

1. 서 론
세계 각국은 자국의 안정적인 에너지 공급과 저탄소 녹색 성장을 위해 장·단기적인 정책을 다양하게 펼치고 있다. 그 중 고효율, 친환경 광원인 LED는 국가의 에너지 정책 추진의 중 요한 부분을 차지하고 있다. LED 조명은 기존 백열등·형광등· 할로겐을 대체 할뿐만 아니라 휴대전화, 자동차, BLU(Back Light Unit) 등 다양한 분야에 적용할 수 있기 때문에 시장잠 재력이 크다(Kim and Kim, 2013). 우리나라의 경우 정부 차 원에서 “저탄소 녹색성장”을 대표적인 정책의 지표로 설정하 여 현재의 환경·에너지 위기를 극복하고자 노력하고 있으며, 6대 분야 22개 산업 중 LED 산업을 21세기 신성장동력 산업 으로 육성하는 정책을 발표하였으며, 2012년 세계 3대 LED 생산국을 목표로 하고 있다.(Jung, 2009)
인간의 생체리듬과 빛의 연관성을 다루는 감성조명에 관한 보고서에 의하면, 인류는 수십만 년 동안 태양, 별, 달 등의 자 연 빛에 순응하며 진화해 왔으며 자연의 빛과 유사한 조명환 경에서 보다 능률적인 작업과 편안한 휴식이 가능하다고 한 다. 또한 이들 보고서는 다양한 조명환경에 따라 인간의 신체 및 정신이 민감하게 반응함을 지적하며 자연의 빛에 가까울수 록 인간은 편안함을 느낄 수 있음에 주목하고 있다. 따라서 미 래지향적인 조명의 궁극적인 목적은 24시간동안 변화하는 자 연 빛에 순응된 인간의 생체리듬에 맞추어 각각의 생활환경에 최적화 된 밝기와 색온도를 제공하는 것이라고 할 수 있 다.(Chang, 2007; Park, 2009; Takahashi, 2007)
본 논문에서는 기존의 외부환경요인(온도, 습도, 조도 등)에 의해 변화되는 감성조명 제어기에 Modbus 통신 프로토콜을 추가하여 외부환경요인 확인 및 원격제어를 가능하게 하고 또 한 퍼지 추론 시스템을 도입하였으며 최적제어가 가능한 제어 기를 구성하였다.
2. 이론적 고찰
본 장에서는 논문진행에 필요한 분야의 이론적 고찰을 기 술하였다. 첫 번째로 감성조명에 대한 정의와 필요성, 두 번째 로 인공지능기법중의 하나인 퍼지이론에 대한 내용과 퍼지제 어 시스템의 구성, 세 번째는 Modbus 프로토콜에 대해 논의 하였다.
2.1 감성조명
1) 감성조명의 개요
감성조명은 조명기기에서 나오는 색의 온도와 밝기를 사람 의 심리상태와 생체리듬에 알맞게 적용시키면서 공간을 변화 시킬 수 있는 조명기술을 말한다. 빛은 인류가 시작된 이래 오 늘날까지 인간의 생활에 커다란 영향을 미치는 에너지이다. 이로 인해 인간은 빛과 함께 할 때 더욱더 편안함을 느끼며 안정된 마음으로 아름다움과 행복을 추구하려는 본능을 가지 게 된다(Park, 2009; No, 2005).
2) 감성조명의 필요성
조명에서 색온도는 인간의 감성에 큰 영향을 미치는 요소 이다. 색온도란 광원의 빛을 수치적으로 표현하는 것인데, 한 물체의 색온도는 같은 색광의 절대온도로 표시된다. 통상적으 로 색온도가 높을수록 푸른빛이 나게 되며, 색온도가 높은 빛 은 시원한 느낌을 준다. 반면에 색온도가 낮을수록 붉은 색에 가까운 빛이 나게 되며 따뜻한 느낌을 준다. 이러한 색온도는 사람이 느끼는 감성에 영향을 미치는 요인이기 때문에 최근 들어 업무의 효율성을 높이거나 쇼핑장소의 구매욕을 상승시 키는데 있어서 이러한 색온도를 고려한 조명시설이 적용되고 있다(Lee, 2010).
2.2 퍼지이론
퍼지제어 이론은 보통집합의 규칙과 연산에 퍼지집합의 규 칙과 연산을 비교함으로써 전개된다. 퍼지집합은 보통집합의 정의, 규칙, 원리들 대부분을 포함하고 있다고 볼 수 있다. 사 실상 두 집합 사이에는 차이점이 거의 존재하지 않는다. 보통 집합 이론은 0 또는 1이라는 명백한 값을 가지는데 반하여 퍼 지집합 이론에서 “소속 정도(degrees of membership)”라는 무 한 지수를 가지므로 사실상 근본적으로 보통집합 이론보다 광 범위한 이론이라고 할 수 있다. 이러한 점에서 보통집합은 퍼 지집합의 한 부분이라고 할 수 있다. 그러므로 퍼지집합 이론 은 포괄적인 집합 이론이라고 할 수 있고, 개념적으로 퍼지집 합은 애매한 경계(한계)를 가지는 집합으로 정의될 수 있다 (Takahashi, 2007; Zadeh, 1978).
2.3 Modbus 프로토콜
1) Modbus 프로토콜의 개요
Modbus 프로토콜은 1979년 미국의 모디콘사에서 개발되어 오늘날까지 전 세계의 빌딩자동제어 및 공장자동화 현장에서 가장 많이 사용되고 있는 통신방식 중 하나이다. 폭 넓은 사용 자층을 확보하고 있어 프로토콜을 이기종간의 시스템에 인터 페이스 하기 위해서 가장 널리 사용되고 있으며, 그 이유는 무 엇보다 사용하기 쉽고, 자동제어에 사용되는 digital value, analog value의 데이터 형식에 제어/감시의 특징을 잘 표현하 고 있고, 구현하기 쉽기 때문이다(Seol, 2013)
간단하게 Modbus 프로토콜을 정리하면 아래와 같다.
2) Modbus 프로토콜의 통신과 장비
Modbus는 Master/Slave 기반 프로토콜이다. 시리얼 통신 에서는 Master로 설정된 장비만이 Slave로 정보를 요청할 수 있는 반면, 이더넷 통신에서는 네트워크상의 어떤 노드도 정 보를 요청할 수 있다. 요청정보는 읽기와 쓰기 모두 가능하다. 하지만, 대부분의 경우 Master는 하나만 존재한다(IT tips, 2013). 아래의 Fig. 1은 Modbus Master와 Slave간의 요청과 응답 리사이클 구조에 관해 나타낸 것이다.

3) Modbus 프로토콜의 프레임 포맷
Modbus 통신 네트워크의 종류와 요청 정보의 형식에 따라 여러 가지 프레임 포맷이 존재한다. 이것은 RS-232또는 RS-485를 사용하는 Serial과 Ethernet을 사용하는 TCP로 나 누어지진다. Modbus Serial은 ASCII와 RTU(Remote Terminal Unit)의 두 가지 전송 프레임 포맷을 가지고 있으며 Network에서는 같은 프레임 포맷를 사용해야 한다. ASCII 모 드는 문제가 발생했을 때 보기가 편하며High Level Language로 프로그램 된 Master PC에 적당하며 RTU 모드 는 기계어로 프로그램 된Master PC에 적당하다(Won and Kim, 2011). 본 연구에 사용된 포맷은 Modbus RTU 이다.
4) Modbus 프로토콜의 프레임 포맷
Modbus 평션코드는 레지스터나 코일(Coil)에 값을 쓰거나 읽는 명령들이다. Modbus에서는 4 가지 기억장소를 가지고 Command를 수행하게 된다. 정리하면 Table 1과 같은 영역으 로 구분되어 진다(Comfile Technology, 2015).
Table 1
Modbus Function Code and Memory Location
본 연구에는 Holding Resister인 3번과 6번의 코드를 이용 하어 제어기를 구현하였다.
3. Modbus LED 감성조명 제어기의 구성 및 설계
3.1 퍼지 시스템의 구성
1) 퍼지 언어변수 및 멤버쉽 함수의 설정
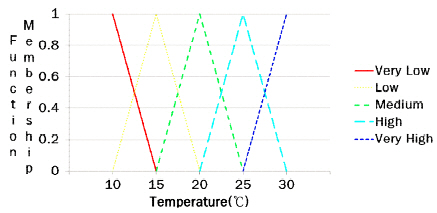
첫 번째로 온도 값의 범위를 매우 추움(VLT), 추움(LT), 따뜻함(MT), 더움(HT), 매우 더움(VHT)의 5부분으로 나누어 퍼지멤버쉽 함수를 할당하였다. 퍼지멤버쉽 함수의 범위는 아 래 Fig. 2와 같다.
두 번째로 습도 값의 범위를 매우건조(VLH), 건조(LH), 보 통(MH), 습함(HH), 매우습함(VHH)의 5부분으로 나누어 퍼 지멤버쉽 함수를 할당하였다. 퍼지멤버쉽 함수의 범위는 다음 의 Fig. 3과 같다.

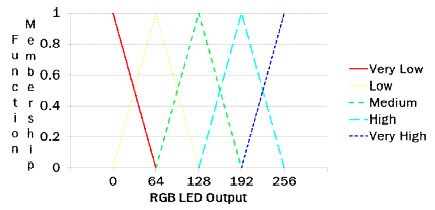
세 번째로 LED 출력에 관한 언어변수 설정에 따라 LED 출력 값의 범위를 최저(VLO), 적음(LO), 보통(MO), 많음 (HO), 최대(VHO)의 5부분으로 나누어 퍼지멤버쉽 함수를 할 당하였다. 퍼지멤버쉽 함수의 범위는 다음의 Fig. 4와 같다.
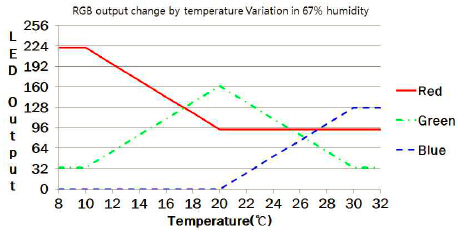
위의 LED 출력 퍼지멤버쉽 함수를 바탕으로 온도입력과 습도 입력에 따른 RGB LED 출력범위를 추가하여 온도, 습도 변화에 따른 일관적인 출력을 낼 수 있도록 유도하였다. 아래 의 Fig. 5, 6은 온도, 습도입력에 따른 RGB LED 출력 범위이 다.

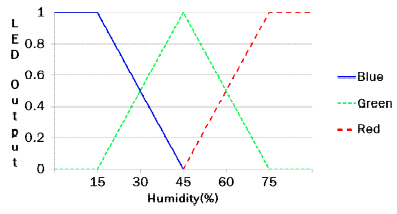
Red, Green, Blue의 LED에 위의 함수 퍼지멤버쉽을 출력 시 3가지 색이 섞이게 된다. 그리고 멤버쉽의 경계구간에서의 애매모호 한 색이 나올 수 있다. 그리고 위의 RGB LED출력 범위를 바탕으로 13가지 항목으로 나누어 대략적인 출력 색상 을 예상할 수 있으며 색상은 Red, Yellow, Green, Cyan, Blue, Magenta, Hot Pink, Orange, Lawn Green, Spring Green, Sky Blue, Blue Violet, Forest Green이다.
2) 퍼지 제어 규칙(Fuzzy Control Rules)의 설정
위의 퍼지멤버쉽 함수를 바탕으로 아래의 Table 2와 같이 Fuzzy Rule Lookup Table을 구성하였다.

앞에서 설명한 Table 2의 Fuzzy Rule Lookup Table을 If-Then 규칙으로 변환하여 Fuzzy Rule을 아래의 25가지 항 목으로 나누어 정의하였다.
- R1 : If 온도 = 매우추움 and 습도 = 매우건조 then Color = Magenta
- R2 : If 온도 = 매우추움 and 습도 = 건조 then Color = Hot Pink
- R3 : If 온도 = 매우추움 and 습도 = 보통 then Color = Yellow
·
·
·
- R23 : If 온도 = 매우더움 and 습도 = 보통 then Color = Cyan
- R24 : If 온도= 매우더움and 습도= 습함 then Color = Blue Violet
- R25 : If 온도 = 매우더움 and 습도 = 매우습함 then Color = Magenta
예를 들어 온도가 매우 덥고 습도가 매우 습한 경우 LED 색상은 Magenta(분홍)색이 켜지게 되나, 매우 덥고 매우 습하 다는 명제(조건)에 얼마나 일치, 즉 소속도의 값이 얼마나 확 률의 값 1에 수렴하는가에 따라 기존의 분홍색에서 미세하게 색상이 변화하게 된다(Lee, 2010).
3) 비퍼지화(Defuzzification) 과정
앞장에서 계산한 퍼지화 된 수치는 직접 출력(LED Display)으로 사용할 수 없다. 그러므로 실제로 시스템에서 사 용 가능한 수치로 변환하기 위해 비퍼지화 과정을 거쳐야 한 다. 비퍼지화 과정에는 주로 아래의 (식 1)과 같이 무게중심법 (Center of gravity)으로 계산하는 경우가 대부분이다.
규칙 Ri 의 온도 조건을 Ai, 습도 조건을 Bi, Color를 Ci 라 하고, 조건 A, B에 대한 센서의 측정값을 a, b라고 할 때, 무 게중심법을 이용하여 비퍼지화 과정을 거치게 된다. 그 결과 C는 실제 시스템을 동작시키는 값이 된다.
3.2 제어기의 동작 Flow Chart
본 제어기설계의 Local모드 및 Remote(Modbus 통신) 모드 및 전반적인 동작의 System설계를 Flow Chart로 나타내었으 며 Flow Chart는 Fig. 7과 같다.

위의 Flow Chart와 같이 Modbus통신을 통하여 Local 뿐만 아니라 Remote에서 제어기의 On/Off 및 모드 변경이 가능하 며 Manual모드로 동작 시 LED 출력을 임의로 조정이 가능하 게 설계되어 있다.
4. Modbus LED 감성조명 제어기의 구현
4.1 제어기의 하드웨어 구성
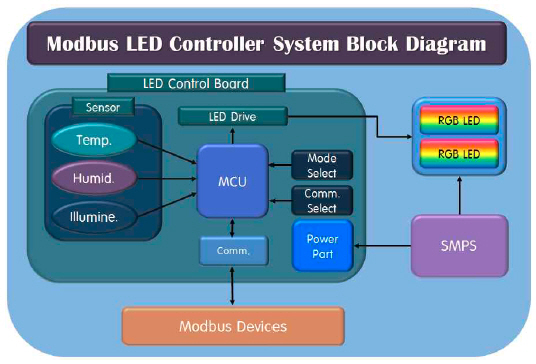
제어보드의 하드웨어구성은 입력변수인 온도, 습도, 조도의 입력을 받는 센서부와 이를 처리하여 퍼지연산을 수행하는 MCU부, 퍼지연산 결과 값의 출력을 표현하기위한 LED 제어 부, Modbus Devices들과 통신을 할 수 있게 하는 통신부, 각 종 통신 및 모드 설정을 할 수 있는 설정부, LED 모듈 및 제 어기에 전원을 공급할 수 있게 변환을 해주는 SMPS, 12VDC 의 전원을 5VDC로 변환 해주는 전원부로 구성이 되어있다.
아래의 Fig. 8은 제어기의 System Block Diagram이다.
4.2 각 부의 구조와 기능
1) MCU 및 모드 & 통신 설정부
본 연구의 MCU는 컴파일 테크놀로지 주식회사의 8Bit 프 로세서인 CUBLOC CB280모델을 사용하였다. 이 프로세서는 베이직 언어 및 레더로직을 지원하여 시퀀스(Sequence)제어 가 가능한 특징을 가지고 있으며 기본적인 내부 프로세서는 아트멜(ATmel)사의 ATmega128을 이용한 제품이다.
MCU는 온도, 습도, 조도 센서에서 들어오는 전압을 ADC 를 통해 10Bit 디지털로 변환을 하며 퍼지연산 프로세싱 및 결과 값을 PWM 출력으로 만들어내어 RGB LED 모듈의 각 색상들 즉 Red, Green, Blue의 비율을 조절한다. 그리고 MCU 자체에서 Modbus RTU 프로토콜을 지원하기 때문에 쉬운 프 로그래밍이 가능하였으며 1개의 Serial Port를 이용해 Modbus 통신이 가능하도록 설정 및 15Point Input을 Dip S/W에 연결하여 모드&통신 설정을 가능하도록 하였다.
2) LED 제어부
MCU의 출력 값을 실제적인 색상으로 내주는 LED 모듈은 RGB LED 3구 모듈을 사용하였다. MCU에서 나오는 값은 실 제적으로 모듈을 구동시키지는 못한다. 모듈의 구동전압은 12VDC로 전원부인 SMPS부에서 공급을 한다. MCU에서 나 오는 값은 5VDC로 이 값을 증폭을 위해서 파워MOSFET의 Gate단으로 연결되어 실질적으로 모듈을 on-off시키는 기능 을 한다. 즉, FET는 스위치의 기능을 하는 것으로 게이트단의 신호에 따라 모듈에 전원을 인가하여 색상을 나타내게 된다.
3) 센서부
온도센서는 Texas Instruments사(이하 TI사)의 LMT88 소 자를 이용하였으며 이 소자는 -55℃부터 130℃까지 측정이 가 능하며 구동전압은 2.4VDC부터 5.5VDC 까지 사용이 가능하 다.
습도센서는 Honeywell사의 HIH-4000-001 를 이용하였으 며 이 소자는 0%부터 100%까지 측정이 가능하며 구동전압은 4VDC부터 5.8VDC 까지 사용이 가능하다.
조도센서는 TAOS사의 TSL250RD를 이용하였으며 이 소 자는 0.1uW/㎠부터 31uW/㎠까지 측정이 가능하며 1uW/㎠를 Lux로 변환시 6.83Lux가 되며 구동전압은 2.7VDC부터 5.5VDC 까지 사용이 가능하다.
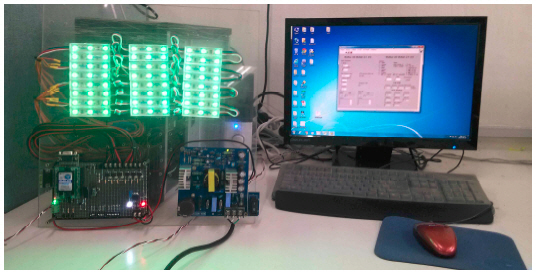
4.3 실험 및 결과
SMPS는 100W급으로 설치하였으며 온·습도계와 센서의 값을 비교하여 실제 온·습도계와 센서의 값이 일치하는지 확 인하였다. 그리고 드라이기와 분무기를 통해 온도와 습도에 변화를 주어 센서에 들어오는 값들이 실제 퍼지연산으로 LED 모듈로 출력이 되는지를 확인하였으며 조도 값은 조도센서에 검정색 테이프를 붙였다 때면서 LED모듈의 켜짐과 꺼짐을 관 찰하였다. Modbus Test는 NI사 Labview의 Modbus Library 1.2.1을 활용해 테스트 프로그램을 제작하여 온도, 습도, 조도, 모듈상태 등을 모니터링 할 수 있게 하였으며 이 프로그램으 로 모듈을 원격 동작할 수 있도록 하였다. 그리고 PC에 라이 트컴사의 USB to RS485/422 컨버터를 연결하여 PC와 모듈간 의 통신이 가능하도록 구성하였다.
온·습도 변화는 MCU 내부 프로그램의 온도 및 습도 센서 입력 값을 Modbus 통신의 주소40010과 40011번지에 각각 온도 습도 값을 임의로 조정할 수 있도록 프로그램을 수정한 뒤 Modscan32이라는 Modbus Test 프로그램을 이용하여 주 소40010과 40011번지에 각각임의의 온도, 습도 값을 입력해 LED모듈로 출력되는 색을 확인하였다.

5. Modbus LED 감성조명 제어기의 선박 적용
Modbus는 선박에서 이기종간의 통신을 위해 널리 사용되 는 Fieldbus로 이 프로토콜을 이용하여 선박의 Bridge에서 원격으로 LED조명 컨트롤러를 연결하여 모니터링 및 컨트 롤이 가능하기 때문에 쉽게 LED조명 제어가 가능하여 선박 에 적용 가능할 것으로 사료되며 선박내의 라운지, 선실 등 은 사람이 거주하기 때문에 선실내의 사람의 심리상태와 생 체리듬에 따라 색의 온도와 밝기를 알맞게 적용시켜 공간을 변화 시킬 수 있고 또한 선박 외부의 조명역시 Modbus 통 신 프로토콜을 이용하여 선박의 Bridge와 원격으로 연결 할 수 있고 모니터링 및 제어할 수 있는 조명 제어기로서 여러 고급여객선과 선박의 선실에 응용할 수 있는 제어기로 사료 된다. 아래의 Fig. 12는 선박에서의 LED 제어기 적용 예를 나타낸 것이다.

6. 결 론
본 논문에서는 외부환경 가운데 온도, 습도, 조도의 상태 에 따라 색상이 자연스럽게 변화하도록 퍼지 알고리즘을 이 용하여 감성조명용 Full-color LED 제어기에 자발적 산업표 준 프로토콜인 Modbus통신기능을 추가하여 온도, 습도 및 조도의 모니터링 및 컨트롤을 가능하게 제어기를 설계 및 제 작하였다. 실험을 통해 멤버쉽 함수와 함수 사이의 온도, 습 도 입력 값에 대한 최적 색을 LED를 통해 확인할 수 있었 으며 Modbus를 통해 LED 출력 값을 수치로 원격 모니터링 을 할 수 있으므로 출력 값이 리니어함을 확인할 수 있었다. 그리고 Modbus의 Write 기능을 통해 온도, 습도 값을 시뮬 레이션 할 수 있어 쉽게 결과 값을 도출할 수 있었다.그러므 로 Modbus통신을 이용하는 장비들과 쉽게 연결 및 컨트롤 이 가능하여 빌딩, 선박, 기차, 비행기 등의 조명이 필요한 전반으로 활용 범위를 넓힐 수 있을 것이다. 그리고 감성조 명 제어는 단순히 색상이 바뀌는 것만 아니라 색체를 이용한 심리이론과 결합하여 장소 및 주변 환경 상태에 따른 인간의 심리상태를 보완해줄 수 있는 색으로 조명을 제어한다면 더 나은 감성조명이 될 수 있을 것으로 사료된다.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






