구속모형시험을 이용한 잠수함의 동유체력 계수 추정 및 동안정성 평가
Estimation of Hydrodynamic Derivatives and Dynamic Stability for Submarine Using Captive Model Test
Article information
Abstract
최근 국내외적으로 수중 유도무기체계 개발로 다양한 형태의 수중운동체 기술이 발전되고 있다. 특히 수중운동체 중 하나인 잠수함 은 한국의 특수한 상황에서 최적의 선형설계를 위한 신뢰도 높은 조종성 평가 기술이 요구되며, 이를 위한 정확한 동유체력 계수의 추정 또한 중요한 연구 분야라 할 수 있다. 따라서 본 논문에서는 잠수함 모형을 대상으로 구속모형시험인 VPMM (Vertical Planar Motion Mechanism) 시험을 실시하여 정밀도 높은 동유체력 계수를 추정하였다. 그리고 추정된 연직면 운동에 대한 선형 (Linear) 동유체력 계수 (Hydrodynamic derivatives)들을 이용하여 동안정성 (Dynamic Stability)을 판별하였다. 그 결과, 이론추정치와의 비교를 통해 동유체력 계수의 타당성이 검증 되었으며, 잠수함의 연직면 동안정성도 양호한 것으로 평가되었다. 즉, 무한수심으로 정의되는 심도 6.0의 깊은 수심으로 갈수록 주기에 따른 변화가 작아지며, 이론추정치에 근사함을 확인할 수 있었다. 한편 연직면 동안정성 판별에 있어서는, 0보다 큰 양(+)의 값을 가짐으로서 연직면 운동에 대한 동안정성을 만족하는 것으로 나타났다.
Trans Abstract
In these days, the world has been increasing the development of various underwater vehicles such as ROVs (Remotely operated underwater vehicles) and AUVs (Autonomous underwater vehicles). And the importance of submarine‘s maneuverability is especially being emphasized. Therefore, accurate values of the derivatives in equations of motion are required to control motion of the submarines. The aims of the present study are to experimentally derive Hydrodynamic derivatives derived by the vertical planar motion mechanism (VPMM) model test, and to estimate vertical dynamic stability was estimated by using the linear hydrodynamic derivatives, the hydrodynamic derivatives of the submarine, which have a high propriety, were provided by using the fourier analysis of measured forces and moments. Furthermore it is confirmed that the experimental derivatives shows well agreement with the theoretical estimations, and the dynamic stability of the submarine was estimated as a good state, which implies that the value is greater than zero.
1. 서 론
해양에 존재하는 광물 자원의 탐사 및 채취, 수중탐사 및 작업, 해양 방위력의 증강 등은 수중운동체의 개발 필요성을 더욱 증가시키고 있으며, 특히 최근 한국의 특수한 상황에서 수중운동체 중의 하나인 잠수함에 대한 연구가 활발하게 진행 되고 있다. 그리고 잠수함의 긴급 기동을 위한 정밀한 동유체 력 미계수에 대한 정확한 정보는 잠수함 운동조종제어에 있어 필수 요소가 되고 있다. 특히 초기의 개념설계 단계에서 전술 및 기술적 요구성능을 만족하는 신뢰성 있는 잠수함 선형과 기본 데이터를 제공하는 것이 매우 중요하다.
한편, 국내의 구속모형시험과 유체력 계수 추정에 관한 연 구사례를 살펴보면, 수상선을 대상으로 한 구속모형시험 (Yun and Kim, 2012)을 한 바가 있으며, 수중함 모형의 유체 력 미계수 추정에 관한 연구 (Shin and Lee, 2005) 등에 대한 연구사례를 찾아볼 수가 있다.
또한, VPMM (Vertical Planar Motion Mechanism) 시험에 대한 신뢰성 측면에서 문헌을 살펴보면, 스페로이드 (Speroid) 를 대상으로 VPMM 시험을 수행한 Lee et al. (2009)에서 이 미 검증된 바가 있다. 한편, 본 연구에서와 같이 잠수함을 대 상으로 VPMM 시험기법을 이용한 유체력 추정과 동안정성 평가는 국내에서 드문 연구사례라 할 수 있다.
본 논문은 Jung et al. (2014)에서 수행된 과제의 일환으로 기존 Strut의 형상을 타원체에서 직경 4cm의 봉 형상으로 교 체하여 저항을 최소화함으로서 데이터의 정밀도를 더욱 향상 시켰으며, 실험조건은 심도와 주기에 있어 세 개에서 네 개로 각각 추가함으로서 심도와 주기에 따른 경향을 더욱 정밀하게 살펴보고자 하였다. 그리고 실험은 부산대학교 선박예인수조 에서 수행되었으며, 수중운동체용 구속모형시험장치를 이용하 여 잠수함의 정밀도 높은 동유체력 계수를 추정하고자 하였 다. 또한 추정된 유체력 계수는 Feldman (1979)의 운동방정식 에 포함된 선형계수이며, VPMM 시험에 의해 도출된 유체력 계수들을 이론추정치와의 비교를 통해 적정성을 논의하였고, 연직면 운동에 대한 선형 동유체력 계수를 이용하여 잠수함의 동적 안정성 (Dynamic Stability) 평가를 수행하고자 하였다.
2. 시험 목적 및 개요
본 실험에서의 VPMM 구속모형시험은 모형을 예인하며 동 시에 연직면상의 정현운동을 부가하여, 히브-피치 (Heave-Pitch) 에 관련된 부가질량 및 부가 관성모멘트와 감 쇠력 및 감쇠모멘트 계수를 추정하는 시험이다. 즉, 모형 시험 을 통해 잠수함 유체력 계수들 중 속도와 가속도에 관련된 선 형계수들 Zw , (EQ), Mw , (EQ) , Z q , (EQ) , Mq , (EQ) 를 추정한다.
본 시험개요는 분력계와 잠수함 모형을 VPMM 장비의 스 트럿 (Strut) 끝단에 부착 및 설치하여 예인전차를 일정속도로 직진 운행한다. 그리고 순수 상하동요와 순수 종동요 운동을 구현하여 계측된 데이터는 Fig. 1에 흐름도와 같이 일련의 과 정을 통해 해석된다. 장비형태는 Fig. 2에 나타낸 바와 같으며 분력계는 스트럿의 하방향 끝단에 부착되고 모형의 미드쉽 (midship)으로부터 전후 300m위치의 내부에 설치되게 된다. Pitch 운동의 경우, θ가 적용됨으로서 선미의 1분력계는 슬라 이딩 형태로 구성되며, 순수 종동요가 원활히 구현될 수 있도 록 하였다.
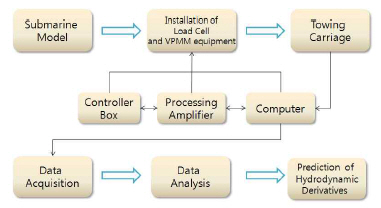
Flow chart for VPMM test
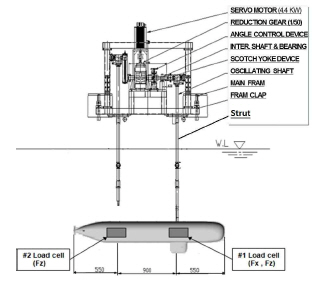
Conceptual diagram of VPMM equipment
3. 시험 및 해석 방법
3.1. 좌표계 & 운동 방정식
잠수함의 운동을 표현하기 위해 지구고정좌표계와 물체고 정좌표계를 Fig. 3과 같이 설정하였다.
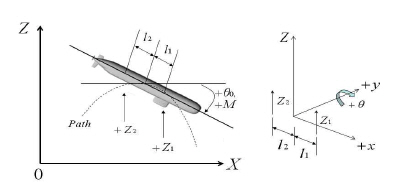
Coordinate system for submarine model
모형 전후에 위치한 스트럿 (Strut)에 걸리는 히브력 (Heave Force) Z1 , Z2를 이용하여, 모형 전체에 걸리는 히브력 은 ZE = Z1 + Z2, 모형 전체에 걸리는 피치 모멘트 (Pitch Moment)는 ME = -Z1 l1 + Z2 l2로 구해진다. 여기서, 분력계 는 스트럿의 끝단에 고정되어 있어 계측된 힘의 방향이 스트 럿과 동일함으로 측정된 힘과 모멘트는 피치각 (θ)에 의해 다 음 식 (1)로서 최종적으로 구할 수 있게 된다.
Feldman (1979)의 6자유도 운동방정식에서 선형항만 고려 하였을 경우, 히브-피치 연성 운동방정식은 식 (2)와 같다. 여 기서 m은 잠수함의 질량, U는 잠수함의 합속도, xG는 x축 방 향의 무게중심,
3.2. 순수 상하동요 시험
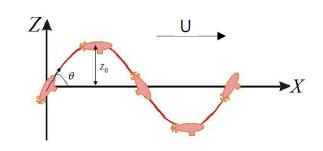
순수 상하동요 시험 (Pure heave test)은 종동요 운동을 하 지 않고, 그 중심의 궤적이 정현파의 모양으로 변화하며 상하 동요 운동을 하는 것을 의미한다. 그리고 Fig. 4에 운동방향과 형상을 나타내었다.
Pure heave motion
여기서 θ는 종동요각, q는 종동요 각속도,
따라서 식 (3)을 식 (2)에 대입하여 정리한 후 식 (4)와 등 치하면 식 (5)와 같이 정리된다.
3.3. 순수 종동요 시험
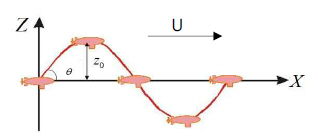
순수 종동요 시험 (Pure pitch test)은 선체 중심궤적이 정 현적으로 운동하고, 선체가 정현적인 종동요 운동을 한다. 또 한 종동요 운동 방향과 형상을 Fig. 5에 나타내었다.
Pure pitch motion
여기서 θ0는 초기 피치 각운동의 진폭을 나타낸다.
그리고 식 (7)과 같이 성분 분리 후, 식 (6)을 식 (2)에 대입 하여 정리한 것과 등치하면 식 (8)과 같이 정리된다.
3.4. 푸리에 (Fourier) 해석
동적시험의 경우에 실제 로드셀에서 계측된 신호에는 모형 선에 작용하는 유체동력학적 관성력과 감쇠력이 포함되어 있 어 이를 분리하여 수학모형에 맞는 유체력 미계수를 구할 수 있다. 따라서 계측된 신호를 푸리에 사인 (Sine) 또는 코사인 (Cosine)변환을 하고 1주기까지 적분하면 식 (9)와 같이 된다.
여기서 ZE는 실험에서 계측된 신호이고 T는 주기이다. Z in 은 변위와 같은 위상을 갖는 관성력과 부가질량력을 포함한 힘이고 Zout은 변위와 90°의 위상차를 갖는 감쇠력이 된다. 그 리고 ME 에 관해서도 동일한 방법으로 해석을 하게 된다.
4. 시험결과 및 해석
본 실험의 잠수함 모형은 함체, 함수 수평타, 함미 수평 및 수직타 그리고 사령탑 (Conning Tower)으로 구성되어 있는 형태이다. 잠수함 모형의 기본 제원은 Table 1과 같다.

Principal dimension of submarine model
잠수함 모형의 심도에 대한 정의는 수면에서 모형 중심까 지 깊이와 모형 직경의 비 (H/D)로 나타낸다. 그리고 실험조 건은 Table 2와 같이 정리하였다.

Test condition
또한 유체력 미계수를 무차원화하여 나타낼 수 있으며 기 호로서 위첨자 프라임 (′)으로 표시한다. 그리고 무차원 방법 은 SNAME (1950)의 프라임 시스템 (Prime-ⅠSystem)을 채 택하여 사용하였다.
4.1. 순수 상하동요 시험 결과
심도별 및 주기별 VPMM 실험을 실시한 후 유체력 미계수 를 산정하여 그 결과를 Fig. 6에 나타내었다. 그리고 이론적 추정치는 Shin (2005)에 의한 유체력 모델링을 근간으로 추정 한 계수결과를 이용하기로 한다. 그리고 이론추정치에 관한 세부적인 이론과 추정과정은 본고에서는 논외로 하며, 계산되 어진 계수결과만을 이용하여 Ref.1 (이론추정치)로서 결과 그 래프에 표기하여 함께 나타내기로 한다.
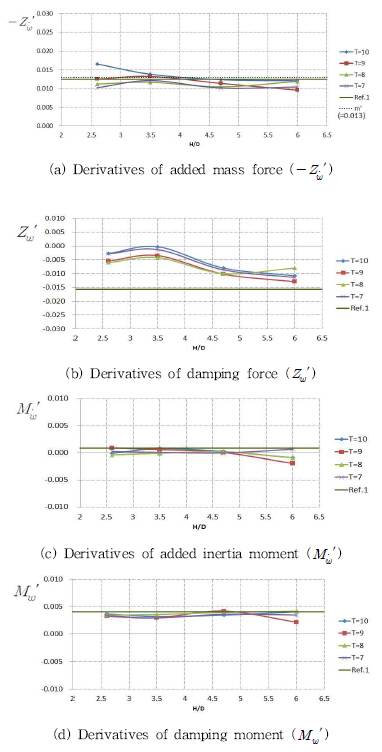
Hydrodynamic derivatives for depth & period
부가질량, 부가관성모멘트 그리고 감쇠모멘트는 이론추정 치에 근접한 값으로서 적정한 값을 보이고 있으나, 감쇠력의 경우 얕은 수심에서 다소 차이를 보이고 있고 깊은 수심으로 갈수록 음 (–)의 방향으로 증가함을 보여준다. 주기에 따른 경향은 모두 근사한 값을 나타내고 있으며, 모멘트의 경우 이 론추정치와 유사한 경향을 보이고 있다. 감쇠력 계수 Zw′의 경우, 깊은 수심에서 이론치에 근접하고 있고, 다른 계수들에 있어서도 전반적으로 주기에 따른 큰 변화 없이 이론치와 유 사한 경향을 보이고 있다. 따라서 수심이 깊을수록 자유수면 의 영향이 없는 안정되고 신뢰할 만한 적정한 값을 제공함을 확인할 수 있다.
4.2. 순수 종동요 시험 결과
순수 종동요 시험에 대한 심도별 및 주기별 시험을 실시한 후 유체력 미계수를 산정하여 그 결과를 Fig. 7에 나타내었다. 그리고 순수 상하동요 시험과 마찬가지로 이론추정식에 의한 계수결과들을 Ref.1로 표기하여 함께 그래프에 나타내었다.

Hydrodynamic derivatives for depth & period
심도에 대한 영향을 분석해보면, 부가질량

Maneuvering derivatives of submarine model
4.3. 연직면 동안정성
제어가 없는 경우의 동적 안정성은 선형 방정식의 응답해 석을 통해 연직면의 안정성 지수가 식 (11)과 같이 Gv로 표현 되며, 동안정성은 Gv > 0 을 요구한다 (Goodman, 1979).
상기 식 (11)에서 Z와 M은 Normal force 및 Pitching moment이며, w와 q는 히브와 피치속도이다. 그리고 m′와 xG′에 대한 값은 다음 식 (12)와 같이 산정한다.
Table 4와 같이 무한심도인 심도 6.0에 대하여 동안정성 지 수를 산정해본 결과, Gv > 0 으로서 동안정성을 만족하는 것 으로 나타났다.

Vertical dynamic stability index
5. 결 론
본 논문에서는 VPMM 장비를 이용한 순수 상하동요 및 순 수 종동요 시험을 통해 수중 잠수함 모형의 부가 질량, 부가관 성 모멘트, 감쇠력 및 감쇠 모멘트 등을 계측하였으며, 이 계 측 결과로부터 잠수함 모형의 유체력 미계수를 획득하였다. 그리고 추정된 계수의 적정성은 모형시험과 이론 추정치와의 비교를 통해 검토되었다.
순수상하동요에서는 전반적으로 주기에 따른 경향이 이론 추정치와 유사한 것으로 나타났다. 즉, 부가관성모멘트와 감쇠 모멘트는 주기 및 심도에 따른 유체력 미계수 결과가 이론추 정치에 매우 근사함으로 적정한 값을 가짐을 확인하였다. 한 편, 순수종동요의 경우도 타당한 계수값을 보여주고 있으며, 주기와 심도에 따른 변화가 일정한 범위 내에서 나타나고 있 다. 또한 무한수심인 심도 6.0의 결과로부터 깊은 수심에서 주 기에 따른 변화없이 일정한 계수로 수렴함을 알 수 있으며 이 론추정치와도 근사함을 보여준다.
한편, 수중운동체의 동안정성 판별에 있어서는, 0보다 큰 양 (+)의 값을 가짐으로 연직면 운동에 대한 동안정성을 만족 하는 것으로 나타났다.
따라서 이와 같이 추정된 동유체력 계수는 유체력 모델링 및 운동 예측 시 알맞게 적용이 되어야 할 것이며, 수중운동체 시스템의 설계 및 운동조종 성능 분석 등에 유용하게 활용될 수 있을 것으로 기대된다.
후 기
본 연구는 부산대학교의 기성회 연구비 지원으로 수행된 연구결과 중 일부임을 밝히며, 연구비 지원에 감사드립니다.