


1. 서 론
해상교통과 같이 선박, 항해사, 관제센터, 해운선사, 기상시스템, 지리정보시스템 등의 높은 복잡도와 방대한 범위의 요구사항을 갖는 시스템의 M&S를 위해서는 인간을 포함한 체계가 필요하다. 즉, 디지털 환경에서 해상교통을 모의하기 위해서는 주요 요소인 인적요인에 대한 모델링 필요하며, 현실감 있는 해상교통 상황의 재현 및 예측을 위해 항해사의 인지 과정, 행동양식, 항해전문성, 항해오류 등을 모델링하여 반영하는 것이 타당하다.
그러나 기존의 해상교통분석 시뮬레이션에서는 타선은 자선의 움직임에 상관없이 초기에 설정된 항로에 따라 하므로, 실제 해상교통 환경에서 이루어지는 자선과 타선의 움직임에 따른 상호작용을 반영하지 못한다. 이러한 문제를 해결하기 위해 해상 교통 정보를 기반으로 사실적 해양 교통 시뮬레이션 환경을 제공하고 무인선, 자율운항선박 등 신개념 선박의 출현과 항해사에 인적요소에 의한 미시적 교통류 시뮬레이션을 위해 에이전트 기반의 항해사 인지행동 모델의 개발이 필요하다.
해상교통분석 시뮬레이션 위해서는 수로환경, 교통특성, 선박, 항해사, 관제사 등의 다양한 요소가 필요하다. 본 논문에서는 항해사 에이전트의 구현을 위한 항해사의 충돌회피를 위한 행동 분석을 수행했으며, 기초 데이터의 확보를 위해 설문조사를 실시하였다. 설문조사를 통해 분석된 정보를 이용하여 선박 충돌상황에서 항해사의 행동과 유사한 에이전트 기반의 항해행동 모델의 설계 결과를 기술하고자 한다.
2. 관련 기술 현황
항해사들이 선박을 운항하는 과정에서 수행하게 되는 인지 및 행동과정을 체계적으로 분석한다는 것은, 선교 장비들의 개선, 교육훈련 방법의 개발, 잠재적인 인적오류의 추출 등 다양한 안전항해를 위한 방안들을 마련하기 위한 기초 작업이다. 항공이나 원자력 분야에서는 작업자의 인지 및 행동을 분석하기 위한 다양한 분석기법들이 개발되었으나, 해양 분야에 서는 새로운 기법에 대한 개발보다는 다음과 같은 응용연구 사례 일부 보고되고 있다.
Lee and Sanquist(2000)은 항해장비 자동화에 따라 유발된 인지작업부담의 유형과 기존장비를 사용할 때의 인지작업부담 유형을 비교분석하기 위해 OFM(operator function model)을 사용하였고, Sanquist et al.(1994)는 장비설계 및 훈련을 평가하기 위해 해상작업에 대한 인지작업분석 방법을 제시하였다. OFM은 복잡한 시스템에서 작업자의 역할을 표현하기 위해 개발된 기법으로, 특정한 상태가 되었을 때 특정한 기능이 요구됨을 나타내는 그래프 방식의 표현기법이다.
또한 Lee et al.(1997)은 “승무정원 결정은 승무원들이 수행하는 인지작업의 난이도”에 따라 결정된다는 전제하에 승무원들의 인지작업을 분석하였으며, Itoh et al.(2001)은 선박항해 과정에서의 위험성을 평가하기 위해 시뮬레이션을 개발하였다.
국내에서 Kim et al(2007)이 “항해전문성이 항해사의 상황인식에 미치는 효과”에서 항해전문성 정도(항해실습 유형 및 실제 항해경험 정도)에 따른 상황인식 수준에서 차이 비교를 통해 항해수행에 기저한 상황인식을 규명하고자 하였다. 또한 선박항해과정에서 선교(Ship bridge)에서 일어나는 인지작업을 분석할 수 있는 인지작업분석 프레임 워크를 개발하고 이를 활용한 항해업무와 관련된 사례분석을 실시한 바 있다(Kim and Hong, 2013; Hong, 2013).
또한 선박해양플랜트연구소와 목포해양대학교가 해양수산부의 지원을 받아 2015년~2018년 동안 수행된 “해양안전사고 예방시스템 기반연구”에서 과거 해양사고발생 현황을 분석하고 항해사의 인지상태와 위험수준을 분석한 인적오류 분석모델을 개발하여 교육훈련에 활용하고 있다(Yang and Kim, 2018)(Yim et al., 2018).
위와 같은 인지작업분석 연구들은 항해서의 의사결정이 이루어지기 전 단계까지 정신활동 분석을 통해, 해상작업 효율을 높이고 인적오류를 감소하기 위한 방안을 찾는데 활용되고 있다. 그러나 해상교통분석 시뮬레이션을 위한 항해사의 세부 특성을 모델링하기에는 아직까지 데이터의 정량화의 한계가 있다.
한편 Park et al.(2015)은 선박의 충돌위험도를 선박운항자의 관점에서 평가할 수 있는 모델을 개발하여 그 위험을 선박의 속도, 침로 등을 조정하여 각 교통 상황별 충돌 위험도를 사전에 예측할 수 있는 위험도 예측 모듈을 개발하였다. 이 모델은 항해사의 인적요인이 반영되어 있어, 해상교통 분야에서는 널리 쓰이고 있다.
해상교통 분야에서 에이전트 기반의 인지 및 행동모델에 대한 연구는 거의 없으며, Kim et al.(2018)이 “Multi-agent 주행 시뮬레이션을 이용한 운전자 주행패턴을 반영한 공격운전 검지기법 개발”에서 자동차 운전의 공격성을 사전에 예측하기 위한 운전자 주행패턴 연구를 진행한 바 있다.
또한 국방분야에서는 CGF/SAF(Computer Generated Force/Semi-Automated Force)가 인간 등의 자율적 세력을 표현하기 위해 제안된 국발 모델링 및 시뮬레이션(Defence Modeling and Simulation, DM&S) 기법으로 주목받고 있다. 현재 CGF/SAF는 정해진 규칙에 따라 간단한 자율 행동을 보일 수 있는 수준으로서 DM&S의 군사 모델링에 폭넓게 활용되고 있다. Ji et al.(2008)은 “에이전트 기반의 인간 미개입형 함정전투 M&S 시스템 설계 및 서해교전 사례연구”를 통해 함정전투체계의 교전시뮬레이션에서 함정 전투 M&S 프레임 워크와 자율 에이전트 설계원칙을 도입함으로써 인간 미개입형 M&S 시스템 설계 개념과 방법론을 제시하였다.
자동차와 국방분야에서 활용하고 있는 에이전트 기반의 M&S(Agent-based M&S, ABMS)는 다양한 에이전트들간의 세밀한 행동과 상호작용을 재현할 수 있어서, 공학분야 뿐만 아니라 사회과학의 정책실험에 활용되고 있다. 본 연구에서도 이와 같은 ABMS 개념을 활용하여 해상교통분석 시뮬레이션을 위한 에이전트 기반 항해사 행동모델을 개발하고자 한다.
3. 항해사 에이전트 모델 설계
일반적으로 에이전트 기반의 모델은 개별적이고 자율적인 가상현실 객체인 에이전트와 하나 이상의 다른 에이전트 간의 상호작용을 정의하여, 특정 현상을 시뮬레이션할 수 있게 해주는 계산 기반 모델이다(Jung et. al., 2018).
본 연구에서는 해상교통과 관련 다양한 에이전트 중에서 선박운항과 관련된 항해사의 항해행동을 분석하고, 이를 통해 분석된 정보를 이용하여 항해사의 행동과 유사한 에이전트 기반의 항해행동 모델을 개발하고자 한다.
3.1 에이전트 기반 항해사 행동 모델링 기술
항해 행동 분석 기술은 항해사의 인지과정을 거쳐 행위에 영향을 미치는 작업 및 환경 요인(작업 부하, 스트레스, 알코올, 피로 등)이나 개별적 요인(경험, 지식, 능력 등)을 찾아내고 분석하는 기술이다.
현실감 있는 해상교통 상황을 모의하기 위해서는 항해사의 행동양식, 항해전문성, 항해오류 등을 모델링하여 에이전트 기반의 시뮬레이션이 가능하도록 하는 항해사 행동을 모델링할 필요가 있다. 에이전트 기반 항해사 행동 모델링 기술은 항해사의 행동에 영향을 미치는 요인을 정량화하여, 선박 에이전트가 실제 선박과 유사하게 거동할 수 있도록 행동 정보를 전달하는 기술이다. 여기서 선박 에이전트는 장애물과 충돌 없이 목적지점까지 항해하기 위해 기본적인 충돌회피 기능을 갖는 에이전트이다.
3.2 항해사 행동 관계성 및 행동오류 분석
· 항해업무 : 침로유지, 항해계획 수립, 선속확인 (변침점, 시간, 속력, RPM)
· 항해위험 회피 : 해상환경인지, 항해위험요소 식별, 충돌방지, 좌초방지 (CPA/TCPA, 거리/방위)
· 해상통신 : GMDSS, MSI, 선박 간 통신, VTS 통신 (보고 위치, 규정 등)
또한 중앙해양안전심판원에서 해양사고 통계자료를 바탕으로 최근 5년간 해양사고 원인현황을 분석해 보면(MOF, 2020), 해양사고와 관련된 항해사의 행동오류는 주변상황에 대한 육안 경계소홀, 레이더에 의한 적절한 식별 미이행, 타선과의 통항 시 항법과 관련된 위반, 선박 조선술에 관련 부적절한 항해 등의 4가지 유형으로 분류할 수 있다.
항해사 업무분석을 통한 항해업무 관련 데이터 식별과 해양사고 발생 메커니즘의 분석을 통해, 항해사가 인지과정을 거쳐 항해행위에 영향을 미치는 작업 및 환경 요인(작업 부하, 스트레스, 알코올, 피로 등)이나 개별적 요인(경험, 지식, 능력 등)을 Table 1과 같이 식별하였다.
위와 같은 항해사 행동오류 영향 요인의 정량화를 위해, Table 2와 같이 각 행동오류의 판단을 위한 항목 및 기준의 설정이 필요하며, 본 연구에서는 설문조사와 시뮬레이터 실험을 통해 행동시점과 제어량을 정량화하고자 한다.
3.3 항해사 에이전트 모델 설계
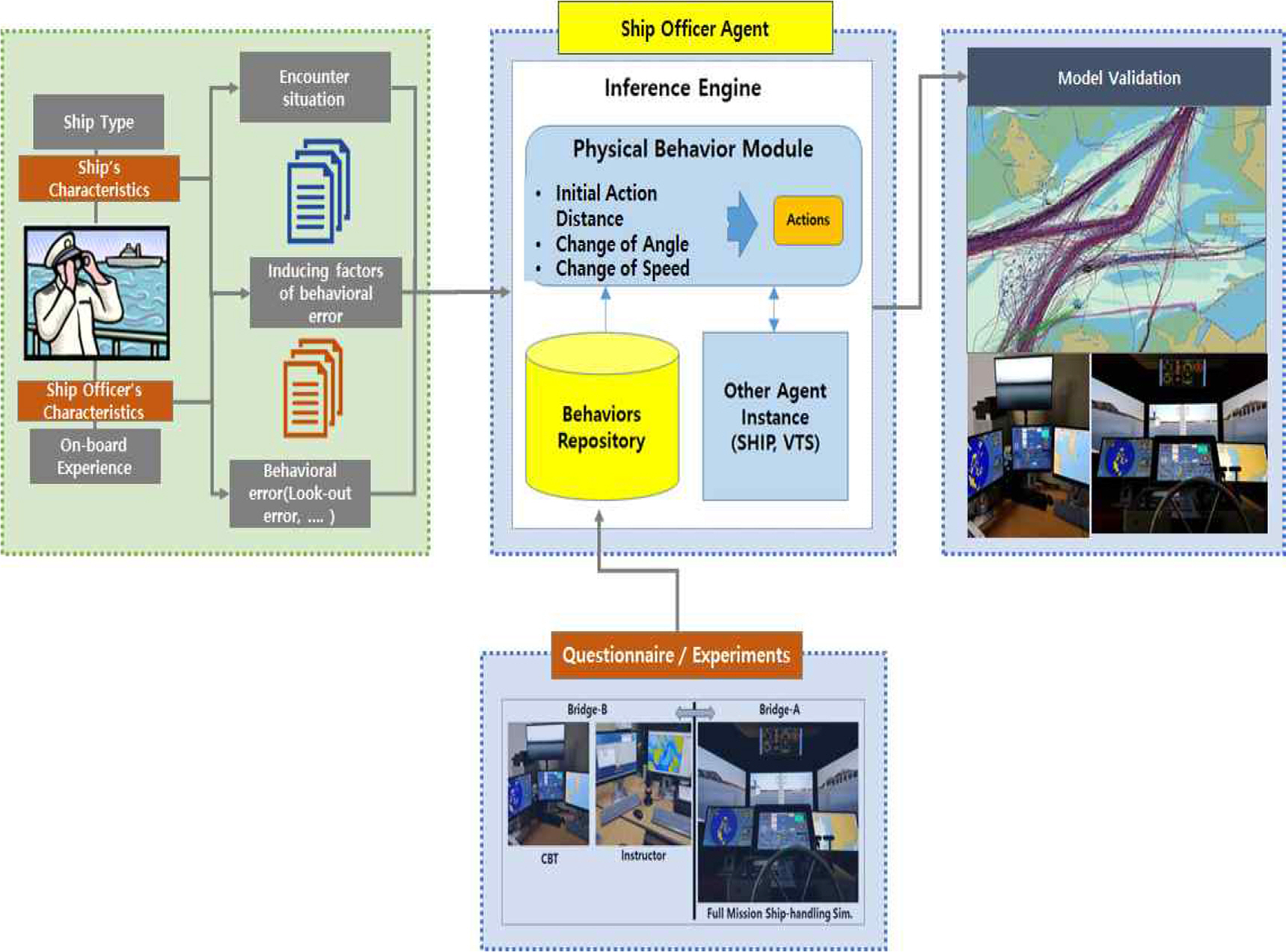
항해사 에이전트는 Fig. 1과 같이 선박 항해 에이전트 및 관제사 에이전트와 상호작용하여, 선박 항해 에이전트가 실제 선박과 유사하게 거동할 수 있도록 항해 행동 정보를 생성하여 전달한다.
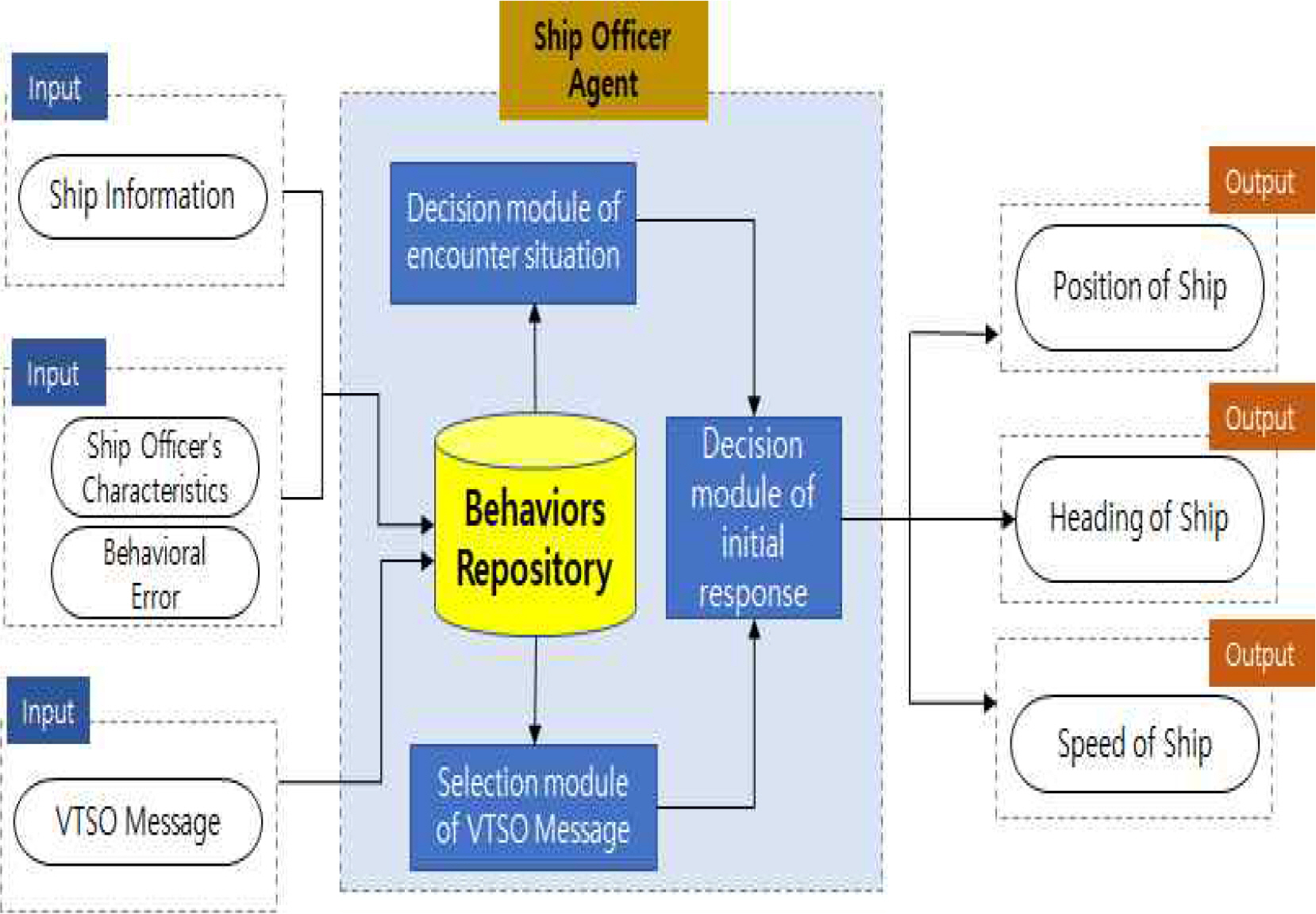
항해사 에이전트의 주요 기능은 Table 3과 같이 항해사와 선박의 특성을 입력 받아, 조우상황 및 피항여부를 판단하고, 항해오류 및 관제 개입 여부에 따른 초동조치 거리(시점), 변침량과 변속량을 선박 항해 에이전트에게 전달한다.
즉, 항해사의 최종적인 행동은 초동조치 거리(시점), 타(변침각도)와 속도(엔진)의 제어이며, 이러한 행동은 조우상황과 항해 조건과 항해사와 선박의 특성, 항해오류, 관제 개입 등에 따라 행동시점과 제어량이 상이하다.
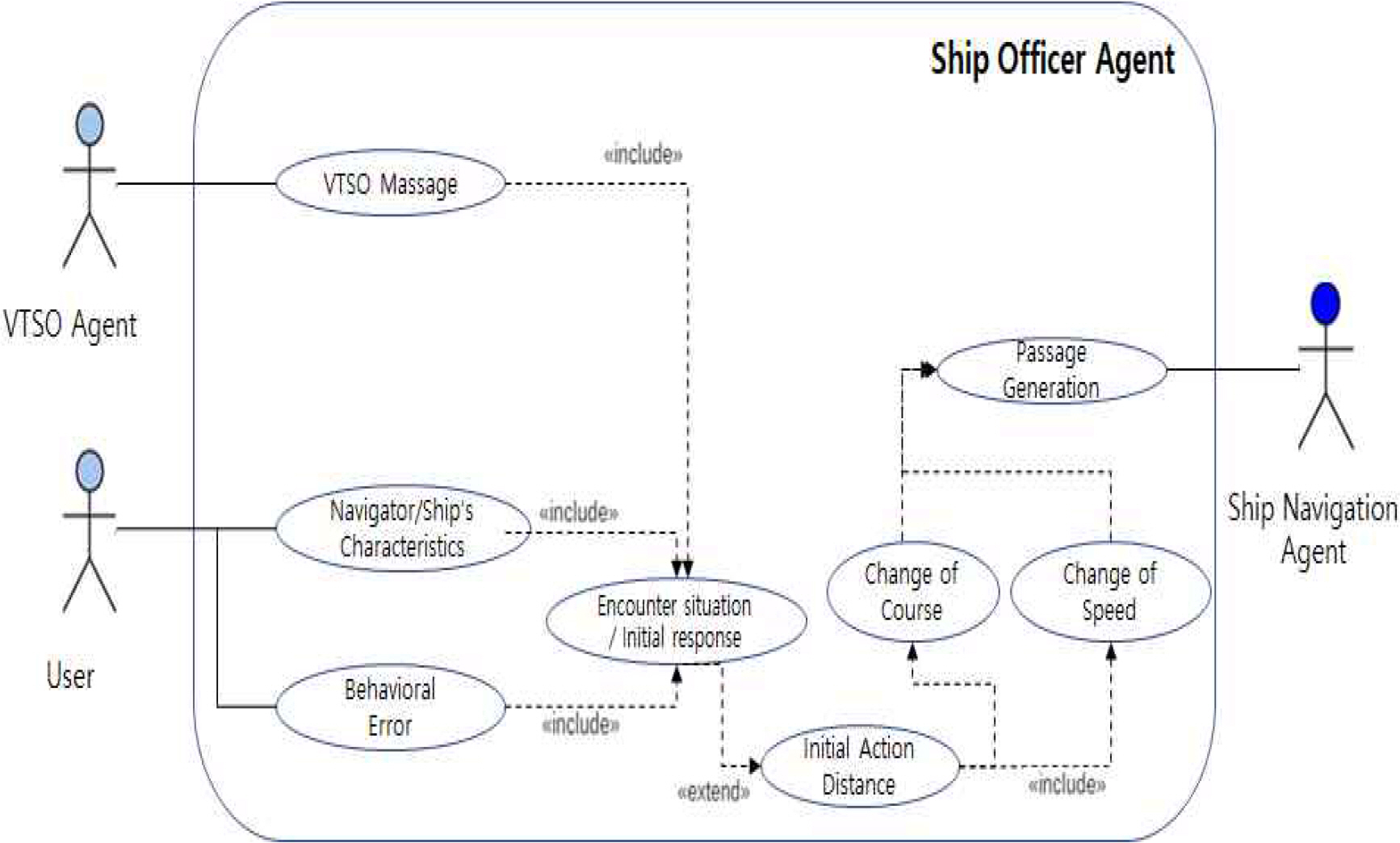
항해사 에이전트는 사용자로부터 항해사 및 선박 특성 정보와 항해오류 정보를 전달받고, 관제사 에이전트로부터 관제 개입 정보를 전달 받는다. 이를 반영한 조우상황의 인지 및 피항 여부 판단 후, 선박 제어를 위한 피항 시점( 리)과 변침량 및 변속량을 연동 에이전트를 통해 선박항해 에이전트에 출력한다. Fig. 4와 같이 유스케이스(Usecase)에서 “사용자”는 “연동 에이전트”로 시뮬레이션 입력 정보를 제공한다.
ABMS 연동 검증을 위해 항해사 에이전트는 본선과 타선박의 위치정보를 바탕으로 선박 조우 상황 및 피항여부를 판단하여 변침/변속량을 선택하고, 선택된 변침/변속량은 선박항해 에이전트에 제공되어야 하므로, Table 4와 같이 선박 조우 상황 및 피항 시점, 변침/변속량의 적절성 여부가 검증되어야 한다.
4. 충돌회피 행동분석을 위한 설문조사
본 연구에서는 항해사의 충돌회피 행동에 대한 기초 데이터 확보를 위해, 2020년 5월부터 2개월간 선박 항해사들을 대상으로 심층 설문조사를 실시하였으며, 총 132명의 응답을 수신하여 분석을 수행하였다.
4.1 충돌회피 행동분석 설문 개요
항해사의 충돌회피 행동분석을 위한 설문은 응답자의 인적 정보와 항내에서의 이격거리 및 안전속력, 조우 상황별 초동 조치에 대한 선택형 질의들로 구성하였다.
인적정보에 대한 설문사항으로 선종(어선/상선)과 승선경력을 응답하도록 하였다. 응답을 통해 어선과 상선 및 승선경력에 따른 그룹별 충돌회피 행동분석이 가능하다.
항내에서의 이격거리 및 안전속력에 대한 설문사항은 VTS 에이전트 개발과도 연계되며, 항해사가 생각하는 최소한의 항내 안전운항을 위한 정량적 기준을 확인하고자 하였다.
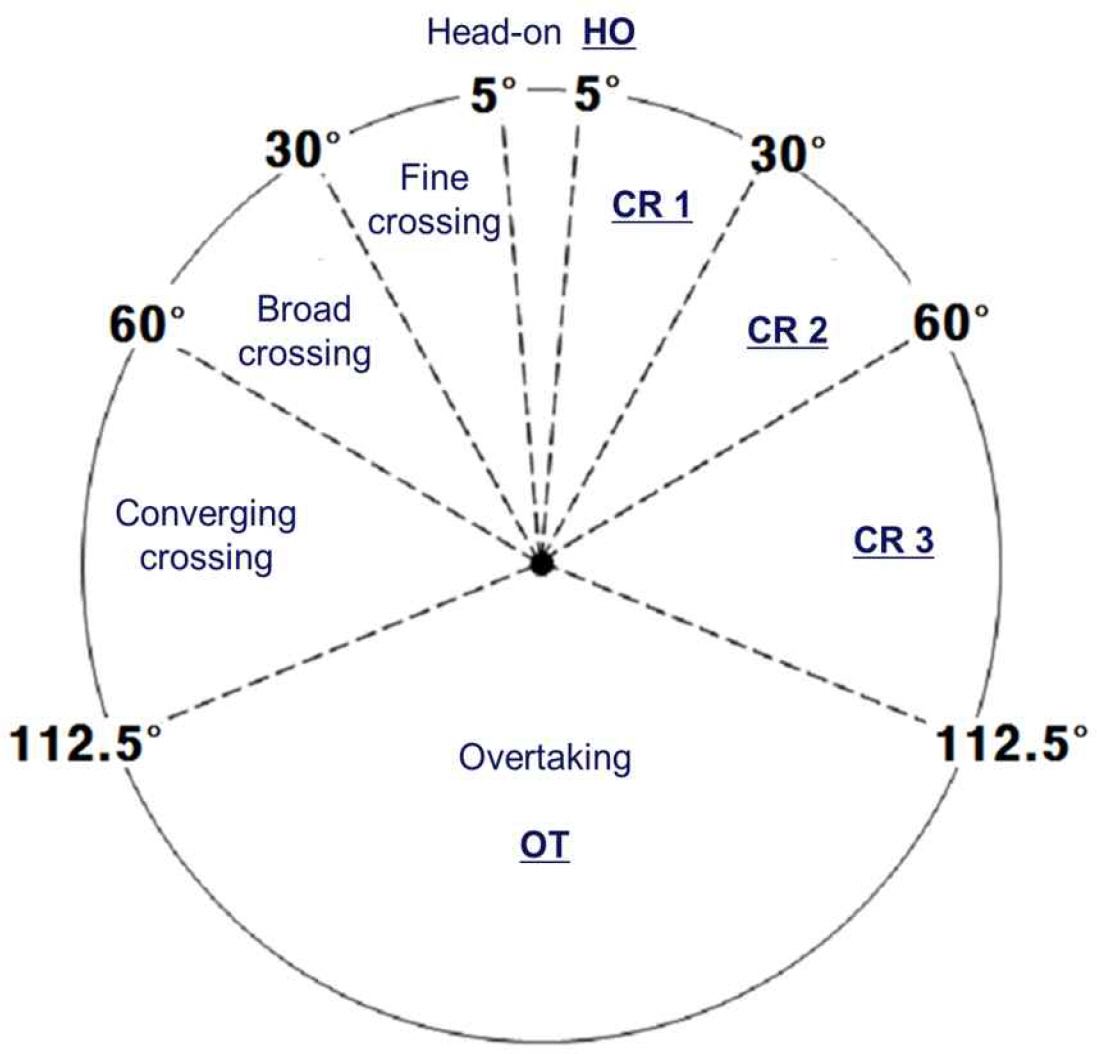
조우 상황별 초동조치에 대한 설문은 조우각도에 따라 위험도를 느끼는 수준이 상이하므로(Lee et al, 2014), Fig. 5와 같이 조우 상황을 5가지로 구분하여 응답자들의 충돌회피 행동을 조사 분석하였다.
4.2 조우 상황별 충돌회피 동작
각 조우 상황에서의 충돌회피를 위한 동작은 선박의 변침과 선속 변경의 측면에서 Table 5와 같이 변침(Alter course), 증속(Increase speed), 감속(Decrease speed), 변침과 증속(Alter course and increase speed), 변침과 감속(Alter course and decrease speed)의 5가지 유형으로 제시하였다. Fig. 5의 각 조우상황에서 타선과의 충돌 위험을 확인한 경우, 충돌회피를 위해 어떤 초동조치를 취할 것인가에 대해 설문한 것으로서 결과는 Table 5와 같다.
설문결과, 모든 조우상황에서 충돌회피를 위해 가장 선호하는 초동조치는 변침(Alter course)이였다. Table 5에서 HO 상황에서 약 75.8%의 항해사가 변침만으로 충돌을 회피할 것으로 응답하였고, CR 1(63.6%), CR 2(59.9%), CR 3(40.9%)로 선박 간 교각이 적어질수록 응답자 수는 감소하였다. 반대로 변침과 감속(Alter course and decrease speed)의 초동조치는 HO 상황에서 약 15.9%의 항해사만이 응답하였으나, CR 1(20.5%), CR 2(25.8%), CR 3(28.0%)로 선박 간 교각이 적어질수록 응답자 수는 증가하였다. Table 6은 변침(Alter course) 또는 변침과 감속(Alter course and decrease speed)으로 충돌을 회피하고자 할 때, 적정 변침각(Turning angle)과 감속률(Deceleration rate)을 평균(Mean, M)과 표준편차(Standard deviation, SD)로 나타낸 표이다. 변침각과 감속률은 선박 간 교각이 적어질수록 증가하였으나, OT 상황에서는 HO 상황에 비해 변침각을 작게 하여 충돌을 회피하는 것으로 분석된다.
4.3 그룹별 충돌회피 행동분석
132명의 응답자들은 어선 또는 상선으로 승선하는 선종이 다르고 경력도 다양하다. 승선하는 선종과 승선 경력이 충돌회피 행동에 주는 영향을 확인하기 위해 설문 결과를 그룹별로 분류하여 분석하였다. 먼저 승선 선종에 따라 유의한 차이를 보이는지 검증하고자 독립표본 t-검정을 실시하였다. 그룹(Group)은 상선(Merchant vessel, MV)과 어선(Fishing vessel, FV)으로 각각 63명, 69명의 표본(Sample, S)으로 구분하였다. t-검정 대상인 종속변수(Dependent variable, DV)는 항내 안전이격거리(Safe passing distance), 안전속력(Safe speed), 상황별 초동조치 거리(Initial response distance)로, 검정 결과는 Table 7과 같이 모든 종속변수들에 대해 유의한 것으로 분석되었다(p<.05).
모든 종속변수에서 어선 응답자들은 상선 응답자보다 항내 안전이격거리와 안전선속, 상황별 초동조치 거리에 대해 적은 값으로 응답하였고 그 차이가 유의하다. 어선과 상선의 조종 성능 차이가 응답자들의 충돌회피 행동에도 영향을 미치는 것으로 분석되며, 항해사 에이전트 개발 시 이러한 선종별 특성 반영이 필요하다.
Table 8은 승선경력에 따라 유의한 차이를 보이는지 검증하고자 독립표본 t-검정을 실시한 결과이다. 그룹은 승선경력 10년 미만인 경우(Beginner and Intermediate, BI)와 10년 이상인 경우(Highly skilled, HS) 각각 60명, 72명의 표본으로 구분하여 분석하였다. 항내 안전이격거리와 HO/CR 1/CR 2/CR 3 상황에서의 초동조치 개시거리는 경력에 따라 유의한 차이를 보였다(p<.05). 승선경력 10년 미만인 응답자들은 10년 이상인 응답자들에 비해 항내 안전이격거리를 더 확보하려 하고, 상황별 초동조치 거리에 있어서는 보다 먼 거리에서 사전에 조치가 필요하다는 응답을 하였다. 반면에 항내 안전속력과 OT 상황에서의 초동조치 개시거리는 t-검정 결과에 유의한 차이를 보이지 않았다. 승선경력과 관련 없이 항내 안전속력과 OT 상황에서는 유사한 판단을 내리는 것으로 분석되었다.
5. 결 론
자동차 및 국방 분야에서는 전술, 전략지식, 운전행동과 같은 인간의 복잡한 행동을 자율 에이전트 시스템으로 구축하는 시도는 이루어지고 있으나, 정교한 행동모델과 다중 플랫폼 간의 연계 미흡으로 현장 적용단계에 이르지 못하고 있다. 현재 자율운항선박 및 스마트 해상물류가 본격적으로 논의되고 있으나, 국내외적으로 항해사의 위험 행동요인을 반영한 해상교통분석 연구는 초기 단계이다.
본 논문에서는 해상교통류 분석을 위한 지능형 선박 에이전트 개발을 위해 선박운항과 관련된 항해사의 행동을 분석하고, 이를 통해 분석된 정보를 이용하여 항해사의 행동과 유사한 에이전트 기반의 행동 모델 개발 내용을 기술하였다.
또한 항해사의 충돌회피를 위한 행동 분석을 위해 수행된 설문조사 분석결과를 소개하였다. 분석결과 선종 및 경력에 따라 많은 종속변수들에 대해 유의한 차이를 확인하였다. 항해사 에이전트의 충돌회피 행동에 적용하기 위한 설문 분석의 주요결과는 다음과 같다.
· 어선이 요구하는 항내 안전이격거리는 상선에 비해 작아, 선박 크기에 영향을 받는 것으로 분석
· 충돌회피의 초기 동작은 변침으로 이행되며, 필요 변침량은 OT<HO<CR1<CR2<CR3 순으로 증가
· 항해사 에이전트 모델은 어선과 상선, 경력의 정도를 구분하여 충돌회피 행동 특성반영 필요
설문분석을 통하여 확보된 항해사의 충돌회피 행동 특성 데이터는 현재 개발 중인 항해사 에이전트 프로그램에서 선박의 조우상황을 인식한 후, 초기 충돌회피를 위한 안전거리, 침로 및 엔진제어에 활용할 예정이다.
또한 항해사이 특성을 정밀하게 반영하기 위해 설문 집단을 상선-초보자, 상선-경력자, 어선-초보자, 어선-경력자 등으로 세분화하여 추가적인 분석을 진행 중이다.
국내외적으로 해양사고의 60-80%가 인적요인에 기인한 것으로 보고되고 있고, 이러한 인적요인에 대해 정량적 모델링을 위한 다양한 접근방법의 연구가 진행되고 있다. 디지털 환경에서의 해상교통에 대한 정확한 모의를 통해 선박 및 해양 관련 업무 종사자들의 인적요인에 의한 해양사고율 저감과 해 운선사ㆍ선원에 대한 안전관리를 위한 대책마련에 기여할 수 있다. 본 연구의 결과는 선박 에이전트 및 관제사 에이전트 등과 연동되어 해상교통 재현 및 예측 시뮬레이션 플랫폼 개발을 위해 활용될 것으로 기대한다.
 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






