Loran H-field 안테나의 지향성 보상 기법 연구
Study on Compensation Method of Anisotropic H-field Antenna
Article information
Abstract
위성항법시스템의 안정적인 항법정보 제공에 대한 요구사항은 점차 증가하고 있지만, 의도적인 전파교란 및 자연환경 변화에 의한 성능 저하는 현실적으로 완벽히 해결하기 어렵다. 이러한 위성항법 시스템의 단점을 보완하기 위한 대표적인 항법시스템으로 고출력 신호를 이용한 지상파항법시스템인 eLoran이 주목받고 있고, 의도적인 전파교란에 강인하다는 장점이 있다. 사용자는 eLoran 시스템에서 사용 환경 에 따라 E-field 또는 H-field 수신 안테나 중에서 적합한 것을 사용한다. 안정적인 접지 연결에 대한 제약이 없고, 상대적으로 주변 전자장비 의 잡음에 강인한 H-field 안테나는 두 개의 루프로 구성되어 루프 간의 위상과 이득차이로 인해 등방성을 가지지 못한다. 그러므로 H-field 안테나는 정지위치에서도 수신한 신호의 방향에 따라 측정치의 변화가 발생하는 단점이 있고, 보다 정확한 측위 결과를 위해서는 신호의 방 향에 따른 오차를 제거해야한다. 본 논문에서는 H-field 안테나와 송신국간의 기하학적 방향에 따른 오차를 제거하기 위한 지향성 보상기법 을 제안하였다. eLoran 모의 신호생성기를 활용하여 오차를 분석하고 모델링하여 보상하는 기법을 개발하였고, 시뮬레이션과 차량실험을 통 해 제안한 기법의 성능을 검증하였다.
Trans Abstract
Although the needs for providing resilient PNT information are increasing, threats due to the intentional RFI or space weather change are challenging to resolve. eLoran, which is a terrestrial navigation system that use a high-power signal is considered as a best back-up navigation system. Depending on the user’s environment in the eLoran system, the user may use one of E-field or H-field antennas. H-field antenna, which has no restriction on setting stable ground and is relatively resistant to noise of general electronic equipment, is composed of two loops, and shows anisotropic gain pattern due to the different measurement at the two loops. Therefore, the H-field antenna’s phase estimation value of signal varies depending on its direction even at the static environment. The error due to the direction of the signal should be eliminated if the user want to estimate the own position more precisely. In this paper, a method to compensate the error according to the geometric distribution between the H-field antenna and the transmitting station is proposed. A model was developed to compensate the directional error of H-field antenna based on the signal generated from the eLoran signal simulator. The model is then used to the survey measurement performed in the land area and verify its performance.
1. 서 론
현대사회에서 Positioning, Navigation, Timing (PNT) 정보 에 대한 의존도가 커져가면서, 항법시스템에서 안정적인 PNT 정보를 제공하는 것이 매우 중요해졌다. 항법시스템으로 주로 사용되는 위성항법시스템은 신호 세기가 미약한 위성 신호를 이용하기 때문에, 도심지역에서는 사용이 제한적일 수 있고, 간단한 교란장치를 이용해서도 사용이 어려울 수 있다(Nunes et al., 2016; Wildemeersch et al, 2014; Lee et al., 2017). 또한 우주의 자연환경에 의해서도 그 성능이 저하되기도 한다 (Seo et al., 2011; Seo et al., 2014).
이런 단점을 보완하기 위하여 지상의 송신탑에서 송출되 는 신호를 이용해 위치를 계산하는 지상파항법시스템이 주목 받고 있다. 대표적인 지상파항법시스템인 eLoran 시스템은 100 kHz의 고출력 신호를 사용하기 때문에 의도적인 전파교 란이 어렵다는 장점이 있다. 최근 2013년 영국에서는 eLoran 시스템의 시범운영을 성공적으로 마쳤으며 약 10m 이내의 측 위성능을 제공할 수 있음을 보였다(Offermans et al., 2015). 현재 한국에서도 2020년 시범운영서비스를 목표로 20m의 측 위 정확도를 제공할 수 있는 eLoran 테스트베드를 연구 중이 며(Son et al., 2018a), Son(2018b)은 기존의 동북아시아 송신 국들을 이용해 15m의 측위정확도를 제공할 수 있음을 확인하 였다.
eLoran 시스템에서는 항법 요구 성능 또는 사용자의 수신 환경에 따라 두 가지 종류의 수신 안테나를 선택하여 사용한 다. E-field 안테나의 경우 기본적인 성능이 H-field 안테나 보다 우수하지만, 접지를 안정적으로 연결하기 어렵고, 주변 전자기기의 잡음에 쉽게 영향을 받는 단점이 있다. H-field 안 테나의 경우 접지가 필요 없으면서 상대적으로 주변 전자장비 의 잡음에 강인하다는 장점이 있지만 두 개의 루프 안테나를 사용하기 때문에 신호 수신 방향에 따른 오차가 추가적으로 발생할 수 있다(Willigen et al, 2008).
H-field 안테나는 두 개의 루프로 구성되어 있다. Hartnett(2013)은 신호 시간지연과 신호 수신방향에 따라 발 생하는 위상지연으로 발생하는 오차요소를 시뮬레이션을 통 하여 확인하였다. 그 결과 H-field 안테나를 이용하여 신호를 수신할 경우, 안테나와 수신 신호의 방향에 따라 두 루프의 위 상지연으로 인한 오차가 발생함을 확인하였다. RTCM SC-127에서는 E-field 안테나를 사용한 경우 동적환경에서 약 10m 이내의 측위 오차를 갖지만, H-field 안테나를 사용한 경우에는 약 20m 까지 측위 오차 발생을 확인하였다 (Peterson et al, 2008). 그러므로 20m 이내의 목표성능을 위해 서는 H-field 특성에 따른 오차를 수신기에서 제거하는 것이 필요하다.
본 논문에서는 H-field 안테나의 방향과 수신 신호 방향에 따른 측위 오차를 제거하기 위하여 지향성 오차를 모델링하여 보상하는 기법을 제안하였다. 2절에서는 H-field 안테나의 방 향 특성과 지향성 오차를 설명하였고, eLoran 모의 신호 생성 기를 활용하여 수신 신호와 안테나 방향 간의 오차 모델링을 통한 보상기법을 제안하였다. 그리고 3절에서는 생성된 오차 모델을 실제 차량 실험을 통해 적용 및 검증결과를 제시하였 다. 마지막으로 4절에서는 본 논문의 결과를 고찰하고 향후 연구과제에 대하여 설명하였다.
2. 시뮬레이션 기반 지향성 오차 모델링
2.1 H-field 안테나의 지향성 오차
H-field 안테나는 이론적으로 Fig. 1과 같이 두 개의 루프 가 직교로 구성되어 있다. Fig. 1의 붉은 실선 원과 파란 점선 원은 루프의 이득을 나타내며, 이론적으로 두 개의 루프의 조 합으로 안테나 중심으로부터 원형의 등방성을 가진다. 그러나 실제 환경에서는 루프간의 위상과 이득차이로 원형의 등방성 을 가지지 못한다(Willigen et al, 2008). 그러므로 H-field 안 테나를 사용하기 위해서는 수신한 신호의 방향에 따라 측정치 의 변화가 발생하는 오차를 제거해야 한다.
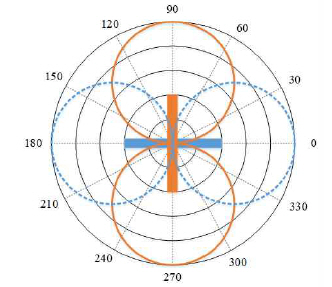
The gain pattern of the H-field loop antenna
실제 Loran 측정치 Time Of Arrival(TOA)는 식 (1)과 같 이 나타낼 수 있다(Hartnett et al, 2003).
여기서, ρ는 송신국과 수신기 간의 거리, Primary Factor(PF) 는 대기에서의 신호 전달지연 오차, Secondary Factor(SF)는 해수면을 지날 때의 신호 전달 지연오차를 나타내며, 미리 알 려진 Brunavs equation을 통하여 추정한다. 그리고 Additional Secondary Factor(ASF)는 지표면을 지날 때의 신호 전달 지 연오차로 모델링을 통하여 계산 혹은 실제 측정한 TOA에서 실제 송신국과 수신기 간의 거리, PF, SF를 제거한 값을 이용 하여 제거한다. 신호 잡음은 δ로 표시하였다. 여기서 ASF는 크게 공간적인 영역에서 발생하는 오차인 ASFS , 시간에 따라 발생하는 오차인 ASFT , H-field 안테나의 특성으로 인하여 발생하는 오차인 ASFD로 나눌 수 있으며, 이는 식 (2)와 같이 루프 안테나 시간 지연으로 인한 Hτ와 루프 위상 지연으로 인한 지향성 오차 Hθ로 나타낼 수 있다.
본 논문에서는 식 (2)에서 위상지연으로 인한 지향성 오차 인 Hθ를 식 (3)과 같이 모델링 하였다.
여기서, A는 진폭을 나타내며, θ는 송신국과 안테나간의 각을 나타낸다. 이 파라미터는 송신국 별로 모델링하여 결정한다.
2.2 시뮬레이션 기반 지향성 오차 모델링
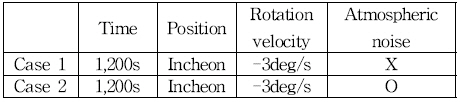
수신한 신호 방향에 따라 측정치의 변화가 발생하는 H-field 안테나의 지향성 오차를 보상하기 위하여, Fig. 2와 같이 시뮬레이션 기반 지향성 분석 실험을 구성하였다. 시뮬 레이션 실험은 Alion사의 eLoran 신호 생성 시뮬레이터인 GelSim과 UrsaNav사의 eLoran 수신기인 UN-152B를 이용하 였으며, eLoran 시스템의 테스트 베드 지역인 인천에서 7430 과 9930체인 신호를 수신하도록 설정하였다. 신호 수신 방향 에 따른 지향성 오차를 모델링하기 위하여 고정 위치에서 Table 1과 같은 조건으로 실험을 수행하였다.
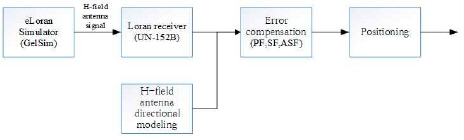
Simulation configuration

The parameter settings for the H-field antenna’s directional characteristics
Table 1은 안테나 회전에 따른 Loran 체인별 ASF 변화 모 델링을 위한 시나리오로, ASF 오차를 생성하기 위하여 대기 잡음을 반영하였다. Case 1은 지향성 오차 모델링을 위하여 대기잡음을 추가하지 않은 신호로 생성하였다. Case 2는 Case 1에서 모델링한 값을 기반으로 실신호와 유사한 대기 잡음을 추가하여 결과를 확인하였다.
실험에 이용한 Loran 신호는 9930 체인의 M(포항), W(광 주)와 7430 체인의 M(룽청), X(쉬안청), Y(허룽) 이다. 이는 인천에서 실제로 수신되는 Loran 신호 중에서 유효한 신호대 잡음비 값을 갖는다. 시뮬레이션 결과 Case 1의 회전 시나리 오에서 각 Loran 신호의 ASF는 Fig. 3과 같으며, 안테나 회전 에 따라 오차가 발생하는 것을 확인할 수 있다. 회전에 의한 오차는 송신국에 따라 최소 10.2ns(3.06m)에서 최대 17.8ns(5.33m)까지 발생하는 것을 확인하였다.
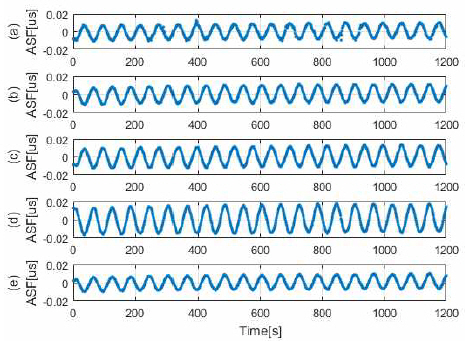
TOA-based Loran ASF of Case 1 (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
본 논문에서는 루프 위상 지연으로 인한 지향성 오차특성 을 모델링하기 위하여 Fig. 4와 같이 Case 1의 TOA 기반 Loran 신호의 ASF값을 방향각에 따라 분석하였다. 방향각에 따른 ASF는 식 (3)과 같이 정현파 형태를 확인할 수 있으며, 이를 기반으로 각 송신국 신호에서 정현파의 진폭와 위상을 추정하여 모델링하였다. 모델링을 적용한 결과 Fig. 5와 같이 회전에 의한 ASF 오차가 제거 되었으며, ASF 오차는 최소 3.3ns(0.9m)에서 최대 9.8ns(2.94m)로 감소하였다.
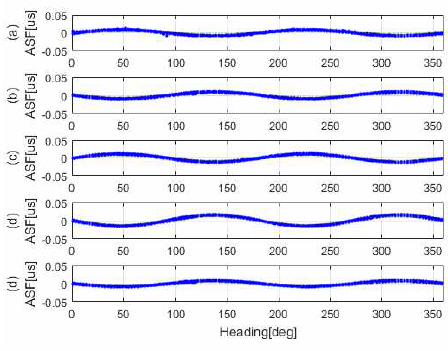
TOA-based Loran ASF sorted by H-field antenna’s heading (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
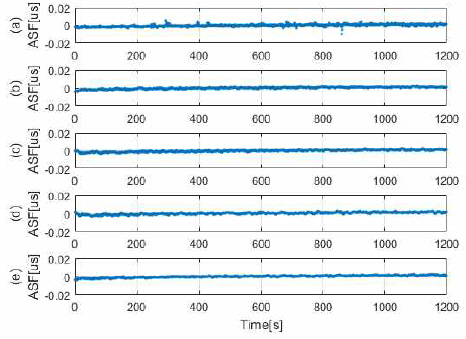
TOA-based Loran ASF of Case 1 with corrected estimated directional ASF of H-field antenna (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
Case 2는 사용자의 실제 신호 수신환경과 유사한 대기잡음 을 고려하여 시뮬레이션 환경을 설정하였다. Fig. 6과 7은 모 델링 적용 전과 후의 ASF 오차로, 지향성 오차 모델링을 적 용하지 않았을 경우 최소 17.4ns(5.22m)에서 최대 33.1ns(9.92m) 오차가 발생하였으며, 지향성 오차 모델링을 적 용한 ASF 결과는 최소 10.7ns(3.21m)에서 최대 19.9ns(5.96m) 오차가 발생하여, 적용하지 않았을 때보다 2∼4m 가량의 오 차가 감소하였고 회전으로 인한 대부분의 오차가 제거된 것을 확인하였다. 그러나 9930M과 7430X의 경우 제거되지 못한 오 차가 남아있는 것을 확인하였다. Fig. 8은 Case 2의 안테나 방 향각에 따른 ASF와 Case 1에서 모델링한 값을 나타낸 것으 로 (a),(d)의 경우 모델링 값 이외에 신호잡음으로 인한 오차 가 큰 것을 확인할 수 있다. 그러나 본 논문에서는 이러한 환 경에 영향으로 발생하는 지향성 오차는 고려하지 않고 안테나 자체의 지향성 오차만을 고려하여 Case 1과 같이 모델링하였 으며, 이는 유의미한 성능향상을 확인할 수 있다.
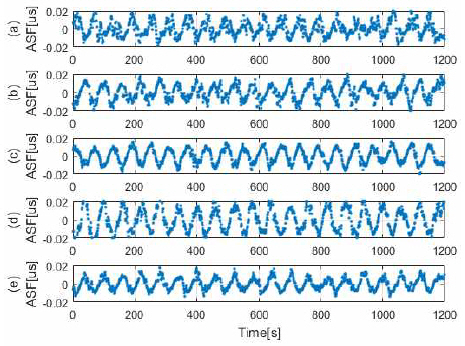
TOA-based Loran ASF of Case 2 (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
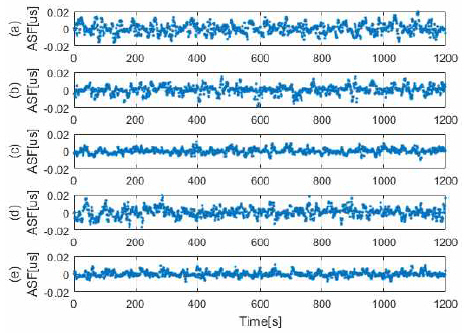
TOA-based Loran ASF of Case 2 with corrected directional ASF modeling (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
TOA-based Loran ASF over heading(blue) and the directional ASF modeling(red) (a) 9930M (b) 9930W (c) 7430M (d) 7430X (e) 7430Y
3. 차량 기반 실신호 지향성 오차 실험
제안한 지향성 오차 모델링을 검증하기 위하여, Photo 1과 같이 실험 장비를 설치하여 2019년 1월 17일 인천에서 실신호 기반 차량실험을 수행하였다. Loran 신호 수집을 위한 UrsaNav 사의 eLoran 안테나 및 수신기, 정밀 방향을 위한 Hemisphere 사의 GPS 안테나 및 수신기, 정밀위치를 위한 Topcon 사의 VRS 장비를 사용하였다. 본 실험은 주변에 큰 건물이 없는 공터에서 Fig. 9와 같이 시계방향으로 20바퀴를 회전하였다.

Experimental setup for field test
The trajectory of the field test using ground vehicle
3.1 TDOA 기반 지향성 오차 제거
현재 9930과 7430 체인의 Loran 신호는 시각동기가 되어 있지 않아, 실제적인 TOA를 계산할 수 없다. 그러므로 기존 Loran 신호의 Time Difference Of Arrival(TDOA) 기반의 측 정치를 이용한 연구 방법을 참고하여 본 논문에서 활용하였다 (Son et al., 2018c; Son et al., 2018d).
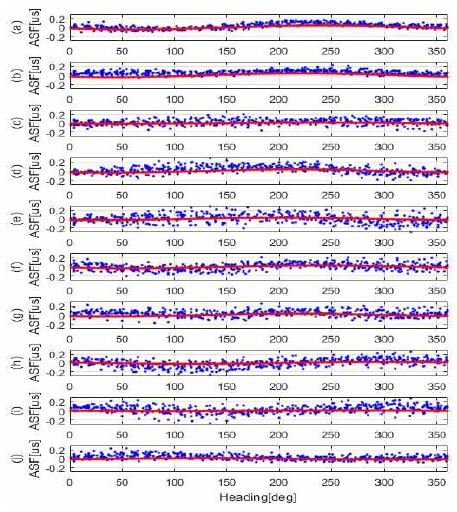
Fig. 10은 Loran 7430M, 7430X, 7430Y, 9930M, 9930W 신 호의 TDOA 기반 ASF를 나타내었다. 안테나 회전에 따른 ASF 오차를 확인하기 위하여, 실시간 정밀 측위로부터 획득 한 위치로 송신국과 수신기 간의 거리를 계산하여 제거하고, PF, SF, 공간적 오차 ASFS , 시간적 오차 ASFT를 제거한 결 과로 차량 회전에 따라 오차가 발생함을 확인할 수 있다. 이 때 안테나 회전으로 발생한 ASF 오차의 표준편차는 최소 36.7ns(10.98m)에서 최대 57.7ns(17.29m)까지 발생하였다.
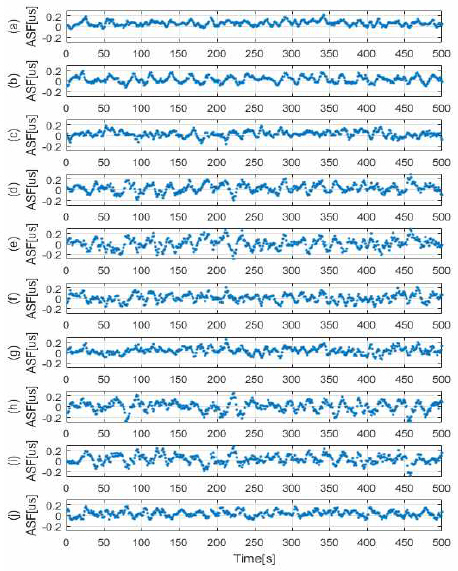
TDOA-based Loran ASF of field test
(a)7430M-9930M (b)7430M-9930W (c)7430M-7430X (d)7430M-7430Y (e)7430X-7430Y (f)7430X-9930M (g)7430X-9930W (h)7430Y-9930M (i)7430Y-9930W (j)9930M-9930W
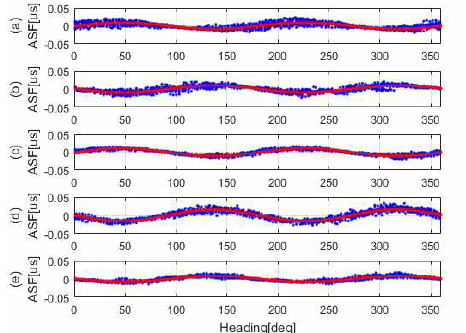
Fig. 11은 차량 실험에서 안테나 방향각에 따른 ASF와 제 안한 지향성 오차 모델링 ASF로 서로 유사함을 확인 할 수 있다. 그러나 신호에 따라 지향성 오차 모델링만으로 제거되 지 않는 경우도 있기 때문에 이에 대한 추가적인 연구가 필요 하다.
TDOA-based Loran ASF sorted by H-field
antenna’s heading(blue) and directional ASF(red) (a)7430M-9930M (b)7430M-9930W (c)7430M-7430X (d)7430M-7430Y (e)7430X-7430Y (f)7430X-9930M (g)7430X-9930W (h)7430Y-9930M (i)7430Y-9930W (j)9930M-9930W
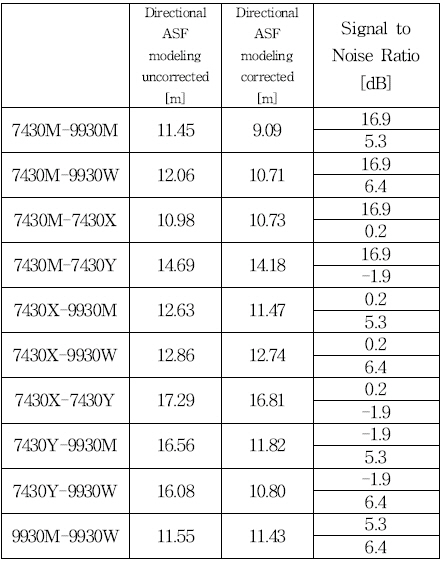
Fig. 12는 지향성 오차 모델링을 적용한 결과로 구체적인 값은 Table 2에 나타내었다. 특히 (a)7430M-9930M, (b)7430M-9930W, (h)7430Y- 9930M, (i)7430Y-9930W의 경 우 크게 ASF의 오차가 감소하였으며, 두 신호의 신호대잡음 비가 양호할 경우 표준편차 값이 약 10m 이내로 수렴하는 것 을 확인할 수 있다.
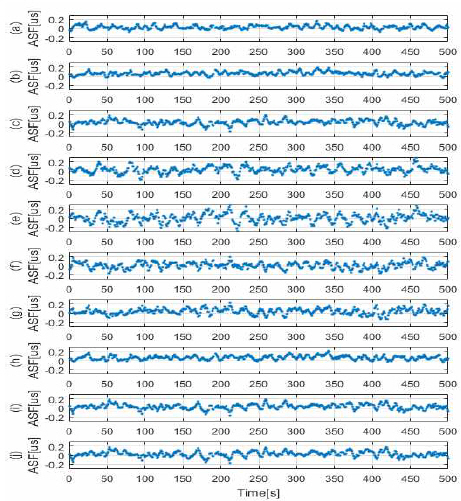
TDOA-based Loran ASF of field test with corrected directional ASF modeling
(a)7430M-9930M (b)7430M-9930W (c)7430M-7430X (d)7430M-7430Y (e)7430X-7430Y (f)7430X-9930M (g)7430X-9930W (h)7430Y-9930M (i)7430Y-9930W (j)9930M-9930W

Improvement of TDOA-based directional ASF correction
3.2 TDOA 기반 측위 성능
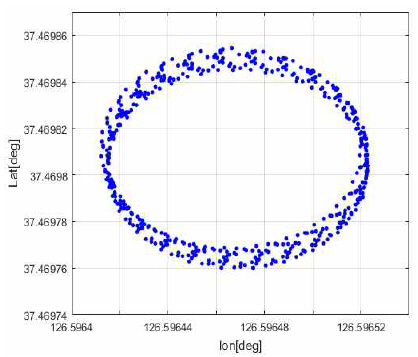
Fig. 12와 Table 2와 같이 제안한 모델링을 적용하였을 때, TDOA 기반 ASF 측정치의 정밀도가 향상됨을 확인하였고, 이를 이용하여 TDOA 기반의 측위성능을 확인하였다.
Fig. 13에서 파란색 원은 지향성 오차를 제거하지 않은 측 정치를 이용한 TDOA 기반의 측위 오차이고, 빨간색 원은 지 향성 오차를 제거한 측정치를 이용한 TDOA 기반의 측위 오 차이다. 95%의 측위 정확도를 기준으로, 30.25m에서 27.17m 로 약 10% 가량 측위 성능이 향상되는 것을 확인하였다.
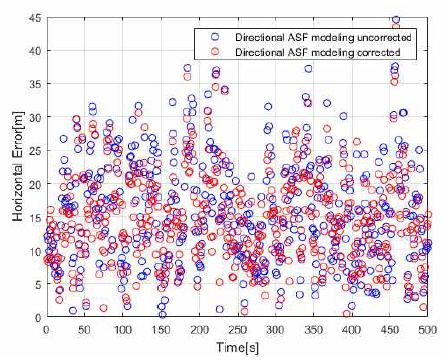
The horizontal error of TDOA-based Positioning with directional ASF correction(red) and without directional ASF correction(blue)
4. 결 론
본 논문에서는 Loran H-field 안테나를 사용하였을 때 발생 할 수 있는 지향성 오차에 대하여 모델링하고, 그 성능을 시뮬 레이션과 실신호 수신환경에서 검증하였다. 안테나의 방향을 회전시켜가며 eLoran 신호를 수신하도록 시뮬레이션 환경을 구성하고, 이를 이용하여 방향에 따른 ASF 변화를 모델링하 였다. 제안한 모델링에 대한 성능을 검증하기 위하여 eLoran 테스트 베드 지역인 인천항 인근에서 Loran-C 신호를 수집하 였고, TDOA 기반으로 신호의 표준편차 및 측위성능을 비교 하였다. 그 결과 제안한 모델링을 적용하였을 경우에 각 신호 별로 오차가 제거되어 수평측위 성능향상을 확인하였다. 그러 므로 eLoran 시스템에서 H-field 안테나를 사용하기 위해서는 안테나의 방향에 따른 오차 요소를 정밀하게 제거해야한다. 추후에는 본 연구에서보다 정교한 모델링 방법 연구와 추가적 인 오차 제거에 관한 연구가 수행된다면 더 향상된 측위성능 이 기대된다.
후 기
본 논문은 선박해양플랜트연구소의 주요사업인 “해양 정밀 임무수행용 GNSS/INS/eLoran 복합항법 기반기술 개발”에 의 해 수행되었습니다(PES3110).