

1. м„ң лЎ
Loran-CлҠ” 1940л…„лҢҖл¶Җн„° мӮ¬мҡ©лҗң м „нҢҢн•ӯлІ•мӢңмҠӨн…ңмқҙлӢӨ. мңЎмғҒ м—җ кі м •лҗң м—¬лҹ¬ мҶЎмӢ көӯм—җм„ң нҠ№м •н•ң мӢ нҳёлҘј мҶЎмӢ н•ҳл©ҙ мҲҳмӢ кё°лҠ” к·ё мӢ нҳёлҘј мҲҳмӢ н•ңлӢӨ. к·ёлҰ¬кі мӢ нҳё мҲҳмӢ м§Җм җмқҳ мң„м№ҳлҘј мёЎм •н•ҳ м—¬ мӮ¬мҡ©мһҗм—җкІҢ м ңкіөн•ңлӢӨ. Loran-C мӢ нҳёлҠ” 100kHz нҺ„мҠӨнҢҢмқҙл©° м§Җн‘ңл©ҙмқ„ л”°лқј м „нҢҢлҗңлӢӨ.
1960л…„лҢҖ мң„м„ұн•ӯлІ•мӢңмҠӨн…ңмқҳ л“ұмһҘ мқҙнӣ„ к·ё н•„мҡ”м„ұмқҖ к°җмҶҢн•ҳ мҳҖмңјлӮҳ мң„м„ұн•ӯлІ• мӢ нҳём—җ 비н•ҙ Loran-C мӢ нҳёк°Җ м „нҢҢк°„м„ӯм—җ к°• мқён•Ёмқҙ м•Ңл Ө진 нӣ„м—җлҠ” Loran-C мӢңмҠӨн…ңмқ„ нҷңмҡ©н•ҳкё° мң„н•ң л§ҺмқҖ м—°кө¬к°Җ 진н–үлҗҳкі мһҲлӢӨ.
көӯлӮҙм—җм„ңлҠ” Loran мӢ нҳёк°Җ м „лӢ¬лҗҳлҠ” кіјм •м—җм„ң л°ңмғқн•ҳлҠ” мҳӨ м°Ёмҡ”мҶҢ мӨ‘ н•ҳлӮҳмқё ASF(Additional Secondary Phase Factor) лҘј м ңкұ°н•ЁмңјлЎңмҚЁ мӢңмҠӨн…ңмқҳ м„ұлҠҘмқ„ н–ҘмғҒмӢңнӮӨкі мһҗ н•ҳлҠ” м—°кө¬к°Җ мҲҳн–үлҗҳм—ҲлӢӨ. м „нҶөм Ғмқё Loran-C мӢңмҠӨн…ңмқҳ мӢ нҳём „лӢ¬мӢңк°„м°Ё (TDoA, Time Difference of Arrival)м—җ лҢҖн•ң ASFлҘј мӮ°м¶ңн•ҳкі м Ғмҡ©н•ҳм—¬ мёЎмң„ мҳӨм°ЁлҘј к°ңм„ н•ң кІ°кіјлҘј ліҙмқё м—°кө¬(Goo et al., 2007)к°Җ мһҲм—Ҳкі ToC(Time of Coincidence)к°Җ м—ҶлҠ” лЎңлһҖмӢ нҳё лЎңл¶Җн„° мӢ нҳём „лӢ¬мӢңк°„(ToA, Time of Arrival)м—җ лҢҖн•ң ASFлҘј мёЎм •н•ҳлҠ” кё°лІ•мқ„ к°ңл°ңн•ң м—°кө¬к°Җ мһҲм—ҲлӢӨ(Yang et al., 2010).
көӯм ңм ҒмңјлЎңлҠ” Loran-Cмқҳ м„ұлҠҘ н–ҘмғҒм—җ лҚ”н•ҳм—¬ мӢңк°ҒмӣҗмңјлЎң мӮ¬мҡ©н•ҳкі мһҗ н•ҳлҠ” м—°кө¬к°Җ мҲҳн–үлҗҳм—ҲлӢӨ. лҢҖн‘ңм ҒмңјлЎң Loran-CлҘј eLoran(enhanced Loran)мңјлЎң к°ңм„ мӢңнӮӨкё° мң„н•ң м—°кө¬к°Җ мһҲм—ҲлӢӨ. көӯм ңлЎңлһҖнҳ‘нҡҢ(ILA, International Loran Association)м—җ л”°лҘҙ л©ҙ Loran-CмҷҖ eLoranмқҳ мЈјмҡ”н•ң м°ЁмқҙлҠ” Loran-C мӢ нҳём—җ лҚ°мқҙ н„° мұ„л„җмқ„ 추к°Җн•ҳм—¬ мӢңк°ҒлҸҷкё°лҘј мң„н•ң м •ліҙ, ліҙм •м •ліҙ, мӢ нҳё л¬ҙ кІ°м„ұ м •ліҙ л“ұмқ„ л°©мҶЎн•ҳлҠ” кІғмқҙлӢӨ. мқҙлҹ¬н•ң л°©лІ•мңјлЎң eLoranмқҖ Loran-CліҙлӢӨ н–ҘмғҒлҗң мёЎмң„ м„ұлҠҘкіј н•Ёк»ҳ мӢңк°Ғм •ліҙлҘј м ңкіөн•ҳлҠ” кё°лҠҘмқ„ к°–лҠ”лӢӨ(ILA, 2007). eLoran мӢңмҠӨн…ңмқҳ м„ұлҠҘмқ„ нҸүк°Җн•ҳкё° мң„н•ң мӢңмҠӨн…ңмқҳ лӘ©н‘ңмҷҖ м•„нӮӨн…ҚмІҳ к·ёлҰ¬кі лҚ°мқҙн„° н‘ңліёмқ„ м ңмӢңн•ң м—°кө¬к°Җ мһҲм—Ҳкі (Peterson, 2003) eLoranмқҙ мӢңк°ҒлҸҷкё° лӘ©м ҒмңјлЎң мӮ¬мҡ©лҗ мҲҳ мһҲмқҢмқ„ ліҙмқё м—°кө¬к°Җ мһҲм—ҲлӢӨ(Roth et al., 2005).
мҳҒкөӯкіј м•„мқјлһңл“ңмқҳ мқјл°ҳ л“ұлҢҖкөӯ(GLAs, General Lighthouse Authorities of the United Kingdom and Ireland)мқҖ eLoran н”„ лЎңнҶ нғҖмһ… м„ң비мҠӨлҘј мҡҙмҳҒн•ң л°” мһҲлӢӨ(GLAs, 2012). мқҙ м„ң비мҠӨлҠ” мҳҒкөӯ Humber к°• м¶ңмһ…н•ӯлЎңм—җм„ң 10m(95%) мёЎмң„м •нҷ•лҸ„лҘј лӢ¬м„ұ н•ҳмҳҖлӢӨ(Offermans et al., 2015). лҳҗн•ң, 2013л…„кіј 2014л…„м—җ лҜё көӯм—җм„ң мҲҳн–үлҗң eLoran мӢңк°ҒлҸҷкё° мӢңн—ҳ кІ°кіјлҠ” 1гҺІмқҳ м •нҷ•лҸ„лҘј ліҙмҳҖлӢӨ(Offermans et al., 2017).
мқҙмҷҖ к°ҷмқҙ Loran-C мӢңмҠӨн…ңмқ„ нҷңмҡ©н•ҳкё° мң„н•ң лӢӨм–‘н•ң м—°кө¬к°Җ мҲҳн–үлҗҳм—ҲмңјлӮҳ Loran-C мІҙмқё к°„мқҳ мӢңк°ҒлҸҷкё° м—¬л¶ҖмҷҖ мғҒкҙҖм—Ҷмқҙ ліөмҲҳмқҳ мІҙмқёмқ„ н•Ёк»ҳ нҷңмҡ©н•ЁмңјлЎңмҚЁ мқҙл“қмқ„ м–»кі мһҗн•ҳлҠ” м—°кө¬лҠ” м°ҫм•„ліҙкё° м–ҙл өлӢӨ.
Loran-C мӢңмҠӨн…ңмқ„ кө¬л¶„н•ҳлҠ” лӢЁмң„лҠ” мІҙмқёмқёлҚ°, мқҙ мІҙмқёмқҖ нҺ„мҠӨ мӢ нҳё мҶЎмӢ мЈјкё°к°Җ к°ҷмқҖ нҠ№м • мҶЎмӢ көӯ 집лӢЁмқ„ мқҳлҜён•ңлӢӨ. н•ҳ лӮҳмқҳ Loran-C мІҙмқёмқҖ мЈјкөӯмқҙлқј л¶ҲлҰ¬лҠ” 1к°ңмқҳ мҶЎмӢ көӯкіј мў…көӯ мқҙлқј л¶ҲлҰ¬лҠ” 2пҪһ4к°ңмқҳ мҶЎмӢ көӯмңјлЎң кө¬м„ұлҗңлӢӨ. мЈјкөӯмқҙ лЁјм Җ мӢ нҳёлҘј мҶЎмӢ н•ҳл©ҙ к·ё мӢ нҳёлҘј мҲҳмӢ н•ң м—¬лҹ¬ мў…көӯмқҖ к°Ғкё° м •н•ҙ진 мӢң к°„ нӣ„ мӢ нҳёлҘј мҶЎмӢ н•ңлӢӨ. н•ҳлӮҳмқҳ мІҙмқём—җ мҶҚн•ң лӘЁл“ мҶЎмӢ көӯмқҙ мқј м •н•ң к°„кІ©мқ„ мң м§Җн•ҳл©° мқјл Ёмқҳ мҶЎмӢ мқ„ мҷ„лЈҢн•ҳл©ҙ лӢӨмӢң мЈјкөӯмқҙ мӢ нҳёлҘј мҶЎмӢ н•ҳкІҢ лҗҳлҠ”лҚ°, мЈјкөӯмқҙ мӢ нҳёлҘј н•ң лІҲ мҶЎмӢ н•ң мӢңм җл¶Җ н„° лӢӨмқҢ мӢ нҳёлҘј мҶЎмӢ н•ҳкё°к№Ңм§Җ кұёлҰ¬лҠ” мӢңк°„ к°„кІ©мқ„ GRI(Group Repetition Interval)лқј н•ңлӢӨ. н•ҳлӮҳмқҳ мІҙмқём—җ мҶҚн•ң лӘЁл“ мҶЎмӢ көӯ мқҳ GRIлҠ” лҸҷмқјн•ҳл©°, м „ м„ёкі„ лӘЁл“ мІҙмқёмқҖ м„ңлЎң лӢӨлҘё кі мң н•ң GRIлҘј к°Җ진лӢӨ. GRIмқҳ лӢЁмң„лҠ” л§ҲмқҙнҒ¬лЎңмҙҲ(гҺІ)мқёлҚ°, мқҙ GRIлҘј 10мңјлЎң лӮҳлҲҲ к°’мқ„ GRI м§Җм •мһҗлқј н•ҳл©° Loran мІҙмқёмқ„ мӢқлі„н•ҳлҠ” кё°нҳёлЎң мӮ¬мҡ©н•ңлӢӨ. мқҙмҷҖ к°ҷмқҖ л°©лІ•мңјлЎң н•ҳлӮҳмқҳ Loran-C мІҙмқё м—җ мҶҚн•ң лӘЁл“ мҶЎмӢ көӯмқҖ н•ҙлӢ№ мІҙмқё мЈјкөӯмқҳ мӢ нҳё мҶЎм¶ң мӢңк°Ғмқ„ кё°мӨҖмңјлЎң лҸҷкё°лҘј л§һ추кІҢ лҗңлӢӨ(USCG, 1992).
көӯлӮҙм—җм„ңлҠ” мӨ‘көӯм—җм„ң мҡҙмҳҒн•ҳлҠ” GRI7430 мІҙмқёкіј GRI8390 мІҙмқё к·ёлҰ¬кі лҢҖн•ңлҜјкөӯкіј лҹ¬мӢңм•„м—җм„ң мҡҙмҳҒн•ҳлҠ” GRI9930 мІҙмқё м—җ мҶҚн•ң м—¬лҹ¬ Loran-C мҶЎмӢ көӯм—җм„ң мҶЎм¶ңн•ң мӢ нҳёлҘј мҲҳмӢ н•ҳлҠ” кІғмқҙ к°ҖлҠҘн•ҳлӢӨ. к·ёлҹ°лҚ° Loran-C мҲҳмӢ кё°лҠ” м—¬лҹ¬ мІҙмқё мӨ‘ н•ҳлӮҳ л§Ңмқ„ м„ нғқн•ҳм—¬ н•ҙлӢ№ мІҙмқём—җ мҶҚн•ң мҶЎмӢ көӯ мӢ нҳёл§Ңмқ„ мң„м№ҳ мёЎм • м—җ мӮ¬мҡ©н•ңлӢӨ(USCG, 1992). мқҙм—җ л”°лқј мҲҳмӢ кё°к°Җ мң„м№ҳ мёЎм •м—җ мӮ¬мҡ©н•ҳлҠ” мӢ нҳёмқҳ мҲҳлҠ” н•ҳлӮҳмқҳ мІҙмқём—җ мҶҚн•ң мҶЎмӢ көӯмқҳ мҲҳлЎң м ң н•ңлҗҳл©° мқјл°ҳм ҒмңјлЎң 3пҪһ5к°ңмқҙлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” мІҙмқёмқ„ м„ нғқн•ҳм§Җ м•Ҡкі мҲҳмӢ лҗң лӘЁл“ Loran-C мӢ нҳёлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳлҠ” л°©лІ•мқ„ м ңм•Ҳн•ңлӢӨ. м ңм•Ҳн•ҳлҠ” л°©лІ•мқ„ мқҙмҡ©н•ҳл©ҙ мң„м№ҳлҘј мёЎм •н•ҳкё° мң„н•ҙ ліҙлӢӨ л§ҺмқҖ мӢ нҳёлҘј мқҙ мҡ©н• мҲҳ мһҲмңјлҜҖлЎң мҲҳмӢ кё° мёЎмң„ м„ұлҠҘмқҙ м •нҷ•лҸ„мҷҖ к°Җмҡ©м„ұ мёЎл©ҙ м—җм„ң н–ҘмғҒлҗ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.
лҳҗн•ң, м ңм•Ҳн•ҳлҠ” л°©лІ•мқҖ ліөмҲҳмқҳ м „нҶөм Ғмқё Loran-C мІҙмқёмқ„ н•ҳлӮҳмқҳ eLoranмңјлЎң к°ңм„ н•ҳкё° мң„н•ҙ мІҙмқё к°„мқҳ мӢңк°Ғмқ„ лҸҷкё° мӢң нӮ¬ н•„мҡ”к°Җ м—ҶлҠ” мғҲлЎңмҡҙ eLoranмқ„ к°ңл°ңн•ҳлҠ”лҚ° нҷңмҡ©н• мҲҳ мһҲмқ„ кІғмқҙлӢӨ. мқҙлҘј мң„н•ҙм„ңлҠ” мІҙмқё к°„мқҳ мӢңк°ҒлҸҷкё° м—¬л¶ҖмҷҖ кҙҖкі„м—Ҷмқҙ ASFлҘј мёЎм •н• мҲҳ мһҲлҠ” кё°мҲ мқҙ н•„мҡ”н•ҳм§Җл§Ң м„ңлЎң лӢӨлҘё мІҙмқёмқҳ мӢңк°ҒлҸҷкё°лҘј мң м§Җн•ҳлҠ”лҚ° н•„мҡ”н•ң 비мҡ©мқ„ м Ҳм•Ҫн• мҲҳ мһҲмқ„ кІғмңјлЎң кё°лҢҖлҗңлӢӨ.
eLoranмқ„ кө¬м„ұн•ҳлҠ” лӘЁл“ мҶЎмӢ кё°лҠ” н•ҳлӮҳмқҳ мӢңк°Ғмӣҗм—җ лҸҷкё°лҘј л§һм¶ҳлӢӨ(ILA, 2007). мҳҒкөӯмқҳ eLoranмқҖ лӢӨмҲҳ Loran-C мІҙмқёмқ„ кё° л°ҳмңјлЎң к°ңл°ңлҗҳм—ҲлҠ”лҚ° мқҙл“Ө мІҙмқёмқҖ м „нҶөм Ғмқё Loran-Cк°Җ м•„лӢҢ NELS(Northwest European Loran-C System)м—җ мҶҢмҶҚлҗң мІҙмқё мқҙм—ҲлӢӨ(Offermans et al., 2015). NELS мҶЎмӢ кё°лҠ” м „нҶөм Ғмқё Loran-C мҶЎмӢ кё°лҘј eLoran мҶЎмӢ кё°лЎң к°ңм„ н•ҳкё° мң„н•ҙ н•„мҡ”н•ң нҳ„ лҢҖнҷ”лҗң мӢңк°ҒлҸҷкё° мһҘм№ҳлҘј мқҙлҜё ліҙмң н•ң мғҒнғңмҳҖлӢӨ(GLAs, 2006). к·ёлҰ¬кі мІҙмқёкіј мғҒкҙҖм—Ҷмқҙ м•Ҫ 100гҺұ(Пғ)мқҳ м •нҷ•лҸ„лЎң н”„лһ‘мҠӨ Brest нҳ‘м •м„ёкі„мӢң(UTC, Coodinated Universal Time)м—җ лҸҷкё° лҗҳм–ҙ мһҲм—ҲлӢӨ(Jorgensen, 2000).
кө¬мІҙм Ғмқё л°©лІ•мқҖ 2мһҘм—җм„ң кё°мҲ н•ңлӢӨ. лӢӨмқҢмңјлЎң м ңм•Ҳн•ң л°©лІ• мқҳ мң нҡЁм„ұ м—¬л¶ҖлҘј нҷ•мқён•ҳкё° мң„н•ҙ мҲҳн–үн•ң мңЎмғҒ м •м§ҖмёЎмң„ мӢңн—ҳ кіј н•ҙмғҒ мқҙлҸҷмёЎмң„ мӢңн—ҳмқҳ л°©лІ•кіј кІ°кіјлҘј 3мһҘм—җм„ң кё°мҲ н•ңлӢӨ.
2. Loran-C лӢӨмӨ‘ мІҙмқё ToA мёЎмң„ м•Ңкі лҰ¬мҰҳ
ліё л…јл¬ём—җм„ң м ңм•Ҳн•ҳлҠ” ToA мёЎм •м№ҳлҘј мқҙмҡ©н•ҳлҠ” Loran-C лӢӨмӨ‘ мІҙмқё мёЎмң„ л°©лІ•мқҖ мһҳ м•Ңл Ө진 л°ҳліө мөңмҶҢм ңкіұлІ•м—җ мқҳн•ң мң„ м№ҳ кі„мӮ° л°©лІ•м—җ кё°мҙҲн•ңлӢӨ. лӢӨлҘё м җмқ„ кё°мҲ н•ҳл©ҙ м•„лһҳмҷҖ к°ҷлӢӨ.
мІ«м§ё, мҲҳмӢ кё°к°Җ м ңкіөн•ҳлҠ” мӣҗмӢң ToA мёЎм •м№ҳлҘј мЎ°м Ҳн•ң лӢӨмқҢ мң„м№ҳ кі„мӮ°м—җ мӮ¬мҡ©н•ңлӢӨ. мЎ°м Ҳн•ҳлҠ” м–‘мқҖ лӘЁл“ мёЎм •м№ҳм—җ лҸҷмқјн•ҳ лӢӨ. кө¬мІҙм Ғ л°©лІ•кіј мқҙлҹ¬н•ң л°©лІ•мқҳ н•„мҡ”м„ұмқҖ 2.1м—җ кё°мҲ н•ңлӢӨ.
л‘ҳм§ё, Loran-C мӢ нҳёлҠ” м§ҖмғҒнҢҢмқҙкё° л•Ңл¬ём—җ лҢҖкё°мҷҖ м§Җн‘ң мғҒ нғңм—җ мҳҒн–Ҙмқ„ л°ӣм•„ мӢ нҳё м „лӢ¬мқҙ м§Җм—°лҗңлӢӨ. м§Җм—°лҗң м–‘мқҖ лӘЁлҚёлЎң м¶”м •н•ҳм—¬ ліҙмғҒн•ңлӢӨ. лҳҗн•ң, л°ҳліө мөңмҶҢм ңкіұлІ•мқ„ мҲҳн–үн•Ём—җ мһҲм–ҙм„ң кұ°лҰ¬ кі„мӮ°мқҖ мёЎм§Җ л°©лІ•мңјлЎң кІ°м •н•ңлӢӨ.
м…Ӣм§ё, мІҙмқё к°„мқҳ мӢңмҠӨн…ң мӢң м°Ёмқҙк°Җ мң„м№ҳ мёЎм •м—җ мҳҒн–Ҙмқ„ лҜё м№ҳм§Җ м•ҠлҸ„лЎқ к°Ғ мІҙмқём—җ лҢҖн•ң мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ к°Ғкё° л”°лЎң м¶”м •н•ҳм—¬ м ңкұ°н•ңлӢӨ.
2.1 мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣкіј GRIм—җ мқҳн•ң ToA мёЎм •м№ҳ ліҖнҷ”
Coding Delay (CD)лҠ” к°Ғ мҶЎмӢ көӯ мӢ нҳёк°Җ кІ№міҗм§ҖлҠ” кІғмқ„ л°© м§Җн•ҳкё° мң„н•ң лӘ©м ҒмңјлЎң лӘЁл“ мў…көӯм—җ кі мң н•ҳкІҢ л¶Җм—¬н•ҳлҠ” к°’мқҙкі Emission Delay (ED)лҠ” мЈјкөӯмқҳ мӢ нҳё мҶЎм¶ң мӢңм җкіј к°Ғ мў…көӯмқҳ мӢ нҳё мҶЎм¶ң мӢңм җ мӮ¬мқҙмқҳ мӢңк°„ к°„кІ©мқҙлӢӨ. EDлҠ” CDм—җ мЈјкөӯ мӢ нҳё к°Җ н•ҙлӢ№ мў…көӯм—җ лҸ„м°©н•ҳкё°к№Ңм§Җ кұёлҰ¬лҠ” мӢңк°„мқ„ н•©н•ң к°’кіј к°ҷлӢӨ. мІ« лІҲм§ё мў…көӯм—җ н—Ҳмҡ©лҗҳлҠ” мөңмҶҢ CDлҠ” 11,000гҺІ мқҙкі лӢӨмқҢ мў…көӯ мқҳ CDлҠ” мқҙм „ мў…көӯмқҳ мӢ нҳё мҶЎм¶ңкіј кІ№міҗм§Җм§Җ м•ҠлҸ„лЎқ м •н•ңлӢӨ (Dickinson., 1959). к°Ғ мў…көӯ мӢ нҳёлҠ” 8к°ңмқҳ нҺ„мҠӨ к·ёлЈ№мңјлЎң кө¬м„ұ лҗҳл©° к°Ғ нҺ„мҠӨ к°„мқҳ к°„кІ©мқҖ 1,000гҺІмқҙлӢӨ. л”°лқјм„ң н•ҳлӮҳмқҳ к·ёлЈ№мқ„ лӘЁл‘җ м „мҶЎн•ҳлҠ”лҚ° 7,000гҺІк°Җ н•„мҡ”н•ҳкі лӢӨлҘё мў…көӯкіј кІ№м№ҳм§Җ м•Ҡ кё° мң„н•ҳм—¬ 1,000гҺІлҘј 추к°Җн•ңлӢӨ. мқҙм—җ л”°лқј мқјл°ҳм ҒмңјлЎң мў…көӯкіј лӢӨ мқҢ мў…көӯмқҖ мөңмҶҢ 8,000гҺІ мқҙмғҒмқҳ к°„кІ©мқ„ л‘җкі мӢ нҳёлҘј мҶЎм¶ңн•ңлӢӨ.
м „нҢҢк°Җ 8,000гҺІ лҸҷм•Ҳ лӮҳм•„к°ҖлҠ” кұ°лҰ¬лҠ” м•Ҫ 2,400гҺһмқҙлҜҖлЎң к·ј мІҳ н•ҳлӮҳмқҳ мІҙмқём—җ мҶҚн•ң лӘЁл“ мҶЎмӢ көӯмңјлЎңл¶Җн„° 2,400гҺһ мқҙлӮҙм—җ мң„м№ҳн•ң м§Җм җм—җм„ң мӢ нҳёлҘј мҲҳмӢ н•ҳл©ҙ к°Ғ мҶЎмӢ кё°лЎңл¶Җн„° мҲҳмӢ м§Җм җ к№Ңм§Җ мӢӨм ң м „нҢҢк°Җ м „лӢ¬лҗҳлҠ” мӢңк°„мқҖ 8,000гҺІ лҜёл§ҢмқҙлӢӨ. мқҙ м§Җм җ м—җм„ңлҠ” мҶЎмӢ көӯ к°„ мӢ нҳё мҶЎм¶ң мӢңк°„ к°„кІ©ліҙлӢӨ мӢ нҳём „лӢ¬мӢңк°„мқҙ мһ‘мңјлҜҖлЎң мҶЎмӢ көӯл“Өмқҙ мқјл Ёмқҳ мҲңм„ңлЎң мҶЎм¶ңн•ң мӢ нҳёк°Җ к·ё мҲңм„ңмқҳ ліҖнҷ” м—Ҷмқҙ м°ЁлЎҖлҢҖлЎң лҸ„м°©н• кІғмқҙлӢӨ.
мқҙмҷҖ к°ҷмқҖ мқҙмң лЎң н•ҙлӢ№ м§Җм җм—җ мҲҳмӢ кё°лҘј м„Өм№ҳн•ҳкі к·ё мҲҳмӢ кё°лЎңл¶Җн„° EDк°Җ ліҙмғҒлҗҳм§Җ м•ҠмқҖ мӣҗмӢң ToA мёЎм •м№ҳлҘј нҡҚл“қн•ҳл©ҙ к·ё к°’мқҙ мҶЎмӢ көӯ мӢ нҳё мҶЎм¶ң мҲңм„ңлҢҖлЎң нҒ¬лҰ¬лқјкі кё°лҢҖн• мҲҳ мһҲлӢӨ.
к·ёлҹ¬лӮҳ мӢӨм ң мӣҗмӢң ToA мёЎм •м№ҳлҘј мӮҙнҺҙліҙл©ҙ мЈјкөӯ мӢ нҳём—җ лҢҖ н•ң ToA мёЎм •м№ҳк°Җ л¶Җкөӯ мӢ нҳём—җ лҢҖн•ң ToA мёЎм •м№ҳліҙлӢӨ лҚ” нҒ° кІҪмҡ°лҸ„ мў…мў… л°ңмғқн•ңлӢӨ. мқҙлҹ¬н•ң нҳ„мғҒмқҙ л°ңмғқн•ҳлҠ” мқҙмң лҠ” мӣҗмӢң ToA мёЎм •м№ҳк°Җ мҲҳмӢ кё° мӢңкі„мқҳ м„ұлҠҘм—җ л”°лқј мқјм •н•ҳм§Җ м•Ҡкі м§Җ мҶҚм ҒмңјлЎң ліҖнҷ”н•ҳлҠ” мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣ(RCO, Receiver Clock Offset)мқ„ нҸ¬н•Ён•ҳкё° л•Ңл¬ёмқҙлӢӨ. мӢӨм ң мӢ нҳём „лӢ¬мӢңк°„кіј EDм—җ мқҙ RCOлҘј лҚ”н•ң к°’мқҙ GRIліҙлӢӨ нҒ¬кұ°лӮҳ мқҢмҲҳк°Җ лҗҳл©ҙ мҲҳмӢ кё°лҠ” к·ё к°’мқ„ н•ҙлӢ№ GRIлЎң лӮҳлҲҲ нӣ„ лӮҳлЁём§ҖлҘј мӣҗмӢң ToA мёЎм •м№ҳлЎң лӮҙм–ҙ мӨҖлӢӨ. Fig. 1мқҖ мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣкіј GRIм—җ мқҳн•ң ToA мёЎм • м№ҳ ліҖнҷ”лҘј м„ӨлӘ…н•ҳлҠ” к·ёлҰјмқҙлӢӨ. мІ« лІҲм§ё мӢңм җм—җ мЈјкөӯкіј л‘җ л¶Җкөӯ мӢ нҳём—җ лҢҖн•ң мӣҗмӢң ToA мёЎм •м№ҳлҠ” мқјл°ҳм Ғмқё к°’мқ„ к°Җм§Җм§Җл§Ң л‘җ лІҲм§ё мӢңм җм—җ мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқҙ мҰқк°Җн•ҳм—¬ Zкөӯ мӢ нҳём—җ лҢҖн•ң мӣҗмӢң ToA мёЎм •м№ҳк°Җ GRI лІ”мң„лҘј л„ҳм–ҙм„ лӢӨ. мҲҳмӢ кё°лҠ” GRI ліҙ лӢӨ нҒ° мӣҗмӢң ToA мёЎм •м№ҳк°Җ м•„лӢҢ GRIлЎң лӮҳлҲҲ лӮҳлЁём§Җ к°’мқ„ лӮҙ м–ҙмӨҖлӢӨ.
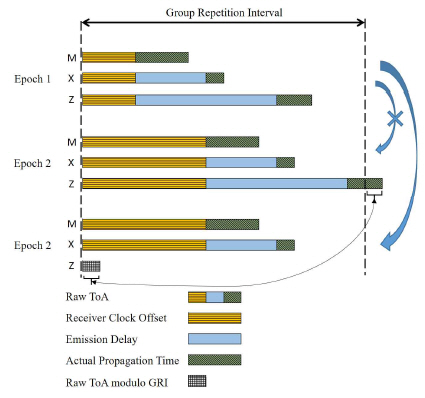
мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ м ңкұ°н•ҳл©ҙ мқҙлҹ¬н•ң нҳ„мғҒмқҙ н•ҙкІ°лҗ кІғ мңјлЎң ліҙмқёлӢӨ. Fig. 1мқҳ мІ« лІҲм§ё мғҒнҷ©мІҳлҹј мқјл°ҳм Ғмқё кІҪмҡ°м—җлҠ” 2.3м—җм„ң м„ӨлӘ…н• мөңмҶҢм ңкіұл°©лІ•мңјлЎң мҲҳмӢ кё° мӢңкі„ мҳӨм°ЁлҘј л°”лҘҙкІҢ м¶”м •н•ҳм—¬ м ңкұ°н• мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ л‘җ лІҲм§ё мғҒнҷ©кіј к°ҷмқҖ кІҪмҡ°м—җ лҠ” мөңмҶҢм ңкіұл°©лІ•мқ„ мқҙмҡ©н•ҳл©ҙ мҲҳмӢ кё° мӢңкі„ мҳӨм°ЁлҘј л°”лҘҙкІҢ м¶”м • н•ҳм§Җ лӘ» н•ҳм—¬ мөңмў…м ҒмңјлЎң кІ°м •лҗң мң„м№ҳк°Җ л§Өмҡ° нҒ° мҳӨм°ЁлҘј нҸ¬н•Ё н•ҳкІҢ лҗңлӢӨ.
л”°лқјм„ң ліё л…јл¬ём—җм„ңлҠ” мһ„мқҳмқҳ мӢңк°„ мҳӨн”„м…Ӣмқ„ л¶Җм—¬н•ЁмңјлЎңмҚЁ лӘЁл“ мҲҳмӢ мӢ нҳём—җ лҢҖн•ң мӣҗмӢң ToA мёЎм •м№ҳлҘј мЎ°м Ҳн•ҳм—¬ Fig. 1мқҳ мІ« лІҲм§ё мғҒнҷ©мІҳлҹј мқјл°ҳм Ғмқё кІҪмҡ°лЎң ліөмӣҗмӢңнӮӨкі мһҗ н•ҳмҳҖлӢӨ.
кө¬мІҙм ҒмңјлЎң лЁјм Җ мӣҗмӢң ToA мёЎм •м№ҳм—җ мһ„мқҳмқҳ мӢңк°„ мҳӨм°ЁлҘј л¶Җм—¬н•ңлӢӨ. мқҙ к°’мқ„ GRIлЎң лӮҳлҲҲ нӣ„ к·ё лӮҳлЁём§ҖлҘј м·Ён•ҳм—¬ мЎ°м Ҳлҗң ToA мёЎм •м№ҳлҘј кө¬н•ңлӢӨ. к·ёлҰ¬кі мқҙ мЎ°м Ҳлҗң ToA мёЎм •м№ҳк°Җ нҠ№м • мЎ°кұҙмқ„ л§ҢмЎұмӢңнӮӨм§Җ лӘ» н•ҳл©ҙ лӢӨмӢң мІҳмқҢмңјлЎң лҸҢм•„к°Җм„ң 추к°Җм Ғмқё мӢңк°„ мҳӨм°ЁлҘј л¶Җм—¬н•ҳлҠ” кіјм •мқ„ л°ҳліөн•ңлӢӨ. к°Ғ мІҙмқёлі„ мӢ нҳём—җ лҢҖ н•ң ToA мёЎм •м№ҳ нҒ¬кё°мҲңм„ңк°Җ мӢ нҳё мҶЎм¶ң мҲңм„ңмҷҖ лҸҷмқјн•ҳл©ҙ мЎ°кұҙ мқ„ л§ҢмЎұн•ҳлҠ” кІғмңјлЎң ліҙкі л°ҳліөмқ„ мў…лЈҢн•ңлӢӨ. мқҙ кіјм •мқ„ нҶөн•ҙ мЎ° м Ҳлҗң ToA мёЎм •м№ҳлҠ” мһ„мқҳмқҳ мӢңк°„ мҳӨм°Ёк°Җ л¶Җм—¬лҗҳм—ҲмңјлӮҳ к·ё м–‘ мқҖ мІҙмқёмқ„ кө¬л¶„н•ҳм§Җ м•Ҡкі мҲҳмӢ лҗң лӘЁл“ ToA мёЎм •м№ҳм—җ лҸҷмқјн•ҳ кё° л•Ңл¬ём—җ 추нӣ„ мң„м№ҳлҘј мёЎм •н•ҳлҠ” кіјм •м—җм„ң м ңкұ°лҗңлӢӨ.
2.2 мқҳмӮ¬кұ°лҰ¬ мҳӨм°Ё
м „нҢҢн•ӯлІ•мӢңмҠӨн…ңмқҳ ToA мёЎм •м№ҳлҠ” м—¬лҹ¬ мӣҗмқём—җ мқҳн•ҳм—¬ л°ңмғқ н•ҳлҠ” лӢӨм–‘н•ң мҳӨм°ЁлҘј нҸ¬н•Ён•ңлӢӨ. к·ёлҹ¬лӮҳ м—¬лҹ¬ мҳӨм°Ё м„ұ분мқ„ нҒ° лІ” мң„лЎң 분лҘҳн•ҳл©ҙ мӢқ в‘ҙкіј к°ҷмқҖ 분лҘҳк°Җ к°ҖлҠҘн•ҳлӢӨ.
ToAMмқҖ мҲҳмӢ кё°к°Җ мёЎм •н•ң мӣҗмӢң ToA к°’мқҙкі ToATлҠ” мӢӨм ң ToA к°’мқҙлӢӨ. TETлҠ” мӢ нҳё мҶЎм¶ң мӢңк°Ғ мҳӨм°Ёмқҙкі TERмқҖ мӢ нҳё мҲҳмӢ мӢңк°Ғ мҳӨм°ЁмқҙлӢӨ. PDлҠ” м „нҢҢк°Җ м „лӢ¬лҗҳлҠ” лҸҷм•Ҳ л°ңмғқн•ң м§Җ м—° мӢңк°„мқҙлӢӨ.
мӢқ в‘ҙмқҳ ToAMм—җ н•ҙлӢ№н•ҳлҠ” к°’мқҖ 2.1мқҳ кІ°кіјмқё мЎ°м Ҳлҗң ToA мёЎм •м№ҳ ToAAмқҙлӢӨ. ToATлҠ” мӢ нҳём „лӢ¬мӢңк°„мқҳ м°ёк°’мқҙлӢӨ. BIлҠ” 2.1м—җм„ң мһ„мқҳлЎң л¶Җм—¬н•ң мӢңк°„ мҳӨм°ЁмқҙлӢӨ. TETлҠ” EDм—җ мқҳн•ң мӢң к°„ мҳӨн”„м…Ӣ OEDмҷҖ мҶЎмӢ мһЎмқҢ NTлЎң к°„мЈјн•ңлӢӨ. Loran-C мҶЎмӢ көӯ мқҖ м§ҖмғҒкөӯмқҙл©° мӢңмҠӨн…ңмқҖ мһҗмІҙм ҒмңјлЎң н•ӯмғҒ мӢңкі„ мҳӨм°ЁлҘј мЎ°м Ҳн•ҳ кё° л•Ңл¬ём—җ л°”мқҙм–ҙмҠӨ м„ұ분мқҳ мҶЎмӢ мӢңк°Ғ мҳӨм°Ёк°Җ кұ°мқҳ л°ңмғқн•ҳм§Җ м•Ҡмқ„ кІғмңјлЎң мӮ¬лЈҢлҗҳкё° л•Ңл¬ёмқҙлӢӨ. лҳҗн•ң TERлҠ” мҲҳмӢ кё° мӢңкі„ мҳӨ н”„м…Ӣм—җ мқҳн•ң л°”мқҙм–ҙмҠӨ BR к·ёлҰ¬кі мҲҳмӢ мһЎмқҢ NRмқ„ мқҳлҜён•ңлӢӨ. PDлҠ” PF (Primary Phase Factor), SF (Secondary Phase Factor) к·ёлҰ¬кі ASFлЎң кө¬л¶„лҗңлӢӨ. PFлҠ” м „нҢҢк°Җ лҢҖкё° мӨ‘м—җм„ң м „лӢ¬лҗҳлҠ” мҶҚлҸ„к°Җ 진кіө мӨ‘м—җм„ң м „лӢ¬лҗҳлҠ” мҶҚлҸ„ліҙлӢӨ м•Ҫк°„ лҠҗл Өм§Җ кё°м—җ л°ңмғқн•ҳкі SFлҠ” н•ҙмҲҳл©ҙ мң„лЎң м „лӢ¬лҗ л•Ң лҚ”мҡұ лҠҗл Өм§Җкё° л•Ңл¬ём—җ л°ңмғқн•ңлӢӨ. ASFлҠ” PFмҷҖ SF мқҙмҷёмқҳ мҡ”мҶҢм—җ мқҳн•ҙ л°ңмғқ н•ҳлҠ” м§Җм—°мқ„ мқҳлҜён•ңлӢӨ(RTCM, 2016).
EDлҠ” лӘ…лӘ©мғҒ м •н•ҙ진 мғҒмҲҳмқҙкё° л•Ңл¬ём—җ OEDлҠ” мҷ„м „нһҲ м ңкұ° лҗңлӢӨ. лӢӨмқҢмңјлЎң мӢқ ⑶과 к°ҷмқҙ мқҳмӮ¬кұ°лҰ¬(PR, Pseudorange)лҘј кө¬н•ңлӢӨ. cлҠ” м „нҢҢ м „лӢ¬мҶҚлҸ„мқҙл©° 299.792458m/us мқҙлӢӨ.
PRм—җ нҸ¬н•Ёлҗң PFмҷҖ SFм—җ мқҳн•ҙ кұ°лҰ¬ мҳӨм°ЁлҠ” лӘЁлҚёмқ„ мқҙмҡ©н•ҳ м—¬ ліҙмғҒн• мҲҳ мһҲлӢӨ. ліё л…јл¬ём—җм„ңлҠ” RTCM(Radio Technical Commission for Maritime Service)мқҳ eLoran мҲҳмӢ кё°к°Җ 갖추 м–ҙм•ј н•ҳлҠ” мөңмҶҢ м„ұлҠҘ н‘ңмӨҖ л¬ём„ңм—җ м ңмӢңлҗң Brunavs лӘЁлҚёмқ„ мқҙ мҡ©н•ңлӢӨ(RTCM, 2016). мқҙ лӘЁлҚёмқҖ мӢқ в‘·мҷҖ к°ҷмқҙ мӢ нҳё м „лӢ¬ кұ° лҰ¬лҘј мһ…л ҘмңјлЎң л°ӣкі мӢ нҳёк°Җ мһ…л Ҙлҗң кұ°лҰ¬лҘј лӮҳм•„к°ҖлҠ” лҸҷм•Ҳ л°ң мғқн•ҳлҠ” мң„мғҒ м§Җм—°мқ„ м¶ңл Ҙн•ңлӢӨ.
SлҠ” мһ…л Ҙ ліҖмҲҳлЎң лҜён„° лӢЁмң„мқҳ кұ°лҰ¬ к°’м—җ 10-5мқ„ кіұн•ң к°’мқҙ лӢӨ. C1вҲј5лҠ” кі„мҲҳлЎң C1 = - 111, C2 = 98.20, C3 = -13.51, C4 = 112.8, C5 = -0.254 мқҙлӢӨ. ПҒлҠ” м¶ңл Ҙ ліҖмҲҳлЎң лҜён„° лӢЁмң„мқҳ мң„мғҒ м§Җм—°мқ„ лӮҳнғҖлӮёлӢӨ.
мң„м№ҳлҘј кі„мӮ°н•ҳкё° мң„н•ҙ л°ҳліөмөңмҶҢм ңкіұлІ•мқ„ мҲҳн–үн•ҳлҠ” кіјм •м—җ м„ң л§Ө л°ҳліөл§ҲлӢӨ л°ңмғқн•ҳлҠ” мҳҲмёЎлҗң мң„м№ҳмҷҖ мӢ нҳё мҶЎмӢ м§Җм җ мӮ¬мқҙ мқҳ мёЎм§Җ кұ°лҰ¬лҘј мӢқ в‘·м—җ мһ…л Ҙн•ҳкі , к·ё кІ°кіј нҡҚл“қн•ң мң„мғҒ м§Җм—° мқ„ н•ҙлӢ№ мёЎм§Җ кұ°лҰ¬м—җ м Ғмҡ©н•ҳм—¬ мқҳмӮ¬кұ°лҰ¬ мҳҲмёЎм№ҳлҘј кө¬н•ҳкі к·ё мқҳмӮ¬кұ°лҰ¬ мҳҲмёЎм№ҳлҘј мӢқ ⑶мқҳ мқҳмӮ¬кұ°лҰ¬мҷҖ 비көҗн•ҳм—¬ мҳӨм°ЁлҘј м¶”м • н•ҳлҠ” л°©лІ•мңјлЎң PFмҷҖ SFм—җ мқҳн•ң кұ°лҰ¬ мҳӨм°ЁлҘј ліҙмғҒн•ңлӢӨ.
мқҙмҷҖ к°ҷмқҖ кіјм •мқ„ нҶөн•ҙ мӢқ (2)мқҳ мҳӨм°Ё м„ұ분 мӨ‘ OEDмҷҖ PF, SFк°Җ м ңкұ°лҗңлӢӨ. лӮЁм•„мһҲлҠ” мҳӨм°Ё м„ұ분 BI , NT, BR , NR к·ёлҰ¬кі ASFлҠ” мөңмў…м Ғмқё мёЎмң„ кІ°кіјм—җ мҳҒн–Ҙмқ„ лҜём№ мҲҳ мһҲлӢӨ. BIлҠ” лӘЁ л“ мёЎм •м№ҳм—җ лҸҷмқјн•ң нҒ¬кё°мқҳ мҳӨм°ЁлЎң мһ‘мҡ©н•ҳкё° л•Ңл¬ём—җ мң„м№ҳ мёЎ м • кіјм •м—җм„ң м¶”м •лҗҳм–ҙ м ңкұ°лҗ кІғмқҙлӢӨ. к·ёлҹ¬лӮҳ BRмқҖ лҸҷмқјн•ң мІҙмқём—җ мҶҚн•ң мҶЎмӢ көӯ мёЎм •м№ҳм—җл§Ң кіөнҶөмқҙл©° м„ңлЎң лӢӨлҘё мІҙмқё мҶҚ н•ң мҶЎмӢ көӯ мёЎм •м№ҳм—җлҠ” м„ңлЎң лӢӨлҘҙкІҢ мһ‘мҡ©н•ҳкё° л•Ңл¬ём—җ лӢӨмӨ‘ мІҙ мқё мӢ нҳёлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳкё° мң„н•ҙм„ңлҠ” BRмқҙ м Ғм Ҳн•ң л°©лІ•мңјлЎң м ңкұ°лҗҳм–ҙм•ј н•ңлӢӨ. BIмҷҖ BRмқ„ м ңкұ°н•ҳлҠ” кіјм •мқҖ 2.3 м—җ кё°мҲ н•ңлӢӨ. мӢқ в‘өмқҳ мҳӨм°Ё м„ұ분 мӨ‘ мөңмў…м ҒмңјлЎң ліё л…јл¬ёмқҳ л°© лІ•мңјлЎң кІ°м •н•ң мң„м№ҳм—җ мҳҒн–Ҙмқ„ лҜём№ҳлҠ” м„ұ분мқҖ NTкіј NR к·ёлҰ¬ кі ASFмқҙлӢӨ.
2.3 Loran-C лӢӨмӨ‘ мІҙмқё мёЎмң„ л°©лІ•
ToAлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј кө¬н•ҳлҠ” м „нҢҢн•ӯлІ•мӢңмҠӨн…ң мҲҳмӢ кё°лҠ” м—¬лҹ¬ мҶЎмӢ көӯ мң„м№ҳмҷҖ к°Ғ мҶЎмӢ көӯ мӢ нҳём—җ лҢҖн•ң мқҳмӮ¬кұ°лҰ¬ мёЎм •м№ҳ лҘј мқҙмҡ©н•ҳм—¬ мӢ нҳё мҲҳмӢ м§Җм җмқҳ мң„м№ҳлҘј кө¬н•ңлӢӨ.
Loran-C мӢңмҠӨн…ңмқҳ мҶЎмӢ көӯмқҖ мңЎмғҒм—җ кі м •лҗҳм–ҙ мқҙлҸҷн•ҳм§Җ м•Ҡ кё° л•Ңл¬ём—җ мҶЎмӢ көӯ мӢ нҳё мҶЎмӢ м§Җм җмқҳ 2м°Ёмӣҗ мң„м№ҳк°Җ кіөн‘ңлҗңлӢӨ. мқҳмӮ¬кұ°лҰ¬лҠ” мӢқ в‘ёмҷҖ к°ҷмқҙ мӢ нҳё мҶЎмҲҳмӢ м§Җм җ к°„ мёЎм§Җкұ°лҰ¬мҷҖ мҲҳ мӢ кё° мӢңкі„ мҳӨн”„м…Ӣ л“ұк°Җ кұ°лҰ¬мқҳ н•©мңјлЎң лӮҳнғҖлӮј мҲҳ мһҲлӢӨ.
мӢқ в‘ёмқҳ ПҒiлҠ” iлІҲм§ё мҶЎмӢ көӯ мӢ нҳём—җ лҢҖн•ң мқҳмӮ¬кұ°лҰ¬мқҙкі gdi лҠ” мӢ нҳё мҲҳмӢ м§Җм җкіј iлІҲм§ё мӢ нҳё мҶЎмӢ м§Җм җ к°„ мёЎм§Җкұ°лҰ¬мқҙлӢӨ. cлҠ” м „нҢҢ м „лӢ¬ мҶҚлҸ„мқҙкі tuлҠ” мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…ӢмқҙлӢӨ. gdiмқ„ кө¬н•ҳкё° мң„н•ҙм„ңлҠ” мҶЎмӢ м§Җм җмқҳ 2м°Ёмӣҗ мң„м№ҳмҷҖ мҲҳмӢ м§Җм җмқҳ 2м°Ё мӣҗ мң„м№ҳк°Җ н•„мҡ”н•ҳлӢӨ. мҲҳмӢ м§Җм җмқҳ мң„м№ҳлҠ” лҜём§ҖмҲҳмқҙлҜҖлЎң мӢқ в‘ё мқҳ лҜём§ҖмҲҳлҠ” 3к°ңк°Җ лҗңлӢӨ. л”°лқјм„ң мӢқ в‘ёлҘј н’Җкё° мң„н•ҙм„ңлҠ” мөңмҶҢ 3к°ң мқҙмғҒмқҳ мқҳмӮ¬кұ°лҰ¬к°Җ н•„мҡ”н•ҳл©° мқҙ л¬ём ңлҠ” 3к°ңмқҳ лҜём§ҖмҲҳлҘј кө¬н•ҳлҠ” л№„м„ нҳ• мӢңмҠӨн…ңмқҳ н•ҙлҘј кө¬н•ҳлҠ” л¬ём ңк°Җ лҗңлӢӨ. мқҙ л¬ём ңмқҳ н•ҙлҠ” м„ нҳ•нҷ” кё°л°ҳ л°ҳліөм Ғ кё°лІ•мңјлЎң кө¬н• мҲҳ мһҲлӢӨ(Kaplan and Hegarty, 2005).
л°ҳліөм Ғ кё°лІ•мқҖ мӢқ в‘№кіј к°ҷмқҖ н•ҙлҘј к°–лҠ”лӢӨ. delxлҠ” кё° м¶”м • лҗң мҲҳмӢ мң„м№ҳмҷҖ мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқҙ нҸ¬н•Ён•ң мҳӨм°ЁлҘј м¶”м •н•ң к°’мқҙлӢӨ. мҙҲкё° мң„м№ҳлӮҳ кё° м¶”м • мң„м№ҳм—җ delxлҘј ліҙмғҒн•ЁмңјлЎңмҚЁ лӢӨмқҢ нҡҢ мң„м№ҳлҘј кІ°м •н•ңлӢӨ. м¶”м •лҗң мң„м№ҳк°Җ мӮ¬мҡ©мһҗк°Җ мӣҗн•ҳлҠ” мҲҳмӨҖмңјлЎң мҲҳл ҙн•ҳл©ҙ л°ҳліөмқ„ мў…лЈҢн•ҳкі мөңмў… мң„м№ҳлЎң кІ°м •н•ңлӢӨ. кө¬л©ҙ мўҢн‘ңлҘј мқҙмҡ©н•ҳм—¬ мӢ нҳё кҙҖмёЎ н–үл ¬мқ„ кө¬н•ҳлҠ” л°©лІ•кіј н•ҙлӢ№ мң„лҸ„м—җм„ң м§Җкө¬ кіЎлҘ мқ„ кі л Өн•ҳм—¬ мң„м№ҳ мҳӨм°ЁлҘј мЎ°м •н•ҳлҠ” л°©лІ•мқҖ Groves(2013)мқҳ л°©лІ•мқ„ м°ёкі н•ҳмҳҖмңјл©° мқҙлҠ” мӢқ в‘№, в‘», в‘јмҷҖ к°ҷлӢӨ.
мӢқ в‘әмқҳ ПҒnмқҖ nлІҲм§ё мҶЎмӢ көӯм—җ лҢҖн•ң мқҳмӮ¬кұ°лҰ¬ мёЎм •м№ҳлҘј лӮҳ нғҖлӮҙкі ПҒ i n ^ L ^ i ПҲ i n L ^ i О» ^ i b ^ i
н•ңнҺё, мқјл°ҳм ҒмңјлЎң к°Ғ мІҙмқёмқҳ кё°мӨҖ мҳӨмӢӨл Ҳмқҙн„°лӮҳ мӢңмҠӨн…ң мӢң к°ҒмқҖ м„ңлЎң лҸҷкё° лҗҳм–ҙ мһҲм§Җ м•Ҡкё° л•Ңл¬ём—җ м„ңлЎң к°„мқҳ нҺ„мҠӨ мӢ нҳё мғқм„ұ мӢңм җлҸ„ лӢӨлҘҙлӢӨ. мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…ӢмқҖ мӢңмҠӨн…ң мӢңмҷҖ мҲҳмӢ кё° мӢңмқҳ м°Ёмқҙ мқҙлҜҖлЎң, л‘җ мІҙмқёмқҳ мӢңкі„к°Җ лҸҷкё° лҗҳм§Җ м•Ҡм•ҳлӢӨл©ҙ к°Ғ мІҙмқёмқҳ кё°мӨҖ мӢңкі„лҠ” лӢӨлҘҙл©° мқҙм—җ л”°лқј мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣ лҸ„ л‘ҳлЎң кө¬л¶„лҗҳм–ҙм•ј н•ңлӢӨ. к·ёлҹ°лҚ° мӢқ в‘әпҪһв‘Ҫмқ„ ліҙл©ҙ мӮ¬мҡ©мһҗ мң„ лҸ„ кІҪлҸ„мҷҖ н•Ёк»ҳ мқҳмӮ¬кұ°лҰ¬м—җ нҸ¬н•Ёлҗң кіөнҶөлҗң м„ұ분мқҳ мҳӨм°ЁлҘј н•ҳ лӮҳмқҳ к°’мңјлЎң кө¬н•ҳлҸ„лЎқ м„Өкі„лҗҳм—Ҳкё° л•Ңл¬ём—җ мқҙ л°©лІ•мқ„ мқҙмҡ©н•ҳл©ҙ мІҙмқё лі„лЎң лӢӨлҘё мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣ BRмқҙ н•ҳлӮҳлЎң кі„мӮ°лҗҳл©° лӮҳлЁём§Җ м„ұ분мқҙ мң„м№ҳ кІ°м •м—җ л°ҳмҳҒлҗңлӢӨ. л”°лқјм„ң ліё л…јл¬ём—җм„ңлҠ” к°Ғ мІҙмқёмқҳ мӢңмҠӨн…ң мӢңмқҳ м°Ёмқҙк°Җ мөңмў…м Ғмқё мёЎмң„ кІ°кіјм—җ мҳҒн–Ҙмқ„ лҜём№ҳм§Җ м•ҠлҸ„лЎқ мӢқ в‘әпҪһв‘Ҫмқ„ мӢқ в‘ҫпҪһв’ҒлЎң нҷ•мһҘн•ҳмҳҖлӢӨ.
мӢқ в‘ҫпҪһв’Ғм—җм„ң kлҠ” к°Ғ мІҙмқёмқҳ лІҲнҳёлҘј мқҳлҜён•ҳкі mмқҖ мІ« лІҲ м§ё мІҙмқёмқҳ мӢ нҳёмҲҳлҘј мқҳлҜён•ҳл©° nмқҖ kлІҲм§ё мІҙмқёмқҳ мӢ нҳёмҲҳлҘј мқҳ лҜён•ңлӢӨ. мӢқ в‘ҝмқҳ мҡ°ліҖмқҖ мІҙмқёмқҳ мҲҳк°Җ kмқё кІҪмҡ° 2 + kм°Ё м •мӮ¬к°Ғ н–үл ¬мқҙ лҗңлӢӨ. мқҙ н–үл ¬мқҳ 1н–ү 1м—ҙкіј 2н–ү 2м—ҙмқ„ м ңмҷён•ң лӘЁл“ мӣҗ мҶҢлҠ” лҸҷмқјн•ң нҒ¬кё°мқҳ лӢЁмң„н–үл ¬кіј к°ҷлӢӨ. мӢқ в’Җмқҳ мҡ°ліҖмқҖ мҙқ мқҳмӮ¬ кұ°лҰ¬мқҳ мҲҳмҷҖ к°ҷмқҖ н–үкіј 2 + kк°ңмқҳ м—ҙмқ„ к°–лҠ” н–үл ¬мқҙлӢӨ. 3м—ҙ мқҙ мғҒмқҳ м—ҙмқҳ м„ұ분мқҖ 0 нҳ№мқҖ 1мқҙл©°, к°Ғ н–үмқҳ 3пҪһkм—ҙ м„ұ분мқҳ н•©мқҖ 1мқҙлӢӨ. к°Ғ н–үмқҳ 3пҪһkм—ҙмқҖ лҸҷмқјн•ң мІҙмқём—җ мҶҚн•ң мқҳмӮ¬кұ°лҰ¬м—җ лҢҖ н•ҙм„ңлҠ” лҸҷмқјн•ҳкі м„ңлЎң лӢӨлҘё мІҙмқём—җ мҶҚн•ң кІҪмҡ° м„ңлЎң лӢӨлҘҙлӢӨ. мӢқ в’Ғмқҳ м„ұ분мқҖ мң„лҸ„ мҳӨм°ЁмҷҖ кІҪлҸ„ мҳӨм°Ё к·ёлҰ¬кі к°Ғ мІҙмқё лі„ мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқҳ мҳӨм°ЁмқҙлӢӨ.
мӢқ в’ӮлҠ” мӢқ в‘ҫпҪһв’ҒлҘј нҶөн•ҙ мӢ нҳё мҲҳмӢ м§Җм җмқҳ мң„м№ҳмҷҖ мІҙмқёлі„ мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ к°ұмӢ н•ҳлҠ” кө¬мІҙм Ғмқё кіјм •мқ„ ліҙм—¬мӨҖлӢӨ.
лӢӨмӨ‘ мІҙмқёмқ„ мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳкё° мң„н•ҙм„ңлҠ” мӢқ в’ӮмҷҖ к°ҷмқҙ мӮ¬мҡ©мһҗ мң„м№ҳмқҳ мң„лҸ„, кІҪлҸ„мҷҖ к°Ғк°Ғмқҳ мІҙмқём—җ лҢҖн•ң мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ кө¬н•ҳм—¬м•ј н•ҳлҜҖлЎң kк°ңмқҳ мІҙмқёмңјлЎң мң„м№ҳлҘј кө¬н•ҳ кё° мң„н•ҙм„ңлҠ” мөңмҶҢ 2 + kк°ңмқҳ мқҳмӮ¬кұ°лҰ¬к°Җ н•„мҡ”н•ҳлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” мӢқ в‘ҫмқҳ ПҒ i k , n ^ ПҲ i k , n ПҒ i k , n ^
3. мӢңн—ҳ л°Ҹ кІ°кіј
м ңм•Ҳн•ҳлҠ” л°©лІ•мқҳ мң нҡЁм„ұмқ„ нҷ•мқён•ҳкё° мң„н•ҙ л‘җ к°Җм§Җ мӢӨмёЎ мӢң н—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. лЁјм Җ м•Ҳн…ҢлӮҳк°Җ мңЎмғҒм—җ кі м •лҗң мғҒнғңлЎң мң„м№ҳ лҘј мёЎм •н•ҳлҠ” мңЎмғҒ м •м§ҖмёЎмң„ мӢңн—ҳмқ„ мҲҳн–үн•ҳмҳҖкі лӢӨмқҢ н•ҙмғҒм—җм„ң мқҙлҸҷн•ҳл©° мң„м№ҳлҘј мёЎм •н•ҳлҠ” н•ҙмғҒ мқҙлҸҷмёЎмң„ мӢңн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ.
м—¬лҹ¬ Loran-C мІҙмқёмқҳ мӢ нҳёлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳлҠ” л°© лІ•мқҙ мң нҡЁн•ңм§ҖлҘј нҷ•мқён•ҳкё° мң„н•ҙм„ңлҠ” лӢӨм–‘н•ң нҷҳкІҪм—җм„ң мҲҳ집лҗң мӢ нҳёлҘј мқҙмҡ©н•ң мӢңн—ҳмқҙ н•„мҡ”н•ҳлӢӨ. к·ёлҹ¬лӮҳ мқҙлҹ¬н•ң л°©лІ•мқ„ мҲҳн–ү н•ҳкё° мң„н•ҙм„ңлҠ” л§ҺмқҖ 비мҡ©мқҙ н•„мҡ”н•ҳкё° л•Ңл¬ём—җ ліё л…јл¬ём—җм„ңлҠ” 1 нҡҢмқҳ м •м§Җ мёЎмң„ мӢңн—ҳм—җм„ң к°ҖлҠҘн•ң л§ҺмқҖ мҶЎмӢ көӯ мӢ нҳём—җ лҢҖн•ң лҚ° мқҙн„°лҘј мҲҳ집н•ҳкі мҲҳ집лҗң мёЎм •м№ҳлҘј мӢ нҳёлі„лЎң лӢӨм–‘н•ҳкІҢ мЎ°н•©н•ҳ м—¬ лӢӨм–‘н•ң мӢ нҳё мҲҳмӢ нҷҳкІҪмқ„ лӘЁмӮ¬н•ң лӢӨмқҢ м ңм•Ҳн•ҳлҠ” л°©лІ•мқ„ мӢң н—ҳн•ҳмҳҖлӢӨ. лӢӨмқҢмңјлЎң м ңм•Ҳн•ң л°©лІ•мқҙ мӢӨм ң н•ӯн•ҙ мӨ‘мқё м„ л°•мқҳ м„ мң„кІ°м •м—җ мӮ¬мҡ©лҗ мҲҳ мһҲмқ„м§Җ м—¬л¶ҖлҘј нҷ•мқён•ҳкё° мң„н•ҙ м„ л°•м—җ мҲҳ мӢ мһҘ비лҘј нғ‘мһ¬н•ҳкі н•ҙмғҒм—җм„ң мқҙлҸҷн•ҳл©ҙм„ң мң„м№ҳлҘј мёЎм •н•ҳлҠ” н•ҙ мғҒ мқҙлҸҷмёЎмң„ мӢңн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ.
3.1 мңЎмғҒ м •м§ҖмёЎмң„ мӢңн—ҳ
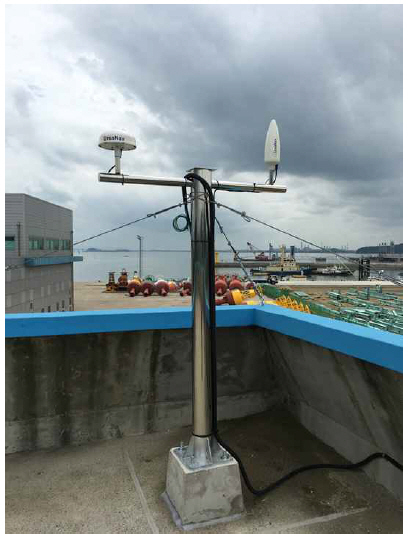
мңЎмғҒ м •м№ҳмёЎмң„ мӢңн—ҳмқҖ 2018л…„ 7мӣ” 11мқј м•Ҫ 12мӢңк°„ лҸҷм•Ҳ нҸү нғқ Loran-C к°җмӢңкөӯм—җм„ң 진н–үлҗҳм—ҲлӢӨ. мӢңн—ҳ мһҘ비лЎң UrsanavмӮ¬ мқҳ UN152B мҲҳмӢ кё°мҷҖ м•Ҳн…ҢлӮҳлҘј мқҙмҡ©н•ҳмҳҖлӢӨ. Fig. 2лҠ” мңЎмғҒ м • м§ҖмёЎмң„ мӢңн—ҳ мҲҳн–ү мһҘмҶҢмқё нҸүнғқ Loran-C к°җмӢңкөӯм—җ м„Өм№ҳлҗң eLoran м•Ҳн…ҢлӮҳмқҙлӢӨ. мӢӨн—ҳм—җлҠ” м•Ҳн…ҢлӮҳ л§ҲмҡҙнҠё мўҢмёЎ H-Field м•Ҳ н…ҢлӮҳк°Җ мқҙмҡ©лҗҳм—ҲлӢӨ. мёЎм •лҗң мң„м№ҳм—җ лҢҖн•ң м •нҷ•лҸ„лҘј нҷ•мқён•ҳкё° м•Ҳн…ҢлӮҳ кё°мӨҖ мң„м№ҳм—җ лҢҖн•ң м •л°Җ мёЎмң„лҘј мҲҳн–үн•ҳмҳҖлӢӨ. Topconмқҳ GRS-1 мһҘ비лҘј мқҙмҡ©н•ҳм—¬ GPS/GLONASS нҶөн•© VRS л°©лІ•мңј лЎң мң„м№ҳлҘј кө¬н•ҳмҳҖлӢӨ. ліҙм •м •ліҙлҠ” көӯнҶ м§ҖлҰ¬м •ліҙмӣҗмқҳ NTRIP м„ң 비мҠӨлҘј мқҙмҡ©н•ҳмҳҖлӢӨ.
лҚ°мқҙн„°лҘј мҲҳ집н•ҳлҠ” лҸҷм•Ҳ GRI7430 мІҙмқёмқҳ M, X, Y мҶЎмӢ көӯ мӢ нҳёмҷҖ GRI8390 мІҙмқёмқҳ M, X, Y мҶЎмӢ көӯ мӢ нҳё к·ёлҰ¬кі GRI9930 мІҙмқёмқҳ M, W, Z мҶЎмӢ көӯ мӢ нҳёлҘј мҲҳмӢ н•ҳмҳҖлӢӨ. мҲҳмӢ лҗң 9к°ң мҶЎмӢ көӯ мӢ нҳё мӨ‘ кё°м Җкұ°лҰ¬к°Җ к°ҖмһҘ лЁј GRI8390 мІҙмқёмқҳ Xкөӯ мӢ нҳёмҷҖ GRI9930 мІҙмқёмқҳ Zкөӯ мӢ нҳёлҠ” н’Ҳм§Ҳмқҙ мўӢм§Җ м•Ҡм•ҳкё° л•Ңл¬ё м—җ мқҙлҘј м ңмҷён•ң 7к°ң мӢ нҳём—җ лҢҖн•ң мёЎм •м№ҳлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳлҠ” мӢңн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. 7к°ң мӢ нҳё мӨ‘ 5пҪһ7к°ң мӢ нҳёлҘј м·Ё н•ҳлҠ” лӘЁл“ мЎ°н•©кіј 4к°ң мӢ нҳёлҘј м·Ён•ҳлҠ” мЎ°н•© мӨ‘ к°Ғ мІҙмқё лі„лЎң 2 к°ң мқҙмғҒмқҳ мӢ нҳёлҘј м·Ён•ҳлҠ” лӘЁл“ мЎ°н•© к·ёлҰ¬кі лӢЁмқј мІҙмқё 3к°ң мӢ нҳёлҘј м·Ён•ҳлҠ” мЎ°н•©мқ„ 추к°Җн•ҳм—¬ мҙқ 37к°ң мЎ°мқҳ мӢ нҳё мЎ°н•©мңјлЎң мң„ м№ҳлҘј мёЎм •н•ҳмҳҖлӢӨ. Table 1мқҖ 37к°ң мЎ° к°Ғк°Ғм—җ мҶҚн•ң мӢ нҳёлҘј лӮҳ нғҖлӮёлӢӨ. 1мЎ°лҠ” 7к°ң мӢ нҳёлҘј м·Ён•ң мЎ°н•©мқҙкі 2мЎ°лҠ” 7430M м ңмҷё лӮҳлЁём§Җ мӢ нҳёлҘј м·Ён•ң мЎ°н•©мқҙлӢӨ.

Table 2лҠ” к°Ғ мЎ°н•©мқҳ мӢ нҳём—җ лҢҖн•ң мёЎм •м№ҳлҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳ лҘј мёЎм •н•ң кІ°кіј HDOP, мң„м№ҳ мҳӨм°ЁмҷҖ м •л°ҖлҸ„лҘј м •лҰ¬н•ң кІғмқҙлӢӨ.

мӢӨн—ҳкІ°кіј н•ҳлӮҳмқҳ мІҙмқём—җ н•ҳлӮҳмқҳ мӢ нҳёл§Ң мқҙмҡ©н•ң кІҪмҡ°лҠ” н•ҙ лӢ№ мӢ нҳёк°Җ м—ҶлҠ” кІҪмҡ°мҷҖ лҸҷмқјн•ң кІ°кіјлҘј ліҙмҳҖлӢӨ. 5, 6, 24 мЎ°лҠ” кіөнҶөм ҒмңјлЎң GRI7430мқҳ 3к°ң мӢ нҳё, GRI9930мқҳ 2к°ң мӢ нҳёлҘј мқҙмҡ© н•ҳмҳҖкі м¶”к°Җм ҒмңјлЎң 5мЎ°лҠ” 8390X, 6мЎ°лҠ” 8390YлҘј мқҙмҡ©н•ҳмҳҖмңј лӮҳ лӘЁл‘җ лҸҷмқјн•ң мң„м№ҳ мҳӨм°ЁмҷҖ м •л°ҖлҸ„лҘј ліҙмқёлӢӨ. мқҙмҷҖ к°ҷмқҖ нҳ„мғҒ мқҖ вҖҳ7, 8, 29вҖҷ, вҖҳ9, 10, 15вҖҷ, вҖҳ11, 12, 31вҖҷ, вҖҳ16, 17, 33вҖҷ, вҖҳ18, 19, 34вҖҷ,
вҖҳ20, 21, 35вҖҷ, вҖҳ22, 23, 36вҖҷ к·ёлҰ¬кі вҖҳ25, 26, 27, 28, 37вҖҷмқҳ кІҪмҡ°м—җ лҸ„ лҸҷмқјн•ҳмҳҖлӢӨ. мқҙлҹ¬н•ң нҳ„мғҒмқҙ л°ңмғқн•ң мқҙмң лҠ” к°Ғ мІҙмқёл§ҲлӢӨ 2 к°ң мқҙмғҒмқҳ мӢ нҳёлҘј мҲҳмӢ н•ҳм—¬м•ј н•ҙлӢ№ мІҙмқём—җ лҢҖн•ң мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ мң мқҳлҜён•ҳкІҢ м¶”м •н•ҳкё° л•Ңл¬ёмқё кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ.
16, 17, 33 мЎ°лҠ” м •нҷ•лҸ„мҷҖ м •л°ҖлҸ„к°Җ лӢӨлҘё мЎ°мқҳ кІ°кіјм—җ 비н•ҳ м—¬ мғҒлҢҖм ҒмңјлЎң нҒ¬кІҢ мёЎм •лҗҳм—ҲлӢӨ. мқҙ кІҪмҡ°лҠ” л‘җ мІҙмқёмңјлЎң к°Ғкё° м¶”м •н•ң мң„м№ҳм„ мқҳ көҗк°Ғмқҙ мһ‘кё° л•Ңл¬ёмқё кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ. ASF ліҙмғҒ мӢң м„ұлҠҘмқҙ н–ҘмғҒлҗ кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ. мӢӨм ң н•ӯн•ҙ мӨ‘м—җлҠ” м„ мң„мқҳ м°ёк°’мқ„ лӘЁлҘҙкё° л•Ңл¬ём—җ мқҙл ҮкІҢ мҳӨм°Ёк°Җ нҒ° мң„м№ҳлҘј м ңкіөн•ҳ л©ҙ мң„н—ҳн• мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ мқҙлҹ¬н•ң кІҪмҡ° мң„м№ҳмқҳ м°ёк°’мқ„ лӘЁлҘҙлҚ” лқјлҸ„ мқҳмӮ¬кұ°лҰ¬ мһ”м°Ёк°Җ л§Өмҡ° нҒ¬кІҢ лӮҳнғҖлӮҳкё° л•Ңл¬ём—җ мқҙлҘј мқҙмҡ© н•ҳм—¬ нҒ° мҳӨм°ЁлҘј нҸ¬н•Ён•ң мң„м№ҳлЎң м„ мң„лҘј кІ°м •н•ҳлҠ” мғҒнҷ©мқ„ н”јн• мҲҳ мһҲлӢӨ. ліё мӢңн—ҳмқҳ кІ°кіјлЎңлҠ” мқҳмӮ¬кұ°лҰ¬ мһ”м°Ёмқҳ м ҲлҢҖк°’мқ„ нҸүк· н•ң к°’мқҙ 1 гҺһлҘј л„ҳлҠ”м§Җ м•„лӢҢм§ҖлҘј к°җмӢңн•ҳлҠ” л°©лІ•мңјлЎң м •нҷ•лҸ„мҷҖ м •л°ҖлҸ„к°Җ мғҒлҢҖм ҒмңјлЎң лӮҳмҒңм§Җмқҳ м—¬л¶ҖлҘј кө¬л¶„н• мҲҳ мһҲм—ҲлӢӨ.
22, 23, 36 мЎ°лҠ” мң„м№ҳмқҳ кІ°м •мқҙ л¶Ҳк°ҖлҠҘн•ҳмҳҖлӢӨ. мӮ¬мҡ©лҗң мӢ нҳё лҠ” 4пҪһ5к°ңмҳҖм§Җл§Ң, мң мқҳлҜён•ң мӢ нҳёлҠ” 7430M, 7430X к·ёлҰ¬кі 8390M, 8390Y мӢ нҳёлЎң 4к°ңмҳҖлӢӨ. к·ёлҹ¬лӮҳ 7430MмҷҖ 8390Y мӢ нҳё лҠ” мӨ‘көӯмқҳ Rongcheng көӯм—җм„ң мҶЎмӢ н•ң мӢ нҳёлЎң мқҙл“Ө мӢ нҳёмқҳ мҶЎ мӢ м§Җм җмқҖ лҸҷмқјн•ҳлӢӨ. лҳҗн•ң 7430XмҷҖ 8390MлҠ” мӨ‘көӯмқҳ Xuancheng көӯм—җм„ң мҶЎмӢ н•ң мӢ нҳёмқҙлӢӨ. мқҙл“Ө мЎ°лҠ” 4к°ңмқҳ мӢ нҳёлҘј мҲҳмӢ н•ҳмҳҖм§Җл§Ң мӢӨм ң мҶЎмӢ көӯмқҙ 2к°ңмҳҖкё° л•Ңл¬ём—җ мң„м№ҳмқҳ мёЎм •мқҙ л¶Ҳк°ҖлҠҘн•ҳмҳҖмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
к·ё мҷё лӘЁл“ мЎ°мқҳ кІ°кіјлҠ” мқјл°ҳм Ғмқё Loran-C мҲҳмӨҖмқҳ мёЎмң„м • нҷ•лҸ„мҷҖ м •л°ҖлҸ„лҘј ліҙмҳҖлӢӨ. мӢ нҳёлҘј 6пҪһ7к°ң мӮ¬мҡ©н•ң кІҪмҡ°мқҳ м •л°Җ лҸ„лҠ” м•Ҫ 15пҪһ19m к·ёлҰ¬кі мӢ нҳёлҘј 4пҪһ5к°ң мӮ¬мҡ©н•ң кІҪмҡ°мқҳ м •л°Җ лҸ„лҠ” м•Ҫ 16пҪһ21mлЎң лӮҳнғҖлӮ¬лӢӨ.
Fig. 3мқҖ GRI7430 мІҙмқёмқҳ M, X, Yкөӯкіј GRI8390 мІҙмқёмқҳ M, Yкөӯ к·ёлҰ¬кі GRI9930мқҳ M, Wкөӯ мӢ нҳём—җ лҢҖн•ң мёЎм •м№ҳлҘј мқҙмҡ© н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ң кІ°кіјлҘј ліҙм—¬мӨҖлӢӨ. мң„м№ҳ мҳӨм°ЁлҠ” м•Ҫ 540.55 m к·ёлҰ¬кі м •л°ҖлҸ„лҠ” 2DRMS 14.76mмқҙлӢӨ.

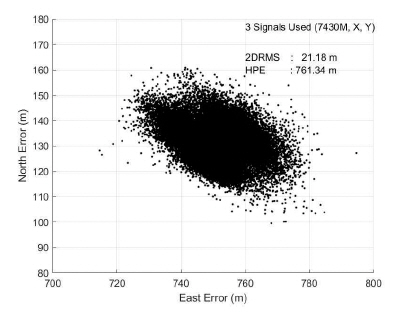
Fig. 4лҠ” GRI7430 мІҙмқёмқҳ M, X, Yкөӯл§Ң мёЎм •м№ҳл§Ңмқ„ мқҙмҡ©н•ҳ м—¬ мң„м№ҳлҘј мёЎм •н•ң кІ°кіјмқҙлӢӨ. мң„м№ҳ мҳӨм°ЁлҠ” м•Ҫ 761.34m, м •л°ҖлҸ„ лҠ” 21.18mмқҙлӢӨ.
3.2 н•ҙмғҒ мқҙлҸҷмёЎмң„ мӢӨн—ҳ
м ңм•Ҳлҗң л°©лІ•мңјлЎң мёЎмң„н•ҳкі к·ё м •нҷ•лҸ„лҘј нҷ•мқён•ҳкё° мң„н•ҙ мқҙ лҸҷмӢқ м•Ҳн…ҢлӮҳ нҢҢнҒ¬лҘј кө¬м„ұн•ҳмҳҖлӢӨ. м•Ҳн…ҢлӮҳ нҢҢнҒ¬м—җ м„Өм№ҳлҗң м—¬лҹ¬ м•Ҳн…ҢлӮҳ л§ҲмҡҙнҠёл“ӨмқҖ м„ңлЎң кі м •мқҙ лҗҳм–ҙмһҲкё° л•Ңл¬ём—җ, м–ҙлҠҗ н•ҳлӮҳ мқҳ м җмқҳ мң„м№ҳлҘј м•Ңкі н—Өл”©мқ„ м•Ңл©ҙ лӢӨлҘё н•ң м җмқҳ мң„м№ҳлҘј м •нҷ• нһҲ кө¬н• мҲҳ мһҲлӢӨ. мқҙ н”Ңлһ«нҸјм—җ м„Өм№ҳлҗң м—¬лҹ¬ м•Ҳн…ҢлӮҳ л§ҲмҡҙнҠё мӨ‘ н•ҳлӮҳм—җ eLoran м•Ҳн…ҢлӮҳлҘј м„Өм№ҳн•ҳкі лҳҗ лӢӨлҘё н•ҳлӮҳм—җлҠ” GNSS м•Ҳн…ҢлӮҳлҘј м„Өм№ҳн•ҳмҳҖлӢӨ. eLoran м•Ҳн…ҢлӮҳлҠ” Loran-C мӢ нҳёлҘј мҲҳмӢ н•ҳм—¬ ToA мёЎм •м№ҳлҘј мҲҳ집н•ҳлҠ”лҚ° мӮ¬мҡ©лҗҳм—ҲлӢӨ. GNSS м•Ҳн…ҢлӮҳлҠ” GPSмҷҖ GLONASS мӣҗмӢңлҚ°мқҙн„°лҘј мҲҳ집н•ҳлҠ”лҚ° мӮ¬мҡ©лҗҳм—ҲлӢӨ. мҲҳ 집лҗң GNSS мӣҗмӢңлҚ°мқҙн„°лҠ” к·јмІҳ мғҒмӢңкё°мӨҖкөӯ 3кіім—җм„ң л„ӨнҠёмӣҢнҒ¬ лЎң м ңкіөн•ҳлҠ” ліҙм •м •ліҙмҷҖ н•Ёк»ҳ RTK л°©мӢқмңјлЎң мң„м№ҳлҘј кі„мӮ°н•ҳ лҠ”лҚ° мӮ¬мҡ©лҗҳм—ҲлӢӨ. мқҙл ҮкІҢ мёЎм •лҗң GNSS RTK мң„м№ҳлҠ” м ңм•Ҳлҗң л°©лІ•мңјлЎң мёЎм •лҗң мң„м№ҳмқҳ м •нҷ•лҸ„лҘј нҷ•мқён•ҳлҠ”лҚ° мӮ¬мҡ©лҗҳм—ҲлӢӨ.
Fig. 5лҠ” м°Ёлҹүм—җ м„Өм№ҳлҗң мқҙлҸҷмӢқ м•Ҳн…ҢлӮҳ нҢҢнҒ¬лҘј лӮҳнғҖлӮёлӢӨ.
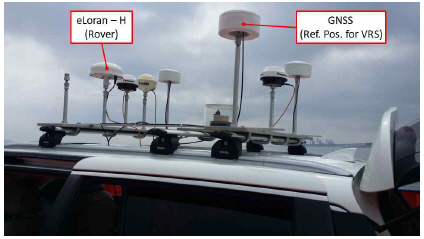
Loran-C мӢ нҳёлҠ” мўҢмёЎ eLoran H-Field м•Ҳн…ҢлӮҳлҘј мқҙмҡ©н•ҳм—¬ мҲҳмӢ н•ҳмҳҖкі мҡ°мёЎ GNSS м•Ҳн…ҢлӮҳлҘј мқҙмҡ©н•ҳм—¬ GPSмҷҖ GLONASS мң„м„ұ мӢ нҳёлҘј мҲҳ집н•ҳмҳҖлӢӨ. кё°мӨҖ мң„м№ҳ нҡҚл“қмқ„ мң„н•ң м•Ҳн…ҢлӮҳ нҢҢнҒ¬лҘј м°Ёлҹүм—җ м„Өм№ҳн•ҳмҳҖкі н•ҙлӢ№ м°Ёлҹүмқ„ Fig. 6кіј к°ҷмқҙ м„ л°•м—җ мӢЈкі мӢӨн—ҳмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. м„ л°• н•ҙмғҒмёЎмң„ мӢӨн—ҳмқҖ 2018 л…„ 7мӣ” 11мқј м•Ҫ 2мӢңк°„ 30분 мҲҳн–үлҗҳм—ҲлӢӨ. мӢӨн—ҳмқҖ м„ л°•мқҳ м¶ңн•ӯкіј н•Ёк»ҳ мӢңмһ‘лҗҳм–ҙ м¶ңн•ӯм§Җ лҸ„비лҸ„н•ӯмңјлЎңл¶Җн„° лҸҷ진н•ҳм—¬ көӯнҷ”лҸ„ мҡ° мёЎ н•ҙмғҒм—җ лҸ„лӢ¬н•ҳм—¬ м„ нҡҢ 1нҡҢм „н•ҳкё°к№Ңм§Җ мҲҳн–үлҗҳм—ҲлӢӨ.
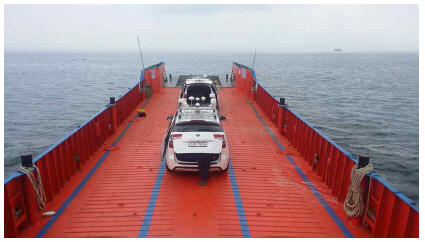
Fig. 7мқҖ м„ л°•мқҳ мқҙлҸҷкІҪлЎңлҘј ліҙм—¬мЈјлҠ”лҚ° н‘ёлҘё м„ мқҖ GNSS RTK л°©лІ•мңјлЎң кө¬н•ң мң„м№ҳлҘј лӮҳнғҖлӮҙкі л¶үмқҖ м җмқҖ Loran-C мӢ нҳёлҘј мҲҳмӢ н•ҳм—¬ м ңм•Ҳлҗң л°©лІ•мңјлЎң кө¬н•ң мң„м№ҳлҘј лӮҳнғҖлӮёлӢӨ. м ңм•Ҳ лҗң л°©лІ•мңјлЎң лӘЁл“ мӢӨн—ҳкө¬к°„м—җм„ң л№ м§җм—Ҷмқҙ мң„м№ҳлҘј мёЎм •н•ҳмҳҖмқҢ мқ„ нҷ•мқён•ҳмҳҖлӢӨ. м„ л°•мқҙ н•ӯн•ҙн•ҳлҠ” лҸҷм•Ҳ мҲҳмӢ мқҙ к°ҖлҠҘн–ҲлҚҳ мӢ нҳё лҠ” лӘЁл‘җ 6к°ңмҳҖлӢӨ. к·ёлҹ¬лӮҳ мҲҳмӢ лҗң мӢ нҳёлҠ” GRI7430 мІҙмқёмқҳ мҶЎмӢ көӯ M, X к·ёлҰ¬кі GRI8390 мІҙмқёмқҳ мҶЎмӢ көӯ M, Y к·ёлҰ¬кі GRI9930 мІҙмқёмқҳ мҶЎмӢ көӯ M, WлЎң 3к°ңмқҳ мІҙмқё мӢ нҳёк°Җ мҲҳмӢ лҗҳм—Ҳ мңјлӮҳ к°Ғ мІҙмқё лі„лЎң 2к°ңм”© мҲҳмӢ лҗҳм—Ҳкё° л•Ңл¬ём—җ кё°мЎҙ Loran-C лӢЁмқј мІҙмқё мёЎмң„ л°©лІ•мңјлЎңлҠ” мң„м№ҳлҘј кө¬н• мҲҳ м—Ҷм—ҲлӢӨ. м ңм•Ҳлҗң л°© лІ•мқҖ мқҙлҹ¬н•ң мғҒнҷ©м—җм„ңлҸ„ мёЎмң„лҘј н• мҲҳ мһҲм—ҲмңјлҜҖлЎң ліё мӢӨн—ҳ кІ° кіјлҠ” к°Җмҡ©м„ұ н–ҘмғҒмқҳ мҳҲмӢңлқј н• мҲҳ мһҲлӢӨ.
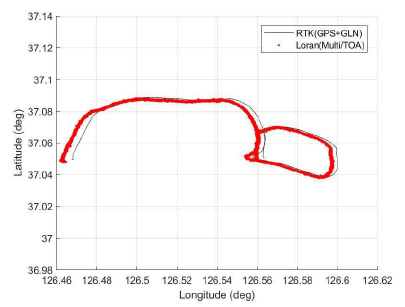
Fig. 8кіј к°ҷмқҙ н•ҙмғҒ мқҙлҸҷмёЎмң„ мӢңн—ҳ кІ°кіј м •нҷ•лҸ„лҠ” 342.76m, м •л°ҖлҸ„лҠ” 2DRMS 184.02mлЎң нҷ•мқёлҗҳм—ҲлӢӨ. м •нҷ•лҸ„лҠ” м •м§ҖмёЎмң„ мӢӨн—ҳмқҳ кІҪмҡ°мҷҖ мң мӮ¬н•ң мҲҳмӨҖмқҙм§Җл§Ң м •л°ҖлҸ„лҠ” м •м§ҖмёЎмң„ мӢӨн—ҳм—җ 비н•ҳм—¬ л§Өмҡ° нҒ¬кІҢ мёЎм •лҗҳм—ҲлҠ”лҚ°, мқҙкІғмқҖ м ңм•Ҳн•ң л°©лІ•мқҙ ASF лҘј ліҙмғҒн•ҳм§Җ м•Ҡкё° л•Ңл¬ёмқё кІғмңјлЎң мӮ¬лЈҢлҗңлӢӨ.
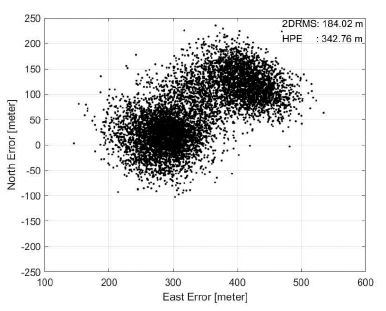
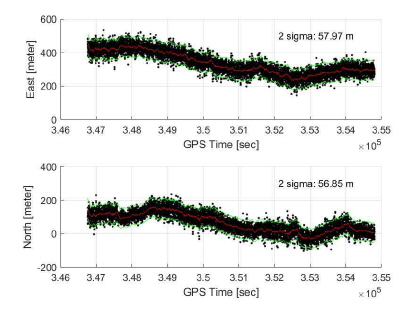
Fig. 9лҠ” мӢңк°„мқҳ нқҗлҰ„м—җ л”°лқј ліҖнҷ”н•ҳлҠ” мң„м№ҳ мҳӨм°ЁлҘј лҸҷмӘҪ л°©н–Ҙкіј л¶ҒмӘҪ л°©н–Ҙ м„ұ분мңјлЎң лӮҳлҲ„м–ҙ лӮҳнғҖлӮё к·ёлҰјмқҙлӢӨ. лҸҷмӘҪ л°© н–ҘмңјлЎңмқҳ мҳӨм°ЁлҠ” мқҙлҸҷ нҸүк· мқ„ кё°мӨҖмңјлЎң 2Пғ 57.97mмқҙкі л¶ҒмӘҪ л°©н–ҘмңјлЎңмқҳ мҳӨм°ЁлҠ” мқҙлҸҷ нҸүк· мқ„ кё°мӨҖмңјлЎң 2Пғ 56.85m мқҙлӢӨ.
4. кІ° лЎ
Loran-CлҠ” мҲҳмӢ лҗң м—¬лҹ¬ мІҙмқё мӨ‘ н•ҳлӮҳмқҳ мІҙмқёмқ„ м„ нғқн•ҳм—¬ н•ҙлӢ№ мІҙмқём—җ мҶҚн•ң мӢ нҳёл§Ңмқ„ мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳлҠ” мӢңмҠӨн…ң мқҙлӢӨ. ліё л…јл¬ём—җм„ңлҠ” мІҙмқёмқ„ кө¬л¶„н•ҳм§Җ м•Ҡкі мҲҳмӢ лҗң лӘЁл“ мӢ нҳё лҘј мқҙмҡ©н•ҳм—¬ мң„м№ҳлҘј мёЎм •н•ҳлҠ” л°©лІ•мқ„ м ңм•Ҳн•ҳмҳҖлӢӨ.
кө¬мІҙм ҒмңјлЎңлҠ” лЁјм Җ, мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқҳ ліҖнҷ”мҷҖ GRIм—җ мқҳн•ң ToA мёЎм •м№ҳмқҳ ліҖнҷ”м—җ лҢҖмқ‘н•ҳлҠ” л°©лІ•мқ„ м„ӨлӘ…н•ҳмҳҖлӢӨ. лӢӨ мқҢмңјлЎң ToA мёЎм •м№ҳм—җм„ң EDмҷҖ PF, SFлҘј ліҙмғҒн•ҳлҠ” л°©лІ•мқ„ м„Ө лӘ…н•ҳмҳҖлӢӨ. л§Ҳм§Җл§үмңјлЎң м—¬лҹ¬ мІҙмқёмқҳ мӢңмҠӨн…ң мӢңм—җ лҢҖн•ң мҲҳмӢ кё° мӢңкі„ мҳӨн”„м…Ӣмқ„ м Ғм ҲнһҲ м ңкұ°н•ЁмңјлЎңмҚЁ Loran-C лӢӨмӨ‘ мІҙмқё мӢ нҳё лҘј мқҙмҡ©н•ң мёЎмң„ л°©лІ•мқ„ м„ӨлӘ…н•ҳмҳҖлӢӨ.
м ңм•Ҳлҗң л°©лІ•мқҳ мң нҡЁм„ұмқ„ нҷ•мқён•ҳкё° мң„н•ң мңЎмғҒ м •м§ҖмёЎмң„ мӢң н—ҳкіј н•ҙмғҒ мқҙлҸҷмёЎмң„ мӢңн—ҳмқ„ мҲҳн–үн•ҳкі к·ё кІ°кіјлҘј м ңмӢңн•ҳмҳҖлӢӨ.
мңЎмғҒ м •м№ҳмёЎмң„ мӢңн—ҳ кІ°кіј м ңм•Ҳн•ҳлҠ” л°©лІ•мңјлЎң мң„м№ҳлҘј мёЎм • н•ҳкё° мң„н•ҙм„ңлҠ” мІҙмқёмқҳ мҲҳм—җ 2лҘј лҚ”н•ң мҲҳ мқҙмғҒмқҳ мҶЎмӢ мӢ нҳём—җ лҢҖн•ң мёЎм •м№ҳлҘј нҷ•ліҙн• мҲҳ мһҲм–ҙм•ј н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ. Loran-C лҠ” Dual мІҙмқёмқҙ мһҲмқҢмқ„ мғҒкё°н•ҳм—¬ мөңмҶҢ 3к°ң мқҙмғҒмқҳ мӢӨм ң мҶЎмӢ көӯмқҙ мһҲм–ҙм•ј н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ. лҳҗн•ң, мғҒнҷ©м—җ л”°лқј мёЎмң„ м •нҷ•лҸ„ н’Ҳм§Ҳмқҙ л§Өмҡ° лӮҳл№ м§Ҳ мҲҳ мһҲкё° л•Ңл¬ём—җ мӢӨм ң н•ӯн•ҙлҘј мң„н•ҙм„ңлҠ” л°ҳ л“ңмӢң мқҳмӮ¬кұ°лҰ¬ мһ”м°ЁлҘј нҷ•мқён•ҳкұ°лӮҳ RAIM л“ұ л°©лІ•мқ„ мқҙмҡ©н•ҳлҠ” кІғмқҙ н•„мҡ”н•Ёмқ„ нҷ•мқён•ҳмҳҖлӢӨ. н•ҙмғҒ мёЎмң„ мӢӨн—ҳмқ„ нҶөн•ҙ мқјл°ҳм Ғмқё Loran-C мҲҳмӢ кё°лҠ” мёЎмң„к°Җ л¶Ҳк°ҖлҠҘн•ң кІҪмҡ°м—җлҸ„ м ңм•Ҳлҗң л°©лІ•мқ„ мқҙмҡ©н•ҙм„ң мёЎмң„лҘј мҲҳн–үн• мҲҳ мһҲмқҢмқ„ нҷ•мқён•ҳмҳҖлӢӨ.
м ңм•Ҳлҗң л°©лІ•мқ„ н•ҙмғҒм—җм„ңмқҳ м„ мң„ кІ°м •м—җ нҷңмҡ©н•ҳл©ҙ лӢЁмқј мІҙ мқё мӢ нҳёлҘј мқҙмҡ©н•ҳлҠ” кІҪмҡ°м—җ 비н•ҳм—¬ ліҙлӢӨ л§ҺмқҖ мӢ нҳёлҘј мӮ¬мҡ©н•Ё мңјлЎңмҚЁ мӮ¬мҡ©мһҗлЎң н•ҳм—¬кёҲ м •нҷ•лҸ„мҷҖ к°Җмҡ©м„ұ мёЎл©ҙм—җм„ң лҚ” мўӢмқҖ м„ұлҠҘмқ„ м ңкіөн• мҲҳ мһҲмқ„ кІғмқҙлӢӨ.
ліё л…јл¬ём—җм„ңлҠ” ASFлҘј ліҙмғҒн•ҳм§ҖлҠ” м•Ҡм•ҳлҠ”лҚ° мқҙ ASFлҠ” мӢ нҳёлҘј мҲҳмӢ н•ҳлҠ” м§Җм—ӯм—җ л”°лқј нҒ° м°ЁмқҙлҘј ліҙмқҙкі кі„м Ҳм—җ л”°лқјм„ң лҸ„ ліҖнҷ”н•ҳлҠ” кІғмңјлЎң м•Ңл Өм ё мһҲлӢӨ. л”°лқјм„ң ліё л…јл¬ём—җм„ң мҲҳн–үлҗң мӢӨн—ҳ кІ°кіјлҠ” м ңм•Ҳлҗң л°©лІ•мқҳ мң нҡЁм„ұ м—¬л¶ҖлҘј нҷ•мқён•ҳкё° мң„н•ң мһҗ лЈҢлЎңм„ңмқҳ мқҳмқҳк°Җ мһҲкі м ңм•Ҳлҗң л°©лІ•мқҳ м •нҷ•лҸ„лҘј нҸүк°Җн•ҳкё°м—җлҠ” л¶ҖмЎұн•ҳлӢӨ. 추нӣ„ лӢӨм–‘н•ң мЎ°кұҙмңјлЎң мӢӨн—ҳмқ„ мҲҳн–үн• н•„мҡ”к°Җ мһҲлӢӨ.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






