자율운항선박 도입에 따른 선박교통관제 업무 변화에 관한 연구
Study on Changes in Vessel Traffic Services Due to Introduction of Maritime Autonomous Surface Ships
Article information
Abstract
자율운항선박 관련 기술개발은 2010년도 중반부터 충돌회피, 항로 지정, 디지털 트윈 및 통신 기술개발 등의 주제로 활발하게 진행되고 있다. 그러나, 이와 비교하여 자율운항선박과 연계된 물류시스템, 항만시설 및 선박교통관제 등의 육상 인프라에 관한 연구는 상대적으로 관심을 받지 못하고 있다. 이 연구에서는 자율운항선박의 등장에 따라 기존 선박교통관제 업무에 미치게 되는 영향을 분석함과 동시에 이를 대비하기 위한 관제 업무 변화 방안을 제시하였다. 이를 위하여 현행 선박교통관제 업무를 분석하고, 동시에 자율운항선박 기술 중 선박교통관제에 영향을 미칠 수 있는 요소를 파악하였다. 또한, 선박교통관제사들을 대상으로 자율운항선박 관제 관련 항목 도출을 위한 설문조사를 수행하였으며, 이를 AHP 기법으로 분석한 결과 비상 상황 대응 및 자율운항선박과의 통신 방법에 대한 준비가 가장 중요한 것으로 도출되었다. 이를 기반으로 해상교통관제구역 내에서 데이터 통신을 기반으로 한 기본적인 자율운항선박 관제 절차 및 비상 대응 절차 등 세부 방안을 도출할 수 있었다. 이 연구에서 제안하는 자율운항선박 관제 절차는 향후 자율운항선박의 연안 해상교통안전에 관한 문제점들을 해소하는 방안으로 활용될 수 있을 것으로 기대된다.
Trans Abstract
Study on Changes in Vessel Traffic Services Due to Introduction of Maritime Autonomous Surface ShipsThe development of technologies related to Maritime Autonomous Surface Ships (MASS) has been actively progressing since the mid-2010s, focusing on themes such as collision avoidance, route planning, digital twin, and communication technologies. On the other hand, research on land-based infrastructure connected with MASS, such as logistics systems, port facilities, and vessel traffic services, has relatively received less attention. This study analyzed impact of emergence of MASS on existing vessel traffic service operations and proposed changes in control operations to prepare for its impact. To do this, current vessel traffic service operations were analyzed and elements of MASS technology that could affect vessel traffic control were identified. A survey was conducted among vessel traffic controllers to identify items related to the control of MASS. Results analyzed using the AHP method showed that preparation for emergency response and communication methods with MASS were the most important. Based on this, we were able to derive detailed plans for basic MASS control procedures and emergency response procedures based on data communication within maritime traffic control areas. MASS control procedures proposed in this study are expected to be used as a solution to resolve issues related to traffic safety of MASS in coastal areas.
1. 서 론
최근 환경 및 안전에 관한 관심의 증가와 함께 이를 해결하기 위한 하나의 해결책으로서 자율운항선박에 관한 관심이 증가하고 있으며, 이를 위하여 다양한 연구들이 수행되고 있다. 자율운항선박 개발을 위한 연구는 주로 충돌회피, 항로 지정, 디지털 트윈 및 통신 기술개발에 관한 주제를 중심으로 진행되고 있으며, 이를 위하여 우리나라에서도 2020년부터 자율운항선박 기술개발이라는 주제로 대형 국가연구개발사업을 진행하고 있다.
그러나, 자율운항선박과 연계된 항만물류시스템, 항만시설 및 선박교통관제 등의 기존 육상 인프라에 관한 관심과 연구는 상대적으로 제한적인 실정이다. 이는 자율운항선박이 실제로 운용되더라도 주변 인프라의 한계로 인해 그 기능을 완전히 발휘하지 못하는 장애 요소가 될 수 있다. 또한, 선박교통 관제의 관점에서는 기존 유인 선박 및 자율운항선박 간의 관계, 비관제 대상 선박인 어선 및 레저 선박과의 의사소통 및 정보교환에 관한 연구가 필수적이다.
따라서 본 연구에서는 이러한 자율운항선박의 출현에 따른 선박교통관제 업무의 변화 방향을 기존 업무 및 신기술 관점에서 파악하고, 이를 해결하기 위한 추가 업무에 대한 우선순위 도출 및 자율운항선박 관제 및 비상 상황 대응 절차를 제시하고자 한다.
2. 해상교통안전 측면 자율운항선박 기술 동향
자율운항선박과 관련한 기본 개념 및 연구개발 현황은 다양한 논문들을 통해서 소개된 바 있으므로, 본 연구에서는 이중 해상교통안전과 연관된 자율운항선박 기술개발 추진 현황에 대하여 살펴보고자 한다.
2.1 자율운항선박 육상원격제어
IMO에서는 자율운항선박의 자율 수준(Degree of Autonomy)을 Table 1과 같이 4가지 등급으로 구분하고 있으며, 해상교통안전 관점에서의 자율운항선박은 장애물 인식, 충돌회피, 경로 생성 등의 기능을 가지고 있는 선박으로 볼 수 있다.
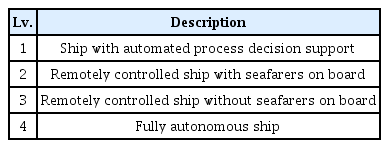
Degree of Autonomy for the MASS
이와 함께 자율운항선박 육상원격제어센터(Shore Remote Control Center, SRCC)는 다수의 자율운항선박을 원격으로 모니터링하고, 필요시 특정 자율운항선박의 운항에 개입하여 조작하는 기능을 가지고 있다(Gong et al., 2022). 육상원격제어센터의 기능은 아직 공식적으로 완전히 정의되지는 않았지만, 국내에서 ‘자율운항선박 기술개발’ 및 ‘스마트항만-자율운항선박 연계 기술개발’의 세부 항목으로 수행 중이다. 이를 위한 주요 기능으로는 다수의 선박 모니터링, 원격 개입을 위한 상황 인식 정보 제공 및 유사시 직접 조종이 가능한 수단 제공 등이 있다.
육상원격제어센터와 외부 시설과의 연결 개념도는 Fig. 2와 같이 MUNIN Project에서 최초로 고안되었다(MacKinnon et al., 2015). 여기에서 육상원격제어센터는 자율운항선박 및 육상 지원시설 등과 음성 및 데이터 통신을 기반으로 통신할 수 있는 기능이 마련되어야 한다.

Concept and external interface of SRCC (Source: MacKinnon et al., 2015)

Conceptual diagram of the role of VTS according to the emergence of MASS (Source: IALA, 2021)
육상원격제어센터에서 자율운항선박의 운항에 개입할 수 있는 조건은 ESRC(Emergency Situation for Remote Control)로서 정의가 되어 있으며 주요 조건은 다음과 같다(Jeong and Yim, 2020; Yim, 2021).
1) 선박 충돌: 충돌회피가 불가한 상황
2) 충돌 위험: 충돌회피 대응을 필요로 하는 상황
3) 항로 이탈: 자율운항선박의 항로 이탈
4) 선주 요청: 선주의 요청에 의한 개입
5) 선대 제어: 선대 전체에 대한 동시 제어 필요시
2.2 자율운항선박 안전 운항 지원
자율운항선박 안전 운항 지원 서비스는 자율운항선박의 안전성과 효율성 향상을 목적으로 육상에서 지원하는 부가적인 서비스이다(Kwon et al., 2021). 국내에서는 자율운항지원, 접이안 및 계류지원, 화물 적양하 및 선박 입출항 지원, PSC 점검 지원, 상태모니터링 지원 및 사고 대응 지원의 총 6가지의 서비스 개발을 목표로 연구를 수행하고 있으며, 항목별 주요 내용은 다음과 같다.
1) 자율운항지원: 주변 선박 및 항로 정보교환과 환경 정보 수집을 통한 위험도 기반 항로 분석
2) 사고 대응 지원: 해양사고 발생 시 신속한 대응 지원을 위한 정보 전파 및 의사결정 지원 매뉴얼 제공
3) 접안 및 계류지원: 인공지능 및 센서 융합을 이용한 접안정보 제공 및 계류 상황 지원
4) 화물 적양하 및 선박입출항 지원: 화물 적양하 작업 및 입출항 작업을 위한 지원 시스템 제공
5) 상태모니터링 지원: 선박 기기의 상태 기반 모니터링(CBM) 및 선박예방정비(PMS)정보를 통합한 최적 모니 터링
6) PSC 점검 지원: 항만국 검사 시 해당 선박에 대한 결함 등의 국제 협약 기반 제공
3. 자율운항선박 대응 선박교통관제 업무요소 도출
3.1 선박교통관제 업무 개요
선박교통관제(Vessel Traffic Service, VTS)란, 선박의 위치를 탐지하고 통신할 수 있는 장비를 사용하여 해양환경 보호 및 선박교통의 안전과 효율성을 높이기 위한 서비스를 의미한다. (KCG, 2023). VTS의 주요 업무는 항로 이탈, 위험구역 접근, 선박 충돌 등의 위험을 감지하고 해양사고 예방을 위한 정보 및 조언의 제공에 있으며, 항만 운영 효율 향상을 위한 입출항 우선순위 조정, 항만 운영 정보 제공, 항행 안전 정보 제공 등의 역할을 수행함과 동시에 해양사고 및 비상 상황 발생 시 초동조치 및 정보 전파를 담당한다.
IALA(2022)는 VTS 운영과 관련된 IALA 권고, 지침 등을 기반으로 한 model course를 개발하였으며, 여기에서는 VTS 운영 업무를 다음과 같이 7개의 항목으로 구분하고 있다.
1) 통신, 조정 및 상호작용(Communication coordination and interaction): VTS 운영에서의 통신 원칙, 표준 구문 사용
2) 법률 체계(Legal framework): VTS 관련 책임 및 의무
3) VTS 서비스 제공(Provision of VTS): VTS의 목적과 관련 이론 및 수행 내용
4) 항해 지식(Nautical knowledge): VTS 운영자가 필요로 하는 항해 지식 요소
5) 장비(Equipment): VTS 운영에 사용되는 장비
6) 인적 요소(Human factors): 비상 상황 및 스트레스 상황에서의 VTS 운영자 업무 수행
7) 비상 상황(Emergency situation): VTS 영역 내에서 발생할 수 있는 비상 상황 대응
3.2 국제항로표지협회 자율운항선박 관제 대응 방안
국제항로표지협회(IALA)에서 VTS 위원회는 VTS 운영, 훈련 및 인증, 디지털 통신, 정보 관리 및 항로표지 서비스 등의 다섯 가지 IALA 표준에 따라 조직되어 있다. 2021년 3월 제50차 회의에서 VTS 관점에서의 자율운항선박에 대한 의미 및 향후 대응 지침이 아래와 같이 최초로 논의되었으며, 이를 위한 작업반이 구성되었다(AMSA, .
1) VTS 지역 내 MASS와 기존 선박과의 상호작용
2) MASS, 기존 선박, VTS 간의 데이터 및 정보교환
3) 항해의 안전과 효율성, 환경 보호에 기여하는 VTS 역할
Fig. 2는 해당 회의에서 채택된 자율운항선박 출현에 따른 VTS와의 관계 개념도를 나타낸다. 여기에서 다양한 자율 수준의 자율운항선박 혼재 및 자율운항선박과 유인 선박 간의 해상교통관리 등의 대응 방안 마련이 필요한 것을 확인할 수 있으며, 이를 위하여 다음과 같은 네 가지의 항목으로 구분하였다.
1) 보고 사항: 선박 정보 및 의도 전달 목적
2) 상호작용 및 정보교환: 선박 간, 선박과 육상 간, 자율운항선박과 SRCC 간, VTS와 SRCC 간 등
3) 선박교통관리: 정보 제공, 경고, 조언, 지시
4) 비상 상황 대응: 본선 혹은 상대선과 관련된 위험에 대한 사전 경고 및 제삼자로부터의 사고에 대한 상황 전파
이와 함께, IALA에서는 VTS의 디지털 정보교환과 관련한 새로운 표준(S-212)을 개발하고 있다. S-212는 IALA 가이드라인 1089와 IMO 결의서 A.857(20)에 따라 개발되었으며, IHO S-100 프레임워크 사양과 ISO 19100 시리즈 표준을 기반으로 한다. 이는 VTS 서비스의 디지털 데이터 교환을 위한 상세 사양을 제공하여 VTS 운영자 및 선박 간의 정보교환을 용이하게 하기 위한 목적이 있다. 주요 내용으로는 항해 상황, 항해 경고, 기상 정보, 전자 항해 보조 장치 등에 대한 데이터 교환 방법 및 형식을 포함하고 있으며, 이를 위한 표준 전송 방법 및 프로토콜을 명시하고 있다. Fig. 3은 S-212에 대한 기본 개념도를 나타낸다.
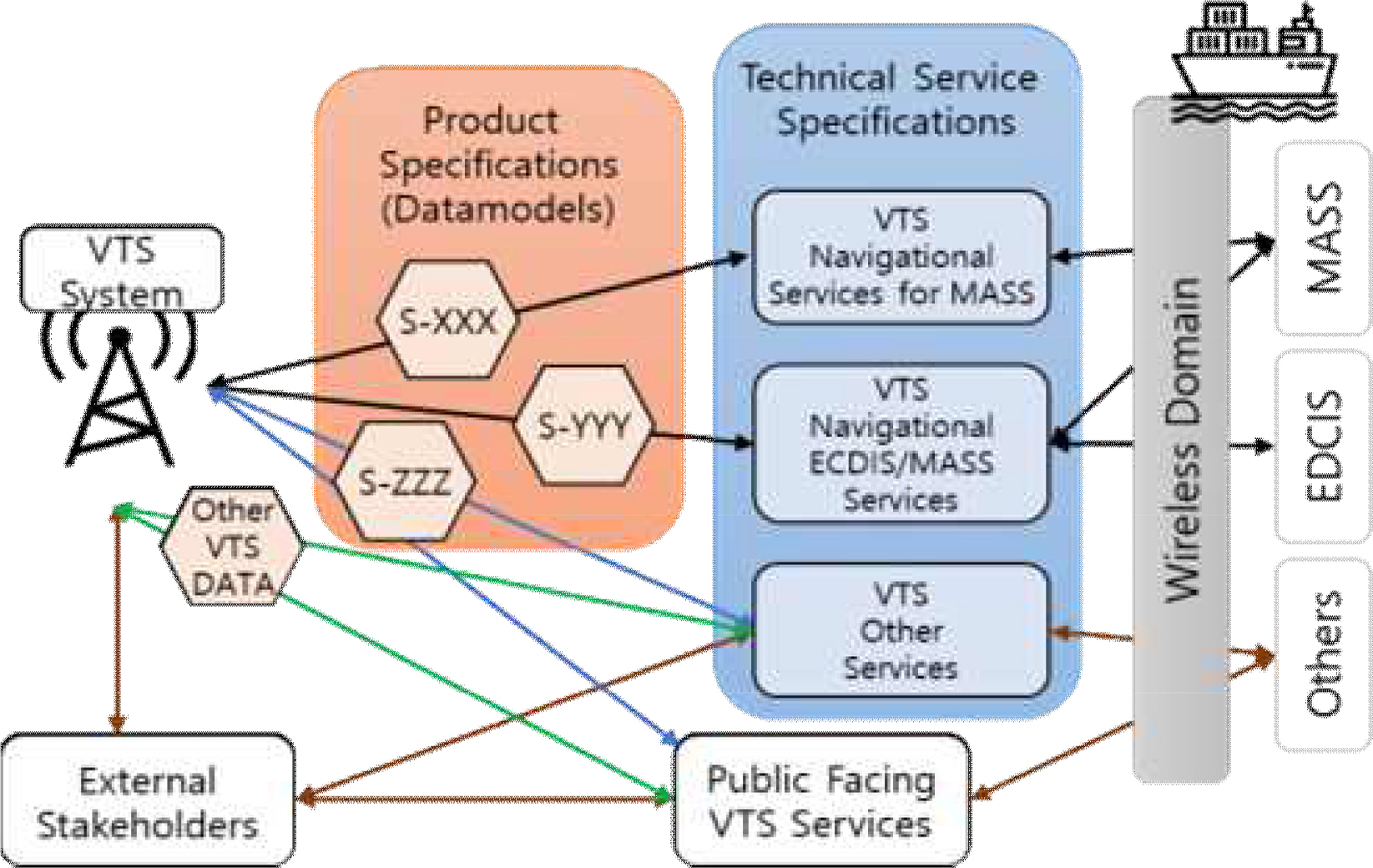
Concept of IALA S-212: Digital delivery of VTS information
3.3 AHP 기법을 활용한 자율운항선박 관제 우선순위 설정
사전 식별된 VTS 업무 및 자율운항선박 관련 IALA 대응 동향 등을 바탕으로 자율운항선박 관제를 위한 필수 업무요소를 파악하고, 선박교통관제사 설문조사 및 AHP 기법 기반 분석을 통하여 이에 대한 우선순위를 도출하였다.
3.3.1 계층 분석적 의사결정(AHP)
계층 분석적 의사결정(Analytic Hierarchy Process, AHP) 방법은 의사결정 문제를 계층 혹은 네트워크 구조를 사용하여 표현하고 대안의 선호도를 개발하는 다 기준 의사결정 모델이다. Saaty(1980)에 따르면, 이 방법은 의사결정자의 판단을 기반으로 하여 목표들 사이의 중요도를 계층적으로 나누고, 각 대안의 중요도를 산정하여 의사결정 분석을 지원한다.
AHP 기법의 중요도를 나타내는 가중치 계산은 고유벡터법을 사용하여 평가지표 간의 상대적 가중치를 추정한다(Choi et al., 2022). 따라서 설문 평가를 종합하기 위하여 개인의 쌍대비교행렬에 고유벡터 계산법을 적용하여 가중치 및 점수에 대한 우선순위 벡터를 구한다. 평가 항목 i와 j 간의 상대적 중요도를 aij로 나타낼 경우의 쌍대비교행렬 A는 식(1)과 같다.
여기서, wi(i = 1,2,...,n)는 i번째 평가 항목의 가중치를 의미하며, 해당 행렬은 원소 aij에 대하여 aij = 1/aji관계가 성립하는 역수 행렬이 된다. 일반적으로 n × n의 쌍대비교행렬 A에 대하여 AW = λW을 만족하는 스칼라 λ와 그에 대응하는 n × 1의 고유벡터 W = [wi]가 존재하며, 이 중 ∑Wi = 1을 만족하는 정규화된 고유벡터를 상대적 가중치로 설정한다(Hong, 2011).
3.3.2 AHP 모델링 및 분석 결과
IALA에서 논의 중인 자율운항선박과 VTS에 관한 내용을 기반으로 관제 절차 마련을 위한 고려 항목을 식별한 결과는 다음과 같다. 우선, 1계층의 경우 VTS 운영 업무 및 통신업무로 구분한다. VTS 운영 업무의 경우 데이터 처리, 상호작용, 교통관리 및 비상 상황 대응으로 다시 구분한다. 통신업무의 경우 정보교환, MASS 등급, 통신 주체 및 통신 방법으로 구분한다. Fig. 4는 도출된 자율운항선박 관제 방안에 대한 AHP 모형화 결과를 나타낸다.
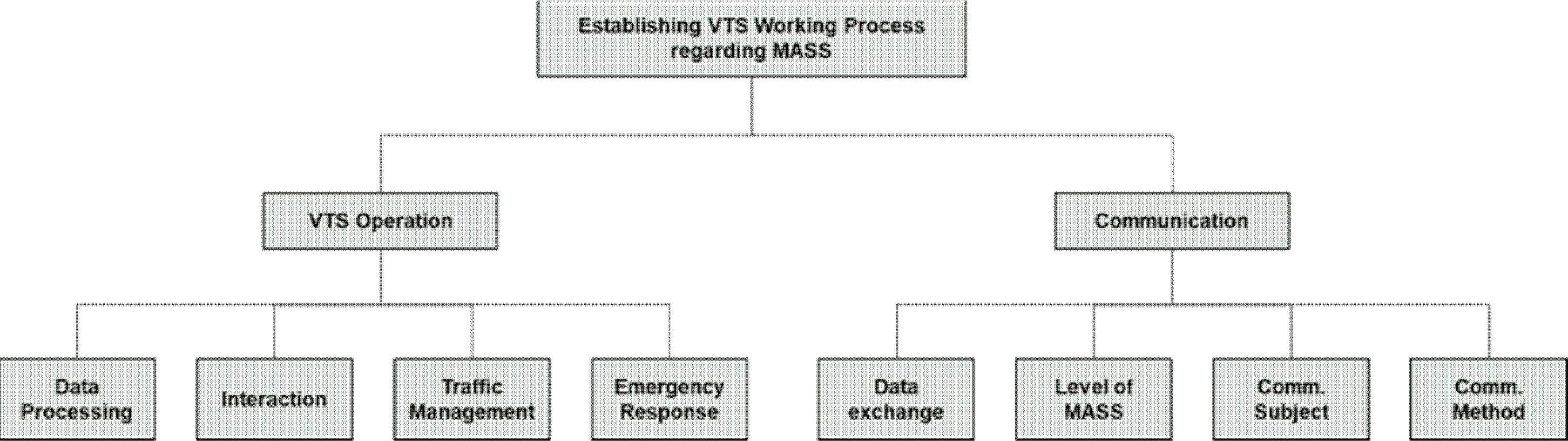
Structure tree for AHP analysis
AHP 기반 설문조사를 위해서 전국 선박교통관제사 120명을 대상으로 설문조사를 수행하였다. Fig. 5에서는 전체 응답자의 연령 및 관제 경력 분포를 보여주고 있다. 연령 분포는 30대가 50.8%로 가장 높았으며, 40대가 36.7%로 30대 및 40대 관제사가 응답 인원의 대부분을 차지하였다. 또한, VTS 관제사 업무 경력은 2년에서 5년 사이가 가장 많았으며, 2년 이하 및 5년에서 10년 사이 순으로 나타났다.
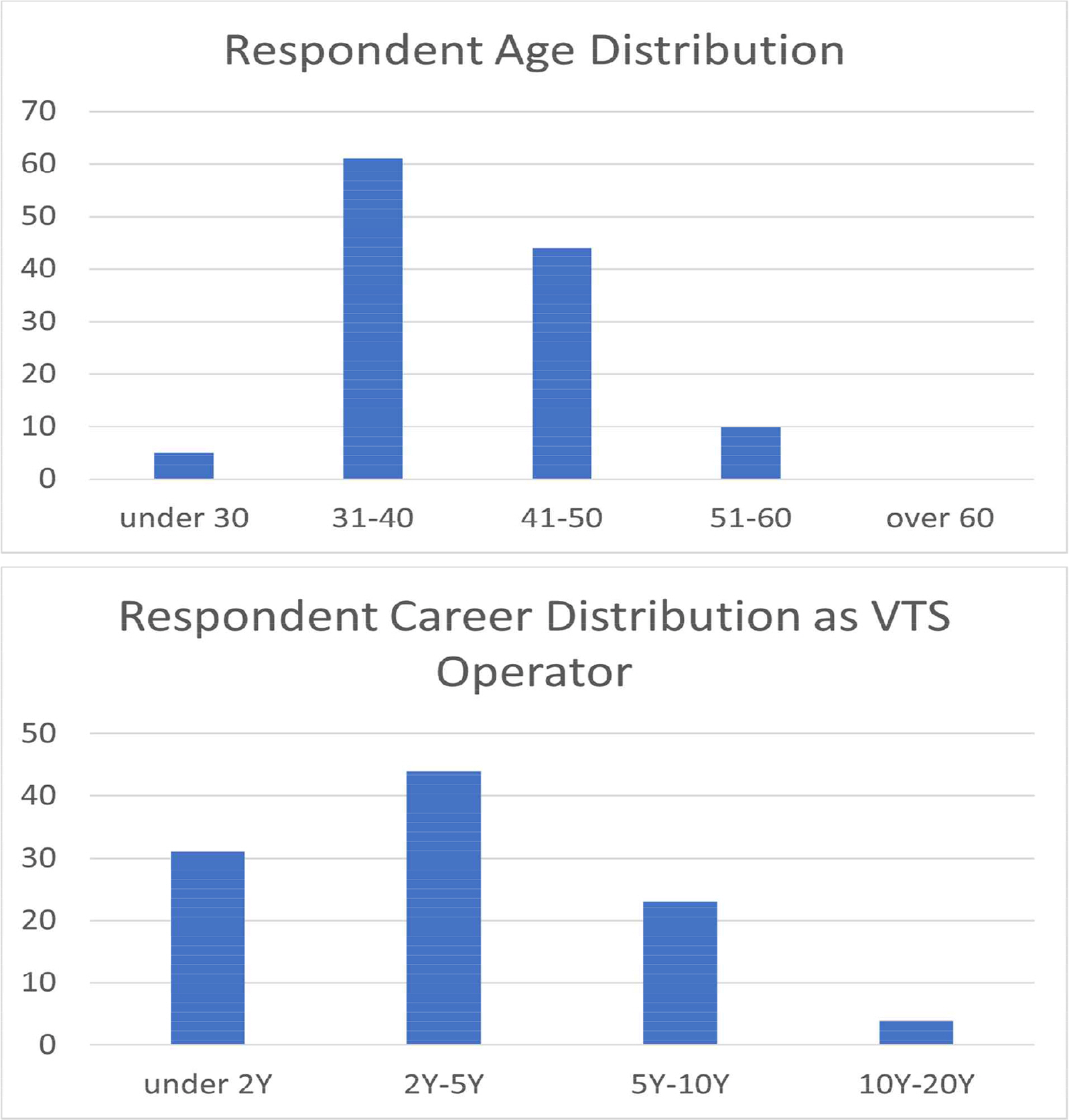
Specification of respondent
전체 응답 부수 중 일관성 비율이 0.2 이하인 유효응답지 19부에 대하여 자율운항선박 관제 업무 우선순위를 도출하였다. 전체 설문지 대비 유효 응답률이 낮은 이유는 현직 관제사의 자율운항선박에 대한 이해가 충분하지 않기 때문으로 판단되며, 향후 추가 연구를 수행할 경우 자율운항선박 및 주변 환경에 대한 충분한 사전 설명이 진행되어야 할 것이다.
Fig. 6은 제1계층의 중요도 비율을 나타낸 것이다. 제1계층인 VTS 운영 업무 및 통신업무의 기하 평균치를 비교한 결과, 통신업무는 0.521, 운영 업무는 0.381로 통신업무가 운영업무보다 약 1.36배 중요하게 생각하고 있는 것으로 나타났다.
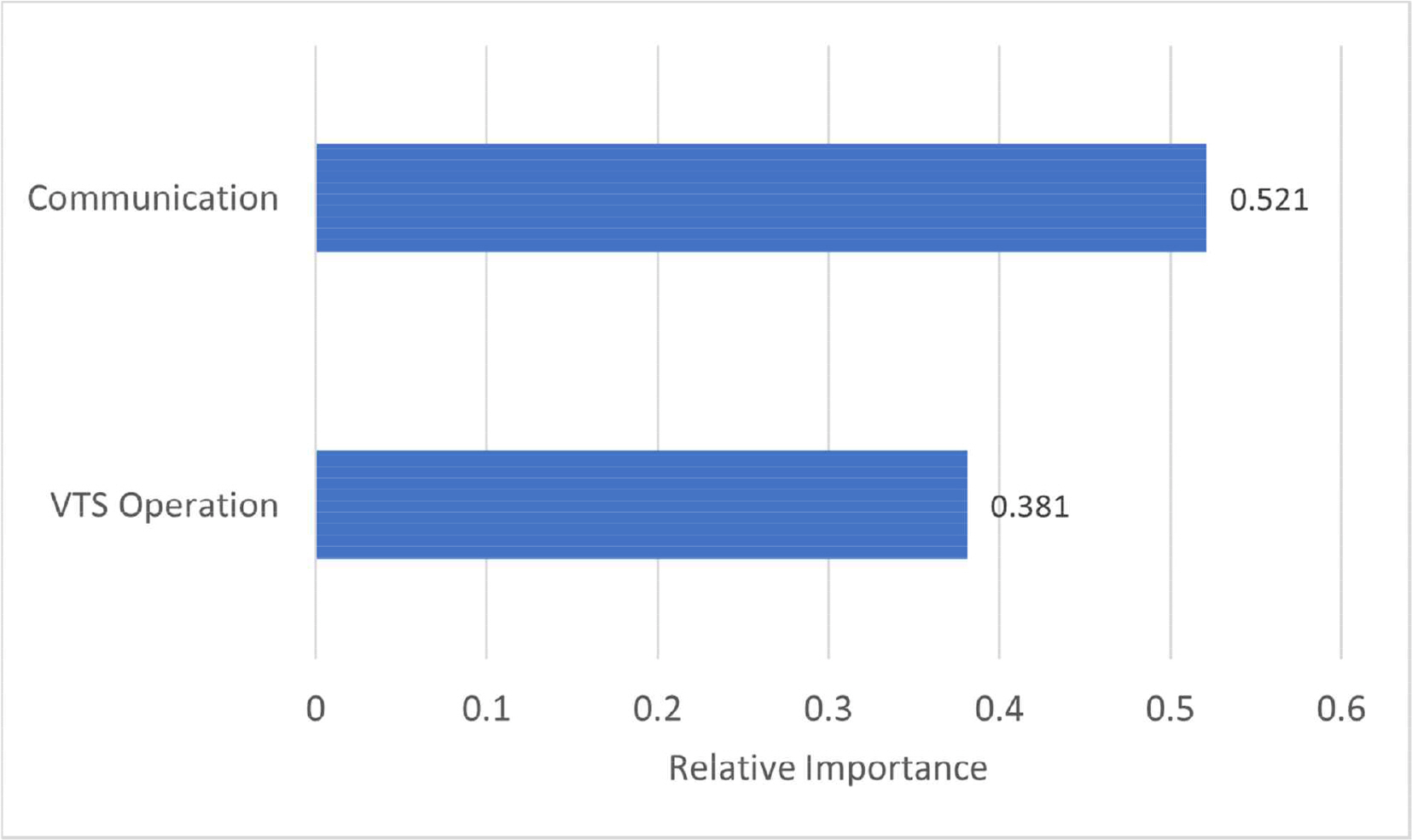
Relative importance of 1st hierarchy in VTS task with emergence of MASS
Fig. 7은 제1계층 요인을 기반으로 한 제2계층 요인들의 기하 평균치의 상대적 중요도를 분석한 결과이다. 전체 8개 항목에 대한 중요도를 분석한 결과, 비상 대응에 관한 중요도가 가장 높았으며, 정보 처리 중요도가 가장 낮은 것으로 나타났다.
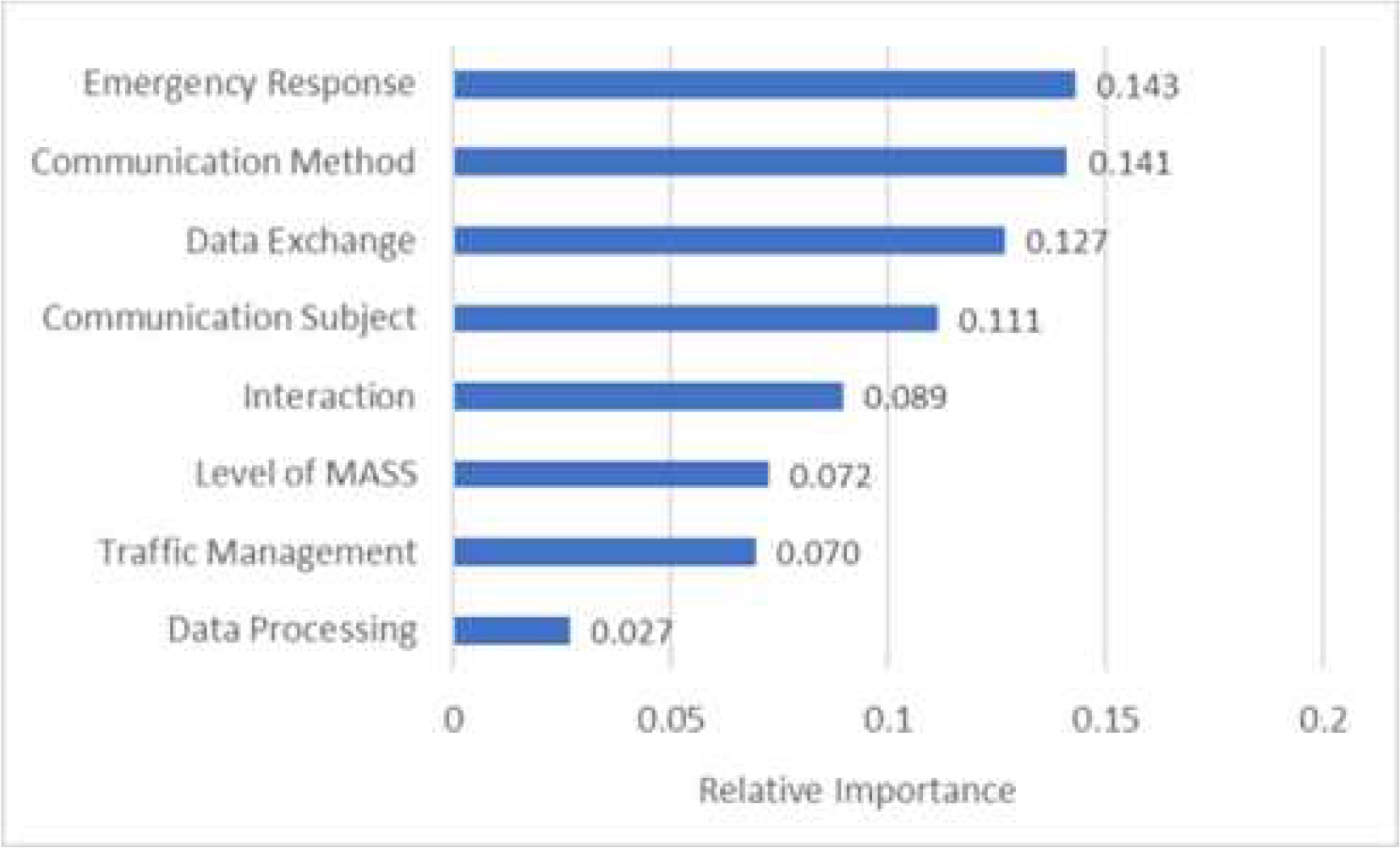
Relative importance of 2nd hierarchy in VTS task with emergence of MASS
제2계층의 중요도 분석 결과, 가장 높은 순위의 중요도와 가장 낮은 순위의 중요도 간의 차이는 약 5.29배 정도임을 알 수 있었으며, 제2계층에 대한 종합 결과의 경우 제1계층 한쪽으로 편중되는 현상 없이 고르게 분포된 것으로 나타났다. 특히, 무인선박을 포함한 높은 자율도의 자율운항선박이 존재할 것으로 예상되는 만큼, 통신 방법 및 통신 주체와 비상 상황 시의 대처 방안에 대한 업무 대응 필요성이 높게 도출된 것을 확인할 수 있다.
4. 자율운항선박 관제 주요 업무 방안
선박교통관제사를 대상으로 한 자율운항선박 관제업무 우선순위로 식별된 통신 방법 및 주체와 비상 상황 대응 등을 고려한 자율운항선박 관제 절차 개념도는 Fig. 8과 같으며 주요 내용은 다음과 같다.

Concept of VTS working procedure with emergence of MASS
1) 관제 절차를 적용받는 자율운항선박은 IMO 자율도 기준 2에서 4 사이의 선박을 의미한다.
2) 자율운항선박이 관제구역에 진입함과 동시에 각종 보고 및 항행 의도 파악을 위하여 VTS 센터와 자율운항선박 간 선박 운항데이터 및 관제 메시지 등을 음성통신이 아닌 데이터 교환 기반의 디지털 관제 시스템으로 변경한다.
3) 자율운항선박 관제는 관찰 확인(1단계), 조언·경고(2단계) 및 지시(3단계)의 총 3단계로 구분되며, 기존 관제 절차에 포함된 정보 제공은 생략한다.
4) 선박의 위치, 접안 여부 및 항해 상태 등의 운항데이터를 기반으로 하여 각종 신고 업무는 모두 자동으로 처리되며, 별도의 음성통신을 위한 신고는 생략한다.
5) 자율운항선박과 기존의 유인 선박이 공존하는 과도기적인 해상교통환경환경에서 항행 의도 파악 및 피항 등의 상호작용이 필요할 경우 VTS 센터에서 자율운항선박의 항행 의도를 유인 선박에 전달하여 통항 위험을 사전에 해소한다.
6) 충돌, 좌초 등 해양사고에 따른 비상 상황 발생 전·후, 혹은 네트워크 단절 및 화재 등과 같은 자율운항선박 자체 비상 상황 발생 시 VTS 센터는 자율운항선박 및 기타 관련 선박의 상황정보를 각 이해관계자에게 신속하게 전달할 수 있어야 하며, 정보 전달 방법은 대상 선박에 따라 음성 및 데이터 등 신속하고 효과적인 방법으로 전달할 수 있어야 한다.
승선원의 존재 여부와 상관없이 자율항해시스템을 기반으로 운항하는 것을 목표로 하는 자율운항 등급 2에서 4 사이의 선박들에 대해서 자율항해시스템과 VTS 센터 간의 유기적인 정보교환 및 업무 협조를 할 수 있을 것으로 기대된다. 이와 더불어 자율운항선박과 기존 유인 선박이 공존하는 과도기적인 해상교통환경에서 대상 해역의 교통안전을 도모해야 하는 VTS의 새로운 업무를 수행할 수 있을 것으로 판단된다.
다만, 이를 구체화하기 위해서는 S-212 및 기타 표준 및 기술 등을 고려한 자율운항선박과 육상 간 통신 방법이 결정되어야 하며, 이와 동시에 자율운항선박과 유인 선박 간 효과적인 의사소통을 위한 다양한 방안들이 함께 필요하다.
5. 결 론
본 연구는 자율운항선박 도입이 선박교통관제 업무에 미치는 영향을 분석하고, 이에 대응하기 위한 변화 방안을 제안하였다. 이를 위하여 자율운항선박 기술 동향 중 육상 측에서 자율운항선박을 지원하는 원격제어 및 육상 지원 서비스의 기술 개발 동향 및 지향점을 확인하였으며, 이와 동시에 선박교통 관제 업무 변화에 관한 기술 표준 등의 국제 동향도 함께 조사하였다.
이를 통하여 자율운항선박 관제에 필요한 요소들을 운영 업무 및 통신업무 측면의 두 그룹으로 구분하고, 그룹별로 네 개의 세부 항목들을 도출하였다. 이후 AHP 기법을 활용하여 현직 선박교통관제사를 대상으로 한 설문조사 결과를 통해 현장 도입 및 절차 마련을 위한 우선순위를 식별하였다. 그 결과 제1계층에서는 통신업무의 기하평균 중요도가 운영 업무의 중요도에 비하여 약 1.36배 높게 나타났으며, 제2계층 항목 간 중요도는 통신 방법 및 통신 주체와 비상 상황 시의 대처 방안에 대한 업무 대응 필요성이 높게 도출되었다.
마지막으로, 자율운항선박 관제를 위한 기술 동향 및 선박 교통관제사 의식 기반 업무 도입 우선순위 선정을 통하여 향후 자율운항선박과 유인 선박이 공존할 경우의 관제 기본 절차 및 개념도를 제시하였다. 보다 신뢰성 있는 AHP 분석 결과를 추가 표본 확보와 현업 적용을 위한 이해관계자 간 의견 수렴 등의 추가 연구를 통하여 자율운항선박 도입에 따른 VTS 업무 변화에 대한 이해를 높이고, 향후 관련 분야의 연구와 실무에 기여할 것으로 기대된다.
Acknowledgements
본 논문은 2023년도 해양수산부 및 해양수산과학기술진흥원 연구비 지원으로 수행된 ‘스마트항만-자율운항선박 연계기술개발(20210631, 자율운항선박 안전 입출항 제어/관제기술 개발)’의 연구결과입니다.