러시아의 GLONASS 항법 파라미터 및 성능 분석
Analysis of Navigation Parameter and Performance Regarding the Russian GLONASS
Article information
Abstract
러시아의 위성항법시스템인 GLONASS(GLObal NAvigation Satellite System)는 2011년 10월 이후 정상적으로 재가동되었으며 지 속적으로 시스템 구성이 현대화되고 있다. 최근 2017년 10월 16일 발사된 GLONASS 752 위성(GLONASS-M)이 정상 작동됨에 따라서 2세 대 위성인 GLONASS-M 22기와 3세대 위성인 GLONASS-K 1기로 총 24기 위성이 구축되었다. 따라서 본 논문은 현재의 GLONASS 위성 항법시스템의 항법위성으로부터 실데이터를 수신하여 항법파라미터 특성 및 성능을 분석하고자 하였다. 수신된 데이터를 분석한 결과 항상 항법위성 5~11기가 동시에 가시선상에 있어서 항법신호를 수신할 수 있음을 확인하였으며, 실험에 이용된 위성들의 DOP(Dilution of Position)는 GDOP, PDOP, HDOP, VDOP, TDOP 각각 2.790, 2.424, 1.169, 2.123, 1.381을 얻었다. 또한 수신된 데이터의 위치 정밀도를 분석 한 결과 표준편차 1.4m로 매우 우수하였다. 결과적으로 GLONASS와 GPS(Global Positioning System)는 성능이 거의 동일하며 향후 GLONASS 시스템의 이용 확대가 기대된다.
Trans Abstract
The Russian Global Navigation Satellite System (GLONASS) has been fully recovered since October 2011, and it has been significantly modernized. The recently launched GLONASS 752 was set for successful performance on October 16, 2017 and has resulted in 24-satellite constellation with 22 second-generation (GLONASS-M) satellites, and a third-generation (GLONASS-K) satellite. Therefore, this paper is focused on not only the identified navigation parameters, but also the performance analysis of the project based on its real data received from the studied satellites. It is verified that the 5-11 satellites are available for receiving navigation signal at this time. The obtained values of GDOP, PDOP, HDOP, VDOP, and TDOP are 2.790, 2.424, 1.169, 2.123, and 1.381, noted respectively in standard deviation. In fact, the level of positioning precision is about 1.4m in standard deviation. As a result, the positioning performances of the measured GLONASS and GPS are virtually identical. Therefore, we determine that the GLONASS is expected to be expanded for future applications.
1. 서 론
전 세계적 위성항법시스템인 GNSS(Global Navigation Satellite System)는 항법위성으로부터 발사되는 항법정보로 부터 위치정보를 산출하는 방식으로 미국의 GPS(Global Positioning System), 러시아의 GLONASS(GLObal NAvigation Satellite System), 중국의 BeiDou(COMPASS) EU의 GALILEO(GPS Website, 2018; GLONASS Website, 2018; Beidou Website, 2017; Galileo Website, 2017; Choi, 2015) 등이 있으나 지금까지 세계적 위성항법시스템으로 완벽하게 운용 중인 시스템은 미국의 GPS와 러시아의 GLONASS 뿐이다 (Choi, 2015). 그러나 GPS가 전세계적으로 보편화되어 사용되 고 있는 것에 비해 GLONASS는 그 사용자가 아직까지 매우 미미한 수준이다.
GLONASS는 GPS와 비슷한 시기에 개발이 시작되어 1996 년 전면 운용을 선언하였으나 구소련의 붕괴이후 재정적인 문 제로 쇠퇴하였다가 2003년 이후 위성항법 현대화 정책을 추진 하여 2012부터 완전한 서비스를 제공하고 있다. 그리고 2012 년부터는 2차 현대화 정책을 추진 중에 있으며, 2017년 9월 22 일 쏘아 올린 GLONASS-752(GLONASS-M) 위성이 10월 16 일 전면 작동하면서 24개 위성을 다시 갖추어 운용 중이다 (Langley, 2017).
또한 2018년 이후에는 GLONASS-K2 위성이 테스트를 거 쳐 발사될 예정이며, 이 유형의 위성부터 L1, L2 주파수에 대 하여 CDMA(Code Division Multiple Access) 방식의 신호 (Langley and Wikipedia, 2017)를 송출할 예정이어서 모든 위 성이 작동하는 2025년 이후에는 GNSS들과 통합 운용이 더욱 용이할 것으로 판단된다.
GPS가 완전가동 이후 1995년부터 현대화 정책을 추진하며 오늘에 이르고 있으며, GALILEO와 BeiDou가 세계적인 항법 시스템으로 구축 중에 있는 것에 반해 GLONASS는 위와 같 은 발전계획으로 추진하여 벌써 완전가동하고 있음에도 불구 하고 GPS 사용자 증가 대비 너무나도 미미한 수준이다.
따라서 본 논문에서는 러시아의 GLONASS 시스템에 대하 여 전반적으로 분석하고 위성으로부터 수신되는 항법파라미 터 및 성능을 분석함으로써 현재의 GLONASS 시스템을 정확 하게 진단하여 향후 GPS에 대한 의존도를 낮추고 GNSS 통 합항법시스템 구축에 대한 토대를 마련하고자 한다.
2. GLONASS 시스템 운용 및 현대화 추진 분석
2.1. 시스템 개요
GLONASS 시스템은 러시아에서 운용하는 위성항법시스템 이다. 구 소련이 최초의 인공위성 스푸트니크 1호를 1957년 10월 쏘아올린 이래로 우주산업에 박차를 가하여 ”Tsikada" 위성항법시스템을 개발한 이후 GLONASS 개발을 위한 계획 을 1976년 공식적으로 승인하였다.
구 소련은 승인된 GLONASS 계획에 따라 1982년부터 1995년까지 실험위성을 포함하여 수십기의 위성을 발사하여 GLONASS 시스템을 구축하였으나 구 소련의 붕괴로 시스템 을 러시아가 승계하였지만 재정적 문제로 인하여 시스템 개발 이 일시 중단되어 2001년에는 6개 위성만이 운용되었을 정도 록 방치되었다.
러시아는 2001년 8월 GLONASS를 2011년까지 완성하겠다 는 계획을 발표하였고 2007년 러시아의 푸틴 대통령은 GLONASS를 민간에 무료로 어떠한 제한 없이 사용할 수 있 도록 하는 문서에 공식 서명하였다. 러시아는 계획에 따라 2011년 말까지 24기 위성을 모두 구축함으로써 새로운 위성항 법 시대를 열었을 뿐만 아니라 2012년부터 2020년까지 현대화 정책을 수립하고 추진 중이다(Choi, 2017).
2.2. 시스템 구성과 운용 특성
GLONASS는 러시아 국방성에 의해 운영되며 시스템 구성 은 Fig. 1과 같이 위성부분, 지상국부분, 사용자부분으로 구성 된다.
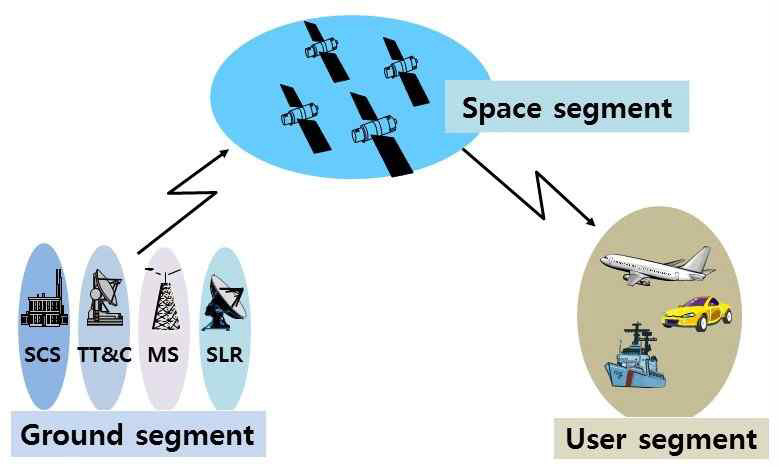
GLONASS segments
위성부분은 3개의 궤도에 8기의 위성으로 총 24기의 위성 으로 구성되며, 각 위성들은 64.8도의 궤도 경사각을 가지고 고도 19,100km 상공에서 11시간 15분을 주기로 작동한다. 위 성의 세부사항은 Table 1과 같으며, 위성 궤도정보(Russian Space Website, 2018)는 Fig. 2에 나타내었다.

GLONASS configures
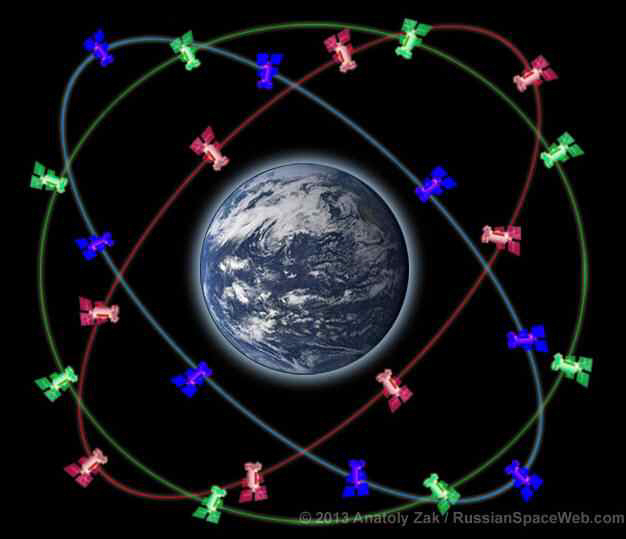
GLONASS constellation
Source : Russian Space Website, http://www.russianspaceweb.com
지상국부분은 주통제국 및 관제소로 구성되어 러시아 각지 에 구축되었으며 이들은 이페머리스, 시각정보 및 기타 데이터 를 위성에 보내고 위성을 추적하고 제어하는 역할을 수행한다.
GLONASS는 GPS와 매우 비슷한 시스템으로써 위성으로 부터 송신되는 PN코드(의사잡음코드)와 수신기에서 발생하는 같은 코드의 상관을 취하여 의사거리를 측정한다. 4개의 위성 으로부터 의사거리를 측정하여 3차원 위치를 구하는 것으로 그 원리는 GPS와 같다.
GPS가 CDMA 방식을 사용하는 것과 대조적으로 GLONASS 는 FDMA(Frequency Division Multiple Access) 방식인 동일 한 코드신호를 이용하면서 주파수를 위성별 달리 사용하는 방 식을 이용하고 있다. FDMA 방식은 여러 주파수를 사용하며, 채널 간섭에 영향을 줄 수 있어서 단점을 많이 가지고 있지만 적이나 특정 단체의 의도적인 협대역 간섭을 받을 경우 GPS 대비 더 강건한 상태를 유지할 수도 있다.
GLONASS는 L1, L2 반송파 주파수를 다음과 같은 식에 의해 위성별 할당하게 된다.
여기서, K는 -7 ~ 6 사이의 정수치이며, Z는 L1이 9, L2 는 7이다. 적도를 중심으로 북반구 12기 위성과 남반구 12기 위성들은 대칭모드로 동일한 주파수를 사용하고 있다. 인접 주파수 사이의 간격은 L1이 0.5625 MHz, L2는 0.4375 MHz 이다. 원래 K는 0 ~ 24까지 할당 받도록 되어 있었으나 간섭 문제로 1998년 이전에는 0 ~ 12, 1998-2005은 -7 ~ 12, 2005 년 이후는 -7 ~ 6을 이용하고 있다(Kaplan, 2005).
GLONASS는 GPS와 같이 표준정밀도채널(CSA: Channel of Standard Accuracy)과 고정밀도채널(CHA: Channel of High Accuracy)의 두 가지 레벨의 서비스가 있으며 고정밀도 채널을 이용한 서비스는 군사용으로 사용한다.
2.3. 현대화 추진
구소련 붕괴이후 러시아의 재정문제로 시스템이 완전한 임 무수행이 불가능하였으나 2002년 현대화 정책 발표이후 2011 년까지 러시아 지역에 완벽한 서비스를 달성하였으며, 2011년 10월까지 24기 위성을 구축하여 글로벌한 위성항법시스템으 로 재탄생되었다(Li, 2015).
2012년 승인된 새로운 현대화 계획은 2012-2020까지 성능 향상을 위한 위성 대체 및 신호체계 변경, 지상 기지국 확대 등 이다(Russian FSA, 2012).
위성부분은 구축된 GLONASS 위성을 대체하기 위해 GLONASS-M, GLONASS-K 순으로 발사될 예정이다. GLONASS-K1은 2011년부터 발사되었으며, GLONASS-K2 는 당초계획대비 지연되어 2019년부터 발사되어 2024년까지 발사될 예정이며 2025년부터는 차세대 위성인 GLONASS-KM 이 이를 대체할 것이다(Wikipedia, 2017).
신호체계는 Table 2처럼 현재의 L1, L2 밴드에 L3 밴드가 추가되며 FDMA 방식에 추가하여 CDMA 방식을 도입 예정 이다. GLONASS-K1 위성부터 L3밴드 CDMA 서비스 시작으 로 GLONASS-K2 위성에서는 L1, L2, L3 모두 CDMA 서비 스를 시작할 예정이며(Urlichich, 2011), 2025년경이 되어야 모 두 완료될 것으로 판단된다.

Roadmap of GLONASS configures
지상국부분은 정밀도 향상을 위하여 위성항법보정시스템과 해외 모니터링 시스템을 구축하기 시작하였다. 현재 러시아에 14개의 지상 기지국을 구축함은 물론, 남극 및 브라질 등에도 기지국을 구축하였다. 추가적으로 러시아에 8개 기지국 및 쿠 바, 베트남, 오스트레일리아 등 여러 개의 해외 기지국을 구축 하여 36개의 나라에 50개 이상의 새로운 기지국을 구축할 계 획이다(GPS world staff, 2017; Russian Aviation news, 2014).
3. GLONASS 항법파라미터 및 성능 분석 결과
3.1. 실험 환경 및 방법
실험에 사용된 GNSS 수신기는 NovAtel ProPak6(멀티 위 성항법 수신기, L1/L2/L5 수신 가능)이며, 우리나라의 남부지 방인 경남 창원 연구실(위도 37° 07.6790′N, 경도 128° 39.9645′E, 고도 41.1m)에서 데이터를 수신하여 분석하였다.
2018년 1월 3일 현재, GLONASS에서 사용 가능한 위성 신 호는 Table 3과 같이 총 24기 위성 신호이다(IACPNT, 2018).

GLONASS operational satellites
데이터 분석 결과의 신뢰도를 확인하고자 현재 완벽하게 운용 중인 미국의 GPS 시스템의 동일 데이터 성능과 비교하 여 분석하였다.
먼저, 수신지역의 가시영역에서 이용 가능한 위성의 현황을 분석하고 각각의 위성들의 수신 신호에 대한 항법파라미터를 분석하였으며, 수신 위성의 DOP (Dilution of Position) 및 위 치 정밀도 등을 분석하였다.
분석에 사용된 소프트웨어는 Novatel connect 프로그램과 Excel, Origin이며, 이를 이용하여 통계적 분석을 하였다.
3.2. 실험결과 및 분석
GLONASS 위성으로부터 24시간 동시 수신 가능한 위성 수를 Fig. 3에 나타내었다. 24기 위성 중 동시에 최소 5기 위 성, 최대 11기 위성으로부터 신호가 수신되었으며, 평균 8기 위성으로부터 신호가 수신되었다. 일반적으로 4기 위성으로부 터 신호만 수신하면 3차원 위치 결정이 가능하기 때문에 24시 간 위치 측정이 가능하였다. 그러나 가시영역에서 건물이나 산악으로 인하여 여분의 위성이 필요함을 감안할 때 기본 6기 이상의 위성으로 설정할 경우, 위성 5기가 수신되는 시간인 하루 중 33분 동안은 다소 제한이 될 수 있음이 식별되었다.

Satellite number of GLONASS
본 논문은 위치 측정 시 가시영역이 오픈된 구역으로 설정 하여 실험을 하였다. 실시간 데이터 수집에 사용된 위성은 PRN 43, 44, 45, 46, 53, 58, 59, 60, 총 8기 위성이다. 위성의 신호 수신 상태가 정상적으로 이루어지고 사용 가능 위성이 충분하여 3차원 위치결정이 가능하였다.
신호가 수신되는 8기 위성의 위치는 Fig. 4에 나타내었다. 각각의 위성으로부터 수신되는 신호는 L1 –160dBW, L2 –166dBW수준으로 매우 미약하며, 수신기에서 신호 분석 시 는 반송파 신호대 잡음비인 C/No비(Carrier/Noise Ratio)를 이용하게 된다. C/No비는 1Hz 밴드 폭에서 반송파 신호대 잡 음비로 수신기에 위성신호가 수신되는 지표로 활용된다.

Sky view of GLONASS
일반적으로 C/No비는 45dBHz이상은 우수, 35~45dBHz 는 보통, 35dBHz이하는 미흡으로 표현한다(Novatel, 2017).
GLONASS 위성으로부터 수신되는 C/No비를 Fig. 5(a)에 나타내었으며, GPS 신호의 C/No비와 비교하기 위해 GPS 위성 으로부터 수신되는 신호의 C/No비를 Fig. 5(b)에 나타내었다.
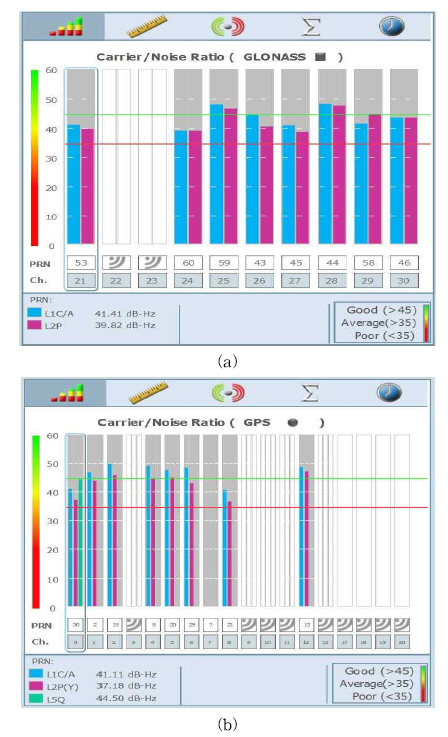
Signal characteristics by (a) GLONASS and (b) GPS
GLONASS의 경우, 2기의 위성으로부터는 45dBHz이상의 매우 강한 신호가 수신되었으며, 6기의 위성으로부터는 35~ 45dBHz의 보통의 신호가 수신되었다. Fig. 5(b)의 GPS 신호 의 C/No비와 비교해도 손색이 없었다.
위치결정에 사용된 위성의 DOP를 분석한 결과를 Fig. 6에 나타내었다. GLONASS의 경우, GDOP(Geometrical DOP)는 2.790, PDOP(Position DOP)는 2.424, VDOP(Vertical DOP)는 2.123, HDOP(Horizontal DOP)는 1.0169, TDOP(Time DOP) 는 1.381이며, GPS의 경우, GDOP는 2.376, PDOP는 2.038, VDOP는 1.729, HDOP 1.079, TDOP는 1.222이다. GLONASS 의 DOP가 GPS DOP 대비 미세한 차이는 있지만 위치 정밀 도에 영향을 미치지 않을 정도로 대동소이하였다.
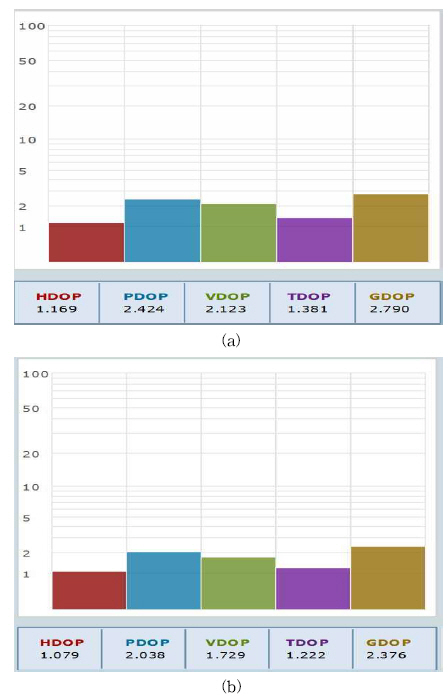
DOP results by (a) GLONASS and (b) GPS
GLONASS와 GPS의 위도 신호 변화를 Fig. 7에 나타내었 다. GLONASS는 평균값이 37° 07.67953′N, 표준편차 1.25m 이며, GPS는 평균값이 37° 07.67979′N, 표준편차 0.26m이다. 두 위성항법시스템의 평균값 차이를 거리단위로 환산하면 0.47m로 거의 동일하였다.
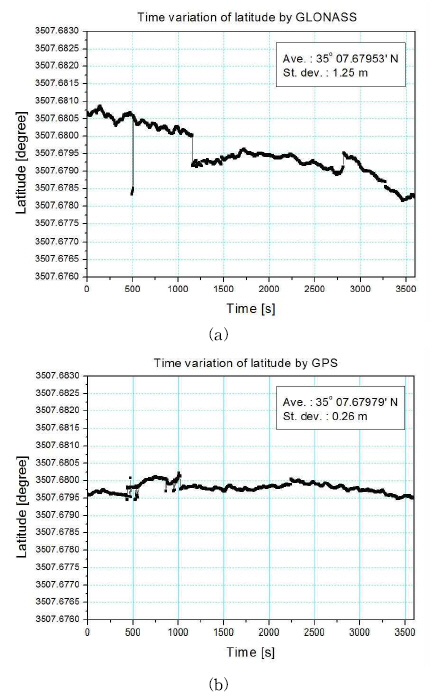
Time variation of latitude by (a) GLONASS and (b) GPS
GLONASS와 GPS의 경도 신호 변화를 Fig. 8에 나타내었 다. GLONASS는 평균값이 128° 39.96360′E, 표준편차 0.75m 이며, GPS는 평균값이 128° 39.96403′N, 표준편차 0.47m이 다. 두 위성항법시스템의 평균값 차이를 거리로 환산하면 0.79m로 거의 동일하였다.
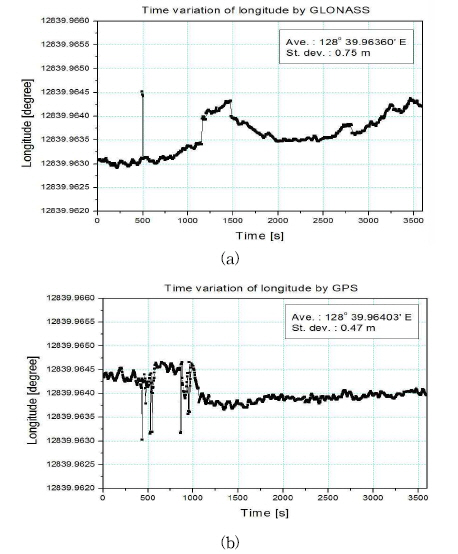
Time variation of longitude by (a) GLONASS and (b) GPS
GLONASS와 GPS의 고도 신호 변화를 MSL(Mean Sea Level)로부터 측정하여 Fig. 9에 나타내었다. GLONASS는 평균값이 46.43m, 표준편차 1.88m이며, GPS는 평균값이 41.43m, 표준편차 1.44m이다. 두 위성항법시스템의 평균값 차 이는 5m로 다소 큰 차이를 보였다. 이것은 위성고도 차이와 좌표체계 등에서 기인된 것으로 판단되며, Fig. 6에서 보이듯 HDOP와 VDOP가 차이가 다소 있음을 알 수 있었다.
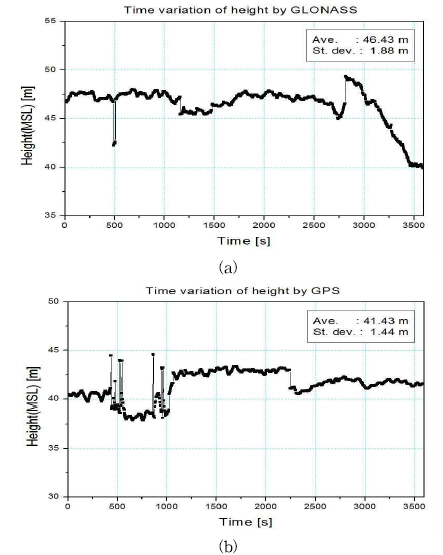
Time variation of height by (a) GLONASS and (b) GPS
GLONASS와 GPS의 위치 신호 변화를 Fig. 10에 나타내었 다. GLONASS는 위치 평균값이 37° 07.67953′N, 128° 39.96360′E이며, 표준편차 1.46m이다. GPS는 평균값이 37° 07.67979′N, 128° 39.96403′E 표준편차 0.54m이다. 데이터 비교 시 GLONASS보다 GPS가 약간 정밀한 것으로 판단되나 그 차이는 미미함을 확인하였다.

Result of positioning deviation by (a) GLONASS and (b) GPS
4. 결 론
본 논문은 범용의 GNSS 항법정보 이용 통합 수신기 개발 을 위한 선행연구로써 정상적으로 작동 중인 GLONASS의 항 법 파라미터와 성능을 분석하여 세계적으로 GPS에 대한 의존 도를 낮추고 향후 통합 수신기 운용을 위한 토대를 마련하고 자 하였다.
실험 시 위성항법시스템의 주요 평가요소인 가시성, 정확 성, 신뢰도 등에 중점을 두고 수신에 이용할 수 있는 실시간 보여지는 위성 현황 및 신호 강도비를 분석하였으며, 실제 항 법신호를 수신하여 통계적으로 정밀도를 분석하여 다음과 같 은 결과를 도출하였다.
첫째, GLONASS는 하루 24시간 동안 최소 5기, 최대 11기 위성으로부터 항법신호를 수신하여 정상적으로 3차원 위치측 정이 가능하였다.
둘째, 수신되는 위성 신호로부터 C/No비는 모두 35dBHz 이상으로 보통 또는 우수한 수준이었다.
셋째, 위성의 DOP를 분석한 결과, GDOP 2.790, PDOP 2.424, VDOP 2.123, HDOP 1.169, TDOP 1.381로 GPS와 대동 소이하였다.
넷째, 위도, 경도, 고도, 위치 변화를 분석한 결과, 위도 변 화는 표준편차 1.25m, 경도 변화는 표준편차 0.75m, 고도 변 화는 표준편차 1.88m, 위치 변화는 표준편차 1.44m로 매우 우 수한 정밀도를 보였다.
GLONASS의 항법 파라미터와 성능을 분석한 결과 GPS와 견주어도 손색이 없을 정도로 매우 우수하였다. 세계적으로 현재 GPS 단일 시스템에 대한 의존도가 매우 높아지고 있는 시점에서 글로벌한 항법시스템으로 운용 중인 FDMA 방식의 GLONASS를 이용하는 것은 의도적 또는 비의도적 협대역 간 섭에 대해 보다 강건할 수 있다.
향후 연구에서는 GNSS 통합수신기 운용에 초점을 맞추어 정밀도 향상, 재밍 대응 연구 등을 중점 수행하고자 한다.