자율운항선박의 선회특성이 충돌회피에 미치는 영향
Effect of Turning Characteristics of Maritime Autonomous Surface Ships on Collision Avoidance
Article information
Abstract
자율운항선박(Maritime Autonomous Surface Ships, MASS)의 선회특성이 충돌회피에 미치는 영향을 식별하는 것은 MASS의 충돌회피에 핵심적인 단서를 제공할 수 있다. 본 연구의 목적은 다양한 타각과 선속에 의해서 변할 수 있는 선회특성이 충돌회피에 미치는 영향을 식별하기 위한 것이다. 선회특성이 충돌회피에 미치는 영향은 전장 161 미터 선박의 수학 모델을 이용하여 선회권을 관측한 후, 네 가지 충돌조우상황에 대한 충돌회피 수치 시뮬레이션의 결과를 이용하여 분석하였다. 두 선박 사이의 최소상대거리와 최소시간을 평가 변수로 이용하여 평가한 결과, 타각은 최소상대거리의 변화에 주요한 영향을 미치고, 선박의 속력은 최소시간의 변화에 주요한 영향을 미치는 것으로 나타났다. 본 연구에서 제안한 평가 방법은 MASS의 원격제어에서 충돌회피를 하나의 방법으로 적용 가능할 것으로 기대된다.
Trans Abstract
Identifying the effect of turning characteristics on collision avoidance for Maritime Autonomous Surface Ships (MASS) can provide a key to avoid the collision of MASS. The purpose of this study was to derive a method to identify the effect of turning characteristics, which can be changed by various rudder angles and the ship’s speed, on collision avoidance. The turning circle was observed using a mathematical model of a 161-meter-long ship, and it was analyzed that the turning circle had an effect on collision avoidance through numerical simulations of collision avoidance for four collision situations of two ships. The evaluation results using the two variables, the minimum relative distance between two ships and the minimum time at the minimum relative distance, demonstrated that the rudder angle has a major influence on the change of the minimum relative distance, and the ship’s speed has a major influence on the change of the minimum time. The evaluation method proposed in this study was expected to be applicable to collision avoidance as a measures in remote control of MASS.
1. 서 론
자율운항선박(Maritime Autonomous Surface Ships, MASS)(IMO, 2019)의 선회특성이 충돌회피에 미치는 영향을 식별하는 것은 MASS의 원격제어에서 충돌을 회피하기 위한 하나의 단서로서 중요하다.
선박의 충돌회피가 국제해사기구(International Maritime Organization, IMO)의 COLREGs 1972(1972, Convention on the International Regulations for Preventing Collisions at Sea)(IMO, 2009)에 의거하여 수행되는 경우, 선회특성은 타선과의 충돌회피 성공 또는 실패를 결정할 수 있는 주요한 척도로 작용될 수 있다. 이러한 선회특성은 주어진 타각과 선속의 조합에 의해서 주로 결정되는 것으로 알려져 있다(Åström, et al., 1976; Van Berlekom et al., 1972). 아울러 선회특성은 선회권(turning circle)을 이용하여 분석할 수 있는데, 선회권은 선박의 선회에 의해서 형성되는 선박 중심의 궤적을 의미하는 것으로, IMO의 표준선박조종성능평가(IMO, 2002)의 한 가지 수단으로 적용되고 있다. 아울러 선회권의 선회시작 위치와 선회시작 시간은 충돌회피에 요구되는 안전거리의 결정에 영향을 미치는 것으로 알려져 있다(Szlapczynski et al., 2017; Szlapczynski, et al., 2018).
이와 같이, 선회특성은 선회에 의한 충돌회피에 영향을 미치는 것으로 알려져 있으나, 선회특성이 충돌회피에 미치는 영향의 식별에 관한 연구는 드문 실정이다. 본 연구에서는 다양한 타각과 선속의 조합으로 관측된 선회권을 이용하여 선회특성이 충돌회피에 미치는 영향을 식별하였다. 이러한 식별의 최종 목적은, 원격으로 제어되는 MASS의 충돌회피를 위한 것이다.
MASS는 수준(level) 1부터 수준 4까지 네 수준으로 구분되어 있다. 수준 1은 현존 선박의 자동화 수준이고, 수준 2는 현존 선박의 자동화 수준과 자동제어가 혼합된 수준이며, 수준 3은 자동화와 자율화가 혼합된 수준이고, 수준 4는 완전 자율화된 수준이다(ClassNK, 2020; DNV-GL, 2018; Rolls-Royce plc, 2016; VTMIS, 2020). 국내외적인 개발목표는 기존 유인 선박(사람이 제어하는 선박)에 원격제어 장치를 부가하여 원격에서 제어 가능한 수준 2와 수준 3 사이에 있다(노 등, 2021; 임, 2021). 수준 2와 3 사이에서 요구되는 주요 기술 중 하나는 원격으로 MASS를 안전하게 조종하는 것인데, 이를 위해 MASS와 다른 선박 사이의 충돌은 반드시 회피 되어야 한다. 아울러 MASS의 충돌이 예방되기 위해서는 다음 네 문제에 대한 해결이 필요한데, 1) 선회특성에 의한 충돌발생 환경과 조건의 식별, 2) 충돌이 발생하거나 발생하지 않을 환경과 조건(이것은 인공지능에 적용되기 위한 것), 3) 충돌의 예측 방법, 4) 충돌의 회피 방법.
본 연구는 위의 1)항에 관한 것으로, 전장 161 미터의 화물선에 대한 4 자유도 수학 모델을 이용하여 4종 선속과 6종 속력의 조합에 대한 선회특성이 충돌에 미치는 영향을 평가하였다. 아울러 조우상황에 따른 영향은 4종의 조우상황 시나리오를 이용하여 비교하였다. 본 연구에서 제안된 방법은 MASS의 원격제어에서 충돌회피를 위한 하나의 수단으로 제공될 수 있을 것으로 기대된다.
2. 연구 접근 방법
2.1 선회특성이 충돌회피에 미치는 영향의 평가 개념
선회특성이 충돌회피에 미치는 영향의 평가 개념은, 본선(OS)과 타선(TS) 사이(OS-TS)의 90도 교차상황을 이용하여 정립하였다. Fig. 1은 x-y 평면 좌표에 설명된 평가 개념을 나타낸 것으로, 그림에 나타낸 기호는 다음 같이 정의된 것이다.

Concepts for the evaluation of turning characteristics affecting on the collision avoidance
• ϕOS, ϕTS : 본선의 초기 선수방위(0도)와 타선의 초기 선수방위(270도)
• TC*, 본선의 선회권(검은 색의 원)
• TC, 본선이 충돌회피를 위해 선회한 궤적(적색의 호)
• O1(t=0), O2(t=1), O3(t=2): 임의로 준 시각 t=0, t=1, t=2 각각에 대한 OS의 위치
• T1(t=0), T2(t=1), T3(t=2): 임의로 준 시각 t=0, t=1, t=2 각각에 대한 TS의 위치
• C, 두 선박의 충돌 예상 지점
• O, 선회권의 가상 중심점(0,0)
• R, 선회권의 반경(m)
• RD, OS-TS 상대거리(m)
• RDmin, 선회 후 최소가 된 OS-TS 최소상대거리(m)
• Ψ, OS의 선수를 기준으로 측정한 OS-TS 상대방위 (0 ≤ Ψ < 360)
Fig. 1에 나타낸 충돌회피 상황은 다음과 같다. OS는 O1-O2 경로를 이동한 후 O2에서 선회하여 O3 지점에 도착한다. TS는 T1-T2 경로를 이동하여 T3에 도착한다. 그 결과, OS는 O3-T3 구간에 해당하는 최소상대거리 RDmin, 만큼 TS와 분리되어 충돌을 회피할 수 있다. 만약 OS가 O2에서 선회하지 못하고 C 지점에 점차 근접하면 충돌의 가능성은 증대된다.
위에 설명된 선회에 의한 충돌회피가 고려되는 경우, 먼저 선회조종의 시작위치 O2의 결정이 필요하다. 이에 관해서는 선박 도메인(Ship domain) 개념이 도입된 다수의 관련 연구가 보고되어 있으나, 선회조종 시작위치에 관한 확정적 결정방법은 아직 학계에 보고된바 없다(Fujii, 1971; Szlapczynski et al., 2017; Szlapczynski, et. al., 2018). 그 이유는, COLREGs에는 최적의 선회조종 시작위치와 시간에 관해서 명시되어 있지 않고, 선박은 COLREGs에 의해서 규정할 수 없는 다양한 환경이 발생하기 때문이다(Cockcroft, 2003). 한편, Coldwell(1983)과 Szlapczynski 등(2017, 2018)에 의하면 최적의 선회조종 시작위치는, ‘OS의 본선 도메인이 침해되지 않는 3.25LOA의 안전거리가 확보될 수 있는 위치’로 제안된 바 있다. 여기서, 3.25LOA는 본선 전장(Length of Overall, LOA)의 3.25배에 해당하는 거리를 의미한다.
한편, 현재까지 보고된 연구결과를 참고하는 경우, MASS의 원격제어에서 충돌회피의 최적 위치는 OS-TS 상대거리와 OS 이동시간에 의해서 결정될 수 있는 것으로 알려져 있는데(Park et. al., 2016; Yim, 2012; Yim et al., 2013; Yim et al., 2018), 그 이유는 다음과 같다.
• 첫째는 최근접여유거리(Closest Point of Approach, CPA)• 와 최근접여유시간(Time to CPA, TCPA)의 개념(Bowditch, 2019)이 고려된 것으로, 이 개념은 제일 가까운 근접 위치에서 상대거리와 시간의 평가에 의해서 충돌회피 여부를 결정하기 위한 것이다.
• 둘째는 원격제어의 특징이 고려된 것으로, 원격제어는 원격지에서 MASS를 제어하기 때문에 다양한 지연(latency)이 발생할 수 있고, 다양한 지연에 의해서 상대거리와 시간은 변동될 수 있다. 그래서 MASS의 원격제어에서 충돌회피를 위한 최적 위치의 결정에는 지연에 의한 상대거리와 시간의 변화가 고려되어야 한다.
• 셋째는 선회특성이 고려된 것인데, 충돌회피를 위한 최적 위치는 선회특성에 따라 변할 수 있다. 선회권의 반경이 크면 선회 궤적은 커지고, 이와 반대인 경우는 작아진다. 선회에 의한 충돌은 이 선회권 상에서 발생하기 때문에 선회특성은 충돌에 영향을 미친다.
위의 내용을 종합하면, 최적의 선회조종 시작위치는 두 변수(OS-TS 상대거리와 OS의 이동시간)에 의해서 결정될 수 있고, 이들 두 변수의 변화는 선회특성에 의존한다. 아울러, 선회특성은 타의 각도(타각)와 선속에 의존하여 결정될 수 있다. 따라서 선회특성이 충돌회피에 미치는 영향은, 최소상대거리와 이때의 시간에 의해서 분석될 수 있고, 이 때 적용된 타각과 선속에 의해서 평가될 수 있다.
아울러 본 연구에서, 최소상대거리와 최소시간은 CPA/TCPA와는 서로 다른 의미로 사용하였는데, CPA/TCPA는 두 선박이 코스와 속력을 유지하면서 서로 통항하는 경우 가장 짧은 거리와 이때의 시간을 의미하는 것임(Olindersson and Janson, 2015)에 반하여, 최소상대거리와 최소시간은 선회에 의해서 발생되는 최소거리와 시간을 의미한다.
2.2 실험 방법
(1) 수학 모델
선회특성의 관측에는 전장 161m 화물선의 4자유도 수학모델을 이용하였다(Chislett et al., 1965). 이 수학모델은 두 입력 변수(명령 타각과 명령 속도)와 4자유도 운동에 관한 출력(surge velocity, sway velocity, roll velocity, yaw velocity, roll angle, surge position, sway position)을 갖는다. 이 수학모델 데이터에 관한 상세한 내용은 Chislett 등(1965)의 문헌에 설명되어 있다. Table 1은 모델 선박의 제원을 나타낸다.
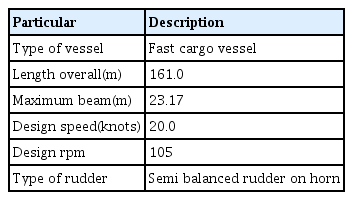
Particulars of model ship
(2) 선회권 데이터 획득
선회권 데이터는 수학모델에서 관측된 선회 궤적으로부터 획득하였는데, 선회 궤적은 다음과 같은 6종 타각과 4종 선속의 조합에 대한 총 24종의 서로 다른 형태로 획득하였다.
• 6종의 타각: 5도, 10도, 15도, 20도, 25도, 30도
• 4종의 선속: 5knots, 10knots, 15knots, 20knots
(3) 충돌회피 실험 방법
충돌회피 실험을 위해서는 선회시작 위치의 결정이 필요하다. 본 연구에서는 두 선박 사이의 상대거리가 6.4LOA인 지점을 선회시작 위치로 정하였다. 6.4LOA는 항로가 제한된 좁은 수로에서 두 선박 사이의 안전거리로 알려져 있다.
한편, Coldwell(1983)은, ‘타선에 의해서 본선 도메인이 침해되지 않는 3.25LOA’를 충돌회피에 요구되는 안전거리로 보고한 바 있으나, 이러한 안전거리는 더 향상된 기술의 개발이 필요함으로, 본 연구에서는 추후 연구과제로 둔다.
아울러, 충돌회피 실험은 다음 4종의 충돌조우 시나리오를 이용하여 조우상황에 따른 선회특성의 영향을 비교 평가하였다.
• 시나리오 1(S1): 0도 선수만남(head-on) 상황(Ψ=0)
• 시나리오 2(S2): 45도 교차(crossing) 상황(Ψ=45)
• 시나리오 3(S3): 90도 교차상황(Ψ=90)
• 시나리오 4(S4): 135도 교차상황(Ψ=135)
Fig. 2는 설계된 시나리오를 나타낸 것으로, COLREGs에 의거하여 타선은 S1을 제외하고 유지선박이 되며, S1은 회피동작을 하지 않는 선박으로 가정하였다.

Scenarios to test the effect of turning characteristics affecting on the collision avoidance.
2.3 평가 방법
선회특성이 충돌회피에 미치는 영향의 평가는 OS-TS 상대거리와 OS의 이동시간을 이용하여 수행하였다. 먼저, OS-TS 상대거리 RD는 다음과 같이 나타낼 수 있고,
여기서 xOS, yOS, xTS, yTS은 OS의 x-축과 y-축 값 그리고 TS의 x-축과 y-축 값 각각을 다음 같이 나타낸 것으로, 이들 좌표 값은 시간 t-1에서의 위치가 시간 t에서의 위치와 누적된 것으로, 이들은 다음 같이 쓸 수 있다.
여기서 △xOS, △yOS, △xTS, △yTS은 샘플시간 ts동안 변화된 OS와 TS의 좌표 값을 나타낸 것으로, 이들은 다음 같이 표현될 수 있다.
여기서 ϕOS와 ϕTS는 OS와 TS의 선수방위를 각각 나타내고, νOS와 νTS는 OS와 TS의 선속을 각각 나타내며, ts은 0.5초로 정하였다. OS-TS의 상대거리 RD에 대한 최소상대거리 RDmin 와 RDmin 의 평균 값
여기서 nvariable은 평균할 대상 변수의 수를 나타낸다. 아울러, OS의 이동시간 T은 다음 같이 나타낼 수 있다.
여기서 n은 샘플 수를 나타낸다. 그리고 OS 이동시간의 최소시간 Tmin은 RDmin 이 주어질S 때의 시간으로 관측될 수 있는데, Tmin과 Tmin의 평균시간
3. 실험 및 결과
3.1 선회 시뮬레이션 결과
Fig. 3은 수치 시뮬레이션에서 일정한 시간동안 관측된 선회권을 나타낸 것으로, 이것은 6종 타각 각각에 대해서 관측된 것이다. 선회권은 선회시작 위치(검은 색 원)를 중심으로 일정한 반경을 갖는 것으로 보인다.

Observed turning circles by numerical simulation.
3.2 선회특성이 충돌회피에 미치는 영향의 평가 결과
선회특성이 충돌회피에 미치는 영향은, 4종 시나리오별 6종 타각과 4종 선속의 조합에 대한 수치 시뮬레이션 결과를 이용하여 분석하였다. 아울러 평가결과는 두 방법으로 분석하였는데, 하나는 두 선박 사이의 상대적인 위치관계를 가시화하여 분석한 것이고, 다른 하나는 시간에 따른 두 선박 사이의 상대 거리를 가시화하여 분석한 것이다.
시나리오 1
Fig. 4는 시나리오 1(Ψ = 0)에서 6종 타각에 대한 충돌회피 가시화 결과 중 하나의 샘플을 나타낸 것으로, 선속은 본선과 타선 모두 5 노트로 고정한 것이다. 검은 색 작은 원과 긴 실선은 OS의 초기위치와 경로를 나타내고, 청색 작은 원과 실선은 TS의 초기위치와 경로를 나타낸다. 에스테리크 마크(*)는 6.4LOA의 OS-TS 상대거리(RD)가 되는 지점을 나타낸 것으로, OS는 이 지점에서 선회를 시작한다. 아울러, 6종 색으로 나타낸 원호는 6종 타각에 대한 선회궤적을 나타낸다. 타각이 작을수록 선회권은 TS에 근접됨을 볼 수 있다.

Calculation results for Scenario 1: (a) 5 knots, (b) 10 knots, (c) 15 knots, (d) 20 knots.
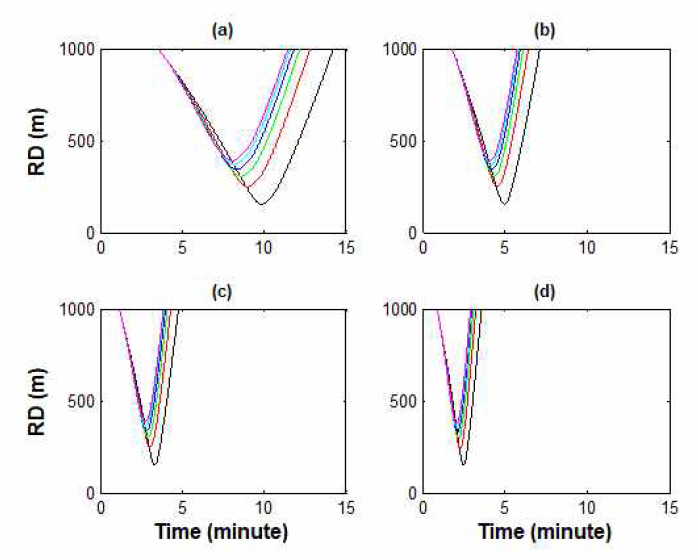
Fig. 5는 4종 선속 각각에 대해서 계산한 RD를 나타낸 것으로, (a), (b), (c), (d)의 네 박스 그림은 5노트, 10노트, 15노트의 20노트를 각각 나타낸다.
Calculation results for Scenario 1: (a) 5 knots, (b) 10 knots, (c) 15 knots, (d) 20 knots.
여기서 우리의 관심은 RD가 최소가 될 때의 최소상대거리와 최소시간이다. 최소상대거리는 4종 시나리오 모두에서 유사한 것으로 보이는데, 최소시간은 각 시나리오 마다 현저한 차이를 보인다. 최소상대거리와 최소시간에 대한 통계 값들은 3.2절의 최소상대거리 분석과 3.3절의 최소시간 분석에서 설명한다.
시나리오 2
Fig. 6은 시나리오 2(Ψ = 45)에서 6종 타각에 대한 충돌회피 가시화 결과 중 일부 샘플을 나타낸 것으로, 선속은 본선과 타선 모두 5노트로 고정한 것이다. 여기서, Fig. 6은 물론 Fig. 8과 Fig. 10에서, 본선의 선회 궤적과 타선의 궤적이 겹치는 지점이 보이는데, 이것은 충돌이 발생한 지점이 아니라 시간 경과에 따라 나타나는 본선과 타선의 위치일 뿐이다. 충돌 여부는 시간에 따른 상대거리를 나타낸 Fig. 7, Fig. 9, Fig. 11에서 확인할 수 있다.

Calculation results for Scenario 2: (a) 5 knots, (b) 10 knots, (c) 15 knots, (d) 20 knots.
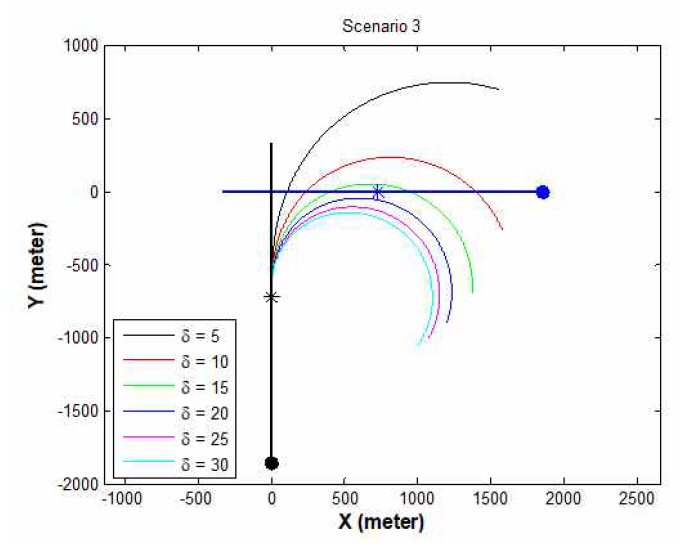
Visualization results for scenario 3(speed, 5 knots).

Visualization results for Scenario 4(speed, 5 knots.
Calculation results for Scenario 2: (a) 5 knots, (b) 10 knots, (c) 15 knots, (d) 20 knots.

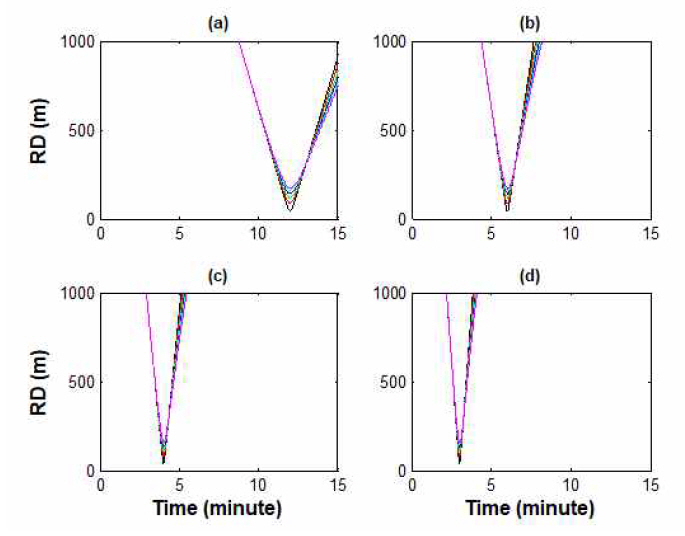
Calculation results for Scenario 3: (a) 5 knots, (b) 10 knots, (c) 15knots, (d) 20 knots.
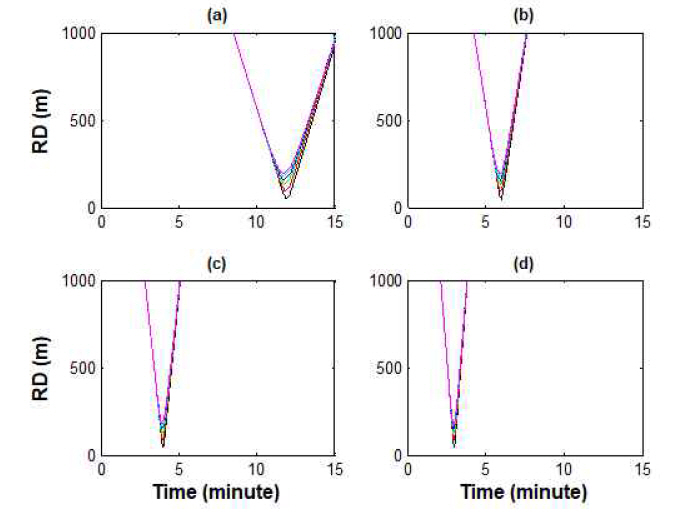
Calculation results for Scenario 4: (a) 5 knots, (b) 10 knots, (c) 15 knots, (d) 20 knots.
시나리오 3
Fig. 8은 시나리오 3(Ψ = 90)에서 6종 타각에 대한 충돌회피 가시화 결과 중 일부 샘플을 나타낸 것으로, 선속은 본선과 타선 모두 5노트로 고정한 것이다. 아울러 Fig. 9는 4종 선속 각각에 대한 RD를 나타낸다. 두 그림의 의미는 앞의 두 그림(Fig. 5와 6)과 동일하다. 분석 결과, 시나리오 3에서도 앞의 시나리오 2와 유사한 결과를 보였으나 최소시간의 경우는 시나리오 2와 다소 다른 결과를 보였다.
시나리오 4
Fig. 10은 시나리오 4(Ψ = 135)에서 6종 타각에 대한 충돌회피 가시화 결과 중 일부 샘플을 나타낸 것으로, 선속은 본선과 타선 모두 5노트로 고정한 것이다. 아울러 Fig. 11은 4종 선속 각각에 대한 RD를 나타낸다. 두 그림의 의미는 앞의 두 그림(Fig. 5와 6)과 동일하다. 분석 결과, 시나리오 4에서도 앞의 시나리오 3과 유사한 결과를 보였으나 최소시간의 경우는 시나리오 3과 다소 다른 결과를 보였다.
3.3 최소상대거리 분석
Fig. 12는 6종 타각과 4종 선속의 조합에 대한 최소상대거리의 변화를 나타낸 것으로, (a), (b), (c), (d)의 네 박스 그림은 시나리오 1부터 시나리오 4까지를 각각 나타낸다. 4종 시나리오 모두에서, 6종 타각에 의한 변화는 큰 것으로 보이는 반면, 4종 선속에 의한 변화는 작은 것으로 보인다.

Minimum RD according to the change of rudder angle: (a) Scenario 1, (b) Scenario 2, (c) Scenario 3, (d) Scenario 4.
Table 2는 4종 시나리오와 4종 선속의 조합에 대한 최소상대거리의 평균(표준편차)을 나타낸다. Fig. 12와 마찬가지로 4종 시나리오 모두에서 4종 선속에 의한 변화는 작게 나타났으나, 4종 선속에 대한 4종 시나리오 사이의 변화는 크게 나타났다. 최소상대거리의 평균값은 시나리오 1의 선속 ν4 (20 knots)에서 가장 작은 110.64 m로 나타났고, 시나리오 4의 선속 ν1 (5 knots)에서 가장 큰 302.06 m로 나타났다. 전반적으로, 최소상대거리는 시나리오 1에서 작게 보이고, 시나리오 4에서 크게 보인다.

Mean(standard deviation) of minimum RD(meter) according to the 4 scenarios and 4 speeds
위의 결과로부터, 최소상대거리는 조우상황과 타각 변화에 주로 의존하고, 선속 변화에 따른 영향은 작은 것으로 확인되었다.
3.4 최소시간 분석
Fig. 13은 6종 타각과 4종 선속의 조합에 대한 최소시간의 변화를 나타낸 것으로, (a), (b), (c), (d)의 네 박스 그림은 시나리오 1부터 시나리오 4까지를 각각 나타낸다. 4종 시나리오 모두에서, 6종 타각에 의한 변화는 작은 것으로 보이는 반면, 4종 선속에 의한 변화는 큰 것으로 보인다. 이 결과는 앞에서 설명한 최소상대거리와 서로 다른 결과이다.
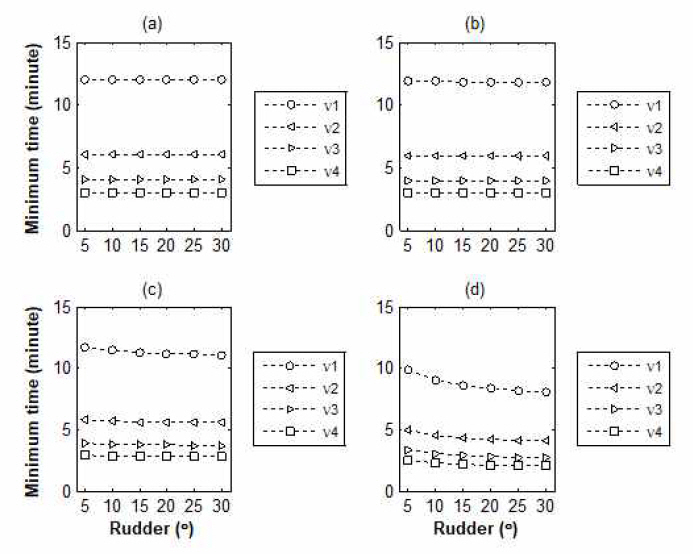
Minimum time according to the rudder angle: (a) Scenario 1, (b) Scenario 2, (c) Scenario 3, (d) Scenario 4.
Table 3은 4종 시나리오와 4종 선속의 조합에 대한 최소시간의 평균(표준편차)을 나타낸다. Fig. 13과 마찬가지로 4종 시나리오 모두에서 4종 선속에 의한 변화는 크게 나타났으나, 4종 선속에 대한 4종 시나리오 사이의 변화는 작게 나타났다. 최소시간의 평균값은 시나리오 1의 선속 ν1 (5 knots)에서 가장 큰 12.03분으로 나타난 반면, 시나리오 4의 선속 ν4 (20 knots)에서 가장 작은 2.21분으로 나타났다. 전반적으로, 최소시간은 시나리오 1에서 크게 보이고, 시나리오 4에서 작게 보인다.

Mean(standard deviation) of minimum time(minute) according to the 4 scenarios and 4 speeds
위의 결과로부터, 최소시간은 조우상황과 선속 변화에 주로 의존하고, 타각 변화에 따른 영향은 작은 것으로 확인되었다.
3.5 최소상대거리와 최소시간의 비교
4종 시나리오에 대한 4종 선속과 6종 타각의 조합에 대해서 계산한 최소상대거리와 최소시간의 분석 결과를 요약하면 다음과 같다.
• 최소상대거리는 주로 타각에 의존하여 변하고, 선속에 의한 변화는 작다. 이와 달리, 최소시간은 주로 선속에 의존하여 변하고, 타각에 의한 변화는 작다.
• 시나리오 번호가 증가함에 따라(즉, OS-TS 상대방위(Ψ)가 증가함에 따라), 최소상대거리의 평균값은 증가하는 반면, 최소시간의 평균값은 감소한다.
여기서, 최소상대거리와 최소시간은 타각과 선속의 조합으로 관측된 선회특성을 이용하여 평가한 것임을 고려할 때, 선회특성은 충돌회피에 영향을 미치는 것으로 귀결되었다.
4. 결 론
본 연구에서는 자율운항선박에서 선회특성이 충돌회피에 미치는 영향을 평가하기 위한 방법을 제안하였다. 이 평가방법은 두 선박 사이의 최소상대거리와 이때의 최소시간을 평가지표로 이용한 것이다. 제안한 방법은, 4종 시나리오 각각에 대해서 6종 타각과 4종 선속의 조합으로 관측된 선회권을 이용한 수치 시뮬레이션을 이용하여 검증하였다. 평가 결과는 다음과 같다.
• 최소상대거리는 주로 타각에 의존하여 변하고, 선속에 의한 변화는 작다.
• 이와 달리, 최소시간은 주로 선속에 의존하여 변하고, 타각에 의한 변화는 작다.
• 두 선박 사이의 상대방위가 증가함에 따라, 최소상대거리의 평균값은 증가하는 반면, 최소시간의 평균값은 감소한다.
본 연구에서 제안된 평가 방법은, 자율운항선박의 원격제어에서 선회권을 이용한 충돌회피 알고리듬 개발에 적용 가능할 것으로 기대된다. 향후, 자율운항선박의 원격제어 시스템에서 제어지연이 충돌회피에 미치는 영향의 식별에 본 연구에서 제안한 방법을 적용할 예정이다.
Acknowledgements
본 논문은 2021년도 해양수산부 및 해양수산과학기술진흥원 연구비 지원으로 수행된 '자율운항선박 기술개발사업(20200615)'의 연구결과입니다.