선박운항자 의식 기반 충돌 위험도 예측 모듈 개발에 관한 연구
A Basic Study on Prediction Module Development of Collision Risk based on Ship’s Operator’s Consciousness
Article information
Abstract
우리나라 항구 주변에는 입․출항하는 선박으로 인하여 해상교통흐름이 복잡하다. 이러한 선박통항의 안전과 효율성을 증진하기 위 해 우리나라에서는 해상교통관제 서비스를 시행하고 있다. 24시간 쉴 틈이 없는 해상교통 관제사들의 노력에도 불구하고 관제구역 내에서의 충돌사고는 지속적으로 발생하고 있으며, 위험 상황이 약 20분에 1회씩 발생하고 있는 것으로 분석되어 그 위험성은 크다고 할 수 있다. 이러한 사고는 선박운항 및 해상교통관제 정보 제공 시 충돌 위험에 대한 안전 기준을 적시에 제공함으로써 사고를 감소시킬 수 있을 것으로 조사되었 다. 이에 본 연구는 선박의 충돌위험도를 선박운항자의 관점에서 평가할 수 있는 모델을 이용하여 그 위험을 선박의 속도, 침로 등을 조정하여 각 교통 상황별 충돌 위험도를 사전에 예측 할 수 있는 위험도 예측 모듈을 개발하였다. 이 모듈을 이용하여 선박운항자 및 관제사는 복잡한 교통 상황에서 위험요소를 쉽게 식별 할 수 있어, 가까운 장래의 위험 정도의 변화를 선박침로 및 속력변경 등을 제시할 수 있는 등의 적절한 피항조치를 취할 수 있다. 이 모듈의 효용성을 검증하기 위해 부산항 해역을 대상으로 조우 상황별 위험도를 예측 후 구체적인 침로 및 속력 변경에 따른 위험도 변화를 식별할 수 있는 것으로 확인되었다.
Trans Abstract
In ports of Korea, the marine traffic flow is congested due to a large number of vessels coming in and going out. In order to improve the safety and efficiency of these vessels, South Korea is operating with a Vessel Traffic Service System, which is monitoring its waters for 24 hours. However despite these efforts of the VTS (Vessel Traffic Service) officers, collisions are occurring continuously, the risk situation is analyzed that occurs once in about 20 minutes, the risk may be greater. It investigated to reduce these accidents by providing a safety standard for collision danger in a timely manner. Thus, this study has developed a risk prediction module to predict risk in advance. This module can avoid collision risk to adjust the speed and course of ship using a risk evaluation model based on ship operator’s risk perspective. Using this module, the ship operators and VTS officers can easily be identified risks in complex traffic situations, so they can take an appropriate action against danger in near future including course and speed change. To verify the effectiveness of this module, this paper predicted the risk of each encounter situation and confirmed to be capable of identifying a risk changes in specific course and speed changes at Busan coastal water.
1. 서 론
해상교통관제(Vessel Traffic Service, 이하 VTS)는 1993 년 포항항에 최초로 시스템이 도입된 이후, 경인항 및 아라 뱃길의 경인 VTS까지 우리나라 항만 15개소, 연안 3개소에 설치되어있다. 이 VTS는 선박의 통항을 모니터링 하며 통항 의 안전과 효율성을 증진하고, 일정한 범위 내에서는 안전 운항을 위한 조언 또는 필요한 정보를 제공하여 항만운영의 효율성을 높이는데 기여하고 있다(Park et al., 2013). 지난 10년간 항만 VTS 설치 전․후 개항 및 진입수로에서의 해 양사고 발생건수는 370건(2004년∼2008년)에서 404건(2009년 ∼2013년)으로 다소 증가하였으나, 관제범위 내 선박통항량 은 5년 동안 약 861,000척에서 약 1,052,000척으로 증가(KMI, 2013)하여 선박척수대비 사고 증가율은 낮아 VTS가 선박통 항의 안전을 증진하고 있다고 볼 수 있다. 그럼에도 불구하 고, 항만 VTS 관제구역 내 5년간 선박사고 통계 조사 결과 연간 평균 56.4건이 항만부근에서 지속적으로 발생하고 있는 것으로 조사되었다(Lee, 2011).
한편, 연안해역내에서 타 선박 및 장애물과의 충돌 등과 같은 상황을 피하기 위하여 선박에서는 주로 침로・선속을 변화시켜 이러한 위험상황을 회피하고 있다. 특히, 관제구역 내 위험 회피 시 선박운항자를 포함한 관제사는 대부분 1인 이 가까운 장래교통 상황을 최근접거리(CPA), 최근접시간 (TCPA)을 바탕으로 예상하여 정보 처리 및 적절한 행동을 취하고 있다. 하지만 가까운 장래에 대한 충돌 위험 정도의 안전기준이 상이하기 때문에, 이 충돌위험도 안전 기준의 가 이드라인을 VTS 관제사 및 선박운항자에게 적절하게 제공 함으로써 충돌 사고를 감소시킬 필요가 있다.
최근 국제해사기구(International Maritime Organization, IMO)에서는 2018년 e-Navigation을 시행하기 위하여 다방 면으로 연구 중이며, 우리나라는 실시간 안전항해지원 서비 스의 실험을 담당하고 있다. 이렇듯 육상으로부터의 안전항 해를 위한 지원 방안 마련이 절실한 시점이다. 이러한 안전 항해를 위한 충돌위험도 식별 알고리즘은 주로 퍼지이론 등 이 이용되고 있으나, 이 이론은 선박간 최근접거리 및 시간 을 바탕으로 충돌위험을 추론하고 있다(Son, Kim, 2009: 2010). 해상에서 선박을 운항하는 주체는 운항자이므로 선박 운항자가 느끼는 가까운 장래교통 상황에 대한 위험도에 대 한 정보제공이 중요할 것으로 판단된다. 이번 연구는 우리나 라 선박운항자가 느끼는 위험도를 설문조사(Heo, 2012) 및 선박조종 시뮬레이션 검증(Park et al, 2013) 등을 통하여 개 발하여 최근접거리 및 최근접시간을 통하여 위험도를 최종 계산하는 PARK (Potential Assessment of Risk) 모델 (Nguyen, 2014)을 사용하고자 한다.
이 연구에서는 관제 구역에서 항행하는 선박의 선속 및 침 로 변경에 의한 위험도 예측 계산을 통하여, 충돌 위험상황 을 감소시키기 위한 적정한 정보를 제공하고자 VTS 관제용 충돌 위험도 예측 모듈을 제안하고자 한다. 이 연구에서 제 시된 충돌 위험도 예측 모듈을 부산항 해역에 적용하여 충돌 위험 상황을 감소시킬 수 있는 지를 실제 해역에서 검증하여 이 모듈의 효용성을 제시하고자 한다.
2. 기존 충돌 위험도 판별법
선박운항자의 위험도를 기반으로 한 충돌위험도 예측 모 듈을 구축하기 위하여 선박 및 관제실에서 사용 중인 기존의 충돌위험도 판별법을 고찰하고자 한다.
2.1. Radar를 이용한 충돌 위험 판별법
선박에서 사용하는 RADAR에는 알파 기능이 있어 타선의 위험도를 최근접거리 및 최근접시간으로 Fig. 1과 같이 판별 하며, 식(1), (2)로 산출할 수 있다.

Concept of CPA and TCPA
여기서, θA : Aspect of other ship(degree)
θR : Other ship’s relative course(degree)
VR : Other ship’s relative speed(kts)
Radar의 충돌위험 판별법 중 트라이얼(Trial) 기능은 위험 선박 및 장애물이 나타났을 때 충돌을 피하기 위하여 선속과 침로를 조정하여 임의로 선박을 움직여 보는 기능이다(JRC, 2009). 트라이얼 기능을 이용하면 선박의 선속과 침로의 조 정에 따라 장래에 발생하게 될 위험한 상황에 대하여 예상할 수 있으나, 예상된 위치에서 타선과 본선과의 충돌 위험도를 판별하는 것은 선박운항자의 주관적인 판단에 따른다.
2.2. VTS 운용시스템에 의한 충돌 위험 판별법
현재 우리나라 VTS 관제센터에서 가장 많이 사용되고 있 는 N사의 VTS 운용시스템 중 타선박의 위험정도를 확인할 수 있는 최근접거리 및 최근접시간 확인 기능은 Fig. 2와 같 다(Bente, 2009).
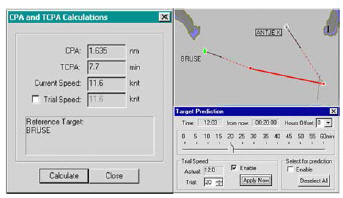
VTS5060 System for VTS Officer(Busan VTS)
N사의 VTS 운용 시스템은 선박 간 위험 관계를 관제사가 객관적인 정보를 이용하여 위치를 예측하여 주관적으로 위험 을 판단하여 사용하고 있어, 사용자에 따라 위험 판단 기준 이 상이하다. 이 운용 시스템을 이용하여 선박의 속력을 조 절하여 최근접거리 및 최근접시간의 정보를 얻을 수 있으며, 시간을 조절하여 일정 시간 뒤의 물표의 위치를 예측할 수가 있다. 하지만, 예측된 위치에서의 선박간의 충돌 위험도를 판 별하는 것은 관제사의 개인 판단으로 결정하고 있다.
3. 선박운항자 의식 기반 충돌 위험도 예측 모듈
3.1. 해상교통관제 시 충돌 위험도 예측 필요성
VTS 관제사들의 관제 당직 시 선박 간 충돌위험 상황이 어느 정도 발생하고 있는 지를 파악하고자 우리나라에 선박 통항량이 가장 많은 부산항, 부산신항, 울산항 그리고 마산항 의 VTS 관제사 65명을 대상으로 설문조사를 실시하였다.
먼저, VTS 당직근무(2시간)시간 동안 관제구역 내에서 선 박이 근접하여 야기되는 위험한 순간의 발생 횟수에 대한 조 사 결과는 Fig. 3과 같다.
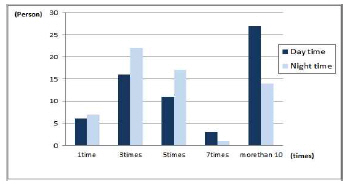
No. of Dangerous Moment on Duty Time of VTS
VTS 관제사들이 주간 근무시간(2시간단위) 중에 선박이 근접하여 야기되는 위험한 순간은 주간 평균 6.3회 야간 평 균 5회로 조사되어 주간에는 평균 19분마다 야간에는 평균 24 분 마다 위험한 교통 상황이 발생하고 있는 것을 알 수 있다.
Fig. 4는 관제구역 내 관제사가 선박 간에 근접하는 위험 한 상황을 인지 또는 예측하는 방법을 나타낸 것이다.
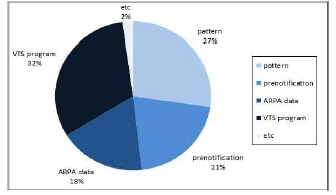
Methods to recognize Dangerous Moments
관제사의 32%는 관제프로그램 내의 CPA 및 TCPA를 통 해, 27%는 경험에 의한 패턴에 따라, 21%는 선박의 출입항 예보를 통해, 18%는 레이더 ARPA(Automatic Radar Plotting Aids) 기능을 통하여 선박이 근접하는 상황을 예측 하고 있는 것으로 조사되었다. 이러한 선박 근접상황의 위험 도를 예측하는 방법은 수신된 정보를 바탕으로 하여 관제사 의 경험을 더하여 판별하는 방법이므로 정형화 되지 않은 주 관적인 위험도 판별법이라 할 수 있다.
이러한 VTS는 해양사고 건수는 줄였지만, 관제구역내에 서 충돌 위험상황이 지속적으로 발생하고 있는 것으로 분석 되었다. Fig. 5는 이를 해결하기 위한 방안으로 충돌 위험예 측 모듈 필요성과 이 모듈이 실제 선박을 관제하는데 도움이 되는지에 대한 효용성을 조사한 결과를 나타낸 것이다. 충돌 위험도 예측 모듈의 필요성에 대하여 긍정적으로 답한 관제 사는 41명(68.3%), 효용성에 대하여도 39명(66.1%)이 도움이 될 것이라고 하였다. 전체적으로 모듈의 필요성과 효용성에 대해서는 절반이상의 관제사가 긍정적인 답변을 하였다.

Necessity and Utility of Prevention Model
3.2. 선박운항자 의식 기반 충돌 위험도 예측 기능 구축
충돌위험도 평가모델은 PAWSA, IWRAP, ES model 등 여러 가지가 있지만(Kim, 2014), 이번 연구에서는 우리나라 의 실제 연안해역을 항해하는 선박운항자가 느끼는 위험도를 대상으로 하여 구현된 식(3)과 같은 위험도 평가 모델 PARK(The Potential Assessment of Risk) Model을 이용하 고자 한다(Nguyen, 2014). 이 모델은 본선 선박 종류(type), 톤수(ton), 선박길이(length), 선박 폭(width), 타선이 접근하 는 각도(crossing factor) 및 방향(side factor), 항내 및 항외, 선박간 속력 차이, 선박간 거리, 운항자의 경력, 직급, 면허 등을 고려하였다.
여기서, Tp : own ship's type factor
Tf : own ship's ton(GT) factor
Lf : own ship's length(m) factor
Wf : own ship's width factor(m)
Cf : own ship operator's career factor
Lof : own ship operator's license factor
Pf : own ship operator's position factor
L : target ship's LOA (m)
Cf : approaching crossing factor of target ship
Sf : approaching side factor of target ship
Hi/o : in/out harbor factor of own ship
Sp : speed(kt) factor between ships
Sd : speed(kt) difference between ships
D : distance between ships (NM)
위의 식(3)에서 계산된 위험도 값 중 1~3은 안전하다고 식별된 상황, 3~5은 안전하지도 위험하지도 않은 상황, 5이 상은 위험한 상황으로 구분하여 판단한다.
(1) 침로 변경에 따른 위험도 예측 기능 구축
선박에서는 위험상황 발생 시에 제일 먼저 침로 변경에 의 하여 위험 상황을 회피할 수 있으므로, 침로 변경에 따른 충 돌 위험도 예측값을 제시하여 선박에게 안전 정보를 제공할 수 있는 기능을 구축하였다. Fig. 6은 부산신항 해역에서 출 항선(A선박)과 입항선(B선박)이 조우할 경우 출항선(A선박) 이 현재 상황(‘NOW’로 표시)과 가덕수도 방향으로 항해하기 위하여 20도씩 침로 변경에 따른 위험도와 최근접거리 및 최 근접시간을 표시할 수 있도록 구축된 것을 보여주고 있다.
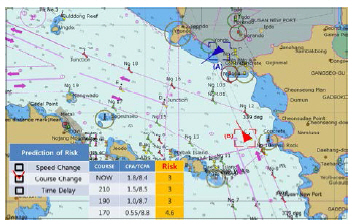
Collision Risk Prediction Value Module by Course Control
(2) 속력 변경에 따른 위험도 예측 기능 구축
선박이 연안해역을 항해중일 경우에는 Stand-by 기관 상 태로 항해하고 있어 위험상황 발생 시에 선박의 속력을 조정 하기 수월하다. 이 선박 속력 조정에 의한 충돌 위험도 예측 값을 제시하여 통항 선박에게 안전 정보를 제공하는 기능으 로 이러한 선박 속력 조정에 따른 충돌위험도 설계 개념도는 Fig. 7과 같다. 이 그림은 부산항 출항선(C선박)과 입항선(D 선박)과 부산항 방파제 부근에서 조우할 경우(‘NOW’로 표 시) 속력 감소에 따른 위험도와 최근접거리 및 최근접시간을 표시할 수 있도록 구축된 것을 보여주고 있다.
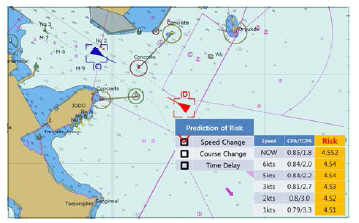
Collision Risk Prediction Value Module by Speed Control
(3) 침로․속력 변경에 따른 트라이얼 기능 구축
위험 상황 발생 가능성이 있을 경우 선박 속력 및 침로 변 경에 따라 일정 시간 후의 선박 이동 상황을 한눈에 볼 수 있도록 트라이얼 기능을 설계 하였다.
Fig. 8은 부산신항 접근수역에서 출항선(E선박)과 입항선 (F선박)이 주의해역에서 마주칠 경우를 예상하여 현재의 속 력 및 침로로 일정시간(6분) 이후의 출항선 E'위치, 입항선 F'위치에서의 위험도와 최근접거리 및 최근접시간을 표시한 것이다. 이러한 침로․속력 변경에 따른 트라이얼 기능을 통 하여 가까운 장래의 선박 위치를 통하여 위험정도를 확인할 수 있다.
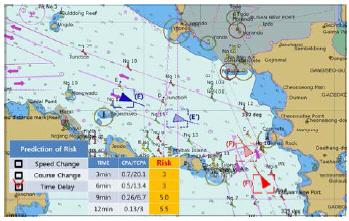
Collision Risk Prediction Value Module by Trial
3.3. 부산항 관제 해역의 적용
2009년부터 5년간 우리나라 VTS 관제구역 내 충돌사고가 39건(29.7%)으로 가장 많았던 부산항을 대상으로(kmst, 2014) 연안해역의 선박 충돌 위험도 예측 모듈을 적용하여 효용성을 확인하고자 한다. 이를 위하여 부산항 인근 해역에 통항하는 선박에 대하여 2014년 7월 중 24시간 동안 통항선 박 조우 상황에 따른 위험도를 분석하였다. 24시간 동안의 부산항 부근을 항해한 선박 항적도는 Fig. 9와 같으며, AIS 정보로 획득한 선박은 총 3,508척이었다.

Vessels Track near Busan Port for 1 day
AIS를 통하여 수집한 선박의 정적․동적 정보를 바탕으로 1척 대 1척의 단순한 조우상황에 대한 위험도 예측과 1척 대 다수의 척수의 다중조우상황의 위험도 예측 두 가지 상황으 로 구분하여 분석하였다. 단순한 조우상황은 2척의 선박간에 1척의 선박이 피항동작을 취하면 충돌상황을 회피할 수 있는 상황을 말한다. 다중 조우상황은 선박이 피항동작을 취하면 가까운 충돌상황을 회피할 수 있지만, 피항 직후에 그 피항 동작에 의하여 2차, 3차의 다른 선박과 근접하는 조우 관계 가 발생하는 상황을 말한다.
(1) 단순한 조우 상황의 예측
Fig. 10, 11은 조사기간 동안 부산항 관제 해역 내에서 발 생한 선박 통항 위험도 5.0(위험상태) 이상이 산출 된 2가지 단순 조우 상황 사례를 나타낸 것이다. 이 그림의 Case 1은 부산항 출항선 G(129°, 5.3kts)와 주위 통항 타선박 H(314°, 9.6kts)가 마주보는 형태(Head on)로 조우하는 상황이며, Case 2는 부산항 출항선 I(117°, 5.2kts)이 주위 통항 타선박 J(284°, 5.8kts)를 좌현에서 교차하는 형태(Crossing)로 조우 하는 상황이다.
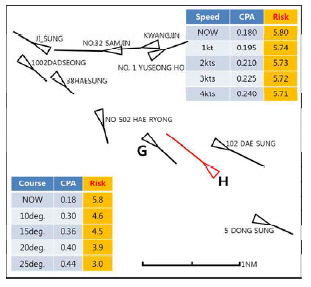
Simple Encounter Situation(Case 1)

Simple Encounter Situation(Case 2)
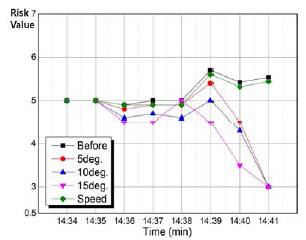
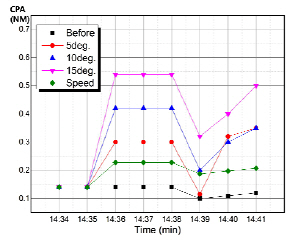
Fig. 12는 Case 1 상황에서 G선박이 그대로 진행하였던 경우(‘Before’로 표시)와 침로변경(10도~25도)ž속력변경(5kts 감속)으로 인한 예측 위험도를 시계열로 나타낸 것이다. 단 순 조우의 경우, 본선의 변침 및 변속 이후에는 CPA가 일정 함으로 상황별 CPA의 수치를 기술하였다. 우현 10도 변침 으로 위험한 조우상황을 피할 수 있었으며, 변침각이 커질수 록 위험도가 낮아지며 CPA가 증가하는 것을 알 수 있었다.
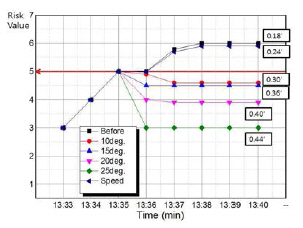
Change of Risk Value and CPA(Case 1)
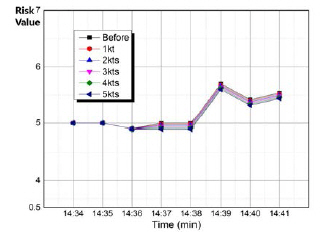
Fig. 13은 Case 1의 G선박 속력변경(1kt~5kts 감속)에 따 른 위험도 변화를 시계열로 나타낸 것이다. 속력변경은 침로 변경과는 달리 위험도의 값에 큰 영향을 미치지 못하는 것으 로 분석되었다. 속력 변경 전의 CPA는 0.18NM 이였으며, 1kt당 CPA 변화량은 0.015NM이였다. 이는 마주보는 상황에 서는 선박 속력은 조우하는 시간을 늦출 뿐 타 충돌 위험성 의 감소 역할을 하지 못하기 때문으로 사료된다.
Change of Risk Value by Speed(Case 1)
Fig. 14는 Case 2 상황에서 I선박이 그대로 진행하였던 경 우(‘Before’로 표시)와 침로변경(15도~30도)ž속력변경(5kts 감속)으로 인한 예측 위험도를 시계열로 나타낸 것이다. 단 순 조우의 경우, 본선의 변침 및 변속 이후에는 CPA가 일정 함으로 상황별 CPA의 수치를 기술하였다.
Change of Risk Value and CPA(Case 2)
우현 20도 변침으로 위험한 조우상황을 피할 수 있었으며, 변침각이 커지면 커질수록 위험도가 낮아지며 CPA가 증가 하는 것을 알 수 있다. Case 2는 횡단하며 조우하는 상황으 로 선박 속력변경만으로 충돌 위험도가 낮아지는 것으로 나 타났다. 이는 I 선박이 속력을 감속하는 경우 J 선박이 I 선 박의 전방으로 먼저 통과하는 경우가 발생하기 때문이다.
Fig. 15는 Case 2의 I 선박 속력 변경(1kt~5kts 감속)에 따른 위험도 변화를 시계열로 나타낸 것이다. 속력변경전의 CPA값은 0.14NM 이며, 1kt당 CPA값의 변화는 0.02NM으로 거의 변화가 없었다. 그러나 선박속력을 기존보다 4kts이상 감속하였을 경우 에는 선박 간 이격거리가 멀어 위험도 값이 떨어지는 것으로 판 단된다. 하지만, 멀리서 통항하는 타 선박의 영향으로 위험도는 일정 값을 유지하고 있는 것으로 분석되었다.

Change of Risk Value by Speed(Case 2)
(2) 다중 조우 상황의 위험도 예측
Fig. 16, 17은 부산항 관제해역 내에서 다수의 선박 간 조 우로 인하여 위험도가 5.0(위험상태)이상이 산출된 다중 조우 상황의 2가지 사례를 나타낸 것이다. Case 3은 부산항에 입 항하는 L선박이 주위 여러 선박과 마주보는 형태로 조우하 는 상황이며, Case 4는 부산항을 출항 후 M선박이 많은 타 선박과 좌현에서 교차하는 형태로 조우하는 상황이다.
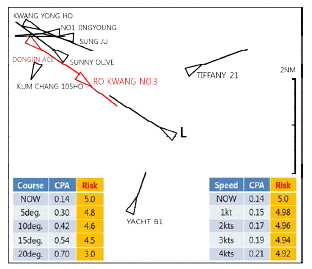
Multiple Encounter Situation(Case 3)
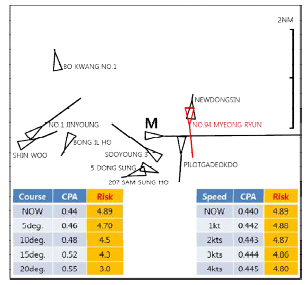
Multiple Encounter Situation(Case 4)
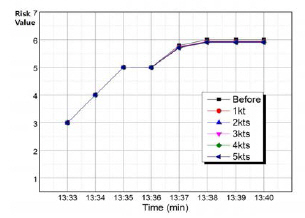
Fig. 18은 Case 3 상황에서 L선박이 그대로 진행하였던 경우(‘Before’로 표시)와 침로변경(5도~15도)ž속력변경(5kts 감속)으로 인한 예측 위험도를 시계열로 나타낸 것이다. 우 현 5도로 변침으로 위험한 조우상황을 피할 수 있었으나, 변 침으로 인하여 14:39에 뒤따라오는 선박과 위험도 5.0(위험상 황)이상의 상황을 형성하였다. 10도, 15도의 변침으로는 위험 한 조우 상황을 회피하고 14:39에 뒤따라오는 선박과 위험도 5.0이상의 상황은 발생하지 않았다.
Change of Risk Value(Case 3)
Fig. 19는 Case 3의 L선박 CPA의 변화량을 시계열로 나 타낸 것이다. CPA는 선박의 변침 정도에 따라 증가하다가 14:39 뒤따라오는 선박에 의하여 잠시 근접하였고, 다시 타선 의 움직임에 따라 멀어지는 것을 확인할 수 있다.
CPA Change by Time(Case 3)
Fig. 20은 Case 3의 L선박 속력변경(1kt~5kts 감속)에 따 른 위험도 변화를 시계열로 나타낸 것이다. L선박이 마주치 는 선박들과 조우하였을 경우 위험을 피하려고 속력을 감속 하였으나, 위험도 변화에 큰 영향을 미치지 못하였다.
Change of Risk Value by Speed(Case 3)
Fig. 21은 Case 3의 L선박 속력변경(1kt~5kts 감속)에 따 른 CPA 변화를 시계열로 나타낸 것이다. 속력 감속이 클수 록 CPA가 다소 커지는 것을 볼 수 있지만, 현저한 차이는 없는 것을 알 수 있다.

Change of CPA by Speed(Case 3)
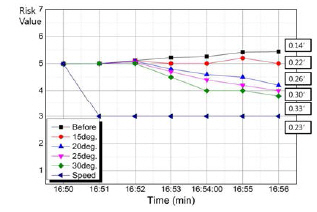
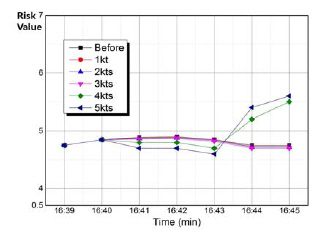
Fig. 22는 Case 4 상황에서 M선박이 그대로 진행하였던 경우(‘Before’로 표시)와 침로변경(10도~20도)ž속력변경(5kts 감속)으로 인한 예측 위험도를 시계열로 나타낸 것이다. 좌 현 10도~20도 변침으로 위험도를 감소시켜 항행하고 있다가 16:43경 횡단하는 선박과 조우하여 위험도 5.0(위험상황)이상 의 상황이 발생하였다. 속력 변경으로 위험도가 다소 감소하 였으나, 횡단선박과 조우하여 위험도 5.0이상의 상황이 발생 하였다.
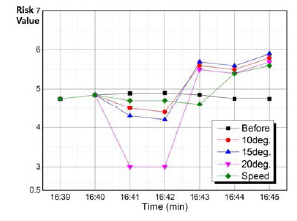
Change of Risk Value(Case 4)
Fig. 23은 Case 4의 M선박 CPA 변화량을 시계열로 나타 낸 것이다. CPA는 침로를 변경하였을 때 잠깐 증가하였다가, 횡단선박과 다시 조우하였을 때 다시 작아지는 것을 볼 수 있다. Case 4 상황에서는 침로와 속력을 변경하지 않은 채 항행하는 것이 위험도가 낮은 항행 방법임을 알 수 있다.

CPA Change by Time(Case 4)
Fig. 24는 Case 4의 M선박 속력변경(1kt~5kts 감속)에 따른 위험도 변화를 시계열로 나타낸 것이다. 1kt~3kts의 속 력 변화는 처음 상태와 비슷한 위험도를 나타내고 있으며, 4kts이상의 감속 상태에서는 횡단하는 선박과 조우하는 관계 가 되어 오히려 위험도 5.0이상의 상황이 되었다.
Change of Risk Value by Speed (Case 4)
Fig. 25는 Case 4의 M선박 속력변경(1kt~5kts 감속)에 따른 CPA 변화를 시계열로 나타낸 것이다. 3kts 속력 감속 까지는 CPA의 변화에 크게 영향을 끼치지 못하지만, 4kts∼ 5kts의 속력 감속으로 타선박과 가까운 조우상황이 발생하는 것으로 분석되었다.
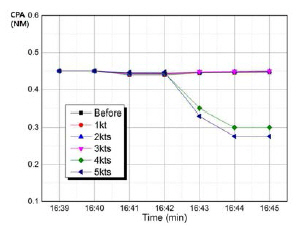
Change of CPA by Speed(Case 4)
타선과의 조우 상황에서 침로 변경 시 변침각이 커질수록 위험도가 낮아지고 CPA가 멀어지는 것을 확인할 수 있었다. 그러나 변침각에 따라 2차 근접 조우관계가 발생하는 경우가 있어, 속력변경으로는 단순 마주보는 선박과 조우 시에는 위 험도 변화에 큰 영향을 미치지 못하였다. 그리고, 횡단 선박 이나 다중 조우 상황의 경우, 시간에 따라 조우관계가 발생 하지 않거나 다른 조우관계가 발생하는 등 복잡한 상황이 발 생하여 위험도 5.0(위험상황)이상의 상황을 발생시킬 수 있음 을 확인하였다. 이는 선박 속력 또는 침로 변경 유무를 통하 여 본선에게 가장 위험도가 낮은 안전항행 방법을 제시하여 충돌 위험성을 낮출 수 있다고 할 수 있다.
4. 결 론
우리나라 연안 및 항만의 해상교통관제 설치 이후 선박증 가 척수대비 사고 발생율은 낮지만, 관제구역내의 해양사고 발생은 지속적이며, 이 중 교통관련사고의 발생률이 전체의 약 75%에 해당할 정도로 높다. 이러한 사고를 감소시키기 위 하여 해상교통관제사 등은 선박간의 위험정도를 예측하여 선 박에게 적절한 행동을 취할 수 있도록 지원할 필요가 있다. 또한 최근 e-Navigation 제도 시행을 위하여 육상으로부터의 선박안전 통항을 위한 지원방안 마련이 절실히 필요한 시점 이다. 이 연구는 선박에서 타 선박과 조우할 경우에 선박의 침로 및 선속 변경에 의한 예측 위험도 산출 모듈을 운항자 위험도 기반으로 개발하고, 부산항 관제구역에서 적용하여 위험상황을 감소할 수 있는지를 검증하였다. 이 연구의 결론 은 정리하면 아래와 같다.
(1) 관제구역내의 위험한 조우상황은 시간당 약 3회는 발 생하고 있어, 이에 대한 관제는 관제사가 객관적 데이 터로 위치를 예측하여 주관적으로 위험을 판단하여 사 용하고 있어, 사용자에 따라 위험 판단 기준이 상이한 것으로 조사되었다.
(2) 이러한 위험상황 인지를 위한 충돌위험 예측 모듈의 개발 필요성에 대하여는 다수의 관제사가 필요할 것이 라 하였다.
(3) 운항자 위험도 기반 충돌 예측 위험도로 제시된 모듈 은 침로 또는 속력 변경 유무 등에 따른 충돌 예측 위 험도를 표시할 수 있도록 설계되었다. 이 모듈을 부산 항 관제구역 내에 적용하여, 위험한 조우상황을 식별 하였고, 이 위험 상황에서의 예측 상황을 통하여 위험 도를 감소할 수 있는 선박 침로와 속력 등을 파악할 수 있었다.
추후에는 이러한 충돌위험도 예측 모듈을 해상교통관제실 의 현장에 설치하여 관제사의 의사 결정에 어떻게 도움이 되 는지와 관제사의 인지적 부하 증가 정도 등에 대하여 분석하 여 그 실효성을 입증하고자 한다. 또한 선박이 외력의 영향 등으로 예측 위치에서 다소 멀어질 경우도 있으므로 선박의 운동방정식을 반영한 예측 기능을 가미하는 연구가 필요할 것으로 판단된다.