퍼지 제어 시스템과 RGB LED 모듈을 이용한 선박 실내용 조명 제어 시스템에 관한 연구
A Study on the Lighting Control System using Fuzzy Control System and RGB Modules in the Ship's Indoor
Article information
Abstract
현재 기존에 상용화 되어 있는 LED 조명기기의 경우, LED 동작 시퀀스가 고정이 되어 있는 상태로 판매되고 있다. 이와 같은 상 태로는 외부 환경 요인이 고려되지 않고 오직 장소에만 적용되는 조명 환경 용도로서의 기능만을 수행한다. 현재는 선박 내 외부 환경 요인의 변화에 따른 최적의 조명 환경 조성이 어렵게 되어있다. 그러므로 외부 환경 요인의 변화에 좀 더 유기적이고 능동적으로 적응할 수 있도록 외부 환경 값을 입력받아 실시간으로 최적 조명 값이 반영될 수 있도록 해야 될 필요성이 있다는 결론을 얻게 되었다. 본 논문에서는 마이크 로프로세서를 선박 통합관리 시스템으로 활용하여 기존의 외부 환경 요인에 의하여 실시간으로 변동되는 환경 데이터를 다루며, 외부 환경 요인을 확인하고 또한 퍼지 추론 시스템을 접목하여 RGB LED 모듈 조명 제어가 가능한 제어기를 구성하였다. 이를 위하여 퍼지 제어 알고리 즘을 설계하고, 퍼지 제어 시스템을 구성하였다. 외부 환경 요소인 피사체와의 거리, 조도 값을 센서로 통해 입력 받고 이 값들을 퍼지 제어 알 고리즘을 통하여 최적 조명 값으로 변환하여 RGB LED 모듈 조광 제어를 통하여 표현하고 퍼지 제어 시스템의 실질적인 효능을 확인하였다.
Trans Abstract
With regard to LED lighting devices which have currently been commercialized, LED operating sequences are being sold in a fixed state. In such a state, the external environmental factors are not taken into consideration as only the illumination environment application is considered. Currently, it is difficult to create an optimal lighting environment which can adapt to changes in external environmental factors in the ship. Therefore, it was concluded that there is a need to input the external environment value so that the optimal illumination value can be reflected in real time in order to adapt more organically and actively to the change of external environmental factors. In this paper, we used a microprocessor as an integrated management system for environmental data that changes in real time according to existing external environmental factors. In addition, a controller capable of lighting control of RGB LED module by combining fuzzy inference system. For this, a fuzzy control algorithm is designed and a fuzzy control system is constructed. The distance and the illuminance value from the external environment element are input to the sensor, and these values are converted to the optimum illumination value through the fuzzy control algorithm, and are expressed through the dimming control of the RGB LED module and the practical effectiveness of the fuzzy control system is confirmed.
1. 서 론
최근 들어 지구 온난화 및 고유가로 인한 에너지 위기로 전 세계적으로 이산화탄소 배출규제가 본격화되고 에너지 소비 에 따른 지구환경을 보존하기 위한 국제적인 GEF(Green Energy Family) 활동은 이산화탄소 배출 금지를 위한 교토의 정서(Kyoto Protocol)와 RoHS(Restriction of Hazardous Substances directive)의 무 수은 조명 사용억제, WEEE (Waste Electrical and Electronice Equipment)의 조명 통신융 합에 따른 폐기물 최소화를 목적으로 한 폐기물 회수 활동 등 다각적 노력을 하고 있다(Oh, 2011).
본 논문에서는 현재 기존의 외부 환경요인인 온도, 습도 등 의 외부 환경 요인은 일반적으로 가장 많이 고려하고 있기 때 문에 본 논문에서는 조도 센서와 초음파 거리센서를 이용하고 실시간으로 거리/조도를 확인할 수 있는 C-LCD(Cholesteric Liquid Crystal:액정표시장치)를 추가하여 RGB LED 모듈 조 명 제어기를 구현하였다. 조도의 경우 민감한 외부 환경 요인 이기 때문에 일반적인 조도계로는 정확한 측정이 어렵다. 그 러므로 일반적인 조명 제어 시스템과 퍼지 제어시스템을 이용 한 결과 값의 명확한 비교가 어렵게 되므로 Matlab 시뮬레이 션을 통하여 결과 값을 비교 분석하였다.
2. 이론적 배경
본 장에서는 논문에서 적용된 이론적 배경을 기술하였다. 첫 번째로 인공지능형 LED 조명 제어기의 필요성, 두 번째로 인공지능 기술 중 하나인 퍼지 이론에 대한 이론적 내용을 기 술하고 세 번째로 선박 통합 관리 시스템에 적용 된 퍼지 제 어 시스템의 구성에 대해 논의 하였다.
2.1 인공지능형 선박용 LED 조명 제어기의 필요성
조명 상황의 활동들은 서로 상이한 특성을 가지고 있다. 특 히나 고립된 선상 생활 도중 많은 인지 부하량과 높은 집중이 요구되는 상황에서의 조명 환경과 휴식, 취침과 같이 요구되 는 집중 및 인지부하가 현저히 낮을 때 사용자에게 적합한 조 명 환경은 분명히 달라야 할 것이다. LED 기술 발달 이전에 는 조명의 색채적 속성들을 제어하기 어려워 다양한 조명 환 경을 구현하기 힘들었지만, LED로 인해 다양한 조명 환경 구 현이 가능해 졌다. 이를 이용하여 이미 많은 업체들이 상황을 고려한 조명 제품 및 시스템을 출시하고 있다(Lee, 2011).
2.2 퍼지 이론 및 제어 시스템의 구성
퍼지 이론은 1965년, 미국 버클리대학의 Lofti Zedeh 교수 가 ‘퍼지집합(FUZZY SET)'이란 논문을 발표하면서부터 시작 되었으며 퍼지 이론은 퍼지 논리를 기초로 하는 이론이며 고 전적인 집합론인 부울 논리를 확장한 개념이다[X]. 부울 논리 를 기본으로 하는 집합이론에서는 특정한 객체가 주어진 집합 의 원소로서 속하거나 속하지 않거나 둘 중의 하나이다. 그러 나 퍼지 논리를 기반으로 하는 퍼지 집합이론에서는 이 객체 가 구성 원소로서 특정 집합 A에 어느 정도로 속하는가 하는 것을 0과 1사이의 수치로써 나타내며 이를 소속의 정도라고 한다. 이것으로 인해 퍼지 논리가 인간의 불확실한 개념을 다 룰 수 있도록 해주며, 물리적인 수치와 양에 대한 인간의 불확 실한 논리적 개념을 정연한 수학적 표현 형태로 나타낼 수 있 다는 특징이 있다(Zurada, 1992).
퍼지이론은 적절한 언어의 값을 정의함으로써 불확실한 느 낌을 그대로 나타낼 수 있다. 아래의 Fig. 1는 기본적인 퍼지 제어기의 구조를 나타내고 있으며, 퍼지 추론을 하기 위해서 는 IF-THEN 형식의 추론 규칙이 필요하며, 이를“퍼지 IF-THEN규칙”이라고 한다.
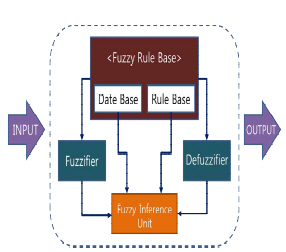
Structure of fuzzy controller
3. 인공지능형 LED 조명 제어기의 구성 및 설계
3.1 퍼지 시스템의 구성
3.1.1 퍼지 언어변수 및 멤버쉽 함수의 설정
각 입출력 변수들의 등급을 5개의 클래스로 나누고 그에 따 라 변수별로 멤버십 함수를 할당하였다. 첫 번째로 조도는 매 우 어둡다, 어둡다, 적당하다, 밝다, 매우 밝다 의 5개의 클래 스로 나누었다. 적당함의 기준은 25 룩스로 설정하고 각 클래 스 당 50 룩스의 범위를 가지도록 하였다. 다음 Fig. 2는 설정 된 조도 멤버십 함수이다.
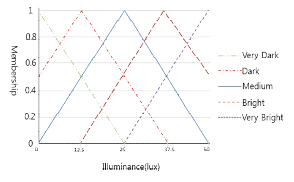
Function of illuminance membership
두 번째로 거리에 관한 언어변수 설정에 따라 거리 값의 범 위를 매우 멀다, 멀다, 적당하다, 가깝다, 매우 가깝다 의 5부 분으로 나누어 퍼지 멤버쉽 함수를 할당하였다. 다음 Fig. 3은 설정된 거리 멤버십 함수이다.
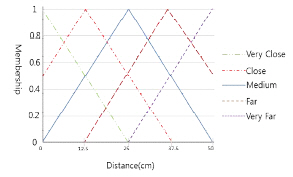
Function of distance membership
여기까지가 입력에 대한 멤버쉽 함수 할당이고, LED 출력 에 관한 언어변수 설정에 따라 LED 출력 값의 범위를 최소, 적음, 보통, 많음, 최대의 5 부분으로 나누어 퍼지 멤버쉽 함수 를 할당 하였다. 퍼지 멤버쉽 함수의 범위는 Fig. 4와 같다.

Function of RGB output membership
위의 RGB LED 출력 퍼지 멤버쉽 함수를 바탕으로 조도입 력과 거리입력에 따른 RGB LED 출력범위를 추가하여 조도, 거리 변화에 따른 일관적인 출력을 낼 수 있도록 하였다. Red, Green, Blue의 LED에 위의 함수 퍼지 멤버쉽을 출력 시 3가 지 색이 혼합 되어 PWM(Pulse Width Modulation) 출력 되어 진다. 위의 RGB 출력을 바탕으로 13가지의 색상이 출력되며, 색상은 RED, YELLOW, GREEN, CYAN, BLUE, PURPLE, LIGHT PINK, ORANGE, GREEN YELLOW, LIGHT CYAN, DODGER BLUE, MAGENTA, VIOLET 색상으로 이 루어져 있다.
3.1.2 퍼지 제어 규칙의 설정
설정한 퍼지 멤버쉽 함수를 바탕으로 아래의 Table 1와 같 이 Fuzzy rules table을 작성하였다.

Fuzzy rule table
위 규칙을 토대로 만드는 관계 함수는 각각 다음과 같이 (식 1), (식 2)로 나타낼 수 있다.
3.1.3 비 퍼지화 과정
앞장에서 계산한 퍼지화 된 수치는 직접 출력(LED Display 의 동작값)으로 사용 할 수 없다. 그러므로 실제로 사용가능한 수치로 변환하기 위해 Defuzzifier(비퍼지화) 과정을 거쳐야 한다. 비퍼지화를 위해서는 여러 방법이 있으나 주로 다음의 (식 3)과 같이 무게중심법(Center of gravity method)으로 구 한다(Jang, 1995)
(식 3)은 규칙 Ri 의 조도 조건을 Ai, 거리 조건을 Bi, Color를 Ci 라 하고, 조건 A, B에 대한 센서의 측정값을 a, b 라고 할 때 비퍼지화 된 결과 c는 LED 색상을 동작시킬 수 있는 실제 출력 값이다.
출력 값인 색상은 RED, Yellow, Green, Cyan, Blue, Purple, Light Pink, Orange, Green Yellow, Light Cyan, Dodger Blue, Magenta, Violet의 13가지 항목으로 나누었으며 각각의 값은 LED 출력의 실제 동작 값이므로 퍼지 값이 아닌 Crisp 값이다.
4. 인공지능형 선박용 LED 조명 제어기의 구현
4.1 LED 조명 제어기의 하드웨어 구성
하드웨어의 구성은 입력변수인 조도와 거리의 입력을 수신 하는 입력부와 이를 처리하여 퍼지 연산을 수행하는 AVR 제 어부, 퍼지연산 결과 값의 출력을 표현하기 위한 LED 제어부 와 CLCD 출력부, 220VAC 전원을 LED 조명 시스템에 맞게 12VDC로 변환하여 LED 모듈 및 제어기에 전원을 인가시켜 주는 SMPS, 12VDC 전원을 LED 제어보드에서 사용하게 해 주는 5VDC 변환하여 주는 전원부로 구성되어 있다. 아래의 Fig. 5는 LED 조명 제어기의 시스템 블록도 이다.

Block diagram of LED lighting system
4.2 LED 조명 제어기의 각 부 구조 및 기능
4.2.1 전원부
LED 조명 제어보드에 전원을 인가하기 위하여 정격 입력 전력이 30W인 SMPS를 사용하였다. SMPS는 Switching mode power supply의 약자이며, 전력용 트랜지스터 등의 IC 소자를 이용하여 직류 전압을 구형파 형태의 전압으로 변환하 고 필터를 이용하여 평활화 작업을 거친 후 직류전압을 출력 하는 장치이다. 이때 직류 출력 전압은 스위치의 ON, OFF 딜 레이를 제어함으로써 이루어진다. 제어보드에서 사용되는 최 대 전압은 12VDC 이므로 220VAC를 12VDC로 변환 시켜주 는 AC/DC 컨버터를 사용하였다. 30W용량의 SMPS는 비교적 작은 용량이므로 다수의 RGB LED를 동시에 제어하기에 부 족함이 있다고 판단하여, RGB LED Module 4구 모델을 기준 으로 2개의 RGB LED만을 사용하였다. SMPS의 용량이 200W 이상일 경우 최대 200여개의 RGB LED를 제어할 수 있 다. 초음파 거리 센서, 조도 센서, ATmega128 MCU, CLCD의 경우 Typical 전압이 5VDC 이므로 전압강하 소자인 Bipolar linear IC KIA7805를 이용하여 전압을 낮춰서 공급하였다. RGB DRIVE부의 경우 12VDC를 사용하므로 SMPS에서 입력 되는 전압을 BYPASS 시켜줌으로써 조명 제어보드의 전원 구성부를 간단하게 설계하였다.
4.2.2 MCU 제어부
본 시스템의 MCU는 Atmel사 의 8비트 RISC 마이크로 컨 트롤러인 ATmega128 모델을 사용하였으며 AVR제어부에서 는 조도센서와 거리센서의 ADC 값을 받아서 실제로 각 RGB LED Module의 색상을 제어하는 역할을 한다. RGB LED DRIVE의 색상 제어는 기본적으로 타이머/카운터 기능을 통 해 이루어진다. 이 기능을 활용하여 PWM(Pulse Width Modulation) 출력을 만들어서 Red, Green, Blue의 휘도 비율 을 조절한다. 타이머/카운터에서도 16비트 카운터인 타이머/ 카운터1을 쓰고 FAST PWM, CTC모드 등 여러 가지 모드가 있는데 그 중에서도 CTC 모드를 사용하였다. CTC 모드 (Clear Timer on Compare Match)는 카운팅을 하면서 OCR값 (Output Compare Register)과 계속적으로 비교하여 카운팅 값과 OCR 값이 같아지면 매칭 신호를 출력하고 이로 인해 파 형 발생기로 펄스 파형을 출력하게 된다.
4.2.3 CLCD 출력부
LCD는 16x4 Line의 일반적인 CLCD(Character LCD)를 사 용하였다. CLCD를 통하여 현재 출력되는 Red, Green, Blue의 PWM 값을 실시간으로 확인이 가능하게 구현했으며, 동시에 실제 거리 및 현재 밝기 또한 확인할 수 있도록 하였다.
4.2.4 센서 입력부
조도 센서는 황화카드뮴을 사용한 경우 CdS 센서라고 하 며, 보통 밝기에 비례하여 저항이 선형적으로 증가하는 것이 아니라 Log 그래프에 가까운 형태를 띠기 때문에 정확한 Lux 값을 구하기보다는 밝다, 어둡다 의 정도만 판별하기에 적합 한 센서이다. 본 논문에서는 세밀하고 선형적인 Lux 값의 입 력보다 퍼지 추론에 적합한 CdS 센서를 선택하였다.
거리 센서는 Parallax사의 SRF04 초음파 거리 측정 센서를 사용하였다. 초음파 센서는 공기 중에 340m/s 속도의 음파를 발산하여, 피사체에 부딪혀 반사되는 음파를 수신하여 거리를 측정하는 방식의 센서이다. 트리거에서 10us 이상의 펄스폭을 가지는 파형을 발산하면 공기 중으로 떠났다가 피사체에 부딪 혀 돌아온 초음파로 시간을 계산하고 그 결과로 나온 거리 값 을 에코 펄스로 나타낸다. 예를 들면, 거리가 멀면 멀수록 에 코 펄스의 펄스폭은 커진다. 즉, 거리에 따라 펄스의 폭이 변 화한다. 이러한 펄스폭을 MCU의 타이머로 정확하게 측정하 여 거리를 측정한다.
4.2.5 LED 제어부
연산 결과값을 RGB 색상으로 내주는 LED RGB module은 RGB LED 4구 모듈을 사용하였다. MCU에서 출력되는 값은 TTL 전압 레벨인 5VDC이므로 LED RGB module을 구동 시 킬 수 없다. LED RGB module의 구동전압은 12VDC로 전원 부인 SMPS부에서 직접 인가를 한다. MCU에서 나오는 값인 High, Low 5VDC 출력은 MOSFET의 게이트로 연결되어 LED RGB module을 ON-OFF 스위칭 하는 역할을 한다. 게 이트단의 신호에 따라 module에 전원을 인가하여 색상을 표 현하게 된다.
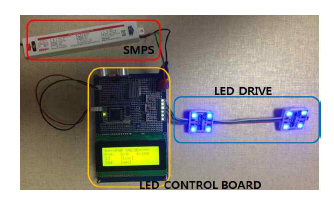
4.3 실험 및 결과
피사체에 따른 LED 조명의 출력 상태를 확인하기 위하여, 1개의 채널에 12VDC 4구 LED 모듈 2개를 연결하고 220VDC 를 12VDC로 변환시키기 위한 SMPS와 LED CONTROL BOARD를 연결하여 구성하였다. SMPS의 용량은 30W이며 초음파 거리센서의 ADC 입력 값과 연산식에 따른 CLCD 출 력 거리 값과 실제 거리가 일치 하는지 확인하였다. 또한, 조 도센서의 ADC 입력 값과 연산 식에 따른 CLCD 출력 조도 값과 실제 조도가 일치 하는지 확인 한 후, 거리와 조도 값에 따른 LED의 색상 변화를 관찰하여 MATLAB 시뮬레이션 결 과와 비교하였다.
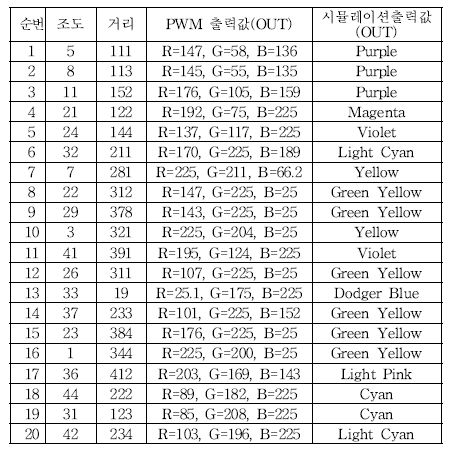
Table 2는 Fuzzy Rule 기반의 임의의 조도 및 거리 입력 값을 MATLAB 시뮬레이션을 통하여 도출 되어진 결과 값이 다. 아래의 Table 2를 통하여 Fuzzy Rule 임의의 사이 값의 입력에 대한 출력을 확인할 수 있었다.

RGB Fuzzy output result according to input of arbitrary illumination and distance value
비퍼지화 및 결과는 무게중심법(Center of gravity method) 을 이용하여 MATLAB 시뮬레이션을 진행하였다. 위의 Fig. 7 과 Fig. 8는 각각 임의의 사이 값인 조도 42 lux와 거리 23.4cm인 센서 입력의 경우와 조도 5 lux와 거리 11.1cm인 센 서 입력인 경우의 Matlab 시뮬레이션 퍼지 연산 결과 그래프 이다. Table 2의 순번 1과 순번 20에 해당한다. Fig. 6
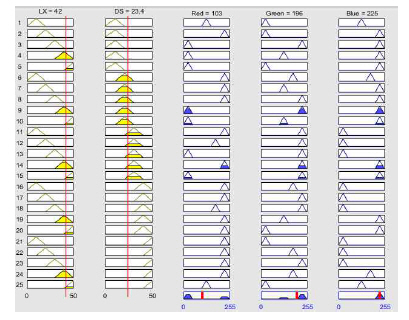
Simulation result for 42Lux and 234mm
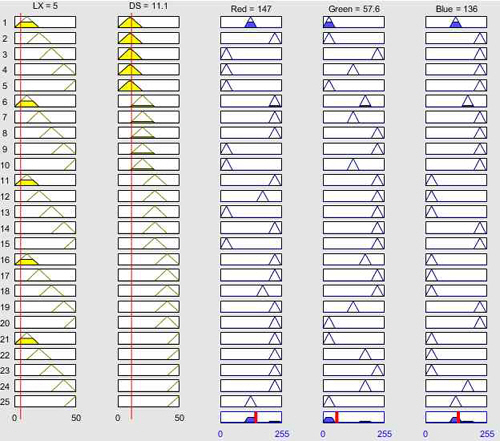
Simulation result for 5Lux and 111mm
Configuration of ATmega128 LED lighting controller
6. 결 론
실험과 결과를 통하여 퍼지 이론을 이용할 경우 일반적인 시스템을 이용한 제어기보다 적절한 규칙 베이스를 구성한 퍼 지 제어 시스템이 기존의 제어기에 비해 애매한 입력 값이 들 어왔을 때 좀 더 능동적이고 직관적인 출력이 가능함을 실험 결과를 통하여 확인 할 수 있었다. 또한 본 논문에서 제작한 RGB LED 모듈 제어 시스템을 선박 실내 조명 시스템 및 사 용자 환경 등에 연계하여 조명의 색상 및 휘도의 정도 등을 자동적으로 제어할 수 있다면 선박 내 선원에게 큰 도움이 될 것은 자명하다. 그리고 4차 산업 혁명의 핵심기술 중 하나인 퍼지 제어 시스템의 구성을 통한 인공지능을 이용하여 조명 LED의 유기적이고 능동적인 조명 서비스를 제공하고 인간의 개입을 최소화 한 완벽한 선박 자동화 시스템의 도입에 일조 할 것이다. 이러한 LED 조명 시스템에 퍼지 추론을 통한 제 어기를 구성하고 본 논문에서 제작한 LED 조명 제어기에 적 용한 결과, 실제로도 적용하여 사용할 수 있다는 결과를 얻었 다. 하지만 퍼지 제어 시스템뿐만 아니라 센서 네트워크 와 빅 데이터를 융합한 완전한 선박용 IoT 스마트 기술을 구현하려 면 아직까지 많은 연구와 투자가 필요한 실정이다.
최근 정부에서는 알파고 사건의 충격으로 인해 제4차 산업 혁명을 주도할 플랜을 연내에 수립하겠다고 발표했다. 독일은 이미 2011년에 ‘하이테크 비전 2020’에 ICT 융합을 통한 제조 업 창조 경제 전략인 인더스트리 4.0 전략을 수립하고 강도 높 게 추진 중 이다(Park, 2016). 본 논문에서 사용한 MCU인 ATmega128 보다, 진보된 TI(Texas Instruments)사의 저전력 MSP432 MCU를 사용한다면, 최근에 대두되고 있는 머신러닝 의 기술과 퍼지이론의 접목을 통하여 극대화된 성능을 이끌어 낼 수 있을 것이다.