잠수함의 Conning Tower 위치 및 제어판 형태에 따른 동적 안정성 분석
Dynamic Stability Analysis of a Submarine by Changing Conning Tower Position and Control Planes
Article information
Abstract
본 논문에서는 수중운동체 중 하나인 잠수함의 코닝타워(Conning tower) 위치 및 제어판 형태에 따라 4가지 타입별로 나누어 회 전팔 시험(Rotating arm test)을 실시하였다. 또한 본 RA 시험을 통하여 유체력 미계수를 추정하였으며 수평면 운동에 대한 동적 안정성 (Dynamic stability)을 평가하였다. 특히, 자유수면의 영향으로부터 자유로운 심도비(Depth ratio) 6.0에서 힘과 모멘트를 측정한 후, 다중회귀 분석을 이용하여 유체력 미계수를 추정하였다. 최종적으로 선형유체력 미계수를 이용한 수평면 동적 안정성 지수를 산정함으로써 잠수함 타 입별 특성이 동적 안정성에 미치는 영향을 분석하였다.
Trans Abstract
In this paper, the captive model test of a submarine using the RA test was carried out in a square basin. The target model submarine consisted of four types varying according to the position of conning tower and control planes. Hydrodynamic derivatives were acquired by multi-regression analysis. As a result, horizontal dynamic stability indexes of the four types presented positive values and satisfied dynamic stability requirements. In addition, the stability index of type 1 and type 4 – each with the same cruciform configuration of the aft planes - scored within the acceptable range of motion stability.
1. 서 론
최근 수중운동체에 관한 연구가 수중미사일, 잠수함 등 군 사적 용도에서 무인잠수정 및 수중글라이더와 같이 해양자원 탐사 및 개발용으로 확장되어 다양한 아이템으로 폭넓게 진행 되고 있으며, 특히 이러한 수중운동체의 조종성능 추정에 관 한 연구가 활발히 진행되고 있다. 한편, 수중운동체 중 잠수함 설계의 경우, 조종운동 시뮬레이션을 통하여 안정성, 타각에 대한 응답 특성, 조종 특성, 제어 특성 등 여러 가지 특성들에 대한 예측을 실시하게 된다. 이에 앞서, 대상 잠수함의 운동특 성을 가장 잘 묘사할 수 있는 수학 모델을 수립하고 이를 위 한 운동체의 정확한 유체력 미계수의 추정이 필수적으로 따르 게 된다. 전통적으로 유체력 미계수를 추정하는 방법에는 모 형시험, 이론적 추정식, CFD 등에 의한 방법이 있으며, 현재 정밀도 높은 다양한 모형시험 방법을 이용한 유체력 연구가 추진되고 있다.
Jung et al.(2014)은 잠수함 모델을 대상으로 연직면 운동장 치(Vertical planar motion mechanism)를 이용한 모형시험을 수행하여 선형 유체력 미계수를 추정한 바가 있다. 그리고 Kim et al.(2000)과 Jeong et al.(2016)은 몰수체와 잠수함 모 형에 대한 회전팔 시험(Rotating arm test, RA)을 각각 수행 하였다. 또한 선박해양플랜트연구소(KRISO)의 제어형 예인전 차시험(Computerized planar motion carriage test)을 이용한 Kim et al.(2012) 논문과 몰수체 대상으로 원추형 시험 (Coning motion test)을 수행한 Park et al.(2015)의 논문 등 각각의 시험방법에 의한 유체력 미계수를 추정한 다양한 연구 사례를 찾아볼 수가 있다.
이러한 모형시험들 가운데 특히, RA 시험은 가속도와 다른 운동변수들과의 비선형 교차항을 비교적 쉽게 구할 수 있으 며, 편류각(Drift angle) 및 선수각속도(Yaw velocity)에 관련 된 유체력 미계수를 비교적 정확히 획득할 수 있는 시험으로 알려져 있다.
최근 5년간 RA 시험에 관한 연구사례를 살펴보면, 국내에 서는 Jeong et al.(2016)에 의하여 잠수함 모형에 대한 실험적 연구를 실시한 바가 있고, 국외의 경우, DTRC(David Taylor Research Center)에서 설계된 SUBOFF 모델을 대상으로 CFD를 이용한 수치시뮬레이션 결과를 다룬 논문(Pan et al., 2015)을 찾아볼 수가 있다. 상기와 같이 RA 시험장치 및 시험 방법은 국내외적으로 상당히 전문성을 요구하는 모형시험으 로서, 본 연구와 같이 잠수함을 대상으로 RA 시험을 통한 타 입별 안정성을 논의한 연구사례는 드물다 하겠다.
본 논문에서는 수평면 운동에 관한 RA 시험을 실시하여 유 체력 미계수를 추정하였다. 또한 시험 설비, 시험 방법 및 절 차를 상세히 소개하였으며, 잠수함 모형의 코닝타워 및 제어 판 위치변경에 따른 타입별 특징과 함께 수평면 운동에 대한 동적 안정성 지수를 산정한 후, 동적 안정성을 평가함으로써 잠수함 형태가 안정성에 미치는 영향을 분석하였다.
2. 회전팔 시험 방법
2.1. 시험 설비 및 수조 개요
실험에 사용된 RA 시험 설비는 국내 국방과학연구소의 사 각수조에 설치된 구속모형시험 장치로써 시험설비의 개념도 는 Fig. 1과 같다. 피봇(Pivot)을 중심으로 우측 회전팔 (Rotating arm)의 예인 스트럿(Towing strut) 끝단에 운동체 모형을 설치하고 상하 및 좌우 위치 조절과 함께 선회운동을 부가하게 된다.
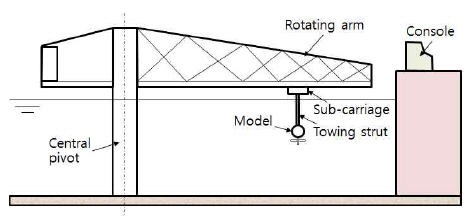
Configuration of the rotating arm facility
전체 수조 크기는 35m×35m, 수심 3.5m, 최대 회전팔 길이 15m이며, 예인속도는 최대 4m/s까지 가능하나 안전상의 이유 로 본 실험에서는 2m/s로 설정하여 수행하였다. 시험 수조 및 설비의 실제 사진은 Fig. 2에 나타낸 바와 같다.

Photograph of the rotating arm facility
2.2. 시험 방법 및 조건
Fig. 3은 RA 시험의 운동 메카니즘을 보여주고 있으며, 선 회속도를 일정하게 하여 회전팔 길이 R을 변화시킴으로써 각 속도 r을 조절하게 되고, 편류각을 변화시켜 병진속도 u, υ가 변화하게 된다.
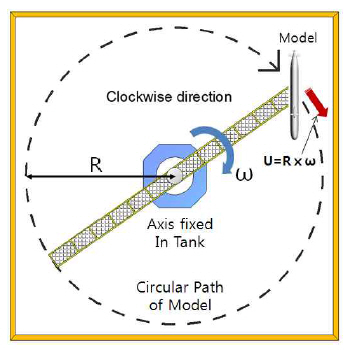
Mechanism of the rotating arm test
본 모형 시험조건은 Table 1과 같이 정리하였다. 접선속도 (U)는 2m/s로 고정시키고, 회전팔의 길이, 편류각(Drift angle) 및 심도비(Depth ratio)의 변화를 주었다. 그리고 잠수 함 모형계열에 대해 총 168 케이스(Case)의 실험을 수행하였 다. 회전팔의 길이 R에 따른 회전속도 r의 변화는 Table 2에 나타내었으며, 여기서 L은 모형의 길이를 의미한다.

Test Condition

Test parameters
실험에 사용한 분력계는 수밀형 6분력계로서 3축에 대한 힘과 모멘트의 6가지 성분을 측정할 수 있다. 분력계의 설치 에 앞서 교정(Calibration) 장비에서 분동(Weight)을 이용하여 각 축에 작용하는 힘과 모멘트를 측정하고, 측정한 센서 전압 을 힘과 모멘트로 변환하는 식을 도출하여 적용하였다. 또한 회전팔 시험 운동계측을 위해 2조의 PC와 근거리 무선통신장 치를 이용하여 데이터를 획득하였다. 회전팔이 부착된 부전차 에는 축전지 전원으로 구동되는 PC 기반 계측시스템을 설치 하고, 작업대차에 설치된 별도의 PC가 부전차에 놓인 PC를 제어함과 동시에 계측 신호를 전송받도록 하여, 운용자로 하 여금 화면상에서 계측과정을 실시간으로 확인할 수 있도록 하 였으며, 데이터 획득 및 변환 프로그램은 HBM의 Catman을 활용하였다(Fig. 4 참조).

Data acquisition and monitoring system
본 실험의 대상 모형은 잠수함이며, 초기 설계 과정에서 다 양한 잠수함 형상에 따른 성능시험과 데이타를 기초로 하여 안정성과 조종성을 고려한 4개의 모형계열을 선정하였다. 이 들 모형은 기본적으로 몸체, 코닝타워, 십자형 및 X자형 타로 구성되어 있다. 특히, 코닝타워 또는 함수 상단에 위치한 수평 제어판 배치의 경우, 후류(Wake) 발생으로 인한 함미 추진기 에의 영향을 최소화할 수 있는 위치를 반영하여 선정되었다.
실험은 프로펠러가 없는 상태에서 수행되었다. 잠수함 모형 설치는 먼저 시험장비의 스트럿 말단에 분력계를 연결한 후, 모델의 중앙 연결치구를 결합하고 모형의 함수, 함미부를 조 립함으로써 설치가 완료된다. Fig. 5는 잠수함 모형의 조립 및 설치 완료 후 수중에 잠겨있는 모습을 보여준다.

Submarine model under water
2.3. 모형선 제원 및 모형별 형상
본 시험의 심도비(H/D)는 Fig. 6과 같이 자유수면으로부터 잠수함 중심까지의 길이(H)에 대한 잠수함 직경(D)의 비로 정 의되며, 본 실험에서는 심도비 6.0에서 실시하였다.

Definition of depth ratio
Table 3은 잠수함 모형의 기본 제원을 나타내고 있다. 여기 서

Principal dimension of submarine model
Fig. 7은 각 모형 형태별 특징을 나타낸 그림이다. 일반적으 로 잠수함의 부가물로 코닝타워인 세일(Sail), 함수 제어판, 함 미 제어판으로 구성된다. 함수 제어판은 주로 저속 시 심도제 어와 트림(Trim) 제어를 수행하고 함미 제어판은 수평판과 수 직타로 구성되어 트림 제어 및 수평면 운동에 대한 조종을 담 당한다(Submarine hydrodynamics, 2015). 코닝타워 형태는 Foil 타입과 Blended 타입(Seil and Anderson, 2012)으로 나누 어지며, 본 실험에서는 크기를 줄여 저항을 최소화하고 추진 효율을 높이기 위한 전략으로써 Foil 타입을 채택하고 있다. 함미 제어판의 경우, 십자형과 X자형 등 다양한 형태가 사용 되며, 함의 크기, 형상 그리고 요구성능에 따라 그 크기와 배 치가 달라진다. 모형 타입 1의 경우, 함미 제어판이 십자형 타 를 가지며, 타입 2의 경우는 함미 제어판만 타입 1보다 큰 형 태이다. 그리고 타입 3의 경우 X자 형태의 타로 구성된다. 타 입 4의 경우는 타입 1과 동일한 크기의 십자형 타이며, 코닝타 워가 후방으로 이동하여 배치된다. 또한 코닝타워의 수평 제 어판이 함수의 몸체 상단으로 이동하게 된다.

Configuration of submarine model
3. 시험 결과 및 분석
3.1. 좌표계 및 운동방정식
본 시험의 좌표계로서 Fig. 8에 나타낸 바와 같으며, 잠수함 의 전진방향을 x축, 우현방향을 y축, 이들과 직각우수좌표계 를 형성하도록 z축을 설정하였다.

Coordinate system: right-handed system
시험에 적용된 수학모형은 Gertler and Hagen(1967)이 제 안한 잠수함 표준 수학모델의 평면운동(Surge-sway-yaw)에 관한 방정식이며, 이에 관한 식은 식 (1)~(3)과 같다. 여기서 m은 운동체의 질량을 의미하고, Iz는 z축에 대한 질량관성모 멘트를,
RA 시험시 분력계에서 계측되는 힘에는 순수 유체력과 함 께 잠수함 모형의 질량에 의한 원심력이 포함된다. 따라서 상 기 운동방정식의 좌변에 있는 원심력항을 우변으로 이항하여, 외력항을 식 (4)~(6)과 같이 정리할 수 있다(
상기 식의 좌변항 하첨자 E는 분력계에 측정된 힘과 모멘 트를 의미하며, 우변항의 유체력 계수들은 Gertler and Hagen(1967)에서 제안한 운동방정식의 선형 및 비선형 계수 들로 구성하여 해석에 적용하였다.
3.2. 결과 및 분석
RA 시험결과는 심도비 6.0에 대하여 4가지의 타입별로 힘 과 모멘트를 측정하여 해석하였고, 다중회귀분석을 이용한 곡 선 근사화(Curve-fitting)를 통해 유체력 미계수를 최종 도출 하였다. 해석과정은 4가지 타입 모두 동일하며 본 논문에서는 이 중 타입 4에 대한 시험결과를 Fig. 9 ~ Fig. 11과 같이 나 타내었다.
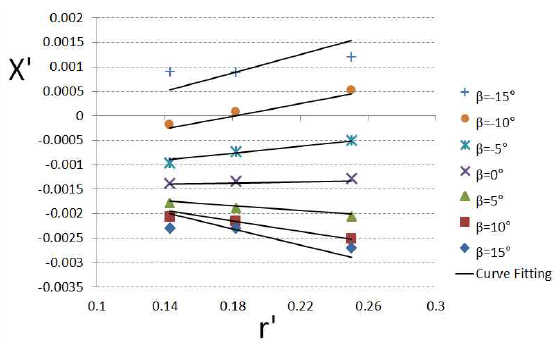
RA test results: Axial force (Type 4)

RA test results: Yawing moment (Type 4)
축방향힘에 대한 계수는 식 (4)를 이용하여 곡선 근사한 후 계수를 추정하였으며 Fig. 9에 나타낸 바와 같다. 편류각 β에 따라 받는 축방향힘의 크기가 증가함을 알 수 있고 회전팔 길 이가 짧을수록, 즉 무차원 각속도 r′가 증가할수록 증가함을 보이고 있다. Fig. 10은 횡방향힘에 대한 시험결과를 보여주고 있으며, 계수 추정방법은 식 (5)를 이용하여 축방향힘의 해석 과 동일하게 수행하였다. 회전팔 길이에 따른 무차원 각속도 r′가 변화하여도 횡방향힘의 변화는 소폭으로 나타나고 있는 반면, 편류각에 따른 힘의 증감이 뚜렷이 나타남으로 속도 υ 의 영향을 받고 있음을 보여준다. 또한 선회력 모멘트의 시험 결과로서 Fig. 11에 나타낸 바와 같으며, 식 (6)을 이용하였고 곡선 근사한 후 계수를 추정하였다. 무차원 각속도 r′가 증가 함에 따라 모멘트가 음의 방향으로 증가함을 보여준다. 최종 적으로 본 실험을 통해 획득한 유체력 미계수 값들을 타입별 로 정리하여 Table 4에 나타내었다.
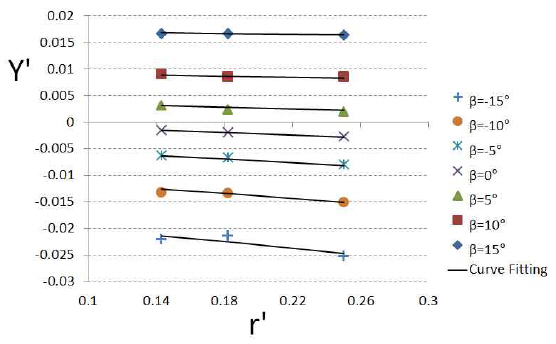
RA test results: Lateral force (Type 4)

Results of Hydrodynamic Coefficient (Type 1~4)
3.3. 수평면 동적 안정성 분석
일반적으로 잠수함은 수평면 조종성능을 극대화하기 위해 marginal stability에 근접하도록 설계가 요구된다. 제어가 없 는 경우의 동적 안정성은 선형방정식의 응답해석을 통해 수평 면의 안정성 지수
Ray et al.(2008)은 잠수함의 안정성 허용범위를 Table 5와 같이 제안하고 있으며, 이 허용범위들은 안정성 분석과 함께 초기설계 단계에서 함수제어판 및 함미타와 같이 고정식 또는 제어식 부가물 등에 요구되는 크기를 결정하는데 사용되어진 다. 본 논문에서 반영된 수평면 안정성지수(

Recommended range of stability and control indices (Ray et al. 2008)

Dynamic stability index (Gh) for four models
동적 안정성 지수의 적정 범위는 실제 건조된 함정 또는 설 계단계의 데이터 베이스를 기반으로 한 경험치이며, 0.4 이상 으로 과도한
또한, 타입 1의 경우는 십자형(Cruciform configuration) 타 로써 형태는 같고 크기를 크게 한 타입 2에 비해 동적 안정성 이 적정한 것으로 나타나며, 타입 4는 십자형 타에 코닝타워 가 후방으로 약 0.16m이동됨으로써 동적 안정성을 더욱 향상 시키는 역할을 하는 것으로 나타났다. 타입 3의 경우 X타로서 미세조종 및 긴급조종이 용이하고 정숙성에 효과적으로 알려 진 형태이나 본 실험결과에서는 과도한 안정성을 보이고 있 다. 추후 타 형상에 따른 물리적 영향에 관하여 추가적인 연구 가 필요할 것으로 판단된다.
4. 결 론
본 연구에서는 국내의 회전팔 시험 설비를 이용하여 잠수 함의 타입별 유체력 미계수를 추정하였고, 잠수함의 코닝타워 위치 및 제어판 형태에 따라 동적 안정성에 미치는 영향을 분 석하였다.
4가지 모형에 대한 동적 안정성 분석결과, 동일한 크기의 십자형 타를 가진 타입 1과 타입 4의 안정성 지수가 허용범위 내로 산정되었다. 반면에 함미 제어판이 십자형이고 타입 1과 타입 4에 비해 큰 형태인 타입 2와 X자형 타를 가지는 타입 3 은 허용범위를 초과하는 것으로 나타났다. 따라서 타입 1과 타입 4가 적정한 동적 안정성과 조종성을 가지는 것으로 분석 되었다. 또한 본 실험결과를 통해 코닝타워와 함수 제어판의 위치는 수평면 운동에 대한 동적 안정성에 영향이 작은 것으 로 나타나는 반면, 함미 제어판의 크기와 형태에 따라 안정성 이 크게 달라짐을 추정할 수 있다.
향후 본 실험결과를 기초로 잠수함 최적설계를 위한 종합 적인 성능평가에 위한 추가적인 연구가 진행될 예정이다.
후 기
본 논문은 부산대학교 기본연구지원사업(2년)에 의하여 연 구되었음.