

1. Вёю вАа
ВюёВё▒ьЋГв▓ЋВІюВіцьЁюВЮў ВЋйьЋю ВІаьўИВёИЖИ░вАю ВЮИьЋю ВиеВЋйВё▒Вю╝вАю ВЮИьЋ┤ ВДђВЃЂьїївЦ╝ ьЎюВџЕьЋю ВёИ Ж░ђВДђВЮў ьЋГв▓ЋВІюВіцьЁю(eLoran, NDGNSS, AIS)ВЮё ьєхьЋЕьЋ┤ Вџ┤ВўЂьЋўвіћ Ж▓ЃВЌљ вїђьЋю ВЌ░ЖхгЖ░ђ ВДёьќЅвљўЖ│а ВъѕвІц (ACCSEAS Project, 2014a). ВЮ┤ ВцЉВЌљВёю, eLoran ВІюВіцьЁюВЮђ ВЮ┤ в»И ьЋ┤ВЎИВЌљВёю ВІюв▓ћВџ┤ВўЂВЮё вДѕВ╣ю в░ћ ВъѕЖ│а (Offermans et al.,2015), ЖхГвѓ┤ВЌљВёю 2016вЁёвХђьё░ Вёав░ЋьЋ┤ВќЉьћївъюьіИВЌ░ЖхгВєївЦ╝ ВцЉВІгВю╝ вАю ВёюьЋ┤ ВЮ╝вХђВДђВЌГВЌљВёю ьЁїВіцьіИв▓авЊювЦ╝ ЖхгВХЋьЋўвіћ ВѓгВЌЁВЮё ВДёьќЅ ВцЉВЮ┤ вІц(Son et al., 2018a). Nationwide Differential Global Navigation Satellite System (NDGNSS)ВЎђ Automatic Identification Systems (AIS)віћ ьўёВъг ьЋГв▓ЋВџЕВю╝вАю Вџ┤ВўЂвљўЖ│а Въѕвіћ Ж▓ЃВЮђ ВЋёвІѕ ВДђвДї, NDGNSSВЮў Ж▓йВџ░ ВюавЪйВЌљВёю ВЮ╝вХђ ВІюВіцьЁюВЮў в│ђЖ▓йВЮё ьєхьЋ┤ ьЋГв▓ЋВЮ┤ Ж░ђвіЦьЋўвЈёвАЮ ВІювЈёьЋю в░ћ ВъѕВю╝вЕ░ (ACCSEAS Project, 2014b, ACCSEAS Project, 2014c), AISВЌљ вїђьЋўВЌгвіћ ВхюЖи╝ ВцЉЖхГ ВЌљВёю ьЎюв░юьЋўЖ▓ї ьЋГв▓ЋВџЕВю╝вАю ВЌ░ЖхгьЋўЖ│а ВъѕвІц (Zheng et al., 2016).
eLoran, NDGNSS, AIS ВІюВіцьЁюВЮђ ВєАВІаЖхГВЮў в░░В╣ўвѓў ВІаьўИ ВХю ваЦ, ВБ╝ьїїВѕў вЊ▒ ВёювАю вІцвЦИ ьі╣ВДЋВЮё в│┤ВЮ┤Ж│а ВъѕВю╝вЕ░ ВЃЂьўИ в│┤ВЎёВаЂВЮИ Ж┤ђЖ│ёвАю ьєхьЋЕьЋўВЌг ВѓгВџЕьЋўвЕ┤ ьџеЖ│╝ВаЂВЮИ ьЋГв▓ЋВІюВіцьЁюВю╝вАюВёю ЖИ░віЦ ьЋа Вѕў ВъѕвІц. в│И вЁ╝вгИВЌљВёювіћ ВёИ ВІюВіцьЁюВЮў ьі╣ВДЋЖ│╝ ВъЦвІеВаљВЌљ вїђьЋ┤ Ж░ЂЖ░Ђ ВёюВѕаьЋўЖ│а, ьєхьЋЕ ВѓгВџЕВІю Вќ╗ВЮё Вѕў Въѕвіћ ьЋГв▓ЋВё▒віЦВЌљ вїђьЋ┤ Вўѕ ВИАьЋўвіћ ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮё ВаюВъЉьЋўвіћ Ж│╝ВаЋВЌљ вїђьЋ┤ ВёцвфЁьЋювІц. вўљ ьЋю ВІюв«гваѕВЮ┤ВЁў Ж▓░Ж│╝вЦ╝ вІцВќЉьЋю ВІювѓўвдгВўцвЦ╝ ЖИ░в░ўВю╝вАю вЈёВХюьЋўЖ│а, ЖиИВЌљ вїђьЋю вХёВёЮВЮё ВѕўьќЅьЋювІц. ьі╣ьъѕ в│И вЁ╝вгИВЌљВёювіћ ВаёЖхГВЮў DGNSS ЖИ░ВДђЖхГВЌљВёю ВѕўВДЉьЋю ВІцВІаьўИ вЇ░ВЮ┤ьё░вЦ╝ ЖИ░в░ўВю╝вАю ьЋю ВъА ВЮї вфевЇИВЮё ВаЂВџЕьЋ┤ ЖИ░ВА┤ВЮў вІцвЦИ Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤в│┤вІц ВаЋьЎЋьЋю ВўѕВИАВЮ┤ Ж░ђвіЦьЋўвІцвіћ ВъЦВаљВЮ┤ ВъѕвІц.
вІцВЮїВЌљ вѓўВўг 2ВаѕВЌљВёювіћ eLoran, NDGNSS, AIS ВІюВіцьЁюВЮў ьі╣ВДЋВЌљ вїђьЋю ВєїЖ░ювЦ╝, 3ВаѕВЌљВёювіћ ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮ┤ вЈЎВъЉьЋўвіћ Ж│╝ВаЋВЌљ вїђьЋ┤ ВъљВёИьЋўЖ▓ї ВёцвфЁьЋювІц. 4ВаѕВЌљВёювіћ ВЌг вЪг Ж░ђВДђ ВІювѓўвдгВўцвЦ╝ в░ћьЃЋВю╝вАю ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ ВІюВіцьЁюВЮў ВўѕВИА Вё▒віЦ Ж▓░Ж│╝вЦ╝ вХёВёЮьЋювІц. вДѕВДђвДЅВю╝вАю 5ВаѕВЌљВёювіћ в│И вЁ╝вгИВЮў вѓ┤ВџЕ ВЮё Ж▓░Ж│╝ВаЂВю╝вАю ВаЋвдгьЋювІц.
2. ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ ВІюВіцьЁю ЖхгВё▒ВџћВєї
2.1 eLoran ВІюВіцьЁю
GNSSВЌљ вїђьЋю ВЮўВА┤Вё▒ВЮё вѓ«ВХћвЕ┤Вёю ВаёьїїЖхљвъђВЌљ Ж░ЋВЮИьЋа Вѕў Въѕ віћ ВА░Ж▒┤ВЮё вфевЉљ вДїВА▒ВІюьѓг Вѕў Въѕвіћ eLoran ВІюВіцьЁюВЮђ Ж░ђВъЦ ьўёВІц ВаЂВЮђ в│┤ВЎёьЋГв▓Ћ ВІюВіцьЁюВю╝вАю ВЮИВаЋв░ЏЖ│а ВъѕвІц (Grant et al., 2009). eLoran ВІюВіцьЁюВЮђ ЖИ░ВА┤ВЌљ ВѓгВџЕвљўвЇў Loran-C ВІюВіцьЁюВЮў Вё▒віЦВЮё ьќЦВЃЂВІюьѓе Ж▓ЃВю╝вАю, Ж░Ђ ВєАВІаЖхГВЮ┤ вфевЉљ Universal Coordinated Time (UTC)ВЌљ вЈЎЖИ░ьЎћвљўЖ│а Loran Data Channel (LDC)вЦ╝ ьєх ьЋю вЕћВІюВДђ ВаёвІгВЮ┤ Ж░ђвіЦьЋўвІцвіћ ьі╣ВДЋВЮ┤ ВъѕвІц (ILA, 2007).
Loran-C ВІюВіцьЁюВЮђ 100 kHzВЮў Ж│аВХюваЦ ьјёВіцЖИ░в░ўВЮў ВІаьўИвЦ╝ ВЮ┤ВџЕьЋўвіћвЇ░, ВѕўВІаЖИ░віћ ьјёВіц ВІаьўИвЦ╝ ВѕўВІаьЋ┤ ьЂгЖИ░ Ж░њВЮ┤ ВЮїВѕўВЌљ Вёю ВќЉВѕўвАю ВаёьЎўвљўвіћ ВёИ в▓ѕВДИ ВДђВаљВЮё ЖИ░ВцђВю╝вАю ВІаьўИВЮў Time of Arrival (TOA)вЦ╝ Ж│ёВѓ░ьЋювІц (RTCM SC 127, 2016). вІцвДї ЖИ░ВА┤ ВЮў Loran-C ВІюВіцьЁюВЌљВёювіћ ВѕўВІаЖИ░ ВІюЖ░ЂВаЋв│┤ВЎђ Loran-C ВєАВІа ЖхГ ВІюЖ░ЂВаЋв│┤вЦ╝ вЈЎЖИ░ьЎћ ВІюьѓг Вѕў ВЌєЖИ░ вЋївгИВЌљ Ж░Ђ ВєАВІаЖхГВЮ┤ ВаЋьЋ┤ ВДё ВІюЖ░ё Ж░ёЖ▓ЕВю╝вАю ВІаьўИвЦ╝ ВєАВХюьЋўЖ│а, ЖиИ вЈёВ░ЕВІюЖ░Ђ В░еВЮ┤вАю ВїЇЖ│А Вёа ьЋГв▓ЋВЮё ВѓгВџЕьЋ┤ ВИАВюёьЋювІц.
eLoran ВІюВіцьЁюВЌљВёювіћ вфевЊа ВєАВІаЖхГВЮ┤ UTC ВІюЖ░Ђ вЈЎЖИ░ьЎћ вљў Ж│а, LDCвЦ╝ ьєхьЋ┤ ВѕўВІаЖИ░Ж░ђ ВєАВІаЖхГВЮў ВІюЖ░ЂВаЋв│┤ВЎђ вЈЎЖИ░ьЎћ вља Вѕў ВъѕЖИ░ вЋївгИВЌљ ВІаьўИВЮў TOAвЦ╝ Ж│ёВѓ░ьЋа Вѕў ВъѕЖ│а, GNSSВЎђ Ж░ЎВЮђ в░ЕВІЮВю╝вАю ВюёВ╣ўвЦ╝ Ж│ёВѓ░ьЋа Вѕў ВъѕвІц. ВЮ┤вАю ВЮИьЋ┤ ЖИ░ВА┤ВЮў Loran-C ВІюВіцьЁюВЌљВёювіћ ВёювАю ВаЋьЋ┤ВДё ВІюЖ░ё Ж░ёЖ▓ЕВЌљ вћ░вЮ╝ ВІаьўИвЦ╝ ВєАВХюьЋўЖИ░ вАю в»Ивдг ВЋйВєЇвљю ВєАВІаЖхГвЊцВЮў ВІаьўИвАювДї ВИАВюёЖ░ђ Ж░ђвіЦьЋўвІцвіћ ьЋюЖ│ё вЦ╝ Жи╣в│хьЋўЖ│а, ВѕўВІаьЋю вфевЊа ВєАВІаЖхГВЮў ВІаьўИвЊцВЮё вЈЎВІюВЌљ ВюёВ╣ў Ж│ё Вѓ░ВЌљ ьЎюВџЕьЋа Вѕў Въѕвіћ ьЂ░ ВъЦВаљВЮ┤ ВъѕвІц. вўљьЋю в│┤ВаЋЖИ░ВцђЖхГВЮё ьєхьЋ┤ Ваёьїї ВІаьўИВЮў ВБ╝Вџћ ВўцВ░еВЏљВЮИВЮё в│┤ВЃЂьЋўвіћ в░Ев▓ЋВю╝вАю ВѓгВџЕВъљЖ░ђ ВЋй 20 m ВЮ┤вѓ┤ВЮў ВИАВюё ВаЋьЎЋвЈёвЦ╝ Ж░ђВДѕ Вѕў ВъѕвЈёвАЮ ьЋювІц(Son et al., 2018b, Son et al., 2019).
ьўёВъг ьЋюЖхГВЌљВёювіћ eLoran ьЁїВіцьіИв▓авЊю ЖхгВХЋВѓгВЌЁВЮё ВДёьќЅьЋўЖ│а ВъѕВю╝вЕ░, 2019вЁёЖ╣їВДђ ВЮИВ▓юВЌљ eLoran ВІюьЌў ВєАВІаЖхГВЮё ВёцВ╣ўьЋа Вўѕ ВаЋВЮ┤вІц. ЖиИваЄЖ▓ї вљўвЕ┤ ьўёВъг Вџ┤ВўЂ ВцЉВЮИ ьЋюЖхГ, ВцЉЖхГ, вЪгВІюВЋёВЮў Loran-C ВІюВіцьЁюВЮё eLoran ВІюВіцьЁюВю╝вАю ьЎюВџЕ Ж░ђвіЦьЋўвІц. ьЋўВДђвДї ьўёВъгВЮў eLoran ВІюВіцьЁю ЖхгВё▒Вю╝вАювіћ 20 mВЮ┤вѓ┤ВЮў ВИАВюё Вё▒віЦВЮё ВаюЖ│хьЋа Вѕў Въѕвіћ ВДђВЌГВЮ┤ ВёюьЋ┤ ВЮ╝вХђвАю ВаюьЋюВаЂВЮ┤вІц. Вёюв╣ёВіц ВДђВЌГ ВЮё ьЎЋВъЦьЋўЖИ░ ВюёьЋ┤Вёювіћ ВХћЖ░ђВаЂВЮИ ВєАВІаЖхГ ВёцВ╣ўЖ░ђ ьЋёВџћьЋўВДђвДї вХђ ВДђ ьЎЋв│┤ВЌљ ьўёВІцВаЂВю╝вАю Вќ┤вацВЏђВЮ┤ Въѕвіћ ьЋюЖ│ёЖ░ђ ВъѕвІц.
2.2 MF-DGNSS
GNSSвЦ╝ в│┤вІц ВаЋьЎЋьЋўЖ▓ї ВѓгВџЕьЋўЖИ░ ВюёьЋ┤ Ж░Ђ ВюёВё▒Вю╝вАювХђьё░ВЮў ВІаьўИВЌљ вїђьЋю ВўцВ░е ВаЋв│┤вЦ╝ ВЮ┤ВџЕьЋўвіћ NDGNSSЖ░ђ Вџ┤ВўЂвљўЖ│а Въѕ вІц. ЖхГвдйьЋ┤ВќЉВИАВюёВаЋв│┤ВЏљВЌљВёювіћ 17Ж░юВЮў NDGNSS ЖИ░ВцђЖхГ в░Ј Ж░љВІюЖхГВЮё Вџ┤ВўЂьЋўвЕ┤Вёю ВЃЮВё▒вљю Differential Differential Global Navigation Satellite System (DGNSS) ВаЋв│┤вЦ╝ ВЋй 300 kHz вїђ ВЌГВЮў в╣ёВйўЖ│╝ ВЮИьё░вёи вёцьіИВЏїьЂг, ЖиИвдгЖ│а ВіцвДѕьіИьЈ░ ЖИ░в░ўВю╝вАю Ваю Ж│хьЋўЖ│а ВъѕвІц. ВЮ┤ ВцЉ в╣ёВйўВЮё ьєхьЋ┤ в│┤ВаЋВаЋв│┤вЦ╝ ВєАВХюьЋўвіћ в░ЕВІЮВЮё MF-DGNSSвЮ╝Ж│а вХђвЦ┤вЕ░ ВЮ┤ ВІаьўИвЦ╝ ВЋйЖ░ёВЮў в│ђьўЋВЮё ьєхьЋ┤ ьЋГв▓Ћ ВЌљ ВЮ┤ВџЕьЋа Вѕў ВъѕвЈёвАЮ ьЋўвіћ ЖИ░ВѕаВЮ┤ Ж░юв░ювљўЖ│а ВъѕвІц.
ВЮ┤ ЖИ░ВѕаВЮђ ЖИ░ВА┤ВЮў ВІюВіцьЁюВЮё ВхювїђьЋю ВЮ┤ВџЕьЋ┤ ВаЂВЮђ в╣ёВџЕВю╝вАю вєњВЮђ ВаЋьЎЋвЈёВЮў ьЋГв▓ЋВЮ┤ Ж░ђвіЦьЋю ВІаьўИвЦ╝ ВєАВХюьЋа Вѕў ВъѕвІцвіћ Ж▓ЃВЮ┤ ВъЦВаљВЮ┤ВДђвДї, Ж░Ђ ВєАВХю ВІаьўИВЮў ВІюЖ░ЂвЈЎЖИ░Ж░ђ ВЎИвХђвАювХђьё░ ьЋёВџћьЋўвІц віћ вІеВаљВЮ┤ ВъѕвІц. ВЮ╝в░ўВаЂВю╝вАю ВєАВХю ВІаьўИВЮў ВІюЖ░ЂвЈЎЖИ░ в░Ев▓ЋВЮђ GNSSвЦ╝ ьЎюВџЕьЋю в░Ев▓ЋВЮё ВѓгВџЕьЋўВДђвДї, GNSSВЌљ вїђьЋю ВЮўВА┤вЈёвЦ╝ ВцёВЮ┤вацвіћ в│ИвъўВЮў вфЕВаЂВЮё Ж│авацьќѕВЮё вЋї вІцвЦИ ВІюЖ░ЂвЈЎЖИ░ьЎћ в░Ев▓ЋВЮ┤ ьЋёВџћьЋўвІц. ьЋюЖхГВЮђ ВІюЖ░Ђ вЈЎЖИ░ ВаЋв│┤вЦ╝ ВаюЖ│хьЋа Вѕў Въѕвіћ eLoran ВІюВіцьЁюВЮё ЖхгВХЋ ВцЉВЮ┤Ж│а ВЮ┤вЦ╝ ьЎюВџЕьЋ┤ ВєАВХю ВІюЖ░ЂВЮё вЈЎЖИ░ьЎћ ьЋа Вѕў ВъѕвІцвіћ ВИАвЕ┤ВЌљВёю MF-DGNSSвЦ╝ ВЮ┤ВџЕьЋю ВИАВюё ЖИ░ВѕаВЮў ьЎюВџЕЖ░ђ В╣ўЖ░ђ вЇћ вєњВЋёВДѕ Вѕў ВъѕвІц.
Ж▓ївІцЖ░ђ MF-DGNSSвіћ ьЋ┤ВќЉВДђВЌГВЌљВёю ьі╣ьъѕ ьЋГвДї ВъЁВХюьЋГ в░Ј ьўЉВѕўвАю ьєхьЋГ Вёав░ЋВЮў ВЋѕВаёВџ┤ьЋГВЮё ВюёьЋ┤ Вџ┤ВўЂвљўвіћ вДїьЂ╝, ьЋюЖхГВЮў ВБ╝Вџћ ьЋ┤ВќЉЖ│╝ ьЋГвДїВДђВЌГВЮ┤ Вёюв╣ёВіц Ж░ђвіЦьЋўвЈёвАЮ Вџ┤ВџЕвљўЖ│а ВъѕвІц. ЖиИваЄЖИ░ вЋївгИВЌљ MF-DGNSSВЮў ВІаьўИВЏљВЮё ьЋГв▓ЋВЌљ ВѓгВџЕьЋа Вѕў Въѕ вІцвЕ┤ eLoran ВІюВіцьЁювДїВю╝вАю В╗цв▓ёьЋа Вѕў ВЌєвіћ ВБ╝Вџћ ьЋ┤ВќЉ в░Ј ьЋГвДї ВДђВЌГВЌљВёю в│┤вІц вєњВЮђ Вё▒віЦВЮў ьЋГв▓Ћ Вёюв╣ёВіц ВаюЖ│хВЮ┤ Ж░ђвіЦьЋа Ж▓ЃВю╝ вАю ЖИ░вїђвљювІц.
2.3 AIS ВІюВіцьЁю
AISвіћ ьЋ┤ВЃЂВЌљВёюВЮў ВЋѕВаёВЮё ВюёьЋ┤ Very High Frequency (VHF) вїђВЌГВЮў ВаёьїїВІаьўИвЦ╝ ьєхьЋ┤ ВЌгвЪг Вёав░ЋВаЋв│┤ в░Ј Вџ┤ьЋГВаЋв│┤вЦ╝ ВЃЂьўИЖхљьЎў ьЋа Вѕў Въѕвіћ ВІюВіцьЁюВЮ┤вІц. ьўёВъг ьЋюЖхГВЌљВёювіћ В┤Ю 44Ж░юВєї ВЮў AIS ЖИ░ВДђЖхГВЮ┤ Вџ┤ВўЂвљўЖ│а ВъѕВю╝вЕ░, ьЋ┤ВќЉЖ▓йВ░░В▓ГВЮ┤ 3Ж░юВєї, ьЋ┤ВќЉ ВѕўВѓ░вХђЖ░ђ 41Ж░юВєївЦ╝ вІ┤вІ╣ьЋўЖ│а ВъѕвІц. ВЮ┤ ВцЉ В┤Ю 42Ж░ю ЖИ░ВДђЖхГВЮ┤ ВєА ВѕўВІаВЮ┤ Ж░ђвіЦьЋю ЖИ░ВДђЖхГВЮ┤вЕ░, AISвЦ╝ ВЮ┤ВџЕьЋю ьЋГв▓ЋЖИ░ВѕаВЮ┤ Ж░юв░ювљў вЕ┤ в░ўЖ▓й ВѕўВІГ ьѓгвАюв»Иьё░ ВЮ┤вѓ┤ВЌљВёю ВѓгВџЕВъљВЌљЖ▓ї ВХћЖ░ђВаЂВЮИ ВІаьўИВЮ┤ ВџЕЖИ░ьџївЦ╝ ВаюЖ│хьЋа Ж▓ЃВю╝вАю ЖИ░вїђвљювІц.
AIS ВІаьўИвЦ╝ ьЋГв▓ЋВІаьўИвАю ьЎюВџЕьЋўЖИ░ ВюёьЋ┤Вёювіћ DGNSSВЎђ вДѕВ░г Ж░ђВДђвАю ВєАВХю ВІаьўИвЦ╝ ВІюЖ░ЂвЈЎЖИ░ ВІюьѓцвіћ Ж▓ЃВЮ┤ ВцЉВџћьЋювЇ░, ВЌГВІю eLoran ВІюВіцьЁюВЮё ьЎюВџЕьЋ┤ ВІюЖ░ЂвЈЎЖИ░ьЋўвіћ Ж▓ЃВЮё Ж│авацьЋ┤ в│╝ Вѕў Въѕ вІц. DGNSSВЮў 300 kHz ВаёьїїВІаьўИЖ░ђ в░цВЌљвіћ skywaveВЮў ВўЂьќЦ Вю╝вАю ВаЋьЎЋвЈёЖ░ђ вѓ«ВЋёВДђЖИ░ вЋївгИВЌљ AIS ВІюВіцьЁюВЮё ВЮ┤ВџЕьЋю ьЋГв▓ЋВІа ьўИвіћ в░ц ВІюЖ░ёВЌљ ВДђВЃЂьїї ьєхьЋЕьЋГв▓ЋВІюВіцьЁюВЮў Вё▒віЦВЮё в│┤ВъЦьЋ┤ Вцё Вѕў Въѕвіћ ВцЉВџћьЋю ВЌГьЋаВЮё ьЋа Ж▓ЃВю╝вАю ЖИ░вїђвљювІц.
3. Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ Ж░юв░ю
ВЮ╝в░ўВаЂВю╝вАю ьЋГв▓ЋВІюВіцьЁюВЮў Вё▒віЦВЮё ьЈЅЖ░ђьЋа вЋї ВаЋьЎЋвЈё, Ж░ђВџЕ Вё▒, ВЌ░ВєЇВё▒, вг┤Ж▓░Вё▒ вЊ▒ВЮё Ж│авацьЋа Вѕў ВъѕвІц. в│И вЁ╝вгИВЌљВёю Ж░юв░юьЋю ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ ВІюВіцьЁюВЮў Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЌљВёювіћ ВаЋ ьЎЋвЈёВЌљ Ж┤ђьЋю Вё▒віЦВЮё ВўѕВИАьЋўвіћ Ж▓ЃВю╝вАю ьЋюВаЋвљўВќ┤ ВъѕвІц. ЖхгВ▓┤ВаЂ ВЮИ ВѓгВџЕВъљ ьў╣ВЮђ ВІюВіцьЁю ВџћЖхгВА░Ж▒┤ вЊ▒ВЮ┤ ВёцВаЋвљўвЕ┤ вІцвЦИ ВџћВєївЊц вЈё ВХћЖ░ђВаЂВю╝вАю Ж│авацвља Вѕў ВъѕвІц. вўљьЋю в│И ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮђ ьЋюЖхГ ВЮў ВЌ░ВЋѕ в░Ј в░ћвІцВЌљВёюВЮў ьЋГв▓Ћ Вё▒віЦВЮё ВўѕВИАьЋўЖИ░ ВюёьЋю Ж▓ЃВю╝вАю, ВюА ВДђВЌљВёюВЮў ВДђьўЋ в░Ј ВюаьџевїђВДђвЈёВаёВюеЖ│╝ Ж░ЎВЮ┤ ВюАВЃЂВЌљВёюВЮў Вё▒віЦВўѕ ВИАВЌљ ьЋёВџћьЋю ьїївЮ╝в»Иьё░віћ в░ўВўЂвљўВДђ ВЋіВЋўвІц.
3.1 ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮў ЖхгВА░
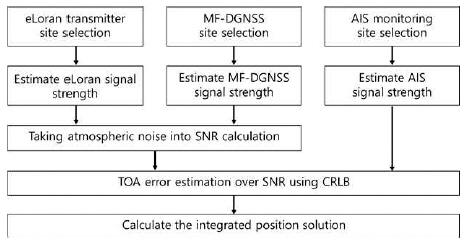
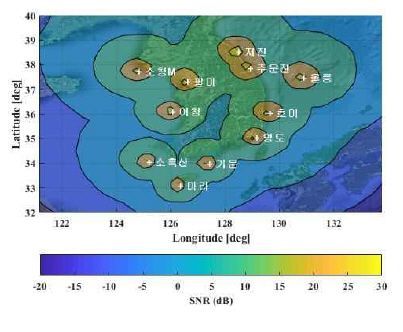
в│И вЁ╝вгИВЌљВёю Ж░юв░юьЋю Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮђ Fig. 1Ж│╝ Ж░Ў ВЮђ ЖхгВА░вАю вЈЎВъЉьЋўвЈёвАЮ ВёцЖ│ёвљўВЌѕвІц. ВѓгВџЕВъљЖ░ђ ВІюв«гваѕВЮ┤ВЁў ВѕўьќЅ ВЮё ВюёьЋ┤ eLoran/MF-DGNSS/AIS ЖИ░ВДђЖхГВЮў ЖхгВё▒ВЮё ВёаьЃЮьЋўвЕ┤, ВюёвЈё 32 - 40 вЈё, Ж▓йвЈё 121.5 - 133.5 вЈё вѓ┤ВЌљВёю Ж░Ђ ВєАВІаЖхГвЊц вАювХђьё░ВЮў ВІаьўИВёИЖИ░вЦ╝ ВўѕВИАьЋювІц. вўљьЋю ВІаьўИвїђ ВъАВЮїв╣ё Ж│ёВѓ░ВЮё ВюёьЋ┤ Ж░Ђ ВІюВіцьЁюВЌљВёю ВѓгВџЕьЋўвіћ ВІаьўИ ВБ╝ьїїВѕўВЌљ вДъвіћ вїђЖИ░ВъАВЮїВЮё ВХћВаЋьЋювІц. Вюё ВДђВЌГВЌљВёюВЮў ВІаьўИвїђ ВъАВЮїв╣ёЖ░ђ Вѓ░ВХювљўвЕ┤, Cramer-Rao Lower Bound (CRLB)вЦ╝ ВЮ┤ВџЕьЋўВЌг SNRВЌљ вћ░вЦИ Time Of Arrival (TOA) ВХћВаЋВЮў ВўцВ░евХёВѓ░ВЮё ВХћВаЋьЋўЖ▓ї вљювІц. вДѕВДђвДЅВю╝вАю ВІюв«гваѕВЮ┤ВЁўВЌљВёю ВѓгВџЕвљю Ж░Ђ ВєАВІаЖхГВЮў ЖИ░ьЋЎьЋЎВаЂ в░░ В╣ўВЎђ SNRВЮў вгИьё▒Ж░њ ВаюьЋюВЮё ВЮ┤ВџЕьЋ┤ Horizontal Dilution Of Precision (HDOP)ВЮё Ж│ёВѓ░ьЋўЖ│а, ВхюВбЁВаЂВю╝вАю ВаЋьЎЋвЈё Вё▒віЦВЮё Вўѕ ВИАьЋа Вѕў ВъѕвІц.
3.2 ВІаьўИВёИЖИ░ ВўѕВИА
в│И Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЌљВёю Ж│авацьЋўвіћ eLoran/MFDGNSS/ AIS ВІюВіцьЁюВЮђ ВёювАю вІцвЦИ ВБ╝ьїїВѕўВЎђ ВХюваЦВЮў ВІаьўИвЦ╝ Вѓг ВџЕьЋювІц. International Telecommunications Union (ITU)ВЌљВёю віћ Ж░Ђ ВІаьўИВЮў ВБ╝ьїїВѕў в│ёвАю Ж▒░вдгВЌљ вћ░вЮ╝ ВІаьўИЖ░ђ Вќ┤вќ╗Ж▓ї Ж░љВЄаьЋў віћВДђ ВЌ░ЖхгьЋю ВъљвБївЦ╝ в░юьЉюьЋўЖ│а ВъѕвІц.
eLoran ВІюВіцьЁюВЌљВёю ВѓгВџЕьЋўвіћ 100 kHz ВІаьўИВЎђ MF-DGNSS ВЮў Ж▓йВџ░ ITU-R P.368.7 (GROUND-WAVE PROPAGATION CURVES FOR FREQUENCIES BETWEEN 10 kHz AND 30 MHz)ВЮў ЖиИвд╝ 1 - 11ВЮё В░ИВА░ьЋ┤ ВІаьўИВёИЖИ░вЦ╝ ВўѕВИАьЋўВўђвІц. вІц вДї ITU вгИВёюВЌљВёюВЮў Ж▓░Ж│╝віћ ВІаьўИВХюваЦВЮ┤ 1 kHzВЮ╝ Ж▓йВџ░ВЮў Ж░њВЮ┤ ЖИ░ вЋївгИВЌљ вІцВЮї ВІЮ (1)ВЮё ьЎюВџЕьЋўВЌг ВІаьўИ ВХюваЦВЮў в│ђвЈЎВЌљ вїђьЋ┤ в│┤ВЃЂьЋўВўђвІц.
ВЌгЖИ░Вёю, SSeff віћ ВєАВХюВаёваЦВЮё Ж│авацьЋю ВўѕВИАВІаьўИ ВёИЖИ░, SS1kW віћ 1 kWвЦ╝ ЖИ░ВцђВю╝вАю Вѓ░ВХювљю ВІаьўИВёИЖИ░, Peffвіћ ВєАВХюВаёваЦ(kW) ВЮ┤вІц.
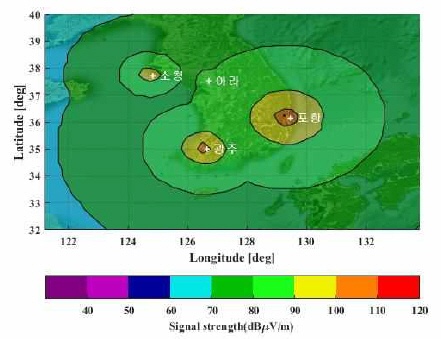
eLoran ВІюВіцьЁюВЮў Ж▓йВџ░ ьўёВъг Вџ┤ВўЂ ВцЉВЮИ ьЈгьЋГ, Ж┤ЉВБ╝ ВєАВІаЖхГВЮў ВєАВХюВаёваЦВЮђ Ж░ЂЖ░Ђ 150 kW, 50 kWВю╝вАю ВЋївацВаИ ВъѕВю╝вЕ░, ВЋъВю╝вАю ЖхгВХЋ ВўѕВаЋВЮИ ВЋёвЮ╝в▒ЃЖИИ ВІюьЌў ВєАВІаЖхГ, ВєїВ▓ГвЈё ВІаЖию ВєАВІаЖхГВЮў Ж▓й Вџ░ Ж░ЂЖ░Ђ 1 kW, 10 kWВю╝вАю ВЋївацВаИ ВъѕвІц. ВЮ┤вЦ╝ в░ўВўЂьЋўВЌг Ж│ёВѓ░ ьЋю eLoran ВІюВіцьЁюВЮў ВІаьўИВёИЖИ░віћ вІцВЮї Fig. 2ВЎђ Ж░ЎвІц.
Fig.┬а2
Signal strength prediction results of eLoran transmitters that is in operation or to be installed
MF-DGNSSВЮў Ж▓йВџ░, ЖхГВаюьЋГвАюьЉюВДђьўЉьџї(IALA)ВЌљВёю Ж░Ђ ВєА ВІаЖхГвДѕвІц Nominal rangeвЮ╝віћ ьїївЮ╝в»Иьё░вЦ╝ ьі╣ВаЋ Ж▒░вдгВЎђ ВІаьўИ ВёИЖИ░вАю ЖхгвХёьЋ┤ Ж│хЖ░юьЋўЖ│а ВъѕвіћвЇ░ ВЮ┤віћ ВЮ╝ВаЋ Ж▒░вдгВЌљВёю ВІаьўИВёИЖИ░ Ж░ђ ьі╣ВаЋьЋю Ж░њВЮ┤ вљўвЈёвАЮ Вџ┤ВўЂвљўЖ│а ВъѕвІцвіћ ВЮўв»ИВЮ┤вІц.
ВЮ┤вЦ╝ ьЎюВџЕьЋ┤ IALAВЮў GUIDELINE 1119 (MARINE BEACON COVERAGE PREDICTION)ВЌљВёювіћ ВІцВаю ВєАВХю Ваё ваЦВЌљ вћ░вЦИ ВІаьўИВёИЖИ░вЦ╝ ВўѕВИАьЋўвіћ в░Ев▓ЋВЮё ВаюВІюьЋўЖ│а ВъѕвІц. в│И вЁ╝ вгИВЌљВёювіћ IALA GUIDELINE 1119ВЌљВёю ВаюВЋѕьЋю в░Ев▓ЋВю╝вАю ьЋюЖхГ ВЮў MF-DGNSS ЖИ░ВцђЖхГВЮў Ж▒░вдгВЌљ вћ░вЦИ ВІаьўИЖ░љВЄавЦ╝ вІцВЮї Fig. 3Ж│╝ Ж░ЎВЮ┤ Ж│ёВѓ░ьЋўВўђвІц.
Fig.┬а3
Estimation of signal attenuation according to distance of MF-DGNSS reference station in Korea
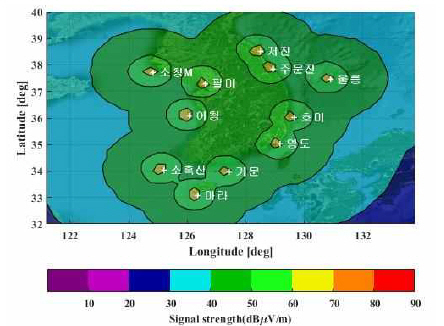
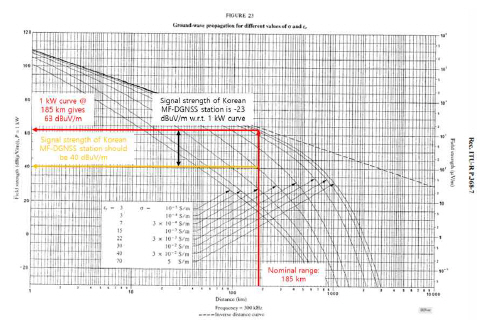
ьЋюЖхГВЮў MF-DGNSS ьЋ┤ВќЉЖИ░ВцђЖхГВЮў Nominal rangeвіћ 185 kmВЌљ 40 dB╬╝V/mвАю, ВєАВХюВаёваЦВЮ┤ 1 kWВЮ╝вЋївЦ╝ ЖИ░ВцђВю╝вАю ьЋў віћ Вюё ЖиИвъўьћё(Fig. 3)ВЌљВёювіћ 185 kmВЌљ ьЋ┤вІ╣ьЋўвіћ ВІаьўИВёИЖИ░ Ж░њ ВЮ┤ ВЋй 63 dB╬╝V/m ВъёВЮё ьЎЋВЮИьЋа Вѕў ВъѕвІц. ЖиИваЄвІцвЕ┤ ьЋюЖхГ MF-DGNSSВЮў ьЋ┤ВќЉЖИ░ВцђЖхГВЮў ВІаьўИВёИЖИ░віћ ВєАВХю ВаёваЦВЮ┤ 1 kW ВЮИ ВІаьўИ ВёИЖИ░ вїђв╣ё ВЋй 23 dB╬╝V/mВЮў ВўцьћёВЁІВЮё Ж░ђВДљВЮё ВЋї Вѕў ВъѕвІц. ВЮ┤вЪ░ Ж│╝ВаЋВЮё Ж▒░В│љ Вџ░вдгвѓўвЮ╝ВЮў 11 Ж││ВЮў ьЋ┤ВќЉ MF-DGNSS ЖИ░ВцђЖхГВЮў ВІаьўИВёИЖИ░вЦ╝ ВўѕВИАьЋўвЕ┤ Fig. 4ВЎђ Ж░ЎвІц.
AIS ВІюВіцьЁюВЮђ 161.975, 162.025 MHzВЮў ВІаьўИвЦ╝ ВЮ┤ВџЕьЋўЖ│а ITU-R P.370-7ВЌљВёю ьЋ┤вІ╣ ВБ╝ьїїВѕў вїђВЌГВЮў Ж▒░вдгВЌљ вћ░вЦИ ВІаьўИЖ░љ ВЄаВЌљ вїђьЋю ВаЋв│┤вЦ╝ В░ЙВЮё Вѕў ВъѕвІц. ьЋўВДђвДї ВІцВаювАю Вџ┤ВўЂвљўЖ│а Въѕвіћ AIS ВІюВіцьЁюВЮў ВІаьўИВёИЖИ░вЦ╝ ВўѕВИАьЋўвацвЕ┤ ВЋъВЮў вЉљ ВІюВіцьЁюЖ│╝ вДѕВ░г Ж░ђВДђвАю ITU вгИВёюВЌљВёю ВаюЖ│хьЋўвіћ Ж░њВЌљВёю ВІцВаю AISВЮў ВєАВХюВаёваЦ ВЮИ 12.5 WВЌљ вїђьЋю в│┤ВЃЂЖ░њВЮё ВІЮ (1)ВЮё ьЎюВџЕьЋўВЌг в░ўВўЂьЋ┤ВЋ╝ ьЋю вІц. вўљьЋю, AIS ВІюВіцьЁюВЮў ВІаьўИвіћ ВЋъВЮў вЉљ ВІюВіцьЁюЖ│╝ вІгвдг ьїїВъЦ ВЮ┤ ВДДВЋё ВєАВѕўВІаВъљ ВѓгВЮ┤ВЌљ ВА┤ВъгьЋўвіћ ВъЦВЋавг╝ВЌљ ьЂ░ ВўЂьќЦВЮё в░Џвіћ вІц. ЖиИваЄЖИ░ вЋївгИВЌљ AIS ВІаьўИВЮў ВєАВѕўВІаВъљВЮў вєњВЮ┤Ж░ђ ВѕўВІаВъљВЮў ВІаьўИВёИЖИ░ВЌљ ьЂ░ ВўЂьќЦВЮё в»ИВ╣ўЖ│а ЖиИ ВўЂьќЦВЮђ вІцВЮї ВІЮ (2)ВЎђ Ж░ЎвІц.
ВЌгЖИ░Вёю, cвіћ Ваёьїї Ж▓йвАюВЮў ВюаьўЋВЌљ вћ░вЦИ ВЃЂВѕўВЮ┤Ж│а, h2віћ ВѕўВІа ЖИ░ВЮў ВєАВІаЖИ░ВЌљ вїђьЋю ВЃЂвїђВаЂВЮИ вєњВЮ┤ВЮ┤вІц. в│И ВІюв«гваѕВЮ┤ВЁўВЌљВёювіћ Ваёьїї Ж▓йвАювЦ╝ ьЋ┤ВќЉВю╝вАю, ВѕўВІаЖИ░ВЮў ВєАВІаЖИ░ВЌљ вїђьЋю ВЃЂвїђ вєњВЮ┤вЦ╝ 10 mвАю ВёцВаЋьЋўВЌг ВІюв«гваѕВЮ┤ВЁўВЮё ВѕўьќЅьЋўВўђвІц. ВюёВЎђ Ж░ЎВЮђ Ж│╝ВаЋ ВЮё Ж▒░В│љ ВІаьўИ ВєАВХюВЮ┤ Ж░ђвіЦьЋю Вџ░вдгвѓўвЮ╝ВЮў В┤Ю 42Ж░ю AIS ЖИ░ВДђЖхГ ВЮў ВІаьўИВёИЖИ░вЦ╝ Ж│ёВѓ░ьЋўвЕ┤ Fig. 5ВЎђ Ж░ЎвІц.

3.3 ВъАВЮї вфевЇИВЮё Ж│авацьЋю ВІаьўИвїђ ВъАВЮїв╣ё Ж│ёВѓ░
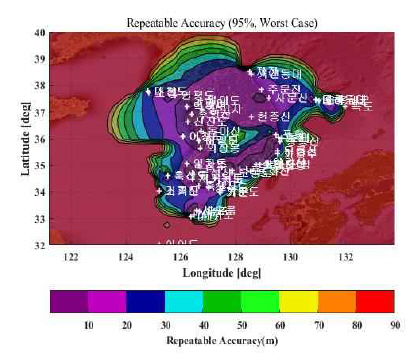
eLoran ВІюВіцьЁюВЮў 100 kHzВЮў вг┤ВёаВІаьўИвіћ вїђЖИ░вЦ╝ ВаёьїїьЋўвЕ┤ Вёю ВаёЖИ░ВаЂ ВъАВЮїВЮ┤ ВёъВЮ┤Ж▓ї вљювІц. ITUВЮў ВаёВІаВЮИ Consultative Committee on International Radio (CCIR)віћ ЖиИвЈЎВЋѕВЮў вїђЖИ░ВЮў ВаёЖИ░ВаЂ ВъАВЮїВЮё ВИАВаЋьЋю вЇ░ВЮ┤ьё░вЦ╝ ВЮ┤ВџЕьЋ┤ external antenna noise factor (Fa)вЮ╝віћ в│ђВѕўВЌљ вїђьЋю ьєхЖ│ёВъљвБївЦ╝ в░юьЉюьЋю в░ћ Въѕ вІц (CCIR, 1963). Faвіћ ьі╣ВаЋ Ж│ёВаѕ в░Ј ВІюЖ░ЂВЌљ вг┤ВєљВІц ВЋѕьЁївѓўвАю ВѕўВІављўвіћ Ваёьїї ВІаьўИВЮў ВёИЖИ░вЦ╝ ВЮўв»ИьЋўвіћвЇ░, ВЮ┤віћ ВюёВ╣ў, ВІюЖ░ё, Ж│ёВаѕ вЊ▒ВЌљ вћ░вЮ╝ в│ђьЎћьЋўЖИ░ вЋївгИВЌљ ВЮ╝ВаЋьЋю ВЃЂВѕў Ж░њВЮё Ж░ќвіћ Ж▓ЃВЮ┤ ВЋёвІѕвЮ╝ ьЎЋвЦав│ђВѕўвАю ВА┤ВъгьЋўЖ▓ї вљювІц. ITUВЌљВёювіћ 90%ВЌљ ьЋ┤вІ╣ьЋў віћ FaвЦ╝ в░░ьЈгьЋўЖ│а ВъѕВю╝вЕ░ в│И ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЌљВёювіћ 95% ВѕўВцђ ВЮў ВъАВЮїВЮё ВѓгВџЕьЋўЖИ░ вЋївгИВЌљ ВІЮ (3)ВЮё ьєхьЋ┤ 95%ВЮў вЦ╝ Ж│ёВѓ░ьЋўВўђ вІц (Lee, 2007).
Fa
,95% вЦ╝ ВЮ┤ВџЕьЋўвЕ┤ ВІЮ (4)вЦ╝ ьєхьЋ┤ Вџ░вдгЖ░ђ ВЋїЖ│аВъљьЋўвіћ вїђЖИ░ ВъАВЮї, ВдЅ Envelop noise voltageвЦ╝ Ж│ёВѓ░ьЋа Вѕў ВъѕвІц (CCIR, 1963).
ВюёВЮў ВІЮ (4)вЦ╝ ьєхьЋ┤ eLoranВЮў вїђЖИ░ВъАВЮїВЌљ вїђьЋ┤ Ж│ёВѓ░ьЋа Вѕў ВъѕЖ│а ВюёВЮў eLoran ВІаьўИВёИЖИ░ВЌљ вїђЖИ░ВъАВЮїВЮё в░ўВўЂьЋ┤ Вќ╗ВЮђ ВІаьўИ вїђ ВъАВЮїв╣ёВЮђ Fig. 6Ж│╝ Ж░ЎвІц.
MF-DGNSSВЌљВёю ВѓгВџЕьЋўвіћ ВЋй 300 kHzВЮў вг┤Вёа Ваёьїї вўљьЋю eLoranЖ│╝ вДѕВ░гЖ░ђВДђвАю вїђЖИ░ВъАВЮїВЌљ ВЮўьЋю ВўЂьќЦВЮё ьЂгЖ▓ї в░ЏвіћвІц. CCIR Report 322-2вЦ╝ ВЮ┤ВџЕьЋ┤ eLoranВЮў вїђЖИ░ВъАВЮїВЮё Ж│ёВѓ░ьЋўвіћ Ж▓ЃЖ│╝ ВюаВѓгьЋю в░ЕВІЮВю╝вАю, ЖиИвдгЖ│а ITU-R P.372-13ВЌљВёю ВаюЖ│хьЋўвіћ Ж░Ђ ВБ╝ьїїВѕў в│ё вїђЖИ░ВъАВЮїВЮў ВѕўВцђ В░еВЮ┤вЦ╝ в░ўВўЂьЋ┤ MF-DGNSSВЮў ВєАВІаЖхГв│ё ВБ╝ьїїВѕўВЌљ вћ░вЦИ вїђЖИ░ВъАВЮїВЮё Ж│ёВѓ░ьЋўВўђвІц. ЖиИ Ж▓░Ж│╝ ЖхГ вѓ┤ ьЋ┤ВќЉЖИ░ВцђЖхГ 11Ж░юВєїВЮў ВІаьўИвїђ ВъАВЮїв╣ёвіћ Fig. 7ВЎђ Ж░ЎвІц.

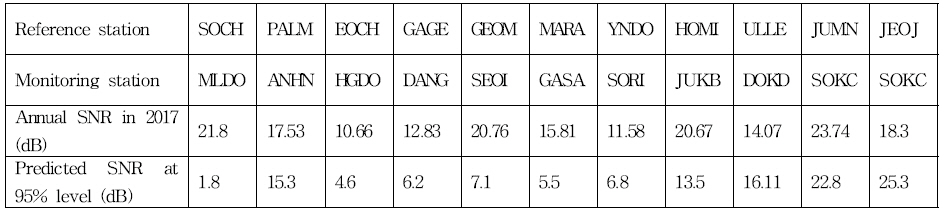
ьЋюьјИ ЖхГвдйьЋ┤ВќЉВИАВюёВаЋв│┤ВЏљВЌљВёювіћ ьЋ┤ВќЉЖИ░ВцђЖхГ 11Ж░юВєї, вѓ┤вЦЎ ЖИ░ВцђЖхГ 6Ж░юВєївЦ╝ Вџ┤ВўЂьЋўЖ│а ВъѕВю╝вЕ░ ВЮ┤вЦ╝ В┤Ю 17Ж░юВЮў Ж░љВІюЖхГВЌљВёю ВЃЂВІю Ж░љВІю ВцЉВЮ┤вІц. ВЮ┤ваЄЖ▓ї ВиевЊЮьЋю Ж░љВІю вЇ░ВЮ┤ьё░вЦ╝ ВбЁьЋЕьЋ┤ DGNSS ВЌ░Ж░ёВџ┤ВўЂв│┤Ж│аВёювЦ╝ в░юЖ░ёьЋювІц. в│И ВЌ░ЖхгВЌљВёювіћ Ж░Ђ Ж░љВІю ЖхГВЌљВёю 2017вЁёВЌљ ВІцВИА в░Ј ВиевЊЮьЋю вЇ░ВЮ┤ьё░вЦ╝ ьЎюВџЕьЋ┤ ITU вЇ░ВЮ┤ ьё░вЦ╝ ЖИ░в░ўВю╝вАю ьЋю ВўѕВИАЖ░њВЮў ВІавб░Вё▒ВЮё ьїљвІеьЋўвіћвЇ░ ВѓгВџЕьЋўВўђвІц.
Table 1ВЮђ 2017вЁё DGNSS ВЌ░Ж░ёВџ┤ВўЂв│┤Ж│аВёюВЮў ВЌ░ьЈЅЖиа ВІаьўИ вїђ ВъАВЮїв╣ё вЇ░ВЮ┤ьё░ВЎђ ITU вЇ░ВЮ┤ьё░вЦ╝ ЖИ░в░ўВю╝вАю ьЋўвіћ ВўѕВИАЖ░њВЮё в╣ёЖхљьЋю Ж▓░Ж│╝ВЮ┤вІц. ВЮ╝в░ўВаЂВю╝вАю ВЌ░ьЈЅЖиа вЇ░ВЮ┤ьё░віћ 95%ВЮў ьЎЋвЦавАю ВъАВЮїВЮё ВХћВаЋьЋю Ж▓Ѓв│┤вІц вЇћ ВбІВЮђ Ж░њВЮё Ж░ђВДљВЮё ьЎЋВЮИьЋа Вѕў ВъѕвІц. ВЮ╝вХђ ВєАВІаЖхГВЮў ВІаьўИвїђ ВъАВЮїв╣ё Ж░њВЮ┤ ВўѕВИАЖ░њв│┤вІц вќеВќ┤ВДђвіћ Ж▓ЃВЮђ ВІаьўИВёИЖИ░ ВъљВ▓┤ВЮў вгИВаю, Ваёьїї Ж▓йвАюВЃЂВЮў ВДђьўЋ вгИВаю вЊ▒ВЮ┤ ВўѕВЃЂвљў вЕ░ ВІцВаю Вџ┤ВўЂ ьўёьЎЕВЌљ вїђьЋю ВаЋв│┤Ж░ђ ВБ╝Вќ┤ВДёвІцвЕ┤ вЇћВџ▒ ВаЋв░ђьЋю ВъА ВЮї ВўѕВИАВЮ┤ Ж░ђвіЦьЋ┤ВДѕ Ж▓ЃВю╝вАю ЖИ░вїђвљювІц. в│И ВІюв«гваѕВЮ┤ВЁўВЌљВёювіћ 95% ВѕўВцђВЮў ВъАВЮїЖ│╝ вЈЎВІюВЌљ Table 1ВЌљВёюВЮў ВЌ░ьЈЅЖиа ВъАВЮїЖ░њВЮё вЈЎВІюВЌљ ьЎюВџЕьЋ┤, 95% ВѕўВцђВЮў ВаЋьЎЋвЈё в░Ј ВЌ░ьЈЅЖиа ВаЋьЎЋвЈёвЦ╝ вфевЉљ ВўѕВИАьЋўВўђвІц.
3.4 HDOP Ж│ёВѓ░Ж│╝ ВИАВюёВаЋьЎЋвЈё ВўѕВИА
Ж░Ђ ВІаьўИ ВєїВіцВЮў ВєАВІаЖхГ ВёаьЃЮВЮ┤ ВЎёвБївљўЖ│а ВІаьўИвїђ ВъАВЮїв╣ёвЦ╝ ВўѕВИАьЋўЖ│а вѓўвЕ┤, ВєАВІаЖхГВЮў ЖИ░ьЋўьЋЎВаЂ в░░В╣ўВЎђ ВІаьўИвїђ ВъАВЮїв╣ёВЮў вгИьё▒Ж░њВю╝вАю ВЮИьЋ┤ Ж▓░ВаЋвљўвіћ Horizontal Dilution of Precision (HDOP)ВЎђ ВІаьўИвїђ ВъАВЮїв╣ёвЦ╝ ьєхьЋ┤ Ж│ёВѓ░вљўвіћ ВўцВ░евХёВѓ░ВЮё ВЮ┤ВџЕ ьЋ┤ ВИАВюё ВаЋьЎЋвЈёвЦ╝ ВўѕВИАьЋа Вѕў ВъѕвІц. HDOPвіћ ВєАВІаЖхГЖ│╝ ВѕўВІаЖИ░ ВЮў ЖИ░ьЋўьЋЎВаЂ ВюёВ╣ўВЌљ ВЮўьЋ┤ Ж▓░ВаЋвљўвЕ░ ВѕўьЈЅВюёВ╣ў ВаЋьЎЋвЈёвЦ╝ Ж▓░ВаЋВДЊ віћ ВцЉВџћьЋю ВџћВєїВЮ┤вІц.
ВѕўВІаЖИ░ВЮў ВюёВ╣ўВЌљВёю Ж░Ђ ВєАВІаЖхГЖ░ёВЮў в░ЕВюёЖ░ЂВЮё ╬Иi вЮ╝Ж│а ьЋўвЕ┤, ЖИ░ьЋўьќЅваг Gвіћ ВІЮ (5)ВЎђ Ж░ЎВЮ┤ ЖхгВё▒вљювІц.
HDOPвіћ ЖИ░ьЋўьќЅваг GвЦ╝ ВЮ┤ВџЕьЋ┤ ВІЮ (6)ВЎђ Ж░ЎВЮ┤ ЖхгьЋа Вѕў ВъѕвІц.
ВѕўВІаьЋю NЖ░ю ВІаьўИВЮў ВўцВ░евХёВѓ░ВЮё Ж░ЂЖ░Ђ ¤ЃiвЮ╝Ж│а ьЋўвЕ┤, Ж░Ђ ВІаьўИ ВЮў ВўцВ░евХёВѓ░ВЮђ ВўѕВЃЂ ВІаьўИвїђ ВъАВЮїв╣ёвЦ╝ ВЮ┤ВџЕьЋ┤ Cramer-Rao Lower Bound (CRLB) ВХћВаЋВІЮВЌљ вїђВъЁьЋўВЌг ЖхгьЋа Вѕў ВъѕвІц. (ACCSEAS Project, 2014c). Ж░ђВцЉьќЅваг Wвіћ ВІЮ (7)Ж│╝ Ж░ЎВЮ┤ Ж│ё Вѓ░вљювІц.
ВІЮ (5)ВЎђ ВІЮ (7)ВЮё ьЎюВџЕьЋ┤ ВІЮ (8)Ж│╝ Ж░ЎВЮ┤ TOA ЖИ░в░ўВЮў ВИАВюё ВўцВ░еВЮў Ж│хвХёВѓ░ ьќЅвагВЮё ЖхгьЋа Вѕў ВъѕвІц.
4. ьЋ┤ВќЉВДђВЌГВЌљВёюВЮў ВІювѓўвдгВўцв│ё ВДђВЃЂьїї ьєхьЋЕьЋГв▓Ћ ВІюВіцьЁюВЮў Вё▒віЦВўѕВИА
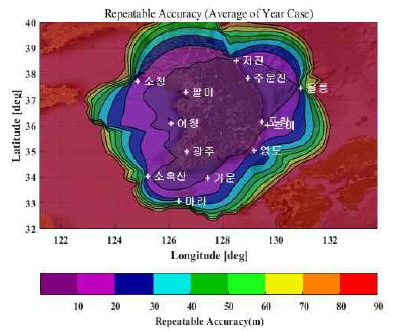
в│И ВаѕВЌљВёювіћ ВЋъВЌљВёю Ж░юв░юьЋю Вё▒віЦВўѕВИА ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮё ьєх ьЋ┤ ВўѕВИАьЋю HDOP, ВаЋьЎЋвЈё В╗цв▓ёвдгВДђ вЊ▒ВЮё вХёВёЮьЋўЖИ░ ВюёьЋю ьџеЖ│╝ ВаЂВЮИ ВІювѓўвдгВўцвЦ╝ ВёцВаЋьЋўЖ│а, ьЋ┤вІ╣ ВІювѓўвдгВўц в│ёвАю ВўѕВИАвљю Вё▒віЦ ВЮё ЖхГВаюьЋ┤ВѓгЖИ░ЖхгВЮў ьЋ┤ВќЉВѓгВџЕВъљ ВџћЖхгЖИ░Вцђвїђв╣ё вХёВёЮьЋю ьЏё ЖиИ Ж▓░ Ж│╝вЦ╝ ВаЋвдгьЋювІц.
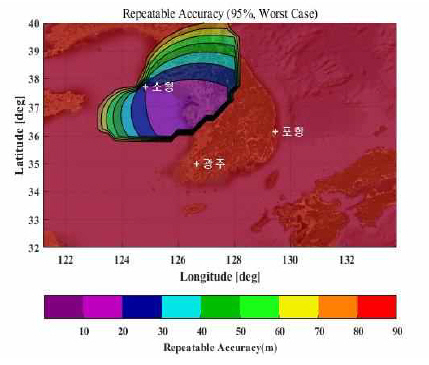
4.1 ВІювѓўвдгВўц I (eLoran вІевЈЁ)
в│И ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЌљВёювіћ eLoran ВІаьўИВЮў ВІаьўИвїђ ВъАВЮїв╣ёЖ░ђ 7 dB ВЮ┤ВЃЂВЮИ Ж▓йВџ░ВЌљвДї ВИАВюёЖ░ђ Ж░ђвіЦьЋю Ж▓ЃВю╝вАю ВёцВаЋьќѕвІц. ВєїВ▓ГвЈё eLoran ВєАВІаЖхГ ВІаьўИВёИЖИ░віћ Ж░ЂЖ░Ђ 50 kW, 150 kWВЮИ Ж┤ЉВБ╝ в░Ј ьЈгьЋГ ВєАВІаЖхГВЌљ в╣ёьЋ┤ вДцВџ░ ВЋйьЋю 1 kWвАю, ВИАВюёвЦ╝ ВюёьЋю ВюаьџевЈё вІгЖ▒░вдгЖ░ђ ВДДВЋё 20 m В╗цв▓ёвдгВДђЖ░ђ ВёюьЋ┤ ВЮ╝вХђВДђВЌГВЌљВёювДї ьўЋВё▒вљў віћ Ж▓ЃВЮё Fig. 8ВЌљВёю ьЎЋВЮИьЋа Вѕў ВъѕвІц.
4.2 ВІювѓўвдгВўц II (eLoran + MF-DGNSS)
eLoran ВІюВіцьЁю вДїВю╝вАю В╗цв▓ёвљўВДђ ВЋівіћ ВёювѓеьЋ┤, вѓеьЋ┤, вЈЎьЋ┤ вЊ▒ВЮё В╗цв▓ёьЋўЖИ░ ВюёьЋ┤ MF-DGNSS ВІаьўИвЦ╝ ьЋГв▓ЋВІаьўИвАю ьЎюВџЕьЋў Ж▓ї вљўвЕ┤ вІцВЮї Fig. 9Ж│╝ Ж░ЎВЮ┤ ВўѕВЃЂ ВИАВюёВаЋьЎЋвЈёЖ░ђ ьќЦВЃЂвљеВЮё ьЎЋ ВЮИьЋа Вѕў ВъѕвІц. MF-DGNSS вўљьЋю ВІаьўИвїђ ВъАВЮїв╣ёЖ░ђ 7 dB ВЮ┤ВЃЂ ВѕўВІављю Ж▓йВџ░ВЌљвДї ВѓгВџЕьЋа Вѕў ВъѕвЈёвАЮ ВёцВаЋвљўВЌѕЖ│а, eLoran вДїВЮё ВѓгВџЕьќѕВЮё вЋї В╗цв▓ёвдгВДђ ВЋѕВЌљ ьЈгьЋевљўВДђ ВЋіВЋўвЇў ВўЂВЌГВЮў вїђвІцВѕўЖ░ђ ьЈгьЋевљўВЌѕвІц.
ьЋўВДђвДї ВЌгВаёьъѕ ЖхГВаюьЋ┤ВѓгЖИ░ЖхгВЮў ВѓгВџЕВъљ ВџћЖхгВё▒віЦВЮИ 10 m ВЮ┤ вѓ┤ВЌљ вДјВЮђ ВДђВЌГВЮ┤ ьЈгьЋевљўВДђвіћ ВЋівіћ Ж▓ЃВю╝вАю в│┤ВЮИвІц. вДїВЋй вїђЖИ░ ВъАВЮїВЮў ВЌ░ьЈЅЖиа вЇ░ВЮ┤ьё░вЦ╝ ьЎюВџЕьЋ┤ ВИАВюё Вё▒віЦВЮё ВўѕВИАьЋювІцвЕ┤ Fig. 10Ж│╝ Ж░ЎВЮ┤ 10 m ВИАВюё Вё▒віЦВЌљ вїђьЋю В╗цв▓ёвдгВДђЖ░ђ ьЎЋвїђвљўвіћ Ж▓ЃВЮё ьЎЋВЮИьЋа Вѕў ВъѕвІц.
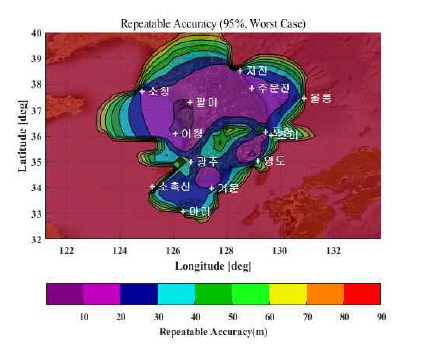
4.3 ВІювѓўвдгВўц III (eLoran + MF_DGNSS + AIS)
ВъАВЮївфевЇИВЮё ВЌ░ьЈЅЖиа ВІцВИА вЇ░ВЮ┤ьё░вЦ╝ ЖИ░в░ўВю╝вАю ьќѕВЮё вЋї вХђВѓ░ Жи╝В▓ўВЮў ВЮ╝вХђ ьЋ┤ВЋѕВЮё ВаюВЎИьЋўЖ│авіћ 10 m ВИАВюё Вё▒віЦВЮ┤ ВаюЖ│хвља Ж▓Ѓ Вю╝вАю ВўѕВЃЂвљўВДђвДї, MF-DGNSSВЮў Ж▓йВџ░ skywave ВўЂьќЦВю╝вАю в░ц ВІюЖ░ёВЌљвіћ Вё▒віЦВЮ┤ ьЂгЖ▓ї ВађьЋўвља Ж▓ЃВю╝вАю ВўѕВЃЂвљювІц. в│И ВІюв«гваѕВЮ┤ ВЁў ьѕ┤ВЌљВёювіћ skywaveВЮў ВўЂьќЦВЌљ вїђьЋю ВЌ░ЖхгЖ░ђ ВДёьќЅвљўВДђ ВЋіВЋё в░ўВўЂьЋўВДђ вф╗ьќѕВДђвДї, в░ц ВІюЖ░ёвЈЎВЋѕВЮў ВИАВюёВё▒віЦВЮђ Fig. 9ВЎђ в╣ёВіи ьЋю ВѕўВцђВю╝вАю ВХћВаЋвљювІц. ВЮ┤вЪ░ ВаљВЮё Жи╣в│хьЋўЖИ░ ВюёьЋ┤ AISВЮў ВІаьўИ вЦ╝ ьєхьЋЕьЋГв▓ЋВЌљ ьЎюВџЕьЋа Вѕў ВъѕЖ│а, ЖиИ ВўѕВЃЂ ВаЋьЎЋвЈёвіћ Fig. 11Ж│╝ Ж░ЎвІц.
5. Ж▓░ вАа
в│И вЁ╝вгИВЌљВёювіћ GNSSВЮў в░▒ВЌЁВІюВіцьЁюВю╝вАю ВѓгВџЕвља Вѕў Въѕвіћ ВДђ ВЃЂьїї ьєхьЋЕьЋГв▓Ћ Вёюв╣ёВіцВЮў Вё▒віЦВЮё ВўѕВИАьЋўвіћ ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮё Ваю ВъЉьЋўВўђвІц. ьўёВъг ВІюв▓ћВёюв╣ёВіцвЦ╝ Вцђв╣ё ВцЉВЮИ eLoran ВІюВіцьЁюВЮё ВцЉ ВІгВю╝вАю, MF-DGNSS, AIS ВІюВіцьЁюВЮё ьЋГв▓ЋЖИ░віЦВЮ┤ Ж░ђвіЦьЋўвЈёвАЮ Ж░ювЪЅьЋю ВІюВіцьЁюВЮё ьєхьЋЕьЋ┤ ВѓгВџЕьЋўвіћ Ж▓ЃВЮё Ж│ёьџЇьЋўЖ│а ВъѕвІц. в│И вЁ╝ вгИВЌљВёю Ж░юв░юьЋю ВІюв«гваѕВЮ┤ВЁў ьѕ┤ВЮђ ЖИ░ВА┤ВЌљ Ж░ђВъЦ вДјВЮ┤ ВЊ░ВЮ┤віћ ВХћ ВаЋв░Ев▓ЋВЮё ьЎюВџЕьЋўвЕ┤ВёювЈё ВѕўВДЉьЋю ВІцВаю ВъљвБївЦ╝ ВаЂВџЕьЋеВю╝вАюВЇе в│┤ вІц ВІавб░ьЋа Вѕў Въѕвіћ Ж▓░Ж│╝вЦ╝ в│┤ВЌгВцђвІцвіћ ВъЦВаљВЮ┤ ВъѕвІц. ВДђВЃЂьїї ьєх ьЋЕьЋГв▓ЋВІюВіцьЁюВЮў ВѓгВџЕ ВЌгвХђвЦ╝ Ж░Ђ ВІювѓўвдгВўц в│ёвАю ЖхгвХёьЋ┤ ЖиИ Вё▒ віЦВЮё ВўѕВИАьЋеВю╝вАюВЇе, ВџћЖхгВА░Ж▒┤ВЌљ вДъвіћ ВІюВіцьЁю ЖхгВХЋВЮё ВюёьЋ┤ ьЋё ВџћьЋю Ж▓ЃВЮё в»Ивдг Вцђв╣ёьЋа Вѕў ВъѕвІцвіћ ВаљВЌљВёю ВХћьЏё ВЌ░Жхг в░ЕьќЦВЮ┤вѓў ВЮИьћёвЮ╝ ЖхгВХЋВЌљ Ж┤ђьЋю ВаЋВ▒Ё Ж▓░ВаЋВЌљ ВъѕВќ┤Вёю ВюаВџЕьЋю ВъљвБїЖ░ђ вља Ж▓Ѓ Вю╝вАю ЖИ░вїђьЋювІц.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






