


1. ņä£ ļĪĀ
ļīĆņ¢æņŚÉņä£ ļ░£ņāØĒĢśļŖö ļīĆĒśĢ LNGņäĀļ░ĢņØś ņÜ┤ļÅÖņØĆ ņäĀļ░ĢņØś ņĢłņĀäņŚÉ ņżæņÜöĒĢ£ ņśüĒ¢źņØä ļ»Ėņ╣£ļŗż. ĻĘĖ ņØ┤ņ£ĀļŖö, ņäĀļ░ĢņØś ņÜ┤ļÅÖņØĆ ņ×Éņ£ĀĒæ£ļ®┤ĒÜ© Ļ│╝ļź╝ ļ░£ņāØņŗ£ņ╝£ ņäĀņ▓┤ņØś ļ│ĄņøÉņä▒ņØä ņĀĆĻ░Éņŗ£ĒéżĻ│Ā, ņŖ╣ļ¼┤ņøÉņØś Ēö╝ļĪ£Ļ░É ņØä ĻĘ╣ļīĆĒÖöĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż. ņØ┤ļŖö Ēīīļ×æņŚÉ ņØśĒĢ£ ņäĀņ▓┤ņÜ┤ļÅÖņØś ņČöņĀĢ ņØä ĒåĄĒĢśņŚ¼ Ēö╝ĒĢ┤ļź╝ ņĀĆĻ░Éņŗ£Ēé¼ ņłś ņ׳ļŗż(Lee et al. 2015). ĒŖ╣Ē׳ ņ¢┤ ļ¢ĀĒĢ£ Ēīīļ×æņØś ņāüĒÖ®ņŚÉņä£ļÅä ņäĀņ▓┤ņØś ņÜ┤ļÅÖņØä ņČöņĀĢĒĢĀ ņłś ņ׳ļŖö Ļ▓āņØĆ ĒĢŁĒĢ┤ņé¼ņŚÉĻ▓ī ņżæņÜöĒĢ£ ĒĢŁĒĢ┤ņĀĢļ│┤ļź╝ ņĀ£Ļ│ĄĒĢĀ ņłś ņ׳ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņØś ļ¬®ņĀüņØĆ Ēīīļ×æņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢ£ ņäĀņ▓┤ņØś ņÜ┤ļÅÖņØä ņŗ£ņŖż Ēģ£ ņØ┤ļĪĀņØä ņØ┤ņÜ®ĒĢ┤ ņČöņĀĢĒĢśĻĖ░ ņ£äĒĢ£ Ļ▓āņØ┤ļŗż. ņØ┤ļ¤¼ĒĢ£ ņŚ░ĻĄ¼ ļ¬®ņĀü ļŗ¼ ņä▒ņØä ņ£äĒĢ┤ņä£ļŖö, Ēīīļ×æņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢ£ ņäĀņ▓┤ņØś ņÜ┤ļÅÖ ļŹ░ņØ┤Ēä░ ĒÜŹļōØ ņØ┤ ĒĢäņÜöĒĢśĻ│Ā, ļŹ░ņØ┤Ēä░ ĒÜŹļōØ Ļ▓░Ļ│╝ļź╝ ņØ┤ņÜ®ĒĢ£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖ ņØś ĻĄ¼ĒśäņØ┤ ĒĢäņÜöĒĢśļŗż.
ņäĀņ▓┤ņØś ņÜ┤ļÅÖ ļŹ░ņØ┤Ēä░ļŖö ANSYS CFX 17.2ļź╝ ņØ┤ņÜ®ĒĢ£ ņĀäņé░ņ£Ā ņ▓┤ņŚŁĒĢÖ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ĒåĄĒĢ┤ ĒÜŹļōØĒĢśņśĆĻ│Ā, ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖ ņØĆ ņĀäņ×ÉĻ│ĄĒĢÖņŚÉņä£ ņ”Øļ¬ģļÉ£ ņŗ£ņŖżĒģ£ ņŗØļ│ä(System Identification) ļ¬©ļŹĖņØä ņØ┤ņÜ®ĒĢśņśĆļŗż(Viberg, M, 1995; Kim, B. H. & Park, T. 2007). ĒŖ╣Ē׳ ņŗ£ņŖżĒģ£ņØĆ ņäĀĒśĢ-ņŗ£ļČłļ│Ć(Linear-Time Invariant) ņä▒ ņØä Ļ░Ćņ¦äļŗżĻ│Ā ņĀĢņØśĒĢśņśĆļŗż. ņĢäņÜĖļ¤¼ ņŗ£ņŖżĒģ£ ņŗØļ│ä ļ¬©ļŹĖņØä ņØ┤ņÜ®ĒĢ£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØä ĻĄ¼ņČĢĒĢ£ Ēøä ņČöņĀĢņśżņ░© ņĄ£ņåīĒÖö ĻĖ░ļ▓ĢņØä ņØ┤ ņÜ®ĒĢ┤ ĒīīļØ╝ļ»ĖĒä░ļź╝ ņČöņĀĢĒĢśņśĆļŗż. ņČöņĀĢĒĢ£ ĒīīļØ╝ļ»ĖĒä░ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņČö ņĀĢ ļ¬©ļŹĖņØä ĻĄ¼ņČĢĒĢśĻ│Ā, ĻĄ¼ņČĢļÉ£ ņČöņĀĢ ļ¬©ļŹĖņØä ĒåĄĒĢ┤ ļ│Ė ņŚ░ĻĄ¼ņØś ļ¬®ņĀü ņØĖ ņäĀņ▓┤ ņÜ┤ļÅÖņØä ņČöņĀĢĒĢśņśĆļŗż.
ĒĢ£ĒÄĖ, ņäĀņ▓┤ļŖö 6ņ×Éņ£ĀļÅäņÜ┤ļÅÖņØä ĒĢśļŖö ĒŖ╣ņ¦ĢņØ┤ ņ׳ļŗż. ĒĢśņ¦Ćļ¦ī ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö 6ņ×Éņ£ĀļÅä ņÜ┤ļÅÖ ņżæ ļ╣äņäĀĒśĢņä▒ņØ┤ Ļ░ĢĒĢ£ ļĪż ņÜ┤ļÅÖļ¦īņØä ņäĀ ņĀĢĒĢśņŚ¼ LTI ņŗ£ņŖżĒģ£ņØś ĒŖ╣ņä▒ņØä ņØ┤ņÜ®ĒĢ£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢņØś ņŗżĒśä Ļ░ĆļŖźņä▒ņØä Ļ▓ĆĒåĀĒĢśņśĆļŗż.
2. ņŚ░ĻĄ¼ ļ░®ļ▓Ģ
2.1 ņŚ░ĻĄ¼ņĀłņ░©
ņŚ░ĻĄ¼ļŖö ļŗżņØīĻ│╝ Ļ░ÖņØĆ 4ļŗ©Ļ│ä ņĀłņ░©ļź╝ ĒåĄĒĢśņŚ¼ ņ¦äĒ¢ēĒĢśņśĆļŗż.
Step 1: ļ©╝ņĀĆ, Ēīī(wave)ņÖĆ ņäĀņ▓┤(hull) ĻĘĖļ”¼Ļ│Ā ņÜ┤ļÅÖ(motion) ņé¼ņØ┤ņØś Ļ┤ĆĻ│ä ĒĢ┤ņäØņØä ņ£äĒĢ£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØä ņĀ£ņĢłĒĢśņśĆ ļŗż.
Step 2: ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØä ĻĄ¼ņČĢĒĢśĻĖ░ ņ£äĒĢ£ ņĀäļŗ¼ĒĢ©ņłś ņČöņĀĢ ļ░®ļ▓ĢņØä ņĀĢĒĢśņśĆļŗż.
Step 3: ņĀäļŗ¼ĒĢ©ņłś ņČöņĀĢņŚÉ ņĀüņÜ®ĒĢĀ ņŗżĒŚś ļŹ░ņØ┤Ēä░ļź╝ ĻĄ¼ņČĢĒĢśņśĆ ļŗż.
Step 4: ņŗżĒŚśņØä ĒåĄĒĢśņŚ¼ ņĀäļŗ¼ĒĢ©ņłśļź╝ ĒÜŹļōØĒĢśĻ│Ā, ĒÜŹļōØĒĢ£ ņĀäļŗ¼ ĒĢ©ņłśņØś ņĢłņĀäņä▒ņØä ĒÅēĻ░ĆĒĢśņśĆļŗż.
2.2 ņäĀņ▓┤ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖ
ņĀ£ņ¢┤Ļ│ĄĒĢÖ ņĖĪļ®┤ņŚÉņä£, Ēīī(wave)ņŚÉ ņØśĒĢ£ ņäĀņ▓┤(hull)ņØś ņÜ┤ļÅÖ (motion)ņØĆ ĒĢ┤ņäØ Ļ░ĆļŖźĒĢ£ ņŗ£ņŖżĒģ£ņ£╝ļĪ£ ļ¼śņé¼ĒĢĀ ņłś ņ׳ļŗż.
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņĀ£ņ¢┤Ļ│ĄĒĢÖņŚÉņä£ ņĀĢņØśļÉ£ ļŗ©ņØ╝-ņ×ģļĀź, ļŗ©ņØ╝-ņČ£ļĀź (single-input single-output, SISO)ņØś ņäĀĒśĢ-ņŗ£ļČłļ│Ć (Linear-Time Invariant, LTI) ņŗ£ņŖżĒģ£ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØä ĻĄ¼ņä▒ĒĢśņśĆļŗż.
Fig. 1ņØĆ z -ņśüņŚŁ(domain)ņŚÉņä£ ĒĢ┤ņäØļÉ£ LTI ņŗ£ņŖżĒģ£ņØś ņ×ģņČ£ ļĀź Ļ┤ĆĻ│äļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£, Xwave (z)ļŖö Ēīīļ×æ ņŗĀĒśĖļź╝ ļéśĒāĆļé┤Ļ│Ā, Hhull (z)ļŖö ņŗ£ņŖżĒģ£(ņ”ē, ņäĀņ▓┤)ņØś ņĀäļŗ¼ĒĢ©ņłś, Ymotion (z)ņØĆ ņäĀņ▓┤ ņÜ┤ļÅÖņØä ļéśĒāĆļéĖļŗż.
Fig.┬Ā1
Conceptual block diagram of linear-time invariant(LTI) system for the ship-motion estimation
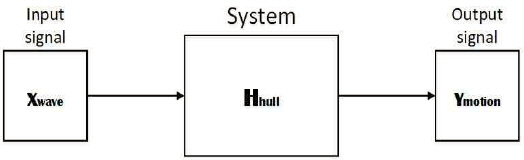
Fig. 1ņŚÉ ļéśĒāĆļéĖ ļ░öņÖĆ Ļ░ÖņØ┤, ņäĀņ▓┤ ņÜ┤ļÅÖ Ymotion (z)ņØĆ LTI ņŗ£ ņŖżĒģ£ņØś Ļ░ĆņŚŁņĀü ĒŖ╣ņä▒ņØä ņØ┤ņÜ®ĒĢśņŚ¼ Ēīīļ×æ ņŗĀĒśĖ Xwave (z)ņÖĆ ņĀäļŗ¼ĒĢ© ņłś Hhull (z)ņØś Ļ│▒ĒĢśĻĖ░ ņŚ░ņé░ņŚÉ ņØśĒĢ┤ņä£ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż. ļö░ļØ╝ņä£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØś Ļ┤ĆĻ▒┤ņØĆ ļåÆņØĆ ņĀĢļ░ĆļÅäņØś ņĀäļŗ¼ĒĢ©ņłś Hhull (z)ņØä ĻĄ¼ĒĢśļŖö Ļ▓āņØ┤ļŗż.
LTI ņŗ£ņŖżĒģ£ņØĆ ņŻ╝ņ¢┤ņ¦ä ņĀäļŗ¼ĒĢ©ņłśņŚÉ ļīĆĒĢ┤ņä£ ņ×ģļĀźĻ│╝ ņČ£ļĀź ņé¼ņØ┤ ņØś Ļ┤ĆĻ│äĻ░Ć ņŗ£Ļ░äņŚÉ ļö░ļØ╝ņä£ ļ│ĆĒĢśņ¦Ć ņĢŖļŖö ĒŖ╣ņ¦Ģ(ņ”ē, ņŗ£-ļČłļ│Ć)ņØä Ļ░¢ ĻĖ░ ļĢīļ¼ĖņŚÉ ņ×ģļĀźĻ│╝ ņČ£ļĀź ļ░Å ņĀäļŗ¼ĒĢ©ņłś ņé¼ņØ┤ņŚÉ Ļ░ĆņŚŁņĀü Ļ┤ĆĻ│äĻ░Ć ĒÖĢ ņĀĢļÉśņ¢┤ ņ׳ļŗż. ņØ┤ļ¤¼ĒĢ£ Ļ░ĆņŚŁņĀü Ļ┤ĆĻ│äļŖö ļŗżņØī ņŗØ(1)ļĪ£ ņäżļ¬ģĒĢĀ ņłś ņ׳Ļ│Ā, Hhull (z) = Ymotion (z)Xwave (z)-1ņØś Ļ┤ĆĻ│äļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĀä ļŗ¼ĒĢ©ņłśļź╝ Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£, Ymotion (z), Xwave (z) , Hhull (z)ļŖö z -ņśüņŚŁņŚÉņä£ ļéśĒāĆ ļéĖ ņČ£ļĀźņŗĀĒśĖ, ņ×ģļĀźņŗĀĒśĖ ĻĘĖļ”¼Ļ│Ā ņĀäļŗ¼ĒĢ©ņłśļź╝ Ļ░üĻ░ü ļéśĒāĆļéĖļŗż.
2.3 ņĀäļŗ¼ĒĢ©ņłś ņČöņĀĢ ļ░®ļ▓Ģ
ņ£äņØś ņŗØ(1)ņŚÉņä£, ņĀäļŗ¼ĒĢ©ņłś Hhull (z)ļŖö ņ×ģļĀź Xwave (z)ņÖĆ ņČ£ļĀź Ymotion (z)Ļ░Ć ņŻ╝ņ¢┤ņ¦Ćļ®┤ ĻĄ¼ĒĢĀ ņłś ņ׳ļŖöļŹ░, ņĪ░Ļ▒┤ņØĆ z -ņśüņŚŁņ£╝ļĪ£ ļéśĒāĆļéĖ LTI ņŗ£ņŖżĒģ£ņŚÉņä£ Hhull (z) = Ymotion (z)Xwave (z)-1ņØś ĒĢ┤ Ļ░Ć ņĪ┤ņ×¼ĒĢ┤ņĢ╝ ļÉ£ļŗż. ņØ┤ļ¤¼ĒĢ£ ņĪ░Ļ▒┤ņØä ļ¦īņĪ▒ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö Hhull (z) ņØä ĻĄ¼ĒĢśĻĖ░ ņ£äĒĢ£ ņāüĒā£ Ļ│ĄĻ░ä(state-space) ļ░®ņĀĢņŗØņØś ļÅäņ×ģņØ┤ ĒĢäņÜö ĒĢśļŗż.
ņØ┤ņé░ ņŗĀĒśĖņ▓śļ”¼ņŚÉņä£ SISOņØś LTI ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ£ ņāüĒā£ Ļ│ĄĻ░ä ļ░®ņĀĢņŗØņØĆ ļŗżņØī ņŗØ(2)Ļ│╝ Ļ░ÖņØ┤ ļéśĒāĆļé╝ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£ uļŖö ņ×ģļĀźņØ┤Ļ│Ā, xļŖö ņāüĒā£ ļ▓ĪĒä░ņØ┤ļ®░, yļŖö ņČ£ļĀźņØ┤Ļ│Ā, nņØĆ ņłśņŚ┤ņØś ļ▓łĒśĖļĪ£ņä£ n = 1, 2, 3, Ōŗ», N (NņØĆ ņāśĒöī ņłś)ņØ┤ļ®░, A, B, C, DļŖö Ļ│äņłś Ē¢ēļĀ¼ņØ┤ļŗż(Ljung, L, 1999).
ņŚ¼ĻĖ░ņä£, ņāüĒā£ ļ░®ņĀĢņŗØņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗ£ņŖżĒģ£ņØä ĒĢ┤ņäØĒĢśļŖö Ļ▓ĮņÜ░ņŚÉ ļŖö ņ£äņØś ņŗØ(2)ņØś Ļ│äņłśĒ¢ēļĀ¼ A, B, C, DņØä ĻĄ¼ĒĢśļ®┤ ļÉśņ¦Ćļ¦ī, z -ņśü ņŚŁņŚÉņä£ ĒĢ┤ņäØĒĢśĻĖ░ ņ£äĒĢ┤ņä£ļŖö Ļ│äņłśĒ¢ēļĀ¼ņØä ļīĆņŗĀĒĢĀ ņłś ņ׳ļŖö ņØ┤ņé░ ņĀäļŗ¼ĒĢ©ņłś H (z)ņØś ĒÜŹļōØņØ┤ ĒĢäņÜöĒĢśļŗż.
ņ£äņØś ņŗØ(2)ņŚÉ ļīĆĒĢ£ ņØ┤ņé░ ņĀäļŗ¼ĒĢ©ņłśļŖö ļŗżņØī ņŗØ(3)Ļ│╝ Ļ░ÖņØĆ ĒśĢ Ēā£ļĪ£ ļéśĒāĆļé╝ ņłś ņ׳ļŗż.
ņŚ¼ĻĖ░ņä£ L ņØĆ ņŗ£ņŖżĒģ£ņØä ļ¼śņé¼ĒĢśĻĖ░ ņ£äĒĢ£ ņä╣ņģś(section)ņØś ņłśļź╝ ļéśĒāĆļé┤Ļ│Ā, ļ▓ĪĒä░ aņÖĆ bļŖö ļŗżņØī ņŗØ(4)ļĪ£ ņĀĢņØśĒĢĀ ņłś ņ׳ļŖö ņĀäļŗ¼ĒĢ© ņłśņØś ļČäļ¬© Ļ│äņłśļōżĻ│╝ ļČäņ×É Ļ│äņłśļōżļĪ£ ĻĄ¼ņä▒ļÉ£ Ļ▓āņØ┤ļŗż. ĻĘĖļ”¼Ļ│Ā zļŖö ļ│Ąņåīņłśļź╝ ņØśļ»ĖĒĢśļŖö Ļ▓āņ£╝ļĪ£, ņØ╝ļ░śņĀüņ£╝ļĪ£ z = ejwņØś ĒśĢĒā£ļź╝ Ļ░¢ļŖöļŗż.
ņŚ¼ĻĖ░ņä£, nņØĆ Ļ│äņłś bņØś ņ░©ņłśļź╝ ļéśĒāĆļé┤Ļ│Ā, mņØĆ Ļ│äņłś aņØś ņ░© ņłśļź╝ ļéśĒāĆļéĖļŗż. ņ£äņØś ņŗØ(4)ņŚÉņä£ ļ¼ĖņĀ£ļŖö ņ¢┤ļ¢╗Ļ▓ī ņĄ£ņĀüņØś ņ░©ņłś n Ļ│╝ mņŚÉ ļīĆĒĢ£ Ļ│äņłś aņÖĆ bņØś Ļ░ÆņØä ĻĄ¼ĒĢĀ Ļ▓āņØĖĻ░ĆņØ┤ļŗż. ņØ┤ļ¤¼ĒĢ£ ļ¼ĖņĀ£ļŖö ņŗØ(2)ļČĆĒä░ ņŗØ(4)Ļ╣īņ¦ĆņØś Ļ│╝ņĀĢņØä ļ░śļ│ĄĒĢśņŚ¼ ĻĄ¼ĒĢĀ ņłś ņ׳ļŖö ļŹ░, ļīĆļŗ©Ē׳ ļ│Ąņ×ĪĒĢ£ Ļ│╝ņĀĢņØ┤ ĒĢäņÜöĒĢśļŗż. ĻĘĖļלņä£ ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö MATLABņŚÉņä£ ņĀ£Ļ│ĄĒĢśļŖö ņŗ£ņŖżĒģ£ ņŗØļ│ä ļÅäĻĄ¼ ļ░ĢņŖż(System Identification Toolbox)ņØś ŌĆśmpctoolŌĆÖ ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØś ņĀäļŗ¼ĒĢ©ņłś Ļ│äņłśļź╝ ĻĄ¼ĒĢśņśĆļŗż(Mathworks, 2015). ĻĘĖ ļ”¼Ļ│Ā ĒÜŹļōØĒĢ£ ņĀäļŗ¼ĒĢ©ņłśļŖö ņäĀņ▓┤ ņÜ┤ļÅÖņØś ņČöņĀĢļźĀĻ│╝ ĻĘ╣-ņśüņĀÉ (pole-zero) ĒĢ┤ņäØņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ¬©ļŹĖņØś ņĢłņĀĢņä▒ņØä ĒÅēĻ░ĆĒĢśņśĆļŗż. ņŚ¼ ĻĖ░ņä£ ņČöņĀĢļźĀņØĆ ņåÉņŗżĒĢ©ņłśņØś Ļ░£ļģÉņ£╝ļĪ£ ĒÅēĻĘĀņĀ£Ļ│▒ņśżņ░© ņŗØ(5)ņŚÉ ņØś ĒĢśņŚ¼ ļÅäĻĄ¼ļ░ĢņŖżļź╝ ņØ┤ņÜ®ĒĢ┤ ņČöņĀĢĒĢśņśĆļŗż.
ņŚ¼ĻĖ░ņä£ EļŖö ņåÉņŗżņ£©, ykļŖö ņøÉļלņØś ņŗĀĒśĖ, tkļŖö ņČöņĀĢļÉ£ ņŗĀĒśĖņØ┤ļŗż.
2.4 ņŗżĒŚś ļŹ░ņØ┤Ēä░
ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ ļ¬©ļŹĖņØś ĻĄ¼ĒśäņØä ņ£äĒĢ┤ņä£ļŖö ļ¬ģĒÖĢĒĢśĻ▓ī ņĀĢņØśļÉ£ ņŗ£Ļ░ä ņśüņŚŁņŚÉņä£ņØś ņ×ģņČ£ļĀź ņŗĀĒśĖĻ░Ć ĒĢäņÜöĒĢśļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ANSYS ņāüņÜ® ĒöäļĪ£ĻĘĖļשņØä ņØ┤ņÜ®ĒĢ£ ņĀäņé░ņ£Āņ▓┤ņŚŁĒĢÖ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņŗżĒŚś ļŹ░ņØ┤Ēä░ļź╝ ĒÜŹļōØĒĢśņśĆļŗż.
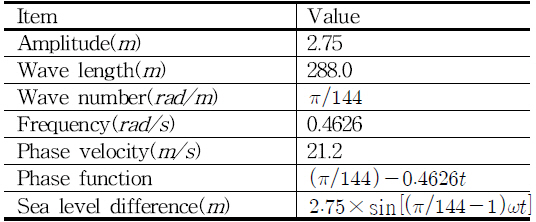
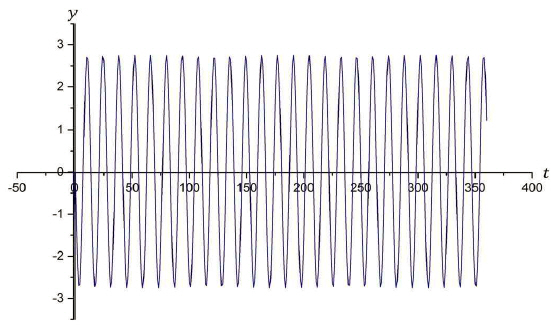
ļ©╝ņĀĆ, ņ×ģļĀź ņŗĀĒśĖļĪ£ņä£ņØś Ēīīļ×æ ņŗĀĒśĖļŖö Table 1Ļ│╝ Ļ░ÖņØ┤ ņĀĢĒĢśņśĆ ļŗż. Ēīīļ×æ ņŗĀĒśĖļŖö ĒīīĻ│Ā 2.75 ļ»ĖĒä░ņŚÉ Ēīīņן 288 ļ»ĖĒä░ļĪ£ ņĀĢĒĢśņśĆļŖö ļŹ░, ņØ┤ Ļ░ÆņØĆ ĒøäņłĀĒĢśļŖö ņŗŁļ¦ī Ēåż ĻĖē LNG ņäĀļ░ĢņØś Ēü¼ĻĖ░ļź╝ Ļ│ĀļĀżĒĢś ņŚ¼ ņ×äņØśļĪ£ ņĀĢĒĢ£ Ļ▓āņØ┤ļŗż. Fig. 2ļŖö Table 1ņØś ņĪ░Ļ▒┤ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņāØņä▒ĒĢ£ 360ņ┤ł ĻĖĖņØ┤ņØś Ēīīļ×æ ņŗĀĒśĖļź╝ ļéśĒāĆļéĖļŗż.
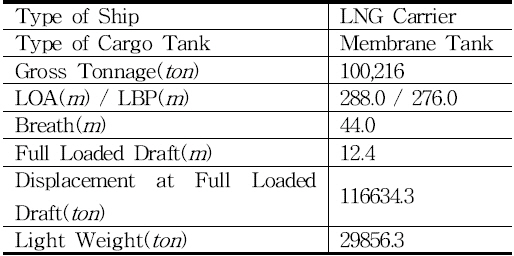
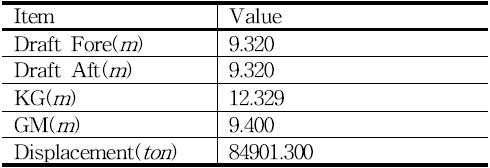
ĻĘĖļ”¼Ļ│Ā ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢņŚÉ ņĀüņÜ®ĒĢ£ ņäĀļ░ĢņØĆ Table 2ņÖĆ Ļ░ÖņØ┤ ņĀĢ ĒĢśņśĆļŗż. ņØ┤ ņäĀļ░ĢņØĆ 100,216 ĒåżņŚÉ ĻĖĖņØ┤Ļ░Ć 288 ļ»ĖĒä░ņØ┤Ļ│Ā ĒÅŁņØ┤ 44 ļ»ĖĒä░ņØĖ ļīĆĒśĢ LNG ņäĀņ£╝ļĪ£ ņäĀņ▓┤ņØś ĒśĢņāüņØĆ Delft-ShipņØä ņØ┤ņÜ®ĒĢ┤ ņĀ£ņ×æĒĢśņśĆļŗż(Delftship, 2019). ņØ┤ ņäĀļ░ĢņØś ņĀ£ņøÉņØĆ Kim et el.((2009)ņØ┤ ņé¼ņÜ®ĒĢ£ K-LNG ņäĀĒśĢņØś ņĀĢļ®┤ļÅäņÖĆ ņØ┤ ņäĀļ░ĢņŚÉ ļīĆ ĒĢ£ ņĀ£ņøÉĻ│╝ ņłśļ”¼ņŚŁĒĢÖ ĒģīņØ┤ļĖö(HHIC, 2009)ņŚÉņä£ ĒÜŹļōØĒĢ£ Ļ▓āņØ┤ļŗż.
ņĢäņÜĖļ¤¼ ņČ£ļĀźņŗĀĒśĖļĪ£ņä£ņØś ņäĀņ▓┤ ņÜ┤ļÅÖņØĆ ANSYS ĒöäļĪ£ĻĘĖļשņØä ņØ┤ņÜ®ĒĢśņŚ¼ ĒÜŹļōØĒĢśņśĆļŖöļŹ░, ņŚ¼ĻĖ░ņŚÉļŖö Fig. 3ņŚÉ ļéśĒāĆļéĖ ņ£Āņ▓┤ņןņØä ņØ┤ņÜ®ĒĢśĻ│Ā Table 3ņŚÉ ļéśĒāĆļéĖ ņĀüĒĢś ņāüĒā£ļź╝ Ļ░ĆņĀĢĒĢśņśĆļŗż.
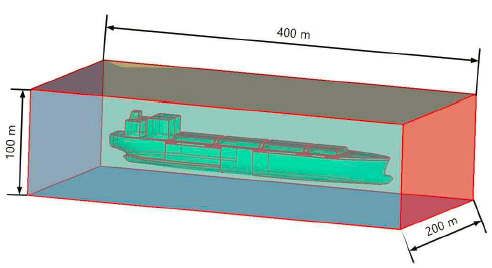
ņŚ¼ĻĖ░ņä£, Fig. 3ņØĆ ļō▒ ĻĘĀņ¦ł(Homogeneous)ļĪ£ Ļ░ĆņĀĢĒĢ£ LNG ņäĀ ļ░ĢņØä ANSYS ĒöäļĪ£ĻĘĖļשņØä ņØ┤ņÜ®ĒĢśņŚ¼ Ļ░Ćņŗ£ĒÖöĒĢ£ Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£, ņ£Āņ▓┤ņןņØś ļ░öļŗźņØĆ ņŗ¼ĒĢ┤ļź╝ Ēæ£ĒśäĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ņ×Éņ£Ā ņŖ¼ļ”Į (free-slip) ņĪ░Ļ▒┤ņØä ņŻ╝Ļ│Ā ņ£Āņ▓┤ņןņØś ņĖĪļ®┤Ļ│╝ ņāüļČĆļŖö ņŚ┤ļ”░ ļ®┤ņ£╝ļĪ£ ņäżņĀĢĒĢśņŚ¼ Ēīīļ×æņØ┤ ĒØśļ¤¼Ļ░ĆļÅäļĪØ ĒĢśņśĆņ£╝ļ®░ ļīĆĻĖ░ņĢĢ ņżæņØś ņĪ░Ļ▒┤ņØä ļČĆ ņŚ¼ĒĢ£ Ļ▓āņØ┤ļŗż. ļŗ©, ņÜ░ņĖĪ ļ▓Įļ®┤ņØĆ ĒīīņןņØś ņČ£ĻĄ¼ļĪ£ņä£ Ļ╣ŖņØ┤ņŚÉ ļö░ļźĖ ņĀĢņłśņĢĢņØä Ļ░£ļ░®ļÉ£ ļ®┤ņ£╝ļĪ£ ļČĆņŚ¼ĒĢśņśĆļŗż. Ļ▓®ņ×Éļź╝ ņāØņä▒ĒĢśļŖö ņāüņÜ® ĒöäļĪ£ĻĘĖļשņØĖ ICEM CFDļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĀäņ▓┤ ņ£ĀļÅÖ ņśüņŚŁņŚÉļŖö Tetra Meshļź╝ ņāØņä▒ĒĢśĻ│Ā ņäĀņ▓┤ ļ▓Įļ®┤ņŚÉļŖö Prism Ļ▓®ņ×Éļź╝ ņāØņä▒ĒĢś ņŚ¼ ņé¼ņÜ®ĒĢ£ ņ┤Ø Ļ▓®ņ×ÉņłśļŖö ņĢĮ 2,429,959 ļ¦īĻ░£ NodesņØ┤ļŗż. ļé£ļźś ļ¬© ļŹĖņØĆ SSTļ¬©ļŹĖņØä ņé¼ņÜ®ĒĢśņśĆņ£╝ļ®░, ņ×Éņ£ĀĒæ£ļ®┤ņØś Ļ▒░ļÅÖņØä ļ¬©ņé¼ĒĢśĻĖ░ ņ£äĒĢ┤ ļō▒ ĻĘĀņ¦ł ļŗżņāüņ£ĀļÅÖļ¬©ļŹĖņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
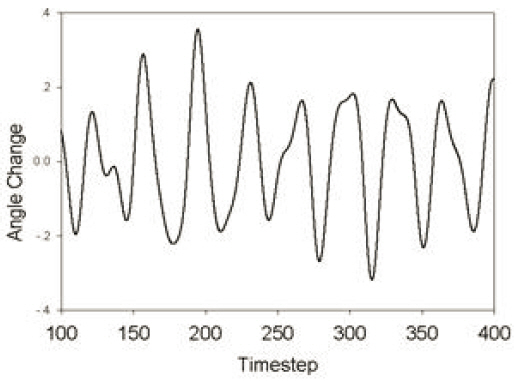
Fig. 4ļŖö ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ ĒÜŹļōØĒĢ£ ņäĀņ▓┤ ņÜ┤ļÅÖ ņżæņŚÉņä£ ļĪż ņÜ┤ ļÅÖ ļŹ░ņØ┤Ēä░ļź╝ ļéśĒāĆļéĖļŗż. ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņ£ĀļÅÖņן ļé┤ņØś ņäĀņ▓┤ņŚÉ ņäĀ ņłśļ»ĖņČĢņØś 1ņ×Éņ£ĀļÅä ĒÜīņĀäņÜ┤ļÅÖļ¦ī Ļ░ĆļŖźĒĢśļÅäļĪØ ņäżĻ│äĒĢśņŚ¼ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢņŚÉ ļĪż ņÜ┤ļÅÖļ¦īņØä ņØ┤ņÜ®ĒĢśņśĆļŖöļŹ░, ĻĘĖ ņØ┤ņ£ĀļŖö LNG ņäĀļ░ĢņŚÉņä£ ļŖö ņ×Éņ£ĀĒæ£ļ®┤ĒÜ©Ļ│╝Ļ░Ć ļ░£ņāØĒĢśņŚ¼ ļ│ĄņøÉļĀźņŚÉ ņśüĒ¢źņØä ņŻ╝ĻĖ░ ļĢīļ¼ĖņØ┤ļŗż. ņØ┤ļĢī ņ×Éņ£ĀĒæ£ļ®┤ĒÜ©Ļ│╝ņØś ņśüĒ¢źņØĆ ļĪż ņÜ┤ļÅÖ ņŗ£ ņØ┤ļÅÖĒĢśļŖö Ļ┤Ćņä▒ ļ¬©ļ®ś ĒŖĖ Ļ░ÆņØä ĻĖ░ļ░śņ£╝ļĪ£ Ļ│äņé░ĒĢśļŖö ņĀÉņŚÉņä£ ļĪż ņÜ┤ļÅÖņØĆ ņżæņÜöĒĢśļŗż. ļĪż ņÜ┤ ļÅÖņØä ņĀ£ņÖĖĒĢ£ ļŗżļźĖ 6ņ×Éņ£ĀļÅä ņÜ┤ļÅÖņŚÉ ļīĆĒĢ┤ņä£ļŖö ņČöĒøä ņŚ░ĻĄ¼ļź╝ ļæöļŗż.
3. ņŗżĒŚś ļ░Å Ļ▓░Ļ│╝
3.1 ļ¬©ļŹĖņØś ņČöņĀĢ Ļ▓░Ļ│╝
ĒÜŹļōØĒĢ£ ņ×ģņČ£ļĀź ņŗĀĒśĖļź╝ ņØ┤ņÜ®ĒĢ┤ ņĀäļŗ¼ĒĢ©ņłśļź╝ ĒÜŹļōØĒĢśņśĆļŗż. ĒĢ£ Ļ░£ļŖö ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļåÆĻ│Ā ļŗżļźĖ ĒĢśļéśļŖö ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļé«ņØĆ ņĀäļŗ¼ĒĢ©ņłśņØ┤ļŗż. ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśņŚÉ ļö░ļźĖ ņĢłņĀĢ ļÅäņÖĆ ņČöņĀĢļźĀņØä ļ╣äĻĄÉĒĢśĻĖ░ ņ£äĒĢ┤ 2Ļ░Ćņ¦Ć Ļ▓ĮņÜ░ļź╝ ņ×äņØśļĪ£ ņäĀņĀĢĒĢśņŚ¼ ļ╣äĻĄÉĒĢśņśĆļŗż.
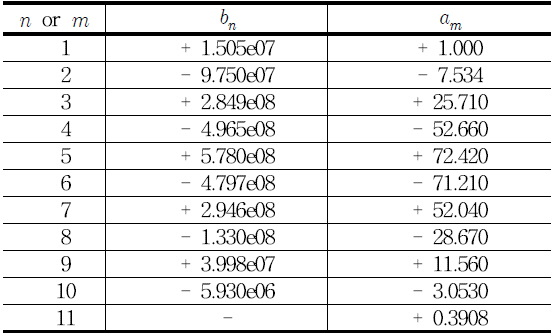
ļ©╝ņĀĆ 10ņ░©ņØś Ļ│äņłś bņÖĆ 11ņ░©ņØś Ļ│äņłś aļź╝ ņĀüņÜ®ĒĢ£ ņĀäļŗ¼ĒĢ©ņłś H1 (z) Ļ│äņłśļōżņØś Ļ░ÆņØä Table 4ņŚÉ ņĀĢļ”¼ĒĢśņŚ¼ ļéśĒāĆļāłļŗż.
7ņ░©ņØś Ļ│äņłś bņÖĆ 8ņ░©ņØś Ļ│äņłś aļź╝ ņĀüņÜ®ĒĢ£ ņĀäļŗ¼ĒĢ©ņłś H2 (z)ņØś ļōż Ļ│äņłśļōżņØś Ļ░ÆņØä Table 5 ņŚÉ ņĀĢļ”¼ĒĢśņŚ¼ ļéśĒāĆļāłļŗż.
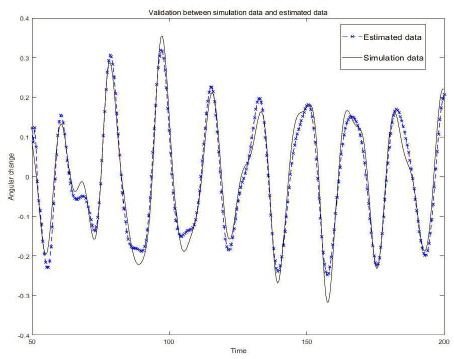
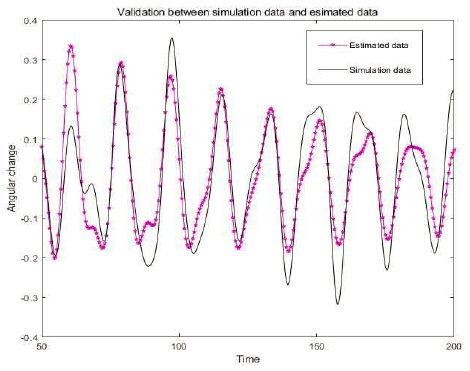
ņČöņĀĢĒĢ£ ņĀäļŗ¼ĒĢ©ņłśļź╝ ĻĖ░ļ░śņ£╝ļĪ£ LTI ņŗ£ņŖżĒģ£ņØś ĒŖ╣ņä▒ņØä ņØ┤ņÜ®ĒĢ┤ ņäĀņ▓┤ ņÜ┤ļÅÖņØä ņČöņĀĢĒĢ£ Ēøä, ņŗżĒŚś ļŹ░ņØ┤Ēä░ļĪ£ ņŻ╝ņ¢┤ņ¦ä ņäĀņ▓┤ ņÜ┤ļÅÖ Ļ│╝ ļ╣äĻĄÉĒĢśņśĆļŗż. Fig. 5ļŖö ņŗ£Ļ░ä ņśüņŚŁņŚÉņä£ ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļåÆ ņØĆ Ļ▓ĮņÜ░ņØś ļ╣äĻĄÉ Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£, ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņØ┤ņÜ®ĒĢ┤ ĒÜŹļōØĒĢ£ ļŹ░ņØ┤Ēä░ņÖĆ ņĀäļŗ¼ĒĢ©ņłśļź╝ ņØ┤ņÜ®ĒĢ┤ ĒÜŹļōØĒĢ£ ļŹ░ņØ┤Ēä░ļź╝ (5)ņØś ņŗØņØä ņØ┤ņÜ®ĒĢ┤ ļ╣äĻĄÉĒĢ£ Ļ▓░Ļ│╝ 79.5% ņØ╝ņ╣śĒĢśņśĆļŗż. ĒĢśņ¦Ćļ¦ī Fig. 6ņØĆ ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļé«ņØĆ Ļ▓ĮņÜ░ņØś ļ╣äĻĄÉĻ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģśņØä ņØ┤ņÜ®ĒĢ┤ ĒÜŹļōØĒĢ£ ļŹ░ņØ┤Ēä░ņÖĆ ņĀäļŗ¼ĒĢ©ņłśļź╝ ņØ┤ņÜ®ĒĢ┤ ĒÜŹ ļōØĒĢ£ ļŹ░ņØ┤Ēä░ļź╝ (5)ņØś ņŗØņØä ņØ┤ņÜ®ĒĢ┤ ļ╣äĻĄÉĒĢ£ Ļ▓░Ļ│╝ 50.0% ņØ╝ņ╣śĒĢś ļŖö Ļ▓░Ļ│╝ļź╝ ļÅäņČ£ĒĢśņśĆļŗż.
3.2 ļ¬©ļŹĖņØś ĻĘ╣-ņśüņĀÉ ĒĢ┤ņäØ Ļ▓░Ļ│╝
ĒÜŹļōØĒĢ£ ņĀäļŗ¼ĒĢ©ņłś ļ¬©ļŹĖņØś ņĀüĒĢ®ņä▒ņØä ĒīÉņĀĢĒĢśĻĖ░ ņ£äĒĢśņŚ¼ ĻĘ╣-ņśü ņĀÉ ĒĢ┤ņäØņØä ņŗżņŗ£ĒĢśņśĆļŗż. Fig. 7 ņØĆ ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļåÆņØĆ Ļ▓ĮņÜ░ņØś ĻĘ╣-ņśüņĀÉ ĒĢ┤ņäØ Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£, ļŗ©ņ£äņøÉ ļé┤ņŚÉ ĻĘ╣- ņśüņĀÉņØ┤ ļČäĒżĒĢśļ»ĆļĪ£ ņĀäļŗ¼ĒĢ©ņłś ļ¬©ļŹĖņØ┤ ņĢłņĀĢĒĢ©ņØä ņĢīņĢśļŗż. ĒĢśņ¦Ćļ¦ī Fig. 8ņØĆ ņŗ£ņŖżĒģ£ ņČöņĀĢņØś ņ░©ņłśĻ░Ć ļé«ņØĆ Ļ▓ĮņÜ░ņØś ĻĘ╣-ņśüņĀÉ ĒĢ┤ņäØ Ļ▓░ Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓āņ£╝ļĪ£, ļŗ©ņ£äņøÉ ņÖĖļČĆņŚÉ ņśüņĀÉņØ┤ ĒÜŹļōØļÉśņ¢┤ ĒĢ┤ļŗ╣ ļ¬© ļŹĖņØ┤ ļČłņĢłņĀĢĒĢ©ņØä ņĢīņĢśļŗż. Table 6ņØĆ ņ░©ņłśņŚÉ ļö░ļźĖ ļ¬©ļŹĖņØś ņ░©ņØ┤ ļź╝ ņä£ļĪ£ ļ╣äĻĄÉĒĢ£ Ļ▓░Ļ│╝ņØ┤ļŗż. ņØ┤ļ¤¼ĒĢ£ ļ╣äĻĄÉļŖö ļ¬©ļŹĖņØś ņČöņĀĢņØ┤ ņ£ĀņÜ® ņä▒ņØ┤ ņ׳ļŖöņ¦Ć ņ”ē, ņŗ£ņŖżĒģ£ ņČöņĀĢ ņ░©ņłśņŚÉ ļö░ļźĖ ņäĀņ▓┤ ņÜ┤ļÅÖ ņČöņĀĢ Ļ▓░ Ļ│╝ņØś ņ░©ņØ┤ļź╝ ņĢīĻĖ░ ņ£äĒĢ£ Ļ▓āņØ┤ļŗż.
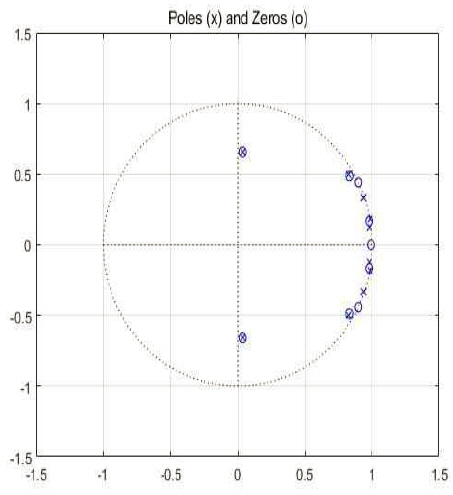
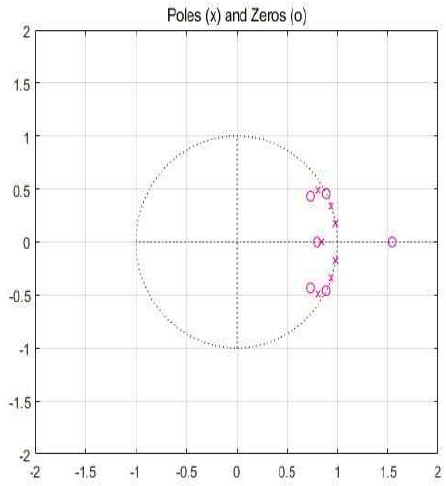
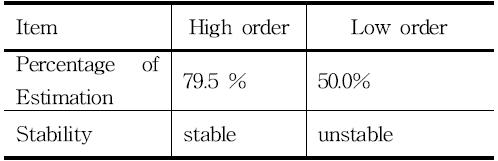
Table 6ņŚÉņä£, ņŗ£ņŖżĒģ£ ņČöņĀĢ ņ░©ņłśņØś ņ░©ņØ┤ņŚÉ ļö░ļØ╝ Ļ░üĻ░üņØś ļ¬©ļŹĖ ļōżņØĆ ņČöņĀĢļźĀĻ│╝ ņĢłņĀĢļÅäņŚÉ ņ░©ņØ┤ļź╝ ļ│┤ņśĆļŗż. ņśłļź╝ ļōżļ®┤ Ļ│Āņ░©ņøÉņØś ņŗ£ņŖżĒģ£ ņČöņĀĢ ņ░©ņłśļź╝ Ļ░Ćņ¦ä ļ¬©ļŹĖņØĆ 79.5%ņØś ņ£Āņé¼ņä▒ņØä Ļ░Ćņ¦ä ņäĀņ▓┤ ņÜ┤ļÅÖņØä ņČöņĀĢĒĢĀ ņłś ņ׳ņŚłņ£╝ļ®░ ņŗ£ņŖżĒģ£ņØś ņĢłņĀĢļÅäĻ░Ć ļåÆņĢśļŗż. ņØ┤ņŚÉ ļ░śĒĢśņŚ¼ ņĀĆņ░©ņøÉņØś ņŗ£ņŖżĒģ£ ņČöņĀĢ ņ░©ņłśļź╝ Ļ░Ćņ¦ä ļ¬©ļŹĖņØĆ ņČöņĀĢļźĀĻ│╝ ņŗ£ņŖżĒģ£ ņĢłņĀĢļÅä ļ¬©ļæÉ ņāüļīĆņĀüņ£╝ļĪ£ ļé«ņĢśļŗż. ĻĘĖļלņä£ ņŗ£ņŖżĒģ£ ņČöņĀĢ ņ░©ņłśņŚÉ ļö░ļØ╝ ņČöņĀĢļźĀĻ│╝ ņĢłņĀĢļÅäĻ░Ć ļåÆņØĆ ņČöņĀĢņØ┤ Ļ░ĆļŖźĒĢ©ņØä ņĢīņĢśļŗż.
4. Ļ▓░ ļĪĀ
ļ│Ė ņŚ░ĻĄ¼ņŚÉņä£ļŖö ņäĀĒśĢ-ņŗ£ļČłļ│Ć(Linear Time-invariant) ņŗ£ņŖż Ēģ£ņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäĀņ▓┤ ņÜ┤ļÅÖņØś ņĀäļŗ¼ĒĢ©ņłś ļ¬©ļŹĖņØä ņĀ£ņĢłĒĢśĻ│Ā, ņØ┤ ļ¬© ļŹĖņØä ņØ┤ņÜ®ĒĢśņŚ¼ ņäĀņ▓┤ ņÜ┤ļÅÖ ņŗ£ņŖżĒģ£ņØś ĒŖ╣ņä▒ņØä ņĀäļŗ¼ĒĢ©ņłśļĪ£ ņČöņĀĢĒĢś ņśĆļŗż. ņäĀņ▓┤ ņÜ┤ļÅÖ ņĀäļŗ¼ĒĢ©ņłś ļ¬©ļŹĖņØä ļ¬©ļŹĖļ¦ü ĒĢ£ Ļ▓░Ļ│╝ļĪ£ļČĆĒä░ ņ×äņØś ņØś Ēīīļ×æņŚÉ ņØśĒĢ┤ ļ░£ņāØĒĢ£ ņäĀņ▓┤ņØś ļĪż ņÜ┤ļÅÖ ņČöņĀĢņØ┤ Ļ░ĆļŖźĒĢśņśĆļŗż. ņŚ░ ĻĄ¼Ļ▓░Ļ│╝ļź╝ ņÜöņĢĮĒĢśļ®┤ ļŗżņØīĻ│╝ Ļ░Öļŗż.
ņ▓½ņ¦Ė, ņäĀņ▓┤ ņÜ┤ļÅÖ ĒŖ╣ņä▒ņØä ņČöņĀĢĒĢĀ ņłś ņ׳ļŖö ņĀäļŗ¼ĒĢ©ņłś ļ¬©ļŹĖņØä ņĀ£ņĢłĒĢśņśĆļŗż.
ļæśņ¦Ė, ņĀ£ņĢłĒĢ£ ļ¬©ļŹĖņØä ņĀüņÜ®ĒĢśņŚ¼ ņłśņ╣śņĀüņ£╝ļĪ£ ĒĢ┤ņäØĒĢśĻ│Ā ņČöņĀĢĒĢś ņŚ¼ ņ£ĀņØśņä▒ Ļ▓Ćņ”ØņØä ĒĢśņśĆļŗż. ņ£ĀņØśņä▒ Ļ▓Ćņ”ØņŚÉļŖö ĻĘ╣-ņśüņĀÉ ĒĢ┤ņäØņØä ĒåĄĒĢ£ ņŗ£ņŖżĒģ£ ņĢłņĀĢļÅä Ļ▓Ćņ”Øļ░®ļ▓ĢņØä ņé¼ņÜ®ĒĢśņśĆļŗż.
ļ│Ė ņŚ░ĻĄ¼Ļ▓░Ļ│╝ļź╝ ĒåĄĒĢśņŚ¼, 1) ļŗ©ņØ╝ ĒĢ┤ņ¢æ Ēīī ņĪ░Ļ▒┤ĒĢśņŚÉņä£ ņäĀņ▓┤ņØś ņÜ┤ļÅÖņØä ņČöņĀĢĒĢĀ ņłś ņ׳ņŚłĻ│Ā, 2) ņØ┤ļź╝ ĒåĄĒĢ┤ ņäĀņ▓┤ņÜ┤ļÅÖ ņČöņĀĢļ¬©ļŹĖņØ┤ ņ£ĀņØśņä▒ņØä Ļ░Ćņ¦ä ļ¬©ļŹĖņ×äņØä ņĢīņĢśļŗż. ĒĢśņ¦Ćļ¦ī ņŗ£ņŖżĒģ£ņØä ņäĀĒśĢ ņŗ£ļČł ļ│Ćņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśņśĆņ£╝ļ®░ SISOļØ╝Ļ│Ā Ļ░ĆņĀĢĒĢśņśĆĻĖ░ņŚÉ ņÖĖļ×Ć ļ░Å Ļ│╝ņĀüĒĢ® ņØś ĒĢ£Ļ│äĻ░Ć ņ׳ņŚłļŗż. Ē¢źĒøä, ļŗżņ¢æĒĢ£ ņĪ░Ļ▒┤ņØś ĒĢ┤ņ¢æ Ēīī ņĪ░Ļ▒┤ĒĢśņŚÉņä£ 6 ņ×Éņ£ĀļÅä ņÜ┤ļÅÖņØ┤ ļŗżņżæņČ£ļĀźļÉśļŖö ņĪ░Ļ▒┤ņØś 6ņ×Éņ£ĀļÅä ņĀäļŗ¼ĒĢ©ņłś ņČöņĀĢ ļ¬©ļŹĖņŚÉ Ļ┤ĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ņ¦äĒ¢ēĒĢśĻ│Āņ×É ĒĢ£ļŗż.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






