적용하였다. 인코더 층과 디코더층을 2 개씩 쌓은 적층을 구성하고, 기계학습에서 사용하였던 특징 벡터를 오토인코더의 학습 과정에도 사용하여 연산 시간을 단축시켰다. 그 후에 정상 샘플에서 추출한 특징 벡터로써 오토인코더를 학습시킨 후에, 입력된 신호의 복원 오류를 정상 샘플의 값과 비교하여 비정상 여부를 판단하였다. 이때 MAE(Mean absolute error)를 복원오류 및 정상 판단의 기준으로 선택하였다.
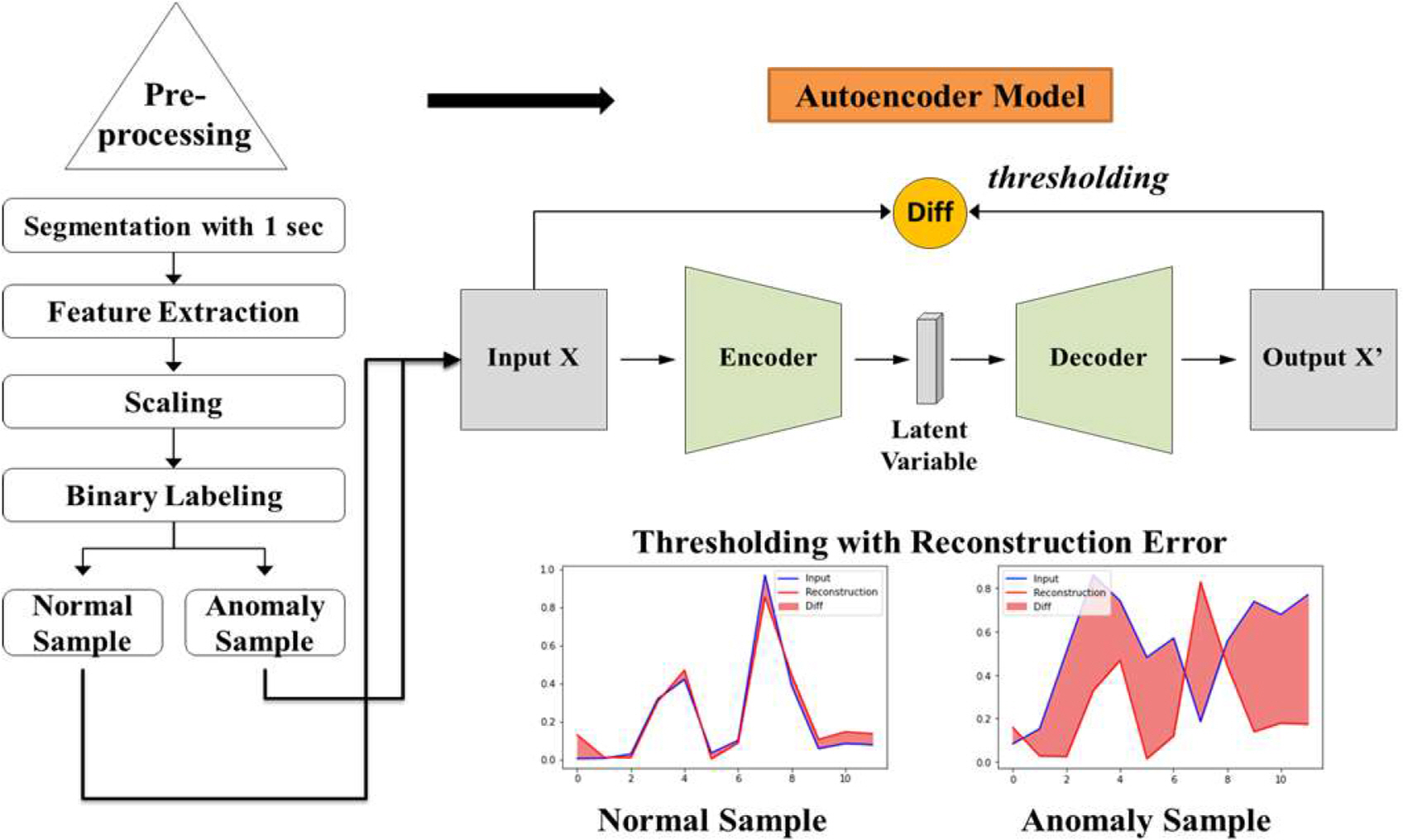
Overall procedure of autoencoder
고장 진단에 적용한 Conv1D 의 적층 구조는 Fig. 2 에 요약하였다. 두 개의 합성 층(Convolutional layer)과 풀링층(Pooling layer)으로 신경망을 구성하였다. 학습에 사용할 원래 진동 신호는 다운 샘플링하여 계산시간을 단축하였다. 또한 저역 통과 필터를 추가로 적용하여 신호의 왜곡 현상인 에일리어싱(Aliasing)을 방지하였다. 다음으로 합성층이 전처리를 거친 진동신호를 연산하여 특징을 추출하도록 하고, 풀링 층은 합성층이 연산한 특징 벡터를 압축하여 계산 시간이 단축되도록 하였다. 마지막으로 추출한 특징을 완전 연결층과 연결함으로써 고장 모드로 분류하는 출력 층을 지정하였다.
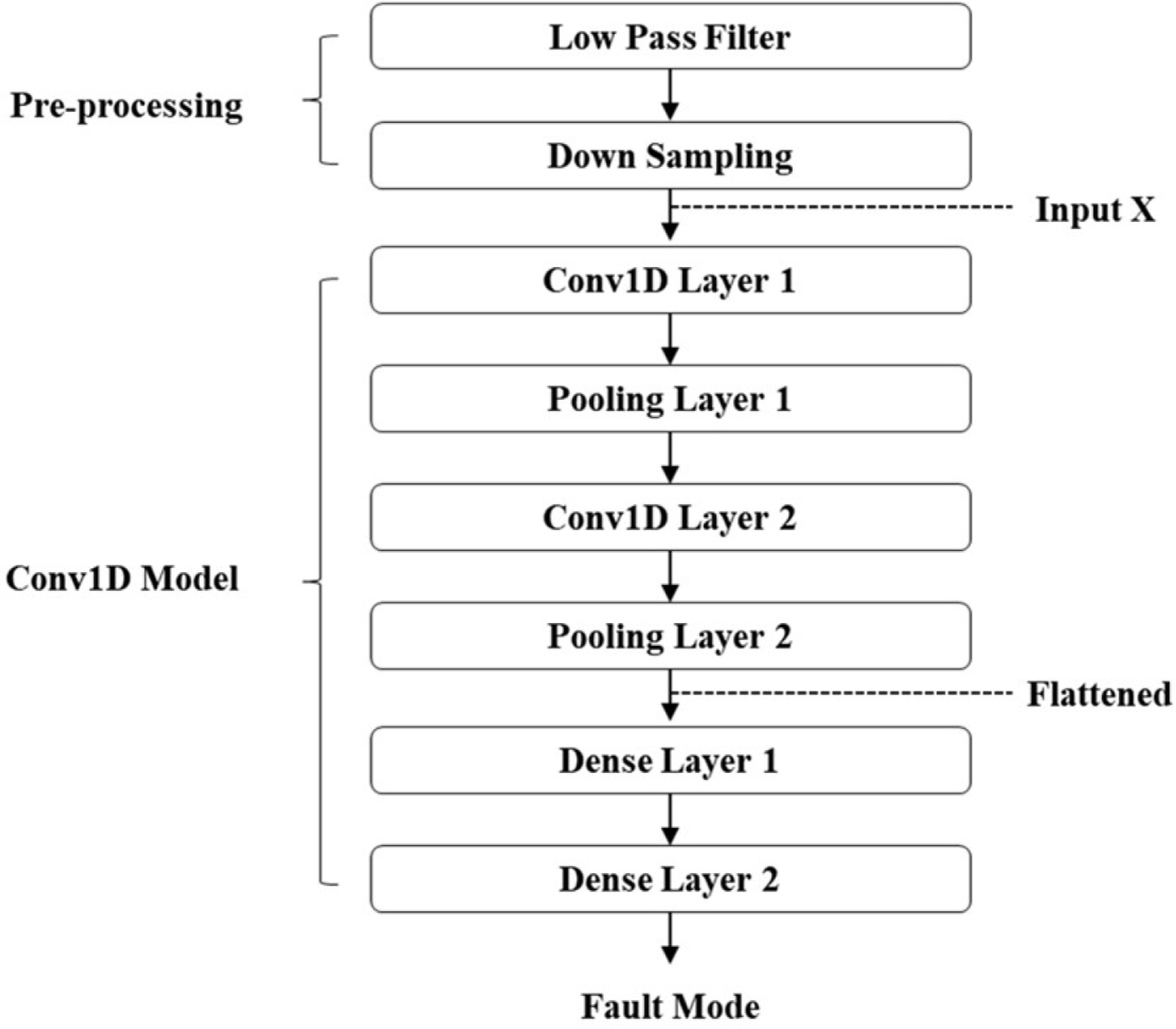
Overall procedure of Conv1D
3. 대상 장비 및 학습 데이터
3.1 가변 회전 장비의 센서 데이터
고장 학습에는 Fig. 3 에 보인 결함 모의실험장비에서 계측한 MAFAULDA (Machinery fault database) 데이터를 사용하였다(de Lima et al., 2013). MAFAULDA 는 가변 회전기기의 고장 진단에서 알고리즘 비교 검증 및 정확성 벤치마크에 널리 사용되고 있다 (Ali et al., 2019). 모의실험장비는 모터, 축, 베어링 등으로 구성되어 있으며, 2 개의 베어링에 가속도 센서를 각각 부착하여 3 방향의 가속도를 계측하였다. 축 정렬 불량, 질량 불균형 및 베어링 결함을 인위적으로 발생시키고, 변속조건에서 신호가 계측되었다. 총 8 개의 신호로 구성되어 있으며, 회전 속도계, 6 개의 가속도계, 음향 센서로부터 초당 50kHz 로 신호가 기록되었다. 학습에 사용한 신호는 880 개의 파일로 구성되어 있으며, 각 파일은 5 초씩 기록되었다. 학습 데이터는 다음과 같이 구성되어 있다.

Schematic drawing of machinery fault simulator
• 정상: 49 개 데이터로 구성됨 (행렬= 12,250,000×8)
• 질량 불균형: 불균형 질량(6~35 g) 축에 부가된 333 개 데이터 (행렬= 83,250,000×8)
• 수평축 정렬 불량: 0.5~2.0mm 의 수평 축 편심이 부가된 197 개의 샘플(행렬= 49,250,000×8)
• 수직축 정렬 불량: 수직 축 편심 (0.51~1.90mm)이 만들어진, 301 개의 샘플(행렬=75,250,000×8)
3.2 계측 신호의 선행 분석
정상 상태와 축 정렬불량 상태의 일부를 Fig. 4 에 보였다. 고장 종류에 따라 진폭 차이가 존재했으나 육안으로 고장을 식별하기는 어려웠다. 회전수 변화를 파악하기 위하여 가속도 신호를 STFT 로 분석하였으며, Fig. 5 에 결과를 제시하였다. 회전 주파수는 약 12 Hz 에서 60Hz 까지 선형적으로 증가하였으며, 회전속도 변화는 12 RPM/s 로 계산되었다.
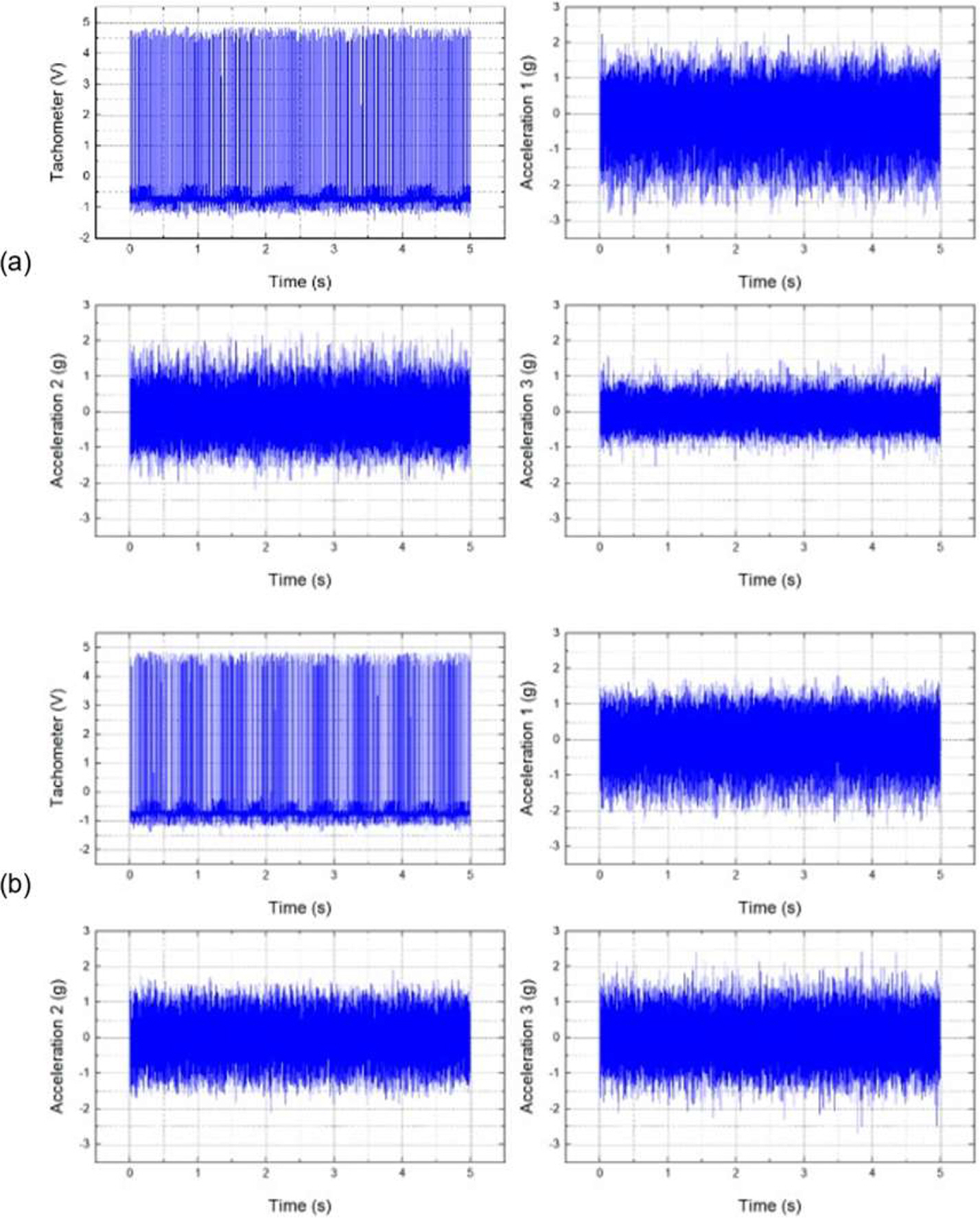
Raw data of measured signal in (a) normal state and (b) horizontal misalignment state
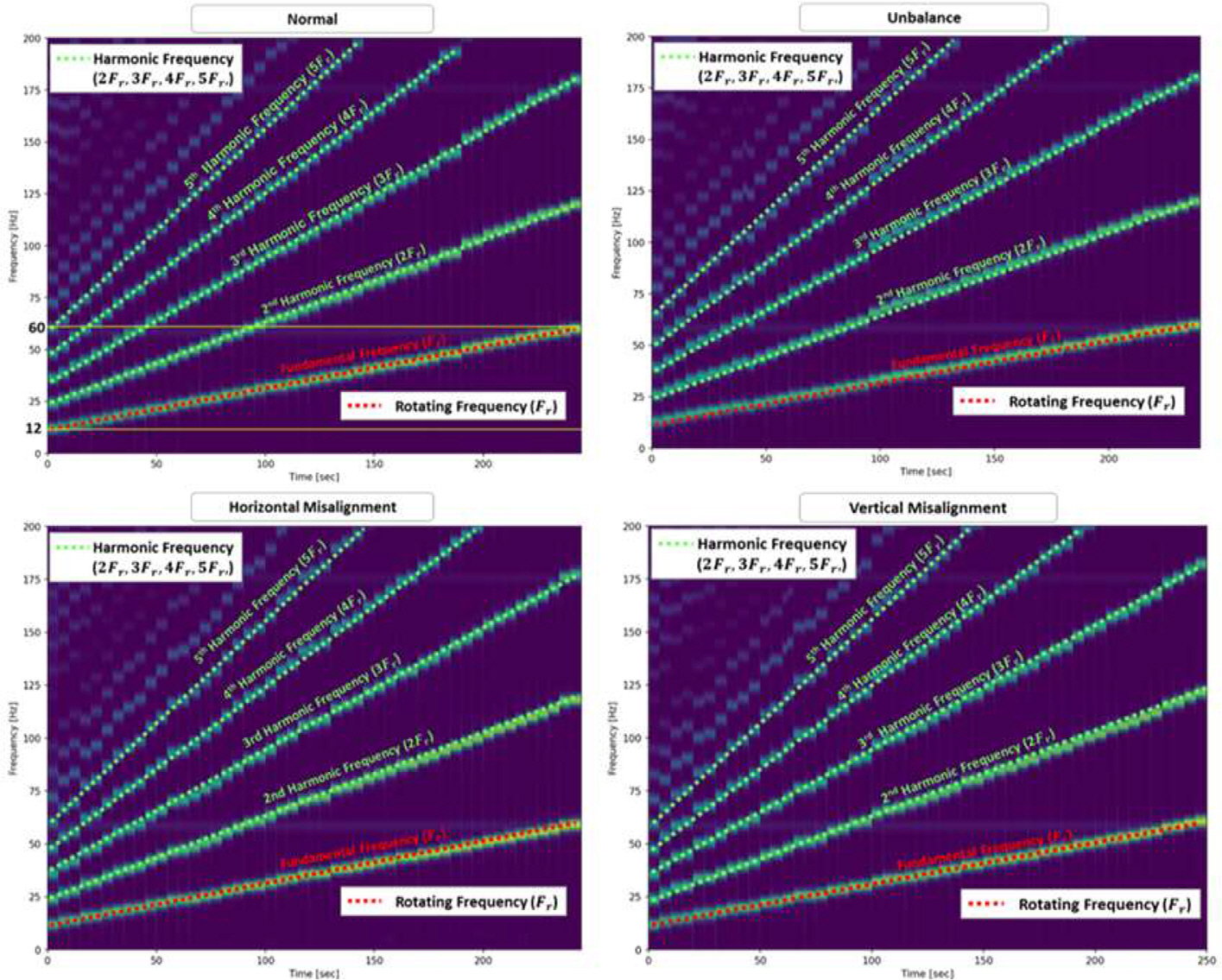
STFT of measured data in each operating condition
3.3 데이터 전처리 및 특징 추출
먼저, 학습 데이터 중 정상 샘플과 고장 샘플을 각각 ‘Normal’, ‘Anomaly’ 레이블을 부여하였으며, 고장 유형 별로 레이블을 추가로 부여하였다. 원 신호는 1초로 분할하고, 각 시분할 간격에서 계산한 통계 값을 시계열 벡터로 구성하였다. 통계 값으로는 절댓값 평균(xabs), 실효치(xrms), 왜도(xskew), 첨도(xkurt)를 선택하여 특징 벡터를 구성하였다. Pestana-Viana et al.(2016)는 MAFULDA 데이터로부터 통계적 속성 만을 특징 벡터로 선택하여 신경망 알고리즘에 적용하여 고장을 진단하면 약 81.2%의 정확도를 보임을 제시하였다. 이는 회전수(주파수) 변화의 속성이 포함되지 않은 것으로 판단된다. 따라서 본 연구에서는 고장 유형에 따라 주파수 간의 상대적인 진폭차이가 있는 것을 고려하여, 고유 주파수(Fr)와 조화 주파수(2Fr,3Fr)의 진폭을 주파수 특성 값으로 추가로 적용하였다. Fig. 6은 조화 주파수 별로 진폭을 보인 것이다. 따라서, Table 2에 보인 것과 같이 각 진동 신호 별로 7개의 통계 속성과 조화 주파수 속성 값으로 특징 벡터를 구성하였고, 6개의 진동 데이터를 반영하여 모두 42개의 특징 벡터(fraw)을 추출하였다.
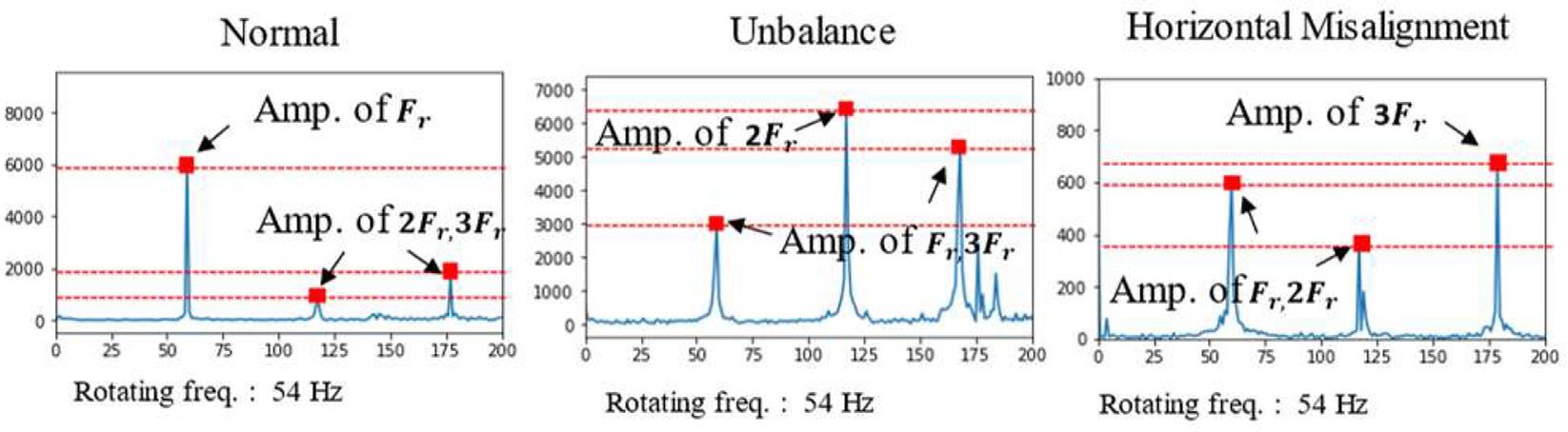
Relative difference of Amplitude by fault mode
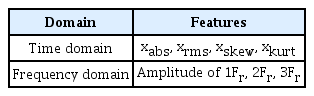
Features extracted from MAFAULDA
3.4 특징 벡터의 정규화
앞절에서 구한 특징 벡터(fraw)는 과적합을 일으킬 수 있으므로, 카이 제곱(Chi-square, χ2) 특징선택 및 주성분 분석을 적용하여 각각 상위 상관도를 가진 10개의 카이 제곱 기반 특징 벡터(fChi)와 차원 축소된 특징 벡터(fPCA)를 학습 데이터로 이용하였다. 각 특징벡터에 Robust 및 Minmax스케일링을 적용하였으며, Fig. 7에 그 결과를 제시하였다.
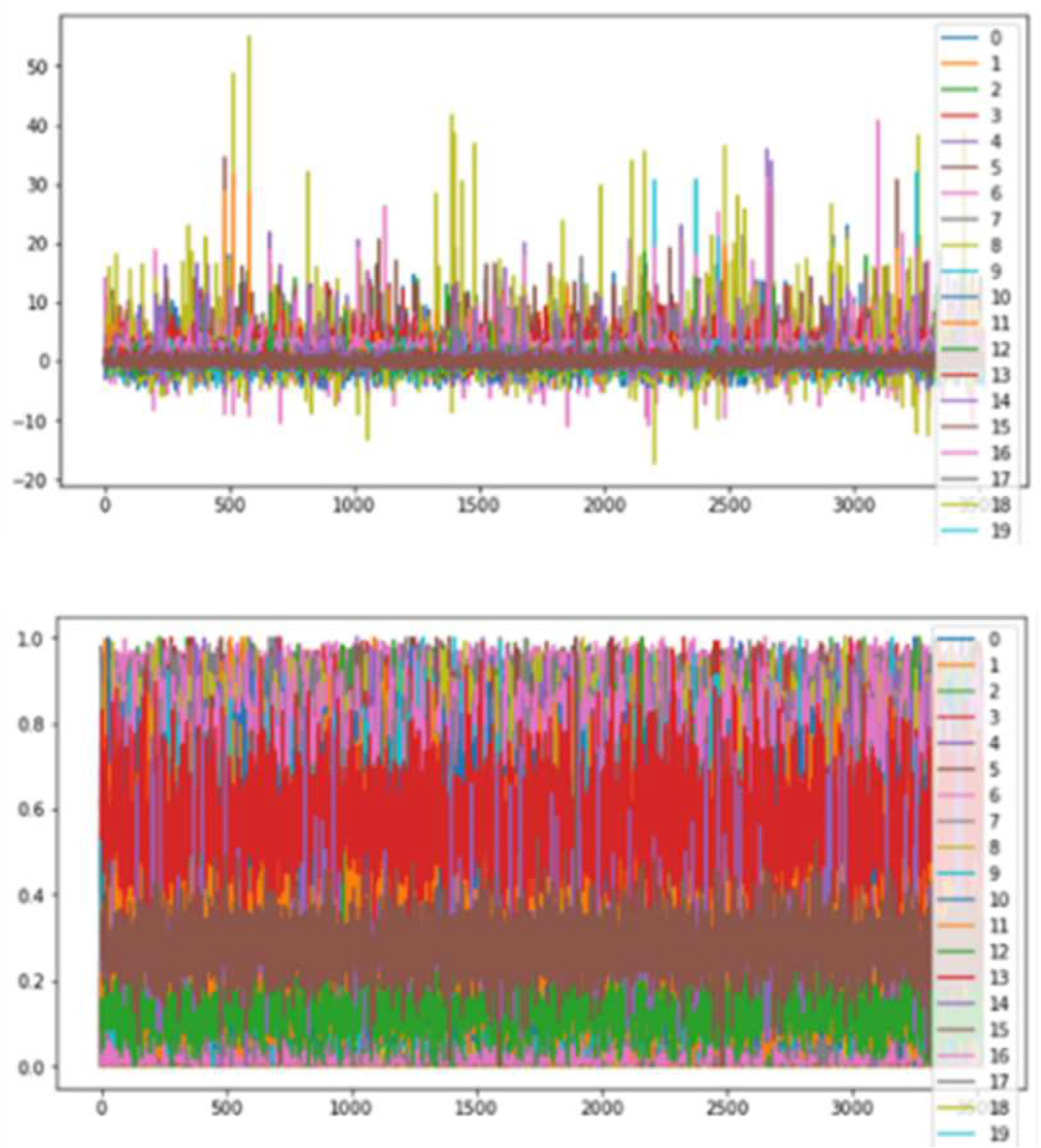
Features processed by Robust scaling (Upper) and Minmax scaling (Lower)
4. 고장 진단 과정 및 결과
4.1 초매개변수 최적화
k-분할 교차 검증(k-Fold cross validation)과 격자 탐색(Grid search)을 사용하여 초매개변수를 최적화하였다 (Bui et al., 2012; Refaeilzadeh et al., 2009). 이 과정에서 k-NN의 매개 변수로 n_neighbors는 [1~9], weights는 [uniform, distance]를 사용하고, 가중치 결정 알고리즘은 ball_tree와 kd_tree 및 brute를 사용하였다. GridSearch의 cv = 3, refit = True, return_train_score = True 로 설정하였다. 즉, 3-분할 교차 검증을 적용하였으며, 모든 하위 집합을 훈련 집합으로 만들 때까지 반복하여 각 시행마다 모델의 성능을 계산하였다. k-NN, SVM, Random forest의 각 초매개변수와 최적화 결과를 Table 3,4,5에 정리하였다. 여기서, SVM의 C와 Gamma는 각각 오류 허용 변수 및 결정 경계의 복잡도와 관련된 변수이다. Random forest의 n_estimators, max_depth는 각각 결정 트리 개수 및 최대 깊이를 의미한다.
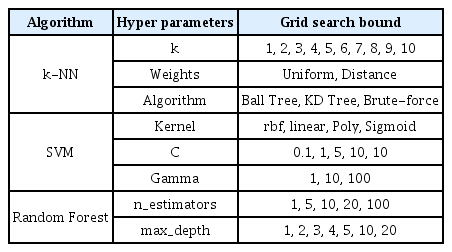
Grid search bound of each algorithm and feature vector

Optimization result of hyper-parameter for each anomaly detection algorithm and feature vector

Optimization result of hyper-parameter for each fault detection algorithm and feature vector
4.2 이상감지 적용 결과
이상감지에는 먼저 기계학습 모델을 적용하였다. fraw, fChi, fPCA 의 특징 벡터를 학습에 사용하였으며, 세가지 종류의 고장 신호에 이상 레이블을 지정하였다. Table 6에 각 알고리즘과 학습 벡터 별로 예측 성능을 정리하였다. fraw로 학습하였을 때 분류 알고리즘의 이상 감지 성능이 가장 높고 fPCA는 약간 낮은 성능을 보였으나, 정확성 차이는 크지 않음을 확인하였다.
Performance of machine learning in anomaly detection
다음으로 오토인코더를 적용하여 이상 감지를 수행하였으며, 학습의 입력 층으로 fraw를 사용하였다. 단, 정상 샘플과 비정상 샘플의 비율이 245:4,155으로 불균형이 심하였으므로 SMOTE 기법(Chawla et al., 2002)을 사용하여 과선택 (Over sampling)을 실시하였다. 매개 변수는 sampling strategy=auto, k_neighbors=5, random state를 선택하고, Sampling_strategy=not majority로써 다수클래스에 맞춰 하위 클래스를 과선택 하였다. SMOTE을 적용한 결과 정상과 비정상 샘플의 비율을 4,155:4,155로 구성되었다. 재생성 오차 값은 MAE를 사용했으며, Fig. 8은 각각 정상 샘플과 이상 샘플을 학습시켰을 때 계산된 재생성 오차의 히스토그램이다. 정상 샘플과 이상 샘플의 MAE값은 각각 0.014~0.023과 0.03~0.155의 분포를 보였다. 임계점은 정상 샘플의 MAE 평균값에 2배의 표준편차를 더해 0.03로 설정했으며, 임계점을 초과하는 MAE를 생성하는 샘플을 비정상 상태로 분류했다. 오토인코더 기반 이상감지 모델의 이상감지 성능은 Table 7와 같이 계산되었다.
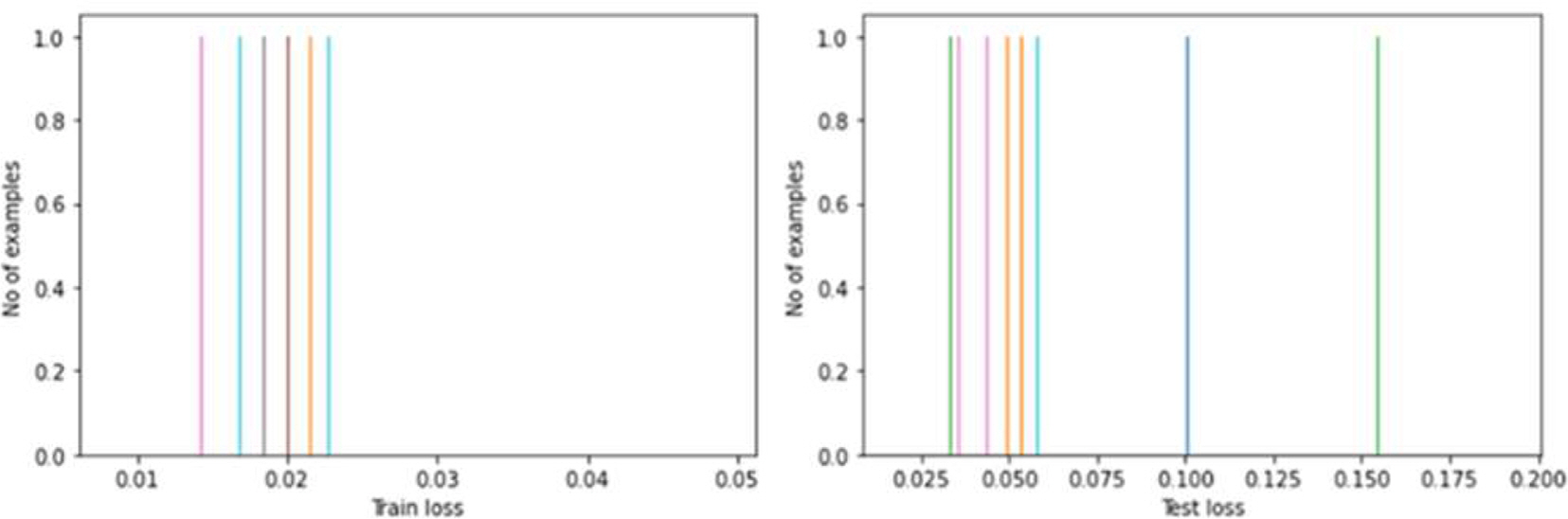
Histogram of reconstruction error of normal and anomaly samples
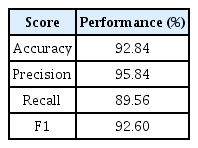
Performance of autoencoder-based anomaly detection model
4.4 고장진단 모델과 학습 결과
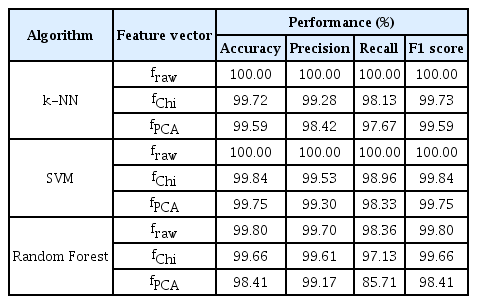
본 절은 기계학습과 합성곱 알고리즘을 적용한 고장 예측 결과를 정리하였다. Table 8에 알고리즘 별 고장진단 정확도를 정리하였으며, 특징 벡터 fraw가 모든 알고리즘 내에서 가장 우수한 예측 성능을 보여주었다. 성능 평균은 Random forest(99.79%), SVM(99.78%), k-NN(99.42%) 순으로 계산되었다.

Performance of machine learning-based fault detection
다음으로, Conv1D로 고장진단 모델을 구성하였으며, 각 적층 구조를 Table 9에 정리하였다. 진동 신호에 저주파 통과 필터를 사용하고, 1.0 kHz로 다운 샘플링하여 입력 층으로 사용하였다. Conv1D는 99.55%의 평균 성능으로 고장을 감지하였다. Random Forest와 SVM 모델의 분류 성능이 Conv1D 모델보다 우수하였으나, 값의 차이는 크지 않음을 알 수 있다. 따라서 변동 속도를 가진 회전기기의 고장진단에서 주파수 속성을 특징에 포함한다면, 기계학습도 합성곱 알고리즘과 동등한 수준의 정확도로 진단할 수 있음을 확인할 수 있었다. Conv1D 방법은 누적된 계측 신호를 학습하는 과정에 많은 연산 시간이 필요한 반면에 기계학습은 준비된 학습자가 실시간에 가깝게 진단을 수행할 수 있는 장점이 있다는 점을 감안하면, 적절한 특징 벡터를 반영한 기계학습이 변속조건의 고장진단에 적용될 수 있음을 알 수 있다.

Layers of Conv1D applied to fault detection
5. 결론
본 논문에서는 변동 속도를 가진 회전기기의 이상 진단 및 고장진단 예를 제시하였다. 변동 속도 조건하에 실험된 고장 시뮬레이터의 데이터를 학습 대상으로 사용하였다. 이상감지에서는 오토인코더가 기계학습보다 정확도가 떨어졌으나, 비정상 데이터가 없는 경우에는 활용할 수 있는 정확성을 보인 것으로 판단된다. 고장 진단에는 기계학습과 Conv1D를 적용하여 각각의 정확성을 비교하였다. 이 과정에서 특징 선택에서 주파수 속성을 추가함으로써 기계학습의 진단 정확도가 Conv1D의 성능과 유사하거나 더 우수할 수 있음을 제시하였다. 특히, 조화주파수 별로 상대적 진폭 변화를 특징 벡터에 반영하여 비정상성이 고려될 수 있음을 보였다. 다만, 실제 장비는 복잡한 조립 구조를 가짐에 따라 신호에 잡음이 많으며, 회전속도와 하중의 변동으로 인해 비정상성이 훨씬 높은 신호가 계측될 것으로 예상된다. 따라서 제안된 알고리즘을 실제 운영 장비에 적용하기 위해서는 잡음 제거 방안, 높은 비정상성을 고려한 전처리 및 적절한 특징 추출이 추가로 필요할 것으로 판단된다.
Acknowledgements
본 연구는 2022년도 산업통산자원부(해양수산부) 및 산업기술평가관리원(해양수산과학기술진흥원) 연구비 지원으로 수행된 ‘자율운항선박 기술개발사업 (20011164, 자율운항선박 핵심 기관시스템 성능 모니터링 및 고장예측/진단 시스템 기술 개발연구)’의 연구결과입니다.