

ņä£ ļĪĀ
ĻĄŁņĀ£ĒĢ┤ņé¼ĻĖ░ĻĄ¼(IMO, International Maritime Organization) ļŖö ņ¦Ćļé£ 2006ļģäļČĆĒä░ ļģ╝ņØśļź╝ ņŗ£ņ×æĒĢśņŚ¼ ņäĀļ░ĢņØś ņĢłņĀäĒĢ£ ĒåĄĒĢŁ, ĒĢ┤ ņ¢æ ĒÖśĻ▓Į ļ│┤ĒśĖ ļō▒ņØä ļ¬®Ēæ£ļĪ£ ĻĘ£ņĀ£ņÖĆ ņŗ£ņŖżĒģ£ ļÅäņ×ģņØä Ļ│©ņ×ÉļĪ£ ĒĢśļŖö ĒśäĒ¢ē ļ░®ņŗØņØś ņĢłņĀä ĒÖĢļ│┤ ņ▓┤ņĀ£ļź╝ ņ¦Ćņ¢æĒĢśĻ│Ā ĒĢŁĒĢ┤ ļ░Å ĒåĄņŗĀ ĻĖ░ņłĀņØś ĒśäļīĆĒÖö, ņØĖĻ░äĻ│ĄĒĢÖņĀü ņןļ╣ä ļ░Å ņŗ£ņŖżĒģ£ ņäżĻ│ä ļ░®ņŗØ ļÅäņ×ģ, ņŗĀļó░ Ļ░Ć ļŖźĒĢ£ PNT ņä£ļ╣äņŖż ļÅäņ×ģņØä ņŻ╝ņÜö ļé┤ņÜ®ņ£╝ļĪ£ ĒĢśļŖö e-Navigation ņĀäļץ ņØ┤Ē¢ē Ļ│äĒÜŹņØä 2014ļģä ņĄ£ņóģ ņŖ╣ņØĖĒĢśņśĆļŗż.(IMO, 2014)
Ēśäņ×¼ ņÜ┤ņÜ® ņżæņØĖ GPS(Global Positioning System)ņÖĆ Ļ░ÖņØĆ ņ£äņä▒ĒĢŁļ▓Ģ ņŗ£ņŖżĒģ£ņŚÉ ņØśĒĢ┤ ņĀä ņ¦ĆĻĄ¼ ņ¢┤ļööņŚÉņä£ļéś ĒĢ┤ņé¼ ņŚģļ¼┤ņŚÉ ĒĢä ņÜöĒĢ£ ņĀĢĒÖĢļÅäņÖĆ Ļ░ĆņÜ®ņä▒ņØä Ļ░¢ļŖö PNTņĀĢļ│┤ļź╝ ĒÜŹļōØĒĢĀ ņłś ņ׳ņ£╝ļéś ņ¦ĆņāüņŚÉņä£ņØś ļé«ņØĆ ņłśņŗĀ ņŗĀĒśĖ ņäĖĻĖ░, Ļ│ĀņØśņĀüņØĖ ņ×¼ļ░Ź ņŗĀĒśĖņØś Ļ░äņäŁ ļō▒ ļŗżņ¢æĒĢ£ ņŗ£ņŖżĒģ£ ņĘ©ņĢĮņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ ņ¦ĆņåŹĻ░ĆļŖźĒĢśĻ│Ā ņŗĀļó░ĒĢĀ ņłś ņ׳ļŖö ņŗĀļó░ļÅä ĒÖĢļ│┤ņŚÉļŖö ĒĢ£Ļ│äĻ░Ć ņ׳ļŗż.
ņŗĀļó░ Ļ░ĆļŖźĒĢ£ ļśÉļŖö ĒÜīļ│Ą Ļ░ĆļŖźĒĢ£ PNTļĪ£ ļČłļ”¼ļŖö Resilient PNTļŖö GNSS(Global Navigation Satellite System)Ļ░Ć ņĀ£Ļ│ĄĒĢś ļŖö PNT ņĀĢļ│┤ņØś ņĘ©ņĢĮņä▒ņØä Ļ│ĀļĀżĒĢśņŚ¼ GNSS ņĀ£Ļ│Ą ņĀĢļ│┤Ļ░Ć ņé¼ņÜ® ļČłĻ░ĆĒĢ£ Ļ▓ĮņÜ░ņŚÉļŖö ļ░▒ņŚģ ņŗ£ņŖżĒģ£ņ£╝ļĪ£ņŹ©ņØś ĻĖ░ļŖź, GNSS ņĀ£Ļ│Ą ņĀĢļ│┤ Ļ░Ć ņé¼ņÜ® Ļ░ĆļŖźĒĢ£ Ļ▓ĮņÜ░ņŚÉļÅä ņŗĀļó░ņä▒ ĒÖĢļ│┤ļź╝ ņ£äĒĢ£ ņ×ēņŚ¼ ņĀĢļ│┤ļĪ£ņŹ© ņØś ĻĖ░ļŖźņØä ņłśĒ¢ēĒĢśļŖö Ļ░£ļģÉņĀü ņÜ®ņ¢┤ņØ┤ļŗż.
Resilient PNTļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢ£ ņŗ£ļÅäļŖö GNSSņĀĢļ│┤ņŚÉ Loran, ļśÉļŖö eLoran ņŗĀĒśĖņÖĆ IMU(Inertial Measurement Unit) ņĀĢļ│┤ļź╝ ņ£ĄĒĢ®ĒĢśļŖö ņĀĢļ│┤ ņ£ĄŌĆżļ│ĄĒĢ® Ļ┤ĆņĀÉņŚÉņä£ņØś ņä▒ļŖź Ļ░£ņäĀ ļģĖļĀźņØ┤ ņŻ╝ļźśļź╝ ņØ┤ļŻ©ņ¢┤ ņÖöļŗż. ņĄ£ĻĘ╝ņŚÉļŖö ĒĢ┤ņāüņŚÉņä£ ņé¼ņÜ® Ļ░ĆļŖźĒĢ£ ļŗżņ¢æĒĢ£ ņĀäĒīī ņŗĀĒśĖļź╝ ņé¼ņÜ®ņ×ÉņØś ĒĢäņÜöņŚÉ ļö░ļØ╝ ņé¼ņÜ®ĒĢśļŖö SooP(Signal of opportunity)Ļ░£ļģÉņØä ņĀüņÜ®ĒĢśļŖö ņé¼ņÜ®ņ×É ņäĀĒāØ ņŗĀĒśĖ ĻĖ░ļ░ś ņĖĪņ£ä Ļ░£ ļģÉņ£╝ļĪ£Ļ╣īņ¦Ć ļ░£ņĀäĒĢśĻ│Ā ņ׳ļŗż.(Johnson, G, et, al, 2014)
ņ¦ĆĻĖłĻ╣īņ¦Ć ņŗ£ļÅäļÉ£ ĒĢ┤ņ¢æ ļČäņĢ╝ Resilient PNTļź╝ ņ£äĒĢ£ ŌĆśR-modeŌĆÖ ĻĄ¼Ēśä ņŚ░ĻĄ¼ļŖö ĒĢ┤ņāüņØ┤ļÅÖņŚģļ¼┤ņÜ® ņä£ļ╣äņŖż ļīĆņŚŁņØś ĒåĄņŗĀ ņŚģļ¼┤ņÜ® ņĀäĒīīļź╝ ĒÖ£ņÜ®ĒĢśļŖö ļÅÖĻĖ░ņŗØņØ┤ļŗż. ĒĢ£ ņśłļĪ£, Johnson(2014) ņØĆ GNSS ņśżņ░© ņĀĢļ│┤ļź╝ ņé¼ņÜ®ņ×ÉņŚÉĻ▓ī ņĀäļŗ¼ĒĢśĻĖ░ ņ£äĒĢ£ MFļīĆņŚŁņØś DGNSS ĻĖ░ņżĆĻĄŁ ņä£ļ╣äņŖżņŚÉ ļīĆĒĢ┤ 3Ļ││ ņØ┤ņāüņØś ĻĖ░ņżĆĻĄŁņØä ņĀĢļ░Ć ņŗ£ Ļ░üņŚÉ ļÅÖĻĖ░ ņŗ£ņ╝£ ņØ┤ļź╝ ņłśņŗĀĒĢ£ ņłśņŗĀĻĖ░Ļ░Ć ņé╝Ļ░ü ņĖĪļ¤ēņ£╝ļĪ£ ņĖĪņ£äļź╝ ĒĢśļŖö ļ░®ņŗØņØä ņŚ░ĻĄ¼ĒĢśņśĆļŗż. ļśÉĒĢ£ ņ£ĪņāüņŚÉ ĻĖ░ņ¦ĆĻĄŁņØä Ļ░¢Ļ│Ā ņ׳ļŖö VHFļīĆņŚŁņØś AIS ņä£ļ╣äņŖżņŚÉļÅä ļÅÖņØ╝ĒĢ£ ļ░®ņŗØņØä ņĀüņÜ®ĒĢ┤ Ļ░ĆļŖźņä▒ ņŚ░ ĻĄ¼ļź╝ ņłśĒ¢ēĒĢ£ ļ░ö ņ׳ļŗż.
ņØ┤ļ¤¼ĒĢ£ ļÅÖĻĖ░ņŗØ ņĖĪņ£äļŖö ņ£ĪņāüņŚÉ ņ£äņ╣śĒĢ£ ĻĖ░ņżĆĻĄŁ ņŗ£ņŖżĒģ£ņØ┤ UTCļō▒ņØś ņĀĢļ░Ć ņŗ£Ļ░üņŚÉ ļÅÖĻĖ░ļź╝ ņ£Āņ¦ĆĒĢśĻ│Ā ņ׳ņ¢┤ņĢ╝ ĒĢ£ļŗż. ļśÉĒĢ£ ĻĖ░ ņĪ┤ ņłśņŗĀĻĖ░ņØś ĒĢśļō£ņø©ņ¢┤ņĀü, ņåīĒöäĒŖĖņø©ņ¢┤ņĀü ņłśņĀĢņØ┤ ĒĢäņÜöĒĢśĻĖ░ ļĢīļ¼Ė ņŚÉ ļŗ╣ņןņØś ļīĆņĢłņØ┤ ļÉśĻĖ░ņŚÉļŖö ņāüļŗ╣ĒĢ£ ņŗ£Ļ░äņØ┤ ņåīņÜöļÉĀ Ļ▓āņØ┤ļ»ĆļĪ£ ļ│┤ļŗż ĒśäņŗżņĀüņØĖ ņĀæĻĘ╝ ļ░®ņĢł ņĀ£ņŗ£Ļ░Ć ĒĢäņÜöĒĢśļŗż.
ņØ┤ļ¤¼ĒĢ£ ļ░░Ļ▓ĮņŚÉņä£ ļ│Ė ļģ╝ļ¼ĖņŚÉņä£ļŖö ĒĢ┤ņé¼ņŚģļ¼┤ņŚÉ ĒÖ£ņÜ® Ļ░ĆļŖźĒĢ£ ļ╣äļÅÖĻĖ░ņŗØ R-modeļź╝ ņ£äĒĢ┤ AISļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņ¢æļ░®Ē¢ź ļ®öņŗ£ņ¦Ć ĻĄÉ ĒÖś ņĖĪņ£ä ĻĖ░ļ▓ĢņØä ņĀüņÜ®ĒĢśļŖö AIS-TWR ĻĖ░ļ▓ĢņØä ņĀ£ņĢłĒĢśņŚ¼ ĻĖ░ļ│Ė ņä▒ļŖźņŚÉ ļīĆĒĢ┤ ĒÅēĻ░ĆĒĢśņśĆļŗż.
2ņןņŚÉņä£ļŖö TWR(Two-way ranging) ĻĖ░ļ▓ĢņØä AISņŚÉ ņĀüņÜ®ĒĢś ĻĖ░ ņ£äĒĢ£ ļÅÖņ×æ ņŗ£ļéśļ”¼ņśż ļ░Å Ļ│ĀļĀżĒĢ┤ņĢ╝ ĒĢĀ ņśżņ░© ņÜöņØĖ ļČäņäØņØä ĒåĄ ĒĢ┤ ĒÖ£ņÜ® Ļ░ĆļŖźņä▒ņØä Ļ▓ĆĒåĀĒĢ£ļŗż. 3ņןņŚÉņä£ļŖö AIS-TWRņØś ĻĖ░ļ│Ė ņä▒ ļŖź ĒīīņĢģņØä ņ£äĒĢ┤ ĻĖ░ļ│Ė ņĢīĻ│Āļ”¼ņ”ś ļ░Å Ļ┤ĆĻ│ä ņŗØ ļō▒ņØś ĻĖ░ļ│Ė ņäżĻ│äļź╝ ņĀ£ņŗ£ĒĢśĻ│Ā Ļ┤ĆļĀ© ņŗØņ£╝ļĪ£ļČĆĒä░ ņČöņĀĢ ĒīīļØ╝ļ»ĖĒä░ņŚÉ ļīĆĒĢ£ Ēü¼ļלļ©Ė-ļØ╝ ņśż ĒĢśĒĢ£ņØä ņ£ĀļÅäĒĢ£ļŗż.(Mengali, 20013) 4ņןņŚÉņä£ļŖö 3ņןņØś Ļ▓░Ļ│╝ļź╝ ĒÖ£ņÜ®ĒĢśņŚ¼ AISņØś Ēśäņ×¼ ņé¼ņ¢æņŚÉ ĻĖ░ļ░śņØä ļæö AIS-TWR ĻĖ░ļ▓ĢņØś ņŗ£ ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļź╝ ņĀ£ņŗ£ĒĢśĻ│Ā 5ņןņŚÉņä£ Ļ▓░ļĪĀ ļ░Å Ē¢źĒøä ņŚ░ĻĄ¼ ļ░®Ē¢źņØä ņĀ£ņŗ£ĒĢśņśĆļŗż.
ļÅÖņ×æ ņŗ£ļéśļ”¼ņśż ļ░Å ņśżņ░© ļČäņäØ
2.1. AIS-TWR ļÅÖņ×æ ņŗ£ļéśļ”¼ņśż
ņ¢æļ░®Ē¢ź ļ®öņŗ£ņ¦Ć ĻĄÉĒÖśņŚÉ ņØśĒĢ£ Ļ▒░ļ”¼ ņĖĪņĀĢ ĻĖ░ļ▓ĢņØĖ TWRņØĆ JTIDS(Joint Tactical Information Distribution System)ņÖĆ Ļ░Ö ņØĆ ņāüļīĆĒĢŁļ▓Ģ ĻĖ░ļ▓ĢņŚÉņä£ ņé¼ņÜ®ĒĢśļŖö RTT ļ®öņŗ£ņ¦Ćļź╝ ņØ┤ņÜ®ĒĢ£ ļæÉ ņŗ£ ņŖżĒģ£ņØś ņŗ£Ļ░ü ļÅÖĻĖ░ļź╝ ĻĖ░ļ░śņ£╝ļĪ£ ņŗĀĒśĖ ņ¦ĆņŚ░ ņŗ£Ļ░äņØä ņČöņĀĢĒĢśļŖö ļ░® ņŗØĻ│╝ ļæÉ ņŗ£ņŖżĒģ£ņØś ņŗ£Ļ░ü ļÅÖĻĖ░Ļ░Ć ņŚåļŖö ņāüĒÖ®ņŚÉņä£ļÅä ņĀüņÜ® Ļ░ĆļŖźĒĢ£ ļ░®ņŗØņØä Ļ│ĀļĀżĒĢĀ ņłś ņ׳ļŗż. ņŗ£Ļ░ü ļÅÖĻĖ░Ļ░Ć ņŚåļŖö Ļ▓ĮņÜ░ņŚÉļŖö Ļ░ü ņŗ£ņŖżĒģ£ ņØś ņ×Éņ▓┤ Ēü┤ļ¤ŁņŚÉ ļö░ļźĖ ņŗ£ņŖżĒģ£ ļé┤ļČĆņØś ņ¦ĆņŚ░ņŗ£Ļ░äņØä ĒÖ£ņÜ®ĒĢśņŚ¼ ļæÉ ņŗ£ņŖżĒģ£Ļ░äņØś ņŗĀĒśĖ ņĀäĒīī ņ¦ĆņŚ░ņŗ£Ļ░äņØä Ļ│äņé░ĒĢĀ ņłś ņ׳ļŗż. Fig.1ņŚÉ ļö░ ļØ╝ TWRņŚÉ ņØśĒĢ£ ņĀäĒīī ņ¦ĆņŚ░ ņŗ£Ļ░äņØĆ ņŗØ (1)Ļ│╝ Ļ░ÖņØ┤ ņĀĢļ”¼ĒĢĀ ņłś ņ׳ļŗż.
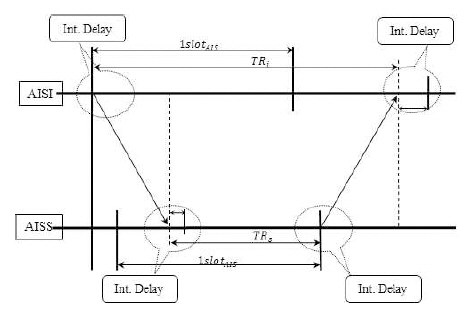
ņŚ¼ĻĖ░ņä£ TRi ļŖö TWRņØś Interrogator(ņŗ£ņŖżĒģ£ Ļ░ä Ļ▒░ļ”¼ļź╝ Ļ│ä ņé░ĒĢśļŖö ņĖĪ) ņŗ£ņŖżĒģ£ņØ┤ Ļ│äņé░ ņĀłņ░© ļÅÖņĢł ļé┤ļČĆņĀüņ£╝ļĪ£ ņ╣┤ņÜ┤ĒŖĖ ĒĢśļŖö ņŗ£Ļ░äņØ┤ļ®░, TRs ļŖö TWRņØś Reply ņŗ£ņŖżĒģ£ņØ┤ ļ®öņŗ£ņ¦Ćļź╝ ņłśņŗĀĒĢ£ ļÆż, ĒÜīņŗĀĻ╣īņ¦ĆņØś ņŗ£ņŖżĒģ£ ļé┤ļČĆ ņ¦ĆņŚ░ ņŗ£Ļ░äņØ┤ļ®░ ĒĢ┤ņāüņŚÉņä£ņØś ņĀäĒīī ņåĪņŗĀ ņ¦ĆņŚ░ņØĆ ņåĪņłśņŗĀ ņŗ£ņŖżĒģ£ ņ¢æļ░®Ē¢źņ£╝ļĪ£ ļÅÖņØ╝ĒĢśļŗżĻ│Ā Ļ░ĆņĀĢĒĢ£ļŗż.
ņŗØ (1)ņØĆ TWR Ļ│äņé░ņŗØņØä ļ│┤ņØĖ Ļ▓āņ£╝ļĪ£ ņŚ¼ĻĖ░ņŚÉļŖö ņåĪņŗĀņĖĪ ņŗ£ ņŖżĒģ£ņØś ņŗĀĒśĖ ņåĪņŗĀņØĆ ņ¦ĆņĀĢļÉ£ ņŗ£ņĀÉ, ņ”ē AIS slotņØś ņŗ£ņ×æņĀÉņŚÉņä£ ņĀĢĒÖĢĒ׳ ņØ┤ļŻ©ņ¢┤ņ¦Ćļ®░ ļæÉ ņŗ£ņŖżĒģ£ņØś ļé┤ļČĆ ņ¦ĆņŚ░ ļ░Å Ēü┤ļ¤Ł ņśżņ░© ļō▒ņØĆ ļÅÖņØ╝ĒĢśļŗżļŖö Ļ░ĆņĀĢņØ┤ ņ׳ļŗż. ņ”ē, AISņŚÉ TWRņØä ņĀüņÜ®ĒĢśļŖö Ļ│╝ņĀĢņŚÉ ņä£ TDMA ņŖ¼ļĪ»Ļ│╝ ņĀäĒīī ņĀäņåĪ ņŗ£ņĀÉņØś ļČłņØ╝ņ╣ś, ņŗ£ņŖżĒģ£ Ēü┤ļ¤Ł ņśż ņ░©, ņŗ£ņŖżĒģ£ ļé┤ļČĆ ņŗĀĒśĖņ▓śļ”¼ ņśżņ░© ļō▒ņØś Ļ│ĀļĀżĻ░Ć ĒĢäņÜöĒĢśļŗż.
AIS-TWRņØĆ ļŗżņØīņØś ņł£ņä£ļĪ£ ļÅÖņ×æĒĢ£ļŗż. Fig. 1ņŚÉņä£ AISI ņŗ£ ņŖżĒģ£ņØĆ ņ¦ĆņĀĢļÉ£ ņŖ¼ļĪ»ņØś ņŗ£ņ×æĻ│╝ ĒĢ©Ļ╗ś ļ®öņŗ£ņ¦Ćļź╝ ņåĪņŗĀĒĢ£ļŗż. AISS ņŚÉ ļÅäņ░®ĒĢ£ ņŗĀĒśĖļź╝ ļ│ĄņĪ░ĒĢśļŖö ļÅÖņĢł ņŗ£ņŖżĒģ£ ļé┤ļČĆ ņ¦ĆņŚ░ņØ┤ ļ░£ņāØĒĢś Ļ│Ā ņØ┤Ēøä AISSĻ░Ć ĒÜīņŗĀ ļ®öņŗ£ņ¦Ćļź╝ ņåĪņŗĀĒĢśĻĖ░Ļ╣īņ¦Ć ļīĆĻĖ░ ņŗ£Ļ░äņØ┤ ļ░£ ņāØĒĢ£ļŗż. ņØ┤Ēøä ņŗĀĒśĖņØś ļ│ĆņĪ░ļź╝ ĒåĄĒĢ£ ĒÜīņŗĀ ļ®öņŗ£ņ¦Ć ņåĪņŗĀ Ēøä, AISI ņŗ£ņŖżĒģ£ņØś ņŗĀĒśĖ ņłśņŗĀ ļ░Å ņŗØ (1)ņŚÉ ņØśĒĢ£ ļæÉ ņŗ£ņŖżĒģ£ Ļ░ä ņŗĀĒśĖ ņĀäĒīī ņ¦ĆņŚ░ ņŗ£Ļ░ä ņČöņĀĢņØ┤ ņØ┤ļŻ©ņ¢┤ņ¦äļŗż.
2.2. ņśżņ░© ņÜöņØĖ ļČäņäØ
AIS ņŗ£ņŖżĒģ£ņØĆ ņŗĀĒśĖņØś ņåĪņŗĀĻ│╝ ņłśņŗĀ ņŗ£ ņŗĀĒśĖņ▓śļ”¼ Ļ│╝ņĀĢņŚÉņä£ ņ¦ĆņŚ░ ņŗ£Ļ░äņØ┤ ļ░£ņāØĒĢśļŖöļŹ░ ņŚ¼ĻĖ░ņŚÉļŖö ņĀäĒīī ņŗĀĒśĖ ņåĪņŗĀņØä ņ£äĒĢ£ RF ņåĪņŗĀ ļīĆĻĖ░ņāüĒā£ ņłśļ”Į ņŗ£Ļ░äĻ│╝ ļŹ░ņØ┤Ēä░ņØś ļ│ĆņĪ░ ļ░Å ļ│ĄņĪ░ ļō▒ņØä ņ£äĒĢ£ ņŗĀĒśĖņ▓śļ”¼ ņ¦ĆņŚ░ ņŗ£Ļ░äņØ┤ ĒżĒĢ©ļÉ£ļŗż. Han, et, al(2004)ņØś ņŚ░ĻĄ¼ņŚÉ ļö░ļź┤ļ®┤ 300ŃÄ▓ņØ┤ļé┤ņŚÉ 12.5WņØś ņČ£ļĀźņŚÉ ļÅäļŗ¼ĒĢĀ ņłś ņ׳Ļ│Ā, ņāüņÜ® AIS ļŹ░ņØ┤Ēä░ ņ▓śļ”¼ ņ╣®ņģŗ ņé¼ņ¢æ(C.M. PIc, 2016)ņŚÉ ļö░ļź┤ļ®┤ ļŹ░ņØ┤Ēä░ ļ│ĆņĪ░/ļ│ĄņĪ░ ņŗ£ņŖżĒģ£ ņŗĀĒśĖņ▓śļ”¼ņŚÉ ņØśĒĢ£ ļé┤ļČĆ ņ¦ĆņŚ░ņØĆ ņĢĮ 800ŃÄ▓, ņ”ē AIS 1slotņŚÉ ĒĢ┤ļŗ╣ĒĢśļŖö 256bit ņżæ, 8bitsņŚÉ ĒĢ┤ļŗ╣ĒĢ£ļŗż.
Table┬Ā1
TOA calculation parameter(C. M. PIc, 2016)
| AIS data field | bits | Ticks(24kHz) |
|---|---|---|
| Tx rise time | 8 | 20 |
| Preamble | 24 | 60 |
| Start flag | 8 | 20 |
| Internal delay | 8 | 20 |
| Total | 120 |
ļŹ░ņØ┤Ēä░ ņŗĀĒśĖ ņ▓śļ”¼ ņØ┤ĒøäņŚÉ Ļ░Ćņן Ēü░ ņśżņ░© ļ░£ņāØ ņÜöņØĖņØĆ ĒÜīņŗĀ ļ®öņŗ£ņ¦ĆņØś ņĀäņåĪĻ╣īņ¦Ć Ļ▒Ėļ”¼ļŖö ņŗ£Ļ░äņØ┤ļ®░ ņØ┤ļŖö AIS ĒāĆņ×ä ņŖ¼ļĪ»ņŚÉ ļ¦×ņČöņ¢┤ņĢ╝ ĒĢśļŖö AIS-TWRņØś Ļ▓ĮņÜ░ Ēü░ ņśżņ░© ņÜöņØĖņØ┤ ļÉ£ļŗż. ņØ╝ļ░ś ņĀüņØĖ TWR ļ¼ĖņĀ£ņŚÉņä£ ņĀäņåĪ ļīĆĻĖ░ļĪ£ ņØĖĒĢ£ ņ¦ĆņŚ░ ņŗ£Ļ░äņØĆ ņ¦¦ņĢäņĢ╝ ĒĢśļ®░ ĻĖĖņłśļĪØ ņ×Éņ▓┤ Ēü┤ļ¤Ł ņśżņ░© ļłäņĀüņ£╝ļĪ£ ņØĖĒĢ┤ ņĀäņ▓┤ ņ¦ĆņŚ░ņŗ£Ļ░äņØś ņĖĪņĀĢ ņśżņ░©Ļ░Ć ņ”ØĻ░ĆĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.(Baba, 2011) ņŗ£ņŖżĒģ£ Ēü┤ļ¤Ł ņśż ņ░©ļĪ£ ņØĖĒĢ£ ņŗ£Ļ░ä ņśżņ░©ļŖö Ēü┤ļ¤Ł Ēæ£ļźś ņśżņ░©(drft), ļģĖĒÖö ņśżņ░© (aging) ļ░Å ņĢłņĀĢļÅäļź╝ ĒżĒĢ©ĒĢ£ ņŗØ (2)ņÖĆ Ļ░Öļŗż.(Chu, 2012)
ņØ┤ ņÖĖņŚÉļÅä ņŗ£ņŖżĒģ£ Ēü┤ļ¤Ł ĒĢ┤ņāüļÅäņŚÉ ņØśĒĢ£ ņ¦ĆņŚ░ ņŗ£Ļ░ä ņśżņ░©ļÅä Ļ│Ā ļĀżĒĢ┤ņĢ╝ ĒĢ£ļŗż. ņØ┤ļŖö ņŗĀĒśĖņØś ņŗżņĀ£ ņłśņŗĀ ņŗ£Ļ░ü ļīĆļ╣ä ņāśĒöīļ¦üņØä ņ£äĒĢ£ ļööņ¦ĆĒäĖ Ēü┤ļ¤ŁņØś ĒĢ┤ņāüļÅäņŚÉ ņØśĒĢ£ ņØĖņ¦Ć ņŗ£Ļ░üņØś ņ░©ņØ┤ļź╝ ļ¦ÉĒĢśļ®░ ņØ┤ ļĪ£ ņØĖĒĢ£ ņśżņ░©ļÅä ņČöņĀĢ ņŗØņŚÉ ļ░śņśüĒĢ£ļŗż.(Wang, et. al, 2010)
ĻĖ░ļ▓Ģ ņĢīĻ│Āļ”¼ņ”ś ļ░Å Ēü¼ļלļ©Ė-ļØ╝ņśż ĒĢśĒĢ£
3.1. AIS-TWR ņĢīĻ│Āļ”¼ņ”ś
Fig. 2ņŚÉņä£ AISI ņŗ£ņŖżĒģ£ņØś ņŗĀĒśĖ ņĀäņåĪ Ēøä, AISS ņŗ£ņŖżĒģ£ņŚÉ ņŗĀĒśĖ ļÅäņ░® ņŗ£Ļ░ü ļīĆļ╣ä Ēü┤ļ¤Ł ĒĢ┤ņāüļÅäņŚÉ ņØśĒĢ£ ņśżņ░©ļź╝ ╬ös ļĪ£ ļéśĒāĆ ļé┤ņŚłĻ│Ā Ļ░ÖņØĆ AISIņØś ņśżņ░©ļź╝ ╬öi ļĪ£ Ēæ£ĒśäĒĢśļ®░ ļ¬©ļæÉ ņĀĢĻĘ£ļČäĒżļź╝ Ļ░¢ļŖö ļ×£ļŹż ļ│ĆņłśļĪ£ Ļ░ĆņĀĢĒĢ£ļŗż. Fig. 2ņŚÉņä£ ļæÉ ņŗ£ņŖżĒģ£ņØś ņŖ¼ļĪ»ņØ┤ ņä£ļĪ£ ņØ╝ņ╣śĒĢśņ¦Ć ņĢŖļŖö Ļ▓āņ£╝ļĪ£ Ēæ£ĒśäļÉśņŚłļŖöļŹ░ AIS-TWRņØĆ ļæÉ ņŗ£ ņŖżĒģ£ņØś ļÅÖĻĖ░Ļ░Ć ļ¦×ņ¦Ć ņĢŖļŖö Ļ▓ĮņÜ░ņŚÉļÅä ļÅÖņ×æ Ļ░ĆļŖźĒĢ┤ņĢ╝ ĒĢśĻĖ░ ļĢīļ¼Ė ņØ┤ļŗż.
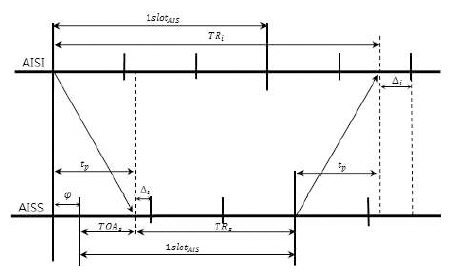
Fig. 2ņŚÉ ļéśĒāĆļéĖ ļæÉ ņŗ£ņŖżĒģ£ Ļ░ä ņŗĀĒśĖ ņ¦ĆņŚ░ ņŗ£Ļ░äņØś ņČöņĀĢ ņŗØņØĆ ļŗżņØīĻ│╝ Ļ░Öļŗż.(Wang, et, al, 2010)
3.2. AIS-TWR Ēü¼ļלļ©Ė-ļØ╝ņśż ĒĢśĒĢ£
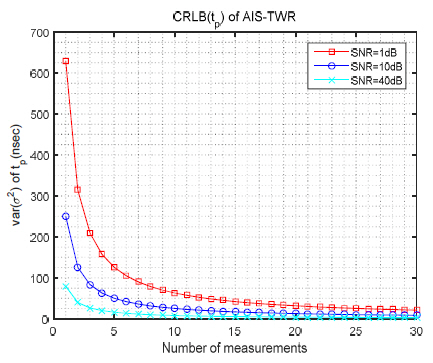
GNSS ļō▒ņØś ņĀĢļ░Ć ņŗ£Ļ░ü ļÅÖĻĖ░ļź╝ ĒÜŹļōØĒĢśņ¦Ć ļ¬╗ĒĢ£ ņāüĒÖ®ņŚÉņä£ļÅä AIS ļ®öņŗ£ņ¦Ć ĻĄÉĒÖśļ¦īņ£╝ļĪ£ Ļ▒░ļ”¼ ņĀĢļ│┤ļź╝ ņ¢╗ĻĖ░ ņ£äĒĢ£ AIS-TWRņØś ņŗ£ņŖżĒģ£ Ļ░ä ņĀäĒīī ņĀäņåĪ ņ¦ĆņŚ░ ņŗ£Ļ░ä ņČöņĀĢ ņä▒ļŖź ĒÅēĻ░Ćļź╝ ņ£äĒĢ┤ Ēü¼ļל ļ©Ė-ļØ╝ņśż ĒĢśĒĢ£ņØä ņ£ĀļÅäĒĢ£ļŗż. CRLBļŖö unbiased estimatorņØĖ Ļ▓Į ņÜ░, ņČöņĀĢĒĢśĻ│Āņ×É ĒĢśļŖö ĒīīļØ╝ļ»ĖĒä░ļź╝ ņĪ░Ļ▒┤ņ£╝ļĪ£ Ļ┤ĆņĖĪ Ļ░ÆļōżņØś ņĪ░Ļ▒┤ ļČĆ ĒÖĢļźĀļ░ĆļÅäĒĢ©ņłśļź╝ ļ░öĒāĢņ£╝ļĪ£ FisherņĀĢļ│┤ ĒĢ©ņłśļź╝ ĻĄ¼ĒĢśĻ│Ā ņĢäļל ņŗØ (5)ņŚÉ ļīĆņ×ģĒĢśņŚ¼ ĻĄ¼ĒĢĀ ņłś ņ׳ļŗż.
ļ©╝ņĀĆ AIS-TWRņØś ĻĄ¼ĒĢśĻ│Āņ×É ĒĢśļŖö ĒīīļØ╝ļ»ĖĒä░ņØĖ ņŗĀĒśĖ ņ¦ĆņŚ░ ņŗ£ Ļ░äņØä ņ£äĒĢ£ ĒÖĢļźĀļ░ĆļÅäĒĢ©ņłśļź╝ ĻĄ¼ĒĢśĻĖ░ ņ£äĒĢ┤ ņŗØ (1)ņØä (3)ņŚÉ ļīĆņ×ģĒĢś Ļ│Ā ņŗØ (6)Ļ│╝ (7)ļĪ£ ļČäļ”¼ĒĢ£ļŗż.
ņĢ×ņä£ ļ×£ļŹż ļ│ĆņłśļĪ£ Ļ░ĆņĀĢĒĢ£ ╬öi ņÖĆ ╬ös ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĀĢĻĘ£ļČäĒż PDFņŗØņØä ņØ┤ņÜ®ĒĢ£ t p ^
ņŚ¼ĻĖ░ņä£ ╬öi ņÖĆ ╬ös ļŖö ļÅÖņØ╝ĒĢ£ ĒÅēĻĘĀĻ│╝ ļČäņé░ ┬Ą, Žā2 ļź╝ Ļ░¢ļŖö Ļ▓ā ņ£╝ļĪ£ Ļ░ĆņĀĢĒĢśļ®░ NņØĆ ļ░śļ│ĄļÉ£ ļ®öņŗ£ņ¦Ć ĻĄÉĒÖśņŚÉ ļö░ļźĖ ļłäņĀü Ļ│äņé░ ĒÜī ņłśņØ┤ļŗż.
ņŗØ (5)ņŚÉ ņŗØ (8)ņØä ļīĆņ×ģĒĢśņŚ¼ ņĀĢļ”¼ĒĢśļ®┤ ļŗżņØīņØś ņŗØ (9)ļź╝ ņ¢╗ņØä ņłś ņ׳ņ£╝ļ®░ ņŗØ (4)ņŚÉņä£ Ļ│ĀļĀżĒĢ£ Ēü┤ļ¤Ł ņśżņ░©ļź╝ ņČöĻ░ĆĒĢśņŚ¼ ņĀĢļ”¼ĒĢśļ®┤ ņŗØ (10)ņØä ņ¢╗ņØä ņłś ņ׳ļŗż.
ņŗØ (9) ļśÉļŖö (10)ņØĆ AIS-TWRņØä ņłśĒ¢ēĒĢśļŖö ļæÉ ņŗ£ņŖżĒģ£ņØś Ēü┤ ļ¤Ł ņśżņ░© ļ░Å Ēü┤ļ¤Ł ĒĢ┤ņāüļÅä ņśżņ░©ļź╝ ļ░śņśüĒĢ£ CRLBņØ┤ļ®░ ņŗØ (1)ņØś ņä▒ļ”ĮņŚÉ ĒĢäņÜöĒĢ£ Ļ░ĆņĀĢ ņżæ ņŗżņĀ£ Ļ│ĀļĀżĻ░Ć ĒĢäņÜöĒĢ£ ņłśņŗĀ ņŗ£ņŖżĒģ£ņØś ņŗĀ ĒśĖ ņČöņĀü ļ░Å ļŹ░ņØ┤Ēä░ Ļ▓ĆņČ£ ĒĢäĒä░ņØś ņČöņĀĢ ņä▒ļŖź ļ░śņśüņØä ņ£äĒĢ£ varprop ļź╝ ĻĄ¼ĒĢ£ļŗż. ņØ┤ļź╝ ņ£äĒĢ┤ AISĻ░Ć ņé¼ņÜ®ĒĢśļŖö GMSK ļ¬©ļōł ļĀłņØ┤ņģśĻ│╝ ļÅÖņØ╝ĒĢ£ ņä▒ļŖźņØä Ļ░¢ļŖö CPM ļ¬©ļōłļĀłņØ┤ņģśņŚÉ ļīĆĒĢ£ modified CRLB ņ£ĀļÅä ņŗØņØä ĒÖ£ņÜ®ĒĢśņśĆļŗż.(Mengali, 2013)
ņŚ¼ĻĖ░ņä£ ŽäļŖö ņŗĀĒśĖ ņČöņĀü ĒĢäĒä░Ļ░Ć ņČöņĀĢĒĢśļŖö ļæÉ ņŗ£ņŖżĒģ£ Ļ░ä ņŗĀĒśĖ ņĀäņåĪ ņ¦ĆņŚ░ ņŗ£Ļ░ä, TļŖö ņāśĒÆĆļ¦ü ņŻ╝ĻĖ░, L0ļŖö Ļ┤ĆņĖĪĒĢśļŖö ņ┤Ø ļ╣äĒŖĖņłś, EsļŖö ļŹ░ņØ┤Ēä░ ņŗ¼ļ▓ī ļŗ╣ ņŚÉļäłņ¦Ć, N0ļŖö ņ×ĪņØī ļĀłļ▓©ņØä ņØśļ»ĖĒĢ£ļŗż. ļśÉĒĢ£ ņāüņłś ╬Š Ōēģ C 2 h 2 T Ōł½ ŌłÆ Ōł× + Ōł× g 2 ( t ) d t
AIS-TWRņØĆ ņŗ£ņŖżĒģ£ Ēü┤ļ¤Ł ņśżņ░© ņÜöņØĖņØä Ļ░ÉņĢłĒĢ£ ņČöņĀĢ ņä▒ļŖź varclkņÖĆ ļæÉ ņŗ£ņŖżĒģ£ Ļ░ä ņŗĀĒśĖ ņČöņĀü ļ░Å ļŹ░ņØ┤Ēä░ Ļ▓ĆņČ£ ĒĢäĒä░ņØś ņČö ņĀĢ ņä▒ļŖźņØĖ varprop ņÜöņåīļŖö ņāüĒśĖ ļÅģļ”ĮņĀüņØ┤ļ»ĆļĪ£ AIS-TWRņØä ņ£äĒĢ£ ņŗĀĒśĖ ņ¦ĆņŚ░ ņŗ£Ļ░äņØś ņ┤Ø ņČöņĀĢ ĒĢśĒĢ£ņØĆ ņŗØ (13)ļĪ£ ņĀĢņØśĒĢĀ ņłś ņ׳ļŗż.(Wen, Chen, Sethares, 2008)
3.3. ļ®öņŗ£ņ¦Ć ņČöĻ░Ć ņĀĢņØś ļ░Å ĻĖ░ĒāĆ ņäżĻ│ä Ļ│ĀļĀżņé¼ĒĢŁ
TWR ĻĖ░ļ▓ĢņØĆ ļæÉ ņŗ£ņŖżĒģ£ņØ┤ Ļ░ü ņŗ£ņŖżĒģ£ ņ×Éņ▓┤ Ēü┤ļ¤ŁņŚÉ ņØśĒĢ┤ ņĖĪ ņĀĢĒĢ£ ņŗ£Ļ░üņØä Ļ│Ąņ£ĀĒĢśņŚ¼ ņŗ£ņŖżĒģ£ Ļ░ä ņŗĀĒśĖ ņĀäņåĪ ņ¦ĆņŚ░ ņŗ£Ļ░äņØä ņĖĪņĀĢ ĒĢ┤ņĢ╝ ĒĢśļ»ĆļĪ£ AIS-TWRņŚÉņä£ļÅä ņĀäņåĪ ļ®öņŗ£ņ¦ĆņŚÉ ĒÜīņŗĀĒĢśļŖö ņŗ£ņŖż Ēģ£ņØś ņ¦ĆņŚ░ ņŗ£Ļ░äĻ│╝ Ēü┤ļ¤Ł ņśżņ░© ņĀĢļ│┤ļź╝ ņĀäņåĪĒĢ┤ņĢ╝ ĒĢ£ļŗż.
ņØ╝ļ░śņĀüņØĖ TWR ĻĖ░ļ▓ĢņØś ņśżņ░©ļŖö ļ░śļ│ĄņĀüņØĖ ļ®öņŗ£ņ¦Ć ņłśņŗĀņŚÉ ņØś ĒĢ£ ļłäņĀü Ļ│äņé░ņ£╝ļĪ£ ņĀĆĻ░ÉĒĢ┤ņĢ╝ ĒĢ£ļŗż. ļłäņĀü Ļ│äņé░ņØä ņ£äĒĢ£ ļ░śļ│ĄņĀü ļ®ö ņŗ£ņ¦Ć ņåĪņłśņŗĀņØĆ ņĀÉņ£Ā ņŖ¼ļĪ»ņØä ļŖśļĀż ņ▒äļäÉ ļĪ£ļō£Ļ░Ć ņ”ØĻ░ĆļÉ£ļŗż. ņ”ē, ņĄ£ļīĆĒĢ£ ņ×æņØĆ ļ░śļ│Ą Ļ│äņé░ ĒÜīņłś ļé┤ņŚÉņä£ ĒĢäņÜöĒĢ£ ņśżņ░© ĒĢ£Ļ│äļź╝ ņ¢╗ņØä ņłś ņ׳ņ¢┤ņĢ╝ ĒĢ£ļŗż.
ņŗ£ļ«¼ļĀłņØ┤ņģś ļ░Å ĒÅēĻ░Ć
AIS-TWR ĻĖ░ļ▓ĢņØĆ ļÅÖņĀü ĒŖ╣ņä▒ņØ┤ ļåÆņ¦Ć ņĢŖņØĆ ĒĢ┤ņāü ĒÖśĻ▓ĮņØä Ļ░É ņĢłĒĢśņŚ¼ ņØ╝ņĀĢĒĢ£ Ļ▒░ļ”¼ņŚÉ ņĀĢņ¦ĆĒĢ£ ļæÉ AIS ņŗ£ņŖżĒģ£ņŚÉ ļīĆĒĢ┤ ņŗ£ļ«¼ļĀł ņØ┤ņģśņØä ņłśĒ¢ēĒĢśņśĆļŗż.
ļ©╝ņĀĆ 2.2ņĀłņŚÉņä£ ļČäņäØĒĢ£ ņśżņ░© ņÜöņØĖļōżņØä ļ░śņśüĒĢśĻĖ░ ņ£äĒĢ┤ Fig. 2 ņØś AISIņÖĆ AISS ņŗ£ņŖżĒģ£ Ļ░üĻ░ü 2ņ░©ļĪĆņØś ņŗĀĒśĖ ņ▓śļ”¼ļĪ£ ņØĖĒĢ£ ņŗ£ņŖż Ēģ£ ļé┤ļČĆ ņ¦ĆņŚ░ņØ┤ ņ׳ļŖö Ļ▓āņ£╝ļĪ£ Ļ░ĆņĀĢĒĢ£ļŗż. ļŗ©, ņŗĀĒśĖ ņ▓śļ”¼ņØś ļīĆļČĆ ļČäņØ┤ Ļ│ĀņĀĢļÉ£ ļģ╝ļ”¼ ĒÜīļĪ£ņŚÉ ļö░ļØ╝ ņØ╝ņĀĢĒĢśĻ▓ī ņłśĒ¢ēļÉśļŖö ņĀÉĻ│╝ Ļ▓ĮĒŚś ņĀü ņ¦ĆņŗØņØä ļ░öĒāĢņ£╝ļĪ£ ņ¦ĆņŚ░ ņŗ£Ļ░äņØś Ļ░Ćļ│ĆņĀüņØĖ ļČĆļČäņØĆ ņ┤Ø ņ¦ĆņŚ░ ņŗ£ Ļ░äņØś 2%ļ¦ī ļ×£ļŹż ļ│ĆņłśļĪ£ Ļ░ĆņĀĢĒĢśņśĆļŗż. ļśÉ ļŗżļźĖ ņśżņ░© ņÜöņØĖņ£╝ļĪ£ 2.1ņĀłņŚÉņä£ Ļ░ĆņĀĢĒ¢łļŹś AIS ņŖ¼ļĪ» ņŗ£ņ×æņĀÉĻ│╝ ņĀäĒīī ņåĪņŗĀ ņŗ£ņĀÉņØ┤ ņØ╝ ņ╣śĒĢśņ¦Ć ņĢŖļŖö synchronization jitterĻ░Ć ņ׳ļŖöļŹ░ ņØ┤ļź╝ Ļ░ÉņĢłĒĢśĻĖ░ ņ£äĒĢ┤ AISņŚÉņä£ļŖö ┬▒ 3bitsļź╝ ĒĢĀļŗ╣ĒĢśņśĆĻ│Ā ņØ┤ ņśżņ░© ņÜöņØĖļÅä ņŗ£ļ«¼ ļĀłņØ┤ņģśņŚÉ ļ░śņśüĒĢśņśĆļŗż.
ņŗĀĒśĖ ņĀäņåĪ ņ¦ĆņŚ░ ņŗ£Ļ░ä ņČöņĀĢņŚÉ ĒÖ£ņÜ®ĒĢĀ ņŗØņØĆ ņŗØ (4)ļź╝ ĻĖ░ļ░śņ£╝ ļĪ£ ļ░śļ│Ą Ļ│äņé░ĒĢśļŖö ņŗØ (14)ļź╝ ĒÖ£ņÜ®ĒĢ£ļŗż. ļśÉĒĢ£ ņØ╝ļ░śņĀüņØĖ TWRĻĖ░ ļ▓ĢĻ│╝ Ļ░ÖņØ┤ ļæÉ AIS ņŗ£ņŖżĒģ£ņØ┤ ĻĘ╝ņĀæ ĒĢ£ ņāüĒÖ®, ņ”ē, t p ^ Ōēā 0
ņŗØ (14)ņŚÉņä£ Ti, Ts ļŖö Ļ░üĻ░ü AISI, AISSņŗ£ņŖżĒģ£ņØś ņāśĒöīļ¦ü ņŻ╝ ĻĖ░(1/9,600bps), čöi, čösļŖö Ļ░ü ņŗ£ņŖżĒģ£ņØś Ēü┤ļ¤Ł ņśżņ░©, ╬öi, ╬ös ļŖö 0 Ļ│╝ 1ņé¼ņØ┤ņØś Ļ░ÆņØä Ļ░¢ļŖö ļ×£ļŹż ļ│ĆņłśņØ┤ļŗż.
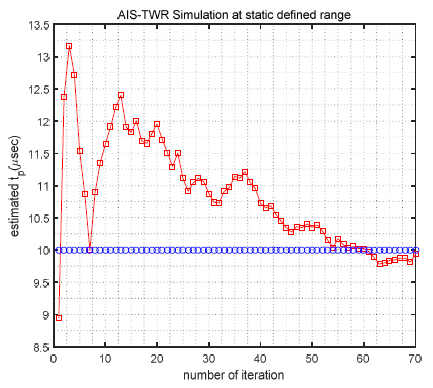
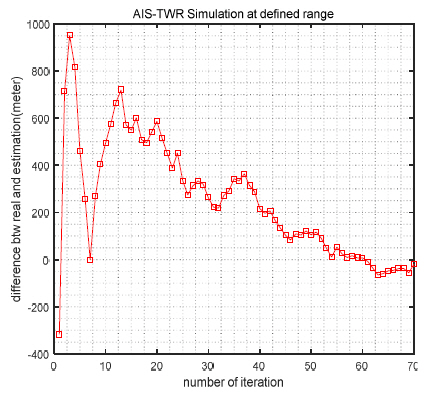
ļæÉ AIS ņŗ£ņŖżĒģ£ņØ┤ Ļ░üĻ░ü AISI, AISS ņŚŁĒĢĀļĪ£ 3km ļ¢©ņ¢┤ņĀĖ ņ׳ ļŖö Ļ▓ĮņÜ░ļź╝ Ļ░ĆņĀĢĒĢśĻ│Ā, ļłäņĀü ļ░śļ│Ą Ļ│äņé░ 70ĒÜīĻ╣īņ¦Ć ņłśĒ¢ēĒĢśņśĆļŗż.
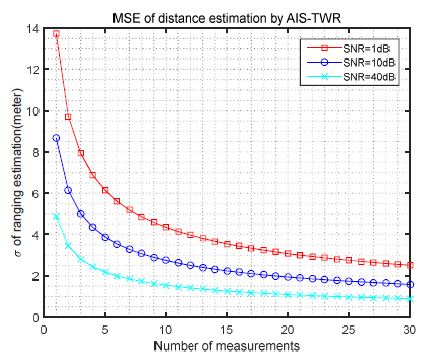
Fig. 5ņÖĆ Fig. 6ņØĆ Ļ░üĻ░ü ņČöņĀĢĒĢ£ ņ¦ĆņŚ░ ņŗ£Ļ░äĻ│╝ ņĀäĒīī ņåŹļÅäļź╝ ĻĖ░ ņżĆņ£╝ļĪ£ ļ│ĆĒÖśĒĢ£ Ļ▒░ļ”¼ ņČöņĀĢ Ļ░ÆņØä ļéśĒāĆļéĖ Ļ▓āņØ┤ļŗż.
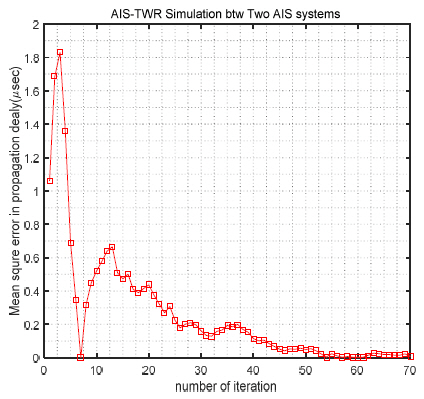
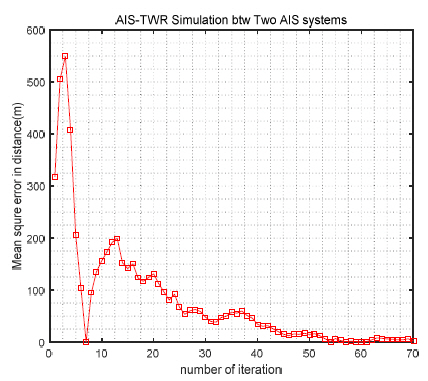
ņČöņĀĢ ņŗØņØś ņ¦łņĀü ĒÅēĻ░Ćļź╝ ņ£äĒĢ┤ ņ¦ĆņŚ░ ņŗ£Ļ░äņØś Mean Square Errorļź╝ Fig. 7ņŚÉ, Ļ▒░ļ”¼ņŚÉ ļīĆĒĢ£ MSEļź╝ Fig. 8ņŚÉ ļéśĒāĆļé┤ņŚłļŗż.
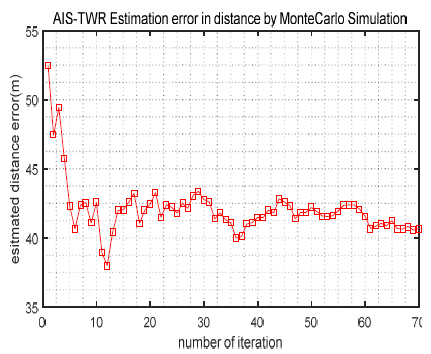
AIS-TWRņØĆ Ēśäņ×¼ņØś AIS ņé¼ņ¢æņØä ĻĘĖļīĆļĪ£ ĒÖ£ņÜ®ĒĢ£ļŗżļŖö Ļ░ĆņĀĢ ņØä Ļ░¢Ļ│Ā ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ņāüļŗ╣ ņłśņżĆņØś ļ░śļ│Ą Ļ│äņé░ ņØ┤ĒøäņŚÉ ņØ╝ļ░śņĀüņØĖ ĒĢ┤ņé¼ņŚģļ¼┤ņŚÉ ĒÖ£ņÜ® Ļ░ĆļŖźĒĢ£ ņłśņżĆņØś ņśżņ░© ņØ┤ļé┤ļĪ£ ņłśļĀ┤ĒĢ©ņØä ņĢī ņłś ņ׳ļŗż. ĻĘĖļ¤¼ļéś Ļ░Ćļ│ĆņĀüņØĖ ļ│Ćņłś ļōżņØ┤ ņŗ£ļ«¼ļĀłņØ┤ņģś ļé┤ņŚÉ ņāüļŗ╣ļ¤ēņØ┤ ĒżĒĢ©ļÉśņ¢┤ ņ׳ĻĖ░ ļĢīļ¼ĖņŚÉ ņĀÉņ¦äņĀüņØĖ ņłśļĀ┤ Ļ▓░Ļ│╝ļŖö ļ│┤ņŚ¼ņŻ╝ņ¦Ć ļ¬╗ĒĢśĻ│Ā ņ׳ļŗż. ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ│äņé░ Ļ▓░Ļ│╝ņØś ĒÖĢļźĀņĀü Ļ▓Ćņ”ØņØä ņ£äĒĢ┤ ļ░śļ│Ą Ļ│äņé░ ņØś ņĄ£ņóģ Ļ▓░Ļ│╝Ļ░Ć ņĢäļŗī Ļ░ü Ļ│äņé░ ņ░©ņłśļ│ä ĒÅēĻĘĀņØä ļÅäņČ£ĒĢ£ļŗż. Fig. 9 ļŖö AIS-TWRņØś 70ĒÜī ļ░śļ│Ą Ļ│äņé░ņØä ņ░©ņłśļ│äļĪ£ 5,000ĒÜī ļłäņĀüĒĢś ņŚ¼ Ļ░ü Ļ│äņé░ ņ░©ņłśļ│ä ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļź╝ ļéśĒāĆļéĖ Ļ▓ā ņØ┤ļŗż.
Ļ▓░ ļĪĀ
ņŗĀļó░ Ļ░ĆļŖźĒĢ£ PNTņä£ļ╣äņŖżļź╝ ĻĄ¼ĒśäĒĢśĻĖ░ ņ£äĒĢ┤ GNSSņÖĆ Ļ░ÖņØĆ ņ£äņä▒ĒĢŁļ▓Ģņŗ£ņŖżĒģ£ņŚÉņØś ņØśņĪ┤ļÅäļź╝ ļé«ņČ£ ĒĢäņÜöĻ░Ć ņ׳ļŗżļŖö ņĀÉĻ│╝ ņĀäĒīī ĒÖśĻ▓ĮņØ┤ļéś ĒĢ┤ņé¼ ņŚģļ¼┤ ņāüĒÖ®ņŚÉ ļö░ļØ╝ ņäĀĒāØņĀü ņĖĪņ£ä ņŗĀĒśĖ ĒÖ£ņÜ®ņØ┤ ĒĢä ņÜöĒĢśļŗżļŖö ņĀÉ, ĒŖ╣Ē׳ ļÅÖĻĖ░ņŗØ ņĖĪņ£äļź╝ ņ£äĒĢ£ ņ£Īņāü ņØĖĒöäļØ╝ņŚÉņØś Ēł¼ņ×É Ļ░Ć ņēĮņ¦Ć ņĢŖļŗżļŖö ĒśäņŗżņĀü ļīĆņĢł ĒĢäņÜöņä▒ ņĖĪļ®┤ņŚÉņä£ AIS-TWRĻ│╝ Ļ░ÖņØĆ ļ╣äļÅÖĻĖ░ņŗØ R-mode ĻĖ░ļ▓ĢņØä ņĀ£ņĢłĒĢśņśĆļŗż.
AISņŗ£ņŖżĒģ£ ļé┤ļČĆņØś ņŗĀĒśĖņ▓śļ”¼ ņ¦ĆņŚ░ ņśżņ░©, Ēü┤ļ¤Ł ĻĖ░ņØĖ ņśżņ░©ņÖĆ ņŖ¼ļĪ» ĻĖĖņØ┤, ņ¦ĆĒä░ ļō▒ņØś TDMAņé¼ņ¢æņ£╝ļĪ£ ņØĖĒĢ£ ļŗżņ¢æĒĢ£ ņśżņ░© ņÜöņØĖ ņØä AIS ņé¼ņ¢æņŚÉ ļö░ļØ╝ ļČäņäØĒĢśĻ│Ā ņØ┤ļź╝ ļ░śņśüĒĢśņŚ¼ AIS-TWR ņĢīĻ│Ā ļ”¼ņ”śņŚÉ ļö░ļźĖ ĻĖ░ņ┤ł ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ļź╝ ļ│┤ņśĆļŗż. ņĀĢĒÖĢļÅä ņĖĪļ®┤ņŚÉ ņä£ļŖö ņāüļŗ╣ĒĢ£ ņśżļźśļĪ£ ņ×æņÜ®ĒĢśļŖö ņāüļŗ╣ĒĢ£ ĻĖĖņØ┤ņØś AIS ņŖ¼ļĪ» ĻĖĖņØ┤ ņÖĆ synchronization jitter ļō▒ņØś Ēü░ ņśżņ░©ļĪ£ ņØĖĒĢ┤ ņłśņŗŁ ĒÜī ņØ┤ņāü ņØś ļ░śļ│Ą Ļ│äņé░ ĒøäņŚÉ ņØśļ»Ė ņ׳ļŖö Ļ│äņé░ Ļ▓░Ļ│╝ļź╝ ņ¢╗ņØä ņłś ņ׳ņŚłņ£╝ļ®░ ĒÖĢļźĀņĀü Ļ▓Ćņ”ØņØä ņ£äĒĢ£ 5,000ĒÜīņØś ļ¬¼Ēģīņ╣┤ļź╝ļĪ£ ņŗ£ļ«¼ļĀłņØ┤ņģś Ļ▓░Ļ│╝ ņĢĮ 41mņØś ņČöņĀĢ ņśżņ░©ļź╝ ļ│┤ņśĆļŗż.
GNSS ļśÉļŖö ņ£ĪņāüĻĖ░ņ¦ĆĻĄŁņØś ņĀĢļ░Ć ļÅÖĻĖ░ņŚÉ ņØśĒĢ£ ļÅÖĻĖ░ņŗØ ņĖĪņ£äņŚÉ ļ╣äĒĢ┤ ņāüļīĆņĀüņ£╝ļĪ£ ļé«ņØĆ ņĀĢĒÖĢļÅäļź╝ ļ│┤ņśĆņ£╝ļéś GNSSĻ░Ć ļČĆņ×¼ĒĢśĻ▒░ ļéś ļÅÖĻĖ░ņŗĀĒśĖļź╝ ĒÖĢļ│┤ĒĢĀ ņłś ņŚåļŖö Ļ▓ĮņÜ░ņŚÉ ĒĢ┤ņāüņŚģļ¼┤ņŚÉ ĒÖ£ņÜ® Ļ░ĆļŖź ĒĢ£ Ļ░ĆļŖźņä▒ņØä ļ│┤ņśĆņ£╝ļ®░ Ē¢źĒøä ļŗżņ¢æĒĢ£ ņśżņ░©ņÜöņØĖņØś Ļ░Éņåī ļ░®ņĢłņØä ņĀæļ¬®ĒĢśņŚ¼ Ē¢źņāüļÉ£ ņĀĢĒÖĢļÅä ļ░Å ņČöņĀĢ ņä▒ļŖźņØä ļ│┤ņØĖļŗżļ®┤ Resilient PNTņØś ĒĢ£ ļīĆņĢłņ£╝ļĪ£ ĒÖ£ņÜ® Ļ░ĆļŖźĒĢĀ Ļ▓āņ£╝ļĪ£ ĻĖ░ļīĆĒĢ£ļŗż.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






