1. Introduction
Maritime transport has undergone gradual development over a long period of time, but in comparison, the means used for road travel or air travel have seen dramatic development within a short span of time. In order to resolve the issues that currently occur in maritime transport requires both significant effort and time. However, the issues could be resolved more easily than expected if they are seen from the perspective that is usually applied to road or air transport.
In maritime transport, technologies to prevent collisions have seen progress with the application of COLREG or Radar/ARPA but collisions still occur. In particular, with the increase in the number of small-sized ships or leisure boats with unskilled operators who have not fully understood the rules, collisions are never likely to decrease.
As such, in this study, measures to apply the TCAS(Traffic Collision Avoidance System) that has contributed greatly to the decrease in the number of collisions of aircrafts will be explored and the methods of application will be presented(
MLMA,2011). In addition, a system that helps the operator prevent collisions with the application of the data display method in the latest automobiles will be suggested.
2. Accident Prevention Measures by the Mode of Transport
In this chapter, the way each means of transport has addressed the issues will be reviewed. As shown in Table
1, various measures were adopted to address the issues with each transport mode but due to the difference in the number of passengers, the operational environment and costs, different solutions were applied. The overall trend is to improve the level of equipment using the latest technologies since the policies or rules to remove the environmental factors that may lead to accidents are nearly complete.
Table┬Ā1
Improvement of the Prevention Measures by the Mode of Transport
In the field of air travel, a large number of casualties are involved in the case of accidents. As such, new systems are quickly adopted. In particular, since the adoption of TCAS(
ICAO, 2006), it has become the norm to analyze each accident to make improvements to either the preventive system or the training system.
With railways, collisions are a rare occurrence and along with progress in technologies to decrease casualties in the case of accidents, proactive measures to prevent collisions are rapidly improving. Moreover, since land transport can more easily use wireless communication compared to air travel or maritime travel, progress in such preventive measures is moving at an even swifter rate.
Meanwhile, in the case of maritime transport, great effort has been made including the adoption of radars and the establishment of rules to prevent collisions, but the pace of progress has been slow compared to other transport modes.
An analysis of the cause of collisions in maritime traffic in the past five years (2014-2018) indicates that in most cases, the collision was due to not observing the borders, which is considered negligence in navigation(
KMST, 2019). In a majority of the cases, it was not until the distance from the other ship was shorter than one mile or when the collision had actually happened that the operator realized they were so close to the other ship(
KMST, 2019b). When categorized by the type of ship, there were significantly more collisions between the fishing ships or between a fishing ship and a non-fishing ship than the other cases(
KMST, 2019b), which raises the need for the development of a new warning system against collisions(
KMST, 2019a).
3. Traffic Collision Avoidance System
Unlike road transport or maritime transport modes, aircrafts cannot be halted in the air but can use a three-dimensional space. In a controlled airspace, a control system ensures aircrafts are flying at different altitudes, different locations, with different departure times or through different routes to prevent any collisions. Meanwhile, in the non-controlled airspace, a collision avoidance system is used to prevent collisions.
The TCAS is a safety net that operates independently from the control system. It is not run when the aircraft is moving on the ground(
ICAO, 2006). It is an independent safety measure that operates in both controlled and non-controlled airspace. The pilot must follow the orders of the control tower, and even without such orders if an alarm is triggered from the TCAS, he must respond accordingly. If the orders given from the control tower and the TCAS are different, then a response to the TCAS must first be carried out. This is because the TCAS is not simply one type of numerous equipment, but a system that incorporates the data received from numerous equipment to present a warning or solution for the prevention of collisions. However, since the size and weight of the equipment that can be installed on an aircraft is restrained, the system must be of a small size, and if possible, incorporated into the existing equipment.
The TCAS is a type of equipment installed in all aircrafts with a takeoff weight of more than 5,700kg or a capacity of 19 or more passengers(
ICAO, 2016). It is also referred to as the ACAS(Airborne Collision Avoidance System). But strictly speaking, the TCAS only refers to the hardware system whereas the ACAS includes not only the equipment for the collision warning system but also the training system for the pilots and control officer associated with the use of the equipment.
The TCAS sends out an alarm at a variable distance in accordance with the relative velocity for all aircrafts in the air of a certain scope. If there is a risk of collision, a TA(Traffic Advisory) in audio is triggered at the 5 sea miles point, and whether there is an aircraft located nearby is displayed. However, upon approaching an airport, too many alarms may be triggered causing confusion. As such, the alarm is not triggered when the aircraft is at an altitude of less than 400ft or when the landing equipment is prepared.
The TCAS I used during the early stages, only sent out TA and it was up to the pilot to determine whether to avoid the situation or not. But this is no longer used.
The TCAS II generates a RA(Resolution Advisory) if the risk of collision still exists even after the TA and the system presents an avoidance method. In Ver 6.0 of the TCAS II, unnecessary warnings at a low altitude are decreased. At present, the TCAS Ver.7.1 is used, which reflects the requirements of the ICAO. A number of new functions have also been added; For example, when an RA is generated, if movements are made in the opposite direction to what the system presented, a request for an opposite movement is made to the other aircraft. If the degree of avoidance maneuvering is insufficient to avoid a collision, then a wider breadth of maneuvering is requested.
At present, improvements are being made to introduce the TCAS III. At present, the avoidance maneuvering is presented as a rise or fall of altitude but in the future turns to the right or left will also be presented which will allow a wider breadth of CPA to be maintained. An avoidance method that is also cost-effective will be presented and improvement measures to increase the traffic capacity will also be included.
FAA subsidizes the research and development for progress in the TCAS. In the TCAS II, two types of avoidance methods are presented - either the ascent or descent - when an alarm is generated. But in the X version of the TCAS which is to be newly developed, the aircraft will be dynamically analyzed in the domain to present orders for not only an ascent or descent, but also turns to the right or left. This will lead to the most economical way of avoidance being first presented.
3.1 Components of TCAS
The TCAS is an independent collision prevention warning system. As shown in Figure
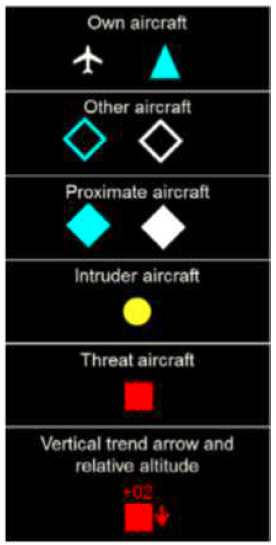
1, the data collected through the Mode-S Transponder is processed by the TCAS computer. To generate a RA/TA, the system consists of an antenna, control panel, RA/TA display, and audio warning device. At present, the TCAS forwards the data to the pilot by compiling the data collected by the satellite navigation device. Even when the manufacturers of the equipment are different, the display still uses the same symbol as shown in Figure
2 and the format of the audio warning is also the same.
Fig.┬Ā1
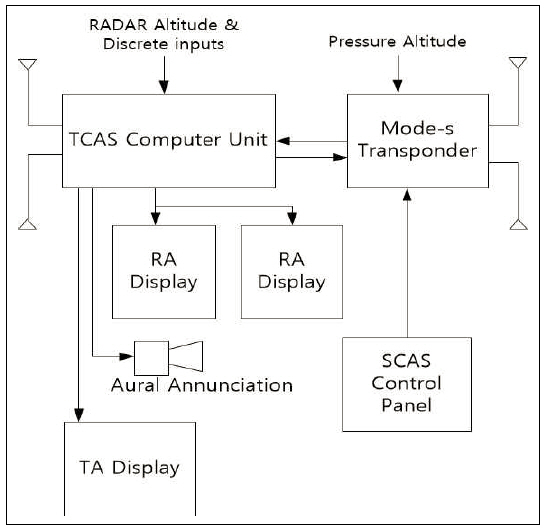
Fig.┬Ā2
Symbol of TCAS
Source : Introduction to TCAS II Ver.7.1,
FAA, 2011
3.2 Functions of TCAS
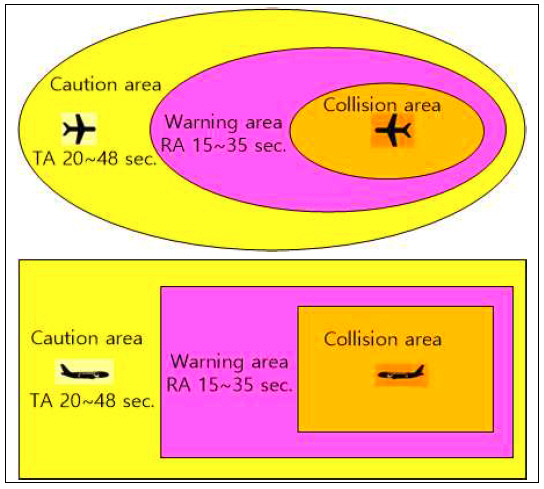
In the TCAS I, a TA is generated between 20 and 48 seconds depending on the relative velocity of the approaching aircraft. Fig.
3 shows alert range of TCAS. If the pilot acknowledges the risk and avoids the situation, thus removing the risk of collision, the TCAS no longer generates an alarm. In the TCAS, during avoidance there is a rise or fall of 1,500-4,400ft per minute. Only when there is a rise or fall of at least 500ft per minute can it be recognized by the ATC as to whether an avoidance is being carried out.
Fig.┬Ā3
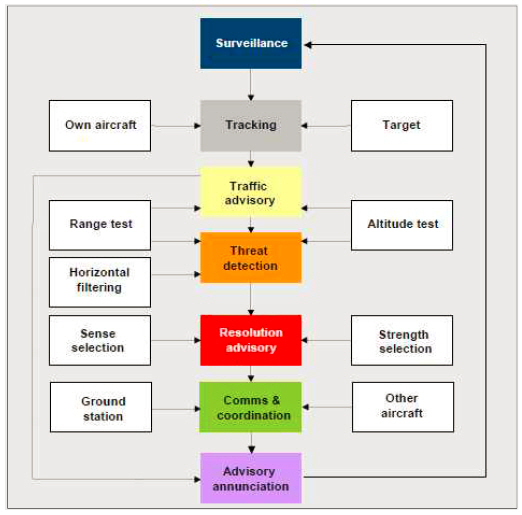
3.3 Operation Algorithm of TCAS
In the TCAS, the operation algorithm as seen in Figure
4 assesses the risk of collision and determines whether to generate a TA/RA alarm. In the early versions of the TCAS, the objective was to simply generate an alarm and as such a basic algorithm was used. But to generate a more appropriate RA alarm, communication started being applied to determine the more favorable avoidance method for aircrafts and have them carry out a more accurate avoidance.
Fig.┬Ā4
Operation Algorithm of TCAS
3.4 Use of TCAS
In the TCAS, depending on the direction of the approach, an alarm can be generated within a shorter period of time than anticipated. As seen in Figure
5, when the altitude rises or falls, an avoidance method is presented so that a larger CPA is secured. If the aircraft that is already descending continues its descent at the present rate and the CPA is deemed to be sufficient to avoid a collision, a level-off alarm is generated to indicate that the aircraft should return to its original altitude.
Fig.┬Ā5
TCAS Collision Avoidance Procedure
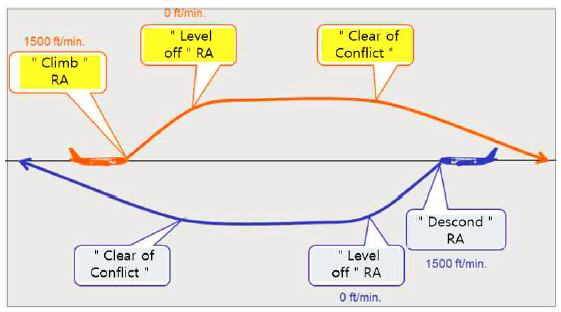
However, if the aircraft does not make a sufficient descent, it requests that the rate of descent be increased. If the avoidance method presented by the TCAS is not followed (i.e. if the altitude is not changed according to the order), then the opposite of the initially presented avoidance method is given to the other aircraft to ensure that a collision will be avoided. If the aircrafts are operated at the same altitude, one is given an order to increase the altitude, while the other is told to decrease the altitude. If the risk of collision no longer exists, then an order is given to return to the original altitude. The TA/RA in the TCAS must be used while at the same time taking into account that there is an error of about 100ft. Fig.
5 shows TCAS how to avoid collisions and voice guidance.
Since the signals from the transponder are relied upon, aircrafts with no transponders or whose transponder is not on cannot be identified. If a TA is generated, then the other aircraft can be avoided by identifying it with the eyes. Or if an RA is generated, the order can be followed for the avoidance of a collision. When an RA is triggered, there is not much time to make a judgment call and maneuvering for any avoidance must be carried out immediately. There may be unnecessary RAs but the benefits of following the RA far outweigh the risks and thus the RA should not be ignored. For certain aircrafts, if the pilot does not follow through with an RA, then the auto-pilot is operated and when the RA comes to an end the original altitude is restored.
For aircrafts that have the TCAP (TCAS alert prevention) triggered at a low altitude and are on an ascent, there are a series of functions to maintaining the altitude. For aircrafts that are on a descent, there is also a function that maintains the altitude. The TCAS ensures that unnecessary alarms are not triggered by starting its operation immediately before take-off and halting its operation immediately after landing. ICAO stipulates in its guidelines and manual that for the operation of the TCAS, the pilot and control officer must complete training in ACAS II(
FAA, 2011). The TCAS has its equipment inspected at regular intervals on the ground. Furthermore, the TCAS requires that training materials and reports on close-calls be distributed so that they can be used for regular training.
4. Considerations for the Seaborne Collision Avoidance System
4.1 Component of SCAS
The automatic identification system for ships that is currently in use is based on the GPS data of the ship to assess the risk of collision. But the system cannot provide useful information when there is an error with the GPS device. Since collisions need to be prevented even in the case of the errors of the GPS, there should be a method of communicating with nearby ships to assess and warn of the risk of a collision, by using devices that are similar to the transponders used in aircrafts. In other words, the SCAS, too, must become a collision avoidance system that is operated independently from other equipment in the same way that TCAS is operated. SCAS diagram is proposed at Fig.
6.
Fig.┬Ā6
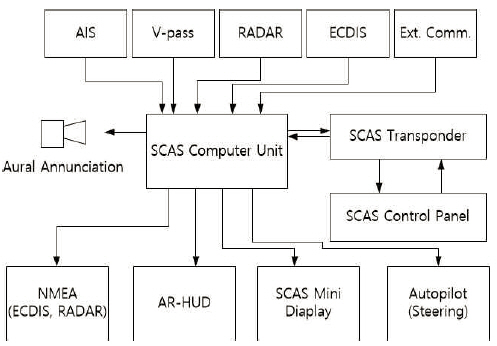
As such, the SCAS has been configured as a type of equipment that is similar to the TCAS but used on a ship, as shown in Figure
6. The SCAS consists of an AIS, the V-Pass that generates signals for the location of small ships, a radar that plays a significant role in collision prevention, an electronic map to assess the terrain data and equipment to communicate with other parties. But for an independent operation, it must be connected with the SCAS Transponder to share data with nearby ships. Even if it is not connected with other equipment installed on the ship, it must be configured in such a way that at least an TA/RA is presented.
The SCAS Computer determines the risk of a collision based on the collected data. If there is a collision risk, a TA is sent out with an audio warning. If an avoidance is not carried out or is carried out insufficiently and there is a degree of concern of entering a high-risk area in terms of a collision, an RA and an audio warning are generated. Proactive action must be taken in the high-risk situation for a collision by intervening in the automatic system.
4.2 Performance Technology of SCAS
Alert settings
If too many alarms are generated in an area with heavy maritime traffic, it may undermine the levels of reliability and not help with the avoidance of a collision. As noted in preceding studies, in such areas the CPA and the timing of when the TA/RA alarm is triggered must be set. If the timing of the alarm is not set, then a survey should be conducted to determine the timing first which can be adjusted at a later date based on any accidents that occur or the traffic load.
Response to the System Mal-function
If there is an internal error of the SCAS, only the TA must be operated and the user must be immediately notified of the error. In such a case, the user must employ a collision avoidance method within their view. A more in-depth study would be needed for scenarios where the order from the RA and the VTS on the SCAS are different, and whether the RA order must be followed first as in the TCAS. If avoidance maneuvering is not carried out despite the high-risk of a collision, then an automatic avoidance through synchronization with the auto pilot device and the route tracking of the electronic map would also be needed.
Shore Infrastructure for the System
In the TCAS, there is no additional land infrastructure installed to realize the system. It is the same for the SCAS but there is still a need for the inspections of the ship on shore if the ship did not take measures even after an alarm on the SCAS was generated. As such, a wireless data telecommunication system would then be needed.
The SCAS uses a transponder to identify the distance and direction of the other ships to determine the risk of collision and present the avoidance methods. But in order to ensure the avoidance methods are appropriate for the circumstances and are also economical, the system must be synchronized with the radar, electronic map and the automatic identification system that are helpful in preventing the ship from running aground. Even without the additionally installed equipment, the function to prevent collision must at the very least be operated.
Considerations for the User Level
The TCAS is mostly used by the pilot and the control officer. It has a relatively high training level and does not impose the burden of additional training. The skill levels of those who maneuver the ship vary greatly and there is often a strong resistance to training. The TCAS uses a very simple symbol and audio order with the sole purpose of preventing collisions. The SCAS, too, will have to be developed in a similar fashion. The electronic sea maps or radar currently in use poses great difficulty in avoiding collisions if the navigator lacks the necessary experience or skill. If the sole purpose is to prevent a collision, the SCAS, too, can use simple symbols to quickly identify ships that are at risk of collision and generate a TA or an RA if there is no time to accurately consider how to best avoid the collision.
The navigation equipment currently in use display all data on the gauge and also generates an audible alarm. But the display methods used in the latest automobiles which make it relatively easier for less skilled navigators to understand and follow the advice would have to be adopted.
Automobiles have undergone great improvements over the last few years with the goal of achieving autonomous driving. Technolisions have been adopted, as well as an HUD, or a head-up display to provide necessary information in a timely manner. Fig.
7 shows an example of AR-HUD. Voice and audio signals are also now in use. At this moment in time, an augmented reality-based HUD is in development and is expected to be applied soon. Given the nature of ships, foreign objects behind or to the side are often left unrecognized. These new types of display devices can be used to address these issues in the SCAS. Since displays with new technologies applied require training, an SCAS Mini Display to show only TA/RA would also have to be installed. However, for smaller ships that are used for leisure activities, there may not be enough room for such an installation. As such, the mini display alone should be sufficient to prevent any collision from occurring.
Fig.┬Ā7
Augmented Reality Head Up Display
Source : Texas Instrument AR Head up display white paper, 2017

4.3 Implementation Plan of the SCAS
The current method when installing the SCAS of considering the size, type, whether hazardous cargo has been loaded or the year the ship was built is not very reasonable. Since smaller ships used for leisure activities are more likely to benefit from the installation of the SCAS, installing it first on smaller ships that cruise along the coast should be considered in very much the same way as when the V-Pass was adopted. But if the SCAS is first installed on a ship that does not have high-functioning navigation equipment, some expenses would have to be subsidized. Insurance companies and the insurance co-op of ship owners that will benefit from a decrease in collisions would have to offer subsidization. In addition to the above, the following should also be considered:
1) There should be a way to upgrade the SCAS, if the issues are later discovered. While most navigation equipment on ships cannot be upgraded once installed, the SCAS needs to undergo frequent upgrades.
2) During the early stages of SCAS adoption, the set values should be adjusted to focus only on the prevention of a collision. If the number of collision cases fall, then any improvements on the economics can be made.
3) Most types of navigation equipment differ in how they display data or how they are used. Since the SCAS is the minimal equipment needed to prevent collisions, even if the manufacturers are different, there should be a standard to ensure that the method of use, display and alarm are uniform.
4) For aircrafts that move at a fast pace, simply by changing the altitude a number of encounters can be avoided at once. But for ships that move in a two-dimensional space, if there is a risk of collision, one maneuvering to avoid collision can in fact increase the risk of collision with another ship. As such, an avoidance-based navigation method rather than the navigation-priority method to be included in the TCAS X will be more useful.
5) If the risk of collision persists even after avoidance maneuvering, a request for a greater change to the angle or speed should be made.
6) If the opposite action of what was presented in the RA is taken, then an order must be immediately given to the other ship to take an opposite action before the first ship enters a high-risk area for collision.
7) If cooperation is needed when two ships encounter each other, an RA must be generated for both sides. If the risk of collision dissipates, an order must be given for the ships to return to their original path.
8) The maximum range of error that may occur in the simulation or the pilot test must be taken into account.
9) The SCAS does not operate the collision prevention function if the transponder does not work. As such, it should be ensured to be in operation on the VTS or a nearby ship and request the normal operation to the relevant ship.
10) An RA may experience errors but since the benefit of the RA operation outweighs the inconvenience of an error, it should be deemed dangerous to ignore the RA.
11) When ships that enter or leave a port encounter each other, the one leaving the port should be given priority, while the one entering the port should be told to reduce its speed in a safe area.
12) Operational data should be evaluated over the longer term and accidents that occur following the adoption of the SCAS should be analyzed to make improvements.
13) The operational state of the SCAS should be inspected before the ship leaves the port, daily or at each change in shift, or before entering a heavy traffic area.
Training for those using the SCAS should also be established. For automobiles, there are no policies that require training or the assessment of the user of newly added equipment. This is because automobiles are used in an environment where immediate support can be offered if there are issues.
Since immediate support is not possible for aircraft, whether an accident occurs depends on how well the equipment functions and how skilled the user is.
With ships, some training is mandatory for newly added equipment but they are often used when the user is not highly skilled. Since the SCAS is an independent type of equipment to prevent a collision, training should be added to ensure that an operator that has undergone the appropriate level of training and evaluation can be at the helm. With the TCAS, training materials and case studies on accidents are shared to encourage the regular training of the users. A distribution of materials that can be used in training along with an evaluation would also be required for the SCAS. Initial training should also be presented in the Radar/ARPA IMO model course.
The SCAS needs to be developed in consideration of the unique environment it will be used in, while also building on the existing system of the TCAS used for air traffic. It is important to note that it took a significant amount of time for the TCAS to have its concept established and for its mandatory to be installed. Since its adoption, many improvements have been made to date, with more planned in the future. If the development time of the SCAS can be shortened and the system can make a significant contribution to the prevention of collisions, confidence in the system will increase, making it easier to complete the system. The strengths of the TCAS should be included, but the unique environment at sea should be stringently considered and a pilot test must be carried out before the SCAS is adopted.
5. Conclusion
In order to reduce the development time of the SCAS, the technological requirements were analyzed in this study. In the end, the SCAS can simply be a hardware device to prevent collisions. Depending on how it is configured and improved, as well as how the user training is performed, it can contribute to a significant decrease in collisions in a similar manner to that of the number of collisions that have decreased in air transport. But if used incorrectly, it may also lead to an increase in the levels of confusion. In this study, the following technological elements were identified as needing to be addressed for the successful adoption of the SCAS.
1) The SCAS was proposed in this study based on the assumption that the SCAS would be a type of equipment used for the prevention of collisions only.
2) In addition to the equipment, training must also be supported.
3) Displays must be carried out in the simplest manner. The system should be configured for auto-pilot in the cases where the avoidance maneuvering is insufficient.
4) As with the TCAS, features and functions should be continuously upgraded.
A follow-up study is deemed necessary regarding the evaluation of a collision risk to generate an TA or RA, data collection to present the most appropriate avoidance method and the improvement of the control method when adopting the SCAS, to further contribute to the prevention of collisions.




 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






