

1. 서 론
최근 조선해운업계에서도 제4차 산업혁명의 도래와 관련하 여, 자율운항선박(Maritime Autonomous Surface Ship; MASS)의 개발 및 운용에 대한 논의가 활발하게 이루어지고 있다. 2017년 6월에 개최된 IMO 해사안전위원회(MSC) 98차 회의에서 자율운항선박을 ‘다양한 자동화 수준에서 인간의 간 섭 없이 독립적으로 운용될 수 있는 선박’으로 정의하였으며, 99차 회의에서 국제적으로 공식 합의에 이르렀다(IMO, 2018). 즉, 자율운항선박이란 선박에게 주어진 임무에 필요한 안전과 운항 정보를 자동으로 수집·관리하고, 선박 스스로 판단하여 부분 또는 전체 항로를 자율적으로 운행하거나 부분적으로 원 격관제에 의해 운항이 가능한 선박이라고 할 수 있다. 향후 완 전한 자율운항선박의 시대가 도래하면 선원이 사라지고 육상 에서 운항사가 선박을 관리하고 운항하는 모습으로 바뀌겠지 만, 여전히 다양한 인적요인 이슈들이 존재한다.
본 논문에서는 2장에서 자율운항선박의 개요에 대해 소개 하고, 3장에서 자율운항선박의 개발 및 운용과정에 고려해야 할 주요 인적요인 이슈를 고찰하고자 한다. 또한 육상 운항사 (remote operator)의 자율운항선박 모니터링 및 제어에 따라 예상되는 인적요인 문제의 해결방안과 연구방향을 제시하고 자 한다.
2. 국내외 자율운항선박 연구동향
자율운항선박은 제4차 산업혁명 시대에 해사산업(Maritime Industry)에서 중요한 발전 분야이며, 해운·해사·항만·물류, 조 선 및 기자재 산업을 급속히 변화시키는 새로운 게임 체인저 (Game Changer)로, 관련 산업의 디지털화, 플랫폼화 및 지능 화를 가속화시키고 있다고 할 수 있다. 자율운항기술은 해양 사고 방지, 선박의 연비 증진, 비용 절감 등 긍정적인 측면과 함 께 선원의 일자리 감소, 업무의 변화, 보안문제 등 부정적인 측면 도 상존하고 있다(DNV·GL, 2018)(BV, 2017)(Park et al., 2018).
국외에서는 다양한 프로젝트의 수행을 통해 자율운항 선박 의 도입을 통해 운영 및 프로세스 최적화와 효율적인 자원관 리가 이루어져, 해상물류의 획기적 개선과 연평균 12.8%의 성장 이 이루어질 것으로 예상하고 있다(Seo, 2018)(Park et al., 2018). 유럽연합(EU)은 2012년부터 380만 유로 규모의 프로젝트 MUNIN(Maritime Unmanned Navigation through Intelligence in Networks)을 추진하였으며, 핵심기술로는 첨단 센서 모듈, 자율 원양 항해시스템, 원격 조종 지원 시스템, 주기관 모니터 링 및 제어 시스템, 에너지 효율 시스템, 유지 보수 상호 작용 시스템, 해안 제어 센터 등이다(MUNIN, 2017).
핀란드를 중심으로 한 다국적 프로젝트인 AAWA(The Advanced Autonomous Waterborne Applications) 프로젝트 는 차세대 자율운항선박의 설계 및 사양 도출을 목표로 2020 년 상업용 원격조종 선박을 개발, 2035년 완전 무인 자동화선 박 개발을 목표로 수행하고 있다(Laurinnen, 2016).
일본 최대 해운업체 NYK 등은 해양사고를 줄이기 위해 2025년까지 스마트 자율율운항 선박에 대해 공동개발 계획을 갖고, 인공지능을 활용한 자율운항시스템을 개발하고 있다. 2035년 완전 무인 자동화선박 개발을 목표로 수행하고 있으 며, 선박-육상 및 모듈-기기 간 송수신 되는 통신과 데이터 처리를 일원화하고 표준화하여 데이터 축적·분석을 가능케 하 는 개방형 플랫폼(SSAP; Smart Ship Application Platform) 을 개발 중이다(JSMEA, 2017)) .
중국은 오는 2021년 첫 무인 화물선 건조를 목표로 관련 얼 라이언스를 출범시키며, 세계 무인선 경쟁에 본격적으로 뛰어 들었다. 중국은 2017년 6월 말 중국선급 CCS와 HNA기술물 류그룹을 중심으로 무인 화물선 개발 얼라이언스 UCSDA(Unmanned Cargo Ship Development Alliance)를 출 범하였다(Lee, 2018)
국내는 해양수산부에서 ‘스마트 자율운항선박의 개발 및 해 운항만 운용서비스 개발’ 사업을 준비 중에 있으며, 완전자율 화 전 단계의 자율화 수준으로 시스템이 주변 환경을 인식하 고 스스로 판단하고 제어하는 선박 개발을 목표로 추진할 예 정이다. 핵심기술은 상황인식, 원격제어, 자율운항, 사전 유지 보수 예측기술, 운항조정 기술 등 5가지로 구성된다(Jang, 2018). 정부는 이러한 기술개발을 완료하여 해상물류비용 10~20% 절감, 해양 인적사고 30% 감축, 화물처리 속도 33% 향상을 목표로 하고 있다(Yoon, 2018).
한편 국내 대형 조선소를 중심으로 자율운항선박의 개발을 위한 하드웨어 중심의 기술개발이 이루어지고 있다. 현대중공 업, 대우조선해양, 삼성중공업에서는 독자적으로 스마트 선박 개발을 위한 로드맵을 수립하고, 자율운항시스템 및 선박 원 격제어 등의 대한 연구개발을 진행하고 있다(Lee, 2018).
정부주도의 자율운항선박 개발의 성공을 위해서는 사이버 보안, 빅데이터, 인력양성 및 교육, 일자리, 사고발생에 따른 책임소재, 인공지능의 윤리의식 이슈에 대한 폭 넓은 논의와 공감대 형성이 필요하며(Park et al., 2018), 선원의 교육훈련 측면에서 자율운항선박 운용을 위해 필요한 변화된 교육과정 개발과 사회문화적 측면에서 해양사고 발생시 책임소재와 배 상문제 및 인공지능의 오작동에 따른 역기능 문제 등에 대한 검토가 필요하다.
또한 노르웨이 자율운항선박 포럼(NFAS: The Norewegian Forum for Autonomous Ships)에서 Table 1에 제시한 선박의 자율화와 선박의 인력 운용 측면을 결합한 선박의 자율화 유 형(NFAS, 2107)에서 보는 바와 같이, 자율운항선박의 기술적 자율화 정도뿐만 아니라, 선원의 역할의 변화와 육상 제어와 관련된 이슈들의 검토도 필요하다.

3. 자율운항선박과 인적요인
3.1 국내외 연구현황
자율운항선박 개발 및 운용과정에서 고려해야 할 인적요인 이슈에 대한 국내외 연구사례는 많지 않다.
Ahvenjärvi(2016)은 완전한 무인 자율운항선박에서도 육상 운영자의 인적오류와 같은 인적요인 문제는 여전히 존재하며, 동일한 해역에서 유인선박과 무인선박의 인터렉션 과정에서 발생할 수 있는 문제 등 새로운 유형의 인적 오류의 발생가능 성을 언급했다.
자율운항선박의 개발을 통해 고도의 자격을 갖추고 경험이 풍부한 선원들에게 육상 센터(shore control center)에서의 자 율운항선박 관제 등의 새로운 직업이 창출될 수 있다는 보고 도 있다(Rodseth and Burmeister, 2012).
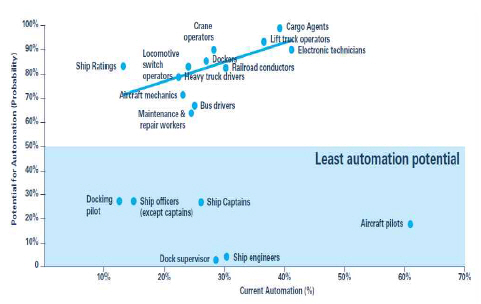
또한 2019년에 세계해사대학(World Maritime University) 에서 발간된 “Transport 2040: Automation, Technology, Employment - The Future of Work” 보고서에서 언급된 Fig. 1 의 운송분야에서의 직종별 자동화 가능성에 의하면, 선장 및 항 해사관 등의 고급 해기사는 부원 등의 하급 해기사에 비해 자동 화될 가능성이 상대적으로 낮은 것으로 나타났다(WMU, 2019).
국내에서는 2017년 142명의 상선선원을 대상으로 연구된 무인화 선박에 대한 한국 선원들의 인식에 대한 설문조사에 의하면, 대부분이 무인화 선박이 해양 사고를 절감하는데 크 게 기여하지 않을 것이며, 10년 이후에나 상용화될 것으로 예 상했다. 또한 육상센터에서 무인화 선박에 대한 원격제어와 모니터링은 적정 면허와 경력을 보유하고 있는 선원에 의해 이루어져야 한다고 응답했다(D’agostini et al., 2017).
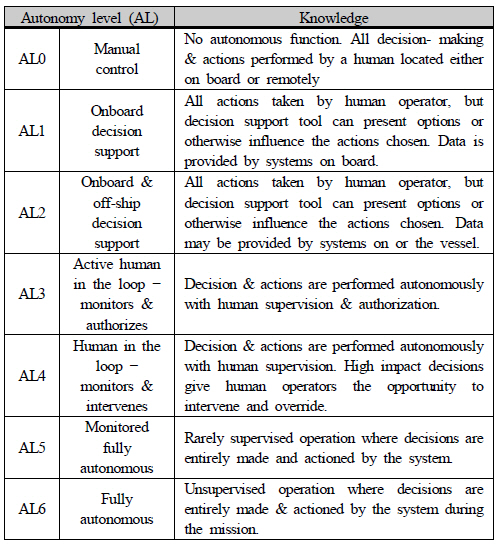
또한 Table 2는 자동화 수준별 육상 운영자의 역할을 나타 내고 있으며, 완전한 자동화가 이루어지기 전까지는 육상 운 영자의 역할이 커지게 되어, 육상 운항사 등의 신규 일자리가 창출될 것으로 예상된다(Kim, 2018)(Lloyd’s Register, 2017)
자율운항선박에 비해 자율주행 자동차와 관련해서는 차량 과 운전자 사이의 정보 상호작용(information interaction)에 대한 연구가 활발하게 진행되고 있다(Park, 2017). 즉, 자율주 행의 수준이 높아질수록 사용자는 다른 과업을 수행할 여유가 생기므로 차량 내에서 보다 다양한 과업을 수행할 것이며, 자 동화 기술이 고도화될수록 차량 내 사용자 경험은 큰 폭으로 변화하게 되므로, 자율주행 자동차를 설계할 때에 운전자의 경험을 총체적으로 고려해야 한다고 보고되고 있다.
3.2 자율운항선박 개발 및 운용과정에서 필요한 인적요인 관련 주요 이슈
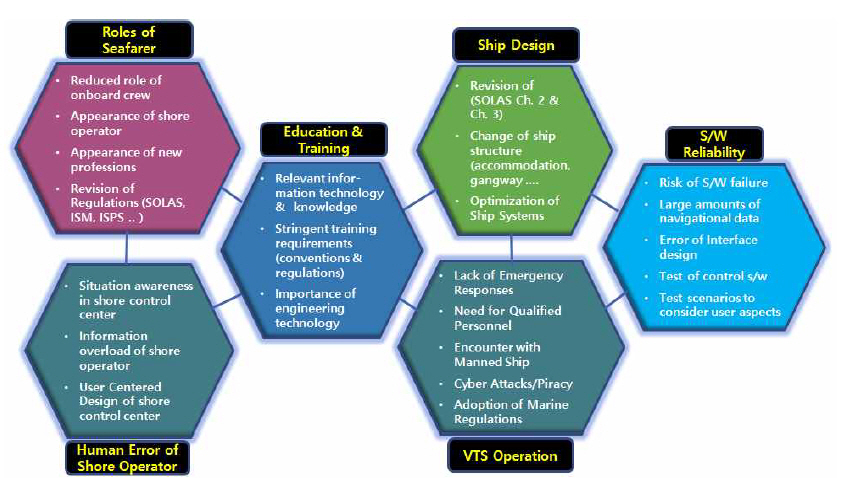
앞서와 같이 국내외 문헌조사를 통하여 자율운항선박 개발 및 운용과정에서 고려해야 할 인적요인의 주요 이슈를 Fig. 2 와 같이 6가지로 구분하였다.
1) 선원의 역할 변화
자율운항선박이 단계적 개발에 따라 해상직 선원의 역할은 줄어들 것이며, 궁극적으로는 육상에서 운항사가 선박을 관리 하고 운항하는 모습으로 바뀔 것으로 전망된다. 즉, 자율운항 의 단계적 도입으로 인하여 국내 선원의 일자리가 점진적으로 줄어들 것이 예측되나, 현재 승선하고 있는 선원의 상당수가 외국선원이기 때문에 관련 영향과 파급효과에 대해서는 섣부 른 예측이 어렵다. 또한 해상에서 모든 선박이 자율운항선박 으로 대체되기 전까지는 기존의 유인 선박이 계속 존재하므 로, 단기간에 선원들의 수가 급격하게 감소하지 않을 것으로 예측되고 있다.
전문가들은 해양 분야에서도 4차 산업혁명으로 인해 무조 건 일자리가 줄어드는 것이 아니라 부가가치가 높은 새로운 일자리가 생길 것이라는 전망도 있다. 즉 자율운항 선박의 도 입에 따라 육상 운항사와 같이 기존의 해상직 선원보다 부가 가치가 높은 신규 직업군이 생겨날 것이므로, 이에 대한 선제 적인 시장 대응이 필요하다는 것이다(Chang, 2019).
한편 선박의 자동화와 지능화의 진전에 따라, 선박의 운항 여건 및 기술적 여건이 변화하게 되므로, 이는 결과적으로 선 박 승무정원기준에 영향을 미치게 된다. 이러한 영향을 정확 하게 분석하고 예측하기 위한 연구가 필요한 시점이다.
또한 해기기술 전문 지식을 보유한 전문가들이 자율운항 선박과 관련하여 법, IT, 국가 경영과 관련된 전문가 및 공 무원 등과 같이 다양한 분야의 직업군으로 진출할 수 있을 것으로 기대된다.
다만 자율운항선박에는 선원이 승선하지 않거나 최소 인원 만 승선하게 되어, 동 SOLAS 협약 제4장 당직규정 및 제5장 제14조 선박의 최소인원배치 규정이 적용될 수 없으며, ISM Code(International Ship Management Code) 및 ISPS Code(International Ship and Port Facilities Security Code)를 현행 규정 그대도 적용하기 어려운 점이 예상된다(Choi and Lee, 2018).
2) 교육훈련의 변화
위와 같은 선원의 역할 변화에 따라 선원을 양성하고 교육 하는 기관들은 앞으로 선원들을 대상으로 기존의 항해기술보 다는 IT기술을 기반으로 하며 기존 항해기술을 보조하는 방 향으로의 교육변모가 필요하다.
영국의 플리머스 대학(Plymouth University) Autonomous Marine Systems Research Group에서는 자율운항 선박 도입 에 따른 “UK code of practice in terms of training, standards and accreditation” 11장과 관련하여, 자율운항선박 운용요원을 위한 변화와 도전, 역량과 운영 및 안전운용 계획 을 제시하였다(Hone, 2019). 한편 영국의 본사를 둔 국제해상 안전 전문 기구인 Nautical Institute에서는 자율운항 선박 도 입에 따른 SOLAS, MARPOL, STCW 등과 관련된 교육, 기 술 및 규정 등의 일반적인 정보를 업데이트하고, 과부하와 비 효율을 극복하기 위해서 선원들의 기술역량 강화와 규정준수 문화를 확산하기 위해 노력하고 있다(Lloyd, 2019).
또한 자율운항선박의 개발되고 도입됨에 따라 육상에 관제 센터를 두어 선박을 직접 운영하고 관리하게 되므로, 높은 품 질의 기술을 가진 육상 운항사들을 관리하고 양성할 수 있는 플랫폼을 구축하고 개발하는 것이 중요할 것이다.
상해해사대학의 “자율운항선박의 도입에 따른 선원의 경력 및 교육훈련 영향연구”에서는 자동제어시스템과 의사결정지 원시스템이 선박에 광범위하게 적용되면, 다음과 같이 선원의 교육훈련 개선의 필요성이 요구된다고 언급하고 있다 (Shanghai Maritime University, 2018).
이러한 교육훈련 개선의 필요성을 반영하여 자율운항선박 의 자율수준별로 Table 3과 같은 필요 지식 및 훈련 프로그램 을 제시하였다.
Table 3
Summary of knowledge classification of practitioners on marine autonomous surface vessel (Shanghai Maritime University, 2018)

|
3) 선박설계의 변화
자율운항선박은 현존선과 다른 구조적 특성을 가지게 될 것으로 현재 SOLAS 협약을 그대로 적용하기에 어려울 것이 다. 예를 들어, 자율운항선박은 자동화된 설비를 통해 운항하 게 될 것이므로, 동 협약 제2-1장 구조, 전기 및 기관설비, 제 2-2장 소화설비, 제3장 구명설비와 관련된 최소요건 규정들을 충족시킬 수 없다(Choi and Lee, 2018).
즉 자율운항선박에는 선원이 승선하지 않음으로 인한 선박 구조는 폐쇄형 구조로 변하게 될 것이며, 선원 거주구역과 통 로가 없어져, 보다 많은 공간을 화물공간으로 활용할 수 있을 것이다.
Rolls Royce(2016)의 발표 자료에 의하면 자율운항선박의 확대에 따라 선원의 고용이 줄어들고, 이에 따라 선박의 운영 비용이 40% 절감되고, 선원 주거 시설의 감소에 따른 화물 적 재량이 7%~10% 증가될 것으로 예측하였다.
또한 자율운항선박의 개발과정에서는 보다 높은 수준의 운 용 안전성 및 신뢰성이 요구되며, 반면에 배멀미(sea sickness) 관련 기준은 더 이상 필요치 않을 것이다.
기존 선박의 설계가 설계자의 경험에 의존하는 것과는 다 르게, 자율운항선박의 설계에서는 선체, 프로펠러, 기장, 전장 등 시스템 전반에 최적화 기법을 활용하여 근본적으로 새로운 설계가 가능할 것이다.
4) 소프트웨어 신뢰성
자율운항선박에는 선박의 운용을 위한 제어기, 즉 컴퓨터 시스템이 탑재되어 있으며, 특히 인간에 의해 개발된 소프트 웨어는 다수의 버그를 발생하여 자율운항선박에 치명적 위험 을 줄 가능성이 있다.
소프트웨어 개발과정에서 발생할 수 있는 인적 오류는 단 순 타이핑 오류뿐만 아니라, 인터페이스 설계 오류, 운용 알고 리듬의 비현실성 등이 있으며, 가장 치명적인 오류는 예기치 않은 상황 혹은 비정상 상황에서의 소프트웨어 설계 오류이다.
이러한 오류를 막기 위해서는 제어 소프트웨어의 테스팅이 무엇보다 중요하며, 다양한 개발자 측면뿐만 아니라 자율운항 선박의 운용에 영향을 미칠 수 있는 사용자 측면에서의 다양 한 테스트 시나리오의 개발이 필요하다.
5) 육상 운항사의 인적 오류
앞서 언급한 바와 같이 완전한 무인 자율운항선박의 전 단 계까지는 육상 운항사에 의한 원격 제어가 이루어질 것으로 예측된다. 즉, 안전하고 효율적으로 선박을 제어하기 위해서는 육상 운항사의 상황인식이 중요하며, 육상 운항사의 업무 수 행도에 영향을 미치는 정보 과부하, 자동화 시스템 의존문제, 교대 근무에 따른 피로문제, 육상센터에서 사용자 중심 설계 를 표출 정보의 질 향상 등에 대한 검토가 필요하다.
MUNIN 프로젝트에서는 육상센터의 운영팀과 관련된 인적 요인 이슈를 파악하기 위해, Fig. 3과 같은 프로토타입을 통해 육상 운항자의 의사결정을 위한 상황인식 실험을 수행하여, 보다 상황인식이 개선된 육상센터의 설계를 제안한 바 있다 (Man et al., 2015)(Man et al., 2018).
Fig. 3
Operator’s workstation and dashboard to display information of shore control center in MUNIN Project

또 동일한 해역에서 유인 선박과 무인 선박 간의 인터렉션 과정에서 발생할 수 있는 오류를 줄이기 위해서는, 사용자 중 심 설계(user‐centred design) 및 청각 피드백(auditory feedback) 등의 HMI(Human‐Machine‐Interface) 기술의 활 용이 필수적이다.
6) VTS의 역할 변화
자율운항선박의 도입에 따라 VTS(Vessel Traffic Services)의 역할도 변화할 것으로 예측된다. 즉 기존의 VTS 운영에서는 자율운항선박을 고려하지 않고 있으므로, 자율운 항선박을 안전하게 관리하기 위한 새로운 운영절차 및 기술의 적용이 필요하다.
세계해사대학에서는 VTS 운영에 있어 자율운항선박 도입 의 영향에 대해 격차분석(gap analysis)과 SWOT-AHP 분석 을 통해, 다음과 같이 자율운항선박의 약점과 위기요인으로부 터 VTS의 안전한 운영에 미치는 요인을 식별했다(Baldauf et al., 2018)
이러한 요인을 바탕으로 VTS가 유인선박과 무인선박 모두 를 안전하게 관리하기 위한 방안을 운영, 기술, 훈련 및 규정 측면에서 다음과 같이 제시하였다(Chong, 2018).
즉 자율운항선박, 육상운영자 및 유인선박과 VTS 관제사 와의 통신에 대한 가용성, 신뢰성 및 보안을 담보할 수 있는 시스템이 필요하다. 또한 자율운항선박을 관리하기 위해서 새 롭게 요구되는 VTS 운영절차 및 시스템에 대한 훈련이 필요 하다. 한편 선박 운항자와 VTS 관제사 사이의 기능적 관계는 자율운항선박에서도 유사하게 육상 운항사와 VTS 관제사 사 이에 존재하나, 비상상황에서는 자율운항선박의 제어를 육상 운항사에서 VTS 관제사에게로 이양하기 위한 규정이 새롭게 요구된다.
3.3 육상 운항사의 인적요인 분석 방안
자율운항선박 개발의 논의 과정에서 해양사고의 약 80%를 차지하는 인적 오류(human error)의 근본적 제거를 통한 안전 의 향상을 주요한 장점으로 언급하고 있다.
그러나 앞서 언급한 바와 같이 본격적인 자율운항의 시대 가 오더라도, 자율시스템의 소프트웨어 개발 과정에서 설계 및 프로그래밍 오류가 발생할 수 있으며, 여전히 모니터링, 원 격제어 및 유지보수를 위해서는 인간의 개입이 필요다 (Porathe et al., 2014).
MUNIN 프로젝트에서는 자율운항선박의 운용을 위한 육상 센터, 육상 운항사, 육상 엔지니어 및 육상 센터 상황팀의 개 념과 역할에 대해 다음과 같이 정의하고 있다(Mylly, 2019).
- 육상 센터 : 숙련된 승선 항해사와 기관사에 의해 보내진 자율운항선박을 계속적으로 모니터링하고 제어함
- 육상 운항사 : 항로계획 갱신 또는 자동시스템의 운영문 서 갱신과 같은 고수준의 명령을 통해 여러 척의 자율운항선 박의 안전운항을 동시에 모니터링하고 제어함.
- 육상 엔지니어 : 육상 운항사의 기술적 질의를 지원하고, 차기 항해를 위한 기술 시스템의 충분한 신뢰성 확보를 위한 상태 기반 유지보수 시스템(condition-based maintenance system)을 기반으로 선박에 대한 유지보수 계획을 책임짐
- 육상 센터 상황팀 : 적절한 상황인식을 위해 원격 운항 지원 시스템을 포함한 육상의 무인선박의 선교를 통해, 특정 상황에서 선박의 직접 원격제어를 인계받아 업무를 수행함.
육상 운항사는 원격지의 선박과 물리적 연결이 없으므로, 선박의 거동과 운항환경에 대한 시각 정보를 인지하기 어려 워, 다양한 인적요인 문제가 발생할 가능성이 높다.
즉, 유인선박의 운항 과정에서 요구되는 직관적 멘탈 모델 과는 다른 새로운 고수준의 상황인식을 고려한 멘탈 모델이 필요하다. 또한 선박 항해사에서 육상 운항자로의 역할 변화 에 따라 동적 상황에 대한 대량의 지속적 정보의 유입에 대한 정보 과부하 문제가 발생할 수 있다.
결국 자율운항선박이 완전하게 무인으로 운용되더라도, 육 상 운항사와 같이 인간은 중요한 역할을 하게 될 것이며, 인적 오류의 발생으로 인해 육상 운항사의 업무 수행도에 영향을 미칠 가능성 여전히 존재한다.
육상 운항사의 의사결정 및 업무수행에 영향을 미치는 요 소에 대한 식별 및 평가를 위해서는 인적 신뢰성 분석(Human Reliability Analysis;HRA)을 통한 수행도 영향인자 (Performance Influencing Factors;PIFs)로 분석되어야 한다.
일반적으로 수행도 영향인자는 인간의 작업 수행도에 영향 을 미치는 인자들을 의미하며, 인적 오류의 증가와 감소에 영 향을 미치는 요인으로써 개인의 특성 요인, 환경 요인, 조직 요인, 과업 요인 등의 인자를 의미한다. 즉, 자율운항선박을 위한 수행도 영향인자는 다른 산업 혹은 시스템(원자력, 항공, 자동차 등)이나 기존의 유인 선박과는 다른 독특한 요소를 포 함할 수 있다.
현재까지 파악된 자율운항선박의 운용에 따라 육상 운항사 의 업무 수행도에 미치는 영향인자들을 정리하면 다음과 같다 (Porathe et al., 2014)(Ramos et al, 2018).
- 육상센터에서의 상황 인식 : 선박의 실제 상황을 이해하 지 못하여 발생하는 실수
- 유인 선박과의 상호 작용에서의 오해 : VHF 통신 지연, 통신 불량, 유인 시스템과의 언어 문제, 상황 인식 부족
- 여러 선박에 대한 동시 모니터링 및 제어시의 스트레스 또는 정보 과부하
- 여러 선박에 대한 동시 모니터링시의 두 선박 사이의 이 월효과(carryover effects)로 인한 오류
- 자동화 시스템 의존에 따른 인지능력 및 항해기술 저하
- 육상 운항사의 교대 근무에 따른 수면 부족, 피로 및 장 시간 모니터링에 따른 지루함 등
- 비디오 링크와 같은 적절한 선박의 정보를 연결하기 어 려운 기상 상황
위와 같은 수행도 영향인자들 외에도 기존의 해사인간공학 의 논의과정에서 제시된 다양한 요인들의 식별 및 평가를 통 해, 자율운항선박의 운용과정에서 고려해야 하는 인적요인의 식별 및 수행도 영향인자에 대한 분석이 필요하다.
4. 결 론
일반적으로 자율시스템의 타당성과 관련하여, 사고에서의 인적오류 발생을 원천적으로 없앨 수 있다는 논리가 자주 언 급되고 있다. 그러나 인간의 의사결정을 모두 대체하는 것이 아니므로, 인적오류로 인한 위험이 제거되는 것이 아니라, 인 적오류의 대상이 선박 운항자에서 육상 운항사로 변경되어 새 로운 유형의 위험이 발생할 가능성은 여전히 존재한다.
또한 육상센터의 통제를 기반으로 한 자율운항 환경에서 해양사고의 발생 횟수가 줄어들 가능성은 있겠으나, 선원의 미승선으로 인해 발생한 사고의 수습 및 비상조치가 이루어지 않게 되면, 예기치 못한 2차 사고를 가져올 수 있다.
즉, 자율운항선박의 시대가 도래 하더라도 안전 항해를 위 해 인적요인의 고려를 위한 노력은 계속되어야 한다. 선원의 역할 변화 및 교육훈련, 소프트웨어 개발과정에서의 역할, 육 상센터의 HMI 기술의 활용 등 자율운항선박의 개발 및 운용 과정에서 중요한 고려요소로서의 인적요인에 대한 관심이 필 요하다.
자율운항선박 시대의 실현을 위한 기술개발의 핵심은 지능 화와 가상화가 될 것이며, 핵심기술로는 상황인지 및 인공지 능 판단 등 선박 자율운항 기술, 운항·관제 통합 연계기술, 군 집운항을 위한 협력조종(collaborative control)기술이 될 것으 로 예측된다.
결국 선원의 지식을 시스템화하여 육상 운항사에게 제공하 고, 자율운항선박과 육상센터 간에 원활한 인터페이스가 이루 어지도록 하는 것이 중요하다.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






