해양경찰 Water Jet 추진함정의 안전 조함법 연구
A Study on the Safety Handling Method of KCG’s Water Jet Propulsion Ship
Article information
Abstract
해양사고 원인의 대부분을 차지하고 있는 인적오류에 의한 운항과실에는 관련 지식의 결여, 잘못 이해하고 있는 지식, 적용절차의 미숙 등을 들 수 있다. 최근 해양경찰 경비함정에 장착되고 있는 추진기 형태를 살펴보면, 해상치안 수요에 따라 다양화 되고 있는 추세이다. 특히, 소형 경비정에 주로 장착되었던 워터제트 추진기가 중대형 경비함으로 점차 확대되어 전체 함정의 50%에 이르고 있으며, 축 형식은 2 에서 4축, 버켓 유형도 전후진과 조향 제어방식이 전혀 다른 ‘이중역전버켓’과 ‘단일역전버켓’ 방식으로 구분된다. 이러한 운항체계의 다양화 는 운항자의 인적과실 요인을 증가시킬 수 있다. 그러나 워터제트 유형별 고유의 특성에 알맞은 조종법의 연구는 부족한 편이다. 이 논문에서 는 워터제트 유형별 후진성능을 기반으로 외력의 도움 없이 해양경찰 전용부두의 요건에 적합한 횡이동 방법을 분석하였다. 이어서, 선박조종 시뮬레이터를 활용하여 실험하고, 실험이 곤란한 워터제트 방식 함정은 함정장들의 인터뷰를 통하여 비교·검증하였다. 이를 기반으로 워터 제트 운항 지식의 올바른 습득과 기술적 측면의 인적오류를 최소화하여 해상치안활동에 기반인 함정의 안전운항에 기여하고자 한다.
Trans Abstract
Operational errors caused by human factors, which is the major cause of marine accidents, include lack of knowledge, misunderstanding knowledge, and inadequate procedures. Recently, the type of propulsion mounted on KCG cutters has been diversified. In particular, the water jet propulsion unit, which was mainly installed in small boats, have been gradually expanded to medium and large size Coast Guard cutters, reaching 50% of the total. Axes types are divided into 2 to 4, and the bucket types are divided into Double Reverse Bucket(DRB) and Single Reverse Bucket(SRB); in these, the backward and steering control methods are completely different. Diversification of these operating systems can increase factors causing human error by the ships’ operators. However, there is a lack of research on the maneuvering methods, considering the inherent active characteristics of each type of water jet. In this paper, we analyze the sideway method suitable for the condition of Coast Guard Exclusive wharf without assistance, based on the astern performance of each type. Then, a ship handling simulator was used for the experiment; they compared and verified through interviews of captains.
1. 서 론
국내 해양사고 원인을 살펴보면, 2012년부터 2016년까지 지 난 5년간 해양안전심판원 재결사건 중 81.1%가 인적요인에 의한 운항과실로 분석되고 있다. 여기서 운항과실의 범주에는 출항준비 불량, 조선 부적절, 운항과실 기타 등 13가지의 세부 원인으로 분류하여 인적오류에 의한 사고로 분류하고 있 다.(KMST, 2017) 한편, 호주의 항공, 해양, 철도 사고 조사기 관인 운송안전국(ATSB; the Australian Transport Safety Bureau)에서는 해양사고의 원인을 크게 상황인식, 관리, 위험, 정비 인적오류, 인적오류 외 그룹 등 5가지 범주로 구분하고 있다. 상황인식 그룹은 상황판단(Situation assessment and awareness), 지식수준(Knowledge, skills and abilities), 직권 (commission) 등의 3가지 원인으로 분류하여, 사고 자체 분석 뿐만 아니라 사고가 일어나기 전의 상황들을 종합적으로 정리 하여 항해자의 근본적인 인적오류를 체계적으로 나타내고 있 다.(Kim. et al., 2011)
김 (2011) 등이 제안한 해양사고의 잠재적 근본원인을 파악 하기 위한 원인 분류방안을 살펴보면, 인적오류를 발생시키는 근본원인의 종류를 외부, 개인, 선박 및 선사요인 등 4가지로 크게 구분하고, 개인요인을 정신적, 육체적, 선원 자격 및 훈 련 요인 등 3가지로 분류하였다. 그리고 선원 자격 및 훈련 요 인에는 지식부족, 잘못된 지식, 기술부족 등 9가지로 소분류하 고 있다.(Kim.et.al, 2011) 선박에서는 크고 작은 사건, 사고 및 준사고가 발생하는 데, 경미한 사고나 준사고의 경우 표면적 으로 드러나지 않는 경우가 있을 것으로 판단된다.
2000년대 이후, 해양경찰은 해상치안 요구상황 및 수요와 맞물려 조종성능 향상과 적은 승무 인력으로 직무 효율을 높 이기 위하여 함정 추진기 방식을 고정피치 쌍추진기에서 가변 피치 쌍추진기(Controllable Pitch Twin screw propeller), 2-4 축 형태의 물분사 추진방식(Water Jet Propulsion, 이하 워터 제트) 등으로 다변화하고 있다.(Yun, 2014)
특히, 지속적으로 증가하고 있는 워터제트 추진방식의 보급 속도와 비교하여 체계적인 교육훈련은 아직 부족한 실정이다.
2014년에 해양경찰교육원(Korea Coast Guard Academy, KCGA) 선박조종시뮬레이터(Ship Handling Simulator, SHS) 훈련장에 2개의 워터제트 함정 목업이 구성되면서 교육기관에 서의 1차 기본교육훈련이 시작되었다고 볼 수 있다.
워터제트 조종성능에 대한 기본적인 이해 없이 경험에 의 한 기술 또는 개인능력에 의존하거나, 스크루 추진방식에서 워터제트 함정 또는 추진성능이 다른 워터제트 함정에 근무를 할 경우, 운용자의 지식부족, 실수, 착각, 잘못된 지식, 부적적 할 습관 등 개인의 인적요인으로 인한 운항과실로 연결되어 자체 안전사고, 준사고가 발생할 가능성이 높아질 수 있다.
이 연구에서는 기존 스크루 방식과 워터제트 추진기 유형 별 조종특성이 서로 달라 함정 승무원들의 이해 부족 및 적응 에 많은 시간이 소요되고 있는 점을 감안하여 워터제트 운영 자의 정확한 지식 전달, 기술 습득을 위한 워터제트 조종성능 을 실무적 관점에서 파악․분석하였다.
먼저, 함정에 보급된 3개사의 워터제트 유형을 분류하고 서 로 다른 조향방식과 조향성능 별 조종특성을 비교하였다.
다음으로 선박조종시뮬레이터로 워터제트 함정의 이동특성 을 점검하여 도출된 결과를 함정장 보직교육에 시뮬레이션 적 용하고 훈련내용에 대한 교육생 인터뷰에서 실선과 차이점, 실무 적용의 유용성 등을 검토하여 그 결과를 바탕으로 워터 제트 함정 운항자의 안전운항을 도모하고자 한다.
2. 워터제트 추진 함정 현황
2.1. 추진기 유형별 분류
1986년에 Hamilton사(뉴질랜드)의 소형 워터제트가 국내에 도입된 이후, 고속 여객선 등에 Kamewa사(스웨덴)의 중대형 워터제트 등이 설치 운영되고 있다. 상선, 어선 등과 같은 선 박에서는 다른 추진 장치에 비해 구조가 간단하고, 넓은 속도 범위 내에서 추진효율이 비교적 우수하고 제작비용도 높지 않 기 때문에 나선형 추진방식(Screw Propeller, 이하 스크루 방 식)을 채택한 선박이 많은 편이다. 그러나 워터제트 추진기는 저속에서 추진 효율이 기존 스크루 추진기에 비해 낮지만, Cavitation 성능이 우수하여 임펠러의 고속회전이 가능하기 때문에 고속여객선, 레저보트 등 고속선의 추진기로 많이 사 용되고 있다.(Lee. et al., 2011) 해양경찰에서는 국내 연안 특 성과 조종성능 등을 고려하여 Table 1과 같이 전체 추진기 유 형에서 워터제트가 설비된 함정이 122대(48.4%, 2015년 3월 기준)에 이르러, 점차 함정의 주력 추진기로 채택되고 있는 것 을 알 수 있다.(파출소에 배속된 워터제트 추진 소형 연안구조 정 등은 전체 함정 비율에서 제외)

Status of KCG Ship’s propulsion(march ’15)
높은 비율을 차지하고 있는 노후 고정피치 추진방식 함정 은 워터제트 방식으로 대체 건조될 예정이다. 한편, 해경 파출 소의 신형 연안구조정과 해수욕장 안전관리용 수상오토바이 등도 워터제트 방식을 채택하고 있다. 자체 함정 안전사고를 억제하고 안전운항을 실현하기 위하여 워터제트 추진기의 조 종성능을 이해하고 습득하여 적용하는 절차가 매우 중요하다 고 할 수 있다.
2.2. 워터제트 유형별 구분
해양경찰 함정에 장착된 워터제트 추진기를 축(Axes), 역 전버켓(Reverse Bucket), 조향 형태(Steering Mode), 톤급별 로 구분하여 도식화한 것이 Fig. 1이다.

Steering mode by each type
Fig. 1을 함정톤급에 따라 제작사, 축 형식, 조향 성능, 후진 성능에 영향을 미치는 역전 버켓, 조향 모드 등 유형별로 정리 하면 Table 2와 같이 구분할 수 있다.

Classifying ship into each type of KCG’s Water jet(Yun, 2017)
Fig. 1에서 조타휠(Wheel) 모드의 조향기능은 스크루 방식 의 함정과 동일하게 조향휠(Steering Wheel)에서 기관의 전․ 후진은 기관전령기(Engine Telegraph)에 의해 이루어지는 방 식을 말한다. 분리(Separate) 모드는 조향기능이 조향휠에 의 하지 않고 각 기관전령기에서 조향과 기관을 동시에 사용하는 방식이다, 병렬(common, parallel) 모드는 각 기관전령기 기능 을 한 개의 기관전령기에서 조작하는 방식을 의미한다.
Fig. 3의 300, 500톤급의 부스터(Booster)는 조향 및 후진 기능 없이 전진추력만을 발생시킨다.

Engine Telegraph lever of each type(photo by KCGA, 2015)
해양경찰 경비함정에 장착된 워터제트 유형을 후진성능과 조향성능을 같이 고려하여 구분하면, Fig. 2의 이중역전버켓 (이하 DRB) 유형과 단일역전버켓(SRB 또는 CSU, 이하 CSU)으로 분류할 수 있다.
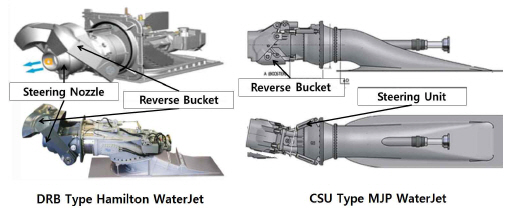
DRB(Below 300T) & CSU(500T) Type WaterJet (HamiltonJet, MJP 2017)
Fig. 3은 각 함정의 기관전령기를 나타낸 것인데, 50톤급 함 정은 2축에 2개의 DRB가 장착되어 있고 조향은 주로 조향휠 에 의한다. 기관전령기 레버(lever)로 전․후진이 가능하지만 방향제어 기능은 없다.(비상 기능은 별도, Backup mode)
300, 500톤급 함정 대부분은 4축에 좌․우측 끝단에 이중 (Double, 300톤) 또는 단일(Single, 500톤) 역전버켓(Reverse Bucket)이 설치되어 기관전령기 레버로 전․후진과 조향이 가능하나 중앙 2개의 부스터는 전진추력을 강화하는 역할만을 하며, 조향휠, 병렬기능을 사용하여 방향전환이 가능하다.
1,000톤급 이상 함정은 3축에 SRB가 장착되어 있고, 조향 휠 기능과 기관전령기에 의한 독립적인 전․후진과 조향기능 을 갖추고 있다.
이러한 함정에 근무하는 항해팀원들은 다양한 형태의 워터 제트 조종설비에 대한 체계적인 이해와 유형별 조종성능에 대 한 명확한 지식과 기술 습득이 요구되며, 이는 함정의 안전운 항을 위해 매우 중요하다고 할 수 있다.
3. 워터제트 유형별 조종 특성 비교
3.1. 워터제트 유형별 기본 조종 특성
DRB 방식은 조향노즐의 중립 위치(조향각 0°)에서 전진 (Forward)은 버켓이 상방향에 위치하고 축펌프(Axial pump) 에서 노즐을 통과한 해수가 뒤로 밀려나오면서 Fig. 4(좌)와 같이 전진추력(Tf)이 발생하여 함정을 앞으로 이동시킨다. (Verheij, 2010)

Fig. 4(중)의 DRB 워터제트 정지(Neutral)는 버켓이 노즐 분사구 가운데 부근에 위치하게 되면,
조향 노즐각 0°에서 전방좌측수류(Fp)에 의한 우현후진추 력(Tp)과 전방우측수류(Fs)에 의한 좌현후진추력(Tp)이 발생 하고 이 후진추력의 합성벡터(Tr)와 후방 수류(Water Flow) 에 의한 전진추력(Tf)이 균형(Tf = Tr = 0)을 이루었을 때 함 정은 정지하게 된다.
Fig. 4(우)의 DRB 워터제트 후진 모드(Reverse mode)에서 버켓이 노즐 아래로 내려가면,
후방수류의 힘이 점차 감소하고 전방수류에 의한 후진추력 (Tr)이 커지면서 함정을 뒤로 이동시킨다. DRB 방식의 후진 은 버켓 하향각 약 30-35°로(Verheij, 2010) 내려가면서 함수 미 방향으로 물이 직분사되지 않고 버켓 양방향 약 20°정도로 분출되는 수류에 의하여 발생되므로 좌․우 분출 수류에 의한 좌․우 추력의 합성벡터(Ts + Tp)로 볼 수 있다.
SRB(CSU) 방식은 조향장치 중립상태에서(조향각 0°) 전진 (Forward)은 Fig. 5(좌)와 같이 버켓이 열리면 부스터 (Booster)를 통과한 후방수류에 의한 전진추력(Tf)이 발생하 며 함정을 앞으로 이동시킨다. 정지(Neutral)는 Fig. 5(중)와 같이 버켓이 물 분사구 가운데 부근에 위치하면, 후방 분사수 류에 의한 전진추력(Tf)과 전방 분사수류에 의한 후진추력 (Tr)이 균형을 이루어 함정은 정지하게 된다. 후진(Astern)은 Fig. 5(좌) 버켓이 닫히며 앞 방향으로 흐르는 전방수류에 의 한 후진추력(Tr)이 함정을 뒤로 이동시킨다.

조향각 0°에서 DRB 방식의 전․후진과 정지 원리가 약간 복잡하나 기관전령기를 사용하여 기관을 제어하는 일반적인 스크루 추진기(Screw propeller) 방식과 크게 차이가 없다.
3.2. 워터제트 유형별 후진 조향 성능
워터제트의 장점 중 하나가 외력의 도움 없이 선박을 안쪽 과 바깥쪽으로(Towed in & out) 끌거나 미는(Push & Pull) 조종성능이 우수하다는 데 있다. 다만, DRB와 CSU 방식에 있어 후진성능에서 많은 차이가 있으므로 유의하여야 한다.
Fig. 6(상) DRB 방식에서 조향각 좌현전타(25°, 30°) 후진 을 살펴보면, 조향노즐이 좌측으로 움직이면서, 좌측 전방수류 (Fp)가 흐르며 우현함미추력(Trs)이 발생한다. 반대로 우현전 타 후진에서는 좌현함미추력(Trp)으로 바뀐다. 즉, DRB 방식 에서 후진시 조향 노즐의 물 분사 각도(조향각)와 반대로 이 동하는 것을 알 수 있다. 이는 DRB 방식이 설비된 수상오토 바이, 연안구조정 등 대부분의 소형정에 해당된다.

Comparing Astern ability of DRB(up) and CSU(below) type water jet
Fig. 6(하) CSU 방식에서는 후진시 조향버켓을 좌현 전타 (30°)하면 버켓이 좌현으로 움직이며 우측전방수류(Fs)가 흐 르고 좌현함미추력(Trp)이 발생한다. 같은 원리로 우현 전타 시 우현함미추력(Trp)으로 바뀐다. 즉, CSU 방식은 스크루 추진기 선박의 후진과 동일한 조향 방향으로 선박이 이동하는 것을 알 수 있다. 특히, 300톤급 함정(DRB)과 500톤급 함정 (CSU)은 선형이나 조타실의 기관전령기 배열이 유사하지만, 후진성능이 서로 다르므로 이를 정확히 이해하여야 한다.
이 후진성능은 함정을 밀고 당기는 추력을 활용한 워터제 트 함정의 횡이동 접이안 조함법의 적용할 수 있는데, 다음과 같이 서로 명확한 차이를 보이고 있다.
4. 워터제트 유형별 횡이동 특성 비교
해양경찰 전용부두는 대부분 협소하며 부두는 안벽, 안벽과 폰툰 연결, 잔교, 부잔교 등 여러 형태이며 함정간 연결, 좁은 함수미 여유공간에서 계류 등 접이안 작업에서 안전사고 위험 은 상존하고 있다. 접안시 진입각도, 불충분한 함수미 여유거 리 등을 감안할 때 예인선, 스러스터의 도움 없이 횡이동할 수 있는 능력은 매우 유용하다고 볼 수 있다. 여유공간 110미터 길이의 부두에 워터제트형 1,000톤급 함정(전장: 91.6미터)이 외력의 도움 없이 무사히 접안한 사례는 워터제트 특성을 명 확히 이해하고, 기술적인 운용능력이 부가된 좋은 예로 볼 수 있다. 여기서는 워터제트 유형별 후진성능을 활용한 횡이동 방법을 살펴보고 가능한 선박조종시뮬레이터를 활용한 시험 결과를 비교하고자 하였다. 또한, 해양경찰교육원에서는 매년 함정장 보직교육을 실시하는데, 2017년 2월 15일부터 24일까 지 3회 실시한 보직교육에 이 시뮬레이션 자료로 훈련을 진행 하고 결과를 서로 공유하며 실선과의 차이점과 시뮬레이션훈 련의 실무 적용도 등을 토론하고 인터뷰하는 방법으로 추가 검증하였다. 총 97명의 함정장 중에서 중대형 CSU 방식 함정 9명, 중형 DRB 방식 함정 6명, 소형 DRB 방식 함정 54명 등 총 69명의 함정장이 해당되었다.
4.1. DRB 방식 함정의 횡이동
DRB 방식 함정이 정지 상태에서 왼쪽으로 횡이동을 하려 면, 이동방향측 좌현기관은 후진(Port eng. Astern), 반대방향 측 우현기관은 전진(Starboard eng. Ahead) 위치로 한다.
함수가 좌현으로 선회하기 시작하면, Fig. 7과 같이 함정이 부두와 수평을 유지하도록 조타휠을 이동 반대방향 우현으로 돌린다. 함정이 왼쪽으로 수평이동을 시작하면 전․후진을 방 지하기 위해 양현 기관 속도 비율을 맞춘다. 좌현기관 후진속 도가 높으면 함정이 후진하며 우편향하고, 좌․우현 속도비가 맞지 않으면 함정이 선회하므로 주의하여야 한다.

Transverse Movement(sideway) of DRB type water jet
Fig.7(좌)을 정리하면, DRB 방식의 좌현 횡이동은
와 같으며, 좌․우현 기관의 전․후진 추력비가 1 : 1 정도 로 균형을 이루어야 한다. 반대 방향인 오른쪽으로 횡이동은 좌․우 기관 상태를 반대로 하고 조타휠은 좌현으로 하면 될 것이다. DRB 방식 함정의 횡이동은 양현 버켓 노즐이 같은 방향으로 움직이므로 조향휠, 분리모드, 레버 병렬모드 (parallel or common mode) 등 각 모드에서 활용할 수 있다. 이때 300톤 함정의 중앙 부스터(Booster)는 사용하지 않는다.
4.2. DRB 방식 함정의 횡이동 시뮬레이션
Table 3과 같이 소형 50톤급 DRB 방식 워터제트 함정을 부두에 좌현 접안할 때 외력을 고려하지 않고 부두 선수방향 (진방위) 330°에서 좌현 횡이동 방향(진방위) 240°로 98m 거 리를 횡이동 하는 시뮬레이션을 시행하였다.

DRB type water jet simulation
○ Ship’s Model

Fig. 8은 DRB 방식 함정을 선박조종시뮬레이터를 활용하 여 왼쪽으로 횡이동 시뮬레이션한 결과이다. Fig. 7의 운용방 법에 의한 이동경로와 약간 차이가 있는 것을 알 수 있었다.

Displayed on the result of DRB’s sideway simulation by SHS, (KCGA, Feb 2017)
Fig.8의 상단 그림은 항적을 표시하였고, 아래 그래프는 선 수방위(Heading), 이동방향(COG), 좌․우현 기관 RPM, 타각 순서로 표시하였다.
왼쪽으로 이동 중 좌․우현 기관사용 비율은 거의 1:1이고 (실선은 좌현기관, 점표시는 우현기관임), 기관을 최초로 밀고 (우현), 당겼을 때(좌현) 선수방위가 왼쪽으로 195°까지 선회 하였다. 이 때 제어타각을 이동 반대방향 즉, 우현 7~8° 정도 주었을 때 240° 방향으로 이동하였으며, 이동속도 0.8~0.9 노 트, 소요시간은 270초였다. 그러나, 지속적인 횡이동을 위해서 이동방향, 선수방위를 주시하며, 타각을 줄였다가 원위치하는 것을 반복하여야만 하였다.
이는 타각(타효), 좌․우현 기관 추력비율에 따라 선수미선 회전 중심위치가 변화하며 정방향 횡이동이 되지 않거나 비스 듬히 이동(사진)하는 것은 선폭, 선체길이, 워터제트 추진설 비간 거리 등이 함수 선회요인으로 작용하기 때문일 것이다.
이러한 경우, 함정의 움직임을 고려하여 전․후진 추력비와 타각을 적절히 조정하여야 할 것이다. 함정장 인터뷰에서 69 척의 워터제트 함정 중 DRB 방식에 승함 중인 60명의 함정장 의견에 의하면, 기관 추력비율은 실선과 유사하지만 제어타각 7~8°는 함정 유형별로 차이가 있는 것을 확인하였다. 또한, Fig. 7과 시뮬레이션의 기관, 조향의 움직임이 실선의 횡이동 과 아주 유사하게 이루어짐을 알 수 있었다.
4.3. CSU 방식 함정의 횡이동
CSU 방식 워터제트는 500톤-1,500톤급 중대형 함정에서 사용되고 있다. 이들 함정의 전장(LOA)은 62-102m 정도에 이르는데 함정의 전장보다 약간 긴 정도의 여유공간 밖에 확 보하지 못한 해양경찰 전용부두 특성상 함정의 횡이동 능력은 매우 유용하다고 할 수 있다.
CSU 방식 워터제트 함정의 조타휠, 병렬모드에서 조향 기 능을 사용한 횡이동은 추진 수류 특성상 매우 어렵다고 볼 수 있으므로 조향 모드는 Fig. 9와 같이 각 기관전령기의 조향기 능을 사용하는 분리모드(Separate mode)를 사용한다. 왼쪽으 로 횡이동 예를 들면, 이동방향측 좌현기관 후진, 조향은 좌측 (Towed out)으로 한다. 이 때 Fig. 9(좌)의 후진좌현추력 (Trp)은 함미를 부두 쪽에서 당기는 효과가 있다. 이동 반대 측 우현기관 전진, 조향은 중립으로 전진직진추력(Tf)이 생성 되도록 한다. Fig. 9와 같이 좌측의 후진좌현추력(Trp)과 우측 의 전진직진추력(Tf)의 합성벡터의 힘에 의해서 함정은 왼쪽 으로 횡이동한다.

Transverse Movement(sideway) of CSU type water jet
와 같으며, 여기에 CSU 방식 함정의 유효타각 5~30° (Anders, et al. 2014) 범위의 타각(Fig. 9의 θsa)과 중심선과 의 제트축 배열각 약 2.5°(Fig. 9의 θaa)를 고려할 때 전진과 후진 기관의 추력비는 1 : 1.01-1.19(cos θ, θ = θsa + θaa) 정도가 좋을 것으로 판단된다. 즉, 후진현측의 기관추력을 전 진현측의 전진추력보다 높게 하여야 한다.
4.4. CSU 방식 함정의 횡이동 시뮬레이션
Table 4와 같이 중형 500톤급 CSU 방식 워터제트 함정을 부두에 좌현 접안할 때 외력을 고려하지 않고 부두 선수방향 (진방위) 240°에서 좌현 횡이동 방향(진방위) 150°로 104m 거 리를 횡이동하는 시뮬레이션을 시행하였다. CSU 방식 함정의 횡이동시 DRB방식 함정과 같이 좌․우현 끝단의 추진체만 사용하고 중앙의 부스터 또는 추진체는 사용하지 않았다.

CSU type water jet simulation
○ Ship’s Model
Fig. 10은 CSU 방식 함정을 정지 상태에서 왼쪽으로 횡이 동 시뮬레이션한 결과이다. Fig.10의 상단 그림은 항적을 표시 하였고, 아래 그래프는 선수방위(Heading), 이동방향(COG), 좌․우현 기관 RPM, 타각 순서로 표시하였다.

Displayed on the result of CSU’s sideway simulation by SHS, (KCGA, Feb 2017)
Fig. 10의 기관 RPM 그래프에서 좌․우현 기관사용 비율 이 약 2:1인데 이는 Fig. 9에서 설명한 추력비 1 : 1.01-1.19와 비교할 때 상당한 차이가 있는 것을 알 수 있었다. 기관을 최 초로 밀고(우현), 당겼을 때(좌현) 선수방위가 왼쪽으로 225° 까지 선회하였다. 이 때 좌현기관 제어타각을 이동방향 즉, 좌 현 25~30° 정도 주었을 때 150° 방향으로 횡이동하였으며, 이 동 속도 0.8~1.0 노트, 소요시간은 255초였다.
CSU 방식 워터제트 함정에 승선 중인 함정장 인터뷰에 의 하면, 실선의 경우 기관 추력비는 Fig.9의 기본 원리가 Fig.10 의 시뮬레이션 결과 값보다 더 유사하였고 시뮬레이션 제어타 각 25~30° 보다는 함정 유형별로 차이가 있으나 실선 제어타 각이 조금 더 작은 것을 확인하였다.
4.5. DRB 방식과 CSU 방식 함정의 횡이동 비교
이상의 내용을 정리하면, DRB와 CSU 방식의 가장 큰 차이 점은 후진시 수류의 방향이 전혀 다르다는 것이다. 정리하면, DRB 방식은 후진시 일반적인 스크루 추진기 선박과는 달리 조타방향과 반대로 이동하고, CSU 방식은 조타방향과 동일한 방향으로 이동한다는 것이다.
이는 각 워터제트 조향 기능 특성에 따른 횡이동에 영향을 미쳐 DRB 방식의 경우 조타휠, 병렬, 분리 모드의 모든 조향 모드에서 횡이동이 가능하지만, CSU 방식의 경우 분리 모드 에서만 횡이동이 가능하다. 예를 들어 좌측으로 이동할 때 Table 5와 같이 이동 측면인 좌측기관을 후진시키는 것은 DRB와 CSU가 동일하지만 DRB는 우현으로 CSU는 이동 반 대방향인 좌현으로 조타하여야 한다. 그리고 이동 반대 측면 인 우측기관을 전진시키는 것은 양 방식이 동일하지만 DRB 는 이동 반대방향인 좌현으로 조타하여야 하고 CSU는 조타 상태를 중립(0°)으로 하여야 한다. 각 워터제트 방식 특성상 전진현의 추력과 후진현의 추력비도 DRB와 CSU방식은 Table 5와 같이 서로 다른 것을 알 수 있었다.

Differences in sideways of DRB and CSU
해양경찰교육원 선박조종시뮬레이터를 활용함에 있어 DRB 방식은 실선과 상당히 유사한 조종법을 보여주었으나, CSU 방식은 전․후진 추력비가 실제보다 많은 차이를 나타내고 있 었다. 이는 시뮬레이터를 도입하면서 CSU 방식의 조종특성에 대한 이해부족으로 시뮬레이터 함정 모델 구성을 DRB 방식 과 유사하게 하였기 때문으로 판단된다.
5. 결 론
함정 안전운항과 관련된 사고 또는 준사고는 운항미숙, 절 차 미준수, 지식의 부재 등 승무원의 인적오류에 의해 발생될 개연성이 크다고 볼 수 있다. 특히, 다변화하는 함정운항체계 에서 조종시스템 관련 지식의 결여나 기술 부족은 안전사고 발생 요인을 증가시킬 수 있다.
이상에서 살펴본 결과, 워터제트 함정은 크게 DRB와 CSU 추진기 유형으로 구분되는 데, 정밀 조함시 자주 사용하는 후 진 특성에 있어 2가지 방식의 추진기는 명확한 차이를 보이고 있으므로 유의하여야 한다. 특히, 함정의 전장(LOA) 보다 약 간 긴 진입 여유공간 밖에 확보하고 있지 않는 해양경찰 전용 부두 특성을 고려하면 외력의 도움 없이 함정이 부두방향으로 이동하거나, 해상에서 선박 검문 검색시 피검선박 현측 계류 시 워터제트 함정의 횡이동 능력은 스크루 방식과 비교하여 상당히 유용하다고 볼 수 있다.
각 워터제트 추진기 유형별 횡이동 특징과 차이점은 Table 5와 같이 비교 정리할 수 있었다. 이 결과는 워터제트 연구자 료, 도면 및 매뉴얼 등을 기초로 하여 선박조종시뮬레이션 실 험자료, 실제 워터제트 방식 함정에 근무하는 함정장 등의 인 터뷰 등을 통하여 검증하였다. 워터제트 함정을 운항하면서 구체적인 이동특성을 고려하지 않은 채 경험․기술적 측면에 서 접근하기보다 이와 같이 도출된 지식적 내용을 함정에서 적용한다면 유형별 워터제트 함정 운항자의 조종성능 이해도 증진과 안전운항에 도움을 줄 것으로 판단된다. 다만, 여기서 언급한 사항은 외력을 고려하지 않은 사항이므로 실제 적용을 위해서는 함정의 제원(선폭, 길이, 추진 설비간 거리)에 따른 전심, 선체 저항 등의 요소를 함께 고려하여야 할 것이다.
향후 정확한 조함법을 정립하기 위해서 외부 환경의 영향 을 고려한 실제 함정에서의 실험 자료가 요구되며, 시뮬레이 션 교육훈련 효과를 높이기 위해서는 CSU 방식 시뮬레이터 함정 DB의 지속적인 개선이 필요하다고 볼 수 있었다. 이러 한 연구결과가 운항자의 정확한 지식 습득을 통한 인적오류를 최소화하고 해양경찰 해상치안활동의 기반인 함정의 안전운 항에 기여할 수 있을 것이다. 끝
후 기
본 논문은 해양수산부의 “해양안전사고 예방시스템 기반연 구(2단계)”과제의 연구결과임을 밝힌다.