

1. ه£ نةب
ه╡£م╖╝ هبن░ـهإء هتîه┤ê ن░ ه╢رنî هéشم│بنة£ هإ╕وـءهùش ن░£هâإوـءنè¤ وـ┤هûّهءج هù╝نش╕هب£هù نîوـ£ م┤هïشهإ┤ ه╗جهدهù ن¤░نإ╝ هبن░ـهإء هة░هتàه▒نèحهù نîوـ£ م┤هïشن نْهـهدم│ب هئêنïج. وè╣وئê, هبن░ـهإء نîوءـوآ¤هù ن¤░نإ╝ هب£وـ£هêءنة£ نح╝ هأ┤وـصوـءنè¤ هبن░ـهإ┤ هخإم░وـءم│ب, هبه▓┤ هéشم│بهإء 1/3 هإ┤هâهإ┤ هûـهإ هêءهïشهùه£ ن░£هâإوـءم╕░هù هب£وـ£هêءنة£ هجّ هة░هتàه▒نèحهإء وëم░نè¤ ن¤هأ▒ هجّ هأ¤وـ┤هدم│ب هئêنïج. وè╣وئê هب£وـ£هêءنة£ هة░م▒┤هùه£ هأ┤وـصوـءنè¤ هبن░ـهإء م▓╜ هأ░ هإ╝ن░ء نîهûّهإ هأ┤وـصوـءنè¤ هبن░ـم│╝ نïجنح╕ هة░هتàوè╣ه▒هإ┤ ن░£هâإوـءنر░ هبن░ـهإء هـêهبوـ£ وـصوـ┤نح╝ ه£وـ┤ نïشنإ╝هدنè¤ هبن░ـهإء هة░هتàوè╣ه▒ ه╢¤هبـهإ┤ هجّهأ¤وـءنïج.
هبن░ـهإء هة░هتàه▒نèحهإ ه╢¤هبـوـءنè¤ م░هئح هبـوآـوـ£ ن░رن▓ـهùنè¤ هïجهبهإء هï£هأ┤هب ن░رن▓ـهإ┤ هئêهدندî م│╝نوـ£ هï£م░م│╝ ن╣هأرهإ وـهأ¤نة£ وـ£نïج. هإ┤ ناشوـ£ هإ┤ه£بنة£ هبن░ـهإء هة░هتàه▒نèحهإ ه╢¤هبـوـب نـî هئه£بوـصهث╝نح╝ هإ┤هأروـ£ ن░رن▓ـ, هة░هتàهأ┤نآ ن░رهبـهïإم│╝ م╡شهنزذوءـهï£وùءهإء م▓░م│╝نة£ نه╢£ن£ هة░هتà ه£به▓┤نبح ن»╕م│هêءنح╝ هإ┤هأروـءهùش م░هبّهبه£╝نة£ ه╢¤هبـوـءنè¤ ن░رن▓ـهإ┤ هإ╝ن░ء هبه£╝نة£ هإ┤هأرن£نïج. وè╣وئê م╡شهنزذوءـهï£وùءهإ و╡وـ┤ هبـن نْهإ ه£به▓┤ نبح ن»╕م│هêء ه╢¤هبـهإ┤ م░نèحوـءم╕░ نـîنش╕هù هإ┤نح╝ و╡وـ£ هبن░ـهإء هة░هتàه▒ نèح ه╢¤هبـ هù░م╡شهآ وـذم╗ء هب£وـ£هêءنة£م░ هبن░ـهù ن»╕ه╣ءنè¤ هءوûحهإ هـîهـ ن│┤م╕░ ه£وـ£ هù░م╡شنè¤ هïجوùءهبهإ╕ ن░رن▓ـم│╝ هêءه╣ءهبهإ╕ ن░رن▓ـه£╝نة£ ندهإ┤ هêءوûëنءهû┤ هآ¤نïج. Vantorre et al.(2003)هإ م▓╜هéشهد ن▓╜هإ┤ م╡شه╢ـن£ هêءهة░هùه£ م╡شهنزذوءـهï£وùءهإ هêءوûëوـءهùش هêءهïش, هبن░ـم│╝ ه╕ةن▓╜هéشهإ┤هإء م▒░نخش, هبههإء هءوûحهإ هة░هéشوـءهءم│ب هبن░ـم│╝ ن▓╜ هéشهإ┤هù هâوء╕هئّهأر وـءنè¤ وئءهإ م│هé░وـب هêء هئêنè¤ م▓╜وùءهïإهإ هب£هـêوـءهءنïج. هب£وـ£هêءنة£ هجّ م╡شهنزذوءـهï£وùءهù م┤وـ£ هù░م╡شنè¤ Sano et al.(2014)م░ ه╗ذوàîهإ┤نê نزذ وءـهبهإ هإ┤هأروـءهùش م╡شهنزذوءـهï£وùءهإ هêءوûëوـءهءم│ب, Furukawa et al.(2015)م░ KCSهآ KVLCC2هبوءـهإ هإ┤هأروـءهùش ه▓£هêءهآ ه╕ةن▓╜هإ م╡شوءوـ£ هءêهإ╕هêءهة░هùه£ م╡شهنزذوءـهï£وùءهإ هêءوûëوـ£ ن░¤ هئêنïج. Liu et al.(2015)نè¤ KVLCC2 هبوءـهإ هإ┤هأروـءهùش ه╕ةن▓╜هإ م╡شوءوـ£ هâوâ£هù ه£ PMM هï£ن«شنبêهإ┤هàءهإ هêءوûëوـءهءم│ب ه╣ذنة£هـêهبـه▒هإ وëم░وـءهءنïج. Liu et al.(2017)نè¤ ه▓£هêءهآ ه╕ةن▓╜هإ┤ م╡شوءن£ وأîنحءهêءهة░هùه£ م╡شه نزذوءـهï£وùءهإ هêءوûëوـءهءم│ب KVLCC2هإء ه╣ذنة£هـêهبـه▒هإ وëم░وـءهءنïج.
ن│╕ هù░م╡شهùه£نè¤ هب£وـ£هêءنة£نح╝ هأ┤وـصوـءنè¤ هبن░ـهإء ه╣ذنة£هـêهبـه▒نèح هإ ه╢¤هبـوـءم╕░ ه£وـ┤ هة░هتàهأ┤نآ ن░رهبـهïإم│╝ م░هâ م╡شهنزذوءـهï£وùء هï£ن«ش نبêهإ┤هàءهإء م▓░م│╝نة£ نه╢£وـ£ ه£به▓┤نبح ن»╕م│هêءنح╝ هإ┤هأروـءهùش ه╣ذنة£هـêهبـ ه▒نèحهإ ه╢¤هبـوـءهءنïج. نءوـ£ هة░هتà هêءوـآ نزذن╕ هجّ هبه▓┤, و¤نة£وبناش, وâنح╝ ن╢نخشوـءهùش ه£به▓┤نبحهإ نزذن╕ندوـءنè¤ ن░رهïإهإ╕ نزذنôêوءـ(modular type) نزذن╕هù هب£وـ£هêءنة£هإء هءوûحهإ م│بنبجوـءنè¤ وـصهإ ه╢¤م░وـءهùش هة░ هتà هï£ن«شنبêهإ┤هàء نزذن╕هإ م╡شه╢ـوـءم│ب هدهد ن░ Zig-zag هï£ن«شنبêهإ┤هàء هإ و╡وـءهùش هب£وـ£هêءنة£ هجّ هة░هتàه▒نèح ه╢¤هبـ هù░م╡شنح╝ هêءوûëوـءهءنïج.
2هئحهùه£نè¤ ن│╕ هù░م╡شهùه£ هéشهأرن£ هتîوّ£م│هآ هة░هتàهأ┤نآ ن░رهبـهïإ هإ هجنزàوـءهءم│ب, 3هئحهùه£نè¤ هب£وـ£هêءنة£ هجّ م░هâ م╡شهنزذوءـهï£وùء هة░ م▒┤ ن░ هêءوûë م▓░م│╝هù نîوـ£ هجنزà, 4هئحهùه£نè¤ هب£وـ£هêءنة£ هجّ هة░هتà هï£ ن«شنبêهإ┤هàءهإ هêءوûë م▓░م│╝هù نîوـ£ هجنزàهإ وـءهءم│ب 5هئحهù م▓░نةبهإ نé┤ نب╕نïج.
2. هة░هتàهأ┤نآ ن░رهبـهïإ
2.1 هتîوّ£م│
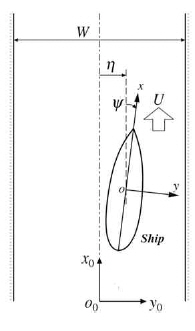
ن│╕ هù░م╡شهùه£ هéشهأرن£ هتîوّ£م│ ن░ وîîنإ╝نر¤وâنè¤ Fig. 1م│╝ م░آنïج. هتîوّ£م│هإء x, yه╢ـهإء هؤهبهإ هبه▓┤ هجّهـآن╢نة£ ه╖ذوـءم│ب هبن░ـهإء هبهêء ن░روûحهإ xه╢ـ, هأ░وء ن░روûحهإ yه╢ـ, هبهب ن░روûحهإ zه╢ـهإء هûّ(+)هإء ن░ر وûحه£╝نة£ هبـهإءوـءهءنïج. Wنè¤ هêءنة£هإء وص, Uنè¤ هبه, ╬▓نè¤ هéشوـصم░, ╬╖ نè¤ هêءنة£ هجّهïشهبه£╝نة£ن╢و░ نûذهû┤هد هبن░ـ هجّهïشم╣îهدهإء م▒░نخشنة£ هدهبـ وـءهءنïج. ╬╖نè¤ هبن░ـهإء هجّهïشهإ┤ هêءنة£ هجّهïشهبه£╝نة£ن╢و░ نûذهû┤هد م▒░نخش نح╝ نéءوâنé┤نر░, هب£وـ£هêءنة£هإء هءوûحهإ م│بنبجوـءم╕░ ه£وـءهùش نïجهإîم│╝ م░آ هإ┤ هبـهإءوـءهءنïج. ╬╖ ╦آ = u s i n ╧ê + ╧à c o s ╧ê
2.2 هة░هتàهأ┤نآ ن░رهبـهïإ
ن│╕ هù░م╡شهùه£نè¤ هبوؤنآهأ¤(Surge), هتîهأ░نآهأ¤(Sway), هبهêء نآهأ¤(Yaw)هإء 3هئه£بن هة░هتàهأ┤نآ ن░رهبـهïإهإ هéشهأروـ£نïج.
نءوـ£ ن│╕ هù░م╡شهùه£نè¤ هبه▓┤هآ و¤نة£وبناش, وâهù هئّهأروـءنè¤ ه£به▓┤ نبحهإ م░م░ ن╢نخشوـءهùش م│بنبجوـءنè¤ MMG هêءوـآنزذن╕هإ هéشهأروـءهءنïج. هïإ (1)هإء هأ░ن│هùه£ هبه▓┤هù هئّهأروـءنè¤ ه£به▓┤نبحهإ هïإ (2)هآ م░آهإ┤ وّ£وءن£نïج.
(2)
3. هب£وـ£هêءنة£ هجّ م░هâ م╡شهنزذوءـهï£وùء هة░م▒┤
3.1 نîهâ هبوءـ
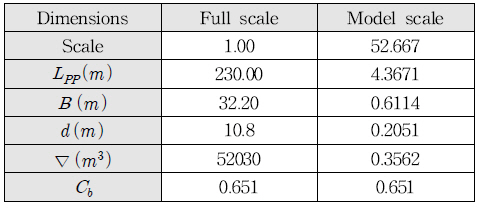
ن│╕ هù░م╡شهùه£نè¤ م░هâ م╡شهنزذوءـهï£وùء هï£ن«شنبêهإ┤هàءهإء م▓░م│╝نح╝ ن╣ م╡وـءم╕░ ه£وـ┤ Furukawa et al.(2015)م░ هêءوûëوـ£ نزذوءـهï£وùء م▓░م│╝ م░ هئêنè¤ KCSنح╝ نîهâهبن░ـه£╝نة£ هبهبـوـءهءنïج. KCSهإء هبوءـ ن░ هث╝ هأ¤ هب£هؤهإ Fig. 2هآ Table 1هù هبـنخشنءهû┤ هئêنïج.

3.2 هêءه╣ءوـ┤هإ هة░م▒┤
هâهأر هêءه╣ءوـ┤هإ و¤نة£م╖╕نئذه£╝نة£ RANS(Reynolds Average Navier-Stokes) م╕░ن░ء هêءه╣ءوـ┤هإ و¤نة£م╖╕نئذهإ╕ STAR-CCM+نح╝ هéشهأروـءهءنïج. ن│╕ هù░م╡شهùه£نè¤ م│هé░ هءهùصهإ Fig. 3م│╝ م░آهإ┤ هدهبـوـء هءنïج. هبه▓┤ م│هé░ هءهùصهإء وشم╕░نè¤ هبه▓┤ هـئهز╜ه£╝نة£نè¤ هبه▓┤ م╕╕هإ┤هإء 2.0ن░░, هبه▓┤ نْجهز╜ه£╝نة£نè¤ هبه▓┤ م╕╕هإ┤هإء 2.5ن░░, هبه▓┤ ه£هز╜ه£╝نة£نè¤ 0.5ن░░نة£ هدهبـوـءهءنïج. هب£وـ£هêءنة£نح╝ م╡شوءوـءم╕░ ه£وـءهùش هبهبهآ ن░¤نïح نر┤م╣îهدهإء م▒░نخشنè¤ هêءهïش/وإءهêء = 1.2نة£ م▓░هبـوـءهءنïج.

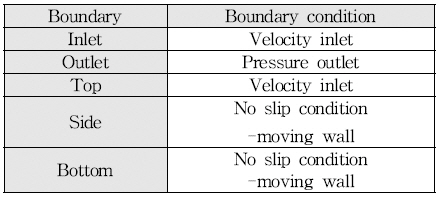
م│هé░ م╕░ن▓ـهإ هبه▓┤هإء نآهب هئه╕ن│وآ¤نح╝ م│بنبجوـءم╕░ ه£وـ┤ه£ م│ هé░ هءهùص هبه▓┤نح╝ ن│ّهد/وأîهبوـءنè¤ DFBI(Dynamic Fluid Body Interaction) م╕░ن▓ـهإ هéشهأروـءهءم│ب هب£وـ£هêءنة£ هة░م▒┤هùه£هإء هئه╕ن│ وآ¤نح╝ م│هé░وـءم╕░ ه£وـءهùش Overset meshم╕░ن▓ـهإ هبهأروـءهءنïج. م▓╜م│ هة░م▒┤هإ هـنئءهإء Table 2هآ م░آهإ┤ هجهبـوـءهءنïج.
3.3 م▓رهئ هêءنب┤ه▒ م▓وب
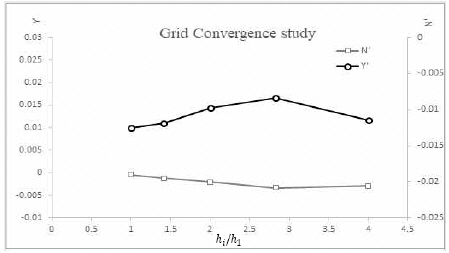
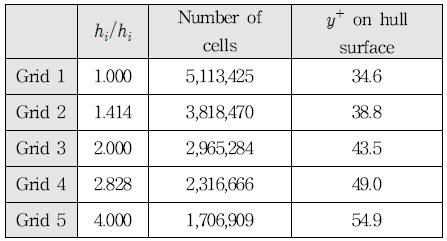
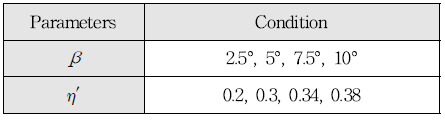
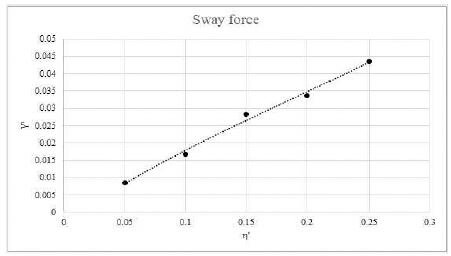
م░هâ م╡شهنزذوءـهï£وùء هï£ن«شنبêهإ┤هàءهإ هêءوûëوـءم╕░هù هـئه£ م▓رهئ هêء نب┤ه▒هإ م▓وبوـءهءنïج. ╬╖ظ▓=0.38 ه£ه╣ءهùه£هإء ه£به▓┤نبح م│ه╕ة هï£ن«شنبê هإ┤هàءهإ نîهâه£╝نة£ 5م░£هإء م▓رهئم│هù نîوـ┤ م▓رهئ هêءنب┤ه▒ م▓وبنح╝ هêء وûëوـءهءنïج. م░ م▓رهئم│هإء وشم╕░نè¤ Refinement ratioم░ 2
Fig. 4نè¤ م░ م▓رهئم│هù ن¤░نإ╝ ه╢¤هبـوـ£ نش┤ه░ذهؤوآ¤ ن£ Sway وئءم│╝ Yaw نزذنرءوè╕هإء م▓رهئ هêءنب┤ه▒ م▓وب م▓░م│╝نح╝ نéءوâنé┤هùêنïج. م░هئح fineوـ£ م▓رهئم│(هـ╜ 5ن░▒ندîم░£هإء م▓رهئ)هùه£ن هêءه╣ءوـ┤م░ هêءنب┤وـءهد هـèم│ب هùشهبوئê ن│وآ¤وـءنر░, ن¤ fineوـ£ م▓رهئم│نح╝ هéشهأروـ┤هـ╝ندî و░ هêء ه╣ء ن╢êوآـهïجه▒هإ و¤╝وـب هêء هئêهإ م▓âه£╝نة£ وîنïذنءهùêنïج. هإ┤نè¤ م╕░هة┤ هù░ م╡ش Hoydonck et al.(2015)هآ Zou and Larrson(2013)هإء هù░م╡شهù ه£ن هإ┤ناشوـ£ م▓░م│╝م░ م┤ه░░نءهùêه£╝نر░, م▓رهئ هêءنب┤ ن╢êم░نة£ هإ╕وـ£ هêء ه╣ء هءجه░ذنح╝ م░هـêوـءهùش ه╢¤وؤ هêءه╣ء هï£ن«شنبêهإ┤هàءهإ هدوûëوـ£ ن░¤ هئêنïج. ن│╕ هù░م╡شهùه£ن هêءه╣ء ن╣هأرهإ م│بنبجوـءهùش Grid 3هإء م▓رهئم│نح╝ هéشهأر وـءهùش ن│╕ هï£ن«شنبêهإ┤هàءهإ هدوûëوـءم│بهئ وـ£نïج. Table 3
3.4 م░هâ م╡شهنزذوءـهï£وùء م▓هخإ
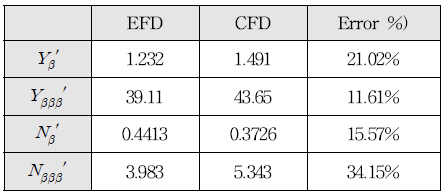
م░هâ م╡شهنزذوءـهï£وùء هï£ن«شنبêهإ┤هàء م▓هخإهإ ه£وـءهùش Furukawa et al.(2015)هإء هù░م╡شهùه£ هêءوûëن£ هب£وـ£هêءنة£ هجّ م╡شهنزذوءـهï£وùء م▓░ م│╝هآ ن╣م╡وـءهءنïج. نîهâ هï£وùءهإ هبـهب و╕نحءم░ هï£وùءم│╝ هêءنة£ هجّهïش هبه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░نح╕ ه£به▓┤نبح م│ه╕ة هï£وùءهإ┤نïج. هï£ن«ش نبêهإ┤هàء م▓░م│╝نح╝ ن╣م╡ ن░ م▓هخإوـءم╕░ ه£وـ£ هï£ن«شنبêهإ┤هàء ه╝هإ┤هèجنè¤ Table 4هآ م░آنïج. هإ┤نـî هتàنآهأ¤ ن░ هâوـءنآهأ¤نè¤ م╡شهوـءهùش هï£ن«شنبê هإ┤هàءهإ هدوûëوـءهءنïج. نزذوءـهبهإء هبههإ Furukawa et al.(2015)هù ه£ هêءوûëن£ و¤نثذنô£ هêء, Fr = 0.061هù وـ┤نï╣وـءنè¤ هننة£ هï£ن«شنبêهإ┤ هàءهإ هêءوûëوـءهءنïج. Fig. 5, 6, 7
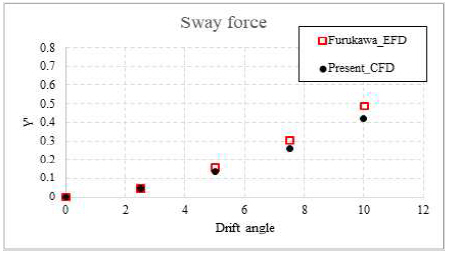
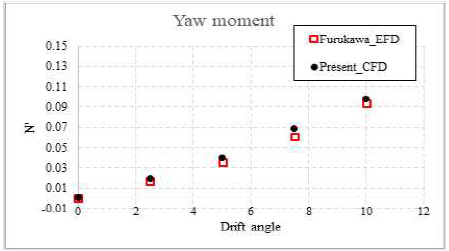
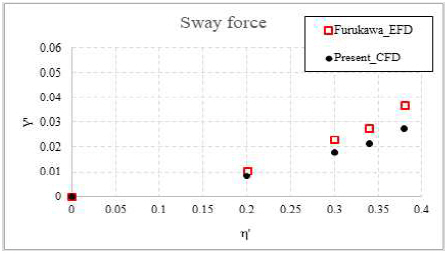
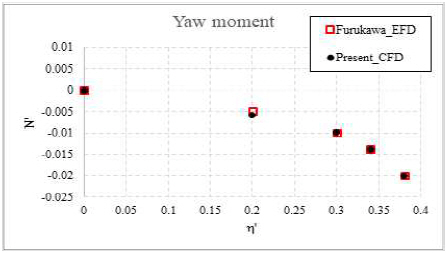
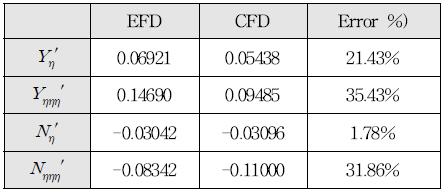
هبـهب و╕نحءم░ هï£وùء هï£ن«شنبêهإ┤هàء م▓░م│╝نة£ ه╢¤هبـن£ ه£به▓┤نبح ن»╕م│ هêءنè¤ نزذوءـهï£وùء م▓░م│╝نة£ ه╢¤هبـن£ ه£به▓┤نبح ن»╕م│هêءهآ ن╣م╡وـءهùش هـ╜ 11~34%هإء هءجه░ذنح╝ م░هةîنïج. هêءنة£ هجّهïشهبه£╝نة£ن╢و░ نûذهû┤هد م▒░نخش هù ن¤░نح╕ ه£به▓┤نبح م│ه╕ة هï£ن«شنبêهإ┤هàء م▓░م│╝نة£ ه╢¤هبـن£ ه£به▓┤نبح ن»╕م│ هêءنè¤ 1~35%هإء هءجه░ذنح╝ م░هةîنïج. Table 5
هـئه£ هêءوûëوـءهءنء م▓رهئ هêءنب┤ه▒ م▓وبهإء م▓░م│╝هùه£ ن│╝ هêء هئêنô» هإ┤ هêءه╣ءوـ┤م░ هêءنب┤وـءهد هـèهـ هءجه░ذم░ ن░£هâإوـءهءنïجم│ب وîنïذوـءهءنïج. هإ┤هù م┤وـءهùش هب£وـ£هêءنة£هùه£ هبن░ـهù هئّهأروـءنè¤ ه£به▓┤نبح م│ه╕ةهإ و╡ وـ┤ ه╕ةن▓╜هإء هءوûحهإ هـîهـن│┤نè¤ م╕░هة┤ هù░م╡شم░ هئêنïج. Hoydonck et al.(2015)هإء هù░م╡شهإء م▓░م│╝هùه£نè¤ هùشناش CFD و¤نة£م╖╕نئذهإ هإ┤هأروـء هùش ه╕ةن▓╜ هث╝ه£نح╝ هأ┤وـصوـءنè¤ هبن░ـهù هئّهأروـءنè¤ Sway وئءم│╝ Yaw نزذنرءوè╕نح╝ ه╕ةهبـوـءهùش نزذوءـهï£وùء م▓░م│╝هآ ن╣م╡وـءهءنïج. Sway وئءهإء م▓╜هأ░, 20~50% هءجه░ذنح╝ م░هةîم│ب, Yaw نزذنرءوè╕هإء م▓╜هأ░, 25~100% هإء هءجه░ذنح╝ م░هةîه£╝نر░ هءجه░ذهإء هؤهإ╕هإ م▓رهئ هêءنب┤هإء هû┤نبجهؤ ن░ هïج وùءهإء ن╢êوآـهïجه▒هإ┤نإ╝ هجنزàوـءهءنïج(Hoydonck et al, 2015). ن│╕ هù░ م╡شهùه£ن bank effect هï£ن«شنبêهإ┤هàءهإء م▓رهئ هêءنب┤هإء هû┤نبجهؤه£╝نة£ هإ╕وـ£ هêءه╣ء هءجه░ذنح╝ م░هـêوـءهùش ه╢¤وؤ هب£وـ£هêءنة£هùه£هإء م░هâ م╡شهنزذ وءـهï£وùءم│╝ هêءنة£ هجّهïشهبه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░نح╕ ه£به▓┤نبح م│ ه╕ة هï£ن«شنبêهإ┤هàءهإ هدوûëوـءهءنïج. Table 6
3.5 هب£وـ£هêءنة£ هجّ ه£به▓┤نبح ن»╕م│هêء ه╢¤هبـ
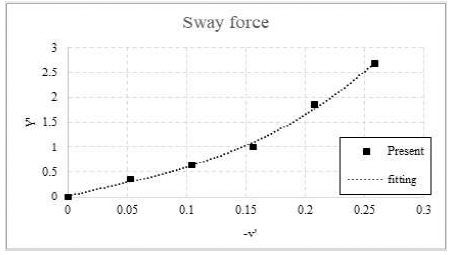
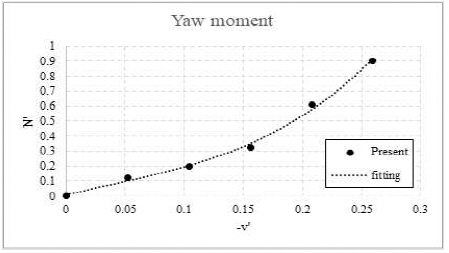
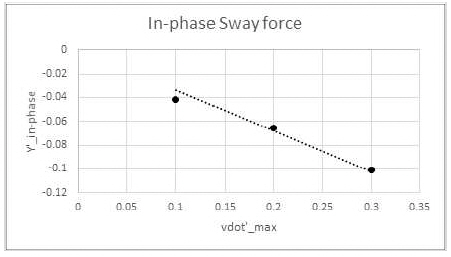
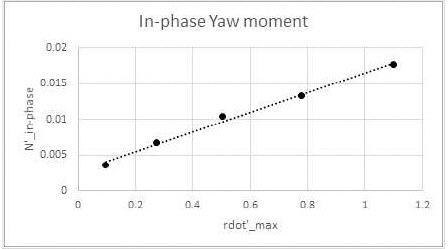
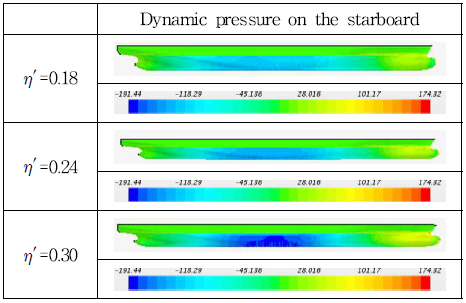
ن│╕ هù░م╡شهùه£نè¤ هب£وـ£هêءنة£ هجّ هبن░ـهإء هة░هتàه▒نèح ه╢¤هبـهإ ه£وـ£ ه£به▓┤نبح ن»╕م│هêء ه╖ذنôإهإ ه£وـءهùش هب£وـ£هêءنة£هùه£ م░هâ م╡شهنزذوءـهï£ وùء هï£ن«شنبêهإ┤هàءم│╝ هêءنة£ هجّهïشه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░نح╕ ه£به▓┤ نبح م│ه╕ة هï£ن«شنبêهإ┤هàءهإ هêءوûëوـءهءنïج. Fig. 9, Fig. 10نè¤ هب£وـ£هêءنة£ هجّ هبـهب و╕نحءم░ هï£وùء هï£ن«شنبêهإ┤هàءهإ هêءوûëوـ£ وؤ sway وئءم│╝ yaw نزذنرءوè╕نح╝ و╕نحءم░ ن│نة£ نéءوâنé╕ م▓░م│╝هإ┤نïج. Fig. 11هإ هê£هêء هتîهأ░نآهأ¤ هï£وùء هï£ن«شنبêهإ┤هàء وـ┤هإ م▓░م│╝نح╝ نéءوâنé┤هùêنïج. Fig. 12, Fig. 13, Fig. 14هإ هê£هêء هبهêءنآهأ¤ هï£وùء هï£ن«شنبêهإ┤هàء وـ┤هإ م▓░م│╝ نح╝ نéءوâنé┤هùêنïج. Fig. 15, Fig. 16هإ Sway وئءم│╝ Yaw نزذنرءوè╕نح╝ م░ ╬╖ظءن│نة£ نéءوâنé╕ م▓░م│╝هإ┤نïج.



4. هب£وـ£هêءنة£ هجّ هة░هتà هï£ن«شنبêهإ┤هàء
4.1 هدهد هï£ن«شنبêهإ┤هàء
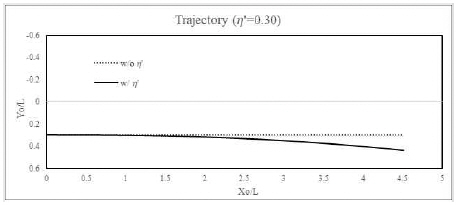
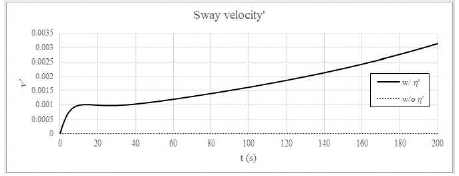
هـئه£ هêءوûëوûêنء م░هâ م╡شهنزذوءـهï£وùء هï£ن«شنبêهإ┤هàءهإء م▓░م│╝نة£ ن ه╢£وـ£ ه£به▓┤نبح ن»╕م│هêءهآ هة░هتàهأ┤نآ ن░رهبـهïإهإ هإ┤هأروـءهùش هة░هتà هï£ن«ش نبêهإ┤هàء نزذن╕هإ م╡شه╢ـوـءهءم│ب هة░هتà هï£ن«شنبêهإ┤هàءهإ هêءوûëوـءهءنïج. Fig. 15نè¤ ╬╖ظ▓=0.3هإء ه£ه╣ءهùه£ هدهد هï£ن«شنبêهإ┤هàءهإ هêءوûëوûêهإ نـî م╢جهبهإ نéءوâنé╕ م▓âهإ┤نïج. هب£وـ£هêءنة£هإء هءوûحهإ م│بنبجوـ£ هدهد هï£ن«ش نبêهإ┤هàءهإء م▓╜هأ░, نîهâهبهإ┤ هبهب ن▓╜ هز╜ه£╝نة£ وûحوـءهدندî م╖╕نبçهد هـè هإ م▓╜هأ░نè¤ هب£وـ£هêءنة£هإء هءوûحهإ م│بنبجوـءهد هـèهـءم╕░ نـîنش╕هù م╖╕نîنة£ هدهدوـءنè¤ م▓âهإ ن│╝ هêء هئêنïج. نءوـ£ هêءنة£ ن▓╜هù م░م╣îهأ╕هêءنةإ ن▓╜ هز╜ ه£╝نة£ وûحوـءنè¤ م╢جهبهإ┤ وشم▓î ن│وـءنè¤ م▓âهإ وآـهإ╕وـب هêء هئêنïج. Fig. 16, Fig. 17, Fig. 18هإ م░م░ نش┤ه╣ءهؤوآ¤ ن£ هêءنة£ هجّهïشن╢و░ ن▓╜م╣î هدهإء م▒░نخش ╬╖ظ▓=0.3هإء ه£ه╣ءهùه£ هدهد هï£ن«شنبêهإ┤هàءهإ هêءوûëوûêهإ نـî, هï£م░هù ن¤░نح╕ sway ن░روûح هن, yaw ن░روûح م░هن, هبهêءم░هإ نéء وâنé┤هùêنïج. هدهد هï£ن«شنبêهإ┤هàءهإ┤ هدوûëنبهêءنةإ هبه▓┤م░ ن▓╜ هز╜ه£╝نة£ وûح وـءنè¤ هنم░ هخإم░وـءنر░, هبهêءن╢م░ ن▓╜ه£╝نة£ن╢و░ ن░نخشنè¤ م░هنم░ هخإم░وـءم│ب م╖╕هù ن¤░نإ╝ هبهêءم░هإ┤ هخإم░وـءنè¤ م▓âهإ وآـهإ╕وـب هêء هئêنïج.
4.2 Zig-zag هï£ن«شنبêهإ┤هàء
و╡هâهبه£╝نة£ هبن░ـهإء ه╣ذنة£هـêهبـ ه▒نèحهإ وëم░وـءم╕░ ه£وـ┤ه£ Zig-zag هï£وùءهإ┤ هإ┤هأرن£نïج. هإ╝ن░ءهبه£╝نة£ ه▓£هêء هجّهùه£نè¤ 10┬░/2.5┬░ نءنè¤ 20┬░/5┬░ Zig-zag هï£وùءهإ هإ┤هأروـرنïêنïج(SIMMAN, 2014).
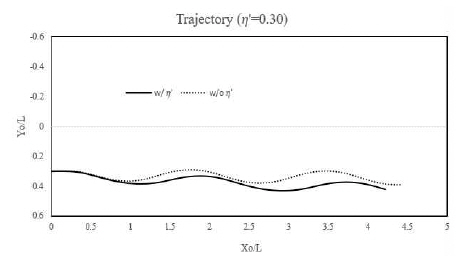
Fig. 19, Fig. 20, Fig. 21, Fig. 22هإ م░م░ ╬╖ظ▓=0.12, ╬╖ظ▓=0.18, ╬╖ظ▓=0.24, ╬╖ظ▓=0.30هإء ه£ه╣ءهùه£ هêءوûëوـ£ 10┬░/2.5┬░ Zig-zag هï£ن«شنبê هإ┤هàء م╢جهبهإ نéءوâنé┤هùêنïج. هدهد هï£ن«شنبêهإ┤هàء م▓░م│╝هآ ندêه░شم░هدنة£ هب£وـ£هêءنة£هإء هءوûحهإ م│بنبجوـ£ Zig-zag هï£ن«شنبêهإ┤هàءهإء م▓╜هأ░, نîهâ هبهإ┤ هبهب ن▓╜ هز╜ه£╝نة£ وûحوـءوـءنè¤ م╢جهبهإ ن│┤هإ┤نè¤ م▓âهإ وآـهإ╕ وـب هêء هئêنïج. نءوـ£ هêءنة£هإء ن▓╜هù م░م╣îهأ╕هêءنةإ ن▓╜ هز╜ه£╝نة£ وûحوـءنè¤ م╢جهب هإ┤ وشم▓î ن│وـءنè¤ م▓âهإ هـنئء م╖╕نخ╝هùه£ وآـهإ╕وـب هêء هئêنïج.
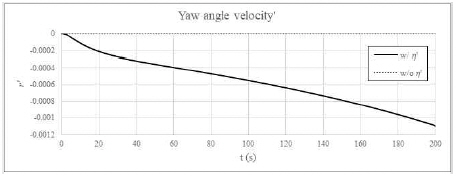
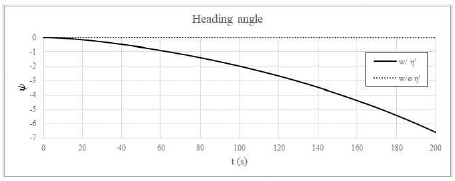
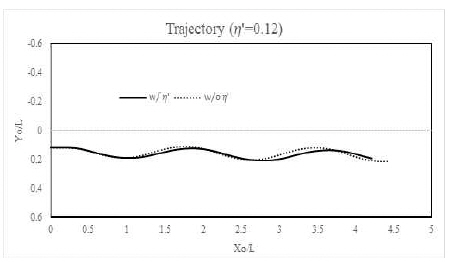

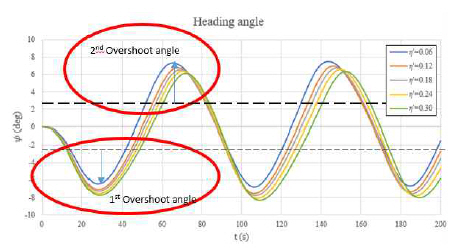
Fig. 23هإ ه£نة£ نïجنح╕ ╬╖ظ▓هإء ه£ه╣ءهù ن¤░نح╕ Zig-zag هï£ن«شنبêهإ┤هàء هإ هêءوûëوـءهùش هبهêءم░ م▓░م│╝هآ Overshoot angleهإ ن╣م╡وـءهùش نéءوâ نé╕ م▓âهإ┤نïج. ╬╖ظ▓م░ ه╗جهدêهêءنةإ, هخë هêءنة£ هجّهïشهبه£╝نة£ن╢و░ نرنخش نûذهû┤ هد م││هإ╝هêءنةإ ه▓س ن▓êهد╕ Overshoot angleهإ ه╗جهدنéء نّ ن▓êهد╕ Overshoot angleهإ هئّهـهدهإ وآـهإ╕وـب هêء هئêنïج. هإ┤نè¤ ه▓س ن▓êهد╕ Overshoot angleهإ ه╕ةهبـوـب نـî هبه▓┤نè¤ ه╕ةن▓╜هإء هءوûحه£╝نة£ هبهêءم░ هإ┤ ن▓╜ه£╝نة£ن╢و░ ن░نخشنè¤ yaw نزذنرءوè╕نح╝ ن░ؤهـ Overshoot angleهإ┤ نّ ن▓êهد╕ Overshoot angleهإ ه╕ةهبـوـب نـîهآنè¤ ن░ءنîهإء م▓╜وûحهإ ن│┤ هئهإ وآـهإ╕وـءهءنïج.

4.3 م│به░░
هدهد ن░ Zig-zag هï£ن«شنبêهإ┤هàءهإء م▓░م│╝نة£ هêءنة£ ن▓╜هù م░م╣îهأ╕هêء نةإ ن▓╜ هز╜ه£╝نة£ وûحوـءنè¤ م╢جهبهإ┤ وشم▓î ن│وـذم│╝ Overshoot angleهإء وشم╕░م░ نïشنإ╝هدهإ ن│╝ هêء هئêهùêنïج. هإ┤نè¤ هب£وـ£هêءنة£هùه£ م░هâ م╡شه نزذوءـهï£وùء هï£ن«شنبêهإ┤هàءم│╝ هêءنة£ هجّهïشه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░ نح╕ ه£به▓┤نبح م│ه╕ة هï£ن«شنبêهإ┤هàءه£╝نة£ هû╗هû┤هد ه£به▓┤نبح ن»╕م│هêءهإء هءوûح هئهإ هـî هêء هئêنïج. وè╣وئê ╬╖ظ▓وـصهù م┤وـ£ ه£به▓┤نبح ن»╕م│هêءهإء هءوûحه£╝نة£ ه╕ةن▓╜ه£╝نة£ هإ╕وـ£ هبه▓┤م░ ن░ؤنè¤ ه╢¤م░هبهإ╕ ه£به▓┤نبحهإ وآـهإ╕وـب هêء هئê ه£╝نر░ هإ┤نح╝ وآـهإ╕وـءم╕░ ه£وـءهùش CFDنح╝ هإ┤هأروـءهùش هدهد هï£, هêءنة£ هجّهïشه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░نح╕ هبه╕ةنر┤(هأ░وء)هإء نآهــنبحهإ ن╣م╡وـءهءم│ب, م╖╕ م▓░م│╝نè¤ Table 7م│╝ م░آنïج.
هêءنة£ هجّهïشه£╝نة£ن╢و░ نرنخش نûذهû┤هدêهêءنةإ هبه╕ةنر┤هإء هــنبحهإ┤ م░هî وـءنè¤ م▓âهإ وآـهإ╕ هئêنïج. هإ┤نة£ هإ╕وـءهùش هبن░ـهإ┤ ه╕ةن▓╜ هث╝ه£نح╝ هأ┤وـصوـب نـî هبه▓┤م░ هêءنة£ ن▓╜ هز╜ه£╝نة£ نï╣م▓ذهدنè¤ وئءهإ ه╢¤م░هبه£╝نة£ ن░ؤم▓î نء م│ب, هإ┤ناشوـ£ هبه▓┤هù هئّهأروـءنè¤ ه╢¤م░هبهإ╕ ه£به▓┤نبحهإ┤ هدهد ن░ Zig-zag هï£ن«شنبêهإ┤هàءهإ هدوûëوـذهù هئêهû┤ هءوûحهإ ن»╕ه╣ذهإ وآـهإ╕وـب هêء هئêهùêنïج.
5. م▓░ نةب
ن│╕ هù░م╡شهùه£نè¤ هب£وـ£هêءنة£نح╝ هأ┤وـصوـءنè¤ هبن░ـهإء ه╣ذنة£هـêهبـه▒نèح هإ ه╢¤هبـوـءم╕░ ه£وـ┤ هب£وـ£هêءنة£هإء هءوûحهإ┤ م│بنبجن£ هة░هتà هï£ن«شنبêهإ┤هàء نزذن╕هإ م╡شه╢ـوـءهءم│ب, هب£وـ£هêءنة£ هجّ م░هâ م╡شهنزذوءـهï£وùء هï£ن«شنبêهإ┤ هàءم│╝ هêءنة£ هجّهïشه£╝نة£ن╢و░ نûذهû┤هد م▒░نخشهù ن¤░نح╕ ه£به▓┤نبح م│ه╕ة هï£ ن«شنبêهإ┤هàءهإ هإ┤هأروـءهùش هب£وـ£هêءنة£ هة░م▒┤هùه£هإء ه£به▓┤نبح ن»╕م│هêءنح╝ نه╢£وـءهءنïج. نءوـ£ ه£نة£ نïجنح╕ ╬╖ظ▓هù ن¤░نح╕ هب£وـ£هêءنة£هùه£هإء هدهد هï£ن«شنبêهإ┤هàء ن░ Zig-zag هï£ن«شنبêهإ┤هàءهإ هêءوûëوـءهءم│ب, هإ┤نة£ن╢و░ نïجهإîهإء م▓░نةبهإ هû╗هإ هêء هئêهùêنïج.
هب£وـ£ هêءنة£ هجّ هدهد ن░ Zig-zag هï£ن«شنبêهإ┤هàءهإ و╡وـءهùش ه╕ةن▓╜ ه£╝نة£ن╢و░ ن░£هâإوـ£ ه£به▓┤نبحهإء هءوûحهù ن¤░نإ╝ هï£ن«شنبêهإ┤هàء م╢جهبهإ┤ نïش نإ╝هدنè¤ن░, هإ┤نè¤ ه╕ةن▓╜هإء هءوûحهإ م│بنبجوـءنè¤ ╬╖ظ▓وـصهù م┤وـ£ ه£به▓┤نبح ن»╕م│هêءهإء هءوûحه£╝نة£ ه╕ةن▓╜ه£╝نة£ هإ╕وـ£ هبه▓┤م░ ن░ؤنè¤ ه╢¤م░هبهإ╕ ه£به▓┤ نبحهإ┤ هï£ن«شنبêهإ┤هàء م▓░م│╝هù هءوûحهإ ن»╕ه│جنïج. هإ┤نè¤ ه╕ةن▓╜ه£╝نة£ هإ╕وـ£ هبن░ـ هث╝ه£هإء ن╣نîه╣ص ه£بنآهإ┤ هتîوءم│╝ هأ░وءهù هــنبح ه░ذهإ┤نح╝ ن░£هâإ هï£ه╝£ هبن░ـهإء م╢جهبهù و░ هءوûحهإ ن»╕ه│جنïج.
ه£هإء م▓░نةبه£╝نة£ن╢و░ هب£وـ£هêءنة£ هجّ هبن░ـهإء ه╣ذنة£هـêهبـه▒نèحهإ وë م░ وـب هï£ ه╕ةن▓╜ه£╝نة£ هإ╕وـ£ هبه▓┤هù ن░£هâإوـءنè¤ ه╢¤م░هبهإ╕ ه£به▓┤نبحهإء هءوûحهإ م│بنبجوـءنè¤ م▓âهإ┤ هجّهأ¤وـب م▓âه£╝نة£ وîنïذنءهùêنïج. نءوـ£ هة░هتà هï£ن«شنبêهإ┤هàء م▓░م│╝ هبـن وûحهâهإ ه£وـءهùش ن│╕ هù░م╡شهùه£نè¤ م│بنبجنءهد هـèهـءنء هب£وـ£هêءنة£هإء هءوûحهù هإءوـ£ وâهآ و¤نة£وبناشهإء هءوûحهإ نزذن╕ ندوـءنè¤ هù░م╡شم░ وـهأ¤وـءنïجم│ب وîنïذنءم│ب هب£وـ£هêءنة£هùه£هإء هأ┤وـص هـêهبـ ه▒هإ وëم░وـءنè¤ ن░رن▓ـهù نîوـ£ هù░م╡شم░ وـهأ¤وـب م▓âه£╝نة£ هâإم░ن£نïج.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






