


1. 서 론
바다 위를 항해하는 전통적인 선박에 더하여 해공, 해상, 해중을 항행하는 자율 운항 모빌리티까지 바다 공간에서의 자율적 이동성에 관한 요구가 증가하고 있고 이를 구현하는데 필요한 바다에서의 초고속 통신 요구는 더욱 중요해지고 있다.
IMO(International Maritime Organization), 국제해사기구의 MASS(Maritime Autonomous Surface Ship) 개발 움직임, 국내외의 무인선 개발 프로젝트, 더 나아가 국내에서 기획 중인 해양 모빌리티 개발 등은 해상 모빌리티의 자율적 운항 및 그에 따른 안전, 효율 향상을 위한 다양한 응용 프로그램 및 시스템을 제시하고 있고 이를 실현하기 위한 통신을 필요로 한다. 최근 주목받고 있는 LTE 기반의 초고속 해상무선통신망 관련하여 LTE 기술의 특징 중 하나인 D2D(Device to Device) 기능으로 해양 모빌리티 간 직접통신이 가능하지만, LTE D2D는 주파수 재활용 및 간섭 등의 기술적 난제와 서비스 제공 사업자의 비즈니스적 판단 유보 등으로 인해 상용화되지 못하고 있어 실질적인 기술 적용과 관련 시스템 개발은 불가한 현실이다.
선박과 선박 간 직접통신은 기존 VHF무전을 통한 상호 교신 및 선박 통항 안전의 기능을 넘어 향후 예상되는 자율운항 선박 및 무인선 등의 자율 환경에서 자율기기 간 상호 통신을 담당해야 한다. 이를 위한 국내외의 다양한 연구로부터 기존 레거시 해상통신 시스템으로는 불가능한 수준의 선박 간 직접통신 요구가 발생하고 있어 이에 대한 통신 기술 개발이 필요하다. 특히 선박의 안전을 위해서는 최고 우선순위로 선박과 선박 간 통신에 고용량 통신이 필요하고 부가적으로 선박 주변 항해 인프라(항로표지 등) 및 요구조자와의 통신도 가능해야 한다. 이러한 선박을 중심으로 하는 직접통신의 필요성을 압축하여 선박중심 직접통신이란 용어를 제시한다.
Kang(2019)연구와 같이 앞서 언급한 선박을 중심으로 하는 다양한 직접통신을 통칭하여 M-S2X(Maritime S2X) 통신이라 할 수 있고 S2X 통신은 기존 AIS(Automatic Identification System)등의 해상 통신보다 높은 성능을 가져야 하므로 VDE(VHF Data Exchange) 기술 또는 이보다 빠른 통신을 가능하게 하는 고 주파수에서의 광대역 기반 통신 기술을 사용해야 한다.
본 논문은 기존 해상 모바일 서비스에 할당된 300㎒ 이하의 대역보다 높은 고 주파수(이하 MX) 기반 광대역 통신 기술을 활용하는 MX-S2X 통신을 개발하기 위해 고 주파수 대역을 해상에서 사용할 경우 예상되는 해수면에 의한 다중경로 페이딩 영향을 최소화하는 방안을 적용한 MX-S2X 통신의 물리계층 설계와 성능분석을 수행하여 향후 개발방안을 제시한다.
2. MX-S2X 필요성
2.1 유럽연합 MUNIN 프로젝트
지난 2012년에 보고서를 발간한 MUNIN 프로젝트에서는 자율운항선박의 운용에 필요한 통신 요구사항을 분석하여 자율운항선박에 유인선박이 접근하는 랑데부(Rendezvous), 원격 제어(Remote Control), 정보 전송(Telemetry), 레이더 타겟(Radar Targets) 및 HD급 영상(HD Video)의 통신 하한 요구사항을 표 1과 같이 제시하였다.(MUNIN, 2012)
표 1에서 제시한 랑데부, 원격제어 등 통신 요구속도는 기존 레거시 해상통신 시스템으로도 수용 가능한 낮은 수준으로 볼 수 있다. 하지만 최근 자율운항선박의 주변 상황 인식, 수집 정보 교환 수요, 디지털 트윈과 같은 육상 모니터링을 고려하면 요구속도는 Mbps급으로 크게 상향되어야 한다.
2.2 기타 관련 연구
해상 사고는 발생할 경우 대형 피해를 야기하므로 선박의 자율화, 자동화의 수준이 높을수록 더 높은 통신 성능을 가져야 하며 두 관계에 대한 비용-효율적 비교가 중요하다(Zolich et al., 2018)
Namgung(2019)에서는 자율운항선박에 필요한 통신 용량을 산정하기 위해 통신 기지국 당 자율운항선박의 수, 주파수 사용 효율, 한 선박 당 요구되는 데이터 양 등을 고려한 산식을 이용하였다. 항구, 항만에서의 VTS 교신의 중요성, 충돌회피와 센서 정보 수집 등을 고려하여 자율운항선박 한 척 당 약 0.8㎒의 스펙트럼이 요구됨을 제시하고 우리나라 주요 항구의 선박 분포를 통합 적용하여 다운링크 기준 11.3㎒, 상향 링크 기준 103.9㎒의 스펙트럼이 요구됨을 제시하였다. 육상으로 데이터를 전송하는 상향 링크에 대한 대역폭이 더 많이 요구되는 이유는 현시점에서 아직 자율운항선박의 자율성이 높지 않고 육상에서의 통제가 중요하기 때문인 것으로 해석할 수 있다.
MX-S2X의 비면허대역 주파수 활용 가능성 관련하여 Kumar(2019) 연구에서는 V2X 통신 기술의 해상 사용 가능성과 함께 운용범위를 약 13km로 추정하였고, Kang et al.(2019)에서는 선박 운항자 중심의 네트워킹(S2X) 통신 기술의 개념 정립 필요성을 제기하면서 자율운항선박의 주변 상황 인식을 위한 선박 대 선박 통신에 활용 가능한 AIS 등의 포화 상황으로 인해 추가적인 통신 기술의 선제적 도입의 필요성을 강조하였다.
2.3 VDE 개발 현황
VDES(VHF Data Exchange System)는 선박과 선박, 선박과 해안국 간 AIS, ASM(Application Specific Message), VDE 데이터를 송수신하는 차세대 해상무선통신시스템으로 국제표지항로협회(IALA)에서 개발된 기술 기준인 G1139를 기반으로 2021년 ITU-R M.2092의 권고안이 배포되었다. 이 권고안은 VHF 대역의 데이터 전송을 위한 규격으로 기존의 AIS 사용에 가장 높은 우선순위를 부여하며 ASM, VDE-TER(지상파), VDE-SAT(위성)의 기술기준을 제시하고 있다. 이와 관련하여 시험 방안을 확정하기 위한 움직임이 활발하게 진행 중이며 국제전기기술위원회(IEC)의 표준화 작업이 진행 중이다.
2.4 해상환경에서의 MX-S2X 연구개발 방향
향후 해양 모빌리티와 자율운항선박 등의 활용성을 고려하면 MX-S2X 통신기술에 요구되는 데이터 전송률은 위의 표 1에 따라 최소 3Mbps급 이상이 되어야 한다. VDE 물리계층의 전송속도는 최대 307.2kbps이며, CRC를 제외한 순수 사용자 데이터만으로 계산한다면 실질적인 페이로드 전송속도는 최대 209.4kbps이다. VDE는 기존 AIS의 9.6kbps와 타 통신에 비하여 높은 통신 속도를 제공하나 자율운항선박을 위한 최소한의 요구 속도를 제공할 수 없는 수준이다.
해사 안전을 위한 통신은 다양한 형태의 모빌리티를 지원할 수 있는 통신 네트워크를 제공하여야 한다. VDES는 1분에 2,250 슬롯으로 구성되는 TDMA 네트워크를 제공하여 다수의 선박이 혼잡하게 몰리는 해역에서 슬롯 포화가 발생될 수 있다. 향후 예상되는 다수 해양 모빌리티의 네트워크 운용에 제한이 없도록 추가적인 슬롯 여유를 확보하는 등의 개선이 필요한 이유이다.
열악한 해상환경에서 다중경로 페이딩 영향은 반드시 극복되어야 하나 기존의 해상 통신기술에서는 충분한 검토가 이루어지지 않고 있는 실정이다. Kim et al.(2017), Ryu et al.(2018) 연구에서 VDE의 경우 다중경로 페이딩 영향 극복을 위해 Syncword 사용을 고려할 수 있으나 27개의 짧은 심볼로 인하여 충분한 성능을 제공할 수 없다. 그러므로 시간/주파수 동기 및 등화 기능을 위한 해상 환경에서의 영향을 분석하여 다중경로 페이딩 및 도플러 영향을 극복하기 위한 물리계층의 설계는 가장 중요한 연구개발 항목이며, 본 논문을 통해 성능 분석된 결과를 고려하여 MX-S2X에 적합한 물리계층 설계를 제시하였다.
3. MX-S2X 설계
3.1 MX-S2X 요구 사항 분석
해상 모바일 서비스 대역인 VHF대역에서 사용 가능한 VDES 통신은 최대 300kbps 급의 전송속도를 제공하여 2절의 요구사항을 일부 충족할 가능성이 있으나 MUNIN 프로젝트의 HD 비디오 전송 최소 요구 사양과 같이 초고속 통신 요구를 충족하는데 부족한 수준이다. 그러므로 통신 속도를 높일 수 있는 MX-S2X 통신 기술의 적용이 가능한 고 주파수 대역 확보가 필요하며 초기 단계로 우선 활용 가능한 대역인 ISM대역, 즉 비면허대역을 생각할 수 있다.
광대역 통신기술을 비면허대역에서 구현할 경우 제한된 송신출력으로 인해 통신 거리를 수 km 이상으로 확장하기에 한계가 있다. 이러한 한계는 국제적인 규정 관점에서 해상에서의 활용과 육상과의 간섭 해결을 전제로 출력 제한을 완화하는 방식으로 해결하거나 출력 제한은 유지하면서도 보다 먼 통신 거리 확보를 위해 스프레드 스펙트럼 방식으로 신호 송수신 감도를 높이는 방식 등을 고려할 수 있다.
MX-S2X 규격의 슬롯 구조 및 물리계층은 앞서 언급한 기존 통신 기술의 제한 요소를 극복하고 해상 운용환경을 고려하여 설계해야 한다. 앞서 논의한 해상 통신 환경 및 요구 사항을 고려하면 MX-S2X에 대한 설계 요구 사항은 다음 표 2와 같다.
3.2 해상 통신 환경 분석
MX-S2X 통신의 물리계층 설계는 기존 통신기술의 제한 요소를 극복하고 요구되는 운용환경을 만족하도록 설계되어야 한다. Kim et al.(2021)에서 VDE 실해역 시험을 통해 해상 통신의 가장 중요한 성능 저하의 원인은 다중경로 페이딩으로 식별되고 있으며, 측정된 신호의 스펙트럼은 그림 1과 같다.
위 결과는 해수면 또는 선박 인근 대형 선박 또는 지형 지물에 의한 반사파의 영향으로 대역 내의 주파수에서 선택적 페이딩 영향을 극복해야 함을 나타낸다. 해상 통신환경에서 다중경로 페이딩의 영향은 Yang(2010)의 채널 측정 결과를 활용하여 다음 표 3과 같이 정량화된 채널 모델을 적용한다.
3.3 MX-S2X 물리계층 설계
해상 통신환경 분석을 통해 확인된 다중경로 페이딩은 시간 영역에서 ISI(Inter-Symbol Interference)로 작용하고, 주파수 영역에서는 주파수의 선택적 왜곡으로 작용하여 심각한 성능 열화를 유발할 수 있다. 따라서 웨이브폼 및 슬롯 구조 설계를 통한 채널 극복 방안이 고려되어야 한다.
다중경로 페이딩에 대한 대응 방안으로 등화기(Equalizer) 사용이 고려될 수 있다. 시간영역 등화기를 적용한 SC(Single Carrier)방식 웨이브폼은 Falconer et al.(2002)에 따르면 다중경로 페이딩의 최대 지연이 길수록 신호처리에 사용되는 심볼이 길어지고 이에 비례하여 심볼 당 사용하는 곱셈기 수가 기하 급수적으로 증가하는 것으로 분석되었다. 반면 주파수 영역 등화기는 다중경로 페이딩의 최대 지연이 길어져도 심볼당 필요한 곱셈기 개수가 크게 증가하지 않으면서도 효과적인 신호처리가 가능하다. 주파수 영역 등화기를 사용하는 웨이브폼으로는 OFDM(Orthogonal Frequency Division Multiplexing) 방식과 단일반송파 웨이브폼 임에도 주파수 영역 등화기의 사용이 가능한 SC-FDE(Single Carrier Frequency Domain Equalization) 등이 있다.
OFDM은 PAPR(Peak-to-Average Power Ratio)이 커 RF 증폭기에 대한 넓은 구간의 선형성이 요구됨에 따라 고가의 비용이 소요되는 반면 SC-FDE는 단일반송파 웨이브폼과 동일한 PAPR을 갖기 때문에 OFDM보다 비용 측면에서 유리하고 물리적 H/W에 있어 소형화가 가능하다. 이상의 특징들을 종합하여 MX-S2X 물리계층의 웨이브폼은 SC-FDE 방식으로 결정하였다.
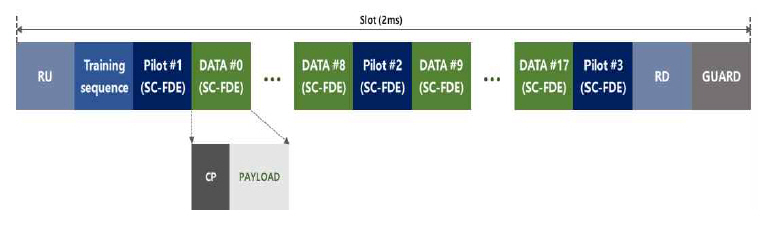
기존 SC-FDE 심볼 구조는 전송하고자 하는 데이터 심볼과 ISI 현상 방지를 위한 CP(Cyclic Prefix)구간과 채널 추정을 위한 파일럿 구간으로 구성된다. Falconer et al.(2002)와 같은 방식의 슬롯 구조에서는 매 SC-FDE 심볼마다 최적의 채널 추정성능을 위해 일정 길이 이상의 파일럿이 할당되어야 하므로 그로 인한 오버헤드가 발생한다. 본 규격 설계에서는 파일럿의 오버헤드 감소를 위해 적절한 슬롯 시간과 파일럿 전송 주기를 결정한다. 슬롯 시간의 결정은 MX-S2X가 운용되는 통신 환경의 상관 시간을 고려해야 하며 이는 선박 이동 속도에 의해 도출된다. 선박의 이동 속도 요구사항을 최대 50 ㎞/h로 가정한 경우 최대 도플러 주파수는 111.11㎐이며, 상관 시간은 약 3.8㎳다. 따라서 상관 시간을 고려해 슬롯 시간을 2 ㎳로 설계한다. 슬롯 시간이 2㎳인 경우 파일럿 전송이 여러 SC-FDE 심볼 단위로 가능하며 구조 또한 데이터 구조와 동일한 SC-FDE 심볼 형태로 적용 가능하다. 이런 경우 데이터 심볼과 동일한 FFT 크기를 가지므로 FFT 출력 결과 전체를 채널 추정 및 보상에 사용할 수 있다.
채널추정을 위한 파일럿 전송 주기는 최대 도플러 주파수 및 주파수 옵셋에 대해 고려되어야 한다. 주파수 옵셋의 요구 규격은 VDES를 참조하여 최대 주파수 옵셋 500㎐를 기준으로 적용하였다. 슬롯 시간에서 도플러 주파수를 포함한 최대 주파수 옵셋에 따른 위상 회전은 (111.11㎐ + 500㎐) × 2㎳ × 360도 = 약 440도로, 최대 추정 보상이 가능한 위상 360도를 초과하므로 약 1㎳ 단위로 파일럿을 배치해 전송한다. 따라서 MX-S2X 슬롯구조는 기본 슬롯당 3개의 파일럿을 할당하는 그림 2와 같이 구성된다.
데이터 전송 요구조건(≥ 3Mbps)을 만족하기 위하여 슬롯당 18개의 데이터 심볼을 할당하며, 채널 코덱은 CTC (Convolutional Turbo Code) 1/2, QPSK 변조 방식, 심볼율은 약 6.144㎒로, 슬롯 시간은 초당 500개의 슬롯이 할당되도록 설계를 고려하면 데이터 전송률은 4.448Mbps가 가능하다.
SC-FDE용 CP 길이는 채널 응답에서 유효 성분 중 최대 지연보다 크게 설계하여 다중경로에 의한 ISI 영향을 제거하기 위함이다(Yang, 2007). 해상 환경에서의 채널 응답을 측정한 Yang(2010)에 의하면 고려해야 할 최대 지연 시간은 2.2㎲이며 이는 국내 해상 환경도 비슷할 것으로 추정하여 CP 길이는 2.6㎲로 설계하며 심볼율 기준 16심볼로 할당한다. 이상의 설계 내용을 정리하면 다음 표 4와 같다.
3.4 MX-S2X 송수신 기능 블록 설계
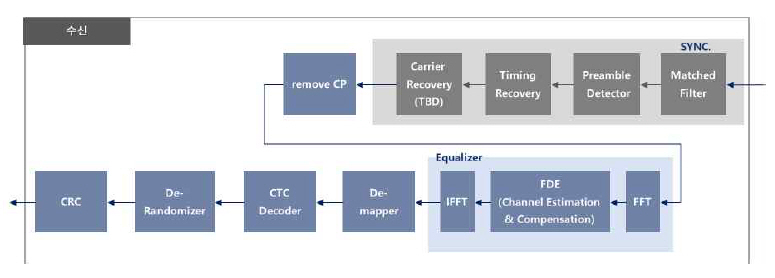
모의시험에 적용한 VDE 물리계층의 송수신 기능블록은 IALA(2020)에 따른 일반적인 구성으로, Kim et al.(2017)에 제시된 바와 같이 구성한다. MX-S2X 물리계층의 송수신 기능 블록은 그림 3, 4와 같다.
그림 4에서 ‘remove CP’, ‘FFT’, ‘FDE(Frequency Domain Equalizer)’, ‘IFFT’블록은 SC-FDE 웨이브폼 수신기를 구성하며, ‘remove CP’블록은 CP 심볼을 제거하여 ISI영향을 감소시키고, FDE 블록은 주파수 영역에서 채널추정 및 보상을 수행하며 IFFT 블록은 주파수 영역에서 채널 보상된 신호를 다시 시간영역 심볼로 변환하는 기능을 수행한다.
3.5 채널 추정 알고리즘
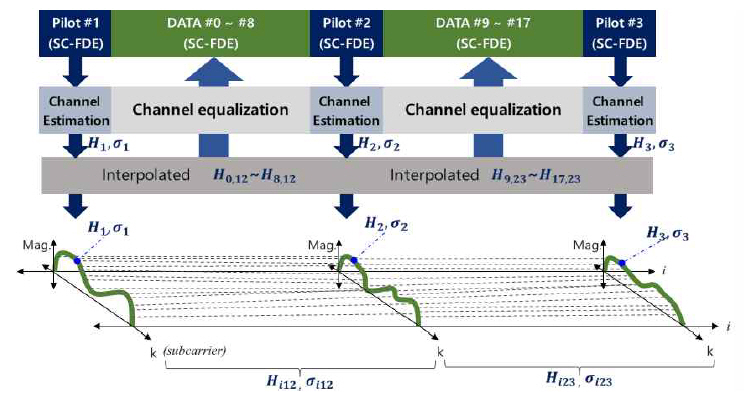
채널 추정을 위해 전술한 바와 같이 슬롯의 앞, 중간, 뒤에 각각 파일럿을 배치하며 각각 Pilot #1 #,2 #,3으로 지정한다. 이와 같이 일정 간격으로 배치된 파일럿은 각각 주파수 영역에서 채널 추정 후 선형 보간하여 파일럿 사이에 있는 데이터에 대한 FFT 출력 보정에 사용한다. Pilot #1에서 채널 추정한 결과 H1과 Pilot #2에서 채널 추정한 결과 H2는 선형 보간하여 Hi12를 도출하는데 사용된다. 이와 같은 방식으로 동작하기 위한 Pilot 배치 및 활용은 그림 5와 같다.
채널 추정 방식은 주파수영역 최소자승(Least Square : LS) 추정방식이며 채널 추정 및 보상을 위한 연산과정은 다음의 식들과 같다.
식(1)에서 Hj(k)는 j번째 수신된 파일럿 Ri(k)와 송신파일럿 Sj(k)에 대한 LS연산 결과로 획득되는 채널 추정 결과이며, k는 subcarrier번호로 FFT출력 번호에 해당한다. 식(2) 및 (3)은 Hj(k)에 대한 선형 보간 방식을 나타내며 C는 파일럿과 파일럿 사이의 데이터 심볼 개수+1에 해당하며 위치에 따라 왼쪽 파일럿과 오른쪽 파일럿의 채널 추정 결과 반영 비중이 변화한다. H1, H2, H3은 pilot #1, #2, #3로부터 획득한 LS연산 결과이다. 식(4) 및 (5)는 noise variance에 대한 선형 보간 방식을 나타내며 σ1,σ2,σ3은 pilot #1, #2, #3로부터 획득한 noise variance 결과이다. 식(6)은 Hiq(k) 와 noise variance를 이용하여 LMMSE(Linear Minimum Mean Square Error)방식을 적용한 데이터구간 채널보상 필터 H’iq(k)의 도출 과정을 보여준다. 그리고 식(2)∼식(6)에서 ’12’로 표기된 변수는 각각 pilot#1과 #2간 선형 보간된 결과이며, ‘23’은 pilot#2와 pilot#3간 선형 보간 결과에 해당한다. H’iq(k)는 식(7)과 같이 수신한 Ri(k)에 나눔으로 주파수 영역에서 채널 보상한 신호 R’i(k)를 획득한다.
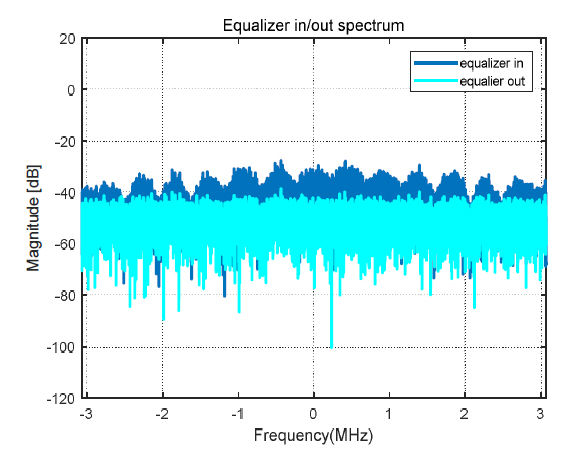
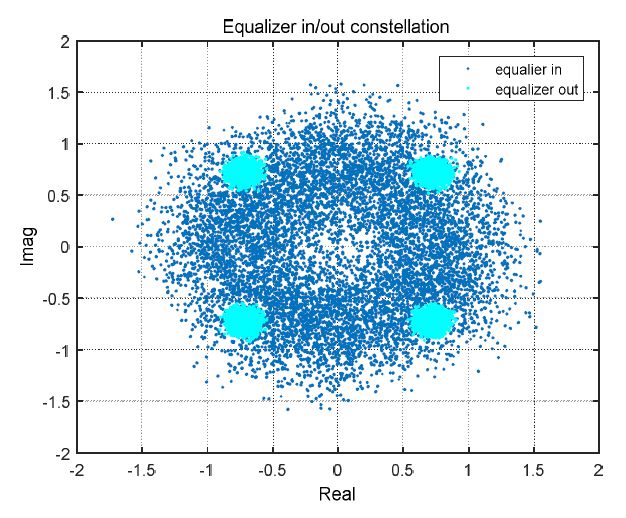
등화기 성능 검증을 위하여 잡음이 없는 환경에서 다중경로 페이딩 영향과 등화기 적용 결과를 성상도 및 스펙트럼을 통해 확인하였다. 시험을 위한 채널 환경은 운용 주파수 2.4㎓ 대역, 이동속도 50㎞/h, 다중경로 채널 환경은 표 3을 기준으로 설정한다.
4. 모의시험 결과
해상 통신 환경에 대한 채널 모델에 대하여 VDE 물리계층의 BER 성능을 확인하고, 동일한 해상 채널에 대한 MX-S2X 물리계층의 성능 분석 및 설계의 타당성을 확인한다.
4.1 모의 시험조건 및 파라미터 설정
해상통신용 다중경로 페이딩 채널은 3.2절 표 3에 제시된 Delay & Power profile을 적용하였고 VDE와 MX-S2X는 운용 주파수가 각각 161.8375㎒와, 2.4㎓로 다름에 따라 적용되는 도플러 주파수는 각각 7.4925㎐와 111.11㎐를 적용하였다. 그리고 Rician K-factor는 LOS(Line-Of-Sight)가 보장되는 경우를 가정하여 14㏈(약 25.1)로 한다.
4.2 VDE 및 MX-S2X 모의시험 결과 분석
4.2.1 VDE 100㎑ 모의시험 결과와 실해역 시험 결과
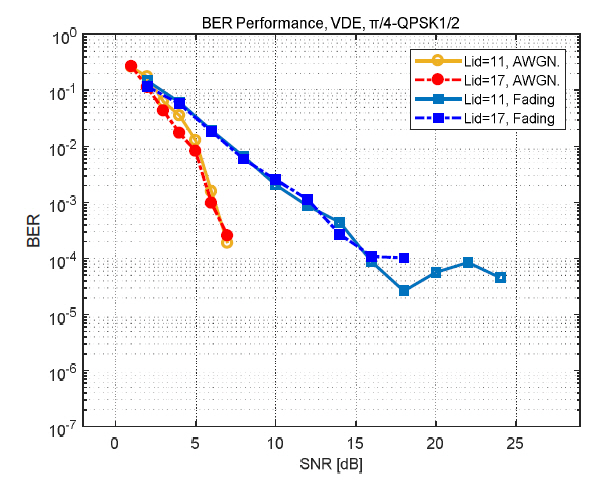
본 절에서는 적용된 다중경로 페이딩 채널 모델에 대한 VDE 100㎑ 대역폭 모드의 모의시험 결과와 실해역 시험 결과를 비교하여 Yang(2010)의 다중경로 페이딩 채널 모델에 대한 타당성을 확인한다. VDE 100㎑ 대역폭 모드에 대한 AWGN 및 Yang(2010) 의 다중경로 페이딩 채널 모델 하에서의 성능은 각각 그림 8 및 그림 9와 같다.
그림 8은 Link ID 11 및 17로 π/4-QPSK 변조 및 Turbo 코드 부호율 1/2을 적용한 결과이고, 그림 9는 Link ID 19로 16QAM 변조 및 Turbo 코드 3/4을 적용한 결과이다. 상기 결과 모두 BER=1×10-4 기준으로 다중경로 페이딩 채널의 성능이 AWGN 성능 대비 약 8㏈ 정도 열화되며, 다중경로 페이딩 채널의 성능이 Error-floor 경향을 보이는 것을 확인할 수 있다. 이와 같은 Error-floor 경향은 표 5와 같은 실해역 시험에서 선박국 수신 SNR이 충분한 환경에서도 측정한 PSR (Packet Success Ratio)의 측정결과 에러가 발생됨을 확인할 수 있다.(Kim et al., 2021) 이러한 시험 결과는 다중경로에 의한 ISI 영향으로 볼 수 있으며, 그 효과는 주파수 영역에서 주파수 선택적 페이딩으로 나타나고 신호의 품질을 열화 시킨다. 신호 품질을 열화 시키는 정도는 Delay & Power profile이 대상 신호에 미치는 영향으로 판단할 수 있는데, 정량적으로 판단하기 쉬운 방법은 채널 모델에 정의한 최대 지연 시간이 심볼 단위 상에 미치는 영향으로 판단할 수 있다.
Yang(2010)의 채널 모델에서 최대 지연은 2.2㎲로 정의되었는데, Link ID 11의 경우 symbol rate는 19.2kbps임에 따라 최대 지연 2.2㎲는 심볼 기준 약 0.0422심볼 지연되고, 같은 심볼이 크기와 위상이 달라진 채로 같은 심볼 시점에 수신되므로 현재 심볼에 잡음으로 작용하는 형태로 SNR을 열화시킬 수 있다. 또한 Link ID 17 및 19의 경우 symbol rate 76.8kbps 는 2.2㎲가 0.169심볼에 해당함으로 ISI는 또한 잡음으로 작용, SNR을 열화시켜 Error-floor를 야기할 수 있으며, 이와 같은 현상이 실해역 시험 중 우연히 관측된 PSR 87.7%의 원인 중 하나로 판단된다.
따라서 적용한 Yang(2010)의 채널모델이 일반적인 실해역 시험 상황 중 있을 수 있는 타당한 상황에 대한 모델로 판단됨으로 본 논문의 MX-S2X 물리계층 성능 분석에도 적용하였다.
4.2.2 MX-S2X 성능 분석
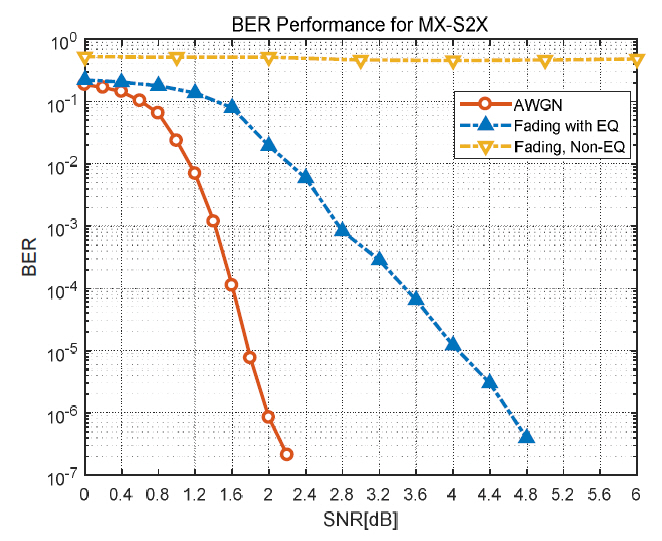
그림 10은 MX-S2X 물리계층의 BER 성능을 분석한 결과이다. AWGN 채널에서는 SNR 1.6dB에서 BER 1×10-4의 성능을 보였으며, Yang(2010) 채널 모델에 대한 SNR상의 영향력을 확인하기 위해 그림 4의 등화기를 거치지 않고 채널보상을 적용하지 않는 경우의 성능을 분석해 본 결과 BER은 약 5×10-1로 정상적인 통신 채널을 제공하지 못하는 것으로 확인되었다. MX-S2X 물리계층의 성능을 확인하기 위해 등화기에서 채널보상을 한 경우의 성능을 분석해 본 결과 SNR 3.5dB에서 BER 1×10-4의 성능을 보임으로, AWGN 대비 약 2dB 열화 범위 내에서 동작하는 것으로 확인되었다.
채널보상 기능을 미적용할 경우 MX-S2X의 symbol rate는 6.144㎒이므로 Yang(2010) 채널 모델의 최대 지연 2.2㎲는 MX-S2X 심볼 약 13.52 심볼에 해당한다. 이런 Delay Profile의 영향은 VDE 심볼 내에 다른 크기와 다른 위상으로 수신되는 간섭으로 작용하여 ISI 영향으로 인한 수신 신호 품질의 열화를 발생시킨다. MX-S2X에서의 최대 지연의 영향은 다른 크기와 다른 위상뿐만 아니라 다른 심볼 간 신호가 합산됨으로 인해 더욱 성능 열화에 큰 영향을 받는다.
등화기를 적용한 경우 Error-floor가 나타나지 않았으며, 특히 SNR 2dB 열화 범위 내에서 동작하는 것으로 분석된 것은 등화기의 신호 추정 방법 및 보상 방법이 적합하고, 슬롯 구조상 충분한 Training sequence가 할당되었으며, 채널 추정의 정확도를 높이기 위한 Pilot의 배치와 Coherence time 내 Slot이 전송되도록 설계한 것 모두 적합하다고 볼 수 있다. 다시 말해, SNR이 높음에도 불구하고 발생했던 Error-floor는 물리계층의 적합한 설계로 개선된 것으로 판단된다.
5. 결 론
해상 선박 및 모빌리티의 자율 운항, 무인화 등에 따라 현재까지 사용하던 레거시 통신을 뛰어 넘는 초고속 통신 요구가 다양한 연구를 통해 제시되고 있으며 특히 선박과 선박 간 선박을 중심으로 하는 직접통신 방안 제시가 중요하게 요구되고 있는 상황이다.
기존 해상 모바일 서비스에 할당된 300㎒ 이하의 대역보다 높은 주파수에서의 광대역 통신 기술을 활용하는 MX-S2X 통신을 개발하기 위해 고 주파수 대역을 해상에서 사용할 경우 예상되는 해수면에 의한 다중경로 페이딩 영향을 최소화하기 위한 MX-S2X 통신의 물리계층 설계 방안과 이에 대한 성능분석을 수행하였다.
해상 운용환경에 존재하는 다중경로 페이딩의 영향을 확인하기 위하여 VDE 실해역 시험 결과 및 관련 논문을 통해 모의시험을 수행하여 타당성을 확인하였고, 이를 활용하여 본 논문에서 제시하는 MX-S2X 물리계층 설계 및 다중경로 페이딩 영향을 극복할 수 있도록 설계하였다. 해상 환경에 대한 채널 모델을 활용하여 MX-S2X 물리계층에 대한 모의시험을 수행한 결과, VDE 물리계층의 경우 BER Error-floor 현상이 나타났던 것과 달리 MX-S2X 물리계층의 모의시험 결과는 AWGN 대비 SNR 2㏈ 열화 범위 내에서 수신됨을 확인할 수 있었다. 본 논문을 통해 설계된 물리계층은 선박 간 통신에서 SNR이 높음에도 불구하고 다중경로 페이딩 환경에서 겪는 통신 품질 저하를 현저히 개선할 수 있다.
MX-S2X 통신을 VDE 또는 비면허대역과 같은 고 주파수 대역을 활용하여 선박과 같은 해양 모빌리티가 주변의 객체(선박, 해양모빌리티, 인프라, 익수자 등)와 직접 통신할 수 있게 된다면 향후 도래할 자율운항선박, 해양 모빌리티, 무인선 환경의 기본 통신 인프라를 확보할 수 있을 것이다.



 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






