


1. м„ң лЎ
ліё м—°кө¬лҠ” мҡҙм „ мЎ°кұҙм—җ л”°лқј нҡҢм „ мҶҚлҸ„к°Җ ліҖн•ҳлҠ” к°ҖліҖ нҡҢм „кё°кё°мқҳ мқҙмғҒк°җм§Җ л°Ҹ кі мһҘ진лӢЁмқ„ мң„н•ң нҡЁкіјм Ғмқё м•Ңкі лҰ¬мҰҳ м„ нғқм—җ кҙҖмӢ¬мқ„ л‘җкі мһҲлӢӨ. н„°л№Ҳ, нҺҢн”„, 압축기, кё°м–ҙмһҘм№ҳ л“ұмқҳ нҡҢм „кё°кё°лҠ” м§Ҳлҹү л¶Ҳк· нҳ•, 축 м •л ¬ л¶Ҳлҹү, лІ м–ҙл§Ғ кІ°н•Ё, кё°кі„м Ғ лҠҗмҠЁн•Ё л“ұкіј к°ҷмқҖ кі мһҘмқҳ к°ҖлҠҘм„ұмқ„ к°Җм§Җкі мһҲмңјл©° мөңк·ј нҡҢм „кё°кё°мқҳ кі мҶҚнҷ”, ліөмһЎнҷ”, м •л°Җнҷ” кІҪн–ҘмңјлЎң мқён•ҙ кі мһҘ진лӢЁкіј мҳҲл°©мқҖ м—¬м „нһҲ мӨ‘мҡ”н•ң л¬ём ңмқҙлӢӨ. нҡҢм „ кё°кё°мқҳ 진лҸҷмӢ нҳёк°Җ м •мғҒм Ғ(Stationary)мқј кІҪмҡ°, мӢңкі„м—ҙ нҠ№м§•(Feature)мқ„ кё°кі„н•ҷмҠө 분лҘҳ л°Ҹ мҳҲмёЎ м•Ңкі лҰ¬мҰҳмқҳ н•ҷмҠөм—җ мӮ¬мҡ©н•ЁмңјлЎңмҚЁ нҡЁмңЁм ҒмңјлЎң кі мһҘмқ„ 분лҘҳн• мҲҳ мһҲлӢӨ. мҰү, мӢңкі„м—ҙмқҳ нҶөкі„м Ғ мҶҚм„ұмқё RMS(Root mean square), Peak-peak, Skewness, Crest factor, Kurtosis л“ұмқҳ к°’мқ„ нҠ№м§• лІЎн„°лЎң м Ғмҡ©н• мҲҳ мһҲлӢӨ(Riaz et al., 2017). мӢ нҳёмқҳ RMS, Kurtosis, Crest Factor л“ұ нҶөкі„м Ғ нҠ№м§•мқ„ кё°кі„н•ҷмҠөм—җ мӮ¬мҡ©н•ҳм—¬ кі мһҘмқ„ 분лҘҳн•ң мӮ¬лЎҖлҠ” лӢӨмҲҳ м°ҫмқ„ мҲҳ мһҲлӢӨ(Sreejith et al., 2008; Li et al., 2015). мң„мҷҖ к°ҷмқҙ нҠ№м§• лІЎн„°лҘј мқҙмҡ©н•ң м•Ңкі лҰ¬мҰҳмқҖ мқјм •н•ң нҡҢм „ мЎ°кұҙмқҳ мӢңмҠӨн…ңм—җм„ң л°ңмғқн•ҳлҠ” кі мһҘ мӢ нҳёлҘј к°җм§Җн•ҳлҠ” лҚ° м Ғн•©н•ҳлӢӨ. мқҙм—җ л°ҳн•ҳм—¬, н’Қл Ҙ н„°л№Ҳмқҳ мң м„ұ кё°м–ҙл°•мҠӨ к°ҷмқҙ к°ҖліҖ нҡҢм „ кё°кё°мқҳ мғҒнғң мӢ нҳёлҠ” л№„м •мғҒ(Non-stationary) нҠ№м§•мқ„ ліҙмқҙкё° л•Ңл¬ём—җ нҶөкі„ лҳҗлҠ” мЈјнҢҢмҲҳ нҠ№м„ұ л§ҢмңјлЎңлҠ” м •нҷ•н•ң кі мһҘ진лӢЁмқҙ м–ҙл өлӢӨкі м•Ңл Өм ё мһҲлӢӨ(Bartelmus et al., 2010; Feng and Liang, 2014; Kan et al., 2015). к·ёлҹ¬лӮҳ, Pestana-Viana et al. (2016) мқҖ ліҖмҶҚ мЎ°кұҙмқ„ к°Җ진 진лҸҷ мӢ нҳёлЎңл¶Җн„° м—”нҠёлЎңн”ј(Entropy), к·ёлҰ¬кі мІЁлҸ„(Kurtosis) л“ұмңјлЎң нҠ№м§• лІЎн„°лҘј кө¬м„ұн•ҳкі , ANNмқ„ мқҙмҡ©н•ҳм—¬ м§Ҳлҹү л¶Ҳк· нҳ•кіј 축 м •л ¬ л¶Ҳлҹүмқҳ кі мһҘмқ„ 분лҘҳн•ҳмҳҖмңјлӮҳ, м •нҷ•лҸ„к°Җ лҶ’м§Җ м•ҠмқҖ лӢЁм җмқ„ к°Җм§Җкі мһҲлӢӨ. н•ңнҺё, мӢ¬мёөн•ҷмҠөмқ„ нҷңмҡ©н•ң кі мһҘ진лӢЁ л°©лІ•мқҖ н•©м„ұкіұмңјлЎң мӢ нҳёмқҳ кі мң н•ң нҠ№м„ұмқ„ м—°мӮ°н•ҳкё° л•Ңл¬ём—җ нҠ№м§• м„ нғқмқҳ мқҳмЎҙлҸ„к°Җ м—ҶлҠ” мһҘм җмқҙ мһҲлӢӨ(Liao et al., 2020). нҠ№нһҲ, мӢңк°„-мЈјнҢҢмҲҳ ліҖнҷҳ(мҳҲ: Wavelet ліҖнҷҳ, Hilbert huang ліҖнҷҳ, Short time fourier ліҖнҷҳ)мңјлЎң м–»мқҖ мЈјнҢҢмҲҳ мқҙлҜём§Җм—җ мӢ¬мёөн•ҷмҠөмқ„ м Ғмҡ©н•ҳм—¬ кі мһҘмқ„ нҢҗлі„н•ҳл©ҙ лҶ’мқҖ 진лӢЁ м •нҷ•лҸ„лҘј м–»лҠ” лӢӨлҠ” кІғмқҙ л„җлҰ¬ м•Ңл Өм ё мһҲлӢӨ(Verstraete et al., 2017; Yuan et al., 2018; Tao et al., 2020). л”°лқјм„ң мҶҚлҸ„ ліҖлҸҷмқҙ мһҲлҠ” мӢңкі„м—ҙм—җ н•©м„ұкіұмқ„ м§Ғм ‘ м Ғмҡ©н•ҳлҠ” CNN (Convolutional neural network) кі„м—ҙмқҳ мӢ¬мёөн•ҷмҠөмқҙ нҡЁмңЁм Ғмқё кІғмңјлЎң м•Ңл Өм ё мһҲлӢӨ(Qiao et al., 2020). к·ёлҹ¬лӮҳ, CNNмқҖ н’Җл§Ғ(Pooling) кіјм •м—җм„ң м •ліҙк°Җ мҶҗмӢӨлҗҳкұ°лӮҳ, н•©м„ұкіұ кі„мӮ°м—җ л§ҺмқҖ м—°мӮ° мӢңк°„мқҙ н•„мҡ”н•ҳлӢӨлҠ” м җ л•Ңл¬ём—җ мӢӨмӢңк°„ 진лӢЁ мёЎл©ҙм—җм„ңлҠ” лӢЁм җмқ„ к°Җм§Җкі мһҲлӢӨ.
мң„мҷҖ к°ҷмқҖ л°°кІҪм—җм„ң ліё м—°кө¬лҠ” ліҖлҸҷ мҶҚлҸ„лҘј к°Җ진 нҡҢм „кё°кё°мқҳ кі мһҘ진лӢЁм—җм„ң мӢ¬мёөн•ҷмҠө мҲҳмӨҖмқҳ м •нҷ•м„ұмқ„ к°Җ진 кё°кі„н•ҷмҠөмқҳ м Ғмҡ© м Ҳм°ЁлҘј м ңмӢңн•ҳкі мһҗ н•ңлӢӨ. нҠ№нһҲ, кё°кі„н•ҷмҠө м Ғмҡ© кіјм •м—җм„ң мһҘ비мқҳ л№„м •мғҒм„ұмқ„ л°ҳмҳҒн• мҲҳ мһҲлҠ” л°©м•Ҳмқ„ м ңм•Ҳн•ҳкі мӢ¬мёөн•ҷмҠөмқҳ м •нҷ•м„ұкіј 비көҗн•ҳкі мһҗ н•ңлӢӨ. мқҙлҘј нҶөн•ҳм—¬ ліҖмҶҚмЎ°кұҙмқҳ кі мһҘ 진лӢЁм—җ мһҲм–ҙм„ң кё°кі„н•ҷмҠөмқҳ м Ғмҡ© к°ҖлҠҘм„ұмқ„ нҷ•мқён•ҳкі мһҗ н•ңлӢӨ.
2. 진лӢЁ м•Ңкі лҰ¬мҰҳмқҳ к°ңмҡ”
2.1 진лӢЁ м Ҳм°Ё лі„ м•Ңкі лҰ¬мҰҳ
ліё мһҘм—җм„ңлҠ” 진лӢЁм—җ м Ғмҡ©н•ң м•Ңкі лҰ¬мҰҳмқ„ м„ӨлӘ…н•ҳмҳҖлӢӨ. Table 1 м—җ м Ҳм°Ё лі„лЎң м•Ңкі лҰ¬мҰҳмқ„ м •лҰ¬н•ҳмҳҖлӢӨ. мқҙмғҒк°җм§ҖлҠ” мһҘ비мқҳ м •мғҒ к°ҖлҸҷ мң л¬ҙлҘј кө¬лі„н•ҳлҠ” м Ҳм°ЁлҘј мқҳлҜён•ҳл©°, кё°кі„н•ҷмҠө 분лҘҳ кё°лІ•мқё k-NN кіј SVM, к·ёлҰ¬кі Random forest лҘј м Ғмҡ©н•ҳмҳҖлӢӨ. лҳҗн•ң кі мһҘ мӢ нҳёк°Җ м—ҶлҠ” кІҪмҡ°м—җлҸ„ мқҙмғҒ к°җм§Җк°Җ к°ҖлҠҘн•ҳлҸ„лЎқ мҳӨнҶ мқёмҪ”лҚ”лҸ„ м Ғмҡ©н•ҳмҳҖлӢӨ. н•ңнҺё, кі мһҘ진лӢЁм—җлҠ” кё°кі„н•ҷмҠөкіј мӢ¬мёөн•ҷмҠөмқ„ м Ғмҡ©н•ҳмҳҖлӢӨ. лҳҗн•ң, кі мһҘ 진лӢЁмқҳ м •нҷ•лҸ„лҘј 비көҗн• лӘ©м ҒмңјлЎң CNN лӘЁлҚёмқё Conv1D лҸ„ м Ғмҡ©н•ҳм—¬ кі мһҘмқ„ 분лҘҳн•ҳмҳҖлӢӨ.
k-NN мқҖ лҚ°мқҙн„° 집합 лӮҙм—җ мң мӮ¬н•ң мҶҚм„ұмқ„ к°Җ진 мқёмҠӨн„ҙмҠӨ лӘЁмһ„мқҙ к·јм ‘н•ҳм—¬ мЎҙмһ¬н•ңлӢӨлҠ” к°Җм •м—җ кё°л°ҳн•ң м•Ңкі лҰ¬мҰҳмқҙлӢӨ(Cover and Hart, 1967). SVM мқҖ нҠ№м§• лІЎн„°мқҳ кіөк°„м—җм„ң лҚ°мқҙн„° к°„мқҳ кІҪкі„лҘј м„Өм •н•ҳлҠ” м•Ңкі лҰ¬мҰҳмқҙл©°, кІҪкі„лҘј лҢҖн‘ңн•ҳлҠ” м»Өл„җ н•ЁмҲҳлҘј кІ°м •н•ҙм•јн•ңлӢӨ (Xing et al., 2017; Wang et el., 2021). Random forest лҠ” мқҳмӮ¬ кІ°м • л°©лІ•мңјлЎң нҡҢк·Җ 분м„қ л°Ҹ 분лҘҳлҘј мҲҳн–үн•ҳлҠ” л°©лІ•мқҙлӢӨ(Breiman, 2001). мҳӨнҶ мқёмҪ”лҚ”лҠ” м •мғҒ лҚ°мқҙн„°лҘј 축мҶҢлҗң м°ЁмӣҗмңјлЎң 압축 нӣ„м—җ лӢӨмӢң ліөмӣҗн•ҳкі , ліөмӣҗлҗң лҚ°мқҙн„°мҷҖ мӣҗліёмқҳ м°ЁмқҙлЎңл¶Җн„° мқҙмғҒ мң л¬ҙлҘј нҢҗлӢЁн•ҳлҠ” л°©лІ•мқҙлӢӨ. мқҙлҠ” кі мһҘ л Ҳмқҙлё”(Label)мқҙ мЎҙмһ¬н•ҳм§Җ м•ҠлҠ” м •мғҒ мӢ нҳёл§ҢмңјлЎң л№„м •мғҒмқ„ нҢҗлі„н•ҳлҠ” кё°лІ•мқҙлӢӨ(Lee, 2021). н•ңнҺё, Conv1D лҠ” 1 м°Ёмӣҗ м»Өл„җ н•„н„°к°Җ мһ…л Ҙ к°’мқ„ мқҙлҸҷн•ҳл©° н•©м„ұкіұ м—°мӮ°мқ„ мҲҳн–үн•ҳм—¬ ліҖнҷҳлҗң л°°м—ҙмқ„ кі„мӮ°н•ңлӢӨ. мқём ‘н•ң л°°м—ҙ мёөмқҳ м»Өл„җ нҒ¬кё°м—җ н•ҙлӢ№н•ҳлҠ” л…ёл“ңмҷҖ м„ нҳ• кІ°н•©мқ„ нҶөн•ҙ мқҙл“Ө мӮ¬мқҙм—җ нҢЁн„ҙмқ„ мқёмӢқн•ҳлҠ” л°©лІ•мқҙлӢӨ(Wang, 2019; Faust et al., 2018). лӘЁл“ м•Ңкі лҰ¬мҰҳмқҖ нҢҢмқҙмҚ¬ кё°л°ҳмңјлЎң кө¬нҳ„н•ҳкі , кё°кі„н•ҷмҠөм—җлҠ” Scikit-learn, мҳӨнҶ мқёмҪ”лҚ”мҷҖ Conv1D лҠ” Keras лӘЁл“Ҳмқ„ к°Ғк°Ғ мӮ¬мҡ©н•ҳмҳҖлӢӨ. лҚ°мқҙн„° м „мІҳлҰ¬ кіјм •м—җлҠ” Numpy л°Ҹ Matplotlib лӘЁл“Ҳмқ„ мӮ¬мҡ©н•ҳмҳҖлӢӨ.
2.2 진лӢЁ м•Ңкі лҰ¬мҰҳ м Ғмҡ© м Ҳм°Ё
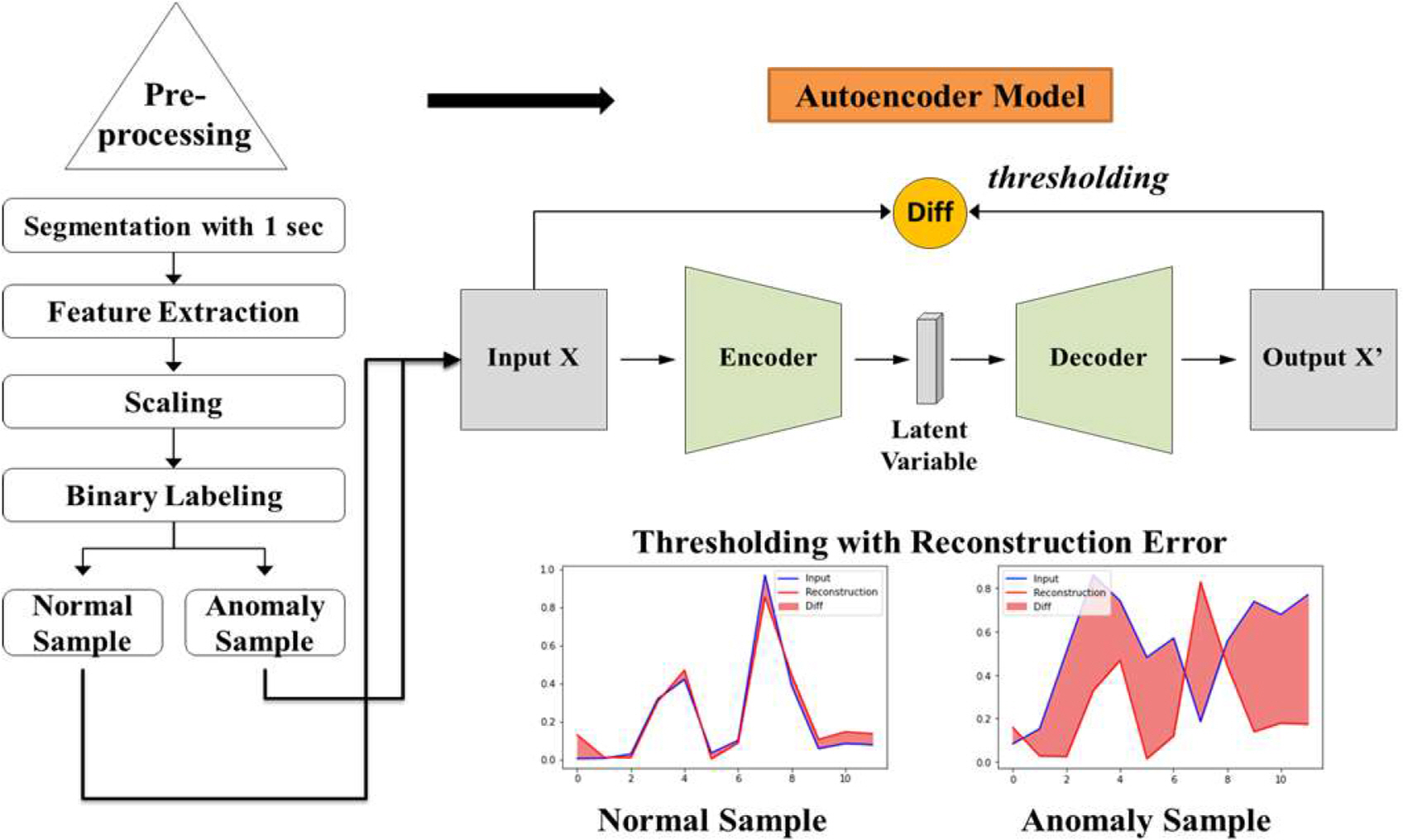
кё°кі„н•ҷмҠөмқҖ лҚ°мқҙн„° м „мІҳлҰ¬, нҠ№м§• 추м¶ң, н•ҷмҠө л°Ҹ мөңм Ғнҷ” кіјм •мқ„ кұ°міӨлӢӨ. к°Ғ кё°кі„н•ҷмҠө м•Ңкі лҰ¬мҰҳмқҳ мҙҲл§Өк°ңліҖмҲҳ мөңм Ғнҷ” кіјм •мқҖ 4 мһҘм—җ мғҒм„ён•ҳкІҢ кё°мҲ н•ҳмҳҖлӢӨ. мҳӨнҶ мқёмҪ”лҚ” кё°л°ҳмқҳ мқҙмғҒк°җм§Җ лӘЁлҚёлҸ„ Fig. 1 кіј к°ҷмқҙ лҚ°мқҙн„° м „мІҳлҰ¬, нҠ№м§• 추м¶ң, н•ҷмҠө м Ҳм°ЁлЎң м Ғмҡ©н•ҳмҳҖлӢӨ. мқёмҪ”лҚ” мёөкіј л””мҪ”лҚ”мёөмқ„ 2 к°ңм”© мҢ“мқҖ м Ғмёөмқ„ кө¬м„ұн•ҳкі , кё°кі„н•ҷмҠөм—җм„ң мӮ¬мҡ©н•ҳмҳҖлҚҳ нҠ№м§• лІЎн„°лҘј мҳӨнҶ мқёмҪ”лҚ”мқҳ н•ҷмҠө кіјм •м—җлҸ„ мӮ¬мҡ©н•ҳм—¬ м—°мӮ° мӢңк°„мқ„ лӢЁм¶•мӢңмј°лӢӨ. к·ё нӣ„м—җ м •мғҒ мғҳн”Ңм—җм„ң 추м¶ңн•ң нҠ№м§• лІЎн„°лЎңмҚЁ мҳӨнҶ мқёмҪ”лҚ”лҘј н•ҷмҠөмӢңнӮЁ нӣ„м—җ, мһ…л Ҙлҗң мӢ нҳёмқҳ ліөмӣҗ мҳӨлҘҳлҘј м •мғҒ мғҳн”Ңмқҳ к°’кіј 비көҗн•ҳм—¬ л№„м •мғҒ м—¬л¶ҖлҘј нҢҗлӢЁн•ҳмҳҖлӢӨ. мқҙл•Ң MAE(Mean absolute error)лҘј ліөмӣҗмҳӨлҘҳ л°Ҹ м •мғҒ нҢҗлӢЁмқҳ кё°мӨҖмңјлЎң м„ нғқн•ҳмҳҖлӢӨ.
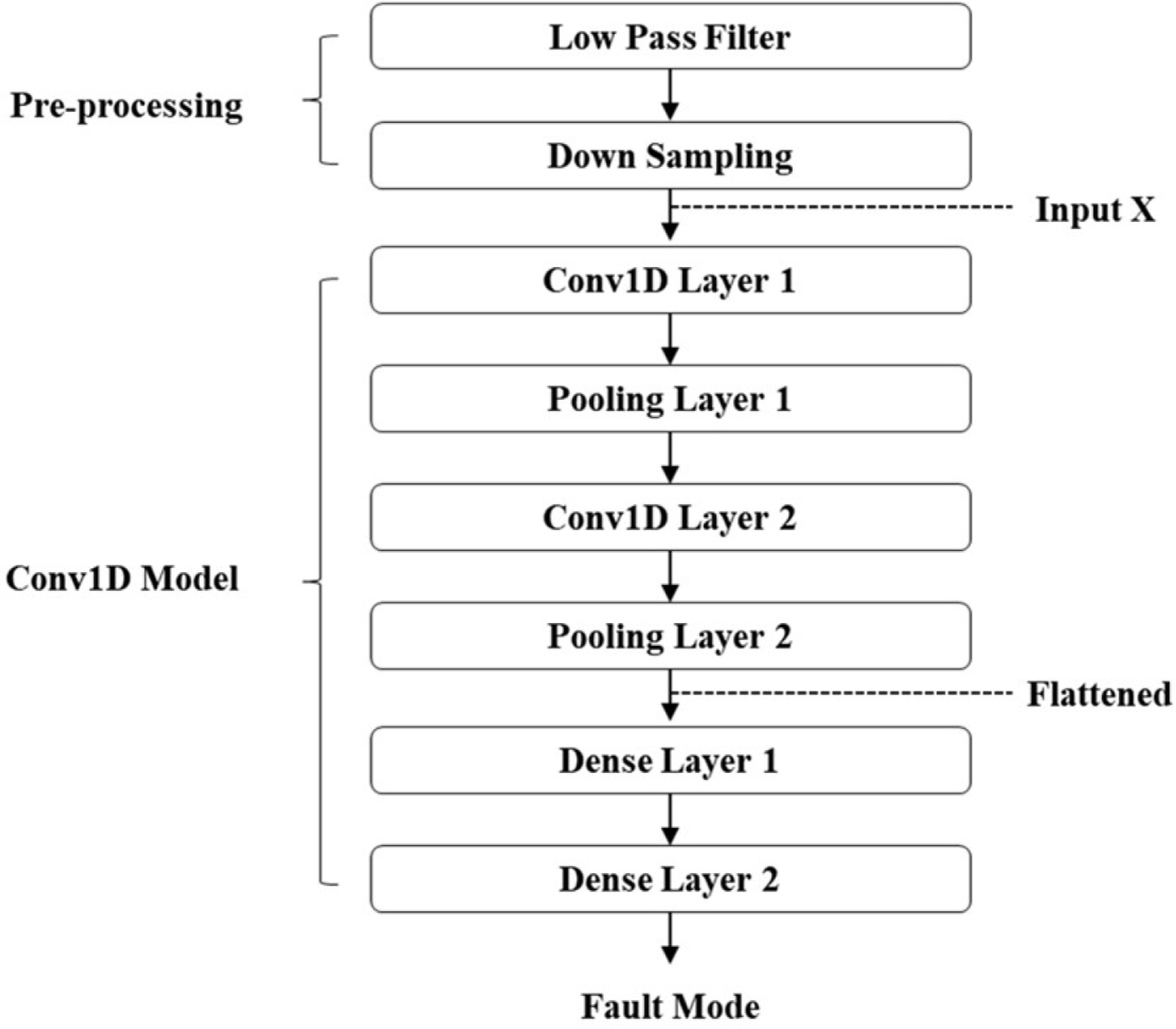
кі мһҘ 진лӢЁм—җ м Ғмҡ©н•ң Conv1D мқҳ м Ғмёө кө¬мЎ°лҠ” Fig. 2 м—җ мҡ”м•Ҫн•ҳмҳҖлӢӨ. л‘җ к°ңмқҳ н•©м„ұ мёө(Convolutional layer)кіј н’Җл§Ғмёө(Pooling layer)мңјлЎң мӢ кІҪл§қмқ„ кө¬м„ұн•ҳмҳҖлӢӨ. н•ҷмҠөм—җ мӮ¬мҡ©н• мӣҗлһҳ 진лҸҷ мӢ нҳёлҠ” лӢӨмҡҙ мғҳн”Ңл§Ғн•ҳм—¬ кі„мӮ°мӢңк°„мқ„ лӢЁм¶•н•ҳмҳҖлӢӨ. лҳҗн•ң м Җм—ӯ нҶөкіј н•„н„°лҘј 추к°ҖлЎң м Ғмҡ©н•ҳм—¬ мӢ нҳёмқҳ мҷңкіЎ нҳ„мғҒмқё м—җмқјлҰ¬м–ҙмӢұ(Aliasing)мқ„ л°©м§Җн•ҳмҳҖлӢӨ. лӢӨмқҢмңјлЎң н•©м„ұмёөмқҙ м „мІҳлҰ¬лҘј кұ°м№ң 진лҸҷмӢ нҳёлҘј м—°мӮ°н•ҳм—¬ нҠ№м§•мқ„ 추м¶ңн•ҳлҸ„лЎқ н•ҳкі , н’Җл§Ғ мёөмқҖ н•©м„ұмёөмқҙ м—°мӮ°н•ң нҠ№м§• лІЎн„°лҘј 압축н•ҳм—¬ кі„мӮ° мӢңк°„мқҙ лӢЁм¶•лҗҳлҸ„лЎқ н•ҳмҳҖлӢӨ. л§Ҳм§Җл§үмңјлЎң 추м¶ңн•ң нҠ№м§•мқ„ мҷ„м „ м—°кІ°мёөкіј м—°кІ°н•ЁмңјлЎңмҚЁ кі мһҘ лӘЁл“ңлЎң 분лҘҳн•ҳлҠ” м¶ңл Ҙ мёөмқ„ м§Җм •н•ҳмҳҖлӢӨ.
3. лҢҖмғҒ мһҘ비 л°Ҹ н•ҷмҠө лҚ°мқҙн„°
3.1 к°ҖліҖ нҡҢм „ мһҘ비мқҳ м„јм„ң лҚ°мқҙн„°
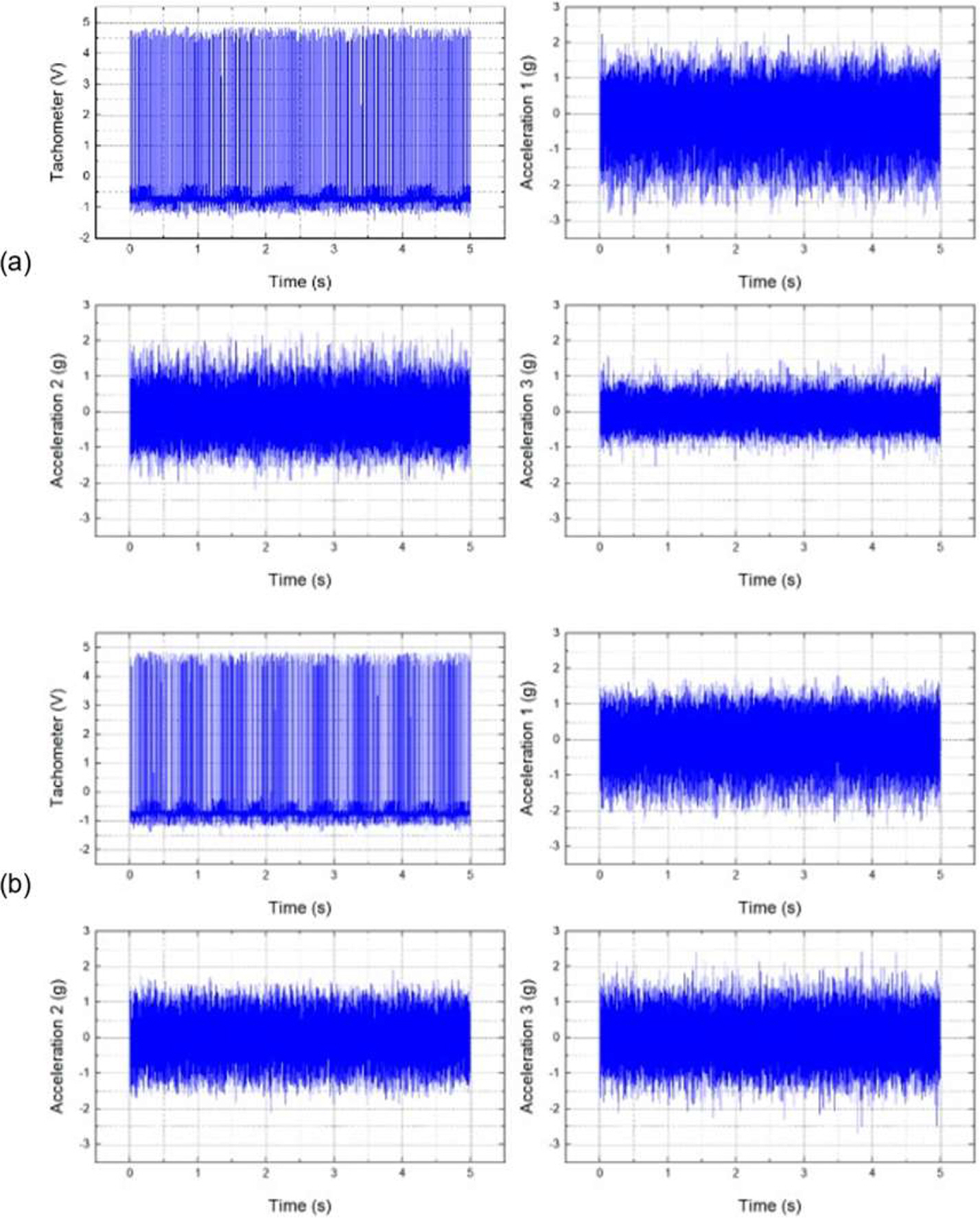
кі мһҘ н•ҷмҠөм—җлҠ” Fig. 3 м—җ ліҙмқё кІ°н•Ё лӘЁмқҳмӢӨн—ҳмһҘ비м—җм„ң кі„мёЎн•ң MAFAULDA (Machinery fault database) лҚ°мқҙн„°лҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ(de Lima et al., 2013). MAFAULDA лҠ” к°ҖліҖ нҡҢм „кё°кё°мқҳ кі мһҘ 진лӢЁм—җм„ң м•Ңкі лҰ¬мҰҳ 비көҗ кІҖмҰқ л°Ҹ м •нҷ•м„ұ лІӨм№ҳл§ҲнҒ¬м—җ л„җлҰ¬ мӮ¬мҡ©лҗҳкі мһҲлӢӨ (Ali et al., 2019). лӘЁмқҳмӢӨн—ҳмһҘ비лҠ” лӘЁн„°, 축, лІ м–ҙл§Ғ л“ұмңјлЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©°, 2 к°ңмқҳ лІ м–ҙл§Ғм—җ к°ҖмҶҚлҸ„ м„јм„ңлҘј к°Ғк°Ғ л¶Җм°©н•ҳм—¬ 3 л°©н–Ҙмқҳ к°ҖмҶҚлҸ„лҘј кі„мёЎн•ҳмҳҖлӢӨ. 축 м •л ¬ л¶Ҳлҹү, м§Ҳлҹү л¶Ҳк· нҳ• л°Ҹ лІ м–ҙл§Ғ кІ°н•Ёмқ„ мқёмң„м ҒмңјлЎң л°ңмғқмӢңнӮӨкі , ліҖмҶҚмЎ°кұҙм—җм„ң мӢ нҳёк°Җ кі„мёЎлҗҳм—ҲлӢӨ. мҙқ 8 к°ңмқҳ мӢ нҳёлЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©°, нҡҢм „ мҶҚлҸ„кі„, 6 к°ңмқҳ к°ҖмҶҚлҸ„кі„, мқҢн–Ҙ м„јм„ңлЎңл¶Җн„° мҙҲлӢ№ 50kHz лЎң мӢ нҳёк°Җ кё°лЎқлҗҳм—ҲлӢӨ. н•ҷмҠөм—җ мӮ¬мҡ©н•ң мӢ нҳёлҠ” 880 к°ңмқҳ нҢҢмқјлЎң кө¬м„ұлҗҳм–ҙ мһҲмңјл©°, к°Ғ нҢҢмқјмқҖ 5 мҙҲм”© кё°лЎқлҗҳм—ҲлӢӨ. н•ҷмҠө лҚ°мқҙн„°лҠ” лӢӨмқҢкіј к°ҷмқҙ кө¬м„ұлҗҳм–ҙ мһҲлӢӨ.
вҖў м •мғҒ: 49 к°ң лҚ°мқҙн„°лЎң кө¬м„ұлҗЁ (н–үл ¬= 12,250,000Г—8)
вҖў м§Ҳлҹү л¶Ҳк· нҳ•: л¶Ҳк· нҳ• м§Ҳлҹү(6~35 g) 축м—җ л¶Җк°Җлҗң 333 к°ң лҚ°мқҙн„° (н–үл ¬= 83,250,000Г—8)
вҖў мҲҳнҸү축 м •л ¬ л¶Ҳлҹү: 0.5~2.0mm мқҳ мҲҳнҸү 축 нҺёмӢ¬мқҙ л¶Җк°Җлҗң 197 к°ңмқҳ мғҳн”Ң(н–үл ¬= 49,250,000Г—8)
вҖў мҲҳм§Ғ축 м •л ¬ л¶Ҳлҹү: мҲҳм§Ғ 축 нҺёмӢ¬ (0.51~1.90mm)мқҙ л§Ңл“Өм–ҙ진, 301 к°ңмқҳ мғҳн”Ң(н–үл ¬=75,250,000Г—8)
3.2 кі„мёЎ мӢ нҳёмқҳ м„ н–ү 분м„қ
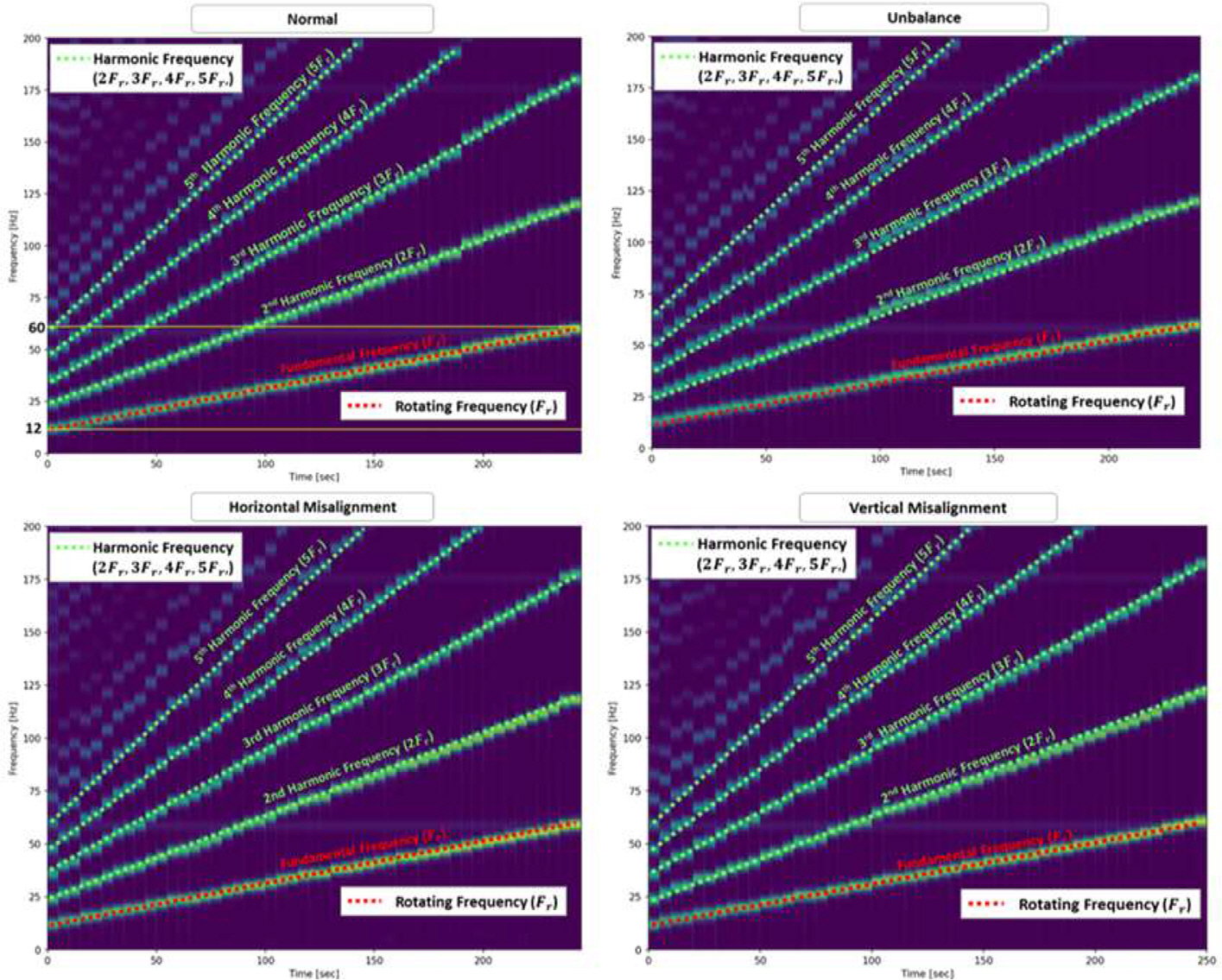
м •мғҒ мғҒнғңмҷҖ 축 м •л ¬л¶Ҳлҹү мғҒнғңмқҳ мқјл¶ҖлҘј Fig. 4 м—җ ліҙмҳҖлӢӨ. кі мһҘ мў…лҘҳм—җ л”°лқј 진нҸӯ м°Ёмқҙк°Җ мЎҙмһ¬н–ҲмңјлӮҳ мңЎм•ҲмңјлЎң кі мһҘмқ„ мӢқлі„н•ҳкё°лҠ” м–ҙл Өмӣ лӢӨ. нҡҢм „мҲҳ ліҖнҷ”лҘј нҢҢм•…н•ҳкё° мң„н•ҳм—¬ к°ҖмҶҚлҸ„ мӢ нҳёлҘј STFT лЎң 분м„қн•ҳмҳҖмңјл©°, Fig. 5 м—җ кІ°кіјлҘј м ңмӢңн•ҳмҳҖлӢӨ. нҡҢм „ мЈјнҢҢмҲҳлҠ” м•Ҫ 12 Hz м—җм„ң 60Hz к№Ңм§Җ м„ нҳ•м ҒмңјлЎң мҰқк°Җн•ҳмҳҖмңјл©°, нҡҢм „мҶҚлҸ„ ліҖнҷ”лҠ” 12 RPM/s лЎң кі„мӮ°лҗҳм—ҲлӢӨ.
3.3 лҚ°мқҙн„° м „мІҳлҰ¬ л°Ҹ нҠ№м§• 추м¶ң
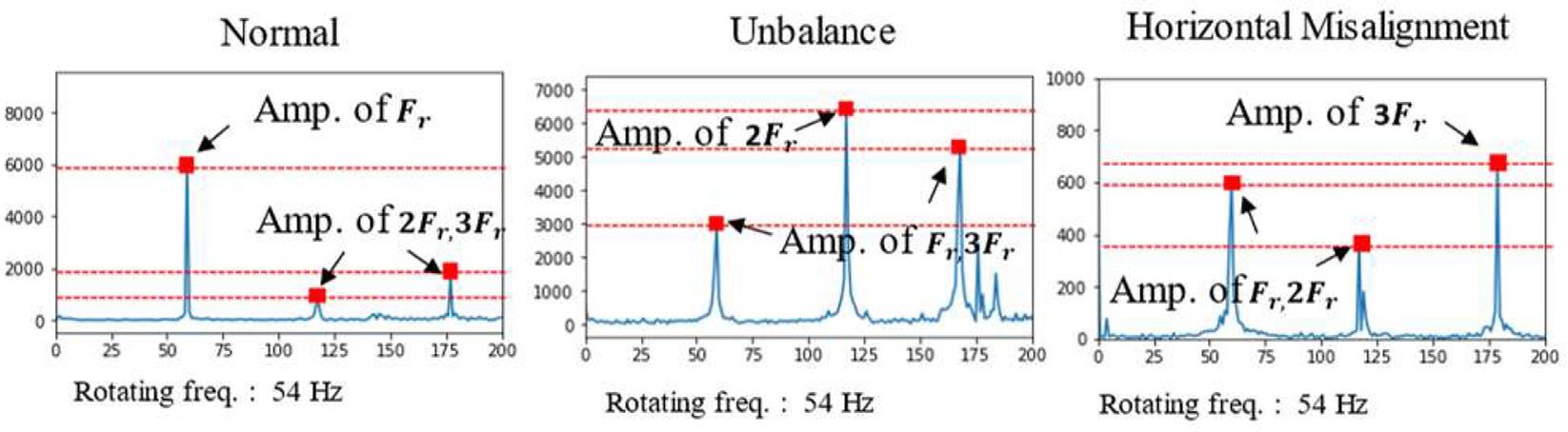
лЁјм Җ, н•ҷмҠө лҚ°мқҙн„° мӨ‘ м •мғҒ мғҳн”Ңкіј кі мһҘ мғҳн”Ңмқ„ к°Ғк°Ғ вҖҳNormalвҖҷ, вҖҳAnomalyвҖҷ л Ҳмқҙлё”мқ„ л¶Җм—¬н•ҳмҳҖмңјл©°, кі мһҘ мң нҳ• лі„лЎң л Ҳмқҙлё”мқ„ 추к°ҖлЎң л¶Җм—¬н•ҳмҳҖлӢӨ. мӣҗ мӢ нҳёлҠ” 1мҙҲлЎң л¶„н• н•ҳкі , к°Ғ мӢңл¶„н• к°„кІ©м—җм„ң кі„мӮ°н•ң нҶөкі„ к°’мқ„ мӢңкі„м—ҙ лІЎн„°лЎң кө¬м„ұн•ҳмҳҖлӢӨ. нҶөкі„ к°’мңјлЎңлҠ” м ҲлҢ“к°’ нҸүк· (xabs), мӢӨнҡЁм№ҳ(xrms), мҷңлҸ„(xskew), мІЁлҸ„(xkurt)лҘј м„ нғқн•ҳм—¬ нҠ№м§• лІЎн„°лҘј кө¬м„ұн•ҳмҳҖлӢӨ. Pestana-Viana et al.(2016)лҠ” MAFULDA лҚ°мқҙн„°лЎңл¶Җн„° нҶөкі„м Ғ мҶҚм„ұ л§Ңмқ„ нҠ№м§• лІЎн„°лЎң м„ нғқн•ҳм—¬ мӢ кІҪл§қ м•Ңкі лҰ¬мҰҳм—җ м Ғмҡ©н•ҳм—¬ кі мһҘмқ„ 진лӢЁн•ҳл©ҙ м•Ҫ 81.2%мқҳ м •нҷ•лҸ„лҘј ліҙмһ„мқ„ м ңмӢңн•ҳмҳҖлӢӨ. мқҙлҠ” нҡҢм „мҲҳ(мЈјнҢҢмҲҳ) ліҖнҷ”мқҳ мҶҚм„ұмқҙ нҸ¬н•Ёлҗҳм§Җ м•ҠмқҖ кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. л”°лқјм„ң ліё м—°кө¬м—җм„ңлҠ” кі мһҘ мң нҳ•м—җ л”°лқј мЈјнҢҢмҲҳ к°„мқҳ мғҒлҢҖм Ғмқё 진нҸӯм°Ёмқҙк°Җ мһҲлҠ” кІғмқ„ кі л Өн•ҳм—¬, кі мң мЈјнҢҢмҲҳ(Fr)мҷҖ мЎ°нҷ” мЈјнҢҢмҲҳ(2Fr,3Fr)мқҳ 진нҸӯмқ„ мЈјнҢҢмҲҳ нҠ№м„ұ к°’мңјлЎң 추к°ҖлЎң м Ғмҡ©н•ҳмҳҖлӢӨ. Fig. 6мқҖ мЎ°нҷ” мЈјнҢҢмҲҳ лі„лЎң 진нҸӯмқ„ ліҙмқё кІғмқҙлӢӨ. л”°лқјм„ң, Table 2м—җ ліҙмқё кІғкіј к°ҷмқҙ к°Ғ 진лҸҷ мӢ нҳё лі„лЎң 7к°ңмқҳ нҶөкі„ мҶҚм„ұкіј мЎ°нҷ” мЈјнҢҢмҲҳ мҶҚм„ұ к°’мңјлЎң нҠ№м§• лІЎн„°лҘј кө¬м„ұн•ҳмҳҖкі , 6к°ңмқҳ 진лҸҷ лҚ°мқҙн„°лҘј л°ҳмҳҒн•ҳм—¬ лӘЁл‘җ 42к°ңмқҳ нҠ№м§• лІЎн„°(fraw)мқ„ 추м¶ңн•ҳмҳҖлӢӨ.
3.4 нҠ№м§• лІЎн„°мқҳ м •к·ңнҷ”
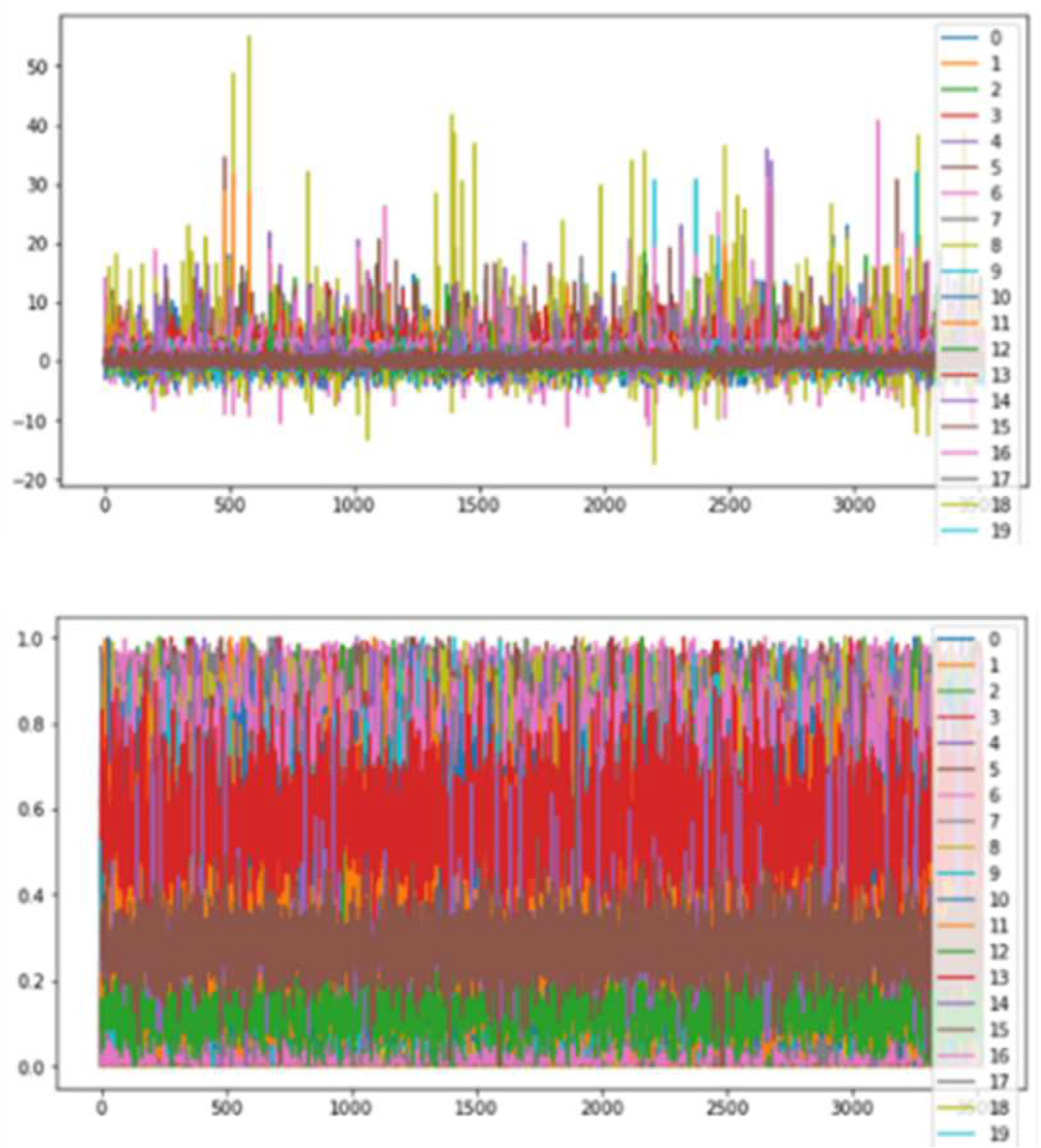
м•һм Ҳм—җм„ң кө¬н•ң нҠ№м§• лІЎн„°(fraw)лҠ” кіјм Ғн•©мқ„ мқјмңјнӮ¬ мҲҳ мһҲмңјлҜҖлЎң, м№ҙмқҙ м ңкіұ(Chi-square, ПҮ2) нҠ№м§•м„ нғқ л°Ҹ мЈјм„ұ분 분м„қмқ„ м Ғмҡ©н•ҳм—¬ к°Ғк°Ғ мғҒмң„ мғҒкҙҖлҸ„лҘј к°Җ진 10к°ңмқҳ м№ҙмқҙ м ңкіұ кё°л°ҳ нҠ№м§• лІЎн„°(fChi)мҷҖ м°Ёмӣҗ 축мҶҢлҗң нҠ№м§• лІЎн„°(fPCA)лҘј н•ҷмҠө лҚ°мқҙн„°лЎң мқҙмҡ©н•ҳмҳҖлӢӨ. к°Ғ нҠ№м§•лІЎн„°м—җ Robust л°Ҹ MinmaxмҠӨмјҖмқјл§Ғмқ„ м Ғмҡ©н•ҳмҳҖмңјл©°, Fig. 7м—җ к·ё кІ°кіјлҘј м ңмӢңн•ҳмҳҖлӢӨ.
4. кі мһҘ 진лӢЁ кіјм • л°Ҹ кІ°кіј
4.1 мҙҲл§Өк°ңліҖмҲҳ мөңм Ғнҷ”
k-л¶„н• көҗм°Ё кІҖмҰқ(k-Fold cross validation)кіј кІ©мһҗ нғҗмғү(Grid search)мқ„ мӮ¬мҡ©н•ҳм—¬ мҙҲл§Өк°ңліҖмҲҳлҘј мөңм Ғнҷ”н•ҳмҳҖлӢӨ (Bui et al., 2012; Refaeilzadeh et al., 2009). мқҙ кіјм •м—җм„ң k-NNмқҳ л§Өк°ң ліҖмҲҳлЎң n_neighborsлҠ” [1~9], weightsлҠ” [uniform, distance]лҘј мӮ¬мҡ©н•ҳкі , к°ҖмӨ‘м№ҳ кІ°м • м•Ңкі лҰ¬мҰҳмқҖ ball_treeмҷҖ kd_tree л°Ҹ bruteлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. GridSearchмқҳ cv = 3, refit = True, return_train_score = True лЎң м„Өм •н•ҳмҳҖлӢӨ. мҰү, 3-л¶„н• көҗм°Ё кІҖмҰқмқ„ м Ғмҡ©н•ҳмҳҖмңјл©°, лӘЁл“ н•ҳмң„ 집합мқ„ нӣҲл Ё 집합мңјлЎң л§Ңл“Ө л•Ңк№Ңм§Җ л°ҳліөн•ҳм—¬ к°Ғ мӢңн–үл§ҲлӢӨ лӘЁлҚёмқҳ м„ұлҠҘмқ„ кі„мӮ°н•ҳмҳҖлӢӨ. k-NN, SVM, Random forestмқҳ к°Ғ мҙҲл§Өк°ңліҖмҲҳмҷҖ мөңм Ғнҷ” кІ°кіјлҘј Table 3,4,5м—җ м •лҰ¬н•ҳмҳҖлӢӨ. м—¬кё°м„ң, SVMмқҳ CмҷҖ GammaлҠ” к°Ғк°Ғ мҳӨлҘҳ н—Ҳмҡ© ліҖмҲҳ л°Ҹ кІ°м • кІҪкі„мқҳ ліөмһЎлҸ„мҷҖ кҙҖл Ёлҗң ліҖмҲҳмқҙлӢӨ. Random forestмқҳ n_estimators, max_depthлҠ” к°Ғк°Ғ кІ°м • нҠёлҰ¬ к°ңмҲҳ л°Ҹ мөңлҢҖ к№ҠмқҙлҘј мқҳлҜён•ңлӢӨ.
4.2 мқҙмғҒк°җм§Җ м Ғмҡ© кІ°кіј
мқҙмғҒк°җм§Җм—җлҠ” лЁјм Җ кё°кі„н•ҷмҠө лӘЁлҚёмқ„ м Ғмҡ©н•ҳмҳҖлӢӨ. fraw, fChi, fPCA мқҳ нҠ№м§• лІЎн„°лҘј н•ҷмҠөм—җ мӮ¬мҡ©н•ҳмҳҖмңјл©°, м„ёк°Җм§Җ мў…лҘҳмқҳ кі мһҘ мӢ нҳём—җ мқҙмғҒ л Ҳмқҙлё”мқ„ м§Җм •н•ҳмҳҖлӢӨ. Table 6м—җ к°Ғ м•Ңкі лҰ¬мҰҳкіј н•ҷмҠө лІЎн„° лі„лЎң мҳҲмёЎ м„ұлҠҘмқ„ м •лҰ¬н•ҳмҳҖлӢӨ. frawлЎң н•ҷмҠөн•ҳмҳҖмқ„ л•Ң 분лҘҳ м•Ңкі лҰ¬мҰҳмқҳ мқҙмғҒ к°җм§Җ м„ұлҠҘмқҙ к°ҖмһҘ лҶ’кі fPCAлҠ” м•Ҫк°„ лӮ®мқҖ м„ұлҠҘмқ„ ліҙмҳҖмңјлӮҳ, м •нҷ•м„ұ м°ЁмқҙлҠ” нҒ¬м§Җ м•ҠмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
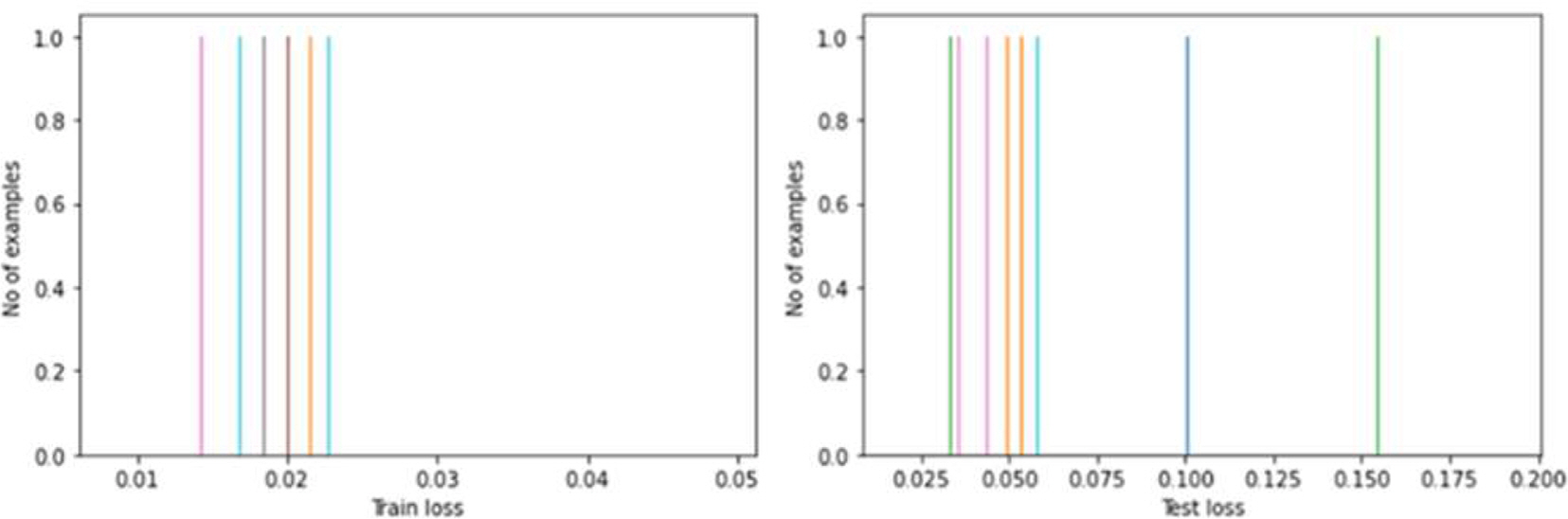
лӢӨмқҢмңјлЎң мҳӨнҶ мқёмҪ”лҚ”лҘј м Ғмҡ©н•ҳм—¬ мқҙмғҒ к°җм§ҖлҘј мҲҳн–үн•ҳмҳҖмңјл©°, н•ҷмҠөмқҳ мһ…л Ҙ мёөмңјлЎң frawлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. лӢЁ, м •мғҒ мғҳн”Ңкіј л№„м •мғҒ мғҳн”Ңмқҳ 비мңЁмқҙ 245:4,155мңјлЎң л¶Ҳк· нҳ•мқҙ мӢ¬н•ҳмҳҖмңјлҜҖлЎң SMOTE кё°лІ•(Chawla et al., 2002)мқ„ мӮ¬мҡ©н•ҳм—¬ кіјм„ нғқ (Over sampling)мқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. л§Өк°ң ліҖмҲҳлҠ” sampling strategy=auto, k_neighbors=5, random stateлҘј м„ нғқн•ҳкі , Sampling_strategy=not majorityлЎңмҚЁ лӢӨмҲҳнҒҙлһҳмҠӨм—җ л§һм¶° н•ҳмң„ нҒҙлһҳмҠӨлҘј кіјм„ нғқ н•ҳмҳҖлӢӨ. SMOTEмқ„ м Ғмҡ©н•ң кІ°кіј м •мғҒкіј л№„м •мғҒ мғҳн”Ңмқҳ 비мңЁмқ„ 4,155:4,155лЎң кө¬м„ұлҗҳм—ҲлӢӨ. мһ¬мғқм„ұ мҳӨм°Ё к°’мқҖ MAEлҘј мӮ¬мҡ©н–Ҳмңјл©°, Fig. 8мқҖ к°Ғк°Ғ м •мғҒ мғҳн”Ңкіј мқҙмғҒ мғҳн”Ңмқ„ н•ҷмҠөмӢңмј°мқ„ л•Ң кі„мӮ°лҗң мһ¬мғқм„ұ мҳӨм°Ёмқҳ нһҲмҠӨнҶ к·ёлһЁмқҙлӢӨ. м •мғҒ мғҳн”Ңкіј мқҙмғҒ мғҳн”Ңмқҳ MAEк°’мқҖ к°Ғк°Ғ 0.014~0.023кіј 0.03~0.155мқҳ 분нҸ¬лҘј ліҙмҳҖлӢӨ. мһ„кі„м җмқҖ м •мғҒ мғҳн”Ңмқҳ MAE нҸүк· к°’м—җ 2л°°мқҳ н‘ңмӨҖнҺём°ЁлҘј лҚ”н•ҙ 0.03лЎң м„Өм •н–Ҳмңјл©°, мһ„кі„м җмқ„ мҙҲкіјн•ҳлҠ” MAEлҘј мғқм„ұн•ҳлҠ” мғҳн”Ңмқ„ л№„м •мғҒ мғҒнғңлЎң 분лҘҳн–ҲлӢӨ. мҳӨнҶ мқёмҪ”лҚ” кё°л°ҳ мқҙмғҒк°җм§Җ лӘЁлҚёмқҳ мқҙмғҒк°җм§Җ м„ұлҠҘмқҖ Table 7мҷҖ к°ҷмқҙ кі„мӮ°лҗҳм—ҲлӢӨ.
4.4 кі мһҘ진лӢЁ лӘЁлҚёкіј н•ҷмҠө кІ°кіј
ліё м ҲмқҖ кё°кі„н•ҷмҠөкіј н•©м„ұкіұ м•Ңкі лҰ¬мҰҳмқ„ м Ғмҡ©н•ң кі мһҘ мҳҲмёЎ кІ°кіјлҘј м •лҰ¬н•ҳмҳҖлӢӨ. Table 8м—җ м•Ңкі лҰ¬мҰҳ лі„ кі мһҘ진лӢЁ м •нҷ•лҸ„лҘј м •лҰ¬н•ҳмҳҖмңјл©°, нҠ№м§• лІЎн„° frawк°Җ лӘЁл“ м•Ңкі лҰ¬мҰҳ лӮҙм—җм„ң к°ҖмһҘ мҡ°мҲҳн•ң мҳҲмёЎ м„ұлҠҘмқ„ ліҙм—¬мЈјм—ҲлӢӨ. м„ұлҠҘ нҸүк· мқҖ Random forest(99.79%), SVM(99.78%), k-NN(99.42%) мҲңмңјлЎң кі„мӮ°лҗҳм—ҲлӢӨ.
лӢӨмқҢмңјлЎң, Conv1DлЎң кі мһҘ진лӢЁ лӘЁлҚёмқ„ кө¬м„ұн•ҳмҳҖмңјл©°, к°Ғ м Ғмёө кө¬мЎ°лҘј Table 9м—җ м •лҰ¬н•ҳмҳҖлӢӨ. 진лҸҷ мӢ нҳём—җ м ҖмЈјнҢҢ нҶөкіј н•„н„°лҘј мӮ¬мҡ©н•ҳкі , 1.0 kHzлЎң лӢӨмҡҙ мғҳн”Ңл§Ғн•ҳм—¬ мһ…л Ҙ мёөмңјлЎң мӮ¬мҡ©н•ҳмҳҖлӢӨ. Conv1DлҠ” 99.55%мқҳ нҸүк· м„ұлҠҘмңјлЎң кі мһҘмқ„ к°җм§Җн•ҳмҳҖлӢӨ. Random ForestмҷҖ SVM лӘЁлҚёмқҳ 분лҘҳ м„ұлҠҘмқҙ Conv1D лӘЁлҚёліҙлӢӨ мҡ°мҲҳн•ҳмҳҖмңјлӮҳ, к°’мқҳ м°ЁмқҙлҠ” нҒ¬м§Җ м•ҠмқҢмқ„ м•Ң мҲҳ мһҲлӢӨ. л”°лқјм„ң ліҖлҸҷ мҶҚлҸ„лҘј к°Җ진 нҡҢм „кё°кё°мқҳ кі мһҘ진лӢЁм—җм„ң мЈјнҢҢмҲҳ мҶҚм„ұмқ„ нҠ№м§•м—җ нҸ¬н•Ён•ңлӢӨл©ҙ, кё°кі„н•ҷмҠөлҸ„ н•©м„ұкіұ м•Ңкі лҰ¬мҰҳкіј лҸҷл“ұн•ң мҲҳмӨҖмқҳ м •нҷ•лҸ„лЎң 진лӢЁн• мҲҳ мһҲмқҢмқ„ нҷ•мқён• мҲҳ мһҲм—ҲлӢӨ. Conv1D л°©лІ•мқҖ лҲ„м Ғлҗң кі„мёЎ мӢ нҳёлҘј н•ҷмҠөн•ҳлҠ” кіјм •м—җ л§ҺмқҖ м—°мӮ° мӢңк°„мқҙ н•„мҡ”н•ң л°ҳл©ҙм—җ кё°кі„н•ҷмҠөмқҖ мӨҖ비лҗң н•ҷмҠөмһҗк°Җ мӢӨмӢңк°„м—җ к°Җк№қкІҢ 진лӢЁмқ„ мҲҳн–үн• мҲҳ мһҲлҠ” мһҘм җмқҙ мһҲлӢӨлҠ” м җмқ„ к°җм•Ҳн•ҳл©ҙ, м Ғм Ҳн•ң нҠ№м§• лІЎн„°лҘј л°ҳмҳҒн•ң кё°кі„н•ҷмҠөмқҙ ліҖмҶҚмЎ°кұҙмқҳ кі мһҘ진лӢЁм—җ м Ғмҡ©лҗ мҲҳ мһҲмқҢмқ„ м•Ң мҲҳ мһҲлӢӨ.
5. кІ°лЎ
ліё л…јл¬ём—җм„ңлҠ” ліҖлҸҷ мҶҚлҸ„лҘј к°Җ진 нҡҢм „кё°кё°мқҳ мқҙмғҒ 진лӢЁ л°Ҹ кі мһҘ진лӢЁ мҳҲлҘј м ңмӢңн•ҳмҳҖлӢӨ. ліҖлҸҷ мҶҚлҸ„ мЎ°кұҙн•ҳм—җ мӢӨн—ҳлҗң кі мһҘ мӢң뮬л Ҳмқҙн„°мқҳ лҚ°мқҙн„°лҘј н•ҷмҠө лҢҖмғҒмңјлЎң мӮ¬мҡ©н•ҳмҳҖлӢӨ. мқҙмғҒк°җм§Җм—җм„ңлҠ” мҳӨнҶ мқёмҪ”лҚ”к°Җ кё°кі„н•ҷмҠөліҙлӢӨ м •нҷ•лҸ„к°Җ л–Ём–ҙмЎҢмңјлӮҳ, л№„м •мғҒ лҚ°мқҙн„°к°Җ м—ҶлҠ” кІҪмҡ°м—җлҠ” нҷңмҡ©н• мҲҳ мһҲлҠ” м •нҷ•м„ұмқ„ ліҙмқё кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ. кі мһҘ 진лӢЁм—җлҠ” кё°кі„н•ҷмҠөкіј Conv1DлҘј м Ғмҡ©н•ҳм—¬ к°Ғк°Ғмқҳ м •нҷ•м„ұмқ„ 비көҗн•ҳмҳҖлӢӨ. мқҙ кіјм •м—җм„ң нҠ№м§• м„ нғқм—җм„ң мЈјнҢҢмҲҳ мҶҚм„ұмқ„ 추к°Җн•ЁмңјлЎңмҚЁ кё°кі„н•ҷмҠөмқҳ 진лӢЁ м •нҷ•лҸ„к°Җ Conv1Dмқҳ м„ұлҠҘкіј мң мӮ¬н•ҳкұ°лӮҳ лҚ” мҡ°мҲҳн• мҲҳ мһҲмқҢмқ„ м ңмӢңн•ҳмҳҖлӢӨ. нҠ№нһҲ, мЎ°нҷ”мЈјнҢҢмҲҳ лі„лЎң мғҒлҢҖм Ғ 진нҸӯ ліҖнҷ”лҘј нҠ№м§• лІЎн„°м—җ л°ҳмҳҒн•ҳм—¬ л№„м •мғҒм„ұмқҙ кі л Өлҗ мҲҳ мһҲмқҢмқ„ ліҙмҳҖлӢӨ. лӢӨл§Ң, мӢӨм ң мһҘ비лҠ” ліөмһЎн•ң мЎ°лҰҪ кө¬мЎ°лҘј к°Җм§җм—җ л”°лқј мӢ нҳём—җ мһЎмқҢмқҙ л§Һмңјл©°, нҡҢм „мҶҚлҸ„мҷҖ н•ҳмӨ‘мқҳ ліҖлҸҷмңјлЎң мқён•ҙ л№„м •мғҒм„ұмқҙ нӣЁм”¬ лҶ’мқҖ мӢ нҳёк°Җ кі„мёЎлҗ кІғмңјлЎң мҳҲмғҒлҗңлӢӨ. л”°лқјм„ң м ңм•Ҳлҗң м•Ңкі лҰ¬мҰҳмқ„ мӢӨм ң мҡҙмҳҒ мһҘ비м—җ м Ғмҡ©н•ҳкё° мң„н•ҙм„ңлҠ” мһЎмқҢ м ңкұ° л°©м•Ҳ, лҶ’мқҖ л№„м •мғҒм„ұмқ„ кі л Өн•ң м „мІҳлҰ¬ л°Ҹ м Ғм Ҳн•ң нҠ№м§• 추м¶ңмқҙ 추к°ҖлЎң н•„мҡ”н• кІғмңјлЎң нҢҗлӢЁлҗңлӢӨ.

 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






