고차스펙트럼을 이용한 선체 종동요의 비선형적 거동에 관한 해석
Higher Order Spectral Analysis of Non-linear Pitching Motion
Article information
Abstract
선체의 비선형적 동요현상은 선박의 감항성 확보와 관련하여 최근 활발하게 연구가 이루어지는 분야들 중 하나이다. 본 연구에서 는 고차 스펙트럼 해석방법들 중 하나인 바이스펙트럼 해석방법과 바이코히어런스 해석방법을 적용하여 선체의 비선형적인 동요 현상을 해 석 하였다. 본 연구를 통해 기존에 알려진 추파상황에서의 비선형적 선체 종동요 현상과 더불어 추사파 및 우현 횡파 상황에서도 선체 종동요 의 비선형 위상 동조 현상이 일어나는 것을 확인하였다. 또한, 바이코히어런스 방법을 통해 주파수간 비선형적 간섭현상을 수치화 하여 주파 수 대역별로 위상 동조 현상을 비교할 수 있었다. 이를 통해 선체 종동요의 파워스펙트럼상의 피크 주파수 이외의 주파수 대역에서 비선형적 위상결합이 더 강하게 일어난다는 사실을 확인하였다. 이에 더하여, 바이코히어런스 해석방법은 정규화 방법에 크게 영향을 받지 않는 다는 사실 또한 확인하였다.
Trans Abstract
The estimation of non-linear ship motion is one of the most important issues in recent studies of ship stability. In this paper, bispectral analysis and bicoherence analysis were introduced in order to analyze the non-linear ship motion. In addition to the previously observed non-linear pitching motion in following seas, this study observed the non-linear phase coupling of pitching motion in following & quartering seas, and starboard beam seas. By comparing phase coupling between each frequency quantitatively via the bicoherence analysis, it was confirmed that non-linear phase coupling was much stronger in frequency regions other than the peak frequencies of a power spectrum. Furthermore, it was found out that the results of bicoherence calculation were analagous to each other, although the different normalization methods were applied.
1. 서 론
파랑 중 항행 선박의 내항성을 유지하는 것은 조선 해양 공학자들의 주요 관심사들 중 하나이다(Kong et al, 2004).
특히 내항성에 관계되는 요소 중, 선체 운동방정식에서 비 선형인 복원력 항에 기인한 선체의 비선형적인 동요 현상에 대한 규명은 선체의 동적 안정성 향상을 위하여 해결해야 할 중요한 과제들 중 하나이다. 실제로, 1998년 북태평양에서 발 생한 미국의 C11급 Post-Panamax 선박의 파라메트릭 횡동 요로 인해 다수의 컨테이너를 분실한 사례가 보고 된 바 있 다. 또한, 추파 상황에서의 비선형적인 동요 현상 또한 다수 보고 되고 있어, 국제해사기구(IMO)에서는 사고 예방을 목 적으로 선박의 동적 안정성에 관한 규정을 수정(Park et al, 2012; Kim et al., 2010) 할 계획이다.
이와 같은 비선형적 선체 동요 현상의 발생을 예측하기 위 해 Mathieu equation을 이용한 방법 (Nayfeh,1988), Rankine Panel method를 이용한 방법 (France et al, 2003) 등이 적용 되어 유의미한 결과를 얻었다. 한편, 발생된 비선형적 동요 현상의 해석 시, 선형 이론에 기반을 둔 파워스펙트럼 해석 방법은 위상 정보의 누락이나, Energy leak 현상이 발생하는 등 (Iseki, 2007) 적절하지 못한 것으로 보고되었다. 이에 대 해 Iseki (2007)는 고차스펙트럼 방법을 선체 운동 해석에 처 음으로 적용하여 추파 상황에서의 비선형적 선체 종동요 현 상 해석에 사용하였으나, 신호의 위상 동조 현상을 정량적으 로 비교할 수 없는 등의 한계가 있었다.
본 연구에서는 선체의 비선형적 동요 특성을 파악하기 위 해 고차스펙트럼 방법을 적용한 후 이를 정규화한 바이코히 어런스 방법을 도입하였다. 가장 먼저, 바이스펙트럼 밀도함 수의 정의와 특성을 살펴보았다. 그 후, 비선형성과 밀접한 관련이 있는 왜도를 구하였는데, 선체 종동요와 횡동요 중 종동요에 대해 왜도 값들이 높은 값을 띔에 따라 본 연구에 서는 선체 종동요에서 비선형성이 더 높게 나타내어질 것으 로 판단, 종동요의 해석에 바이스펙트럼을 적용하였다. 이를 통해, 기존 파워스펙트럼에서는 확인할 수 없었던 신호간 위 상 동조 현상을 파악하여, 선체 운동 시스템이 비선형적일지 여부를 판단할 수 있었다. 또한, 바이코히어런스 방법을 이용 하여 주파수 간 위상 동조 현상의 강도를 수치화 하여 나타 내었다. 이에 대한 해석을 수행한 결과, 기존의 추파 상황에 더하여, 우현횡파 및 추사파 상황에서의 비선형적인 선체 종 동요 현상을 확인할 수 있었다. 이에 더해, 연구의 신뢰성을 확보하기 위해, 서로 다른 바이코히어런스의 정규화 방법에 따른 결과를 비교하여, 두 바이코히어런스 값들의 크기와 위 치 등이 거의 유사하다는 것을 판별하였다.
2. 바이스펙트럼의 적용
2.1. 바이스펙트럼 밀도함수의 정의
본 절에서는 바이스펙트럼 밀도함수의 정의와 특성을 요 약하였다. 먼저, 바이스펙트럼과의 비교를 위해 정상 시계열
와 같이 정의 되며,
자기상관함수
여기서 삼차 모멘트 Rxxx (τ1, τ2)는
와 같이 정의된다.
2.2. 바이스펙트럼 밀도함수의 물리적 특성
은 시계열의 분산을 의미한다. 이와 유사하게, 바이스펙트 럼 밀도함수의 실제 영역(Real part)의 이중적분은
왜도(비대칭도)와 유관하다(Elgar, 1987). 여기에서, 가우 시안(Gaussian)을 판별하는 기준인 왜도와 비선형성의 관계 에 대해 간략히 살펴보도록 한다. 입력 신호가 가우시안 분 포(Gaussian)를 따르고, 출력 신호가 가우시안 분포를 따르 지 않을 경우(Non-Gaussian)에는 그 수학적 성질에 의해 시 스템이 비선형적일 것으로 추측할 수 있다. 이와같이, 왜도는 시스템의 비선형성과 매우 밀접한 관계가 있지만, 시스템의 비선형성 그 자체를 의미하지는 않는다는 것에 유의하여야 한다. 본 연구에서는 입력신호(해양파)에 대한 자료가 부족 한 관계로, 기존에 수행되었던 연구들과 유사하게(Iseki, 2007), 해양파의 Gaussian 성을 상정하고 연구를 진행하였다. 한편, 파워스펙트럼에서의 대칭성
과 같은 대칭 관계를 가지며, 이를 그림으로 나타내면 아 래의 Fig. 1과 같다.

Symmetry regions of bispectrum
그림에서 C는 켤레복소수 영역을 의미하고, 은 Nyquist 주파수를 의미한다.
2.3. 바이스펙트럼을 이용한 비선형 신호의 해석
상술한 바이스펙트럼이 시스템의 비선형 해석에 어떻게 적용 되어지는 지에 대하여 알아보기 위해, 우선 간단한 예 를 들어 논하여 보도록 한다. 먼저, 입력신호
을 통과한다고 가정(Nikias et al, 1993)하자. 이때, c는 0이 아닌 상수이다. 2차의 연산 시스템 Y(t) 를 거친 출력신호는 주파수와 위상이 각각, (f1, ϕ1) , (f2,ϕ2) , (2f1,2ϕ1) , (2f2,2ϕ2) ,(f1 + f2, ϕ1 + ϕ2)와(f1 - f2, ϕ1 - ϕ2)인 코사인항들 의 합으로 나타내어진다. 여기서 주의할 점은, 주파수가 서로 더해지면 위상도 서로 더해지는 것처럼 신호들의 주파수들과 위상들의 관계가 정확히 동일하다는 것이다. 예를 들어, (f1,ϕ1)과 (2f1,2ϕ1)는 비선형적 연산에 의한 위상 동조 (Quadratic phase coupling)된 신호들이라고 할 수 있으나, (f1,ϕ1)와 (2f1,ϕ1)는 위상 동조와 무관한 신호들이라 볼 수 있다. 이와 같이, 각 신호들의 위상 관계를 확인함으로서 신 호들이 위상 동조 현상이 일어났는지 여부를 판단할 수 있 고, 이를 통해 시스템이 비선형적인지 여부를 판단할 수 있 다. 비슷한 예로, 비선형 시스템을 통과한 출력신호 Y(t) 가
와 같다고 하자. 이때, f3 = f1 + f2 이고, f6 = f4 + f5 이며, 위상 ϕ1,ϕ2, , ϕ5들은 모두 독립이고 구간 (0,2π)에서 무작 위의 값을 갖으며, ϕ6 = ϕ4 + ϕ5인 관계를 갖는다고 가정한다 (Raghuveer and Nikias, 1985). 따라서, 주파수 f6는 f4 와f5 의 위상 동조와 관련된 항이라 할 수 있고, f3는 독립적인 주 파수 신호라 할 수 있다. 위 신호에서 식(5)의 3차 모멘트 시 퀀스를 구해보면,
와 같이 되는데, 여기서 볼 수 있듯이 위상 동조에 관여한 항들에 대해서만 그 값들이 나타내어진다는 것을 확인 할 수 있다. 실제로, 출력신호Y(t) 의 파워스펙트럼과 바이스펙트럼 을 구해보면 Fig. 2와 같은 결과가 나오게 된다. 이와같이, 파 워스펙트럼에서는 출력신호의 모든 성분 주파수가 검출되어 지는 반면, 바이스펙트럼 상에서는 위상 동조 현상이 일어난 f4 와 f5 에 대해서만 그 값들이 표현된다.

Power spectrum and magnitude bispectrum of a sequence described in Eq.13
2.4. 바이코히어런스의 계산
바이스펙트럼 밀도함수와 더불어 본 연구에서는 위상 동 조의 정도를 수치화하기 위해 바이코히어런스를 도입하였다. 현재까지 바이코히어런스를 계산하는 여러 방법들이 제안되 었지만, 기존에 많이 쓰인 Haubrich 바이코히어런스의 경우 값이 1을 넘는 등 (Kim and Powers, 1979) 물리적인 의미 해석에 어려운 정의들이 많아, 본 연구에서는 그 값들을 0과 1사이에 한정할 수 있는 Kim 과 Powers(1979)에 의한 정의
와 Hagihara(2001)에 의한 정의
를 적용하였다. 이를 통해 구한 바이코히어런스 값이 1에 가까울수록 주파수간 비선형적인 위상 동조 현상이 크고, 0 에 가까울수록 위상 동조 현상이 작다고 해석할 수 있다. 한 편, 정의 (15)과 (16)에서 B (f1,f2)는 바이스펙트럼 밀도함수 가 아닌 샘플링 주기를 고려하지 않는 바이스펙트럼을 의미 함에 유의하여야 한다.

The training ship Shioji-maru
3. 선체 동요의 측정
실제 선박의 동요 현상을 측정하기 위해 도쿄해양대학의 실습선 Shioji-maru를 이용하여 2012년 1월 25일에 실선 관 측을 수행하였다. 당시 실험에 사용된 선박의 제원은 아래 Table 1과 같다. 또한, Fig. 4는 당시 실험이 진행된 일본 Chiba의 Sunosaki cape 인근 해역과 선박의 항적을 나타낸 다.

Principal particulars of T.S. Shioji-maru

The experimental area at the south of Sunosaki cape and the ship trajectory
한편, 시간대 별 측정 구간은 Table 2에 나타내어져 있으 며, Table 3은 실험 당시 침로에 따른 선박의 속도와 진풍향 및 풍속을 나타낸다. 실험이 진행되는 동안 일본 기상청에 의해 보고된 해당 해역의 풍파는 파고 약 1.0~1.5m, 주기 6~7초, 파향 200~240도였고, 너울은 파고 2~3m, 주기 8~ 10초, 파향은 약 200도였다.

Time span of each run

Ship course and the sea conditions
한편, Fig. 5는 T.S. Shioji-maru의 데이터 측정 시스템을 나타낸다. 이 시스템에서는 광섬유 자이로와 내장된 GPS 시 스템을 이용(일본 항공 전자 공업사, JCS7401 모델)하여 샘 플링 주기인 0.1초 마다 선체의 동요와 위치를 측정한 후, RS-232C 포트를 통해 노트북에 데이터를 전송한다. Fig. 6 는 이와 같은 실선 관측을 통해 얻어진 전체 종동요 (pitching)와 횡동요(rolling)의 시계열이다. 전체 관측은 5534.9초 동안 수행되었는데, 본 연구에서는 전체 관측 수행 구간 중 우현 횡파 상황(Run D)와 추사파 상황(Run E)에서 의 선체 거동 특성을 조사하였다. 여기서, 각 상황 별로 4096 개의 데이터가 선정되어(Run D: 2695.0~3104.5 sec, Run E: 3895.0~4304.5 sec) 해석에 사용되었다.

Data acquisition system

Time series of pitching and rolling motion
한편, 바이스펙트럼 해석에 앞서 선체 동요의 비선형성 특 성이 어느 운동에서 더 두드러질 것 인가를 예측해 보기 위 해, 식 (7)을 이용하여 해당 신호의 왜도를 먼저 계산하였다. Table 4는 구간 D와 E에서 종동요와 횡동요의 왜도를 나타 낸다. 여기서, 왜도는, 식 (7)과 (8)에서 상술한 바와 같이 출 력신호 (종동요와 횡동요)의 비선형성과 밀접한 관련이 있다.

Skewness of both pitching and rolling
우현 횡파 상황 (Run D) 에서는 종동요와 횡동요 모두 non-gaussian 하다는 것을 확인 할 수 있다. 또한, 추사파 상 황인 Run E에서 종동요는 non-gaussian인 반면, 횡동요의 왜도 값은 거의 0에 가까워 gaussian 하다는 것을 확인할 수 있다. 따라서, 본 연구에서는 Table 4에서 확인된 바와 같이 선체의 종동요가 횡동요 보다 왜도가 더 큰 값을 나타내므 로, 비선형적인 특성을 보일 것으로 예상됨에 따라, 종동요의 비선형성의 보다 정밀한 해석을 위해 바이스펙트럼을 적용하 였다.
또한, Fig. 7 는 두 상황에서의 종동요(pitching)의 파워스 펙트럼을 나타낸다. Run D의 경우 약 0.11hz에서, Run E의 경우 약 0.078hz에서 각각 피크 주파수를 나타내는 것을 확 인할 수 있다.

Power spectrum of pitching motion (Run D and Run E)
4. 바이스펙트럼 적용 결과
보다 엄밀한 비선형성의 판별을 위해 각각의 상황에 대한 바이스펙트럼 밀도함수의 크기(magnitude)를 계산하였다. 실 제 바이스펙트럼 밀도함수의 계산은 4096 개의 데이터 샘플 을 8 구간으로 나누어 각 바이스펙트럼의 추정치의 평균을 구하는 방식(Nikias et al., 1993)으로 수행되었다.
Fig. 8에서 Run D의 경우 (0.11hz, 0.11hz), (0.23hz, -0.11hz)와 (0.11hz, -0.23hz)에서 피크 값이 나타난 것을 알 수 있다. Run E에서는 (0.07hz, 0.07hz), (0.156hz, -0.078hz) 와 (0.078hz, -0.156hz)에서 피크 값이 나타났다. 여기서 중요 한 점은, Fig. 7의 파워스펙트럼에서는 확인할 수 없었던, 위 상 동조 현상의 파악이다. Run D의 파워스펙트럼의 경우 0.11hz(피크주파수), 0.15hz, 0.22hz에서 각각 높은 값들을 띄 고 있음을 알 수 있으나, 비선형적인 시스템에 의한 위상이 동조 된 신호가 있는지 여부나, 위상 동조 된 신호가 만약 있 을 경우, 정확히 어떤 신호가 위상이 동조된 신호인지를 파 악하지 못한다. 반면, 바이스펙트럼을 이용하여 해석한 결과, =f2=0.11hz 대역에서의 신호와 0.22hz대역에서의 신호는 선체의 동요(시스템)의 비선형적 거동 특성에 기인한 위상 동조가 있음을 확인할 수 있다. 마찬가지로 Run E의 파워스 펙트럼의 경우 0.078hz(피크주파수), 0.1hz, 0.15hz에서 각각 높은 값들을 나타내는데, 바이스펙트럼을 이용하여 해석을 수행하면, =f2=0.078hz대역에서의 신호와 그 합 0.15Hz은 선체의 비선형적 거동 특성에 의하여 서로 위상 동조의 관계 에 있음을 파악할 수 있다.

Magnitude bispectrum of pitching motion (Run D(upper figure) and Run E(bottom figure))
한편, 이와 같은 바이스펙트럼은 분산 값 (신호 자체의 크 기)으로 인해 각 신호간의의 위상 동조의 정도를 파악하는데 에 있어서는 객관적이지 못할 수 있다는 한계가 지적(Kim and Powers, 1979) 되어 왔다. 따라서 본 연구에서는, Run D 와 Run E 중 어느 구간이 더 비선형성을 나타내는가를 확인 해 보기 위하여, 신호 자체의 크기와는 무관하게 실제 위상 동조의 정도를 표현 할 수 있는 바이코히어런스를 추가로 구 하였다.
Fig. 9는 우현 횡파와 추사파의 상황 시 선체의 종동요에 대한 바이코히어런스 값들을 나타낸다. 상기에 기술하였듯 바이코히어런스 값이 0에 가까울수록 위상 동조 현상이 일어 나지 않았다고 볼 수 있으며, 1에 가까울수록 위상 동조 현상 이 많이 일어났다고 볼 수 있다. 시스템의 비선형성 판별을 위한 바이코히어런스 값의 기준에 대해서는 현재 이론적으로 정립된 수치는 없으나, 통상 0.3이상이면 높은 수준의 위상 동조 현상이 이루어졌다 판단한다 (J. Soucek et al, 2003). Fig. 8와 Fig. 9의 비교를 통해 바이코히어런스 방법을 이용 하면 바이스펙트럼 밀도함수에서는 확인할 수 없었던, 피크 주파수 이외의 영역들에 대해서도 위상 동조 현상이 있음을 파악 할 수 있고 그 정도 또한 수치화 것을 확인할 수 있다. 예를들어 Run D의 경우, 바이스펙트럼 밀도함수에서는 (0.117hz, 0.117hz)에서 피크를 나타내는 반면에, 바이코히어 런스 값은 0.43으로 높은 수준의 위상 동조 현상이 있다는 것 을 확인 할 수있지만, 0.71의 바이코히어런스 값을 나타내는 (0.078hz, 0.058hz) 주파수 영역과 0.75의 값을 나타내는 (0.017hz, 0.136hz) 보다는 낮은 것을 확인 할 수 있다. 또한, Fig. 9에 나타난 값들에서 볼 수 있듯이, Run D와 Run E 모 두에서 높은 수준의 비선형적인 위상동조 현상이 있다는 것 을 파악할 수 있다. 한 가지 흥미로운 사실은 Run D에서 Run E 상황에 비하여 전체적으로 약간 더 높은 수준의 위상 동조를 나타낸다는 점으로, 이는 Table 4 의 결과와 상반된 다. 그 이유는 바이스펙트럼과 바이코히어런스를 구할 때는 실제영역(Real part)와 허수영역(Imaginary part) 모두를 고 려하는 반면, 왜도는 바이스펙트럼의 실제영역에만 관계가 있기 때문이라 판단된다. 한편, 우현 횡파상황(Run D)에서 실제로 선체 종동요에 더 많은 영향을 미칠 것으로 판단되는 추사파 상황(Run E)에서 보다 선체 종동요의 비선형적 특성 이 더 나타난 원인에 대해서는, 추후 Cross-Bispectrum을 이 용하여 연성 운동의 해석 등을 통해 규명해 나갈 계획이다. 이에 더해, 본 연구에서는 바이코히어런스 계산의 신뢰성을 확보하기 위해 2.4절에 기술된 바이코히어런스 계산법들이 Run D 상황에 각각 적용되었는데, Fig. 9의 첫 번째 그림과 두 번째 그림에서와 같이 위상 동조 현상이 일어나는 주파수 대역들의 분포와 값들이 대체로 서로 유사함을 알 수 있다.
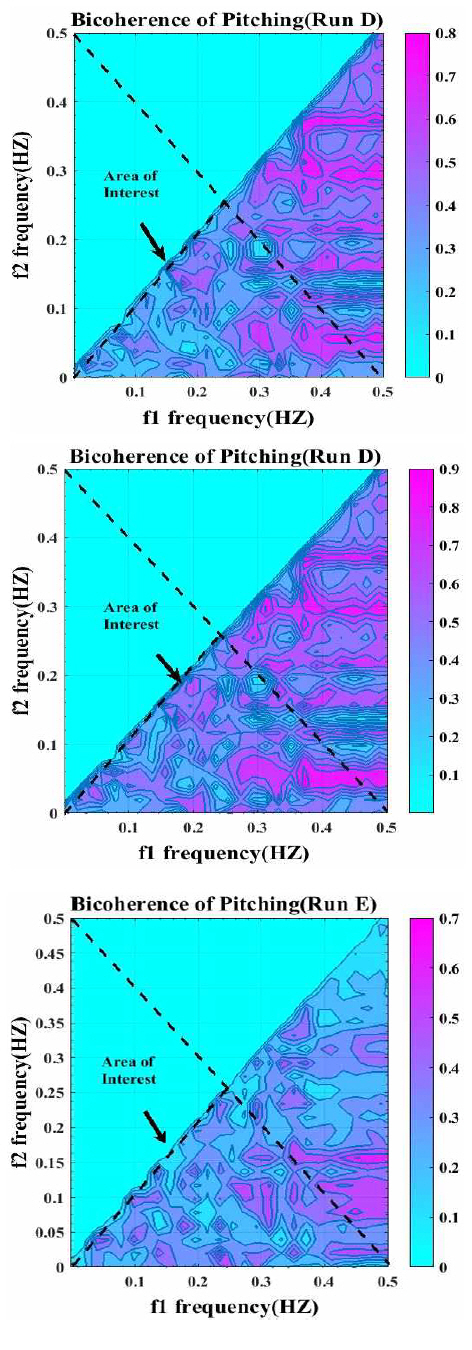
Bicoherence of run D from Kim's definition (upper figure), Hagihara's definition (middle figure), Bicoherence of Run E from Kim's definition (bottom figure)
5. 결 론
고차스펙트럼 방법과 그것을 정규화 하는 바이코히어런스 방법을 적용하여 선체의 비선형적 동요 현상에 관계되는 위 상 동조현상의 발생에 대하여 살펴보았다. 얻어진 결과를 바 탕으로 아래와 같은 세 가지 결론을 요약할 수 있다.
바이스펙트럼을 이용하여 위상 동조 현상이 발생한 신호 를 구별할 수 있었으며, 이를 통해 우현 횡파 및 추사파 상황 에서 각각 선체 종동요의 비선형성을 확인할 수 있었다.
바이코히어런스를 이용하여, 피크 주파수 이외의 주파수 대역에서도 비선형적인 위상 동조 현상이 높은 수준으로 발 생한다는 사실을 확인하였다. 또한, 우현횡파 상황에서 추사 파 상황보다 선체 종동요의 비선형성이 더 높게 나타나는 것 을 확인 할 수 있었다.
Kim and Powers에 의해 제안된 바이코히어런스 방법과 Hagihara에 의해 제안된 바이코히어런스 방법이 서로 유사 한 결과를 나타낸다는 것을 확인하였다.
선체의 동요 현상 해석 시 기존의 선형시스템 해석에 주 로 사용되어온 파워스펙트럼 방법과 비선형적 위상 동조 현 상 판별 및 해석에 사용되는 바이스펙트럼, 바이코히어런스 방법들을 병행하여 적용하면 더 정확한 해석이 가능할 것으 로 생각된다. 특히 이러한 해석방법은 기존 선체 운동방정식 의 복원력 항이 고차 항인지 여부를 판단하는데 쓰일 수 있 을 것으로 판단되며, 이를 통해 보다 정밀한 선체운동방정식 을 구할 수 있을 것으로 기대된다. 한편, 실질적으로 종동요 에 크게 영향을 미치지 않을 것으로 예상하였던 우현 횡파 상황에서의 비선형적인 종동요 현상이 관측됨에 따라 이러한 현상에 대한 추가적인 연구가 필요할 것으로 판단된다.