해군함정 협수로 연안 항해시 함위산출 및 보고사항 개선에 관한 연구
A Study for Improving Naval Vessels’s Position Calculation and Reporting Requirements for Safe Sailing in Narrow Channels
Article information
Abstract
본 연구는 해군함정이 협수로 연안항해시 실시하고 있는 교차방위법을 살펴보았다. 특히, 물표 측정 순서에 의해 오차가 적게 발생 하는 위치산출 방법, 권고 침로 산출 방법 및 위치 산출 후 조함권자에게 보고하는 사항을 항해안전 측면에서 살펴보았다. 해군 함정의 경우 협수로 항해 시, 협수로 연안 항해 요원이 배치되어 보다 강화된 항해 안전태세를 유지하게 된다. 물론 최신 기술의 발달로 다양한 항해장비가 등장하고 있어, 별도의 함위 산출 요원이 없어도 함위를 정확히 산출할 수 있다. 그러나 해군 함정의 경우 교전 시 언제든 함정손상이 발생할 수 있다는 점, 최근 지속적인 북한의 전파 교란으로 인해 항해 장비를 운용할 수 없는 상황이 발생할 수 있다는 점, 상선과는 다르게 함교에 충분한 인원이 배치될 수 있다는 점 등 교차방위법을 사용할 필요성이 존재한다. 본 연구를 통해 해군 함정 교차방위법이 항해안전 측면에서 개선되고, 초급장교들의 Seamanship 함양에 도움이 될 수 있을 것으로 판단된다.
Trans Abstract
This research examines the use of Cross Bearing in the Republic of Korea Navy. Specifically, this study focuses on the degrees of errors caused by the order of measuring targets and suggests a new method to determine Advice Course. It then reviews the appropriateness of the contents of Location Report that is regularly to the duty officer during a voyage in a narrow channel. Whenever a naval vessel passes through a narrow channel, many number of sailors are assigned to diverse positions in order to enhance navigational safety. Even though it is possible to easily recognize the location of a ship with helps of various kinds of navigational equipments using state-of-the-art technology, there are still several situations where sailors’ efforts are indispensible for calculating the position of their ship : when the ship is damaged during an engagement with enemies and when the enemies interfere (GPS) signals. In addition, the particularity of naval vessels in which many number of crew members can be assigned to various positions supports for the suitability of the use of Cross Bearing in the Navy. This study will contribute to navigational safety of the ROK Navy and fostering junior naval officers’ seamanship.
1. 서 론
항구는 대양과 바로 맞닿은 곳에 위치한 경우도 있지만 길 고 좁은 수로를 통해 연결되기도 한다. 해군은 진해, 평택, 인 천, 목포 등 군항을 운용하고 있으며, 이러한 군항에 출입항 시 좁은 수로를 이동하게 된다. 협수로 항해는 대양에서의 항 해와는 크게 다르다. 수로 자체가 좁고 길기 때문에 선박의 행동이 제한되며, 출입항·통항·투묘 선박 등 다수의 선박이 밀집되어 있다. 또한 육지와 근접해 있어 수심이 상대적으로 낮고, 암초, 침선 등 위험물이 산재해 있다. 해군에서는 협수 로 연안항해가 항해 안전에 위협이 됨을 인지하여 별도의 함 위 산출요원을 배치하고, 함정의 위치를 정확히 산출하고자 하는 노력을 하고 있다. 함정의 위치를 산출하는 방법은 다양 하지만 해군에서는 교차방위법을 사용하고 있다.
본 연구는 해군 창설이후 오랜 기간 사용해온 교차방위법 을 살펴보고, 함정위치 산출시 물표를 측정하는 순서에 따라 발생하는 오차를 정량적으로 분석하였으며, 함위 산출 후 조 함권자에게 보고하는 기존 권고침로의 제한점을 확인하고 모 든 상황에 적용 가능한 권고침로 산출방법을 제시하였다. 또 한 항해 안전 우선순위를 고려한 간략보고 방법을 제시하였 다. 이상의 연구결과는 해군 함정의 협수로 연안 항해 시 항 해안전에 기여할 것으로 판단되며, 초급장교들이 어려워하는 권고 침로 산출방법을 쉽고 정확하게 제시함으로써 자신감을 갖고 적극적인 권고를 할 수 있을 것으로 기대된다.
2. 해군 함정의 협수로 연안항해
2.1. 교차방위법
교차방위법은 가장 일반적이고 대표적인 함위 결정법으로 Fig.1에서와 같이 연안항해시 해도에 기재되어 있는 2개 이 상의 물표의 방위를 측정하여 이를 해도 상에 교차시켜 위치 선을 통해 함위를 결정하는 방법이다(Combat School, 2014). 교차방위법은 위치를 산출하는 시간이 빠르고, 방법이 간단 하여 해군에서 연안항해시 위치를 산출할 때 사용하고 있다.

The concept of cross bearing
2.2. 함정 협수로 연안항해시 교차방위법 필요성
협수로(Narrow Channel)란 좁은 수로란 뜻으로써 세심한 주의를 하지 않을 시 좌초나 충돌의 위험에 직면하게 되는 수로를 말한다. 협수로 연안항해시는 수로의 폭이 좁고 조류 가 강하며 암초와 같은 위험물이 존재하고 많은 선박이 항해 하므로 사전에 철저한 준비가 필요하다(Combat School, 2014). 일반 상선의 경우에는 선교 당직자가 항해사와 조타수 등 2~3명 수준을 유지하고 있으며, 주로 레이더와 GPS 등 항 해 장비를 이용하여 항해를 한다. 반면, 해군 함정의 경우에 는 협수로를 지나기 위해서 함장을 비롯한 다수의 항해 요원 들이 별도로 배치되며, 충분한 인원을 바탕으로 체계적으로 교차방위법을 집행할 수 있다. 또한 첨단 항해장비가 있음에 도 불구하고 적에 의한 GPS 교란이 작전해역에서 지속적으 로 발생하고 있는 상황(Kim, 2013)과 전시 적의 주 공격목표 가 된다는 군함의 특수성에 의해 기존의 항해 장비를 이용하 지 못하는 상황이 발생할 가능성이 높다. 결과적으로 해군에 서는 충분한 인원이 운용가능하다는 점과 특수성으로 물표를 이용한 교차방위법이 반드시 필요하다.
2.3. 해군함정과 상선의 교차방위법 차이
해군함정과 상선 모두 협수로 이동 시 교차방위법을 이용 하여 자신의 위치를 산출한다. 해군함정과 상선이 교차방위 법을 사용하고 있으나, 몇 가지 차이를 가진다. 첫째, 해군함 정의 경우 충분한 인원이 Team을 구성하여, 방위를 측정하 는 인원, 중재자 역할을 하는 인원, 위치를 기점하고 관련 사 항을 보고하는 인원이 교차방위법을 실시한다. 반면에 상선 의 경우, 항해사 단독으로 선위를 참고하기 위한 목적으로 실 시한다. 둘째, 해군함정의 경우 충분한 인원을 바탕으로 정확 한 위치를 산출하기 위해 교차방위법을 물표측정 1분 전부터 단계적으로 집행한다. 즉, 물표 측정 1분전에 물표 측정수가 3개의 물표를 선정하게 되고, 30초 전에 1물표 예정방위를, 15초 전에 준비, 해당시각에 집행을 하게 된다. 반면에 상선 의 경우 항해사가 필요한 시기에 물표를 순차적으로 확인하 여 위치를 산출한다. 셋째, 해군함정의 경우 항해안전을 보좌 하기 위해 위치산출 후 10여 가지의 보고사항을 정리하여 조 함권자에게 보고한다. 반면, 상선의 경우 조함을 하는 항해사 가 직접위치를 기점하고 이를 항해 시 참고한다. 넷째, 해군 함정의 경우에는 물표를 측정할 시 정횡 ⇒ 선수 ⇒ 선미 순 으로 측정을 하지만, 상선의 경우에는 선수 ⇒ 선미 ⇒ 정횡 순으로 물표를 측정한다. 다섯째, 해군함정의 경우 군함의 특 성상 항해장비의 손상 가능성과 지속적인 북한의 전파교란 등으로 항해 장비를 제대로 운용하지 못할 가능성이 높게 된 다. 반면, 상선의 경우에는 상대적으로 그러한 가능성이 적 다. 이렇듯 해군함정과 상선이 교차방위법을 사용하여 위치 를 산출하는 것은 동일하지만, 물표를 측정하는 순서를 비롯 하여 많은 부분에서 차이가 존재한다.
2.4. 기점수 보고사항과 권고 침로
위치 기점수는 위치기점을 완료하면 10가지 사항을 조함권 자(함장 또는 당직사관)에게 보고하며, 항해안전을 위한 지휘 결심을 보좌한다. 위치 기점수가 보고하는 10가지 내용은 Table 1과 같다.

Information reporting to duty officer
다음의 보고사항 중 3번 항목인 권고 침로는 해도 상 결 정된 함위를 바탕으로 당직사관이 안전한 침로를 잡을 수 있 도록 정보를 제공한다. 권고 침로는 1차 및 2차 권고 침로로 구분된다. 1차 권고 침로는 최초 항해계획을 세울 때 작도한 기본 침로선상에 진입하기 위한 침로이며, 2차 권고 침로는 기본 침로를 벗어나지 않기 위한 침로로써 더 이상 기본 침 로선상에서 벗어나지 않기 위한 침로이다. 이러한 권고 침로 는 협수로 주변에 많은 항해상 위험물들이 존재한다는 것을 고려할 때 중요한 의미를 가진다. 따라서 해군에서도 권고 침 로 산출방법을 교육 자료 등을 통해 제공하고 있으며, 이를 사관학교 교육과정 및 임관 후 초등군사반 교육과정에 교육 하고 있다. Fig.2는 현재 초등군사반 교육과정에서 침로를 산 출하는 방법을 나타낸 것이다.
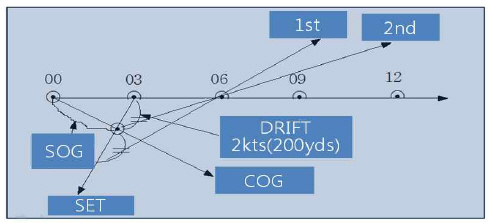
The advice course on elementary military training materials
해군에서는 최근 산출된 실측위치를 기준으로 2가지의 침 로를 권고한다. 첫째, 1차 권고 침로이다. 1차 권고 침로는 기 본침로 상에 위치하기 위한 침로이며 유향 쪽으로 유속의 2 배 연장한 지점에서 다음 추측위치를 보는 방향이 된다 (Combat School, 2014). 쉽게 말해 1차 권고 침로는 안전항로 라고 할 수 있는 침로선상으로 복귀하도록 권고하는 침로이 다. 둘째, 2차 권고 침로이다. 2차 권고 침로는 1차 권고 침로 를 보고한 후 보고하게 되며, 기본침로를 계속 유지하기 위한 침로이다. 이는 최근 실측위치에서 다음 추측위치를 보는 방 향이 된다(Combat School, 2014). 즉, 현재 침로선을 벗어난 거리를 유지하는 침로라고 할 수 있다. 이러한 2차 권고 침로 는 침로선상에서 크게 벗어나지 않고 기본 침로선과 평행하 게 기동하기 위한 침로의 의미를 가지고 있으면서, 조함권자 에게 더 이상 침로선상에서 멀어지지 않기 위한 최소한의 침 로를 권고하는 의미도 가지고 있다. 이와 같은 1차, 2차 권고 침로는 협수로를 이동하는 해군 함정의 안전에 중요한 의미 를 가진다.
3. 해군 함정 교차방위법 연구 중점
3.1. 물표 측정 순서
교차방위법은 주변에 있는 2개 이상의 물표를 이용하여 위 치선을 그어서 위치를 산출하게 된다. 따라서 주변에 있는 물 표를 선정하여 순차적으로 방위를 측정하게 된다.
해군에서는 방위변화가 큰 정횡 물표를 가장 먼저 측정하 고 이 후 선수, 선미 물표 순으로 측정을 하게 된다. 정횡 물 표를 가장 먼저 측정을 하는 것은 위치를 산출하는 시점이 과거의 고정된 시점이기 때문이다. 즉, 위치를 산출한 위치기 점수가 “00분 위치보고”라는 보고와 함께 과거의 특정 시점 에서의 위치를 보고하기 때문이다. 반면, 상선의 경우에는 현 재의 위치에서 가장 오차가 적은 위치를 산출하기 위해 방위 변화가 가장 큰 정횡 물표를 가장 나중에 측정하게 되는 것이다.
항해 안전이 더욱 중요시되는 현 시점에서 선위로 결정이 된 위치의 정확도는 대단히 중요하다. 따라서 물표 측정 순서 에 따라 함위 정확도가 어느 정도 차이가 나고 이를 개선하 기 위한 방법은 없는지 살펴보는 것이 필요하다. 본 연구에서 는 물표의 측정 순서가 결과적으로 함위 정확도에 어느 정도 영향을 주는지 계산 프로그램인 Matlab 2013a을 이용하여 정 량적으로 산출해 보았다.
3.2. 권고 침로 산출 방법
초급 장교들이 함정에 부임하여 여러 가지 임무를 수행하 고 있지만, 함정의 출입항시에 가장 우선시되는 임무가 바로 협수로 연안항해시 함위를 산출하는 것이다. 함위를 산출하 고 조함권자에게 신속 정확하게 보고하는 것이 핵심이라고 할 수 있다. 많은 수의 초급 장교들은 위치를 산출한 후 권고 침로를 산출하는 부분에 애로사항을 가지고 있다. 이는 기존 의 교육교재에 나와 있는 방법을 사용할 시 모든 상황에 적 용이 가능하지 않기 때문이다. 따라서 본 연구에서는 모든 상 황에 적용이 가능한 방법을 연구하여 제시하고자 한다.
3.3. 기점수 보고사항
위치를 산출 한 후 위치 기점수는 최근의 추측위치와 두 실측위치를 바탕으로 항해상 필요한 여러 사항을 정리하여 조함권자에게 보고한다. 위치 산출시간부터 해도상 장애물 유무까지 총 10가지 보고사항을 조함권자에게 보고하게 되는 데, 이러한 많은 정보는 조함권자의 결심에 방해요소로 작용 할 수 있다. 즉, 다수의 보고사항에 따른 장시간의 보고시간 은 보다 중요한 타 정보의 개입을 막을 뿐만 아니라 긴박한 상황에서 항해안전과 관련되지 않은 보고사항도 포함이 되어 있어 문제가 될 수 있다. 또한 조함권자는 보고를 모두 받는 시점에서의 위치와 장시간의 보고로 인해 산출했던 과거 시 점의 실제 위치에서 오차가 더욱 크게 발생하는 측면이 존재 한다. 따라서 본 연구에서는 기점수의 보고사항을 항해안전 측면에서 우선시되는 것을 식별하고 간략하게 보고하는 방법 을 제시하였으며, 간략하게 보고함으로써 얻게 되는 위치오 차의 개선정도를 정량적인 방법을 통해 산출해 보았다.
4. 해군 함정 교차방위법 개선 방안
4.1. 물표측정 순서에 따른 오차 및 개선방안
앞서 언급하였듯이 해군함정과 상선은 물표를 측정하는 순 서가 다르다. 함정은 방위변화가 큰 물표를 가장 먼저 측정하 고 있으며, 상선의 경우에는 가장 늦게 측정한다. 본 절에서 는 물표의 위치선(LOP : Line Of Position) 방정식을 통해 물 표측정 순서에 따른 위치오차를 확인하였다. 위치선 방정식 을 통해 함위 정확도를 산출하기 전에 다음과 같이 가정하였 다. 첫째, 함정은 외력의 영향을 받지 않는다. 둘째, 함정에서 선정한 물표는 정횡, 선수, 선미에 위치하며, 함정으로부터 2,000yds에 위치해 있고, 각 물표 간 협각은 60도이다. 셋째, 물표 측정 시 측정시간 간격은 3초이며, 물표 측정 시 지연시 간은 없다. 넷째, 함정은 X축 선상으로 똑바로 진행한다.
앞선 가정을 바탕으로 위치선의 방정식을 식 (1)~(3)과 같 이 식으로 표현하였으며, 위치보고가 완료된 시점(1물표 방 위 측정 시작 이후 대략 60초 시점)에서의 위치오차를 산출 하였다. x와 y로 표현한 방정식은 기준좌표인 (0,0)을 기준으 로 각각의 위치선 방정식을 의미하며, 방정식을 통해 위치선 의 교점을 구하고, 결과적으로 X축으로 선박이 일정시간 지 난 후의 위치오차를 산출하기 위함이다. Fig. 3

LOP equation by target selected order (stern→abeam→forward)
위 식에서 확인할 수 있듯이 시간지연에 따른 방위선 오차 는 θ1과 θ2이다. θ1은 함정속력에 의해 2L만큼 이동한 함 정에서 3물표를 바라보게 됨으로써 발생하는 오차를 나타내 며,θ2는 함정속력에 의해 L만큼 이동한 함정에서 2물표를 바라보게 됨으로써 발생하는 오차를 의미한다. θ1과 θ2는 물표까지의 거리 R과 시간지연에 따른 이동거리 L로 표현이 가능하다. 즉, θ2의 경우
의 경우
앞선 계산식을 바탕으로 물표측정 순서에 따라 보고사항 을 종료하는 1물표 측정 후 1분이 되는 시점에서의 위치 오 차정도를 측정한 결과 Table 2와 같이 나타났다. 이는 물표 측정방법에 의해 발생하는 오차삼각형의 내심을 기준으로 물 표측정 순서에 따른 오차의 정도를 측정한 것이다.

The position error according to the selection procedure (Unit : yds)
결과적으로 선수 → 선미 → 정횡과 선미 → 선수 → 정횡 순서로 측정하는 것, 즉 방위변화율이 가장 큰 물표를 가장 나중에 측정하는 것이 오차를 최소로 할 수 있다는 것을 확 인하였다. 가장 적은 오차를 보이는 ⑤ 와 ⑥ 의 결과 중 하나 를 선택하는 문제는 Fig.4와 같이 선수 물표를 우선 측정할 시 함위가 물표 쪽으로 편위되는 것을 통해 판단하였다.

The deviation error base on the base course according to method of target selection
즉, 함위를 산출하기 위해 도움이 되는 물표는 보통 근거리 물표를 선택하게 되며, 이러한 근거리 물표는 함정입장에서 는 위험물로 인식할 수 있다. 따라서 함위가 물표 쪽으로 편 위되어 기점을 하는 것이 함 안전상 더욱 경계를 하면서 조 함하게 되는 효과를 가져오기 때문에 바람직할 것이다. 따라 서 물표 측정은 ⑤ 의 방법인 선수 → 선미 → 정횡 순으로 측정하는 것이 바람직하다고 할 수 있다. 그동안 물표의 측정 을 시작한 시점에 초점을 맞추어 그 당시 위치오차가 가장 적은 방법을 사용하여 정횡물표를 가장 먼저 측정하였는데, 현재의 위치에서 가장 오차가 적은 방법으로 개선이 될 수 있다면 보다 항해안전에 기여할 수 있을 것으로 판단된다.
4.2. 모든 상황에 적용 가능한 권고 침로 산출방법
교육사에서 초급장교들을 대상으로 교육을 하는 ⌈함정초 군반 통합교재⌋“협수로 연안항해”를 살펴보면 함위 산출 후 침로를 권고하는 방법이 간략히 명시되어 있다. 즉, 1차의 경 우 기본침로 상에 위치하기 위한 침로이며 유향 쪽으로 유속 을 2배 연장한 지점에서 다음 추측위치를 보는 방향으로 명 시를 하고 있다. 또한 2차 권고 침로의 경우에는 기본침로를 계속 유지하기 위한 침로이며 현 실측위치에서 다음 추측위 치를 보는 방향으로 명시하고 Fig.2을 제시하였다. 그러나 Fig.2의 경우는 매우 이상적인 경우로 이전의 실측위치가 침 로선상에 있는 경우에 가능하다 할 수 있다. 즉, 바로 전의 실측위치와 그 때의 추측위치, 현재의 실측위치가 서로 다른 위치에 있을 경우 Fig.5와 같이 그대로 적용이 안 되는 경우 가 존재한다는 것이다. Fig.5의 경우 2차 권고 침로는 현 침 로를 유지하는 목적이 있지만, 실제 기존방법을 이용하여 현 재의 실측위치에서 기본침로 선으로 선을 그어서 만나는 점 으로 기동할 시 침로선에서 벗어나는 방향으로 기동하게 된 다. 따라서 기존방법을 보완할 수 있는 모든 상황에 적용 가 능한 방법을 제시하였다.

The wrong case on calculating by origin method
Fig.6의 경우 모든 상황에 적용 가능한 방법으로 앞선 경 우와 같은 상황에서도 권고 침로의 목적에 맞는 권고가 가능 하다. 새로운 방법의 경우 현재의 위치에서 기본침로선(A선) 과 평행한 B선만 그어주면 쉽게 침로권고가 가능하다. 즉, 유 향유속 방향으로 1배 만큼 기점 한 위치(P point)에서 함정 속력성분 만큼 A선에 그은 방향은 1차 권고 침로, B선에 그 은 방향은 2차 권고 침로가 되는 것이다.

The new method to calculate ship’s heading
Fig.7은 앞선 권고 침로 산출방안을 통해 기존 방법으로는 해결되지 않은 상황에서도 정확히 침로를 권고하는 것을 보 여준다.
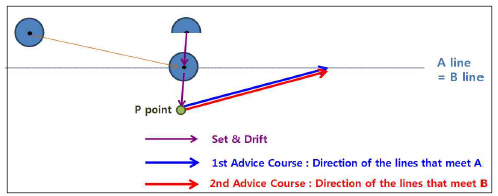
The case on solving the origin problem in a new method
Fig.7을 통해 A line(기본침로선)과 B line(현재의 실측위 치에서 기본침로선과 평행한 선)이 동일한 선이 되는 것을 확인할 수 있으며 그에 따라 1/2차 권고 침로는 동일한 침로가 되어 바람직한 침로를 권고할 있다는 것을 확인할 수 있다. 즉, 다음과 같은 상황에서는 1차(기본침로선과 평행 한 침로) 및 2차(기본침로선에 복귀하는 침로) 권고 침로가 동일하게 나올 수 있는 것이다.
이러한 새로운 권고 침로 산출방법은 초급 장교들이 가장 어려워하는 보고사항을 보다 쉽게 산출할 수 있도록 함으로 써 초급장교들의 자신감 향상은 물론 항해안전에도 도움이 될 것으로 기대된다.
4.3. 항해 안전 중요도를 고려한 기점수 간략 보고방안
위치 기점수는 위치기점을 완료한 후 조함권자에게 10가지 의 보고사항을 보고하게 된다. 10가지의 보고사항은 Table 1 과 같다. 협수로에서 항해를 하는 상황을 가정해보면 다수의 표적들로 인해 위험에 노출되어 있을 뿐 아니라 다수의 정보 사항을 종합하여 조함권자가 명확하게 침로를 지시하게 된 다. 이러한 긴박한 상황에서 항해안전과 크게 관련이 없는 다 수의 보고사항은 긴요한 타 정보사항의 개입을 막고 조함권 자에게 혼란만 가중시킬 수 있다. 따라서 항해안전과 관련된 중요사항을 정리하고 이를 간략히 보고하는 방법이 필요하 다. Table 3은 기존 보고사항 중 항해안전 중요도를 고려하 여 식별한 내용을 정리한 것이다.

Judgement navigational safety on information reporting to duty officer
이를 통해 다수의 표적이 산재하고 있는 긴급한 상황에서 는 항해안전에 필수적인 내용만을 보고하여 시간을 단축시키 고 조함권자가 중요사항을 조기에 식별할 수 있는 보고방법 이 필요하다. 그 예로“함교 위치보고, 침로선 오른편 150, 1차 권고 침로 097도, 2차 권고 침로 110도, 해도상 수심 12m, 기 타 해도상 장애물 없음”정도로 간략하게 보고하는 것이다. 이런 방법으로 Table 1의 기존 방법에 비해 보고시간을 약 15초 이상 시간 단축 효과가 있다. 이러한 간략한 보고 방법 은 조함권자에게 중요한 내용을 신속히 전달하는 효과와 함 께 시간 단축에 따라 물표 방위를 통해 산출된 위치와 보고 완료시 함정의 위치의 오차를 단축되는 효과가 있다.
4.1에서 물표측정 순서에 따른 함위의 정확도를 산출한 방 법과 동일하게 Matlab 2013a를 이용하여 15초의 시간 단축효 과에 대해 오차의 개선 정도를 확인해보면 Table 5 와 같다. 즉, 간략한 보고 방법을 필요한 시기에 적용할 경우 조함권자 에게 함 안전관련 중요사항을 우선시 보고하여 결심을 도와 줌과 동시에 보고 완료당시 보고시간이 15초 정도 단축되는 효과를 통해 함위의 정확도도 향상이 되는 것을 확인할 수 있다. Table 4

Comparison to origin methods and new ways to trap the position error (Unit : yds)
5. 결 론
본 연구에서는 함정에 근무하게 되는 초급장교들이 임관 후 마주치게 되는 협수로 연안항해시 교차 방위법을 살펴보 았으며, 물표 측정 순서에 따라 보고자가 보고를 완료한 시점 에서 오차가 적게 발생하는 방법을 정량적으로 산출해보고, 어느 상황에서도 정확한 침로를 권고할 수 있는 방법 그리고 지휘결심을 보좌하고 함위 오차를 줄이는 간략 보고 방법을 제시하였다. 본 연구에서 얻은 결과를 바탕으로 정리한 내용 은 다음과 같다.
첫째, 물표측정 순서에 따른 위치 정확성을 정략적으로 확 인한 결과, 정횡물표를 가장 나중에 측정하는 방법이 보고자 가 보고를 완료한 시점(물표 측정 집행 후 약 1분 후)을 기준 으로 함위 오차가 가장 적게 산출되었으며, 선수→선미→정 횡 순서로 물표를 측정할 경우 함위가 물표 쪽으로 편위하게 되어 보다 경각심을 가지고 항해를 할 수 있기 때문에 물표 를 측정하는 순서는 선수→선미→정횡으로 하는 것이 바람직 하다는 것을 확인하였다.
둘째, 권고 침로를 산출하는 표준 방법을 제시하였다. 표준 방법은 DRP(추측위치)를 바탕으로 유향유속을 확인하고 실 측위치에서 유향유속 방향으로 1배 만큼 위치한 위치(P점)을 기점한 후, 실측위치에서 기본 침로선(A선)과 평행한 선(B 선)을 작도한다. 마지막으로 P점에서 현재의 함정 속력고려 컴퍼스를 이용하여 B선과 만나는 점의 방향을 2차 권고 침 로, A선과 만나는 점의 방향을 1차 권고 침로로 보고하는 것 이다.
셋째, 함정 상황을 고려하여 적절한 보고안을 제시하였다. 신속히 함정의 위치를 산출해야 하는 긴박한 상황에서 함정 은 보다 간편한 보고법을 통해 항해 안전과 함위 정확도를 높일 수 있음을 확인하였다.
본 연구에서 제시하고 있는 내용은 Matlab 2013a의 컴퓨터 용 프로그램 언어를 활용하여 오차를 계산함으로써 함위 정 확도를 판단하였다. 이러한 방법을 통해 단순히 그럴 것이라 고 예측되는 내용을 정량적으로 분석하였다.
그러나 연구 과정에서 정량적인 분석을 위해 물표를 일정 한 곳에 위치시키고, 함정은 변침변속이 없는 상황을 가정했 다는 점, Table 3의 내용에서 언급한 항해안전 중요도는 상 황에 따라 달라질 수 있다는 점 등 제한점이 존재하며, 이는 추후 보다 사실적이고 다양한 상황을 고려한 연구를 통해 보 완되어야 할 것이다.
Notes
㈜ 이 논문은 “해군함정 협수로 연안항해시 함위산출 및 기점수 권고사항 개선에 관한 연구”란 제목으로 2015년 한국항해항만학회 추 계학술대회논문집(한국해양대학교, 2015. 7. 9. pp. 24-27)에 발표되었음.