


1. м„ң лЎ
н•ҙмғҒн’Қл ҘлӢЁм§Җ к°ңл°ң мӢң мөңк·ј л§Һмқҙ мҲҳн–үн•ҳкі мһҲлҠ” л¶Җмң мӢқ лқјмқҙлӢӨлҘј нҶөн•ң кҙҖмёЎмқҖ кё°мғҒнғ‘ лҳҗлҠ” кі м •мӢқ лқјмқҙлӢӨмҷҖ 비көҗн•ҳл©ҙ м—¬лҹ¬лӘЁлЎң мң лҰ¬н•ҳлӢӨ. л¶ҖмқҙлҘј м„Өм№ҳн•ҳлҠ” лҚ° н•„мҡ”н•ң мӢңк°„кіј 비мҡ©мқҖ кі м •мӢқ мӢңм„Өл¬јм—җ 비н•ҳл©ҙ мғҒлӢ№нһҲ м ҒмқҖ нҺёмқҙлӢӨ. лҚ”кө°лӢӨлӮҳ кҙҖмёЎ кё°к°„мқҙ лҒқлӮҳкі лӮҳл©ҙ мІ кұ°н•ҳкё°лҸ„ мүҪкі ліөкө¬ нӣ„ нҷҳкІҪм Ғ мҳҒн–ҘлҸ„ м Ғкё° л•Ңл¬ём—җ м§Җм—ӯмӮ¬нҡҢмқҳ л°ҳл°ңлҸ„ мӨ„мқј мҲҳ мһҲлӢӨлҠ” мқҙм җмқҙ мһҲлӢӨ.
к·ёлҹ¬лӮҳ нҳ„мһ¬к№Ңм§ҖлҸ„ мҡ°лҰ¬лӮҳлқјлҠ” н•ҙлӢ№ мһҘ비 л°Ҹ кҙҖмёЎкё°мҲ м—җ лҢҖн•ҳм—¬ н•ҙмҷё мқҳмЎҙлҸ„к°Җ лҶ’мқҖ мӢӨм •мқҙлӢӨ. м§ҖлӮң лӘҮ м„ёкё° лҸҷм•Ҳ м—җл„Ҳм§ҖмҶҢ비лҹүмқҖ нҸӯл°ңм ҒмңјлЎң мҰқк°Җн•ҳмҳҖкі , мқҙм—җ л”°лҘё кё°нӣ„ліҖнҷ”мҷҖ мҳҲмёЎ л¶Ҳк°Җн•ң нҷҳкІҪліҖнҷ”к°Җ мҲҳл°ҳлҗҳкі мһҲм–ҙ мөңк·јм—җлҠ” м№ңнҷҳкІҪ м—җл„Ҳм§Җ мғқмӮ°кіј мҶҢ비м—җ кҙҖмӢ¬мқҙ м–ҙлҠҗ л•ҢліҙлӢӨ лҶ’лӢӨ. н•ңкөӯмқҖ көӯнҶ л©ҙм Ғ лҢҖ비 мқёкө¬л°ҖлҸ„к°Җ лҶ’м•„ мңЎмғҒм—җм„ң н’Қл ҘлӢЁм§ҖлҘј к°ңл°ңн• кіөк°„мқҙ м ҲлҢҖм ҒмңјлЎң л¶ҖмЎұн•ҳл©° н•ҙмғҒмңјлЎңмқҳ 진м¶ңмқҙ л¶Ҳк°Җн”јн•ҳлӢӨ. н•ҳм§Җл§Ң м•„м§Ғ н•ҙмғҒн’Қл Ҙкіј кҙҖл Ёлҗң көӯлӮҙ кё°мҲ кіј кІҪн—ҳмқҙ л¶ҖмЎұн•ҳм—¬ мҷёмӮ° мһҗліёкіј кё°мҲ мқ„ 주축мңјлЎң лӢЁм§Җк°Җ к°ңл°ңлҗҳкі мһҲлӢӨ. к°ңл°ңкіјм •м—җ н•„мҲҳм Ғмқё н’Қнҷ© кҙҖмёЎлҸ„ л§Ҳм°¬к°Җм§ҖмқёлҚ°, көӯлӮҙ кё°мҲ л ҘлҸ„ 축м Ғн•ҳкі мҷёнҷ” мң м¶ңмқ„ мӨ„мқҙкё° мң„н•ҙм„ңлҠ” л¶Җмң мӢқ лқјмқҙлӢӨм—җ лҢҖн•ң көӯмӮ°нҷ”к°Җ н•„мҡ”н•ң мӢңм җмқҙлқј н• мҲҳ мһҲлӢӨ.
н•ңкөӯмқҳ м„ңн•ҙм•ҲмқҖ л„“мқҖ лІ”мң„м—җм„ң лӮ®мқҖ мҲҳмӢ¬ н•ҙм—ӯмқҙ 분нҸ¬н•ҙ мһҲм–ҙ, кІҪм ңм Ғмқё н’Қл Ҙл°ңм „ лӢЁм§Җ мЎ°м„ұмқҙ к°ҖлҠҘн•ҳлӢӨ. лӢӨл§Ң мҲҳмӢ¬мқҙ м–•кі мЎ°м„қ м°Ёк°Җ нҒ¬лҜҖлЎң м§Җм—ӯм—җ л”°лқј к°•н•ң мЎ°лҘҳк°Җ л°ҳліөм ҒмңјлЎң лӮҳнғҖлӮңлӢӨ. мқҙлҹ¬н•ң нҷҳкІҪмЎ°кұҙмқҖ л¶Җмң мӢқ лқјмқҙлӢӨ мҡҙмҳҒ мӢң л§ҺмқҖ мҳҒн–Ҙмқ„ лҒјм№ңлӢӨ.
лқјмқҙлӢӨ л¶ҖмқҙлҠ” м§Җм •лҗң кё°к°„ лҸҷм•Ҳ м•Ҳм •м Ғмқё н’Қнҷ©мһҗлЈҢ мҲҳ집мқҙ мӨ‘мҡ”н•ҳл©°, мҲҳ집мқ„ мң„н•ҙм„ңлҠ” л¶Җмқҙк°Җ кі„лҘҳ мң„м№ҳм—җм„ң мқҙнғҲн•ҳм§Җ м•Ҡм•„м•ј н•ҳлҠ” кІҢ н•„мҲҳм Ғмқё мЎ°кұҙмқҙлӢӨ. м„ңн•ҙм•Ҳм—җм„ңмқҳ л¶Җмң мӢқ лқјмқҙлӢӨ л¶Җмқҙмқҳ м•Ҳм •м Ғмқё н’Қнҷ©мһҗмӣҗ кі„мёЎмқ„ мң„н•ҙ н•ҙмғҒм„Өм№ҳ м „, OrcaFlex н•ҙм„қ лҸ„кө¬лҘј мқҙмҡ©н•ҳм—¬ лҸҷм Ғ мҡҙлҸҷ 분м„қ л°Ҹ кі„лҘҳн•ҙм„қмқ„ мӢңн–үн•ҳмҳҖлӢӨ.
2. л¶Җмң мӢқ лқјмқҙлӢӨ л¶Җмқҙмқҳ лҸҷм Ғн•ҙм„қ л°Ҹ кі„лҘҳн•ҙм„қ
2.1 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ нҠ№м„ұ
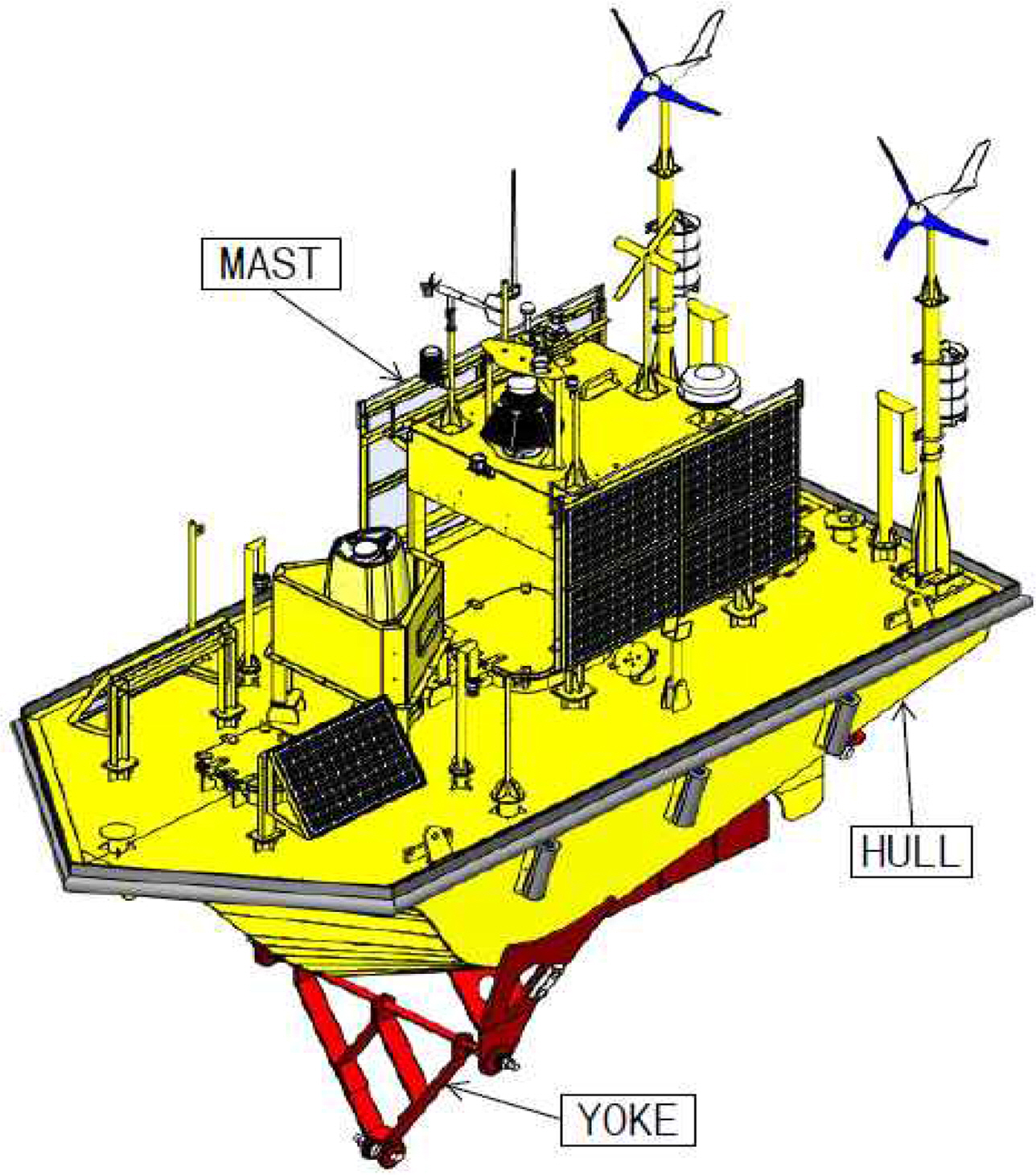
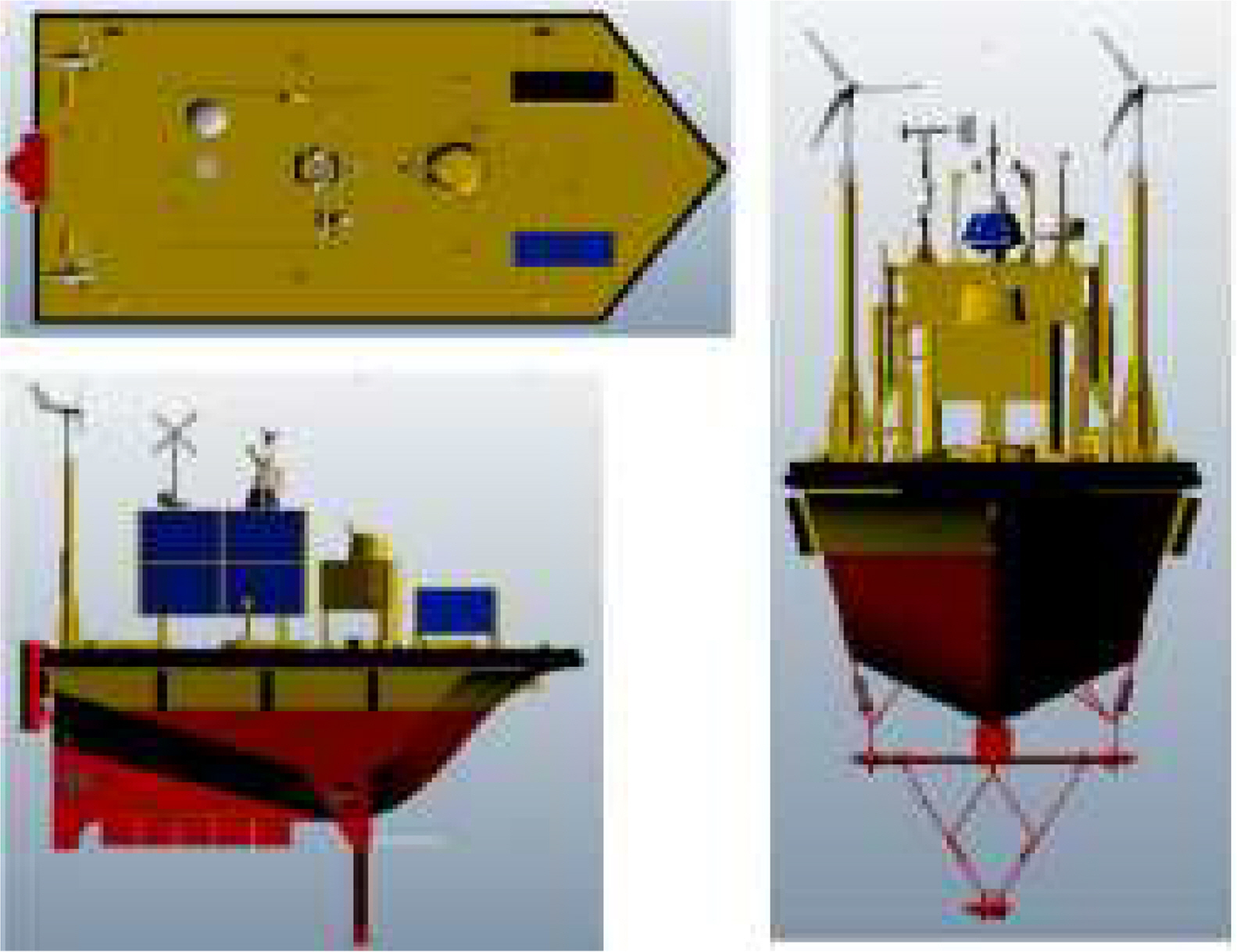
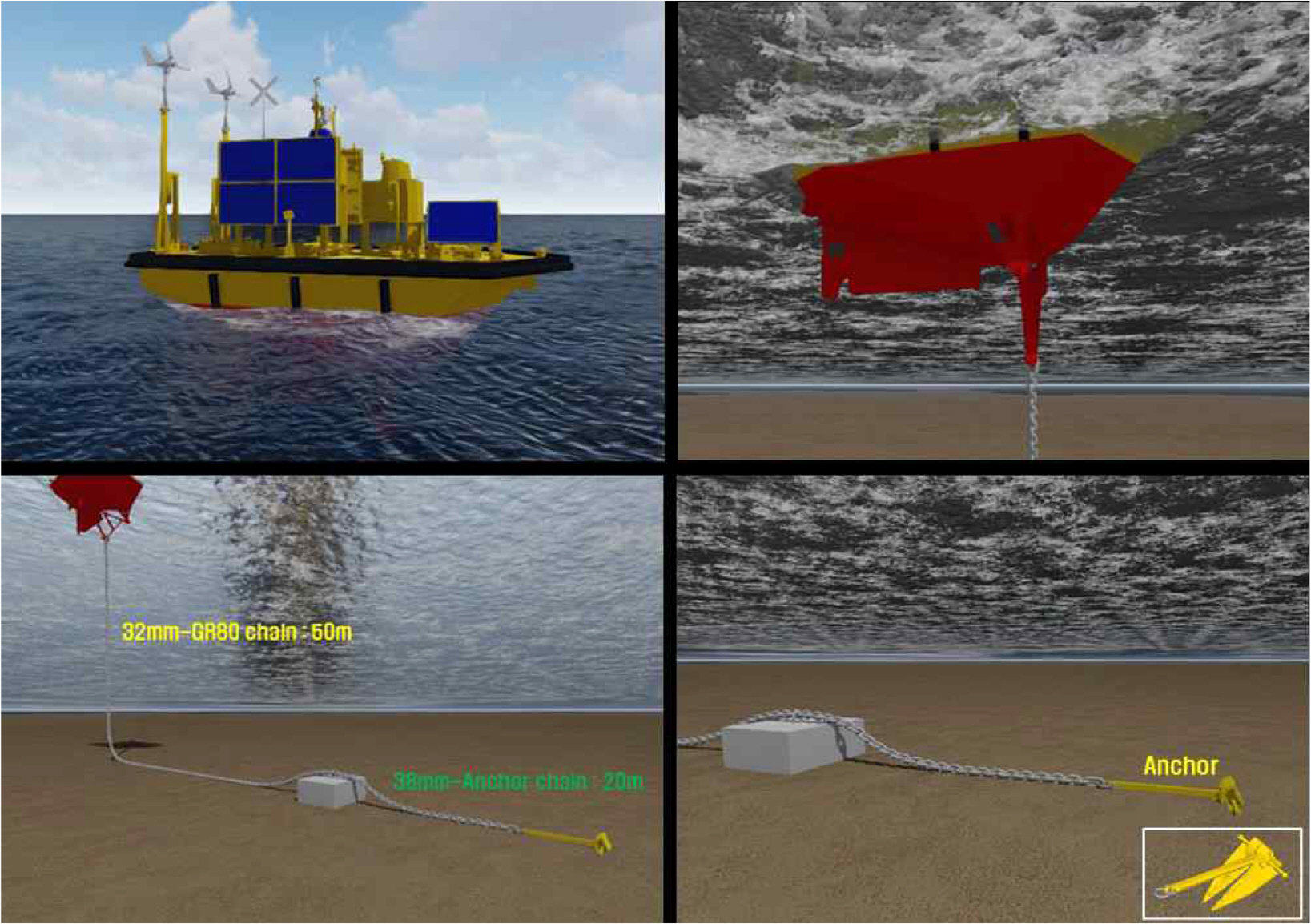
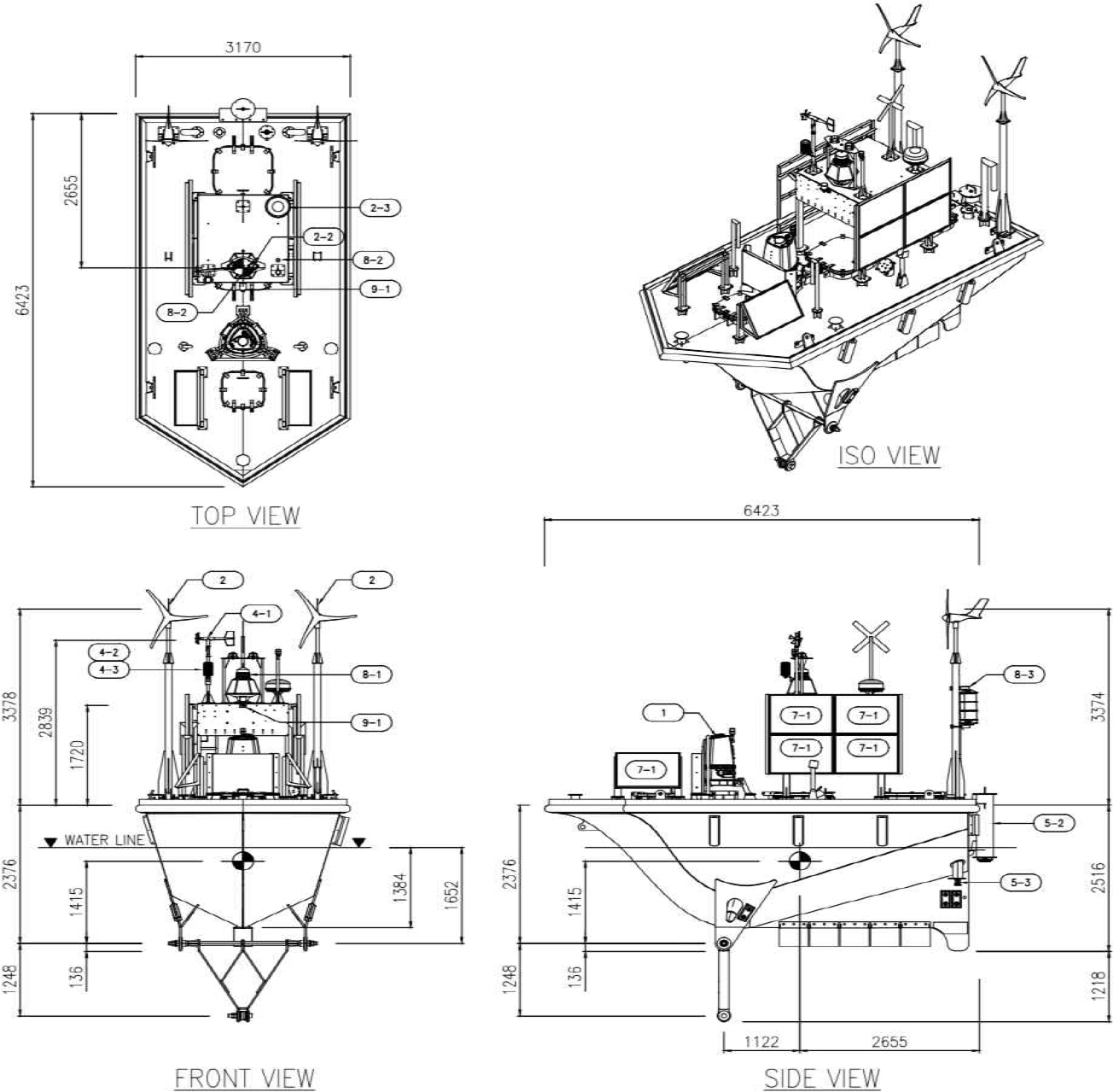
6m м„ л°•нҳ• лқјмқҙлӢӨ л¶ҖмқҙлҠ” Fig. 1кіј Fig. 2м—җм„ң ліј мҲҳ мһҲл“Ҝмқҙ, нҒ¬кІҢ 3к°ңмқҳ лӘЁл“ҲлЎң лӮҳлҲҢ мҲҳ мһҲлӢӨ. мқҙлҘј мӮҙнҺҙліҙл©ҙ л°°н„°лҰ¬мҷҖ мЈјмҡ”мһҘ비к°Җ мӢӨмһҘ лҗҳкі л¶Җл Ҙмқ„ нҳ•м„ұн•ҳлҠ” м„ мІҙ(Hull), мҷёл¶Җ кі„мёЎ мһҘ비 л°Ҹ нғңм–‘кҙ‘ м¶©м „ нҢЁл„җмқҙ мһҘм°©лҗң л§ҲмҠӨнҠё(Mast), к·ёлҰ¬кі н•ҙмғҒм—җм„ң мқјм • кө¬м—ӯ лӮҙм—җ м„ мІҙлҘј м •м№ҳмӢңнӮӨлҠ” кі„лҘҳ мһҘм№ҳк°Җ к·ёкІғмқҙлӢӨ.
2.2 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ кі„лҘҳ мӢңмҠӨн…ң
2.2.1 кё°мғҒкҙҖмёЎ л¶Җмқҙмқҳ кі„лҘҳл°©мӢқ
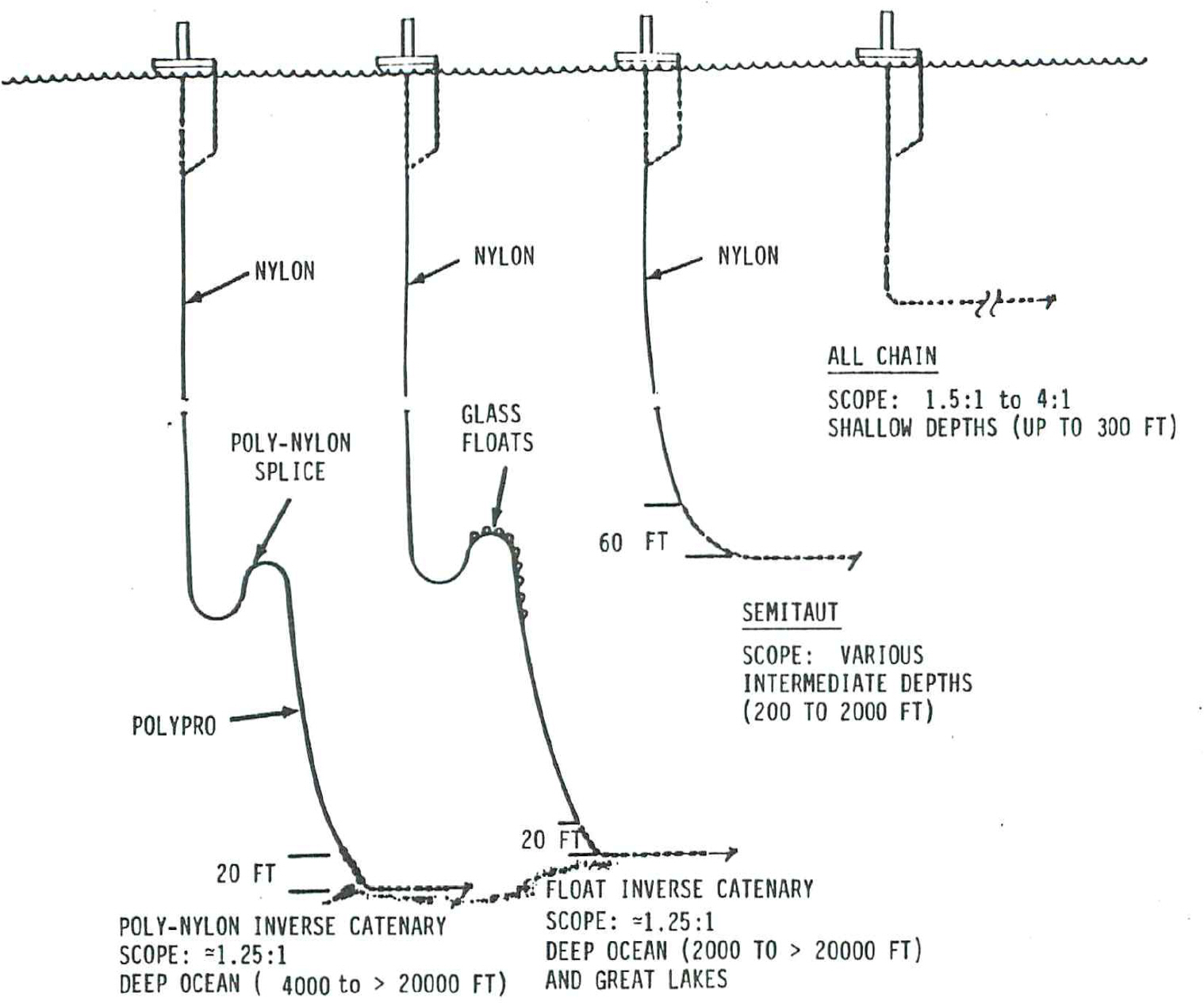
лҜёлҢҖкё°н•ҙм–‘кё°мғҒмІӯ(NOAA) мӮ°н•ҳмқҳ лҚ°мқҙн„°л¶Җмқҙм„јн„°(NDBC)м—җм„ңлҠ” лӢӨм–‘н•ң нҳ•мӢқмқҳ кі„лҘҳм„Өкі„ н‘ңмӨҖм•Ҳкіј кі„лҘҳм„Өкі„ л§Өлүҙм–јмқ„ к°ңл°ңн•ҳмҳҖлӢӨ. м•һм„ң м–ёкёүн•ң л§Өлүҙм–јм—җ л”°лҘҙл©ҙ Fig. 3мқҳ лҸ„н•ҙмҷҖ к°ҷмқҙ кі„лҘҳн•ҳлҠ” н•ҙм—ӯмқҳ мҲҳмӢ¬м—җ л”°лқј кі„лҘҳлқјмқё л°©мӢқмқҖ нҒ¬кІҢ лӢ¬лқјм§Җл©°, мІңн•ҙ(90m мқҙлӮҙ), мӨ‘к°„ мҲҳмӢ¬(600m мқҙлӮҙ), лҢҖ мҲҳмӢ¬(600m мқҙмғҒ 6,000m мқҙлӮҙ)мҡ© кі„лҘҳ мӢңмҠӨн…ңмңјлЎң 분лҘҳн• мҲҳ мһҲлӢӨ.
1) All-chain кі„лҘҳл°©мӢқмқҖ к°ҖмһҘ мҳӨлһҳлҗң л°©мӢқ мӨ‘ н•ҳлӮҳмқҙл©° к°ҖмһҘ лӢЁмҲңн•ң м ‘к·јлІ•мқҙлӢӨ. м Ғмҡ© к°ҖлҠҘн•ң мҲҳмӢ¬мқҖ м•Ҫ 90mк№Ңм§Җмқҙл©° 비көҗм Ғ м–•мқҖ мҲҳмӢ¬м—җм„ң мқҙмҡ©н•ҳлҠ” кі„лҘҳл°©мӢқмқҙлӢӨ. м „мІҙк°Җ мІҙмқёмңјлЎң кө¬м„ұлҗҳм–ҙ мһҲмңјлҜҖлЎң к°ҖмһҘ лҶ’мқҖ к°•лҸ„лҘј к°Җм§Ҳ мҲҳ мһҲм§Җл§Ң мҡ°л ӨлҗҳлҠ” л¶Җ분мқҖ мІҙмқёмқҙ л¶Җмқҙм—җ к°Җн•ҳлҠ” н•ҳмӨ‘мқҙлӢӨ.
2) Semitaut кі„лҘҳл°©мӢқмқҖ мІҙмқёкіј лӮҳмқјлЎ лЎңн”„мқҳ мЎ°н•©мңјлЎң мқҙлЈЁм–ҙм ё мһҲлӢӨ. All-chain л°©мӢқмқ„ мӨ‘к°„ мҲҳмӢ¬м—җм„ң мқҙмҡ©н•ҳкё°м—” л¶Җмқҙм—җ к°ҖмӨ‘лҗҳлҠ” н•ҳмӨ‘мқҙ л„Ҳл¬ҙ м»Өм„ң л¶Җмқҙмқҳ л¶Җл Ҙмқ„ мҙҲкіјн• мҲҳ мһҲлӢӨ. л”°лқјм„ң 60mвҲј600m мӮ¬мқҙмқҳ мҲҳмӢ¬м—җм„ңлҠ” Semitaut кі„лҘҳл°©мӢқмқ„ мЈјлЎң мқҙмҡ©н•ңлӢӨ. л¶Җмқҙм—җ м—°кІ°лҗҳлҠ” мғҒл¶Җ мІҙмқёкіј м•өм»ӨмҷҖ м—°кІ°лҗҳлҠ” н•ҳл¶Җ мІҙмқё мӮ¬мқҙм—җ м Ғм •кёёмқҙмқҳ лӮҳмқјлЎ лЎңн”„лҘј м—°кІ°н•ҳм—¬ кө¬м„ұн•ҳм—¬ мӮ¬мҡ©н•ңлӢӨ.
3) Inverse-Catenary кі„лҘҳл°©мӢқмқҖ 600m мқҙмғҒмқҳ к№ҠмқҖ мҲҳмӢ¬м—җм„ң мқҙмҡ©лҗңлӢӨ. NDBCлҠ” л¶Җмң л°©мӢқм—җ л”°лқј Inverse-Catenary кі„лҘҳл°©мӢқмқ„ л‘җ к°Җм§ҖлЎң лӮҳлҲҲлӢӨ. нҳ„мһ¬ мң лҰ¬ л¶Җл ҘмІҙ л°©мӢқмқҖ мҳӨлҢҖнҳём—җм„ң мЈјлЎң мӮ¬мҡ©лҗңлӢӨ(лӢҙмҲҳлЎң кө¬м„ұлҗҳм–ҙ лҚ” л§ҺмқҖ л¶Җл Ҙмқ„ н•„мҡ”). нҸҙлҰ¬н”„лЎңн•„л Ң лЎңн”„ л°©мӢқмқҖ мң лҰ¬ л¶Җл ҘмІҙ л°©мӢқліҙлӢӨ л°°м№ҳн•ҳкё°к°Җ лҚ” мүҪкі м Җл ҙн•ҳлӢӨ. к·ёлҹ¬лӮҳ мӨ‘м„ұ л¶Җл Ҙ нҳ•м„ұм—җ н•„мҡ”н•ң л¶Җл Ҙмқ„ нҸҙлҰ¬н”„лЎңн•„л Ң лЎңн”„лЎңл§Ң л§Ңл“Өкё° л•Ңл¬ём—җ, мқҙ кө¬м„ұм—җлҠ” лЎңн”„мқҳ м§ҖлҰ„кіј кёёмқҙм—җ л”°лҘё мөңмҶҢ к№Ҡмқҙ м ңн•ңмқҙ мһҲмқ„ мҲҳ мһҲлӢӨ.
м„ңн•ҙм•Ҳмқҳ нҸүк· мҲҳмӢ¬мқҖ 55mмқҙкё° л•Ңл¬ём—җ лҢҖл¶Җ분 н•ҙм—ӯм—җм„ң All-chain л°©мӢқмқҙ мң нҡЁн•ҳлӢӨ. мӢӨн—ҳмқ„ мң„н•ң н•ҙм—ӯмқҖ мҲҳмӢ¬мқҙ 25m(н•ҙлҸ„ кё°мӨҖл©ҙ: м•Ҫмөңм Җм ҖмЎ°л©ҙ кё°мӨҖ)лЎң All-chain л°©мӢқмқ„ м„ нғқн•ҳмҳҖлӢӨ. (NOAA, 1989)
2.2.2 м„ңн•ҙм•Ҳм—җм„ңмқҳ кі„лҘҳ мӢңмҠӨн…ң
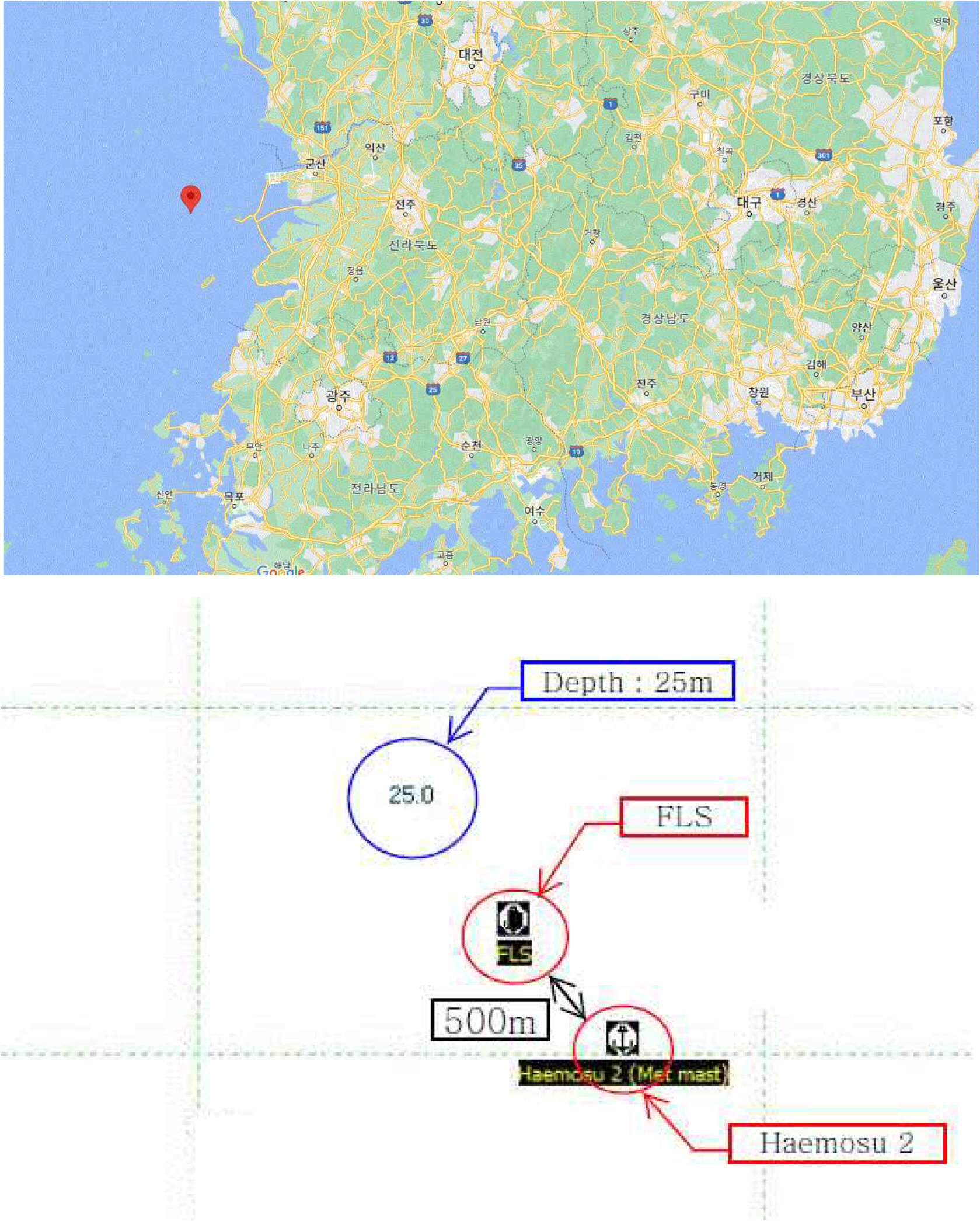
н’Қл Ҙл°ңм „лӢЁм§ҖлҘј мЎ°м„ұн•ҳкё° мң„н•ң н•ҙмҷёмқҳ м—…мІҙл“ӨмқҖ л¶Җмң мӢқ лқјмқҙлӢӨлЎңл¶Җн„° м–»лҠ” н’Қнҷ©мһҗмӣҗ мһҗлЈҢмқҳ мғҒм—…м Ғ мқҙмҡ©мқ„ мң„н•ң мөңмҶҢн•ңмқҳ кё°мӨҖмңјлЎң Carbon Trustмқҳ OWA Stage 2 мқёмҰқмқ„ мҡ”кө¬н•ҳкі мһҲлӢӨ. Stage 2 мқёмҰқмқ„ мң„н•ҙм„ңлҠ” кі м •мӢқ н’Қнҷ© кі„мёЎ мһҘ비мҷҖ 비көҗкҙҖмёЎмқҙ н•„мҡ”н•ҳл©° Carbon Trust RP 73~87мқ„ к·јкұ° кё°мӨҖмңјлЎң 비көҗкҙҖмёЎмқ„ 진н–үн•ҙм•ј н•ңлӢӨ. 비көҗкҙҖмёЎмқ„ мң„н•ҙ кө°мӮ°мқҳ н•ҙлӘЁмҲҳ 2нҳё кі м •мӢқ кё°мғҒнғ‘мқ„ кё°мӨҖм§Җм җмңјлЎң л°ҳкІҪ 500mмқҳ м§Җм җмқ„ м„ м •н•ҳмҳҖлӢӨ. мҲҳмӢ¬кіј мўҢн‘ңлҠ” Table 2мҷҖ к°ҷкі , мўҢн‘ңмқҳ лҢҖлһөм Ғмқё мң„м№ҳлҘј лӮҳнғҖлӮҙлҠ” н•ҙлҸ„мҷҖ мҲҳмӢ¬мқ„ нҷ•мқён• мҲҳ мһҲлҠ” мң„м№ҳлҸ„лҠ” Fig. 4мҷҖ к°ҷлӢӨ. (CARBON TRUST, 2016)
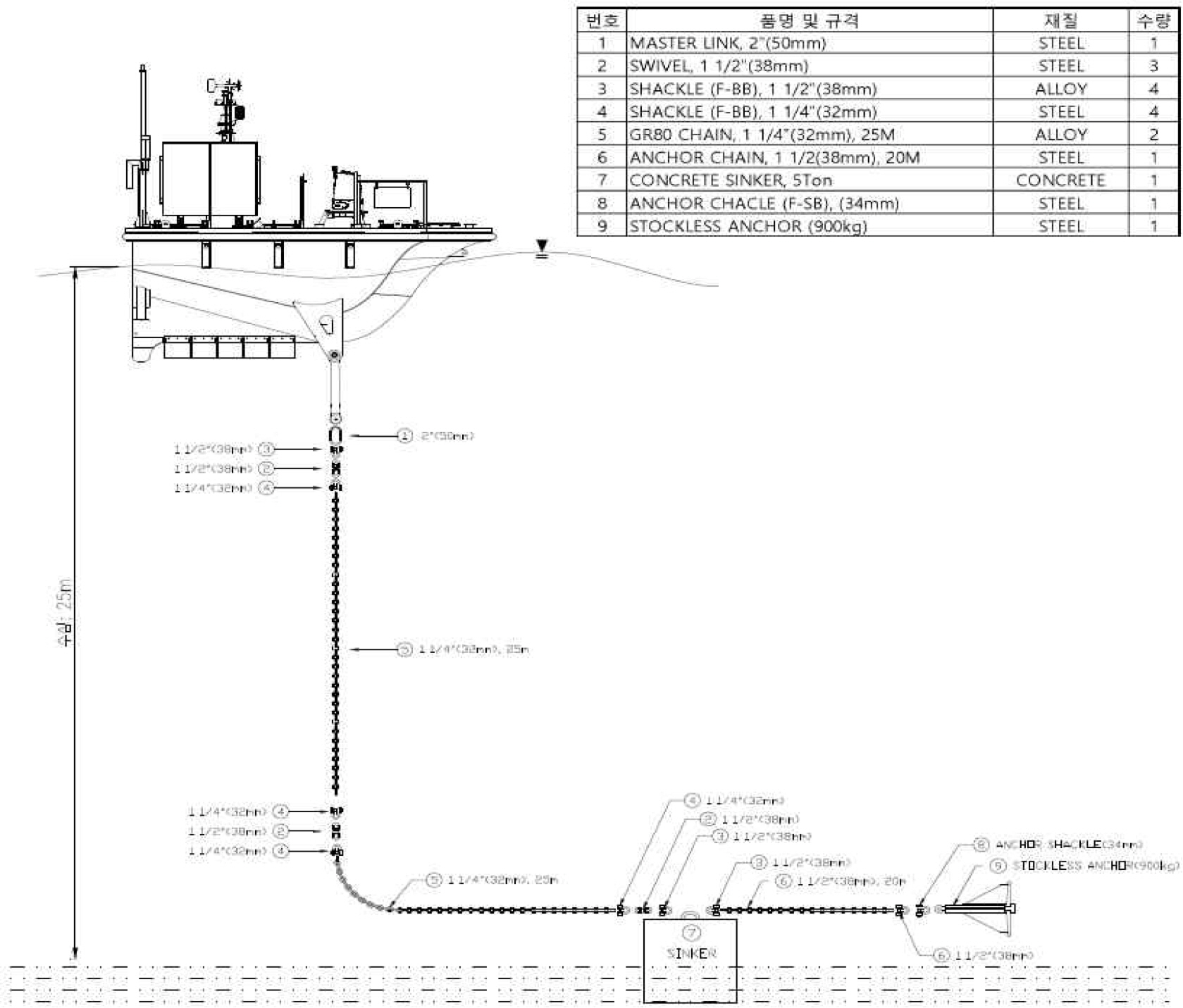
мҲҳмӢ¬ 25mм—җ м Ғм Ҳн•ң 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ кі„лҘҳ мӢңмҠӨн…ңмқ„ кө¬м„ұн•ҙліҙл©ҙ Fig. 5мҷҖ к°ҷмқҙ лӮҳнғҖлӮј мҲҳ мһҲмңјл©°, мқҙлҘј мӢң뮬л Ҳмқҙм…ҳ лҸ„кө¬лҘј мқҙмҡ©н•ҳм—¬ 3м°Ёмӣҗм ҒмңјлЎң н‘ңнҳ„н•ҳл©ҙ Fig. 6кіј к°ҷмқҙ лӮҳнғҖлӮј мҲҳ мһҲлӢӨ. кі„лҘҳ мӢңмҠӨн…ңмқ„ кө¬м„ұн•ҳкі мһҲлҠ” к°Ғ кө¬м„ұн’Ҳмқҳ нҠ№м„ұ лҚ°мқҙн„°лҠ” Table 3м—җ м—ҙкұ°н•ҳмҳҖлӢӨ. кі„лҘҳлқјмқёмқҳ кёёмқҙ 비мңЁмқҖ кі„лҘҳ мҲҳмӢ¬кіј л°©мӢқм—җ л”°лқј мҲҳмӢ¬мқҳ 1.5вҲј4л°°лҘј мӮ°м •н•ҳкі мһҲмңјл©° мЈјліҖкіјмқҳ мҲҳмӢ¬ м°Ёмқҙк°Җ нҒ¬м§ҖлҠ” м•ҠмңјлӮҳ мЎ°м„қ м°Ёк°Җ нҒ° н•ҙлӢ№ н•ҙм—ӯмқҳ нҷҳкІҪ нҠ№м„ұмқ„ кі л Өн•ҳм—¬ мҲҳмӢ¬мқҳ 2л°°мқё 50mмқҳ кёёмқҙлҘј мӨ¬кі , кі„лҘҳкө¬м—ӯмқҳ кі м •м җм—җм„ң мҲҳм§Ғ мһҘл Ҙмқ„ м ңм–ҙн•ҳкё° мң„н•ң 5tefмқҳ мҪҳнҒ¬лҰ¬нҠё мӢұм»ӨлҘј мӮ¬мҡ©н•ҳмҳҖлӢӨ. н•ҙлӢ№ н•ҙм—ӯмқҖ л»ҳкіј лӘЁлһҳ мЎ°к°ңк»Қм§Ҳ(S, M, Sh) л“ұмқҙ нҳјн•©лҗң н•ҙм ҖлҘј кө¬м„ұн•ҳкі мһҲм–ҙ, мҪҳнҒ¬лҰ¬нҠё мӢұм»Өк°Җ мҷ„м „нһҲ м•Ҳм°©н•ҳкё° м „к№Ңм§ҖлҠ” мЈјл¬ҳ(Dragging Anchor) мғҒнҷ©мқҙ л°ңмғқн• мҲҳ мһҲлӢӨ. мқҙм—җ л”°лқј мҲҳнҸү л°©н–Ҙмқҳ нҢҢм§Җл Ҙмқ„ лҶ’мқҙкё° мң„н•ҙ кі„лҘҳлқјмқё лҒқм—җ 900kgf л¬ҙкІҢмқҳ Stockless AnchorлҘј 추к°ҖлЎң кө¬м„ұн•ҳмҳҖлӢӨ.
2.3 мҲҳм№ҳлӘЁлҚёл§Ғ л°Ҹ н•ҙм„қ
л°”лһҢ, нҢҢлҸ„, мЎ°лҘҳмқҳ нҷҳкІҪ н•ҳмӨ‘ н•ҳм—җм„ң 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ мҡҙлҸҷ л°Ҹ кі„лҘҳм„ұлҠҘмқ„ нҸүк°Җн•ҳкё° мң„н•ҳм—¬ OrcaWaveмҷҖ OrcaFlexлҘј мқҙмҡ©н•ҳм—¬ мҲҳм№ҳн•ҙм„қмқ„ мҲҳн–үн•ҳмҳҖлӢӨ. (Orcina Ltd, 2013)
2.3.1 OrcaWave / Orcaflex
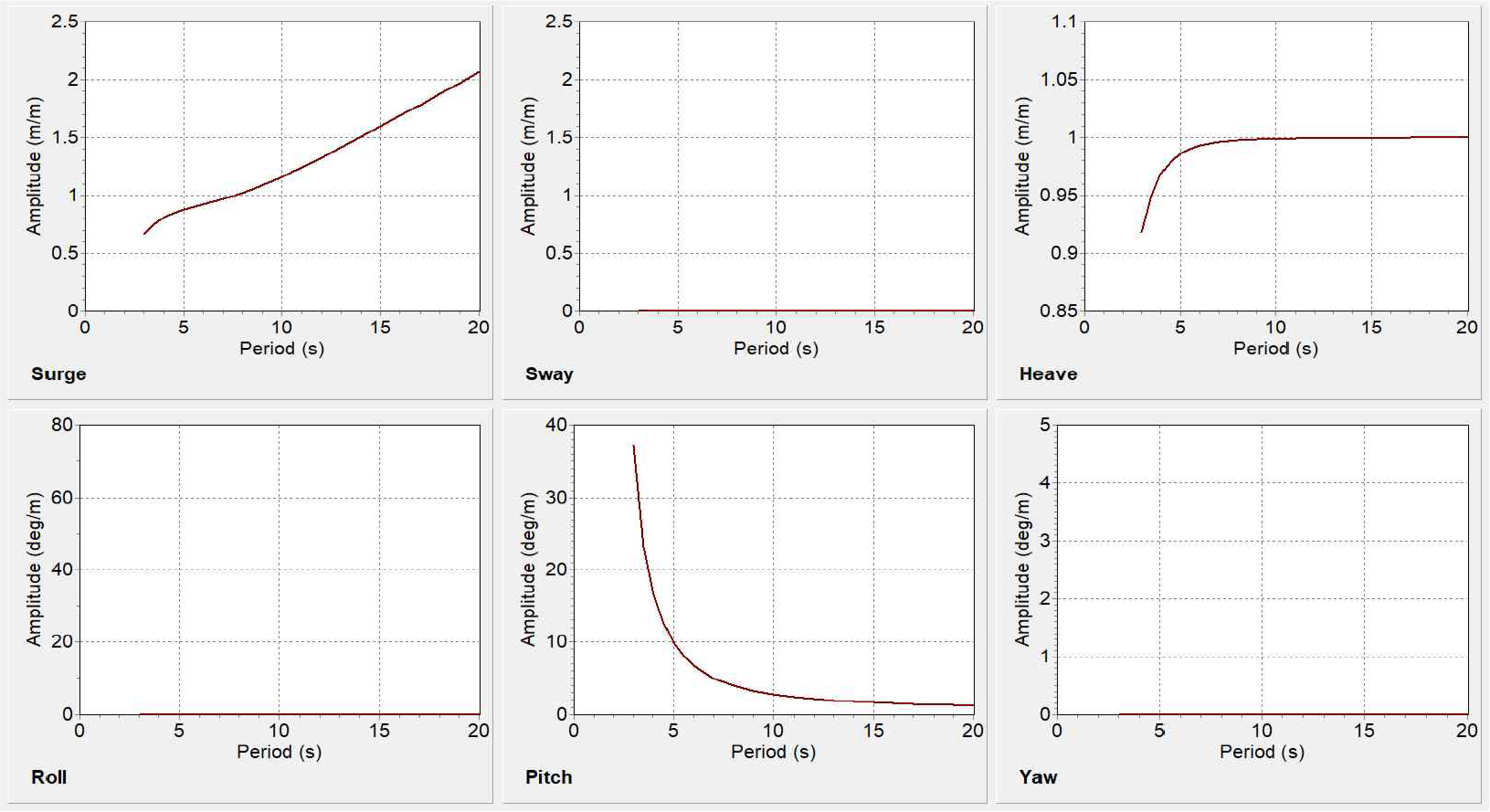
OrcaWaveлҠ” Orcina, Ltd.м—җм„ң к°ңл°ңн•ң нҡҢм Ҳ 분м„қ(Diffraction analysis) н”„лЎңк·ёлһЁмңјлЎңм„ң, нҸ¬н…җм…ң нқҗлҰ„ мқҙлЎ (Potential flow theory)мқ„ нҶөн•ҙ н‘ңл©ҙнҢҢ(Surface wave)лЎң мқён•ҙ л¬јм—җ мһ кё°лҠ” л¬јмІҙмқҳ н•ҳмӨ‘ л°Ҹ мқ‘лӢөмқ„ кі„мӮ°н•ңлӢӨ. OrcaWaveлҠ” 6m NOMAD LiDAR Buoyмқҳ 6 мһҗмң лҸ„ мҡҙлҸҷмқё RAO(Response Amplitude Operator : мқ‘лӢө 진нҸӯ м—°мӮ°мһҗ) мғқм„ұмқ„ мң„н•ҙ мӮ¬мҡ©н•ҳмҳҖлӢӨ.
OrcaFlexлҠ” мӢңк°„ мҳҒм—ӯм—җм„ңмқҳ лӢӨмҲҳмқҳ л¬јмІҙ, мң мІҙ м—ӯн•ҷ мӢң뮬л Ҳмқҙм…ҳ н”„лЎңк·ёлһЁмңјлЎңм„ң, мҶ”лҰ¬л“ң кө¬мЎ°мҷҖ м„ мңјлЎң м—°кІ°лҗң л¶Җмң мІҙмқҳ лҸҷм Ғ кұ°лҸҷ мӢң뮬л Ҳмқҙм…ҳм—җ мөңм Ғнҷ”лҗҳм–ҙ мһҲлӢӨ. кі„лҘҳлқјмқёмқҖ мң н•ң мҡ”мҶҢ кё°мҲ мқ„ мӮ¬мҡ©н•ҳм—¬ лӘЁлҚёл§Ғ н• мҲҳ мһҲлӢӨ. OrcaFlex лӘЁлҚём—җлҠ” к°•м„ұ, л¶Җк°Җм§Ҳлҹү л°Ҹ к°җмҮ , н•ҙм Җ л§Ҳм°° л°Ҹ кё°нғҖ л¬јлҰ¬нҡЁкіјлҘј нҸ¬н•Ён•ҳкі мһҲлӢӨ. лҳҗн•ң, л¶Җмң мӢқ/кі м •мӢқ кө¬мЎ°л¬ј, мҲҳмӨ‘ кө¬мЎ°л¬јкіј мғҒнҳё м—°кІ°лқјмқёмқ„ нҸ¬н•Ён•ҳкі мһҲлҠ” ліөмһЎн•ң мӢңмҠӨн…ңм—җ лҢҖн•ҙм„ңлҸ„ к·ё кІ°кіјк°Җ л§Өмҡ° м •нҷ•н•ҳкі нҡЁмңЁм Ғмқё мӢң뮬л Ҳмқҙн„°лЎң м•Ңл Өм ё мһҲлӢӨ.
OrcaWaveлҘј нҶөн•ҙ мғқм„ұлҗң RAOлҘј нҷңмҡ©н•ҳм—¬ OrcaFlexм—җм„ң н”ҢлЎңнҢ… л¶ҖмқҙмҷҖ мқјм җ нҳ„мҲҳмӢқ кі„лҘҳ мӢңмҠӨн…ңмқ„ лӘЁлҚёл§Ғн•ҳкі н”ҢлЎңнҢ… лқјмқҙлӢӨ л¶Җмқҙмқҳ мӢңк°„ мҳҒм—ӯ лҸҷм Ғ кұ°лҸҷ л°Ҹ кі„лҘҳ м•Ҳм •м„ұмқ„ нҸүк°Җн•ҳмҳҖлӢӨ. мқјм • м§ҖмҶҚмӢңк°„ лҸҷм•Ҳ мӢң뮬л Ҳмқҙм…ҳмқ„ нҶөн•ҙ м•„лһҳмҷҖ к°ҷмқҖ мЈјмҡ” кІ°кіјл¬јмқ„ лҸ„м¶ңн• мҲҳ мһҲм—ҲлӢӨ.
в—Ҹ кі„лҘҳлқјмқём—җ кұёлҰ¬лҠ” мһҘл Ҙ
в—Ҹ н”ҢлЎңнҢ… л¶Җмқҙмқҳ м№ЁмҲҳ к°ҖлҠҘм„ұ
в—Ҹ н”ҢлЎңнҢ… л¶Җмқҙмқҳ кё°мҡёкё° ліҖнҷ”лҹү
2.3.2 OrcaWave : нҡҢм Ҳн•ҙм„қ(Diffraction analysis)
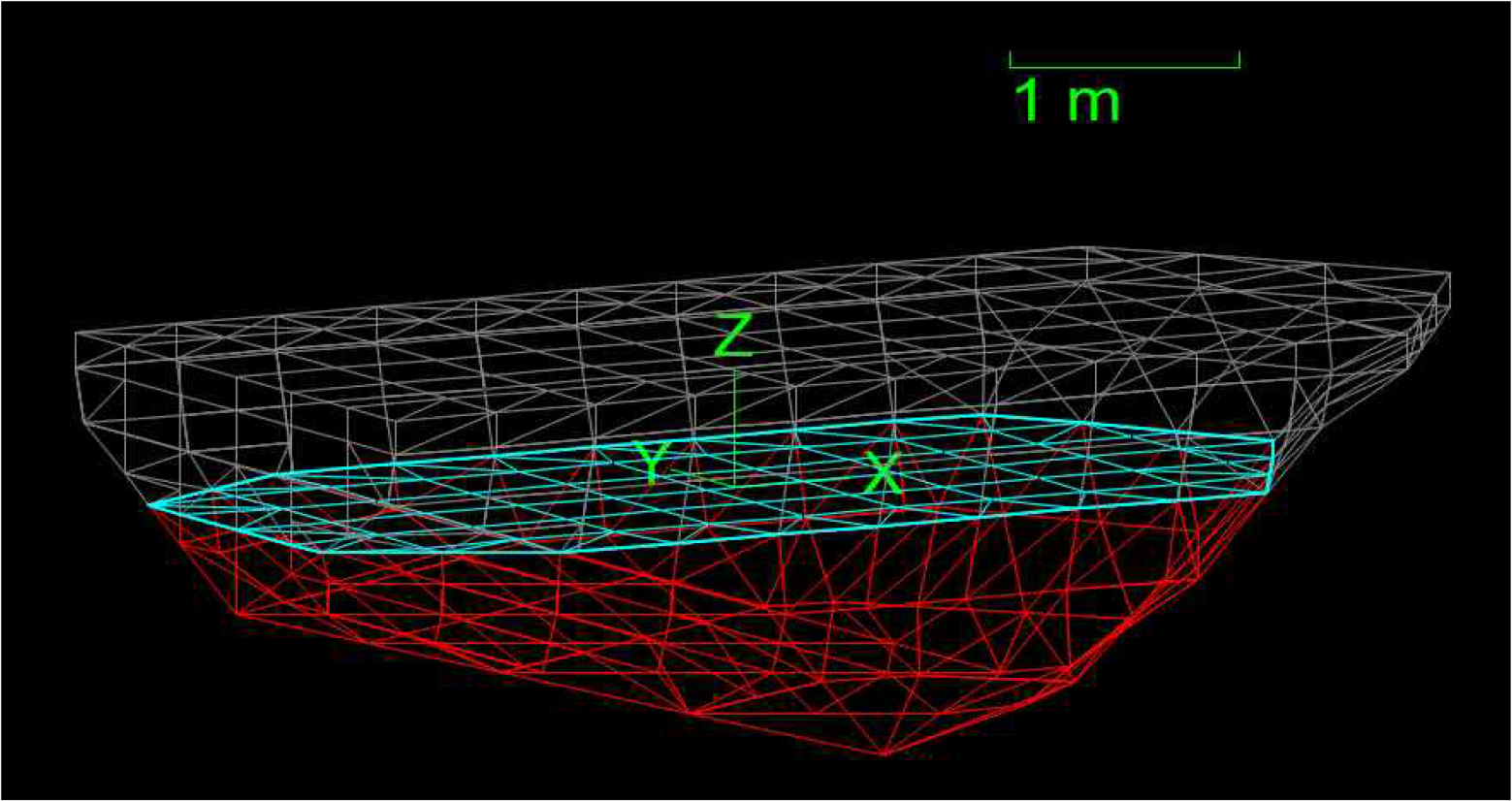
OrcaWaveм—җм„ң мӮ¬мҡ©лҗң 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ нҳ•мғҒмқҖ Fig. 7м—җм„ң нҷ•мқён• мҲҳ мһҲлӢӨ. ліҙмҲҳм Ғмқё кҙҖм җм—җм„ң нҸүк°ҖлҘј 진н–үн•ҳкё° мң„н•ҙ нҷҳкІҪ н•ҳмӨ‘мқҳ л°©н–Ҙмқ„ 180лҸ„лЎң к°ҷкІҢ м„Өм •н•ҳмҳҖкі 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙм—җ лҢҖн•ң RAO кІ°кіјм№ҳлҠ” Fig. 8кіј к°ҷмқҙ лӮҳнғҖлӮ¬лӢӨ. ліҙлӢӨ мӢ лў°м„ұмқ„ к°Җм§Җкё° мң„н•ҙм„ңлҠ” мҲҳмЎ°лӘЁнҳ•мӢӨн—ҳкіј к°ҷмқҖ 추к°Җм Ғмқё мӢӨн—ҳмқҙ н•„мҡ”н•ҳл©° мқҙлҹ¬н•ң м—°кө¬лҠ” 추нӣ„ м—°кө¬ мҲҳн–ү мӢң кІҖмҰқн• мҳҲм •мқҙлӢӨ.
2.3.3 OrcaFlex : мӢңк°„ мҳҒм—ӯ лҸҷм Ғ мҡҙлҸҷ л°Ҹ кі„лҘҳн•ҙм„қ
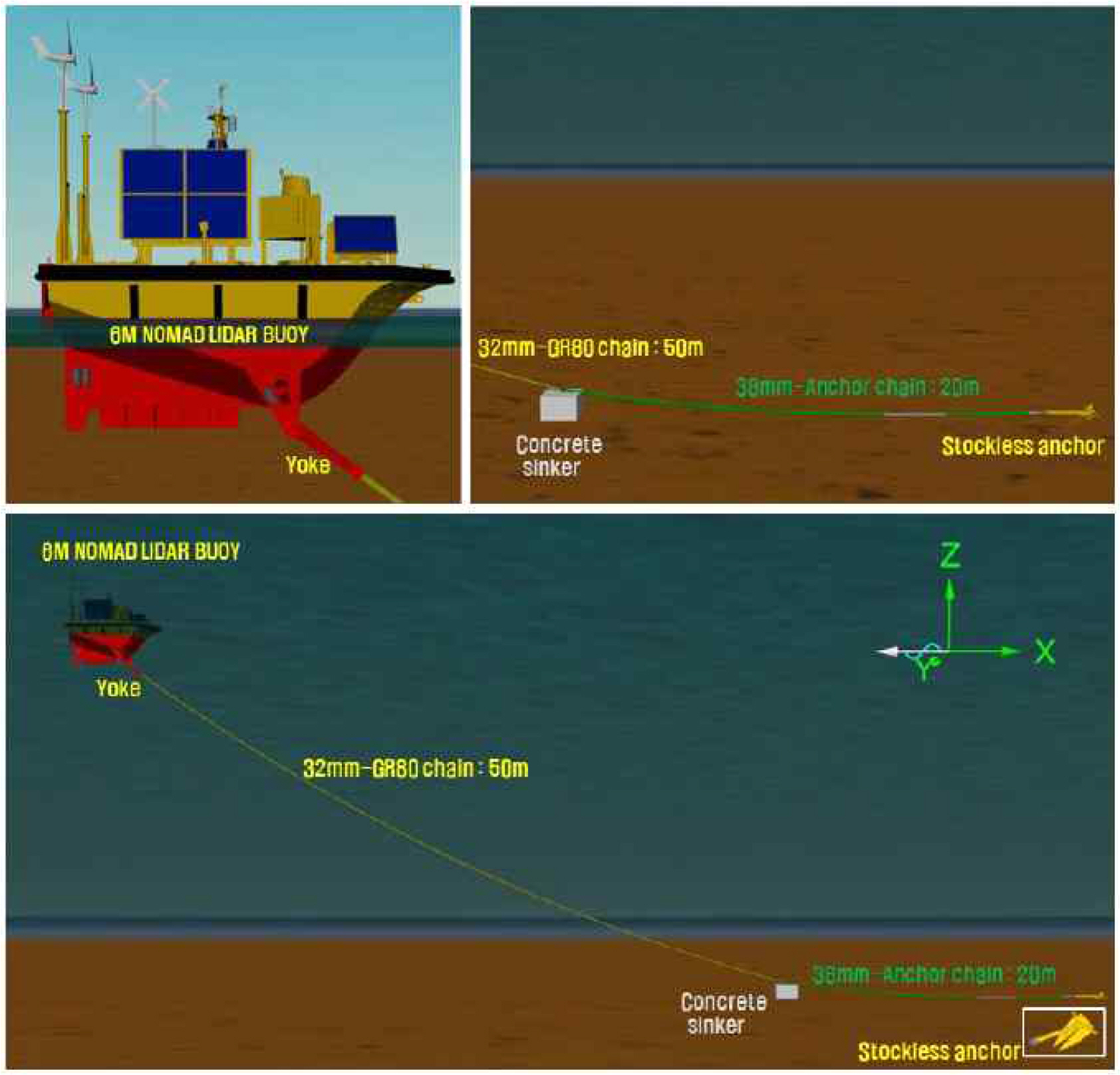
6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙ кі„лҘҳн•ҙм„қмқ„ мң„н•ң OrcaFlex лӘЁлҚёмқҖ Fig. 9м—җм„ң ліҙм—¬мӨҖ м№ҳмҲҳлҘј мқҙмҡ©н•ҳм—¬ лӘЁлҚёл§Ғн•ҳмҳҖлӢӨ. м„ мІҙ, мҡ”нҒ¬(Yoke), кі„лҘҳ мІҙмқё, мҪҳнҒ¬лҰ¬нҠё мӢұм»Ө(Sinker), мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө(Stockless Anchor)лҘј лӘЁл‘җ нҸ¬н•Ён•ҳмҳҖлӢӨ. 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶ҖмқҙлҠ” к°•м„ұ, л¶Җк°Җм§Ҳлҹү л°Ҹ к°җмҮ лҝҗл§Ң м•„лӢҲлқј ліҖмң„ л°Ҹ н•ҳмӨ‘ RAOлҘј к°Җм§ҖлҠ” м„ л°•(Vessel)мңјлЎң лӘЁлҚёл§Ғн•ҳмҳҖлӢӨ.
мҡ”нҒ¬(Yoke)лҠ” OrcaFlexмқҳ 6D buoyлҘј мӮ¬мҡ©н•ҳм—¬ нһҢм§Җ нҳ•нғң(Hinge type)лЎң л¶Җмқҙ н•ҳлӢЁл¶Җм—җ м—°кІ°н•ҳмҳҖлӢӨ. кі„лҘҳ мІҙмқё(GR80 мІҙмқё 50m л°Ҹ м•өм»Ө мІҙмқё 20m)мқҖ к°Ғк°Ғ OrcaFlexмқҳ LinesлҘј мӮ¬мҡ©н•ҳм—¬ лӘЁлҚёл§Ғн•ҳмҳҖмңјл©°, көҪнһҳмқҙлӮҳ 비нӢҖлҰј к°•м„ұмқҙ м—ҶлӢӨкі к°Җм •н•ҳмҳҖлӢӨ. мӢұм»Ө(Sinker)лҠ” GR80 5,000kgf мҪҳнҒ¬лҰ¬нҠё лё”лЎқ(1.5mx1.5mx1.0m)мңјлЎң OrcaFlexмқҳ 3D buoyлҘј мӮ¬мҡ©н•ҳм—¬ лӘЁлҚёл§Ғн•ҳмҳҖмңјл©°, мІҙмқё(Гё32mm, 50m)кіј м•өм»ӨмІҙмқё(Гё38mm, 20m) мӮ¬мқҙм—җ м—°кІ°лҗҳлҸ„лЎқ н•ҳмҳҖлӢӨ. н•ҙм Җл©ҙмқҖ мҲҳмӢ¬ 25mлЎң нҸүнҸүн•ң кІғмңјлЎң к°Җм •н•ҳмҳҖлӢӨ. мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө(Stockless Anchor)лҠ” м•өм»Ө мІҙмқё лҒқлӢЁм—җ м—°кІ°н•ҳмҳҖмңјл©° мӢӨм ң мӢң뮬л Ҳмқҙм…ҳмқ„ мң„н•ң кі„мӮ°м—җлҠ” нҸ¬н•Ён•ҳм§Җ м•Ҡм•ҳлӢӨ.
Fig. 10мқҖ OrcaFlexм—җм„ң лӘЁлҚёл§Ғлҗң 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ кі„лҘҳ мӢңмҠӨн…ңмқ„ ліҙм—¬мӨҖлӢӨ. мҲҳмӢ¬ 25mм—җм„ң мқјм җ кі„лҘҳ мӢңмҠӨн…ң(Single point mooring system)мңјлЎң кө¬м„ұлҗҳлҸ„лЎқ н•ҳмҳҖмңјл©°, нҷҳкІҪмЎ°кұҙ(нҢҢлҸ„, л°”лһҢ, мЎ°лҘҳ)мқҳ мһ…мӮ¬ л°©н–ҘлҸ„ н•Ёк»ҳ ліҙм—¬мӨҖлӢӨ.
2.4 м„Өкі„ мЎ°кұҙ
н’ҚмҶҚ л°Ҹ м„Өкі„нҢҢ мӮ°м •мқҖ л¶Җмқҙмқҳ кі„лҘҳлқјмқё м„Өкі„м—җ нҒ° мҳҒн–Ҙмқ„ лҜём№ҳкё° л•Ңл¬ём—җ мқјл°ҳм ҒмңјлЎң 50л…„ лҳҗлҠ” 100л…„мқҳ мһ¬нҳ„мЈјкё°лҘј к°–лҠ” к·№н•ң мЎ°кұҙмңјлЎң мӮ°м •н•ңлӢӨ. мқҙлҸҷмӢқ н•ҙм–‘кө¬мЎ°л¬ј к·ңм№ҷ(KR : н•ңкөӯм„ кёү л°ңк°„, 2021)м—җм„ңлҸ„ 50л…„мқҳ мЈјкё° лӮҙм—җм„ң мҳҲмғҒлҗҳлҠ” к°ҖмһҘ к°Җнҳ№н•ң мЎ°кұҙм—җ кё°мҙҲн•ҳлҸ„лЎқ лӘ…кё°н•ҳкі мһҲлӢӨ.
ліё н•ҙм„қм—җм„ңлҠ” м „көӯ мӢ¬н•ҙм„Өкі„нҢҢ мӮ°м¶ңліҙкі м„ң (н•ҙм–‘мҲҳмӮ°л¶Җ, 2019)мқҳ мһҗлЈҢлҘј нҶ лҢҖлЎң л¶Җмқҙмқҳ м„Өм№ҳ н•ҙм—ӯмқҳ 50л…„ мһ¬нҳ„мЈјкё° нҷҳкІҪмЎ°кұҙмқ„ м Ғмҡ©н•ҳмҳҖмңјл©°, м Ғмҡ©лҗң нҷҳкІҪм„Өкі„ кё°мӨҖ(н’ҚмҶҚ, нҢҢкі /мЈјкё°)мқҖ Table 4мҷҖ к°ҷлӢӨ.
н•ңнҺё, м„Өм№ҳнҳ„мһҘмқҳ мҲҳмӢ¬кіј мөңлҢҖ мЎ°лҘҳ мң мҶҚмқҖ кө°мӮ°н•ӯмқҳ лҚ°мқҙн„°лҘј м°ёкі н•ҳм—¬ лӢӨмқҢкіј к°ҷмқҙ м Ғмҡ©н•ҳмҳҖлӢӨ. (н•ҙм–‘мҲҳмӮ°л¶Җ, 2022)
в—Ҹ мҲҳмӢ¬ : 25.0m
в—Ҹ мөңлҢҖ мЎ°лҘҳ мң мҶҚ : 1.24m/s (2.4knots), н•ҙмҲҳл©ҙ кё°мӨҖ
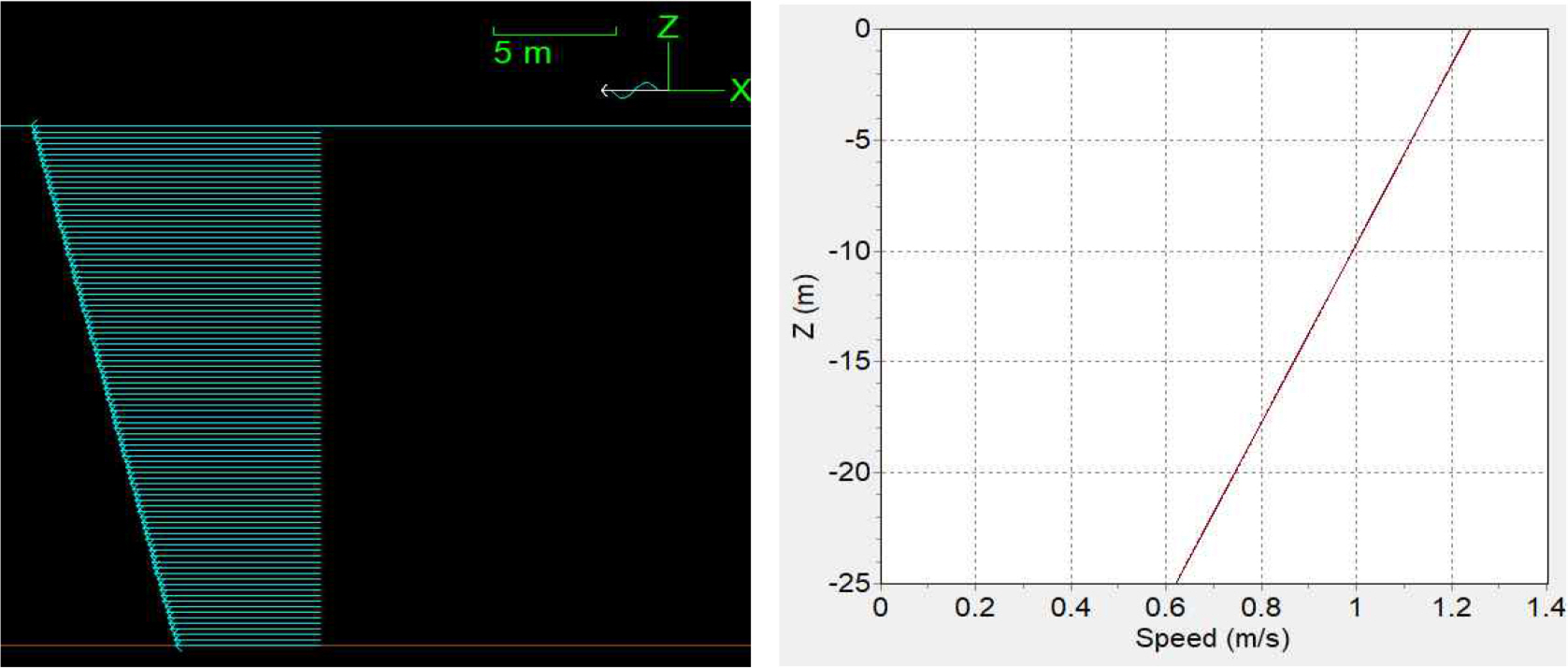
мҲҳмӢ¬лі„ мЎ°лҘҳ мң мҶҚмқҖ Fig. 11м—җм„ңмҷҖ к°ҷмқҙ м Ғмҡ©н•ҳмҳҖлӢӨ. н•ҙмҲҳл©ҙм—җм„ңмқҳ мң мҶҚмқҙ м ңмқј л№ лҘҙлҜҖлЎң 1.24m/sлЎң м Ғмҡ©н•ҳмҳҖкі , н•ҙм Җл©ҙм—җм„ңлҠ” л§Ҳм°°лЎң мқён•ң к°җмҶҚмқҙ лӮҳнғҖлӮҳлҜҖлЎң 0.62m/sлЎң м Ғмҡ©н•ҳмҳҖлӢӨ.
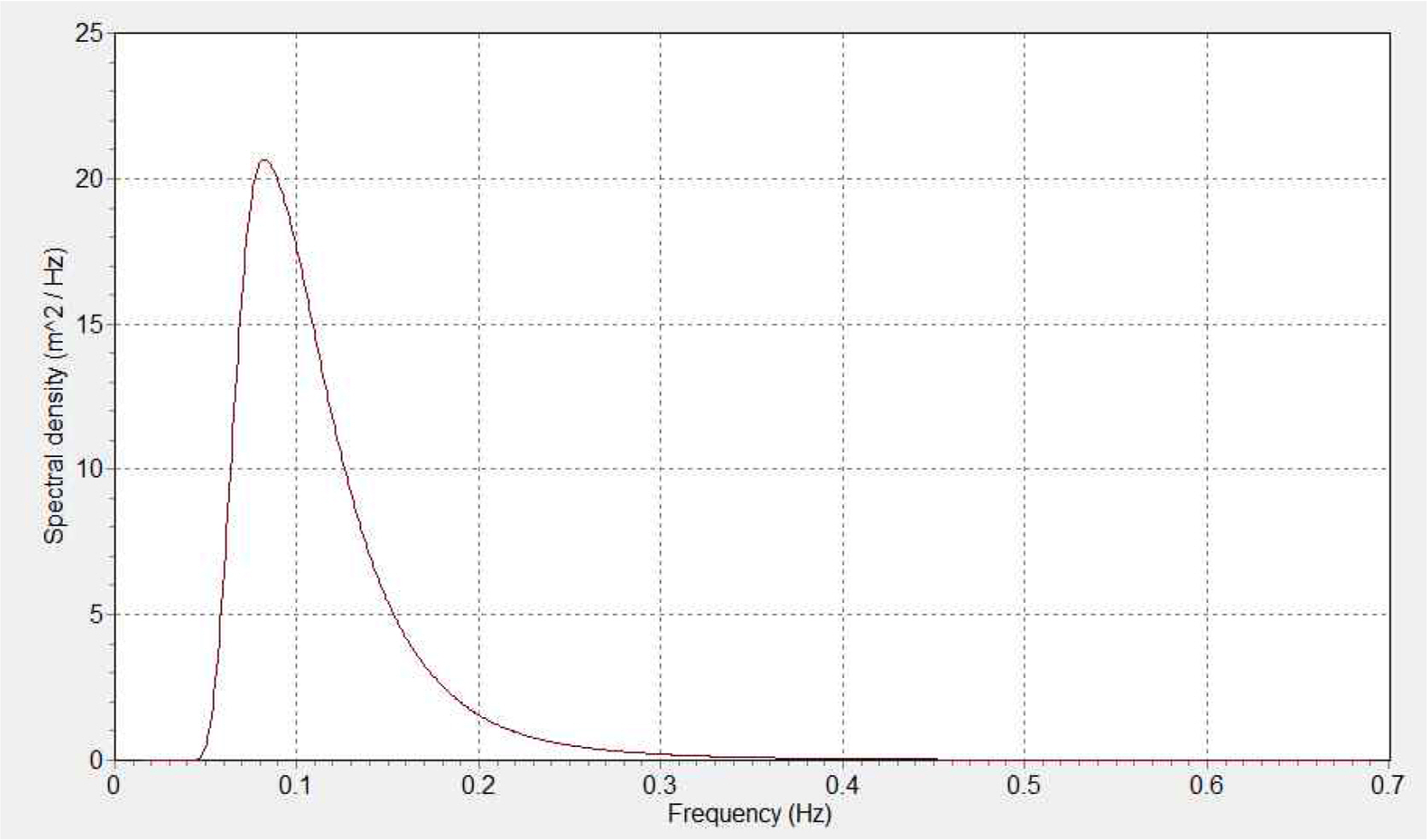
м„Өм№ҳлҗҳлҠ” н•ҙм—ӯмқҳ мҲҳмӢ¬мқҖ 25mлЎң м–•мқҖ мҲҳмӢ¬мқҙкё° л•Ңл¬ём—җ м„Өм№ҳ мҲҳмӢ¬мқ„ кі л Өн•ҙ TMA мҠӨнҺҷнҠёлҹјмқ„ м Ғмҡ©н•ҳм—¬ л¶Ҳк·ңм№ҷ нҢҢлһ‘ мЎ°кұҙмқ„ л¶Җм—¬н•ҳмҳҖлӢӨ. м Ғмҡ©лҗң TMA мҠӨнҺҷнҠёлҹј нҳ•мғҒмқҖ Fig. 12м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷлӢӨ. 추к°ҖлЎң ліё л¶ҖмқҙлҠ” мқјм җкі„лҘҳл°©мӢқмқ„ м Ғмҡ©н•ҳкё° л•Ңл¬ём—җ нҢҢн–Ҙм—җ лҢҖн•ҙм„ң Weather Vaning(м„ л°•мқҙлӮҳ л¶Җмң кө¬мЎ°л¬јмқҙ л°”лһҢ, мЎ°лҘҳ лҳҗлҠ” нҢҢлһ‘мқҳ мһ‘мҡ© л°©н–ҘмңјлЎң м„ мҲҳк°Җ н–Ҙн•ҳлҸ„лЎқ м„ нҡҢн•ҳлҠ” мӣҖм§Ғмһ„)н•ҳлҜҖлЎң нҢҢн–Ҙлі„ кі л ӨлҠ” л¶Ҳн•„мҡ”н•ҳлӢӨ.
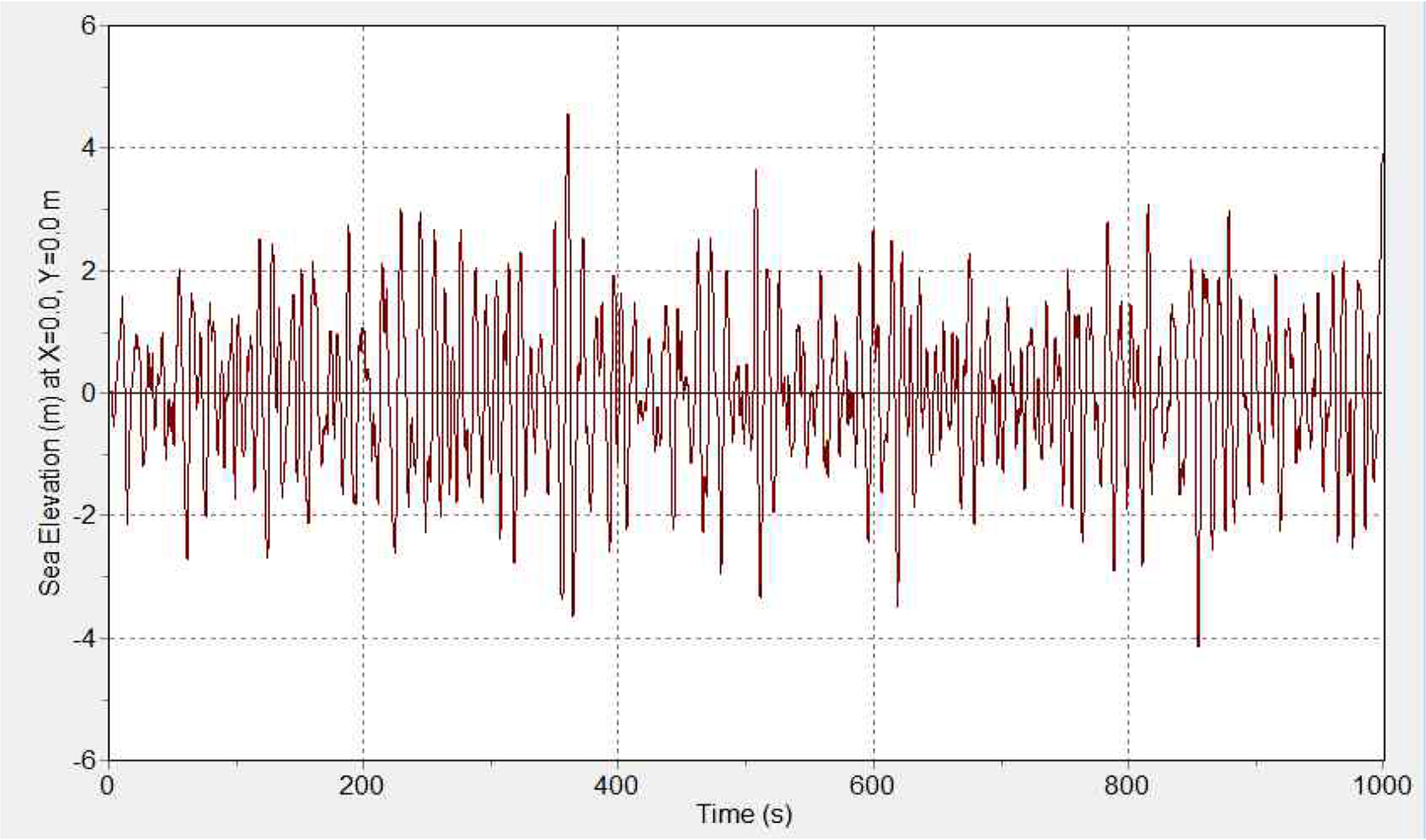
лқјмқҙлӢӨ мӢңмҠӨн…ңм—җ м Ғмҡ©лҗң кі„лҘҳлқјмқём—җ мөңлҢҖмқҳ мһҘл Ҙмқ„ м Ғмҡ©н•ҳкё° мң„н•ҙм„ң л°”лһҢ, нҢҢлһ‘ л°Ҹ мЎ°лҘҳмқҳ л°©н–Ҙмқ„ к°ҷмқҖ л°©н–ҘмңјлЎң м Ғмҡ©н•ҳмҳҖлӢӨ. мӢң뮬л Ҳмқҙм…ҳмқҳ нҷҳкІҪмЎ°кұҙмқҖ м•һм—җм„ң м–ёкёүн•ң м„Өкі„кё°мӨҖмқ„ мӮ¬мҡ©н•ҳмҳҖмңјл©°, л¶Ҳк·ңм№ҷ нҢҢлҘј лҢҖмғҒмңјлЎң 1,000мҙҲ лҸҷм•Ҳ мӢӨн–үн•ҳмҳҖлӢӨ. OrcaFlexм—җм„ң мӮ¬мҡ©мһҗ м •мқҳмқҳ л¶Ҳк·ңм№ҷ нҢҢлЎңм„ң TMA мҠӨнҺҷнҠёлҹјм—җ мқҳн•ң мһ…мӮ¬нҢҢ мӢңкі„м—ҙмқҖ Fig. 13м—җ лӮҳнғҖлӮҙм—ҲлӢӨ.
ліё н•ҙм„қм—җ м Ғмҡ©лҗң кіөкё° л°Ҹ н•ҙмҲҳмқҳ нҠ№м„ұмқҖ лӢӨмқҢкіј к°ҷлӢӨ.
в—Ҹ Air Density = 0.128kg/m3
в—Ҹ Air Kinematic Viscosity = 15 Г— 10-6m2/s
в—Ҹ Sea Water Temperature = 10В°C
в—Ҹ Sea Water Density = 1.025kg/m3
в—Ҹ Sea Water Kinematic Viscosity = 1.35 Г— 10-6m2/s
2.5 н•ҙм„қ кІ°кіј
2.5.1 кі„лҘҳлқјмқём—җ лҢҖн•ң н•ҙм„қ кІ°кіј
лқјмқҙлӢӨ мӢңмҠӨн…ңмқ„ к·№н•ңнҷҳкІҪм—җм„ң мқјм җкі„лҘҳл°©мӢқмңјлЎң м„Өм№ҳн•ҳмҳҖмқ„ л•Ң 충분н•ң к°•лҸ„лҘј к°Җм§Ҳ мҲҳ мһҲлҠ”м§Җм—җ лҢҖн•ҙ кі„лҘҳн•ҙм„қмқ„ мӢӨмӢңн•ҳмҳҖлӢӨ. ліҙмҲҳм Ғмқё н•ҙм„қмқ„ мң„н•ҳм—¬ 50л…„ мһ¬нҳ„мЈјкё°мқҳ л°”лһҢ, мЎ°лҘҳ, нҢҢлһ‘м—җ лҢҖн•ң мһ‘мҡ© л°©н–Ҙмқ„ к°ҷмқҖ л°©н–ҘмңјлЎң к°Җм •н•ҳмҳҖлӢӨ.
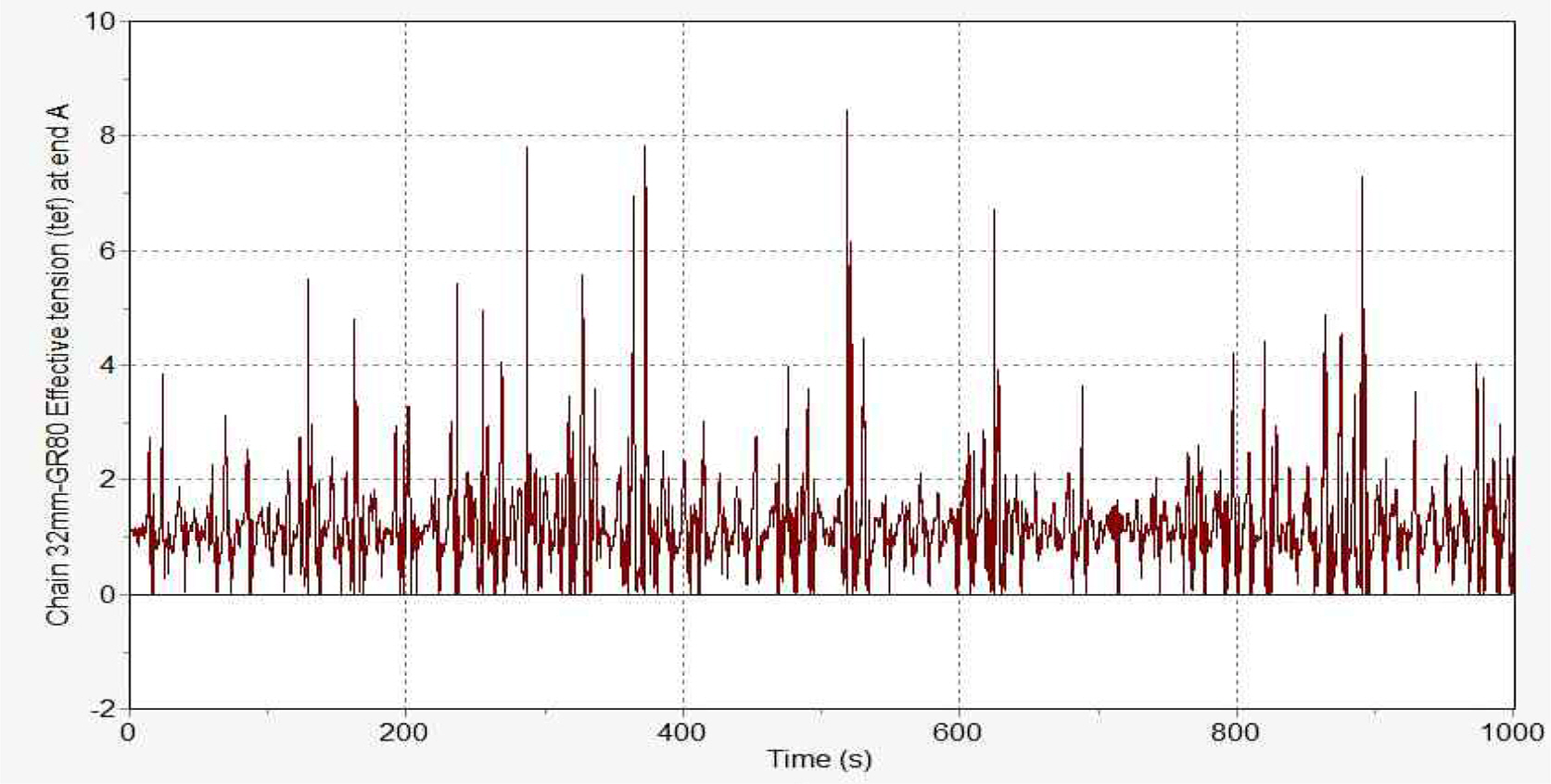
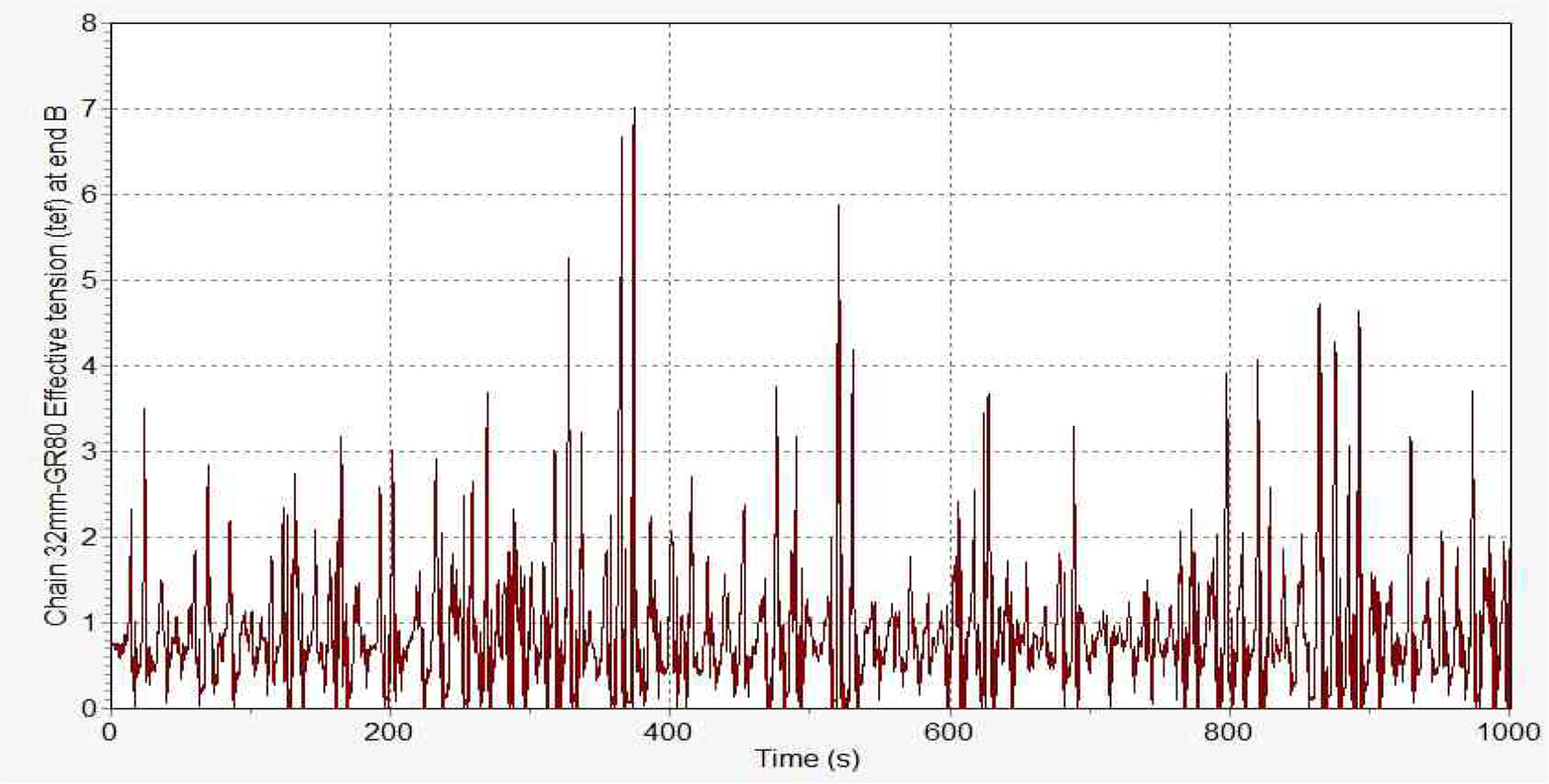
25mмқҳ м–•мқҖ мҲҳмӢ¬мқҙкё° л•Ңл¬ём—җ кі„лҘҳлқјмқёмқҖ 1 1/4вҖқ(32mm) GR80 лӢЁмқјмІҙмқёмңјлЎң м„Өкі„н•ҳмҳҖмңјл©° кі„лҘҳн•ҙм„қмқ„ н•ң кІ°кіј л¶Җмқҙ м—°кІ°м§Җм җ(End-A)кіј мҪҳнҒ¬лҰ¬нҠё мӢұм»Ө м—°кІ°м§Җм җ(End-B)м—җм„ң мһҘл Ҙмқҙ к°Ғк°Ғ Fig. 14, 15мҷҖ к°ҷмқҙ лӮҳнғҖлӮ¬лӢӨ. кі„лҘҳлқјмқём—җ л°ңмғқн•ҳлҠ” мөңлҢҖ мһҘл ҘмқҖ л¶Җмқҙ м—°кІ°м§Җм җм—җм„ң л°ңмғқн•ң 8.44tefлЎң 1 1/4вҖқ(32mm) GR80 мІҙмқёмқҳ м•Ҳм „н•ҳмӨ‘(31.50tef) мқҙлӮҙлЎң лӮҳнғҖлӮ¬лӢӨ.
2.5.2 м•өм»Өл§Ғм—җ лҢҖн•ң нҸүк°Җ
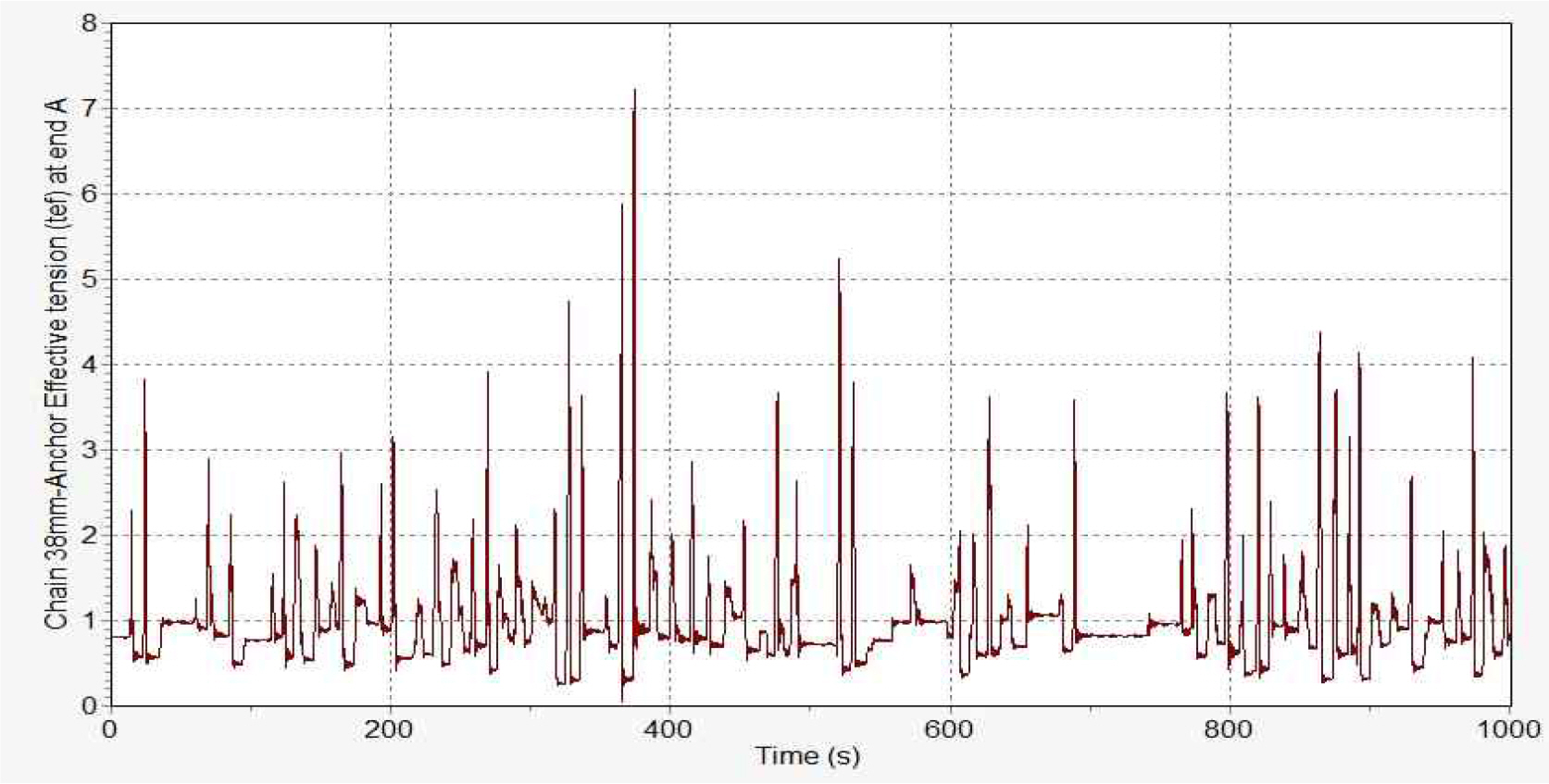
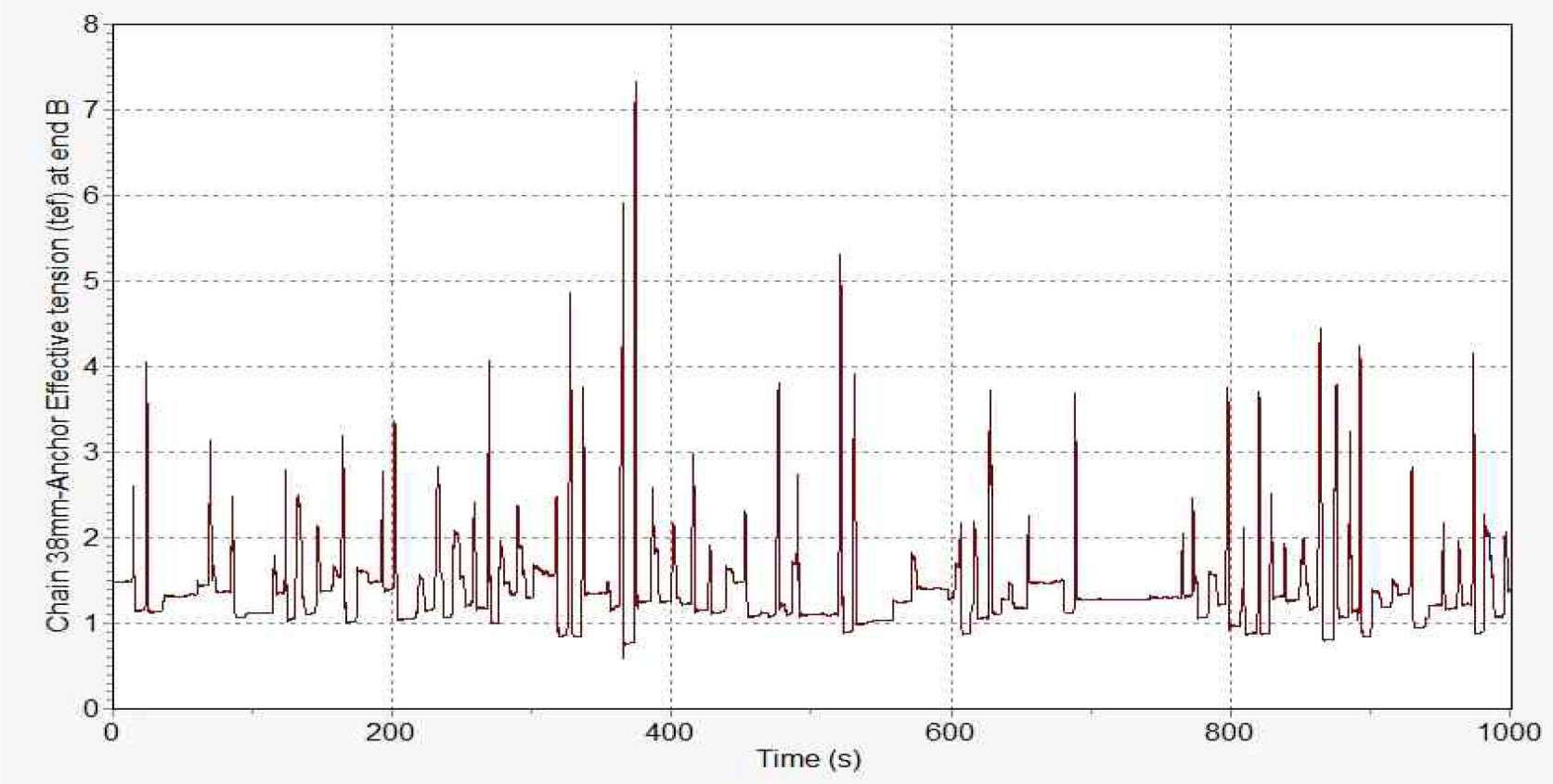
лқјмқҙлӢӨ мӢңмҠӨн…ңмқҳ мң„м№ҳ мң м§ҖлҘј мң„н•ҙм„ң 5.0tef мҪҳнҒ¬лҰ¬нҠё мӢұм»Ө(Sinker)мҷҖ 0.9tef мқҳ мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө(Stockless Anchor)лҘј мӮ¬мҡ©н•ҳмҳҖкі мӢұм»ӨмҷҖ м•өм»Ө мӮ¬мқҙм—җлҠ” 1 1/2вҖқ(38mm) м•өм»Ө мІҙмқёмңјлЎң м—°кІ°н•ҳмҳҖлӢӨ.
м•өм»Ө мІҙмқёмқҳ мҪҳнҒ¬лҰ¬нҠё мӢұм»Ө м—°кІ°м§Җм җ(End-A)кіј мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө м—°кІ°м§Җм җ(End-B)м—җ л°ңмғқн•ң мһҘл Ҙмқҳ нҒ¬кё°лҠ” Fig. 16, 17кіј к°ҷлӢӨ. м•өм»Ө мІҙмқём—җ л°ңн–үн•ҳлҠ” мөңлҢҖ мһҘл ҘмқҖ мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө м—°кІ°м§Җм җм—җм„ң л°ңмғқн•ң 7.33tefлЎң м•өм»Ө мІҙмқёмқҳ м•Ҳм „н•ҳмӨ‘мқё 29.60tef мқҙлӮҙлЎң лӮҳнғҖлӮҳлҠ” кІғмқ„ м•Ң мҲҳ мһҲлӢӨ.
лқјмқҙлӢӨ мӢңмҠӨн…ңмқҳ мЈјл¬ҳ нҳ„мғҒмқ„ л°©м§Җн•ҳкё° мң„н•ҙм„ң м•өм»Өм җм—җм„ң л°ңмғқн•ҳлҠ” мҲҳм§Ғ н•ҳмӨ‘мқ„ мғҒмҮ„н•ҳкё° мң„н•ҙ мҪҳнҒ¬лҰ¬нҠё мӢұм»ӨлҘј мӮ¬мҡ©н•ҳмҳҖмңјл©° мҠӨнҶЎлҰ¬мҠӨ м•өм»ӨлҘј нҶөн•ҙ мҲҳнҸү нҢҢм§Җл Ҙмқ„ нҷ•ліҙн• мҲҳ мһҲлҸ„лЎқ м„Өкі„н•ҳмҳҖлӢӨ.
Fig. 18 к·ёлһҳн”„лҠ” нҷҳкІҪ н•ҳмӨ‘м—җ лҢҖн•ҙ кі„лҘҳлқјмқёмқҳ нҳ•мғҒмқ„ мөңлҢҖ, нҸүк· , мөңмҶҢ 3к°Җм§ҖлЎң лӮҳнғҖлӮё кІғмңјлЎң кі„лҘҳлқјмқёмқҙ мөңлҢҖлЎң мқҙм¶ң лҗ л•ҢлҸ„ мҪҳнҒ¬лҰ¬нҠё мӢұм»ӨмҷҖ м—°кІ°лҗң м§Җм җмқҳ мҲҳм§Ғ мң„м№ҳліҖнҷ”к°Җ м—Ҷмқҙ к°ҷмқҖ кІғмңјлЎң лӮҳнғҖлӮҳ 충분нһҲ мҲҳм§Ғ мһҘл Ҙм—җ м Җн•ӯн• мҲҳ мһҲлҠ” кІғмқ„ м•Ң мҲҳ мһҲлӢӨ.
мҠӨнҶЎлҰ¬мҠӨ м•өм»ӨмҷҖмқҳ м—°кІ°м§Җм җм—җм„ң л°ңмғқн•ҳлҠ” мөңлҢҖ мһҘл Ҙмқҳ нҒ¬кё°лҠ” 7.330tefлЎң лӮҳнғҖлӮ¬мңјл©° 0.9tef мҠӨнҶЎлҰ¬мҠӨ м•өм»Ө (м•Ҫ 2 kips, 35В° Fluke Angle)к°Җ к°Җм§ҖлҠ” нҢҢм§Җл ҘмқҖ м•Ҫ 8.61tef (19 kips) м •лҸ„лЎң 충분н•ң нҢҢм§Җл Ҙмқ„ к°Җм§ҖлҠ” кІғмңјлЎң лӮҳнғҖлӮ¬лӢӨ. (API RP 2FP1, 1993)
3. кІ° лЎ
н”ҢлЎңнҢ… лқјмқҙлӢӨ л¶ҖмқҙлҘј м„Өм№ҳн•ҳлҠ” лӘ©м ҒмқҖ н’Қнҷ©мЎ°мӮ¬мқҙлӢӨ. к·ёлҹ¬лӮҳ мҳҲкё°м№ҳ лӘ»н•ң кё°мғҒ нҷҳкІҪ л•Ңл¬ём—җ л¶Җмқҙк°Җ мң„м№ҳлҘј мқҙнғҲн•ҳкІҢ лҗҳл©ҙ, мқҙнғҲн•ң кё°к°„ лҸҷм•Ҳ мҲҳ집н•ҳм§Җ лӘ»н•ң мһҗлЈҢ ліөкө¬лҘј мң„н•ҙ мӢңк°„кіј 비мҡ©мқҙ л§Һмқҙ мҶҢмҡ”лҗңлӢӨ. мқҙлҘј мөңмҶҢнҷ”н•ҳкё° мң„н•ҙ л¶Җмқҙ кі„лҘҳ мӢңмҠӨн…ңмқ„ м„Өкі„н• л•Ң к·№н•ңнҷҳкІҪ мЎ°кұҙм—җм„ң лҢҖмІҳн• мҲҳ мһҲм–ҙм•ј н•ҳкі мқјм •н•ң кі„лҘҳ мң„м№ҳлҘј мң м§Җн• мҲҳ мһҲм–ҙм•ј н•ңлӢӨ.
ліҙмҲҳм Ғмқё мһ…мһҘм—җм„ң н•ҙм„қмқ„ л°”лқјліҙкё° мң„н•ҙ, м Ғм–ҙлҸ„ 50л…„мқҳ мЈјкё° лӮҙм—җм„ң мҳҲмғҒлҗҳлҠ” к°ҖмһҘ к°Җнҳ№н•ң мЎ°кұҙм—җ кё°мҙҲн•ҳм—¬ н•ҙм„қмқ„ 진н–үн•ҳмҳҖлӢӨ. 50л…„ мЈјкё°лЎң н•ҙм„қмқ„ мҲҳн–үн•ң кІ°кіј, 6m м„ л°•нҳ• лқјмқҙлӢӨ л¶Җмқҙмқҳ кі„лҘҳ мӢңмҠӨн…ңмқҙ мң„м№ҳлҘј мң м§Җн•ҳкё° мң„н•ң 충분н•ң к°•лҸ„лҘј к°Җм§ҖлҠ” кІғмқ„ ліј мҲҳ мһҲм—ҲлӢӨ. мқҙлҹ¬н•ң кІ°кіјлҘј нҶөн•ҙм„ң м„ңн•ҙм•Ҳмқҳ нҷҳкІҪмЎ°кұҙм—җм„ңлҸ„ лқјмқҙлӢӨ мӢңмҠӨн…ңмқҙ м•Ҳм •м ҒмңјлЎң мҡҙмҳҒлҗ кІғмқҙлқјкі мҳҲмғҒн• мҲҳ мһҲлӢӨ.
кё°мғҒмІӯм—җм„ң мҡҙмҳҒн•ҳлҠ” м„ л°•нҳ• 6m NOMAD MetOcean л¶Җмқҙ лҳҗн•ң 6m NOMAD лқјмқҙлӢӨ л¶ҖмқҙмҷҖ мҷёнҳ•мқҙ л§Өмҡ° мң мӮ¬н•ҳл©°, 6m NOMAD MetOcean л¶ҖмқҙлҠ” лҸҷн•ҙмҷҖ лӮЁн•ҙ л“ұ н•ҙм—ӯм—җм„ң мЈјлЎң мҡҙмҳҒлҗҳкі мһҲлӢӨ. ліё н•ҙм„қмқ„ нҶөн•ҳм—¬ м„ л°•нҳ• 6m NOMAD л¶ҖмқҙлҘј м„ңн•ҙм•Ҳм—җм„ң мҡҙмҳҒн•ҳлҠ” лҚ°м—җлҸ„ л¬ём ңк°Җ м—ҶлҠ” кІғмқҙ 충분нһҲ мһ…мҰқлҗҳм—Ҳмңјл©°, мӢӨм ң кҙҖмёЎмқ„ нҶөн•ҳм—¬ мӢң뮬л Ҳмқҙм…ҳ кІ°кіјлҘј мһ¬нҸүк°Җн• кі„нҡҚмқҙлӢӨ. нҳ„мһ¬ н•ҙлӢ№ мһҘ비лҠ” мӢң뮬л Ҳмқҙм…ҳ лҢҖмғҒ н•ҙм—ӯм—җ мӢӨм ң м„Өм№ҳлҗҳм—Ҳмңјл©°, м•һмңјлЎң 6к°ңмӣ” мқҙмғҒ мҡҙмҳҒн•ҳл©ҙм„ң кё°мғҒм—җ л”°лҘё лӘЁм…ҳмқҳ ліҖнҷ”лҹү л“ұмқ„ кҙҖмёЎн• мҳҲм •мқҙкі , н•ҙлӢ№ мҳҒн–ҘнҸүк°ҖмҷҖ м•„мҡёлҹ¬ мӢӨн—ҳ лҚ°мқҙн„°лҘј нҶ лҢҖлЎң н•ҙмҲҳ м „м§ҖлҘј нғ‘мһ¬н•ң мғҲлЎңмҡҙ нҳ•нғңмқҳ лқјмқҙлӢӨ л¶ҖмқҙлҘј к°ңл°ңн•ҳлҠ” кё°мҙҲмһҗлЈҢлЎң нҷңмҡ©н•ҳкі мһҗ н•ңлӢӨ.


 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






