

Introduction
There has been a need to introduce e-Navigation, which is a fusion of information and communications technology (ICT) to ship navigation technology, in the international community to prevent marine accidents caused by human factors (IMO, 2008; IMO, 2009; IMO, 2011). According to the statistics of domestic maritime accidents from 2012~2016, 62% of all marine casualties were caused by human factors such as operational errors, among which marine casualties caused in passenger ships and fishing vessels with relatively poor operating environments account for 60% (Bae and Lee, 2014; Kim and Hong, 2013; KMST, 2016).
The Korean e-Navigation was promoted to enhance maritime safety, to improve the efficiency of vessel operation and port operation, and to preempt the newly formed global market in preparation for IMOŌĆÖs introduction of e-Navigation (Jang and Kim, 2015; Jeong and Kim, 2008; Lee et al., 2012; Oh et al., 2012; Shim et al., 2013). In addition to the e-Navigation concept of the IMO for international sailing vessels, the Korean e-Navigation is a service concept that takes into consideration the situation specific to maritime environment in Korea through providing services for fishing vessels, coastal small vessels and passenger ships (KMOF, 2016).
IMO originally proposed seventeen MSPs (Maritime Service Portfolio) at NAV 59 meeting (NAV 59/6, 2013), but MSP 9 (Remote monitoring of ships systems) was abandoned because it could violate the autonomy of the vessel (NCSR 1/28, 2014). The Korean e-Navigation provides five services in total, each of which is: 1) S1 service - vulnerable ship monitoring support service, 2) S2 service - onboard system remote monitoring service, 3) S3 service - weather routing support service, 4) S4 service - small ship electronic chart service, 5) S5.1 service - pilot/ tug boat support service, 6) S5.2 service - marine safety information service. Among them, the S2 service monitors the abnormal condition in case of onboard system fault and intends to prevent the spread of marine accidents due to the onboard system error and responds quickly and accurately to the emergency situation. The S2 service of Korean e-Navigation system is a concept to monitor the abnormal condition of a ship by reducing the scope of ship navigation safety compared with the content of MSP 9 (Remote monitoring of ships systems) that was abandoned at IMO meeting. By establishing a new concept of ship navigation system such as expanding the provision of marine safety information and strengthening on-land monitoring through Korean e-Navigation, it is anticipated that marine accidents will be reduced. Also the efficiency of shipping, ship and logistics will be enhanced, thereby enhancing national competitiveness and creating a marine ICT industry.
The S2 service of the Korean e-Navigation system collects and transmits data from the sensors of main facilities including navigation equipment in the ship, and automatically recognizes and evaluates the shipŌĆÖs emergency situation in the e-Navigation operating system on land, and provides the emergency response guidance to a ship operator. It is a service concept that helps service users cope with navigational hazards and respond efficiently according to the emergency response guidance in the event of a marine accident. In this study, it is focused on S2 service among five services and explains the navigation safety module of S2 service operational concept.
S2 Service Operational Concept
The Korean e-Navigation system S2 service, which is the on-board remote monitoring, collects and processes the main information (fire, ship inclining, tank level, engine, navigational equipment, etc.) of the ship navigating the sea area to detect abnormal condition, and it is a service that provides emergency response guidance to the abnormal vessel. S2 service is divided into three categories, and each category is fire safety module, seakeeping performance safety module and navigation safety module.
The main purpose of the S2 service is to secure the safety of ships navigating in coastal and offshore areas in Korea. It is aimed to prevent the spread of marine accidents through ship condition monitoring, to prevent secondary accident, and to prevent accidents caused by crew fault.
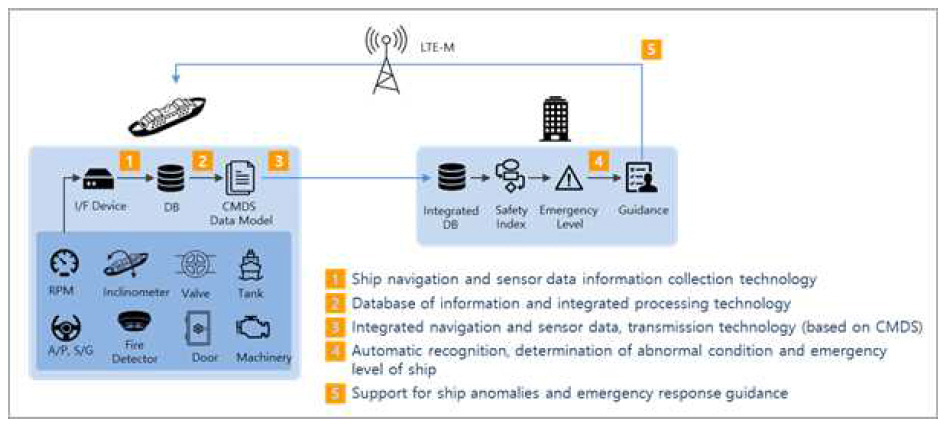
Fig. 1 shows the operational concept of S2 service. The on-board information collecting device collects the equipment and sensor information installed in the ship. The information transmission device collects and processes the vessel information and transmits it to the maritime cloud. The algorithm computation device calculates fire/ seakeeping performance/ navigation safety index using sensor information and generates emergency level information after diagnosis of ship abnormal condition. The emergency response guidance is to prevent the spread of marine accidents and prevent the secondary accident using the maritime accident status information and ship abnormality information. As a result, the S2 service automatically recognizes the ship anomaly status using the ship sensor information, generates emergency level information and emergency response guidance, and provides it to the ship operator.
2.1. Fire Safety Module
The fire safety module calculates the fire safety index in case of a fire on a ship navigating coastal and offshore area, classifies the emergency level according to the degree of danger and generates emergency response guidance by the emergency level.
The fire response guidance provides an information such as the operating time of the fire detector and the temperature value according to the location of the fire to provide effective measures for responding to the fire occurrence space and fire situation. For this purpose, evaluation for fire response according to the ship should be preceded by taking into consideration the ship structure and equipment information including the fire-fighting facilities.
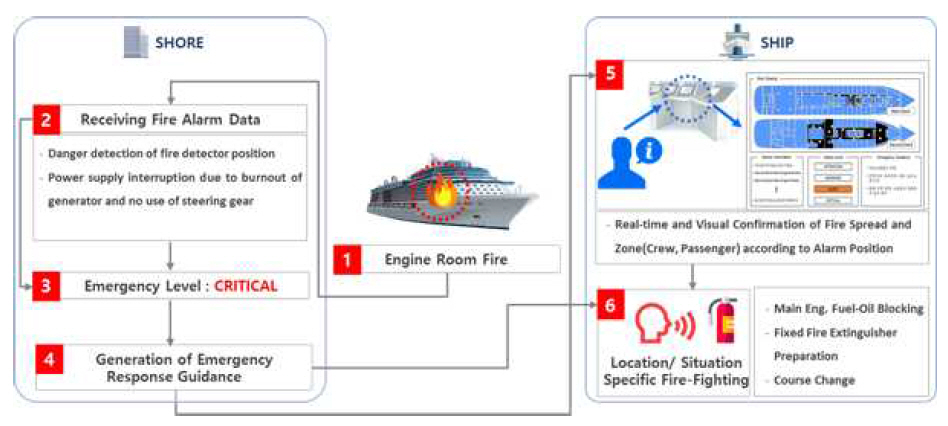
Fig. 2 shows the operational concept for the Korean e-Navigation center onshore and onboard system when a fire occurs on the ship. When a fire occurs in the machinery space, fire safety of the S2 service module receives the fire alarm data and determines the emergency level according to the fire situation and degree of fire spread. The emergency response guidance generated according to the emergency level is provided through real-time and visible information on the degree of the fire spread and the zone according to the position of the fire alarm operation. Finally, the ship operator performs fire suppression depending on the fire occurrence location and the fire situation according to the emergency response guidance.
2.2. Seakeeping Performance Safety Module
The seakeeping performance safety module determines the emergency level by estimating the reaction value of the ship through identification of factors affecting the seakeeping performance of the ship, and provides the emergency response guidance according to the emergency level when an abnormal situation occurs.
For the calculation of seakeeping performance safety index, dynamic and static data such as loading status at the time of vessel entry and departure, weather condition and ballasting operation during navigation are collected. It is a module that analyzes the ship speed, wind speed, wind direction, vessel inclination value and so on during the voyage, and identifies the emergency level according to the seakeeping performance safety index evaluating the ship motion and steering performance of the vessel.
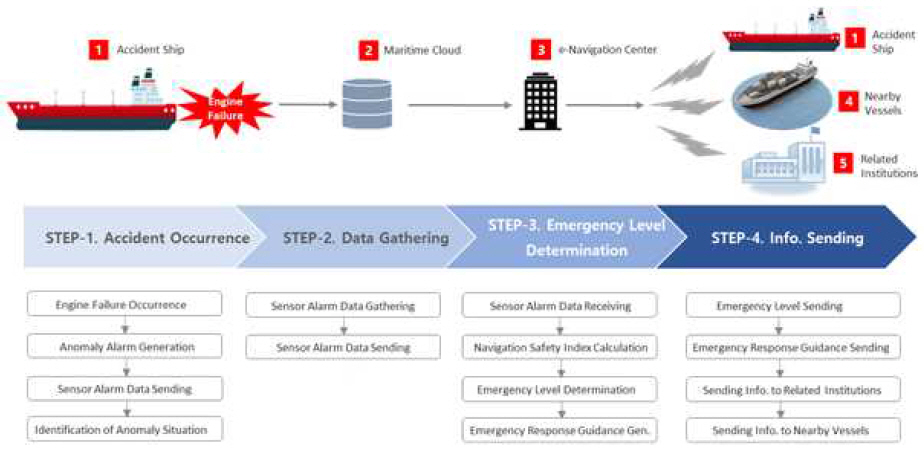
Fig. 3 shows the operational concept of the seakeeping performance safety module. In case of ship grounding, the Korean e-Navigation center on land calculates the seakeeping performance safety index and identifies the emergency level accordingly. Emergency response guidance is generated according to the emergency level, and the generated guidance is provided to the surrounding vessels and related organizations. Vessels whose risks are identified by the seakeeping performance shall take appropriate measures in accordance with the guidance to prevent the spread of marine accidents and to decide whether to continue the voyage.

2.3. Navigation Safety Module
The navigation safety module estimates an anomalous condition of a ship by identifying elements affecting the navigation safety of the ship, and calculates the emergency level according to the abnormal condition of the ship, and provides response guidance to the vessel.
The recognition and evaluation of the abnormal condition according to the navigation situation of the target ship is carried out according to the normal/ abnormal operation of the ship navigation equipment such as the damage of the engine, generator, steering gear, navigational equipment, etc.
Fig. 4 shows the operational concept of the navigation safety module. When an engine failure occurs during ship navigation, it collects equipment fault alarm data, and calculates the degree of an abnormal condition according to the alarm type, and determines the emergency level. This module generates emergency response guidance according to the emergency level, and provides it to the abnormal ship. The generated guidance could be provided to the related organizations and surrounding vessels.
Operational Concept of Navigation Safety Module in S2 Service
The ship sensor used to implement the navigation safety module is based on the shipboard equipment of the Korea Maritime and Ocean University training ship Hanbada. The navigation equipment is based on the mandatory equipment of the SOLAS vessels engaged in international voyage, and additionally the engine/ generator/ steering gear which can limit the control of the ship during the voyage and to make it possible not to under command the ship.
Table 1 lists the equipment used to implement the navigation safety module in S2 service. It includes the navigational instruments such as LOG, AIS, GPS, etc., and three machinery parts are related equipment such as steering gear, engine and generator. Navigation equipment alarms include a list of alarms that can cause a power fail or result in a power fail. Engine alarms include a list of alarms when engine show-down or engine shut-down occurs. It also includes a list of alarms that can result in same results of engine slow-down and engine shut-down as above. The steering gear includes a list of alarms when it is inoperable except when the operator has stopped intentionally, and the generator also includes the case where the equipment is mechanically inoperative except when the operator has stopped intentionally.
Table┬Ā1
Sensor list of navigation safety module in S2 service
Fig. 5 shows the operating procedures of the S2 service including the navigation safety module. The information domain includes the display of the e-Navigation center system and the contents displayed to the shipboard user. The e-Navigation system of the ship and the land includes the contents of data domain. The onboard e-Navigation system collects the sensor data necessary for emergency level determination, and the collected data is saved after processing and displayed to the onboard user.
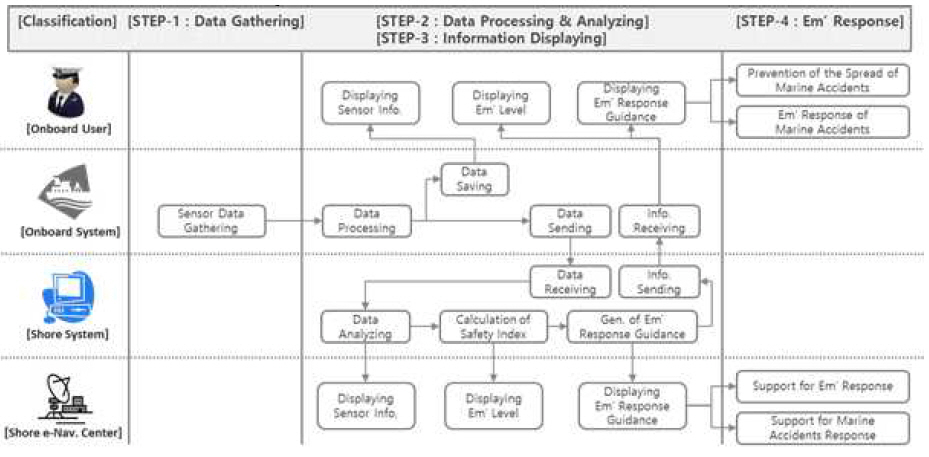
The collected sensor data is processed and transmitted to the e-Navigation system on land. The e-Navigation system on land analyzes the received data to calculate the safety index of the ship in which the anomalous condition occurs, and determines the emergency level according to the safety index. The e-Navigation center on land can carry out emergency response support for the ship, or if necessary, can support maritime accident response when the size of the marine accident is large.
The navigation safety module consists of three sub-modules. First, the safety index sub-module is for estimating the risk that may affect the ship when an abnormal situation occurs in each sensor. Second, the emergency level determination sub-module is for determining the emergency level according to the safety index, and finally emergency response guidance sub-module is for generating a response guidance corresponding to the emergency level and providing the response guidance to the abnormal ship.
3.1. Safety Index Sub-Module
In order to determine the emergency level of the ship in which the abnormal condition occurs, the safety index is calculated by estimating the risk that may occur in the operation of the ship when an abnormality occurs in each sensor. The safety index is identified for each sensor considering the possible impact on navigation safety in case of abnormal condition of each sensor.
Eq. (1) explains the safety index calculation formula that is calculated by applying the weighting factor of equipment in case of an error of navigation equipment and propulsion related equipment of the vessel.
where, M represents the total number of emergency level classes. N represents the number of anomalous equipment used to estimate the safety index. r and ╬▓ represent the weighting factor for each emergency level and the weighting factor for each sensor. x is the sensor identifier. The calculated safety index is expressed through the normalization process for each emergency level.
3.2. Emergency Level Determination Sub-Module
The emergency level determination sub-module of S2 service is a module for determining the emergency level considering the influence on the navigation safety of the equipment in case of an anomaly of the ship equipment.
Emergency levels are divided into four levels of Attention/ Warning/ Alert/ Critical according to ŌĆśEmergency Management Standard Manual for Marine AccidentsŌĆÖ of the Ministry of Maritime Affairs and Fisheries based on Framework Act on the Management of Disasters and Safety (KMOF, 2014; KMGL, 2015).
Attention level includes the alarm types that can cause operation inconvenience due to equipment malfunction during navigation. Warning level includes the alarm types that may cause a ship accident risk due to equipment malfunction during navigation. Alert level includes the alarm types that can cause ship control restrictions, and critical level includes the alarm types that may result in NUC (Not-Under-Command) condition due to equipment malfunction, respectively.
The degree of influence on the navigation safety according to the equipment is classified into five steps depending on the alarm type as shown in Table 2. LL (Low-Low) indicates the case that the impact on the navigation safety of the ship is very low when the equipment is abnormal, L (Low) indicates the case where the impact is low, M (Middle) indicates the middle, H (High) indicates the high impact and HH (High-High) indicates the very high impact.
Table┬Ā2
Emergency level classification according to the weighting factor LL ~ HH of navigation safety module in S2 service (LL : Low-Low, L : Low, M : Middle, H : High, HH : High-High) *NUC : Not-Under-Command
3.3. Emergency Response Guidance Sub-Module
The emergency response guidance sub-module is a module that provides an emergency response guidance to the ship operator according to the safety index and emergency level identified when an abnormal condition occurs onboard. The ship system collects ship sensor alarm data and sends it to the e-Navigation system on land.
The land-based system, which is located on the e-Navigation center, calculates the risk index from the collected alarm data and identifies the emergency level. Then the emergency response guidance sub-module generates response guidance according to the emergency level identified in other modules and provides it to the ship operator.
Fig. 6 shows the concept of emergency response guidance creation flow of navigation safety module in case of engine failure using training ship Hanbada AMS (Alarm Monitoring System) data.
Fig.┬Ā6
Concept of emergency response guidance creation flow of navigation safety module in case of engine failure
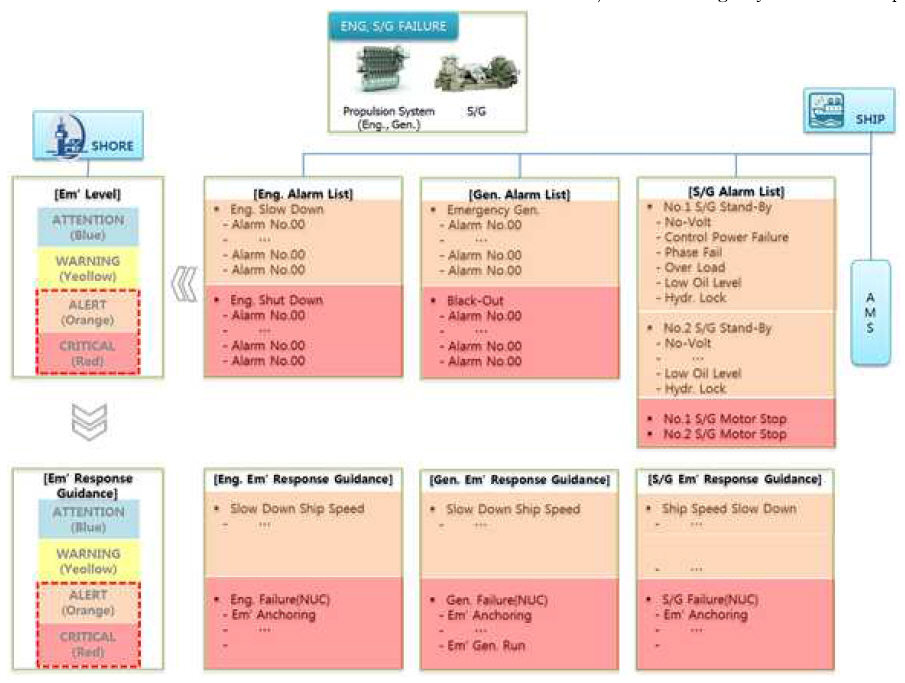
In the event of an engine failure, the vessel will be restricted from operating and the vessel will be inoperable or NUC condition, so the emergency level will skip the Attention/ Warning phase and proceed directly to the Alert/ Critical stage. Emergency response such as emergency anchoring and stop engine will be carried out according to the surrounding sea area and traffic situation.
Conclusions
The IMO e-Navigation includes sixteen MSP (Maritime Service Portfolio) service concepts as a proposed concept for safety, security and marine environment protection at sea. Korean e-Navigation, which was promoted to prepare for IMOŌĆÖs introduction of e-Navigation, has five service categories as a service concept that is specific to the Korean maritime situation reflecting IMOŌĆÖs MSPs. The Korean e-Navigation five service categories are: 1) S1 service - vulnerable ship monitoring support service, 2) S2 service - onboard system remote monitoring service, 3) S3 service - weather routing support service, 4) S4 service - small ship electronic chart service, 5) S5.1 service - pilot/ tug boat support service, 6) S5.2 service - marine safety information service. This paper focuses on the S2 service among the five service categories and mainly explains the operating concept of the navigation safety module in S2 service of Korean e-Navigation system.
The S2 service, which is the navigation safety module, is a ship anomaly monitoring service that monitors the risk of a ship due to abnormality in navigational equipment and machinery related equipment that may occur during navigation and could affect safe navigation. It consists of three sub-modules: safety index module/ emergency level determination module/ emergency response guidance module. The safety index module collects alarm data for each sensor in the event of an anomalous situation onboard, and calculates the navigation safety index according to the equipment abnormality. The emergency level determination module judges the emergency level of the ship by four categories based on the safety index calculated from the safety index module. The emergency level is classified into four levels of Attention/ Warning/ Alert/ Critical. The emergency response guidance module generates response guidance according to the identified emergency level and provides it to the abnormal vessel.
It is necessary to perform a ship test evaluation for the application of the Korean e-Navigation S2 service on the target ship in the future implementation.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






