

1. ýäť Űíá
2. ýłśÝĽÖ۬ĘŰŹŞ Ű░Ć ýśłýŁŞýĽłýáĽýä▒ ŕŞ░ýĄÇ
2.1 ýłśÝĽÖ۬ĘŰŹŞ
2.2 ýśłýŁŞýĽłýáĽýä▒ ŕŞ░ýĄÇ

3. ýłśý╣śýŻöŰôť ŕ▓ÇýŽŁ
3.1 Ű░öýžÇ 1BýŁś ýśłýŁŞÝĽ┤ýäŁ

3.2 Ű░öýžÇ 2BýŁś ýśłýŁŞÝĽ┤ýäŁ

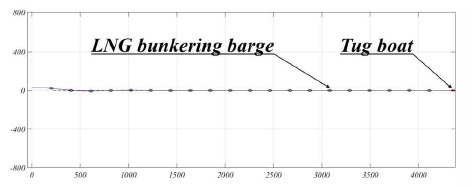
4. LNG Ű▓Öý╗ĄŰžü Ű░öýžÇýŁś ýśłýŁŞýĽłýáĽýä▒ ÝĽ┤ýäŁ
4.1 ŰîÇýâüýäá Ű░Ć ÝĽ┤ýäŁýí░ŕ▒┤


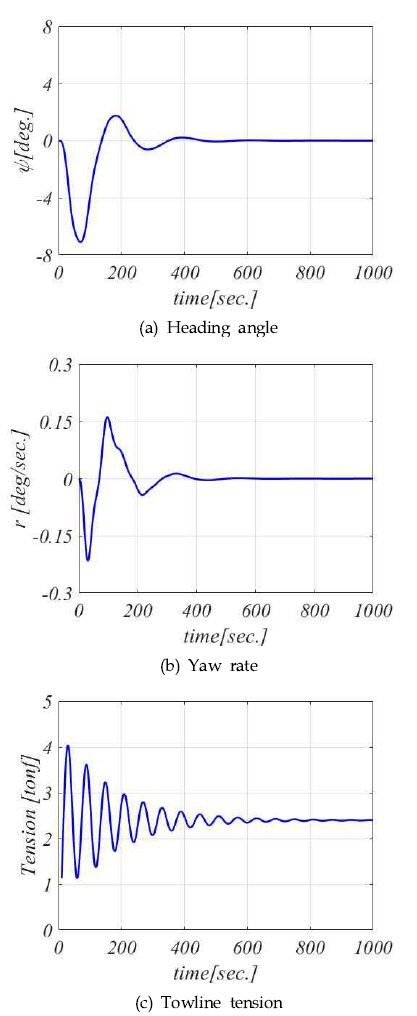
4.2 ýŐĄý╝ÇŕĚŞŕ░Ç Ű»ŞŰÂÇý░ęŰÉť LNG Ű▓Öý╗ĄŰžü Ű░öýžÇýŁś ýśłýŁŞýĽłýáĽýä▒ ÝĽ┤ýäŁ
4.3 ýäáŰ»Ş ýŐĄý╝ÇŕĚŞ Ű│ÇÝÖöýŚÉ Űö░ŰąŞ ýśłýŁŞ ýĽłýáĽýä▒ Ű│ÇÝÖö

4.4 ŰŞîŰŁ╝ýŁ┤ŰôĄ(bridle) પýŁ┤ Ű│ÇÝÖöýŚÉ Űö░ŰąŞ ýśłýŁŞ ýĽłýáĽýä▒ Ű│ÇÝÖö

4.5 Skegŕ░Ç ŰÂÇý░ęŰÉť LNG Ű▓Öý╗ĄŰžü Ű░öýžÇýŁś ýśłýŁŞýĽłýáĽýä▒ ÝĽ┤ýäŁ

5. ŕ▓░ Űíá
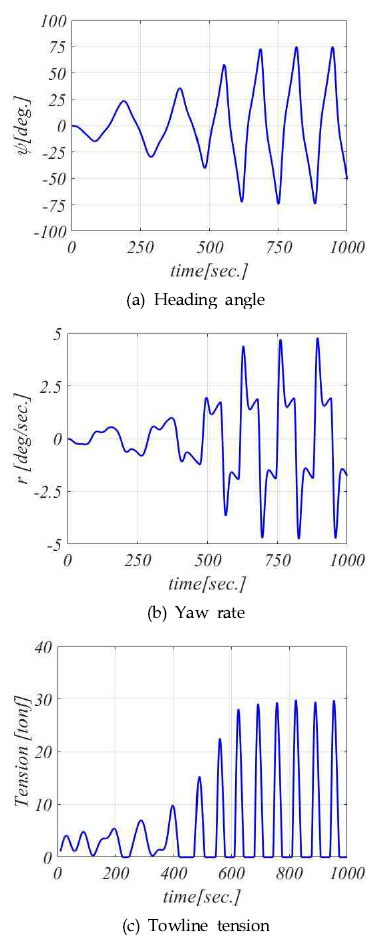
(1) ýäáŰ»Ş ýŐĄý╝ÇŕĚŞ Űę┤ýáü Ű│ÇÝÖöýŚÉ ŰîÇÝĽť ýśłýŁŞÝĽ┤ýäŁýŁä ÝćÁÝĽ┤ ýäáŰ»Ş ýŐĄý╝ÇŕĚŞýŁś Űę┤ýáüýŁ┤ ýŽŁŕ░ÇÝĽáýłśŰíŁ ý┤łŕŞ░ ýÖŞŰ×ÇýŚÉ ýŁśÝĽť ýäáýłśŕ░üýŁ┤ ýőťŕ░ä ýŚÉ ýžÇŰéĘýŚÉ Űö░ŰŁ╝ ŰŹöýÜ▒ Ű╣ĘŰŽČ ŕ░ÉýćîÝĽśýŚČ ýŤÉŰלŰ░ęÝľąýť╝Űíť ŰĆîýĽäýśĄŰŐö ŕ▓âýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ. ýŁ┤ŰŐö ýőŁ (24)ýŁś ýśłýŁŞýĽłýáĽýä▒ ýí░ŕ▒┤ýŁś ýáĽýä▒ýáüýŁŞ ÝĽ┤ýäŁŕ│╝ ýŁ╝ý╣śÝĽťŰőĄ. ŰőĄýľĹÝĽť ýäáŰ»Ş ýŐĄý╝ÇŕĚŞ Űę┤ýáüýŚÉ ŰîÇÝĽť ýśłýŁŞÝĽ┤ýäŁ ŕ▓░ŕ│╝Űą╝ ÝćÁÝĽśýŚČ ýäáŰ»Ş ýŐĄý╝ÇŕĚŞ Űę┤ýáüýŁ┤ 4 m2 ýŁ┤ýâüýŁ┤ ýáüýáĽÝĽá ŕ▓âýŁ┤ ŰŁ╝ ÝîÉŰőĘŰÉťŰőĄ.
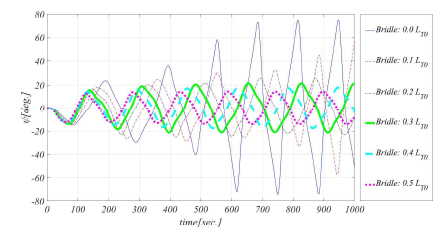
(2) ŰŞîŰŁ╝ýŁ┤ŰôĄýŁś પýŁ┤ Ű│ÇÝÖöýŚÉ ŰîÇÝĽť ýśłýŁŞÝĽ┤ýäŁýŁä ÝćÁÝĽ┤ ŰŞîŰŁ╝ýŁ┤ ŰôĄýŁś પýŁ┤ŕ░Ç ýŽŁŕ░ÇÝĽĘýŚÉ Űö░ŰŁ╝ ý┤łŕŞ░ ýÖŞŰ×ÇýŚÉ ýŁśÝĽť ýäáýłśŕ░üýŁ┤ ýőťŕ░ä ýŁ┤ ýžÇŰéĘýŚÉ Űö░ŰŁ╝ ŰŹöýÜ▒ ýĽłýáĽÝÖö ŰÉśŰŐö ŕ▓âýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ. ŰŞîŰŁ╝ýŁ┤ŰôĄ ýŁś પýŁ┤ŕ░Ç ýŽŁŕ░ÇÝĽśŰŐö ŕ▓âýŁÇ xTŕ░Ç ýŽŁŕ░ÇÝĽĘýŁä ýŁśŰ»ŞÝĽśŰę░ ýőŁ(24)ýŁś ýśłýŁŞýĽłýáĽýä▒ ýí░ŕ▒┤ýŚÉýäť xTýŁś ýŽŁŕ░ÇŰíť ýŁŞÝĽť ýśłýŁŞýĽłýáĽýä▒ ÝľąýâüýŁ┤ŰŁ╝ ŰŐö ýáĽýä▒ýáüýŁŞ ÝĽ┤ýäŁŕ│╝ ýŁ╝ý╣śÝĽťŰőĄ. ŰőĄýľĹÝĽť ŰŞîŰŁ╝ýŁ┤ŰôĄýŁś પýŁ┤ýŚÉ ŰîÇ ÝĽť ýśłýŁŞÝĽ┤ýäŁ ŕ▓░ŕ│╝Űą╝ ÝćÁÝĽ┤ ŰŞîŰŁ╝ýŁ┤ŰôĄýŁś પýŁ┤ŰŐö 0.2LT0 ýáĽŰĆäŕ░Ç ýáüýáĽÝĽá ŕ▓âýť╝Űíť ÝîÉŰőĘŰÉťŰőĄ.
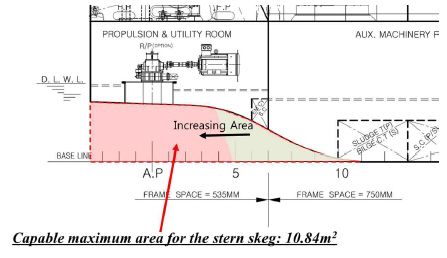
(3) ýÁťýóůýáüýť╝Űíť ýäĄŕ│äŰÉť ýäáŰ»Ş ýŐĄý╝ÇŕĚŞŕ░Ç ŰÂÇý░ęŰÉť LNG Ű▓Öý╗ĄŰžü Ű░öýžÇýŁś ýśłýŁŞÝĽ┤ýäŁýŁä ýłśÝľëýŁä ÝćÁÝĽ┤ ýäĄŕ│äŰÉť ýŐĄý╝ÇŕĚŞ Űę┤ýáüýŁś ýáüýáĽýä▒ ýŁä ÝÖĽýŁŞÝĽśýśÇŰőĄ.
 PDF Links
PDF Links PubReader
PubReader Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






