


1. Introduction
Discussion on the development and operation of MASS(Maritime Autonomous Surface Ship) have been actively conducted in the maritime industry including a multiple shipbuilding companies, universities and institutes recently. The IMO Maritime Safety Committee(MSC), at its 98th session, had defined MASS as “Maritime Autonomous Surface Ship(MASS) is defined as a ship which, to a varying degree, can operate independent of human interaction” in order to performing RSE(Regulatory Scoping Exercise), and it was divided into four stage(IMO, 2018).
In other words, MASS automatically collect and manage necessary information for the purpose and mission of the ships, and based on this, they can decide and operate their own routes or operate through a system called remote control. According to the steps which defined by IMO, the concept of a seaman on board a ship will gradually disappear and change to the form of remote operators managing and operating the ships, but to achieve this, the issues and development of technical and human factors will still have to be made. In addition, for autonomous or remote operation, a consideration of the technology to be additionally applied to the traditional merchant ship system should be conducted. Recently, the UK has been developing practical guidelines for remote-controlled unmanned aerial vehicles (ROUVs), particularly explaining the possibility that dynamic positioning systems will be newly considered to apply remote and autonomous operations (IMO, 2022).
With this trend, it will be consider to examine the factors applicable to MASS among the control system elements of the dynamic positioning system in this paper. Therefore, Chapter 2 describes the components and basic overview of the dynamic positioning system, and Chapter 3 describes the overview discussed in MASS and the stages of development steps that are underway worldwide. And next, Chapter 4 describes the various functions and elements of the dynamic positioning system that can be applied to MASS in any of the ways.
2. Basic Overview and Components of Dynamic positioning system
The dynamic positioning system is a technology which developed for various types of ships to maintain their position and heading for various purposes at sea, especially in the field of offshore plant, or to automatically follow predetermined route and track(IMO, 1994). The IMO MSC Circular 645 describes the dynamic positioning system as “a device that uses computers, position reference system and thruster to accurately maintain its position and heading of the ship within a preset limit’. Compared with conventional mooring, DP system can give the vessel more efficient controlling and functions. For example, when work was completed on one side it could move very quickly under DP control to the next side, without the time consuming exercise of recovering and relaying anchor.
Looking at the history of the development of the dynamic positioning system, the system was first devised through the Mohole project in the United States in 1957. The purpose of this project to drill into the so-called Moho layer, that is, through the outer shell of the earth. To succeed in this, the drilling was to be done where this shell is at the thinnest, and that was where the great oceans are at the deepest(Dynamic Positioning Induction Manual, 2015). In order to perform the project successfully, a ship had to maintain its position and heading without more movement during the period of drilling, and thus a DP system was developed to operate a system automatically promoted and developed by the system. From being designed for offshore drilling and producing, DP system is now being used for different types of operations, ranging from geological assignments, via military ones, to cruise ship maneuvering and to construct offshore wind farm.
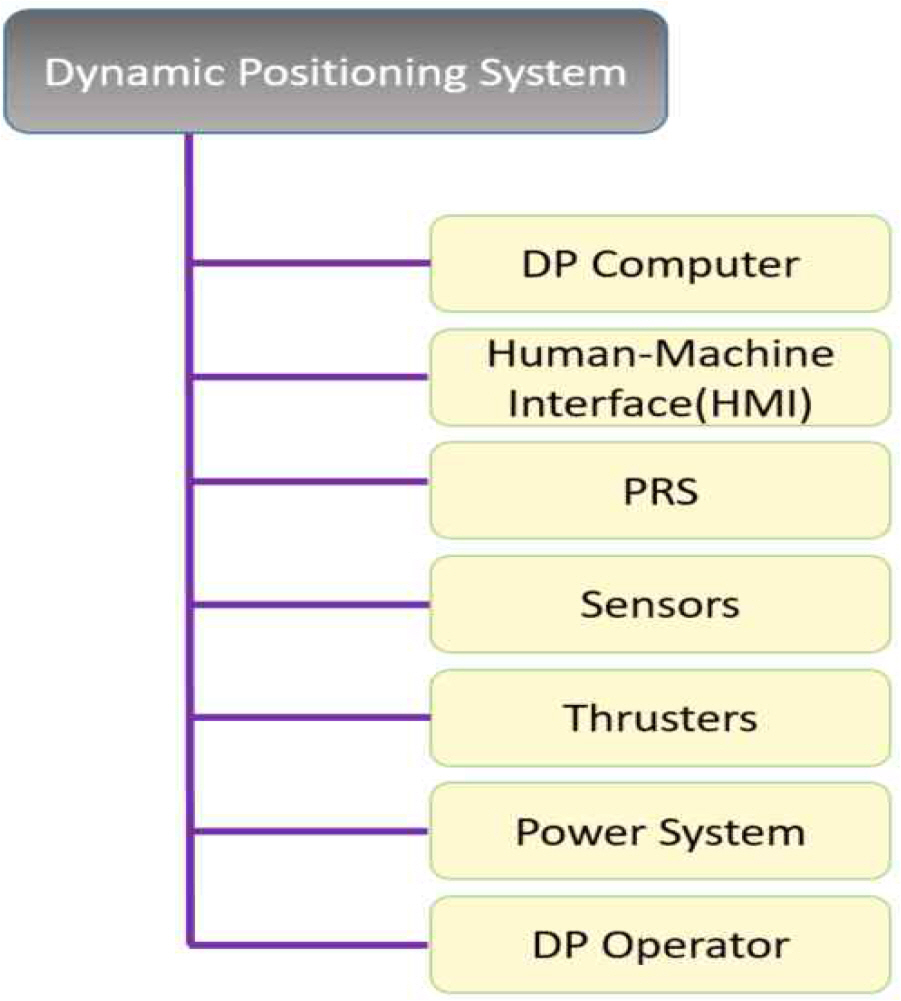
A dynamic positioning system is consist of main 7 components each of which is vital to the operation in Fig.1.
DP computer is a component of DP system according to the definition, that is generating set-point of heading and position of system-made or human-made. HMI is an important feature, which enables effective and safe operation of system by visual to be helping the DP operator to make optimizing decisions. PRS is a purpose to give DP system an accurate position by a various of type; global and local method. Sensor are basically consist of three kind of them. one is an azimuth reference system represented by gyro compass and another is a motion relative system which is measured a value of roll, pitch and heave. The other is anemometer which is measured a wind speed and direction by ultrasonic. Thruster is fitted to control a movement of ship with surge, sway and yaw. Power system means all components and systems necessary to supply the DP system with the power. DP operator should have a knowledge, understanding and proficiency of all DP component through a process of accredited course for DP certification.
DP system provides a fairly automated elements in conning and controlling a ship. This is because, as we can find in the definition, this system is composed of a computer-based system. Compared to ordinary merchant ships, the fact that there are many more automated elements means that it is an advanced technology, and it is thought that this can ultimately give many implication for the ‘autonomy’ presented by MASS.
3. Application to Maritime Autonomous Surface Ship(MASS)
3.1 Maritime Autonomous Surface Ship (MASS)
Maritime Autonomous Surface Ship (MASS) is defined as a ship which to a varying degree, can operate independent of human interaction(IMO, 2019). The MASS is an important technological factor in the era of fourth industrial revolution of maritime industry, and is a new ‘game changer’ that rapidly changes the shipping, maritime, port, logistics, shipbuilding and ship-based equipment industries, accelerating the digitization, platformization, and intelligentization of related industries(Kim, 2019). MASS technology has positive aspects such as preventing marine accidents, increasing fuel efficiency of ships, and reducing costs, as well as negative aspects such as job-reduction for sailors, task-changes in work, and cyber-security issues(BV 2017)(DNV GL, 2018)(Park et al, 2018). Currently there are a lot of project regarding development, operation, resource management, and optimization of MASS which is continuously being conducted in domestic and foreign.
3.2 Technology development in overseas
The European Union (EU) has implemented MUMIN (Maritime Unmanned Navigation through Intelligence in Networks) Project since 2012, with MARINTEK (Norway), Hochschule Wismar, MARORKA (Iceland), Fraunhofer CML (Germany), Chalmers University (Sweden), University College Cork (Ireland) to develop technologies for unmanned cargo ship operations and assess technical, economic and legal feasibility. The representative core technologies of the MUNIN project are high-tech sensor modules, autonomous ocean navigation systems, remote control systems, maintenance monitoring and control systems, energy efficiency supporting systems, maintenance interaction systems(MOTIE·KIAT report, 2017).
The AAWA (The Advanced Autonomous Waterborne Applications) project, a multinational project based on Finland, has conducted to develop commercial remote controlled vessels in 2020 with the goal of designing and specifying next-generation autonomous vessels and developing fully unmanned automated vessels in 2035 (Laurinnen, 2016).
In the case of Norway, the maritime industry leads the MASS technology. The Kongsberg has conducted ‘Yara Project’ and built a 120TEU container ship called ‘Yara Birkeland’, which is fully electronic and automated. This purposes to control the vessel by fully unmanned autonomous operation as well as improving environmental pollution by using a battery power system instead of the existing internal combustion engine.(Seo, 2018)
The KASS project (Korea Autonomous Surface Ship project) is being also carried out for digital transformation and commercialization of autonomous navigation technology in the maritime field. The aim of the project is to develop systems such as intelligent navigation system and machinery automation system, which are key technologies for MASS, and to set the stage for early commercialization through systematical demonstration. Currently, a second stage study (‘23∼’25) is being prepared to verify various factor of technologies and obtain various data through sea trials (International voyage) of mid-sized merchant ships.
3.3 The key elements of autonomous technology
MASS must ultimately be applied with more diverse equipment and technologies than ordinary ships for “complete autonomy” without human intervention. In MUNIN, the first project of autonomous ships, advanced sensor modules, autonomous ocean navigation systems, and remote control support systems were classified as key technologies.
In the current situation, the DP system provides more precise and accurate controls and movements than the ordinary ships due to the application of various equipment and control systems as described above. In particular, various technologies and functions are applied and provided in the DP vessel, such as sensors that are more sophisticated and precise than those installed on ordinary merchant ships and a lot of type of PRS that can increase efficiency at close range. Therefore, among the various functions of the DP system, I would like to consider some of function that can help ’complete autonomy’ for MASS in the next chapter.
4. The applicable functions
In order to provide precise and accurate movement in DP vessel, a various of functions that are not provided in ordinary ships are provided. Among them, in this paper, it would like to describe three functions.
4.1 DP capability plot
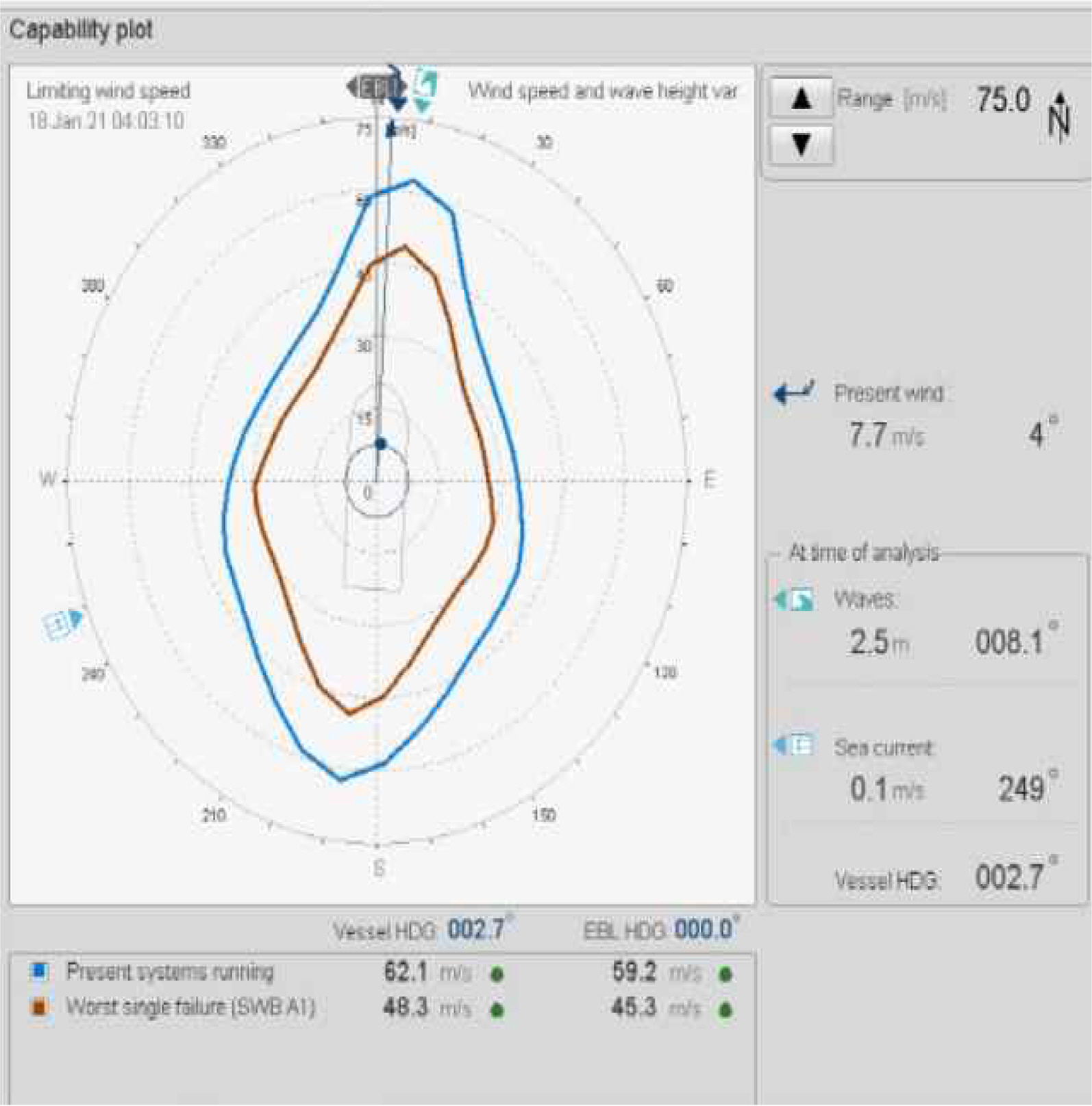
DP capability plot is a crucial tool developed to assess vessel ability to keep position and heading under certain environmental conditions as shown in Fig.2. It is a theoretical tool that predicts the maximum external force condition(mainly wind, wave, current) in which vessel would be able to keep DP operations and allow DP operator to determine a optimum heading for position keeping(ABS, 2013). Based on a vessel design, it is estimated external forces caused by wind, waves and current for every angle of attack. Important assumption is made that directions of this forces are coincident during analysis. It is calculate limiting wind speed and direction for fixed value of DP current, and the DP current is also calculated for fixed value of wind. Typically, it is simulated for four situations.
○ Full thruster and generator status
○ Loss of one or more thruster units
○ Loss of one or more generator
○ Loss of one power bus(Worst Case Failure1))
The analysis based on information including the dynamic-static data of each ship about the maximum external environmental forces which a ship can withstand are necessary under the operational condition of MASS. The Capability Plot, which is intuitively presented, will be able to play a very important role in determining the safe route of autonomous vessels. For example, in case of the weather is expected to deteriorate due to low pressure such as a typhoon, if the maximum value that the ship can withstand is known as how far away the existing route is, economic operation can be promoted with safety guaranteed. Of course, the Capability Plot currently provided by the DP system is provided as a theoretical tool that does not 100% reflect the current status of the ship, but if the function of updating the data used in the modeling of the ship is added in real time, the capability plot that best meets these requirements will be used as an essential element in ensuring the safety operation of MASS.
4.2 A various type of position reference system (PRS)
The precision positioning data is the most important information in operation of ships. There are several means to determine a position of ship at sea. Most traditional methods used for ordinary ships navigation are not accurate enough. For that reason, several position reference systems have been developed during the past decades. The PRS that is used on DP vessels in the offshore fields are as shown table 1.
Due to the environment and nature of offshore operations, the various PRSs have been developed to prepare for cases where satellite signals are not detected for shadow effect of GPS antenna because of height differences when DP vessels approach the platform, and operate efficiently at short distances. On traditional merchant ships, PRS is usually equipped with terrestrial navigation that measures the relative distance and bearing from fixed targets, celestial navigation, and GPS. However, terrestrial or celestial navigation, excluding GPS, is a location measurement method that involves the ability of the person to measure, that is, human factors. It is a method that does not meet the purpose of MASS to reduce or exclude human factors. In order to reduce dependence on only GPS sensor in MASS, the use of various PRSs in coastal areas such as arrival and departure in port should be considered. As described above, various positioning reference system have been developed in Offshore field to measure relative bearing and distance from the refelector targets. It is sufficiently usable if a facility for measuring this distance is introduced to the lighthouses or beacons installed at the time of arrival and departure. In addition, when passing through a bridge or approaching a pier, it will have reliability from GPS shadowing effect caused by superstructure. As previously stated, especially, Laser and Microwave PRSs are all the more so because they can provide as much accuracy as GPS at short range. In addition, the use of various PRSs can be compared to each other for checking the accuracy of sensors that measure the position of ships, which will reveal great advantages in terms of increasing safety of MASS operation.
4.3 Follow target mode
Follow target mode enables the vessel to automatically follow a mobile target in underwater using transponder in HPR system as shown Fig.3.
It maintains position of the vessel relative distance, angle and height to the target. The mobile transponder which is mounted to the target is tracked by the DP system. The operator defines a reaction circle2) which determines the distance of the target can move before triggering a vessel move. Currently, the follow target mode is mainly used for ROV support, training, and plough operations in the sub-sea area. And the function is implemented through ‘mobile’ function in HPR system.(Chae, 2014)
It is expected that large MASS will be able to safely support the arrival and departure operation in port through underwater drones or ROVs if the follow target function using the current HPR system is used. This is the advantage of being another option that can safely help operate in arrival and departure at port when the PRS in the ship does not operate normally, such as an accident or a defect in the device. Since the working transmission medium is not on the surface but under the water, it also has an advantage in terms of safety. Moreover, the follow target mode is possible in areas on the surface such as Laser or Microwave PRS, it will be able to provide safe guidance for large autonomous vessels using small guard boats or chasing boat. It is expected to contribute to the safe operation of MASS by suggesting a way to safely support them by measuring only the relative distance and direction apart from the own PRS mounted and operated on MASS.
4.4 Summary
This chapter studied the applicability and methods for future application in MASS, focusing on functions that can only be provided through the DP system. First of all, the Capability Plot is a function that the vessel can maintain current DP performance depending on weather or power equipment/device conditions, and can be used as an important indicator of how much it can withstand the failure of propulsion/power system equipment or weather deterioration that MASS may experience. Also, The application of various position reference systems(PRSs) can be applied for a great purpose to solve the difficulty of relying only on GPS when MASS may navigate dangerous navigational areas such as narrow channels or arrival and departure at port. In particular, this is because various PRSs used in the offshore field have better accuracy as they are close to each other..The following target mode, which is a DP operation mode currently used very importantly in offshore fields, is a function that is highly robust and stably operated because of the excellent technology development of HPR sensors and transponders. Likewise, it is worth considering as one of the fall-back system which is most focused on MASS technology if it can be incorporated in navigation of dangerous area or arrival and departure at port. However, these functions are currently provided for accurate method of position and heading keeping in DP vessels. So, in order to adopt them in MASS technology, it will be necessary to renew and upgrade suitably the functions.
5. Conclusion
MASS technology is emerging as a policy and technological trend in the maritime sector in the era of the 4th industrial revolution, and is considered technologies that will bring new paradigm changes in the shipbuilding and maritime sector. The main purpose of MASS is to reduce maritime accidents caused by human errors, and it is essential to develop a system that prioritizes safe operation above all else. Therefore, as a representative example, various countries, including the United Kingdom, are planning to review and reassess the dynamic position systems that are not included in traditional merchant ships and introduce them to MASS. Among the traditional ship systems, the DP system is designed to achieve a different purpose from the ship’s operation known so far through precise movement, although there is human intervention. Through to review the component of DP system, it can introduce and provide various functions for safe operation of MASS properly. In particular, in addition to the collision avoidance algorithm of MASS currently being technically developed in the industry, evacuation plans by meteorological or external factors are currently operated entirely based on human experience. The establishment of a ship’s evacuation plan based on the ship’s own performance can greatly contribute to the safe operation of MASS.
And next, the introduction of various PRSs already used in offshore fields as a means of assisting or replacing GPS can show great advantages at the coastal navigation or at port of arrival and departure of MASS. These PRSs are generally very accurate at close range, because areas such as arrival and departure will show excellent performance in the operation range. And if the follow target mode are added to it, the function as another fallback system can be expected in the function of autonomous ships. In addition, if these functions are introduced into the MASS system, it is believed that they will be of sufficient value to support safe operation. There is definitely a limit to transferring the functions applied to the DP system as it is, but based on these concepts, the further research should be continuously conducted to modify and develop MASS system according to the operating characteristics.

 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






